空间后交-前交程序设计实验报告
上机实验报告(精选11篇)

上机实验报告篇1用户名se××××学号姓名学院①实验名称:②实验目的:③算法描述(可用文字描述,也可用流程图):④源代码:(.c的文件)⑤用户屏幕(即程序运行时出现在机器上的画面):2.对c文件的要求:程序应具有以下特点:a可读性:有注释。
b交互性:有输入提示。
c结构化程序设计风格:分层缩进、隔行书写。
3.上交时间:12月26日下午1点-6点,工程设计中心三楼教学组。
请注意:过时不候哟!四、实验报告内容0.顺序表的插入。
1.顺序表的删除。
2.带头结点的单链表的\'插入。
3.带头结点的单链表的删除。
注意:1.每个人只需在实验报告中完成上述4个项目中的一个,具体安排为:将自己的序号对4求余,得到的数即为应完成的项目的序号。
例如:序号为85的同学,85%4=1,即在实验报告中应完成顺序表的删除。
2.实验报告中的源代码应是通过编译链接即可运行的。
3.提交到个人空间中的内容应是上机实验中的全部内容。
上机实验报告篇2一、《软件技术基础》上机实验内容1.顺序表的建立、插入、删除。
2.带头结点的单链表的建立(用尾插法)、插入、删除。
二、提交到个人10m硬盘空间的内容及截止时间1.分别建立二个文件夹,取名为顺序表和单链表。
2.在这二个文件夹中,分别存放上述二个实验的相关文件。
每个文件夹中应有三个文件(.c文件、.obj文件和.exe文件)。
3. 截止时间:12月28日(18周周日)晚上关机时为止,届时服务器将关闭。
三、实验报告要求及上交时间(用a4纸打印)1.格式:《计算机软件技术基础》上机实验报告用户名se××××学号姓名学院①实验名称:②实验目的:③算法描述(可用文字描述,也可用流程图):④源代码:(.c的文件)⑤用户屏幕(即程序运行时出现在机器上的画面):2.对c文件的要求:程序应具有以下特点:a 可读性:有注释。
b 交互性:有输入提示。
顺序结构程序设计-C语言程序实验报告
安徽工程大学高级语言程序设计实验报告班级姓名同组者/ 成绩日期2019.09.30 指导教师实验名称顺序结构程序设计一、实验目的1.掌握数据的输入/输出方法,能正确使用有关格式转换符。
2.掌握顺序结构程序中语句的执行过程。
3.掌握顺序结构程序的设计方法。
二、实验内容1.P47页第一个程序的作用是依次输入2个整数,计算并输出这2个整数之差。
(1)分析程序,若运行时输出:200,160<回车>,预期结果是多少?(2)上机运行该程序,查看程序运行结果是否符合题目要求。
如果不符合,请分析原因并修改程序,直至符合要求为止。
2.P47页第二个程序用于实现按下列公式计算并输出s1和s2的值:s1=3/(a+b)2,s2=ab/(a+b)3,其中a,b为整型数据。
(1)根据题意修改上述程序,并进行调试,直到正确为止。
(2)在(1)的基础上,将“scanf("%d,%d",&a,&b);”改为“scanf("%d%d",&a,&b);”后再编译、连接、运行。
3.分析P47页第三个程序,写出预期结果,然后输入调试,查看运行结果与预期结果是否一致,并分析其原因。
4.编程实现下列功能并上机调试运行。
(1)设圆半径为r,求圆周长和面积。
要求用scanf函数输入数据,输出时取小数点后两位。
(2)输入一个3位十进制整数,分别输出百位、十位以及个位上的数。
(3)从键盘输入一个带两位小数的实数,将其整数部分和小数部分分离后输出。
(4)用getchar函数读入两个字符,然后分别用putchar和printf函数输出这两个字符。
*思考题:5. 若实验内容1的程序改为P48页第一个程序段,运行该程序,输入5,3,查看程序运行结果是否与自己预测的结果一致,并分析原因。
6.若实验内容1的程序改为P48页第二个程序段,运行该程序,输入5,3,查看程序运行结果是否与自己预测的结果一致,并分析原因。
空间后方交会程序设计
单片空间后方交会程序设计实验报告专业:测绘工程班级:081姓名:张发伟学号:09[一]、实习任务:用C或VC++语言实现单片后方交汇的计算。
[二]、实习目的:1.深入理解单片空间后方交会的原理;2.在有多余观测情况下,用最小二乘平差方法编程实现解求影像外方位元素的过程;3.通过上机调试程序加强动手能力的培养。
[三]、实习原理:以单幅影象为基础,从该影象所覆盖地面范围内若干控制点的已知地面坐标和相应点的像坐标量测值出发,根据共线条件方程,求解该影象在航空摄影时刻的像片外方位元素Xs,Ys,Zs,ф,ω,κ.共线条件方程如下:x-x0=-f*[a1(X-Xs)+b1(Y-Ys)+c1(Z-Zs)]/[a3(X-Xs)+b3(Y-Ys)+c3(Z-Zs)] y-y0=-f*[a2(X-Xs)+b2(Y-Ys)+c2(Z-Zs)]/[a3(X-Xs)+b3(Y-Ys)+c3(Z-Zs)]x,y为像点的像平面坐标;x0,y0,f为影像的外方位元素;Xs,Ys,Zs为摄站点的物方空间坐标;X,Y,Z为物方点的物方空间坐标;[四]、程序框图:输入原始数据归算像点坐标x,,y计算和确定初值X s 0, Y s 0, Z s 0, φ0,ω0,κ0组成旋转矩阵R计算(x ),(y )和l x ,l y逐点组成误差方程并法化所有点完否? 解法方程,求未知数改正数 计算改正后外方位元素未知数改正数<限差否?整理并输出计算结果正常输出迭代次数小于限差否? 输出中间结果和出错信息非正常结束[五]、实验数据:4个地面控制点的地面坐标及其对应像点的像片坐标:[六]、结果输出:已知条件:像点坐标x,y:-53.4 82.21-14.78 -76.6310.46 64.43153.24 -86.15地点坐标Xa,Ya,Za:37631.1 31324.5 728.6939101 24935 2386.540426.5 30319.8 757.31-68.99 36589.4 25273.3摄影比例尺:1:50000内方位元素:x0=y0=0 f=153.24mm计算结果:旋转矩阵:0.997709 0.0675334 0.00398399-0.0675254 0.997715 -0.00211178-0.0041175 0.00183792 0.99999像点坐标位:(单位:mm)-86.15 -68.99-53.41 82.21-14.78 -76.6310.47 64.43外方位元素:Xs=39795.435 精度为:1.1254813Ys=27476.479 精度为:1.2437625Zs=7572.6929 精度为:0.48380521q=-0.0039840098 精度为:0.00018182003w=0.0021117837 精度为:0.00015959235k=-0.067576934 精度为:7.2440432e-005迭代次数:4Press any key to continue[七]、实习总结:掌握运用程序设计实现单片后方交汇的计算,了解在多余观测情况下,用最小二乘平差方法计算相片外方位元素,及其相关精度。
实验报告 实验报告总结万能(优秀7篇)

