数字图像处理第六次作业
数字图像处理课后参考答案
数字图像处理第一章1.1解释术语(2)数字图像:为了便于用计算机对图像进行处理,通过将二维连续(模拟)图像在空间上离散化,也即采样,并同时将二维连续图像的幅值等间隔的划分成多个等级(层次)也即均匀量化,以此来用二维数字阵列并表示其中各个像素的空间位置和每个像素的灰度级数的图像形式称为数字图像。
(3)图像处理:是指对图像信息进行加工以满足人的视觉或应用需求的行为。
1.7 包括图像变化、图像增强、图像恢复、图像压缩编码、图像的特征提取、形态学图像处理方法等。
彩色图像、多光谱图像和高光谱图像的处理技术沿用了前述的基本图像处理技术,也发展除了一些特有的图像处理技术和方法。
1.8基本思路是,或简单地突出图像中感兴趣的特征,或想方法显现图像中那些模糊了的细节,以使图像更清晰地被显示或更适合于人或及其的处理与分析。
1.9基本思路是,从图像退化的数学或概率模型出发,研究改进图像的外观,从而使恢复以后的图像尽可能地反映原始图像的本来面目,从而获得与景物真实面貌相像的图像。
1.10基本思路是,,在不损失图像质量或少损失图像质量的前提下,尽可能的减少图像的存储量,以满足图像存储和实时传输的应用需求。
1.11基本思路是,通过数学方法和图像变换算法对图像的某种变换,以便简化图像进一步处理过程,或在进一步的图像处理中获得更好的处理效果。
1.12基本目的是,找出便于区分和描述一幅图像中背景和目标的方法,以方便图像中感兴趣的目标的提取和描述。
第二章2.1解释下列术语(18)空间分辨率:定义为单位距离内可分辨的最少黑白线对的数目,用于表示图像中可分辨的最小细节,主要取决于采样间隔值的大小。
(19)灰度分辨率:是指在灰度级别中可分辨的最小变化,通常把灰度级数L称为图像的灰度级分辨率。
(20)像素的4邻域:对于图像中位于(x,y)的像素p来说,与其水平相邻和垂直相邻的4个像素称为该像素的4邻域像素,他们的坐标分别为(x-1,y)(x,y-1)(x,y+1)(x+1,y)。
《数字图像处理》习题参考答案
1《数字图像处理》 习题参考答案第1章概述1.1连续图像和数字图像如何相互转换?答:数字图像将图像看成是许多大小相同、形状一致的像素组成。
这样,数字图像可以用二维矩阵表示。
将自然界的图像通过光学系统成像并由电子器件或系统转化为模拟图像 (连续图像)信号,再由模拟 /数字转化器(ADC )得到原始的数字图像信号。
图像的数字化包括离散和量化两个主要步骤。
在空间将连续坐标过程称为离散化,而进一步将图像的幅度值(可能是灰度或色彩)整数化的过程称为量化。
1.2采用数字图像处理有何优点?答:数字图像处理与光学等模拟方式相比具有以下鲜明的特点:1 •具有数字信号处理技术共有的特点。
(1)处理精度高。
(2)重现性能好。
(3)灵活性高。
2•数字图像处理后的图像是供人观察和评价的,也可能作为机器视觉的预处理结果。
3•数字图像处理技术适用面宽。
4 •数字图像处理技术综合性强。
1.3数字图像处理主要包括哪些研究内容?答:图像处理的任务是将客观世界的景象进行获取并转化为数字图像、进行增强、变换、编码、恢复、重建、编码和压缩、分割等处理,它将一幅图像转化为另一幅具有新的意义的 图像。
1.4讨论数字图像处理系统的组成。
列举你熟悉的图像处理系统并分析它们的组成和功能。
答:如图1.8,数字图像处理系统是应用计算机或专用数字设备对图像信息进行处理的 信息系统。
图像处理系统包括图像处理硬件和图像处理软件。
图像处理硬件主要由图像输入设备、图像运算处理设备(微计算机) 、图像存储器、图像输出设备等组成。
软件系统包括操作系统、控制软件及应用软件等。
1.5 常见的数字图像处理开发工具有哪些?各有什么特点?答.目前图像处理系统开发的主流工具为 Visual C++ (面向对象可视化集成工具)和 MATLAB 的图像t+W<住《l 塁希碎«IUIMEH 鼻爭■图1.8数字图像处理系统结构图处理工具箱(Image Processing Tool box )。
数字图像处理每章课后题参考答案
数字图像处理每章课后题参考答案数字图像处理每章课后题参考答案第一章和第二章作业:1.简述数字图像处理的研究内容。
2.什么是图像工程?根据抽象程度和研究方法等的不同,图像工程可分为哪几个层次?每个层次包含哪些研究内容?3.列举并简述常用表色系。
1.简述数字图像处理的研究内容?答:数字图像处理的主要研究内容,根据其主要的处理流程与处理目标大致可以分为图像信息的描述、图像信息的处理、图像信息的分析、图像信息的编码以及图像信息的显示等几个方面,将这几个方面展开,具体有以下的研究方向:1.图像数字化,2.图像增强,3.图像几何变换,4.图像恢复,5.图像重建,6.图像隐藏,7.图像变换,8.图像编码,9.图像识别与理解。
2.什么是图像工程?根据抽象程度和研究方法等的不同,图像工程可分为哪几个层次?每个层次包含哪些研究内容?答:图像工程是一门系统地研究各种图像理论、技术和应用的新的交叉科学。
根据抽象程度、研究方法、操作对象和数据量等的不同,图像工程可分为三个层次:图像处理、图像分析、图像理解。
图像处理着重强调在图像之间进行的变换。
比较狭义的图像处理主要满足对图像进行各种加工以改善图像的视觉效果。
图像处理主要在图像的像素级上进行处理,处理的数据量非常大。
图像分析则主要是对图像中感兴趣的目标进行检测和测量,以获得它们的客观信息从而建立对图像的描述。
图像分析处于中层,分割和特征提取把原来以像素描述的图像转变成比较简洁的非图形式描述。
图像理解的重点是进一步研究图像中各目标的性质和它们之间的相互联系,并得出对图像内容含义的理解以及对原来客观场景的解释,从而指导和规划行为。
图像理解主要描述高层的操作,基本上根据较抽象地描述进行解析、判断、决策,其处理过程与方法与人类的思维推理有许多相似之处。
第三章图像基本概念1.图像量化时,如果量化级比较小时会出现什么现象?为什么?答:当实际场景中存在如天空、白色墙面、人脸等灰度变化比较平缓的区域时,采用比较低的量化级数,则这类图像会在画面上产生伪轮廓(即原始场景中不存在的轮廓)。
数字图像处理第六章作业3
班级:B110301 学号:B11030129 姓名:张新伟
第六章作业要求:
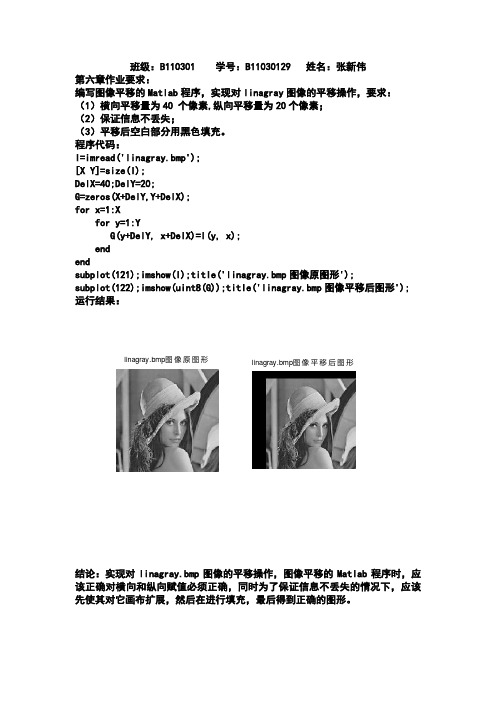
编写图像平移的Matlab 程序,实现对linagray 图像的平移操作,要求:
(1)横向平移量为40 个像素,纵向平移量为20个像素;
(2)保证信息不丢失;
(3)平移后空白部分用黑色填充。
程序代码:
I=imread('linagray.bmp');
[X Y]=size(I);
DelX=40;DelY=20;
G=zeros(X+DelY,Y+DelX);
for x=1:X
for y=1:Y
G(y+DelY, x+DelX)=I(y, x);
end
end
subplot(121);imshow(I);title('linagray.bmp 图像原图形');
subplot(122);imshow(uint8(G));title('linagray.bmp 图像平移后图形'); 运行结果:
linagray.bmp 图像原图
形linagray.bmp 图像平移后图形
结论:实现对linagray.bmp 图像的平移操作,图像平移的Matlab 程序时,应该正确对横向和纵向赋值必须正确,同时为了保证信息不丢失的情况下,应该先使其对它画布扩展,然后在进行填充,最后得到正确的图形。
《数字图像处理》课后作业2016【最新资料】

《数字图像处理》课后作业(2015)第2章2.5一个14mm⨯14mm的CCD摄像机成像芯片有2048⨯2048个像素,将它聚焦到相距0.5m远的一个方形平坦区域。
该摄像机每毫米能分辨多少线对?摄像机配备了一个35mm镜头。
(提示:成像处理模型见教材图2.3,但使用摄像机镜头的焦距替代眼睛的焦距。
)2.10高清电视(HDTV, High Definition TV )使用1080条水平电视线(TV Line)隔行扫描来产生图像(每隔一行在显像管表面画出一条水平线,每两场形成一帧,每场用时1/60秒,此种扫描方式称为1080i,即1080 interlace scan;对应的有1080p,即1080 progressive scan,逐行扫描)。
图像的宽高比是16:9。
水平电视线数(水平行数)决定了图像的垂直分辨率,即一幅图像从上到下由多少条水平线组成;相应的水平分辨率则定义为一幅图像从左到右由多少条垂直线组成,水平分辨率通常正比于图像的宽高比。
一家公司已经设计了一种图像获取系统,该系统由HDTV图像生成数字图像,彩色图像的每个像素都有24比特的灰度分辨率(红、绿、蓝分量各8比特)。
请计算不压缩时存储90分钟的一部HDTV电影所需要的存储容量。
2.22图像相减常用于在产品装配线上检测缺失的元件。
方法是事先存储一幅对应于正确装配的产品图像,称为“金”图像(“golden” image),即模板图像。
然后,在同类型产品的装配过程中,采集每一装配后的产品图像,从中减去上述模板图像。
理想情况下,如果产品装配正确,则两幅图像的差值应为零。
而对于缺失元件的产品,其图像与模板图像在缺失元件区域不同,两幅图像的差值在这些区域就不为零。
在实际应用中,您认为需要满足哪些条件这种方法才可行?第3章3.5在位平面分层中,(a)如果将低阶位平面的一半设为零值,对一幅图像的直方图大体上有何影响?(b)如果将高阶位平面的一半设为零值,对一幅图像的直方图又有何影响?3.6试解释为什么离散直方图均衡化技术一般不能得到平坦的输出直方图。
数字图像处理第三版 (Rafael C.Gonzalez著)第六章答案
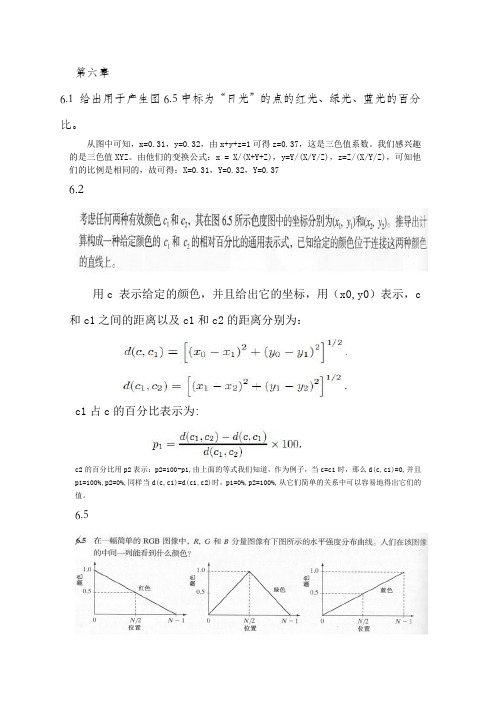
第六章6.1 给出用于产生图6.5中标为“日光”的点的红光、绿光、蓝光的百分比。
从图中可知,x=0.31,y=0.32,由x+y+z=1可得z=0.37,这是三色值系数。
我们感兴趣的是三色值XYZ。
由他们的变换公式:x = X/(X+Y+Z),y=Y/(X/Y/Z),z=Z/(X/Y/Z),可知他们的比例是相同的,故可得:X=0.31,Y=0.32,Y=0.376.2用c 表示给定的颜色,并且给出它的坐标,用(x0,y0)表示,c 和c1之间的距离以及c1和c2的距离分别为:c1占c的百分比表示为:c2的百分比用p2表示:p2=100-p1,由上面的等式我们知道,作为例子,当c=c1时,那么d(c,c1)=0,并且p1=100%,p2=0%,同样当d(c,c1)=d(c1,c2)时,p1=0%,p2=100%,从它们简单的关系中可以容易地得出它们的值。
6.5在中心点有R/2+ B/2+G= R+G+B /2 + G /2=midgray+G/2,由于增加了灰色分量和强度使人们看起来像纯绿色。
6.7 在每幅12比特图像中有4096212=种可能值。
对于灰度色彩,所有的RGB 分量必须相等,所以有4096种不同的灰度。
6.8(a )R 图像中的所有像素值都是255。
在G 图像中,第一列全是0,第二列全是1,最后一列全由255组成。
在B 图像中,第一行全为255,第二行全为254,直到最后一行全为0。
(b )(令坐标轴编号同书中图6.7(RGB 彩色立方体示意图)相同。
)则:(0,0,0)=白色,(1,1,1)=黑色,(1,0,0)=青色,(1,1,0)=蓝色,(1,0,1)=绿色,(0,1,1)=红色,(0,0,1)=黄色,(0,1,0)=深红色。
(c)不包括黑点和白点是饱和的。
在包含黑点或者白点时,饱和度会下降。
6.10 从式(6.5-5)的RGB 亮度映射函数推导出式(6.5-6)的CMY 亮度映射函数。
(完整版)数字图像处理大作业
数字图像处理1.图像工程的三个层次是指哪三个层次?各个层次对应的输入、输出对象分别是什么?①图像处理特点:输入是图像,输出也是图像,即图像之间进行的变换。
②图像分割特点:输入是图像,输出是数据。
③图像识别特点:以客观世界为中心,借助知识、经验等来把握整个客观世界。
“输入是数据,输出是理解。
2.常用的颜色模型有哪些(列举三种以上)?并分别说明颜色模型各分量代表的意义。
①RGB(红、绿、蓝)模型②CMY(青、品红、黄)模型③HSI(色调、饱和度、亮度)模型3.什么是图像的采样?什么是图像的量化?1.采样采样的实质就是要用多少点来描述一幅图像,采样结果质量的高低就是用前面所说的图像分辨率来衡量。
简单来讲,对二维空间上连续的图像在水平和垂直方向上等间距地分割成矩形网状结构,所形成的微小方格称为像素点。
一副图像就被采样成有限个像素点构成的集合。
例如:一副640*480分辨率的图像,表示这幅图像是由640*480=307200个像素点组成。
2.量化量化是指要使用多大范围的数值来表示图像采样之后的每一个点。
量化的结果是图像能够容纳的颜色总数,它反映了采样的质量。
针对数字图像而言:采样决定了图像的空间分辨率,换句话说,空间分辨率是图像中可分辨的最小细节。
量化决定了图像的灰度级,即指在灰度级别中可分辨的最小变化。
