实验七 图像边沿检测及轮廓提取
图像边缘的检测与提取

3.4 基于数学形态学的图像边缘提取研究。
数学形态学是数字图像处理领域中的一门新兴学科,它在形状识别、边缘检测、纹理分析、图像恢复和增强等领域得到了广泛应用。
形态学图像处理是以几何学为基础的,它着重研究图像的集合结构。
它的基本思想是利用一个结构元素去探测一个图像,看是否能够将这个结构元素很好地填放在图像的内部,同时验证填放结构元素的方法是否有效[1]。
运用数学形态学检测图像边缘信息,取决于结构元素的选取和算法的构造。
在不同的应用场合,结构元素的选择及其相应的处理算法是不一样的,对不同的目标图像应该设计不同的结构元素和不同的处理算法。
但是对于复杂的图像,其边缘特征信息很难通过一个结构元素来提取,这也是形态学图像处理中的一个难点。
目前比较行之有效的方法就是将形态学运算与集合运算结合起来,采用多个结构元素分别对图像进行变换,然后将变换后的图像合并起来,即多结构元素形态学变换。
本文运用数学形态学的理论和方法,从多结构元素形态学变换的角度出发,提出了一种多结构元素的选取方案,并采取适当的处理算法进行图像边缘检测。
3.4.1 数学形态学的运算数学形态的基本运算是腐蚀运算和膨胀运算。
下面首先介绍一下腐蚀运算和膨胀运算的定义。
设A 是原始图像,B 是“结构元素”。
腐蚀运算定义为:E(A)= AΘB={(x, y) |Bxy ⊆ A} (1)也就是说,由B 对 A 腐蚀所产生的二值图像E(A)是这样的点(x,y)的集合:如果B的原点移到(x,y)点,那么B 将完全包含于A 中。
膨胀运算定义为:D(A) =A⊕B={(x, y) |Bxy A≠Φ} (2)也就是说,B 对A 膨胀产生的二值图像D(A)是由这样的点(x,y)组合的集合,如图B 的原点位移到(x,y),那么它与A 的交集非空。
在此还要介绍一下数学形态学中的2 种基本操作:补操作和并操作,其代数表达式如下所述。
目标图像--A的补操作定义为:--A={(x, y) | (x, y)∈W ∧ (x, y)∉ A} (3)其中,符号∧表示与逻辑,A 的补图像--A实际上描述的是图像A 的背景。
图像识别中的轮廓提取算法探索(七)

图像识别中的轮廓提取算法探索引言:图像识别技术如今已经广泛应用于各个领域,其关键之一就是图像中的轮廓提取算法。
轮廓提取的准确与否直接影响到图像识别的效果。
本文将探索图像识别中常用的轮廓提取算法,并对其原理和优缺点进行分析。
一、边缘检测算法边缘检测是图像处理中最基础的一步,是进行轮廓提取的前提。
常用的边缘检测算法有Sobel算子、Laplacian算子和Canny算子等。
1. Sobel算子Sobel算子是一种基于梯度的边缘检测算法,其原理是通过计算每个像素点的梯度值来判断其是否为边缘点。
然后根据梯度值的大小确定边缘的强度,进而提取轮廓。
Sobel算子的优点是计算简单,对噪声鲁棒性强。
但其缺点也较为明显,容易产生边缘断裂的情况,并且对角线边缘检测效果较差。
2. Laplacian算子Laplacian算子是一种基于二阶导数的边缘检测算法,其原理是通过计算图像中每个像素点的二阶导数来判断其是否为边缘点。
Laplacian算子的优点是能够检测出边缘的交叉点,能够更精准地定位边缘。
但其缺点是对噪声比较敏感,容易产生误检。
3. Canny算子Canny算子是一种综合考虑多种因素的边缘检测算法,其原理是通过梯度计算、非极大值抑制和阈值处理来提取目标轮廓。
Canny算子的优点是能够提取清晰且连续的边缘,对噪声抑制效果好。
但其缺点是计算量较大,算法较为复杂。
二、区域生长算法区域生长算法是一种基于种子点的轮廓提取方法,其原理是在图像中选择若干个种子点,然后通过像素点之间的相似性判断来逐渐生长成为一个完整的区域。
区域生长算法的优点是能够提取出连续且相似的轮廓,适用于要求较高的图像识别任务。
但其缺点是对种子点的选择比较敏感,容易受到图像质量和噪声的影响。
三、边缘跟踪算法边缘跟踪算法是一种基于边缘连接的轮廓提取方法,其原理是通过追踪边缘点的连接关系,形成完整的轮廓。
边缘跟踪算法的优点是能够提取出精细的轮廓,并且对噪声抑制效果好。
数字图像的边缘检测毕业论文
摘要数字图像的轮廓提取是数字图像处理中的一个重要方面,目的是在一幅图像中提取对象的外部轮廓,为下一步的形状分析和目标识别做准备,是许多有关图像研究的重要中间环节。
本文讲述了怎样对数字图像进行简单的轮廓提取, 包括图像的预处理过程和轮廓提取的一般方法。
首先要对原始图像进行预处理,处理方法主要有图像平滑、中值滤波、梯度锐化和拉普拉斯锐化等。
图像平滑处理能去除部分噪声干扰,但同时也弱化了图像的边缘轮廓,而中值滤波处理去除噪声的效果相对来说要好。
梯度锐化、拉普拉斯锐化等处理方法能增强图像的边缘轮廓,也相对的弱化了噪声对轮廓提取的干扰。
通过对图像进行一些预处理后,就可以用不同的边缘检测算法检测出不同图像的边缘轮廓,然后通过软件实现掏空目标区域的内部点,来提取出图像的轮廓。
从图像中提取出来的轮廓可以用于进一步的图像识别、数学特征计算等研究。
它的应用是很广泛的,比如医学图像、电影、电视、出版物、摄影等等。
本文是基于Visual C++环境实现的数字图像的轮廓提取,所用编程工具为Visual Studio 2005,它能帮助用户直观的、可视地设计程序的用户界面,可以方便的编写和管理各种类,维护程序源代码,因此能有效的提高开发效率。