实验报告实验报告总结万能(优秀7篇)(经典版)编制人:__________________审核人:__________________审批人:__________________编制单位:__________________编制时间:____年____月____日序言下载提示:该文档是本店铺精心编制而成的,希望大家下载后,能够帮助大家解决实际问题。
文档下载后可定制修改,请根据实际需要进行调整和使用,谢谢!并且,本店铺为大家提供各种类型的经典范文,如工作总结、计划大全、策划方案、报告大全、心得体会、演讲致辞、条据文书、作文大全、教案资料、其他范文等等,想了解不同范文格式和写法,敬请关注!Download tips: This document is carefully compiled by this editor. I hope that after you download it, it can help you solve practical problems. The document can be customized and modified after downloading, please adjust and use it according to actual needs, thank you!Moreover, this store provides various types of classic sample essays for everyone, such as work summaries, plan summaries, planning plans, report summaries, insights, speeches, written documents, essay summaries, lesson plan materials, and other sample essays. If you want to learn about different formats and writing methods of sample essays, please stay tuned!实验报告实验报告总结万能(优秀7篇)总结就是对一个时期的学习、工作或其完成情况进行一次全面系统的回顾和分析的书面材料,它能使我们及时找出错误并改正,因此好好准备一份总结吧。
程序设计基础实验报告

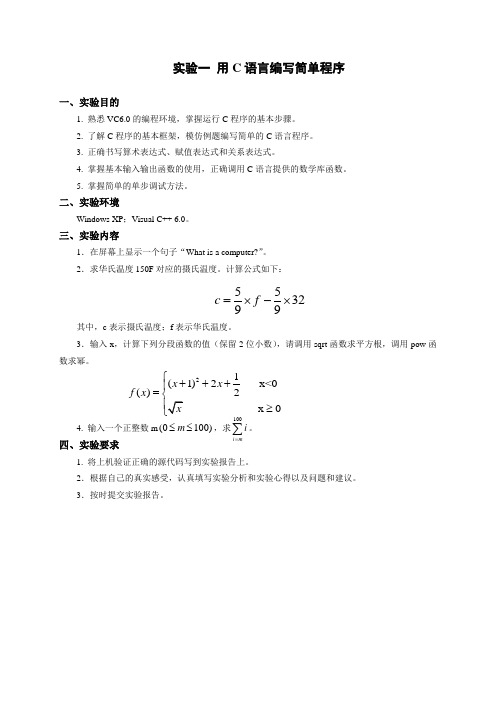
实验一 用C 语言编写简单程序一、实验目的1. 熟悉VC6.0的编程环境,掌握运行C 程序的基本步骤。
2. 了解C 程序的基本框架,模仿例题编写简单的C 语言程序。
3. 正确书写算术表达式、赋值表达式和关系表达式。
4. 掌握基本输入输出函数的使用,正确调用C 语言提供的数学库函数。
5. 掌握简单的单步调试方法。
二、实验环境Windows XP ;Visual C++ 6.0。
三、实验内容1.在屏幕上显示一个句子“What is a computer?”。
2.求华氏温度150F 对应的摄氏温度。
计算公式如下:其中,c 表示摄氏温度;f 表示华氏温度。
3.输入x ,计算下列分段函数的值(保留2位小数),请调用sqrt 函数求平方根,调用pow 函数求幂。
4. 输入一个正整数m (0100)m ≤≤,求100i m i =∑。
四、实验要求1. 将上机验证正确的源代码写到实验报告上。
2.根据自己的真实感受,认真填写实验分析和实验心得以及问题和建议。
3.按时提交实验报告。
553299c f =⨯-⨯21(1)2 x<02()0x x f x ⎧+++⎪=≥一、实验目的1.熟练掌握关系表达式的使用。
2.熟练掌握使用else-if 语句实现多分支结构程序设计。
二、实验环境Windows XP ;Visual C++ 6.0。
三、实验内容1.输入x ,计算并输出下列分段函数sign(x)的值。
2.输入月薪salary ,输出应交的个人所得税tax (保留2位小数)。
按照2011年开始实行的新的个人所得税法,计算公式为:tax = rate*(salary-3500)-deduction 。
当salary≤3500时,rate=0、deduction=0当3500<salary≤5000时,rate=3%、deduction=0当5000<salary≤8000时,rate=10%、deduction=105当8000<salary≤12500时,rate=20%、deduction=555当12500<salary≤38500时,rate=25%、deduction=1005当38500<salary≤58500时,rate=30%、deduction=2775当83500<salary 时,rate=45%、deduction=135053.输入一个正整数n ,再输入n 个学生的百分制成绩,统计各等级成绩的个数。
原版Javascript程序设计实验报告
20—20学年第学期
Javascript程序设计实验
报告
系别:
专业:
班级:
姓名:
学号:
指导教师:
教务处制
实验项目:javascript基础实验
实验要求
1.请认真阅读下面的项目描述。
2.按照课程要求,每个班级分成若干个项目小组,每组人数大约2~3名同学,每个小组选出一名负责的同学。
请负责同学做好小组内分工。
项目描述
1.实验项目是围绕javascript综合实验平台展开,涉及到平台的外围设备。
2.要求熟练掌握javascript编程的基本流程。
3.要求熟练使用javascript编程软件平台。
4.项目实验内容由简单到复杂,采用循环渐进的引导方式,使学生在轻松的氛围中掌握javascript开发及软件的使用。
实验一Javascript基本页面操作
实验二Javascript基本功能控件练习
实验三文本框与函数参数传递练习
实验四HTML页面交互设计练习
实验五Javascript中text控件的设计练习
实验六Javascript中函数的简单应用
实验七Javascript控件交互设计
实验八新函数的学习与应用训练
实验九div与text的显示应用练习
实验十Javascript程序修改练习
实验十一Javascript中的函数应用练习
实验十二数字计算程序设计练习
实验十三数组程序设计练习
实验十四Javascript综合应用练习
实验十五选择结构程序设计练习
实验十六Javascript控件综合应用练习
实验十七循环结构程序设计练习
实验十八for结构程序设计练习。
java_实验四
武汉工程大学计算机科学与工程学院实验报告[4]一、实验目的1)了解Java.awt包及Swing的新增特性。
2)了解Java系统图形用户界面的基本工作原理和界面设计的步骤。
3)了解图形用户界面的事件响应机制。
4)了解图形用户界面各种常用的基本组件的使用方法及其事件响应。
5)掌握Java常用组件的应用6)掌握图形用户界面各种布局策略的设计与使用二、实验要求1)创建一个简单的图形用户界面。