数字图像处理(第三次课)调用图像格式转换函数实现彩色图像、灰度图像、二值图像、索引图像之间的转换。
图像的类型转换:对于索引图像进行滤波时,必须把它转换为RGB图像,否则对图像的下标进行滤波,得到的结果是毫无意义的;2.用MATLAB完成灰度图像直方图统计代码设计。
6789101112131415161718192021222324252627282930title('lady-lenna');if isrgb(a);b=rgb2gray(a);%RGB转换为灰度图像endsubplot(2,2,2);imshow(b);%显示图像title('ladygaga-lenna');[m,n]=size(a);%返回图像大小e=zeros(1,256);for k=0:255for i=1:mfor j=1:nif a(i,j)==ke(k+1)=e(k+1)+1;%灰度值相同的进行累加endendendendsubplot(2,2,4);bar(e);%画图像的灰度直方图title('灰度直方图');c=imrotate(a,20);%图像的旋转subplot(2,2,3);imshow(c);数字图像处理(第四次课)编写matlab函数,实现在医学图像中数字减影血管造影。
完整版数字图像处理作业题及部分答案
1.数字图像与连续图像相比具有哪些优点?连续图像f(x,y)与数字图像I(c,r)中各量的含义是什么?它们有何联系和区别? (To be compared with an analog image, what are the advantagesof a digital image? Let f(x,y) be an analog image, I(r, c) be a digital image, please giveexplanation and comparison for defined variables: f/I, x/r, and y/c)2.图像处理可分为哪三个阶段? 它们是如何划分的?各有什么特点? (We can divide image processing into 3 stages, what are they? how they are divided? What are their features?)答:低级处理---低层操作,强调图像之间的变换,是一个从图像到图像的过程;中级处理---中层操作,主要对图像中感兴趣的目标进行检测和测量,从而建立对图像的描述,是一个从图像到数值或符号的过程;高级处理---高层操作,研究图像中各目标的性质和相互联系,得出对图像内容含义的理解以及对原来客观场景的解释;3.试从结构和功能等角度分析人类视觉中最基本的几个要素是什么?什么是马赫带效应? 什么是同时对比度?它们反映了什么共同问题? (According to the structure and function of theeyes, what are the basic elements in human vision? What is the Mach Band Effect? What is Simultaneous Contrast? What common facts can we infer from both Mach Band Effect and Simultaneous Contrast?)答:人的视觉系统趋向于过高或过低估计不同亮度区域边界的现象称为“马赫带”效应;同时对比度指的是人的视觉系统对某个区域感觉到的亮度除了依赖于它本身的强度,还与背景有关. 马赫带效应和同时对比度现象表明人所感觉到的亮度并不是强度的简单函数.4.比较说明像素邻域、连接、通路以及连通基本概念的联系与区别。
数字图像处理习题与答案
单选题1、图象在计算机中是如何表示的?A.f(x,y)B.f(x,y,z)C.2D 图象用 f(x,y),3D图象用 f(x,y,z)D.0 和 1 表示正确答案: C2、图象的数字化为什么会丢失信息?A.采样丢失数据B.量化丢失数据C.压缩编码丢失数据D.采样和编码丢失数据正确答案: D3、8 位图象的灰阶范围是多少?A.0 和 1B.0 - 255C.0 - 256D.128正确答案: B4、下列哪一项不是二维图象的存储格式?A..bmpB..tifC..jpgD..dicom正确答案: D5、下列图象分类名称中,哪一项不是按图象传感器分类的?A.雷达图象B.近红外图象C.超声图象D.伪彩图象正确答案: D6、什么是伪彩图象?A.图象中每一个像素点用 RGB 分量表示B.图象中每一个像素点用 RGB 索引表示C.图象中每一个像素点用 HIS 分量表示D.图象中每一个像素点用 0 和 1 表示正确答案: B7、下列哪一项不属于医学图象的有哪些?A.MRI 图象B.CT 图象C.超声多普勒图象D.紫外图象正确答案: D8、下列有关不同模态的图象叙述正确的是?A.不同模态并不能呈现更多信息B.2D 和 3D 结合没故意义C.临床上不同模态的结合需求很高D.不同模态没有太大必要正确答案: C9、下列哪一项是数字图象处理的基本流程?A.图象预处理 -图象分割 -图象识别 -图象建模B.图象预处理 -图象识别 -图象分割 -图象建模C.图象预处理 -图象建模 -图象分割 -图象识别D.图象预处理 -图象建模 -图象识别 -图象分割正确答案: A10、什么是模式识别?A.通过计算机用数学的方法来对不同模式进行自动处理和判读B.通过人工用数学的方法来对不同模式进行自动处理和判读C.通过计算机用数学的方法来对不同模式进行人工处理和判读D.通过人工用数学的方法来对不同模式进行人工处理和判读正确答案: A11 、下列关于灰度直方图的描述不正确的是?A.灰度直方图与图象具有一一对应关系B.灰度直方图是一个分布函数C.利用灰度直方图可以采集到更加优秀的凸显 gD.灰度直方图的横轴表示灰阶,纵轴表示每一个灰阶的像素数量正确答案: A12、下列哪一项不是灰度直方图的特点A.描述了处于不同灰阶的像素数量B.将图象翻转不影响灰度直方图C.描述了每一个像素在图象中的位置D.将图象的一部份平移不会影响灰度直方图正确答案: C13 、下列关于灰度直方图和图象面积叙述正确的是?A.图象面积越大,灰度直方图的 Y 轴越长B.图象面积越大,灰度直方图的 X 轴越长C.灰度直方图按横轴积分得到的值就是图象的面积D.图象的面积与图象的灰度直方图没有关系正确答案: C14、下列关于灰度直方图的双峰性叙述错误的是?A.灰度直方图的双峰可以对应于图象中的前景和背景B.两个峰值中间的部份可以理解为两个高斯信号叠加的结果C.