关键词:图像预处理;边缘检测;轮廓提取AbstractDigital image processing contour extraction is an important aspect in Digital Image Processing.It’s purpose is to extract objects in an image of the external contour. Preparing for the next shape analy sis and object recognition. It’s the image of many of the important intermediate links.This article describes how to extract the contour of digital images simply. Including image pre-processing process,and the general contour extraction method. First of all is the original image pre-processing. Treatment methods have Image smoothing, median filtering, gradient sharpening and Laplacian sharpening etc.Image smoothing could remove part of the noise, But it also weakened the image edges,and median filtering can remove noise better. Gradient sharpening and Laplacian sharpening can enhance the image edges, they also have a relative weakening of the interference noise on the contour extraction.After some pre-processings to the digital image, we can use different edge detection algorithms to detect different egde of images,then empting the internal point of the target area to extract the contour of images.Contours extracted from the feature can be used for further image recognition, mathematical calculation of characteristic. Its application is very broad, such as medical images, movies, television, publications, photography, etc.This article is based on Visual C++ implementation of the digital image contour extraction. Programming tool used to Visual Studio 2005. They can help to design the user interface of a process intuitive and visually, to preparate and manage classes easily,and to maintain the program source.Therefore,to improve the development efficiency effectively.Key words: Image pre-processing; Edge Detection;Contour extraction目录摘要 (I)Abstract (II)第一章绪论 (1)1.1 数字图像处理基础 (1)1.1.1 图像的概念 (1)1.1.2 图像处理 (1)1.2 数字图像处理的发展及应用 (2)1.2.1 数字图像处理发展前景 (2)1.2.2 数字图像处理的应用 (3)1.3 Visual Studio 2005简介 (5)第二章图像的预处理 (7)2.1 图像的平滑滤波 (7)2.1.1 图像平滑 (7)2.1.2 图像中值滤波 (9)2.2 图像增强 (11)2.2.1 拉普拉斯锐化 (11)2.2.2 平移和差分边缘增强 (14)2.2.3 梯度锐化 (15)2.3本章小结 (15)第三章图像的边缘检测 (17)3.1 边缘检测 (17)3.1.1 边缘类型及模板 (17)3.1.2 Sobel边缘算法 (18)3.1.3 Roberts边缘算法 (20)3.1.4 Prewitt边缘算法 (20)3.1.5 Kirsch边缘算法 (21)3.1.6 Gauss-Laplacian边缘算法 (22)3.2本章小结 (23)第四章图像的轮廓提取 (24)4.1轮廓提取原理 (24)4.2轮廓提取算法 (24)4.2.1 一般算法 (24)4.2.2 轮廓边界跟踪法 (25)4.3轮廓提取效果 (27)4.4本章小结 (29)第五章工作总结及未来展望 (30)5.1工作总结 (30)5.2未来展望 (30)参考文献 (31)附录A 设备无关类DIB (33)附录B 轮廓提取 (35)致谢 ........................................................................................................... 错误!未定义书签。