2)使用Java类库中提供的组件,并添加到图形用户界面中。
3)通过Java事件处理机制,实现与用户的交互信息。
4)练习使用布局管理器5)使用Java类库中提供的组件,并添加到图形用户界面中6)通过Java事件处理机制,实现与用户的交互信息三、实验内容对一个优秀的应用程序来说,良好的图形用户界面是必不可少的。
因为只有通过图形界面,用户才能够与程序友好的交互。
缺少良好的图形用户界面,将会给用户理解和应用程序带来很多不便。
创建一个完整的图形用户界面的应用程序大致流程如下:1)引用需要的包和类。
2)设置一个顶层的容器。
3)根据需要为容器设置布局管理器或使用默认布局管理器。
4)将组件添加到容器内,位置自行设计。
5)为响应事件的组件编写事件处理代码。
下面我们先建立一个简单的图形用户界面,然后通过合适的布局管理器,将各种常用组件添加到图形用户界面中,实现与用户的交互信息。
1. 创建简单的图形用户界面(1)创建简单的 Frame 框架在 AWT 库中,对应于框架的类是 Frame,在 Swing 库中,相应的类是 JFrame。
JFrame 类扩展了 Frame 类。
大部分 ATWT 组件在 Swing 中都有等价的组件,它们在表示形式上差一个“J”。
框架是一个容器,可以在这个容器中放入其他一些图形用户界面组件,如按钮、菜单等,从而组成一个功能完善的程序。
下面的例子是建立一个 Frame 框架,通过这个例子学习如何创建一个简单的图形用户界面。
《Java程序设计》课程实验指导书2

《Java程序设计》课程实验指导书2《Java程序设计》课程实验指导书合肥学院计算机系实验⼀ Java开发环境的安装与配置,熟悉Java程序结构⼀、实验⽬的:1. 掌握JDK的安装步骤。
2. 理解环境变量PATH, CLASSPATH的作⽤,以及它们的设置⽅法。
3. 熟悉Editplus(或TextPad,JCreator)编辑环境,编写简单的Application程序和Applet程序,并编译和执⾏。
⼆、实验内容:熟悉JDK的安装和配置,学习如何编写并运⾏简单的Application程序和Applet程序(能输出⼀条简单的问候信息);三、实验要求:1. 能正确地安装JDK2. 熟悉环境变量PATH, CLASSPATH设置⽅法,熟悉编辑环境3. 调试程序、编译,运⾏后得到正确的结果4. 写出实验报告,要求记录编译和执⾏Java程序当中的系统错误信息提⽰,并给出解决办法。
四、实验步骤:1.从/doc/9ac8d1619b6648d7c1c74618.html 上下载最新版本的JDK,并安装。
2.设置环境变量PATH, CLASSPATH, 使得Java程序能正确编译和执⾏。
3.在Editplus(或JCreator ,Textpad)环境下编写⼀个HelloWorld.jav a程序,(1)在主⽅法static public void main(String[ ] args)中调⽤System.out.println()⽅法,使程序输出⼀条问候信息;(2) 编译运⾏程序,观察运⾏情况和输出结果。
(使⽤JDK环境,调⽤javac.exe和java.exe编译和执⾏程序)4.在Editplus(或JCreator ,Textpad)环境下编写⼀个HelloWorldApplet.java程序。
(1)在public void paint(Graphics g)⽅法中调⽤g.drawString()⽅法,使程序输出⼀条问候信息;(2) 编译运⾏程序,观察运⾏情况和输出结果。
vb程序设计实验心得(优秀模板3篇)

vb程序设计实验心得(优秀模板3篇)vb程序设计实验心得第1篇数据库课程设计大赛的尘嚣渐渐远去,怀着对这次大赛的些许不舍,怀着对当初课程设计开始时候的豪情万丈的决心的留恋,怀着通过这次课程设计积累的信心与斗志,我开始写这篇文章,为自己的足迹留下哪怕是微不足道但是对自己弥足珍贵的痕迹并期望与大家共勉。
首先,让我的记忆追溯到大二暑假,在老大的指引下,我接触到Microsoft 公司的.NET产品。
那个时候我已经学过vc和asp,因为windows程序设计实验的课的关系,接触过vb,但是没有专门去学他,因为习惯了c++里面的class,int,觉得vb的sub,var 看着就不是很顺心。
我是一个好奇心很强的人,突然看到了一个号称“.网络是用于创建下一代应用程序的理想而又现实的开发工具”,而且主推c#语言,由于对c语言的一贯好感,我几乎是立刻对他产生了兴趣。
我就开始了对c#的学习,任何语言都不是孤立存在的,所以数据交互是很重要的,暑假的时候我把我们这学期的课本数据库系统概论看了一遍。
我记得以前用c语言编程的时候,数据是在内存中申请空间,譬如使用数组等等。
很耗费内存空间。
这个时候就是数据库站出来的时候啦,于是我又装上了sql server,以前学asp的时候用的是access,那个时候只是照着人家做,理论是什么也不是很清楚。
通过一个暑假的学习,基本搞清楚了理论方面的东西,具体怎么用也不是很清楚。
但是这为这学期的课程设计打下了铺垫。
来到学校后,随着这学期的数据库课程大赛开始了,我有一个看法就是我自己应该具备的能力不是我会多少,而是我应该具备快速学会东西的能力。
遇到什么就学什么。
我们有时候很容易被一些专业名词说吓着,包括什么建模,软件工程,数据分析,数据挖掘等等。
我身边就有很多同学被这些纸老虎所唬住,而没有勇气去接触他们,总是说这个太难了之类的退堂鼓的话,他们低估了自己的潜力同时也压抑住了他们自己的好奇心。
其实都是纸老虎,又不是什么国家科研难题,只是去用一些工具,发明工具是很难,但是用一个工具就容易多了,just do it!我记得我做这个数据库之前,我们老师说要做好前期分析,我就在网上搜索用什么分析工具好。
前方交会实验报告(含VB程序代码)
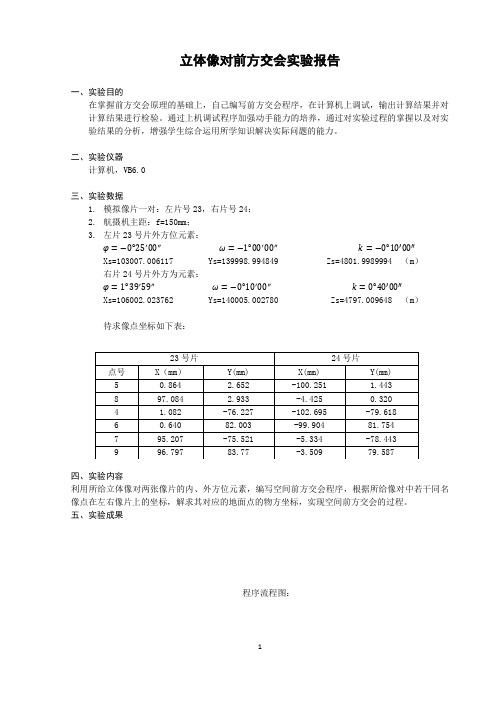
立体像对前方交会实验报告一、实验目的在掌握前方交会原理的基础上,自己编写前方交会程序,在计算机上调试,输出计算结果并对计算结果进行检验。
通过上机调试程序加强动手能力的培养,通过对实验过程的掌握以及对实验结果的分析,增强学生综合运用所学知识解决实际问题的能力。
二、实验仪器计算机,VB6.0三、实验数据1.模拟像片一对:左片号23,右片号24;2.航摄机主距:f=150mm;3.左片23号片外方位元素:φ=−0°25′00″ω=−1°00′00″k=−0°10′00″Xs=103007.006117 Ys=139998.994849 Zs=4801.9989994 (m)右片24号片外方为元素:φ=1°39′59″ω=−0°10′00″k=0°40′00″Xs=106002.023762 Ys=140005.002780 Zs=4797.009648 (m)待求像点坐标如下表:四、实验内容利用所给立体像对两张像片的内、外方位元素,编写空间前方交会程序,根据所给像对中若干同名像点在左右像片上的坐标,解求其对应的地面点的物方坐标,实现空间前方交会的过程。