根据双峰可以简单地找到最优二值化的值D.最优二值化处于两个峰值之间正确答案: C15 、下列关于图象二值化叙述正确的是?A.二值化只能使用一个固定的阈值B.二值化后的图象有多个灰阶C.二值化后的图象惟独两个灰阶D.存在对任何图象都通用并且稳定的二值化算法正确答案: C16 、下列哪一个不是求取最优二值化值的算法?A.Otsu algorithmB.Entropy MethodC.Conjugate Gradient MethodD.Isodata algorithm正确答案: C17 、下列二值化和灰度直方图的关系叙述错误的是?A.通常灰度直方图的双峰对应于图象的前景和背景区域B.通过灰度直方图可以知道二值化的最佳阈值C.灰度直方图对二值化有很好的指导意义D.二值化求最佳阈值的过程通常包含分析直方图的步骤正确答案: B18、下列关于 Otsu 算法中“类间方差( between-classes varianc)e ”的描述错误的是?A.类间方差达到最大的情况下即为最优二值化值B.类间方差达到最小的情况下即为最优二值化值C.类间方差有机结合了前景和背景信息,是评价信息量多少的一个评价函数D.类间方差是根据前景部份的方差和背景部份的方差计算得到的正确答案: B19 、下面哪些效果无法通过卷积实现?A.降噪B.边缘检测C.平滑D.把灰度图象彩色化正确答案: D20、下列哪一项不属于图象卷积运算的过程A.卷积核中心挨次覆盖在图象上的每一个像素点上进行运算B.将卷积核覆盖上图象做运算前,要先将卷积核旋转 180 度C.卷积运算每一个步骤得到的值要存储新开的内存中,不能直接在原图上进行修改D.将卷积核的值直接与其覆盖的像素灰度值相乘并累加作为卷积核中心当前覆盖点正确答案: D21、卷积运算中,下列一项处理图象边缘的像素点的方法是错误的?....A.根据卷积核的大小,在图象边缘新增一圈像素点并根据图象边缘的像素进行插值B.在图象边缘进行卷积运算的时候,调整卷积核的大小C.根据卷积核的大小,忽略图象周围一圈的像素D.根据卷积核的大小,在图象周围先填充一圈纯黑或者纯白然后进行卷积运算正确答案: B22 、使用图象卷积操作的除噪方法不包括下列的哪一项?A.均值滤波B.高斯滤波C.开闭运算D.中值滤波正确答案: C23、下列哪个卷积核无法提取图象边缘?正确答案: A24、下列哪一项不是 ITK 的实现特点?A B C DA.使用模板编程实现,用户自由度高B.使用 Cmake 来配置和生产项目C.使用智能指针,自动删除废弃的对象D.仅支持 Window 平台正确答案: D25、下列关于 VTK 的描述错误的是?A.VTK 的类库是按面向对象的思想设计的B.VTK 具有跨平台的特性,支持多个操作系统平台C.VTK 提供了丰富地计算机图象学和图象处理方面的功能D.VTK 是用 C++ 实现的,所以要使用 VTK 只能用 C++ 来调用正确答案: D26、下列哪一项是欧拉距离的表达式正确答案: A27 、形态学操作不能用来做下列哪一项图象处理的操作?A.除噪B.边缘检测C.形状分析D.图象配准正确答案: D.... A B C D28、下列关于结构化要素( SE )描述正确的是?A.结构化要素的尺寸不能超过 3*3B.结构化要素与卷积核一样,原点只能在中心C.结构化要素记录了形态学操作中如何对图象进行平移D.结构化要素的不同对形态学操作的结果没有影响正确答案: C29 、下列关于二值形态学算法叙述错误的是?A.通过开闭运算的结合可以出去图象中的椒盐噪声B.对图象进行重复的开操作会不断产生新的不同的结果C.二值形态学操作包括了二值膨胀、二值腐蚀以及开闭运算D.二值膨胀可以使图象的前景区域扩大正确答案: B30、下列关于二值形态学操作性质描述正确的是?A.二值形态学不满足平移不变性B.通过把一个大的结构化要素分解成较小的结构化要素分别做形态学操作可以有效地提高速度C.二值腐蚀满足交换律D.二值腐蚀和膨胀是可逆的正确答案: B31、下列关于“Hit-and-Mis”s叙述不正确的是?A.通过 Hit-and-Miss可以得到轮廓线B.通过改变 SE 可以检测出不同类型的图案C.Hit-and-Miss是基于形态学的一个特定图案的检测器D.Hit-and-Miss无法检测孤立的点正确答案: D32 、下列关于“Pattern Spectrum”的叙述错误的是?A.Pattern Spectrum可以区分图象中不同尺寸的图案B.Pattern Spectrum可以区分图象中不同形状的图案C.Pattern Spectrum不需要不断重复形态学操作D.Pattern Spectrum在进行过程中需要变换 SE正确答案: C 33 、在计算图象的“distance transfor”m时,下列哪一项形态学操作需要重复进行? A.腐蚀 B.闭操作 C.膨胀 D.开操作正确答案: A 34 、下列关于图象的” distance transfor”m与”skeleton”的关系描述正确的是? A.根据 skeleton可以得到 distance transfor结果B.相同 SE,distance transfor到的结果中,所有邻域内的最大值点就是 skeletonC.不同 SE 对二者的结果都是没有影响的D.skeleton与 distance transfor是m两个不同的概念,没有任何关系正确答案: B35 、一个圆面图象的骨架是什么?A.圆心B.一组同心圆C.从圆心出发到圆边的射线D.一组螺旋线正确答案: A36、下列关于灰度形态学描述错误的是A.灰度腐蚀可使灰度变化更加剧烈B.闭操作可能会使图象变含糊C.开操作可能会使图象变含糊D.灰度膨胀会提高图象的整体亮度正确答案: A 37、下面关于受限制的膨胀算法( conditional dilat)io述不正确的是? A.受限制的膨胀算法可以用来进行灰度重建 B.受限制的膨胀算法需要不断重复灰度膨胀操作C.受限制的膨胀算法执行速度与 SE 的尺寸和形状无关 D.受限制的膨胀算法可以获取图象中的特定区域正确答案: C38 、下列哪一项不是彩色图象的色采空间?A.RGBB.ODBCC.CMYKD.HIS正确答案: B 39、下列关于彩色图象增强描述错误的是? A.使用颜色表的方式可以将灰度图象转化成伪彩图象 B.由于彩色图象获取环境的原因通常需要对图象的色采平衡度进行调整 C.RGB 空间比 HIS 空间更适合做图象对照度的调整D.HIS 空间下进行彩色图象调整在视觉上效果比较直观正确答案: C40、下列关于 HIS 色采空间的描述错误的是?A.通过调整图象的色相可以调整图象的色温B.