五、实验成果程序流程图:程序设计界面:程序运行界面:运行结果:(注:表上显示地面点坐标依次是:7,9,4,6,5,8)附:excel进行角度转换:六、程序如下:Dim f#, x1#, y1#, x2#, y2#, i%, j%, u1#, u2#, v1#, v2#, w1#, w2#, fai1#, kab1#, omg1#, fai2#, kab2#, omg2# Dim a12#, a13#, b11#, b12#, b13#, c11#, c12#, c13#, a21#, a22#, a23#, b21#, b22#, b23#, c21#, c22#, c23# Dim n1#, n2#, bu#, bv#, bw#Dim xs1#, xs2#, ys1#, ys2#, zs1#, zs2#Private Sub Command1_Click()fai1 = Val(Text1.Text): kab1 = Val(Text3.Text): omg1 = Val(Text2.Text)fai2 = Val(Text11.Text): kab2 = Val(Text10.Text): omg2 = Val(Text7.Text)f = Val(Text13.Text)xs1 = Val(Text4.Text): xs2 = Val(Text9.Text): ys1 = Val(Text5.Text): ys2 = Val(Text8.Text): zs1 = Val(Text6.Text): zs2 = Val(Text12.Text)End SubPrivate Sub Command3_Click()x1 = Val(InputBox("输入23片坐标x的值"))y1 = Val(InputBox("输入23片坐标y的值"))x2 = Val(InputBox("输入24片坐标x的值"))y2 = Val(InputBox("输入24片坐标y的值"))End SubPrivate Sub Command2_Click()Text1.Visible = FalseText2.Visible = FalseText3.Visible = FalseText4.Visible = FalseText5.Visible = FalseText6.Visible = FalseText7.Visible = FalseText8.Visible = FalseText9.Visible = FalseText10.Visible = FalseText11.Visible = FalseText12.Visible = FalseText13.Visible = FalseLabel1.Visible = FalseLabel2.Visible = FalseLabel3.Visible = FalseLabel4.Visible = FalseLabel5.Visible = FalseLabel6.Visible = FalseLabel7.Visible = FalseLabel8.Visible = FalseLabel9.Visible = FalseLabel10.Visible = FalseLabel11.Visible = FalseLabel12.Visible = FalseLabel13.Visible = FalseLabel14.Visible = Falsea11 = Cos(fai1) * Cos(kab1) - Sin(fai1) * Sin(omg1) * Sin(kab1)a12 = -Cos(fai1) * Sin(kab1) - Sin(fai1) * Sin(omg1) * Cos(kab1)a13 = -Sin(fai1) * Cos(omg1)b11 = Cos(omg1) * Sin(kab1)b12 = Cos(omg1) * Cos(kab1)b13 = -Sin(omg1)c11 = Sin(fai1) * Cos(kab1) + Cos(fai1) * Sin(omg1) * Sin(kab1)c12 = -Sin(fai1) * Sin(kab1) + Cos(fai1) * Sin(omg1) * Cos(kab1)c13 = Cos(fai1) * Cos(omg1)a21 = Cos(fai2) * Cos(kab2) - Sin(fai2) * Sin(omg2) * Sin(kab2)a22 = -Cos(fai2) * Sin(kab2) - Sin(fai2) * Sin(omg2) * Cos(kab2)a23 = -Sin(fai2) * Cos(omg2)b21 = Cos(omg2) * Sin(kab2)b22 = Cos(omg2) * Cos(kab2)b23 = -Sin(omg2)c21 = Sin(fai2) * Cos(kab2) + Cos(fai2) * Sin(omg2) * Sin(kab2)c22 = -Sin(fai2) * Sin(kab2) + Cos(fai2) * Sin(omg2) * Cos(kab2)c23 = Cos(fai2) * Cos(omg2)u1 = a11 * x1 + a12 * y1 - a13 * fv1 = b11 * x1 + b12 * y1 - b13 * fw1 = c11 * x1 + c12 * y1 - c13 * fu2 = a21 * x2 + a22 * y2 - a23 * fv2 = b21 * x2 + b22 * y2 - b23 * fw2 = c21 * x2 + c22 * y2 - c23 * fbu = xs2 - xs1bv = ys2 - ys1bw = zs2 - zs1n1 = (bu * w2 - bw * u2) / (u1 * w2 - u2 * w1)n2 = (bu * w1 - bw * u1) / (u1 * w2 - u2 * w1)Dim xx#, yy#, yy1#, yy2#, zz#xx = Fix((xs1 + u1 * n1) * 1000 + 0.5) / 1000yy1 = Val(Text5.Text) + v1 * n1yy2 = Val(Text8.Text) + v2 * n2yy = Fix(((yy1 + yy2) / 2) * 1000 + 0.5) / 1000zz = Fix((Val(Text6.Text) + w1 * n1) * 1000 + 0.5) / 1000Form1.Print "地面坐标为:"Form1.Print "xx="; xx, "yy="; yy; "zz="; zzEnd Sub七、实验心得通过本次前方交会实验,熟悉掌握了前方交会原理,并利用计算机程序对其进行了解决,收益颇多!。
程序设计基础实验报告
实验一 用C 语言编写简单程序一、实验目的1. 熟悉VC6.0的编程环境,掌握运行C 程序的基本步骤。
2. 了解C 程序的基本框架,模仿例题编写简单的C 语言程序。
3. 正确书写算术表达式、赋值表达式和关系表达式。
4. 掌握基本输入输出函数的使用,正确调用C 语言提供的数学库函数。
5. 掌握简单的单步调试方法。
二、实验环境Windows XP ;Visual C++ 6.0。
三、实验内容1.在屏幕上显示一个句子“What is a computer?”。
2.求华氏温度150F 对应的摄氏温度。
计算公式如下:其中,c 表示摄氏温度;f 表示华氏温度。
3.输入x ,计算下列分段函数的值(保留2位小数),请调用sqrt 函数求平方根,调用pow 函数求幂。
4. 输入一个正整数m (0100)m ≤≤,求100i m i =∑。
四、实验要求1. 将上机验证正确的源代码写到实验报告上。
2.根据自己的真实感受,认真填写实验分析和实验心得以及问题和建议。
3.按时提交实验报告。
553299c f =⨯-⨯21(1)2 x<02()0x x f x ⎧+++⎪=≥一、实验目的1.熟练掌握关系表达式的使用。
2.熟练掌握使用else-if 语句实现多分支结构程序设计。
二、实验环境Windows XP ;Visual C++ 6.0。
三、实验内容1.输入x ,计算并输出下列分段函数sign(x)的值。
2.输入月薪salary ,输出应交的个人所得税tax (保留2位小数)。
按照2011年开始实行的新的个人所得税法,计算公式为:tax = rate*(salary-3500)-deduction 。
当salary≤3500时,rate=0、deduction=0当3500<salary≤5000时,rate=3%、deduction=0当5000<salary≤8000时,rate=10%、deduction=105当8000<salary≤12500时,rate=20%、deduction=555当12500<salary≤38500时,rate=25%、deduction=1005当38500<salary≤58500时,rate=30%、deduction=2775当83500<salary 时,rate=45%、deduction=135053.输入一个正整数n ,再输入n 个学生的百分制成绩,统计各等级成绩的个数。
c语言课程设计报告书3篇

c语言课程设计报告书3篇c语言课程设计报告书1我们学习它,有助于我们更好的了解计算机,与计算机进行交流,因此,c语言的学习对我们尤其重要。
在这个星期里,我们专业的学生在专业老师的带领下进行了c语言程序实践学习。
在这之前,我们已经对c语言这门课程学习了一个学期,对其有了一定的了解,但是也仅仅是停留在了解的范围,对里面的好多东西还是很陌生,的在运用起来的时候还是感到很棘手,毕竟,万事开头难嘛。
由于时间的关系,我们的这次实践课程老师并没有给我们详细的介绍,只是给我们简单的介绍了几个比较重要的实际操作。
包括了程序模块处理。
简单界面程序。
高级界面程序。
程序的添加修改。
用程序做一元线性回归处理以及用c语言程序来画粒度分布图等这几样比较重要的时间操作。
上机实验是学习程序设计语言必不可少的实践环节,特别是c语言灵活、简洁,更需要通过编程的实践来真正掌握它。
对于程序设计语言的学习目的,可以概括为学习语法规定、掌握程序设计方法、提高程序开发能力,这些都必须通过充分的实际上机操作才能完成。
学习c程序设计语言除了课堂讲授以外,必须保证有不少于课堂讲授学时的上机时间。
因为学时所限,课程不能安排过多的上机实验,所以希望学生有效地利用课程上机实验的机会,尽快掌握用c语言开发程序的能力,为今后的继续学习打下一个良好的基础。
为此,我们结合课堂讲授的内容和进度,安排了12次上机实验。
课程上机实验的目的,不仅仅是验证教材和讲课的内容、检查自己所编的程序是否正确,课程安排的上机实验的目的可以概括为如下几个方面:1、加深对课堂讲授内容的理解课堂上要讲授许多关于c语言的.语法规则,听起来十分枯燥无味,也不容易记住,死记硬背是不可取的。
然而要使用c语言这个工具解决实际问题,又必须掌握它。
通过多次上机练习,对于语法知识有了感性的认识,加深对它的理解,在理解的基础上就会自然而然地掌握c语言的语法规定。
对于一些内容自己认为在课堂上听懂了,但上机实践中会发现原来理解的偏差,这是由于大部分学生是初次接触程序设计,缺乏程序设计的实践所致。
实验报告格式模板【优秀8篇】
实验报告格式模板【优秀8篇】随着社会不断地进步,报告的使用频率呈上升趋势,报告具有语言陈述性的特点。
相信很多朋友都对写报告感到非常苦恼吧,它山之石可以攻玉,下面为您精心整理了8篇《实验报告格式模板》,我们不妨阅读一下,看看是否能有一点抛砖引玉的作用。
实验报告格式篇一课程名称班级图文处理20_编辑出版学任雪飞指导教师学号学生姓名20_-20_学年第一学期实验报告填写说明1、实验项目名称:要用最简练的语言反映实验的内容。
要求与实验教学大纲中相一致。
2.实验类型:一般需说明是演示性、验证型实验还是综合性、设计型实验。
要求与实验教学大纲中相一致。
3.实验目的与要求:目的要明确,要抓住重点,符合实验教学大纲中的要求。
4.实验环境:实验用的软硬件环境(配置)。
5.实验方案设计(思路、步骤和方法等):这是实验报告极其重要的内容。
说明整个实验的设计方案,包括实验前的思考、实验中将采用的步骤和方法等。
对于演示性和验证性实验,要写明依据何种原理、方法进行实验,要写明需要经过哪几个步骤来实现其操作。
对于设计型性和综合性实验,在上述内容基础上还应该写出设计思路和设计方法。
6.实验过程(实验中涉及的记录、数据、分析):写明实验方案具体实施的过程,包括实验过程中的记录、数据和相应的分析。
7.实验小结:对本次实验的心得体会、思考和建议。
8.实验成绩:实验成绩为百分制。
注意:实验报告请双面打印,切勿改动格式;实验报告内容必须手写,不得抄袭;实验报告将记入实验成绩;每次实验开始时,交上一次的实验报告,否则将扣除此次实验成绩。
实验项目名称:调色实验类型:设计型实验日期:20_年10月周一3,4,;周四7,8节实验室地点:教育技术楼C303实验室名称:平面媒体实验室实验概述【实验目的及要求】目的:学会调色要求:给自己的数码相机所照的像片进行调色修饰【实验环境】(使用的硬件和软件)硬件:MPC软件:Photoshop实验内容【实验方案设计】实验内容【实验过程】(实验步骤、记录、数据、分析)【实验小结】实验成绩成绩评定:教师评语:实验项目名称:路径使用实验类型:设计型实验日期:20_年11月周一3,4,;周四7,8节实验室地点:教育技术楼C303实验室名称:平面媒体实验室实验概述【实验目的及要求】目的:1.学会使用自定义画笔2、学会使用路径描边要求:使用路径绘制一幅手绘图【实验环境】(使用的硬件和软件)硬件:MPC软件:Photoshop 实验内容【实验方案设计】实验内容【实验过程】(实验步骤、记录、数据、分析)【实验小结】实验成绩成绩评定:教师评语:实验项目名称:蒙版合成实验类型:设计型实验日期:20_年12月周一3,4,;周四7,8节实验室地点:教育技术楼C303实验室名称:平面媒体实验室实验概述【实验目的及要求】目的:1.学会使用抽出滤镜2、学会使用历史记录画笔、图层蒙版工具要求:使用蒙版合成一幅图或者参考样例:使用抽出滤镜和蒙版扣图【实验环境】(使用的硬件和软件)硬件:MPC软件:Photoshop等软件实验内容【实验方案设计】实验内容【实验过程】(实验步骤、记录、数据、分析)【实验小结】实验成绩成绩评定:教师评语:实验项目名称:合成图像实验类型:设计型实验日期:20_年12月27日实验室地点:教育技术楼C303实验室名称:平面媒体实验室实验概述【实验目的及要求】目的:学会利用Photoshop合成图像要求:自找素材合成一幅图【实验环境】(使用的硬件和软件)硬件:MPC软件:Photoshop 等软件实验内容【实验方案设计】实验内容【实验过程】(实验步骤、记录、数据、分析)【实验小结】实验成绩成绩评定:教师评语:实验报告格式篇二实验名称要用最简练的语言反映实验的内容。