通过调整图象的亮度可以调整图象的色温C.HIS 色采空间杜宇彩色图象的某些特定操作非常直观方便D.通过调整图象的饱和度来调整图象的对照度正确答案: B41 、下面关于光学断层成像叙述错误的是?A.在对样本进行切片时可能会损坏样本的三维结构B.使用光学断层成像是三维成像的一种方式C.使用光学断层成像可以保留切片与切片之间的相关性D.光学断层成像是通过将样本进行切片来获取样本的三维信息正确答案: C 42、以下四类方法的分割结果按可重复性( Reproducibili y从大到小排序正确的是: A.全自动分割,自动分割后手工修正,手工勾画大体轮廓后自动分割,纯手工分割 B.全自动分割,手工勾画大体轮廓后自动分割,自动分割后手工修正,纯手工分割 C.全自动分割,手工勾画大体轮廓后自动分割,纯手工分割,自动分割后手工修正 D.纯手工分割,自动分割后手工修正,手工勾画大体轮廓后自动分割,全自动分割正确答案: B43、在 DDC 中,当轮廓进行形变后,需要对轮廓进行重采样( Resampling )的原因不包括:A.轮廓上每一个控制点运动后,会产生控制点空间上疏密的变化B.控制点太稀疏不能有效地表示轮廓C.控制点太密会影响到整个运算过程的存储、速度D.需要通过重采样对轮廓进行平滑正确答案: D 44、以 DDC 为例的可变形模型( Deformable model )的特点不正确的是: A. 自动改变轮廓形状以匹配图象边界 B.初始轮廓需要接近图象边界 C.各个参数的选择会影响最终的结果 D.高斯平滑参数越大分割结果越好正确答案: D45、可变形模型( Deformable model )的研究包括:A.定义不同的能量模型B.轮廓的表示方式,如不封闭的轮廓的描述C.整合分割目标的其他信息,如形状模型、灰度分布模型等D.其他三项均是正确答案: D 46、关于水平集( Level se 算法以下各项错误的是: A.通过增加一个维度后的零水平集来表示轮廓B.在水平集的演化过程中,惟独在零水平集,即轮廓处才有速度C.在实际运用中,可以采用快速行进 ( Fast marching) 与水平集的组合,以提高运算速度同时保证最后结果的精确D.水平集算法可以分割三维的数据正确答案: B47、水平集相比于蛇形算法( snake )的好处不包括:A.可以容易地对多个目标进行分割B.可以容易地表示复杂的结构C.对初始轮廓的敏感性相对较小D.用水平集表示轮廓占用的存储空间更小正确答案: D48、以下描述不能用于进行图象分割的是A.对图象进行二值化B.给图象中的区域标出适当标签(Label)C.跟据特征对象素进行分类D.检测图象中是否存在感兴趣的物体正确答案: D49、以下说法不是指的图象的配准(registratio)n的是A.图象的融合( fusion)B.图象的叠加( superimposition)C.图象的匹配( matching )D.图象间的加法( sum )正确答案: D50、图象配准不能完成的是A.同一病人头部 2D 图象与 3D 图象的匹配B.同一病人脑部不同成像方式得到的图象(如 SPECT 图象与 MRI 图象)的融合C.仅有同一个病人头部与腹部的 CT 图象数据,实现两组图象的对齐D.病人头部图象与标准解剖图谱(Atlas)的匹配正确答案: C51、以下说法不正确的是A.手术切除肿瘤先后的影像可以配准B.不同病人的头部影像可以配准C.同一病人整个头部的影像与部份大脑的影像不能配准D.术中影像和术前影像可以配准正确答案: C52、图象配准中不一定会用到的是A.图象插值( Interpolatio)nB.确定图象间的相似性测度( Similarity metr)icC.迭代进行最优化(Optimization)D.图象二值化正确答案: D53 、以下衡量两幅图象相似性并使之达到最佳匹配的方式错误的是:A.最大化两幅图象间的互信息( Mutual information)B.最大化对应的特征点( Landmark )之间的平方距离( Squared distance)之和C.最小化两个对应的面之间的距离测度D.最小化两幅图象间对应像素间灰度值的均方误差正确答案: B54、以下关于重采样( Resampling )的说法错误的是:A.上采样(Super-Sampling)后像素点数目增多B.通过对图象上采样可以获得比原图象更多的信息C.下采样( Sub-Sampling )后,每一个像素点对应的实际空间范围增大D.下采样后,对图象进行显示,若保持每一个像素大小不变,则显示出的图象比原图象变小正确答案: B55、以下关于线性配准( linear registrat)io说法不正确的是:A.刚体配准( rigid registrat)io图象的变换包括平移( translatio)n和旋转 (rotation)B.仿射变换( affine transformati)on是线性变换C.常用的仿射变换包括平移( translatio)n 、旋转( rotation、) 缩放( scaling)和剪切 ( shear)D.线性配准等同于刚体配准正确答案: D56、关于非刚体配准下列说法错误的是:A.可以用薄板样条( Thin plate spli)ne描述非线性形变( Non-linear deformatio)nB.三次b 样条( Cubic B-splin)e 可以用来描述非线性形变C.图象若干个局部发生刚体变换,整体来看发生的仍然是刚体变换D.非刚体形变的自由度要大于刚体形变正确答案: C57、以下关于两幅彻底相同的图象间相似性测度( Similarity metri)cs的说法不正确的是:A.均方误差( Mean squared error)理想值为 0B.正规化的互相关( Normalized cross correlat o理n想值为 0C.理想的联合直方图( Joint histogra彻底集中在对角线上D.正规化的互信息( Normalized mutual informatio)n理想值为 2正确答案: B58、对于彻底相同的两幅图象,将其中一幅图象的灰度值增加到原来的 150% ,则下列说法错误的是:A.正规化的互相关( Normalized cross correlat o理n想值将小于 1B.均方误差( Mean squared error)理想值将大于 0C.理想的联合直方图( Joint histogra彻底集中在一条直线上,但再也不是对角线D.正规化的互信息( Normalized mutual informatio)n理想值仍为 2正确答案: A59、以下关于互信息( Mutual information) 以及联合熵( Joint entrop 的叙述错误的是:A.联合熵的大小是对联合直方图( Joint histogra的分散程度的描述B.互信息具有对称性,即 I(A,B)=I(B,A)C.互信息与联合熵是彻底等价的描述D.当 A,B 之间相互独立时互信息为 0, I(A,B)=0正确答案: C60、使用多解像度( multi-resoluti n图象配准的原因不包括:A.加快配准速度B.图象的细节在配准中是彻底没实用的C.增强配准鲁棒性( Robustness )D.避免陷入局部最优值正确答案: B。