《-C语言程序设计》实验指导书

《C语言程序设计》实验指导书课程编号:课程名称:C语言程序设计•实验学时:44一、本实验课的性质、任务与tl的本实验课目的是使学生掌握C语言编程的常用方法,熟悉该语言中的语法、词法规则,为以后进行软件开发和学习后继专业课程打下基础。
通过学习能够运用c语言中的各个知识点编写能完成一定功能的程序。
训练学生进行复杂程序设计的技能和培养良好程序设计的习惯,其重要程度决不亚于知识的传授。
把高级语言的学习与程序设计.上机实践紧密地结合起来,以提高学生能灵活运用新的知识分析问题和解决问题的能力。
二、本实验课所依据的课程基本理论本实验课基于C语言的语法和词法规则、数据的表示及算法的处理,而语法及算法正是高级语言程序设计的主要研究对象。
《C语言程序设计》的主要任务是:C语言是一种应用广泛结构化程序设计语言,本课程介绍c语言的基本概念.基本语法和编程方法,重点描述C语言的结构化的特征,并通过本课程的学习,使学生掌握一定的结构化程序设计的知识,以及用C语言编写程序的能力。
三、实验类型与要求在做每个实验之前,让学生对本次实验相关的内容进行预习、算法设计、流程图的设计、编写程序,做好实验的准备工作;写出预习报告,画出流程图, 要求独立完成。
说明:1>实验类型:设计性;2、实验要求:必做。
四、每组人数与实验学时数每组1人,实验学时数44学时。
五、考核方式与评分办法实验总成绩二出勤情况"0%+实验报告*20%+平时*30%+实验表现*40%六、本实验课配套教材或实验指导书谭浩强.C程序设计.北京:清华大学出版社,2006年3月第3版谭浩强.C程序设计题解与上机指导.北京:清华大学出版社,2006年3月第3版谭浩强.C程序设计试题汇编.北京:清华大学出版社,2006年3月第2版夏宽理.C语言程序设计.北京:中国铁道出版社,2006年2月第1版夏宽理.C语言程序设计上机指导与习题解答.北京:中国铁道出版社,2006年2月第1 版王士元・C高级实用程序设计.北京:清华大学出版社,1996年1月第1版七、实验报告要求在机器上交作业,每次实验成绩分为优、良、及格、不及格,未参加的为0分。
单向后方交会实验报告
实验报告班级:测绘一班学号:日期:目录一、计算原理 (3)二、算法流程 (4)三、源程序 (5)四、计算结果 (13)五、结果分析 (13)六、心得体会 (13)一、计算原理已知条件摄影机主距f=,x0=,y0=, 像片比例尺为1:40000,有四对点的像点坐标与相应的地面坐标如下表。
以单像空间后方交会方法,求解该像片的外方位元素。
二、算法流程(1)获取已知数据。
从航摄资料中差取平均航高与摄影机主距;获取控制点的地面测量坐标并转换为地面摄影坐标。
(2)量测控制点的像点坐标并作系统误差改正。
(3)确定未知数的初始值。
在竖直摄影且地面控制点大体对称分布的情况下,按如下方法确定初始值,即nX XS∑=0,nY YS∑=,∑+=Z nmf Z S10000===κωϕ(4)用三个角元素的初始值按下式,计算各个方向余弦值,组成旋转矩阵Rωϕκωϕκϕκωϕκϕωκωκωωϕκωϕκϕκωϕκϕcos cos cos sin cos sin sin sin sin cos cos sin sin cos cos sin cos cos sin cos sin sin sin cos sin sin sin cos cos 321321321=+-=+=-===-=--=-=c c c b b b a a a(5)逐点计算像点坐标的近似值。
利用未知数的近似值和控制点的地面坐标;带入共线方程式,逐点近似像点坐标的近似值(x )、(y )。
(6)逐点计算误差方程式的系数和常数项,组成误差方程式。
(7)计算法方程的系数矩阵A A T 和常数项L A L ,组成法方程式。
(8) 解法方程,求得外方位元素的改正数κωϕd d d d d d 、、、、、S S S Z Y X 。
(9)用前次迭代取得的近似值,加本次迭代的改正数,计算外方位元素的新值。
KS K S K S K S K S K S K S K S K S dZ Z Z dY Y Y dX X X +=+=+=---111,,K K K K K K K K K d d d κκκωωωϕϕϕ+=+=+=---111,,(10)将求得的外方位元素改正数与规定的限差比较,若小于限差,则迭代结束。
现代交换原理实验报告

课程名称:现代交换原理实验实验一:交换系统组成与结构一.实验目的:全面了解交换系统组成与结构及实验操作方法二.实验要求:1.从总体上初步熟悉两部单机用空分交换方式进行通话。
2.初步建立程控交换实验系统及交换,中继通信的概念。
三:实验仪器设备和材料清单:程控交换实验箱,双踪示波器。
四:实验方法与步骤:1.打开交流电源开关,电源输出电路加电,电源发光指示二极管亮。
2.按一下薄膜输入开关“复位”键,进行显示菜单状态。
3.熟悉菜单主要工作状态,分“人工交换”,“空分交换”,“数字时分交换”三种工作方式。
4.以“”方式为例,对“”与“”正常呼叫,熟悉信令程控交换与语音信号通信交换全过程。
5.呼叫时,甲方一路设置为48,乙方一路设置为68,甲方二路设置为49,乙方二路设置为69.五:实验报告要求:总结交换系统基本工作原理。
程控交换机实质上是采用计算机进行“存储程序控制”的交换机,它将各种控制功能与方法编成程序,存入存储器,利用对外部状态的扫描数据和存储程序来控制,管理整个交换系统的工作。
六:思考题:程控交换系统由哪些部分组成?1)数字交换网络。
2)接口。
3)信令设备。
4)控制系统。
实验二:用户接口模块实验一:实验目的:1.全面了解用户线接口电路功能(BORST)的作用及其实现方法。
2.通过对用户模块电路PBL 387 10电路的学习与实验,进一步加深对BORST功能的理解。
二:实验要求:1.了解用户模块PBL 387 10的主要性能与特点。
2.熟悉用PBL 387 10组成的用户线接口电路。
三:实验仪器设备和材料清单:程控交换实验箱,双综示波器。
四:实验方法与步骤:用示波器分别观测TP301,TP302,TP303在摘挂机时的工作电平,给出在各种状态下的工作波形。
五:实验报告要求:1.总结基本工作原理2.给出在各种工作状态下的TP301,TP302,TP303信号波形图,标注关键数据。
(见手写报告纸)六:思考题:1.用户接口模块功能应完成哪些功能?(1)馈电:向用户话机送直流电流;(2)过压保护:防止过压过流冲击和损坏电路设备;(3)振铃控制:向用户话机馈送铃流;(4)监视:监视用户线状态,检测话机摘机、挂机与拨号脉冲信号;(5)编码解码与滤波;(6)混合;(7)测试:对用户电路进行测试2.判断用户摘挂机的方法是什么?1)用户摘机时,用户状态检测输出端输出高电平,向CPU表示用户“忙”;2)用户挂机时,用户状态检测输出端输出低电平,向CPU表示用户“闲”;3)用户挂机时,用户状态检测输出端输出低电平,向CPU表示用户“闲”;3.交换机的振铃功能是如何实现的?振铃电路可由外部的振铃继电器和用户电路部的继电器驱动电路以及铃流电源向用户馈送铃流:当继电器控制端(RC 端) 输入高电平,继电器驱动输出端(RD 端) 输出高电平,继电器接通,此时铃流源通过与振铃继电器连接的15 端(RV 端) 经TIP -RING 端口向被叫用户馈送铃流。
交互式实验报告
实验一机器人认识实验一、实验目的:1.认识能力风暴机器人的基本结构。
2.学会能力风暴机器人的连接、检测和程序下载等操作。
二、实验要求:1.可以明确能力风暴机器人的各个组成部分。
2.指出主要组成部分的结构和功能。
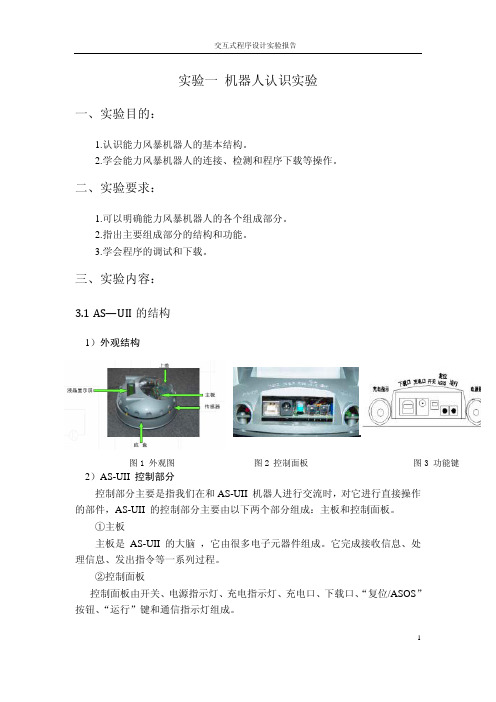
3.学会程序的调试和下载。
三、实验内容:3.1 AS—UII的结构(1)外观结构(2)控制部分主要是指我们在和AS-UII 机器人进行交流时,对它进行直接操作的部件,AS-UII 的控制部分主要由以下两个部分组成:主板和控制面板。
①主板主板是AS-UII 的大脑,它由很多电子元器件组成。
它完成接收信息、处理信息、发出指令等一系列过程。
②控制面板控制面板由开关、电源指示灯、充电指示灯、充电口、下载口、“复位/ASOS”按钮、“运行”键和通信指示灯组成。
(3)感官部分--传感器感官部分是AS-UII 机器人采集环境信息的一组传感器。
用到的传感器有以下5 种:碰撞传感器,红外传感器,光敏传感器,话筒,光电编码器。
在JC 语言中,碰撞传感器的库函数是bumper(),在程序运行过程中此库函数仅在被调用到时执行一次,即采集数据一次。
因此要连续查询碰撞传感器的状态就要在JC 代码编辑界面中间一行编辑框(JC 对话窗口)中输入如下程序块(while(1)表示永远循环):void main(){ int bump;while(1) {printf("bump=%d\n",bumper());wait(0.1);}}LCD 显示的值为0意为没有碰撞。
八个方向发生碰撞时返回值的意义为:1 左前,2 右前,4 左后,8 右后,3 前,12 后,5 左,10 右。
3.2 红外传感器红外传感器共包含两种器件:红外发射管和红外接收模块。
在JC 语言中,红外传感器的库函数是ir_detector(),void main(){int ir;while(1) {printf("ir=%b\n", ir_detector());wait(0.5);}}用一张白纸分别挡在能力风暴智能机器人的前方、左方和右方,液晶显示屏上显示的ir 的值都不一样,可总结如下:无障碍左方右方前方十进制表示:0 1 2 43.3光敏传感器光敏传感器是一个光敏电阻,它的阻值随光线强弱而变化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
空间后交-前交程序设计(实验报告)姓名:班级:学号:时间:空间后交-前交程序设计一、实验目的用 C 、VB或MATLAB语言编写空间后方交会-空间前方交会程序⑴提交实习报告:程序框图、程序源代码、计算结果、体会⑵计算结果:像点坐标、地面坐标、单位权中误差、外方位元素及其精度二、实验数据f=150.000mm,x0=0,y0=0三、实验思路1.利用空间后方交会求左右像片的外方位元素(1).获取m(于像片中选取两点,于地面摄影测量坐标系中选取同点,分别计算距离,距离比值即为m),x,y,f,X,Y,Z(2).确定未知数初始值Xs,Ys,Zs,q,w,k(3).计算旋转矩阵R(4).逐点计算像点坐标的近似值(x),(y)(5).组成误差方程式(6).组成法方程式(7).解求外方位元素(8).检查是否收敛,即将求得的外方位元素的改正数与规定限差比较,小于限差即终止;否则用新的近似值重复步骤(3)-(7)2.利用求出的外方位元素进行空间前交,求出待定点地面坐标(1).用各自像片的角元素计算出左、右像片的方向余弦值,组成旋转矩阵R1,R2(2).根据左、右像片的外方位元素,计算摄影基线分量Bx,By,Bz(3).计算像点的像空间辅助坐标(X1,Y1,Z1)和(X2,Y2,Z2)(4).计算点投影系数N1和N2(5).计算未知点的地面摄影测量坐标四、实验过程⑴程序框图函数AandL%求间接平差时需要的系数%%%已知%a=像点坐标x,b=像点坐标y,f内方位元素主距%φ=q,ψ=w,κ=k%像空间坐标系X,Y,Z%地面摄影测量坐标系Xs,Ys,Zsfunction [A1,L1,A2,L2]=AandL(a,b,f,q,w,k,X,Y,Z,Xs,Ys,Zs) %%%%%%%%%%%选择矩阵元素a1=cos(q)*cos(k)-sin(q)*sin(w)*sin(k);a2=-cos(q)*sin(k)-sin(q)*sin(w)*cos(k);a3=-sin(q)*cos(w);b1=cos(w)*sin(k);b2=cos(w)*cos(k);b3=-sin(w);c1=sin(q)*cos(k)+cos(q)*sin(w)*sin(k);c2=-sin(q)*sin(k)+cos(q)*sin(w)*cos(k);c3=cos(q)*cos(w);%%%%%%%共线方程的分子分母X_=a1*(X-Xs)+b1*(Y-Ys)+c1*(Z-Zs);Y_=a2*(X-Xs)+b2*(Y-Ys)+c2*(Z-Zs);Z_=a3*(X-Xs)+b3*(Y-Ys)+c3*(Z-Zs);%%%%%%%近似值x=-f*X_/Z_;y=-f*Y_/Z_;%%%%%%%A组成L组成a11=1/Z_*(a1*f+a3*x);a12=1/Z_*(b1*f+b3*x);a13=1/Z_*(c1*f+c3*x);a21=1/Z_*(a2*f+a3*y);a22=1/Z_*(b2*f+b3*y);a23=1/Z_*(c2*f+c3*y);a14=y*sin(w)-(x/f*(x*cos(k)-y*sin(k))+f*cos(k))*cos(w);a15=-f*sin(k)-x/f*(x*sin(k)+y*cos(k)); a16=y;a24=-x*sin(w)-(y/f*(x*cos(k)-y*sin(k))-f*sin(k))*cos(w);a25=-f*cos(k)-y/f*(x*sin(k)+y*cos(k));a26=-x;lx=a-x;ly=b-y;%%%%%%%%%组成一个矩阵,并返回A1=[a11,a12,a13,a14,a15,a16];A2=[a21,a22,a23,a24,a25,a26];L1=lx;L2=ly;函数deg2dms%%%%%%%%角度转度分秒function