数字图像处理第六章作业---何岗

si 1 ri (i 1,2,3)
C 由 CMY 空间定义公式 M 1 Y
素数表示)是 得:
(对应 RGB 分量),
R s G 可知,对应于 ri 和 i 的 CMY 分量(用 B
ri 1 ri r 1 r
第六章作业
编程题第一题处理结果:
原 RGB 图像
变换后的灰度图像
变换后的 HSV 图像
变换后得到的 RGB 图像
变换后的 NTSC 图像
变换后得到的 RGB 图像
第六章作业
变换后的 YcbCr 图像Biblioteka 变换后得到的 RGB 图像
编程题第二题处理结果:
灰度图像
伪彩色图像
i i
s i 1 si
si 1 si 1 (1 ri ) 1 (1 (1 ri ))
因此:
s 1 ri
编程题
1 任意选择一幅彩色图像,完成多种颜色类型转换。 Matlab 代码实现:
clear all; close all rgb = imread('old_RGB_picture.jpg'); gray=rgb2gray(rgb); imwrite(gray,'gray.jpg') hsv = rgb2hsv(rgb); rgb1 = hsv2rgb(hsv); imwrite(hsv,'hsv.jpg') imwrite(rgb1,'rbg1.jpg') ntsc = rgb2ntsc(rgb); rgb2 = ntsc2rgb(ntsc); imwrite(ntsc,'ntsc.jpg') imwrite(rgb2,'rgb2.jpg') ycbcr = rgb2ycbcr(rgb); rgb2 = ycbcr2rgb(ycbcr); imwrite(ycbcr,'ycbcr.jpg') imwrite(rgb3,'rgb3.jpg') %RGB 色彩模型与 YcbCr 色彩模型互相转换 % RGB 色彩模型与 NTSC 色彩模型互相转换 % RGB 色彩模型与 HSV 色彩模型互相转换 %真彩色图像转换为灰度图像
数字图像处理技术作业解答
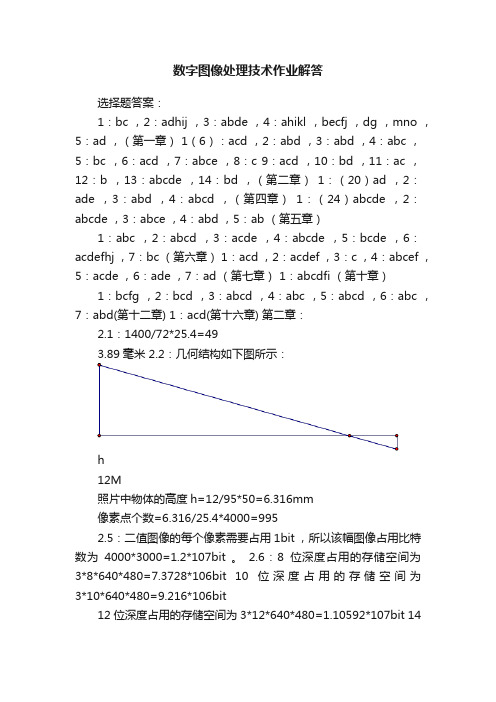
数字图像处理技术作业解答选择题答案:1:bc ,2:adhij ,3:abde ,4:ahikl ,becfj ,dg ,mno ,5:ad ,(第一章) 1(6):acd ,2:abd ,3:abd ,4:abc ,5:bc ,6:acd ,7:abce ,8:c 9:acd ,10:bd ,11:ac ,12:b ,13:abcde ,14:bd ,(第二章)1:(20)ad ,2:ade ,3:abd ,4:abcd ,(第四章)1:(24)abcde ,2:abcde ,3:abce ,4:abd ,5:ab (第五章)1:abc ,2:abcd ,3:acde ,4:abcde ,5:bcde ,6:acdefhj ,7:bc (第六章) 1:acd ,2:acdef ,3:c ,4:abcef ,5:acde ,6:ade ,7:ad (第七章) 1:abcdfi (第十章)1:bcfg ,2:bcd ,3:abcd ,4:abc ,5:abcd ,6:abc ,7:abd(第十二章) 1:acd(第十六章) 第二章:2.1:1400/72*25.4=493.89毫米 2.2:几何结构如下图所示:h12M照片中物体的高度h=12/95*50=6.316mm像素点个数=6.316/25.4*4000=9952.5:二值图像的每个像素需要占用1bit ,所以该幅图像占用比特数为4000*3000=1.2*107bit 。
2.6:8位深度占用的存储空间为3*8*640*480=7.3728*106bit 10位深度占用的存储空间为3*10*640*480=9.216*106bit12位深度占用的存储空间为3*12*640*480=1.10592*107bit 14位深度占用的存储空间为3*14*640*480=1.29024*107bit 第四章:1. 灰度直方图图形化显示时的纵横坐标分别是什么?答:灰度直方图图形化显示时的横坐标表示灰度值,纵坐标表示像素个数或者像素个数百分比。
数字图像处理课程作业答案共98页文档
46、我们若已接受最坏的,就再没有什么损失。——卡耐基 47、书到用时方恨少、事非经过不知难。——陆游 48、书籍把我们引入最美好的社会,使我们认识各个时代的伟大智者。——史美尔斯 49、熟读唐诗三百首,不会作诗也会吟。——孙洙 50、谁和我一样用功,谁就会和我一样成功。——莫扎特
数字图像处理课程作业答案
6、法律的基础有两个,而且只有两个……公平和实用。——伯克 7、有两种和平的暴力,那就是法律和礼节。——歌德
ห้องสมุดไป่ตู้8、法律就是秩序,有好的法律才有好的秩序。——亚里士多德 9、上帝把法律和公平凑合在一起,可是人类却把它拆开。——查·科尔顿 10、一切法律都是无用的,因为好人用不着它们,而坏人又不会因为它们而变得规矩起来。——德谟耶克斯
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字图像处理第六次作业摘要本次报告主要记录第六次作业中的各项任务完成情况。
本次作业以Matlab 2013为平台,结合matlab 函数编程实现对所给图像文件的相关处理:1.在测试图像上产生高斯噪声lena 图-需能指定均值和方差;并用滤波器(自选)恢复图像;2.实现下边要求;(a) 实现模糊滤波器如方程Eq. (5.6-11) ;(b) 模糊lena 图像:45度方向,T=1;(c) 在模糊的lena 图像中增加高斯噪声,均值= 0 ,方差=10 pixels 以产生退化图像;(d)分别利用方程 Eq. (5.8-6)和(5.9-4),恢复图像。
以上任务完成后均得到了预期的结果。
1.在测试图像上产生高斯噪声lena 图-需能指定均值和方差;并用滤波器(自选)恢复图像; (1)实验原理与方法图像复原处理是建立在图像退化的数学模型基础上的,这个退化数学模型能够反映图像退化的原因。