y=deg2dms(x)a=floor(x);b=floor((x-a)*60);c=(x-a-b/60)*3600;y=a+(b/100)+(c/10000);函数dms2deg%%%%%度分秒转度function y=dms2deg(x)a=floor(x);b=floor((x-a)*100);c=(x-a-b/100)*10000;y=a+b/60+c/3600;函数ok%%%%%%%%%%%%%%目的是为了保证各取的值的有效值%%xy为n*1,a为1*nfunction result=ok(xy,a)format short gi=size(xy,1);for n=1:io=xy(n)-floor(xy(n,1));o=round(o*(10^a(n)))/(10^a(n));xy(n,1)=floor(xy(n,1))+o;endformat long gresult=xy;函数rad2dmsxy%%%%求度分秒表现形式的三个外方位元素,三个角度function xydms=rad2dmsxy(xy)[a,b,c,d,e,f]=testvar(xy);d=deg2dms(rad2deg(d));e=deg2dms(rad2deg(e));f=deg2dms(rad2deg(f));xydms=[a,b,c,d,e,f]';函数spacehoujiao%%%%%%%空间后交%%% f%%输入p(2*n,1)%%像点坐标x,y,X,Y,Z,均为(n,1)function [xy,m,R]=spacehoujiao(p,x,y,f,X,Y,Z)format long;%%%%%权的矢量化,这是等精度时的,如果非,将函数参数改为P P=diag(p);%%求nj=size(X,2);%%初始化Xs=0;Ys=0;Zs=0;for n=1:jXs=Xs+X(n);Ys=Ys+Y(n);Zs=Zs+Z(n);endSx=sqrt((x(2)-x(1))^2+(y(2)-y(1))^2);%%%%两像点之间距离Sd=sqrt((X(2)-X(1))^2+(Y(2)-Y(1))^2);%%%%两地面控制点之间距离m=Sd/Sx; %%%%图像比例系数Xs=Xs/j;Ys=Ys/j;Zs=m*f+Zs/j;m0=0;q=0;w=0;k=0;i=0;a=rand(2*j,6);l=rand(2*j,1);%%%%for n=1:j[a(2*n-1,:),l(2*n-1,1),a(2*n,:),l(2*n,1)]=AandL(x(n),y(n),f,q,w,k,X(n),Y(n),Z(n ),Xs,Ys,Zs);enddet=inv(a'*P*a)*transpose(a)*P*l;%%%%%%%%%循环体while 1%%%%%%%%%%%%%%%%[dXs,dYs,dZs,dq,dw,dk]=testvar(det);detXs=abs(dXs);detYs=abs(dYs);detZs=abs(dZs);detq=abs(dq);detw=abs(dw);detk=abs(dk);%%%%%%%%%if((detXs<0.01)&&(detYs<0.01)&&(detZs<0.01)&&(detq<pi/648000)&&(detw<pi/648000)&& (detk<pi/648000))break;elseV=(a*det-l);Q=inv(a'*P*a);m0=m0+sqrt((V'*P*V)/(2*j-6));%%m0需要每次的改正数算出来相加%%%Xs=Xs+dXs;Ys=Ys+dYs;Zs=Zs+dZs;q=q+dq;w=w+dw;k=k+dk;%%%for n=1:j[a(2*n-1,:),l(2*n-1,1),a(2*n,:),l(2*n,1)]=AandL(x(n),y(n),f,q,w,k,X(n),Y(n),Z(n ),Xs,Ys,Zs);enddet=inv(a'*P*a)*transpose(a)*P*l;i=i+1;%%%%end%%%end[dXs,dYs,dZs,dq,dw,dk]=testvar(det);detXs=abs(dXs);detYs=abs(dYs);detZs=abs(dZs);detq=abs(dq);detw=abs(dw);detk=abs(dk);V=(a*det-l);Q=inv(a'*P*a);m0=m0+sqrt((V'*P*V)/(2*n-6));%%%Xs=Xs+dXs;Ys=Ys+dYs;Zs=Zs+dZs;q=q+dq;w=w+dw;k=k+dk;%%%%%%%%%%%%%可以输出迭代次数的i%%%%%%%%%%%%Xs,Ys,Zs,q,w,k,i,dXs,dYs,dZs,dq,dw,dk,detXs,detYs,detZs %%%%%%%%%%%精度mo=m0*sqrt(Q);m=[mo(1,1),mo(2,2),mo(3,3),mo(4,4),mo(5,5),mo(6,6)]';[mXs,mYs,mZs,mq,mw,mk]=testvar(m);%%%%%%%%%输出xy=[Xs,Ys,Zs,q,w,k]';%%输出(6,1)的外方位元素m=[m0,mXs,mYs,mZs,mq,mw,mk]';%%单位误差,各元素中误差R=xyR(xy);%%旋转矩阵函数spaceqianjiao%%空间前交%输入f%输入x1,y1,x2,y2,R1,R2,xy1,xy2 (n,1)%输出X,Y,Z (n,1)function [X,Y,Z]=spaceqianjiao(x1,y1,x2,y2,f,R1,R2,xy1,xy2) i=size(x1,2);[Xs1,Ys1,Zs1,q1,w1,k1]=testvar(xy1);[Xs2,Ys2,Zs2,q2,w2,k2]=testvar(xy2);for n=1:i[X1(n),Y1(n),Z1(n)]=testvar(R1*[x1(n),y1(n),-f]');[X2(n),Y2(n),Z2(n)]=testvar(R2*[x2(n),y2(n),-f]');Bx=Xs2-Xs1;By=Ys2-Ys1;Bz=Zs2-Zs1;N1=(Bx*Z2(n)-Bz*X2(n))/(X1(n)*Z2(n)-X2(n)*Z1(n));N2=(Bx*Z1(n)-Bz*X1(n))/(X1(n)*Z2(n)-X2(n)*Z1(n));X(n)=Xs1+N1*X1(n);Z(n)=Zs1+N1*Z1(n);Y(n)=0.5*((Ys1+N1*Y1(n))+(Ys2+N2*Y2(n)));end函数testvar%分割矩阵。