图像的退化过程可以理解为施加于原图像上的运算和噪声两者联合作用的结果,图像退化模型如图1所示,可以表示为:g +(x,y )H [f (x,y )]n(x,y )f (x,y )*h(x,y )n(x,y )==+图1 图像退化模型高斯噪声是指它的概率密度函数服从高斯分布(即正态分布)的一类噪声。
一个高斯随机变量z 的PDF 可表示为:222(z u )P(z )]-=σ 其中z 代表灰度,u 是z 的均值,是z 的标准差。
高斯噪声的灰度值多集中在均值附近。
本文采用5×5模板的中值滤波器和高斯滤波器(σ=1.5) 作业四中已经介绍过,中值滤波器是使用一个像素邻域中灰度级的中值来替代该像素值,即,xy(s,t )S ˆf (x,y ){g(s,t )}median ∈=。
高斯滤波是一种根据高斯函数的形状来选择模板权值的线性平滑滤波方法,具体操作是:用一个模板(或称卷积)扫描图像中的每一个像素,用模板确定的邻域内像素的加权平均灰度值去替代模板中心像素点的值。
利用matlab 中imnoise 函数加入高斯噪声: g=imnoise(f,type,parameters) 调用格式:g = imnoise(I,type)g = imnoise(I,type,parameters) 参数Type 对应的噪声类型如下: 'gaussian'高斯白噪声 'localvar'0均值白噪声'poisson'泊松噪声'salt & pepper'盐椒噪声'speckle'乘性噪声滤波程序同作业四(2)处理结果原始图像lena.bmp加入gaussian噪声后的lena.bmp(u=0.5,s2=0.01)原始图像lena.bmp加入gaussian噪声后的lena.bmp(u=0,s2=0.01)原始图像lena.bmp加入gaussian噪声后的lena.bmp(u=0.5,s2=0.1)(3)结果分析通过imnoise 函数产生了被均值和方差可选的高斯噪声污染的图像。
当高斯噪声均值不变为0时,随着方差增加,图像噪声越严重;当高斯噪声方差不变时,均值会影响到整个图像的灰度值,使整个图像变亮。
与理论上均值和方差对图像的影响一致。
分别使用高斯滤波器和中值滤波器对加噪图像进行恢复。
两种方法在一定程度上都可以降低噪声。
高斯滤波器降低噪声的同时保存的图像细节更丰富,亮度比原噪声图像和中值滤波后图像暗更接近原始图像,中值滤波后图像亮度基本与原噪声图像相同。
2.实现下边要求:(a) 实现模糊滤波器如方程Eq. (5.6-11). (b) 模糊lena 图像:45度方向,T=1;(c) 在模糊的lena 图像中增加高斯噪声,均值= 0 ,方差=10 pixels 以产生退化图像;(d)分别利用方程 Eq. (5.8-6)和(5.9-4),恢复图像;j (ua vb )TH(u,v )sin[(ua vb )]e (ua vb )-π+=π+π+(5.6-11)利用上式模糊lena 图像:45度方向,T=1,即使a=b=0.1,T=1。
对原始图像的图像矩阵做傅里叶变换并移至图像中心得到频域矩阵F ,使H 与F 相乘后反傅里叶变换到空域得到变换后图像。
维纳滤波综合了退化函数和噪声统计特性两个方面进行复原处理,其目标是寻找一个滤波器,使得复原后图像ˆf (x,y )与原始图像f (x,y )的均方误差最小:原始图像lena.bmplena 加入gaussian 噪声后(u=0.5,s 2=0.01).bmp中值滤波(5x5)高斯滤波5x5{}2ˆE f (x,y )f (x,y )min⎡⎤-=⎣⎦因此维纳滤波器又称为最小均方误差滤波器,在频率中用下式表达:221f H(u,v )ˆF(u,v )[]G(u,v )H(u,v )H(u,v )S (u,v )/S (u,v )η=+其中G(u,v)是退化图像的傅里叶变换,H(u,v)是退化函数。
2S (u,v )N(u,v )η= 为噪声功率谱,2f S (u,v )F(u,v )= 为未退化图像的功率谱。
式5.8-6为221H(u,v )ˆF(u,v )[]G(u,v )H(u,v )H(u,v )K=+属于维纳滤波 式5.9-4为22H *(u,v )ˆF(u,v )[]G(u,v )H(u,v )P(u,v )=+γ其中,γ是一个参数,必须对它进行调整以满足22ˆg Hf-=η的条件,属于约束最小二层方滤波利用以上两式恢复图像的流程与对模糊原始图像的流程相似:对原始图像的图像矩阵做傅里叶变换并移至图像中心得到频域矩阵F ,通过H 得到ˆF,使ˆF 与F 相乘后反傅里叶变换到空域得到变换后图像。
在实现 5.9-4时借助matlab 工具包以得到更好的效果。
用fspecial 和imnoise 函数得到45度方向,T=1的模糊lena 图像,并在此图像上实现维纳滤波和约束最小二乘方滤波。
1)imfilter功能:对任意类型数组或多维图像进行滤波。
用法:B = imfilter(A,H)B = imfilter(A,H,option1,option2,...)或写做g = imfilter(f, w, filtering_mode, boundary_options, size_options)其中,f 为输入图像,w 为滤波掩模,g 为滤波后图像。
filtering_mode 用于指定在滤波过程中是使用“相关”还是“卷积”。
boundary_options 用于处理边界充零问题,边界的大小由滤波器的大小确定。
2)fspecial功能:fspecial 函数用于建立预定义的滤波算子。
用法:h = fspecial(type) h = fspecial(type ,para)其中type 指定算子的类型,para 指定相应的参数。
(2)处理结果lena.bmp 原始图像运动模糊化lena.bmp运动模糊化lena.bmp模糊lena.bmp 加入高斯噪声(u=0,s 2=0.01)lena 运动模糊+高斯噪声维纳滤波的结果(K=0.06)(3)结果分析1.按照书上公式编写的模糊函数图像是斜向下45度运动模糊,matlab 函数是斜向上45度运动模糊的,公式的程序得到图像棱角比较分明边界比较明显。
2.使用自己编写的函数进行维纳滤波,难点在于寻找令信噪比最大的K 值,报告中显示了K=0.06时的滤波结果,从结果看,视觉上的效果并不是很理想,噪声依然很大,要想达到更好的效果可能需要寻找更加合适的K 值或者直接使用matlab 的deconvreg 函数实现。
3.最后采用MATLAAB 提供的deconvreg 函数进行约束最小二乘方滤波。
从滤波后的结果看,约束最小二乘方滤波得到了比维纳滤波更好的结果,噪声基本消除,图像变得模糊但是平滑。
附录: 参考文献:[1] Rafael C. Gonzalez., et al. 数字图像处理(第三版), 电子工业出版社, 2011. [2] 周品. MATLAB 数字图像处理北京, 清华大学出版社, 2012源代码:1.img1.m[产生高斯噪声并用高斯滤波器和中值滤波器滤波]I=imread('lena.bmp'); figure(1); subplot(1,2,1)imshow(I);lena 运动模糊+高斯噪声约束最小二乘滤波的结果title('原始图像lena.bmp');imwrite(I,'原始图像lena.bmp');I2=imnoise(I,'gaussian',0.5,0.01);subplot(1,2,2)imshow(I2);title('加入gaussian噪声后的lena.bmp(u=0.5,s^2=0.01)');imwrite(I2,'加入gaussian噪声后的lena.bmp(u=0.5,s^2=0.01).bmp');figure(2);subplot(2,2,1)imshow(I);title('原始图像lena.bmp');subplot(2,2,2)imshow(I2);title('lena加入gaussian噪声后的(u=0.5,s^2=0.01).bmp');n=5;a=ones(n,n);p=size(I2);x1=double(I2);x2=x1;for i=1:p(1)-n+1for j=1:p(2)-n+1c=x1(i:i+(n-1),j:j+(n-1));e=c(1,:);for u=2:ne=[e,c(u,:)];endmm=median(e);x2(i+(n-1)/2,j+(n-1)/2)=mm;endendI3=uint8(x2);subplot(2,2,3)imshow(I3);title('中值滤波(5x5)');imwrite(I3,'中值滤波(5x5).bmp');[I2,map]=imread('加入gaussian噪声后的lena.bmp(u=0.5,s^2=0.01).bmp'); k=1.5;Img=double(I2);n=5;n1=floor((n+1)/2);for i=1:nfor j=1:nb(i,j) =exp(-((i-n1)^2+(j-n1)^2)/(4*k))/(4*pi*k);endendImg1=conv2(Img,b,'same');d=uint8(Img1);subplot(2,2,4);imshow(d,map);title('高斯滤波5x5')2.img2.m[运动模糊+高斯噪声、维纳滤波、约束最小二乘滤波]I=imread('lena.bmp');figure(1);subplot(1,2,1)imshow(I);title('lena.bmp原始图像');imwrite(I,'lena原始图像.bmp');f=double(I);F=fft2(f);F=fftshift(F);[M,N]=size(F);a=0.1;b=0.1;T=1;for u=1:Mfor v=1:NH(u,v)=(T/(pi*(u*a+v*b)))*sin(pi*(u*a+v*b))*exp(-sqrt(-1)*pi*(u*a+v*b)); G(u,v)=H(u,v)*F(u,v);endendG=ifftshift(G);g=ifft2(G);g=256.*g./max(max(g));g=uint8(real(g));subplot(1,2,2);imshow(g);title('运动模糊化lena.bmp');imwrite(g,'lena运动模糊的结果.bmp');figure(2)subplot(1,2,1);imshow(g);title('运动模糊化lena.bmp');imwrite(g,' lena运动模糊的结果.bmp');I2=imnoise(g,'gaussian',0,0.01);subplot(1,2,2)imshow(I2);title('模糊lena.bmp加入高斯噪声(u=0,s^2=0.01)');imwrite(I2,'模糊lena.bmp加入高斯噪声(u=0,s^2=0.01).bmp');figure(3)I=imread('lena.bmp');h=fspecial('motion',50,45);I1=imfilter(I,h,'circular','conv');I2=imnoise(I1,'gaussian',0,0.01);subplot(1,2,1)imshow(I2);title('lena运动模糊+高斯噪声');imwrite(I2,'lena运动模糊+高斯噪声.bmp');g1=double(I2);G1=fft2(g1);G1=fftshift(G1);[M,N]=size(G1);a=0.1;b=0.1;T=1;K=0.06;for u=1:Mfor v=1:NH1(u,v)=(T/(pi*(u*a+v*b)))*sin(pi*(u*a+v*b))*exp(-sqrt(-1)*pi*(u*a+v*b)); F(u,v)=1/H1(u,v)*(abs(H1(u,v)))^2/((abs(H1(u,v)))^2+K)*G1(u,v);endendF=ifftshift(F);f=ifft2(F);f=256.*f./max(max(f));f=uint8(real(f));subplot(1,2,2)imshow(f);title('维纳滤波的结果(K=0.06)');imwrite(f,'维纳滤波的结果(K=0.06).bmp');I=imread('lena.bmp');h=fspecial('motion',50,45);I1=imfilter(I,h,'circular','conv');I2=imnoise(I1,'gaussian',0,0.01);figure(4);subplot(1,2,1)imshow(I2);title('lena运动模糊+高斯噪声');imwrite(I2,' lena运动模糊+高斯噪声.bmp');V=0.0001;NoisePower=V*prod(size(I));[g,LAGRA]=deconvreg(I1,h,NoisePower);subplot(1,2,2)imshow(g);title('约束最小二乘滤波的结果');imwrite(g,'约束最小二乘滤波的结果.bmp');(注:可编辑下载,若有不当之处,请指正,谢谢!)。