图像边缘提取算法研究报告
图像边缘提取算法研究报告概述图像的边缘包含了图像最重要的信息。
什么是边缘?一般是指图像灰度变化率最大的位置。
从成因上看,一般图像边缘主要由四个方面的因素形成:(1>图像灰度在表面法向变化的不连续造成的边缘;(2>图像对像素在空间上不一致形成的边缘;(3>在光滑的表面上由于颜色的不一致形成的边缘:(4>物体的光影造成的边缘。
图像边缘提取的作用有:(1>改良图像质量;(2>分离对象;(3>理解和重构视觉场景;(4>识别特征;(5>其他。
b5E2RGbCAP 图像边缘检测是图像处理与计算机视觉共同的基本课题,1960年以来,相继发展了一系列采用梯度算子和拉普拉斯算子的边缘检测技术;为了降低图像噪声对边缘检测算法的干扰,1980年以来,又建立了高斯低通滤波与拉普拉斯算子复合的过零点检测Marr-Hildreth 理论;在另一个方向上,1980年代初期,Canny 从信号处理的角度出发,使边缘检测算法更具有实用性。
本报告主要介绍以上以上几个方面的内容,通过matlab 程序实现以上几种算法,对比各种算法的性能。
p1EanqFDPw 算法介绍及相应程序一、 基于微分算子的边缘检测检测图像边缘信息,可以把图像看做曲面,边缘就是图像的变化最剧烈的位置。
这里所讲的边缘信息包含两个方面:一是边缘的具体位置,即像素的坐标;而是边缘的方向。
微分算子有两个重要性质:定域性(或局部性>、敏感性(或无界性>。
敏感性就是说,它对局部的函数值变化很敏感,但是因其对变化过于敏感又有了天然的缺陷——不能抵抗噪声。
局部性意思是指,每一点的导数只与函数在该点邻近的信息有关。
DXDiTa9E3d 主要有两大类基于微分算子的边缘检测技术:一阶微分算子边缘检测与二阶微分算子边缘检测。
这些检测技术采用以下的基本步骤:RTCrpUDGiT (1)将相应的微分算子简化为离散的差分格式,进而简化为模板(记为T>。
图像平滑、边沿检测

边界处理
模板不允许移出边界, 模板不允许移出边界,所以结果图象会比原图小
模版
原图 模板操作后的图
平化处理效果
原图
经过平滑处理后的图
•邻域平均法的思想是通过一点和邻域内像素点求平均来去除突 变的像素点,从而滤掉一定的噪声,其主要优点是算法简单, 计算速度快, 但其代价是会造成图像一定程度上的模糊。 •邻域平均法的平滑效果与所采用邻域的半径(模板大小)有关。 半径愈大, 则图像的模糊程度越大。 •为解决邻域平均法造成图像模糊的问题,可采用阈值法、K邻 点平均法、梯度倒数加权平滑法、 最大均匀性平滑法、小斜面 模型平滑法等。它们讨论的重点都在于如何选择邻域的大小、 形状和方向,如何选择参加平均的点数以及邻域各点的权重系 数等。
中值滤波
原图中间的6和周围的灰度相差很大,是一个噪声点。经 过3×1窗口(即水平3个象素取中间值)的中值滤波,得到 右边那幅图,可以看出,噪声点被去除了
原图
处理后的图
中值滤波的特点(1)
原图 经Box模板处理后 经Gauss模板处理后 经中值滤波处理后
从原图中看出左边区域灰度值低,右边区域灰度值高,中间有一条 明显的边界;应用平滑模板后,图象平滑了,但是也使边界模糊了。 应用中值滤波,就能很好地保持原来的边界。所以中值滤波的特点 是保护图象边缘的同时去除噪声。
普通Sobel算子 算子 普通
各向同性Sobel算子 算子 各向同性
拉普拉斯算子
由于噪声点对边沿检测有一定的影响,所以效果更好的边 沿检测器是高斯拉普拉斯(LOG)算子。 它把高斯平滑滤波器和拉普拉斯锐化滤波器结合了起来, 先平滑掉噪声,再进行边沿检测,所以效果会更好。
拉普拉斯模板
拉普拉斯模板
中值滤波的特点(2)
图像处理实验报告实验目的:图像边缘检测和提取:分别用4和8连通的
图像处理实验报告实验目的:图像边缘检测和提取:分别用4和8连通的方法提取图像的边缘,将提取的边缘坐标保存入文本文件,并能通过读取文本文件恢复边缘图像。
实验原理:有两种方法可以提取边缘点:一.轮廓跟踪按照从左到右,从上到下的顺序搜索,找到的第一个黑点一定是最左下的边界点,记为A。
由于边界是连续的,所以每一个边界点都可以用这个边界点对前一个边界点所张的角度来表示。
因此可用下面跟踪准则:从第一个边界点开始,定义初始的搜索方向为沿左上方;如果左上方的点是黑点,则为边界点,否则搜索方向顺时针旋转45度(8连通方法为90度)。
这样一直到找到第一个黑点为止。
然后把这个黑点作为新的边界点,在当前搜索方向的基础上逆时针旋转90度,继续用同样的方法搜索下一个黑点,直到返回最初的边界点为止。
二.轮廓提取二值图图像轮廓提取,掏空内部,如果原图中有一点为黑色,且它的相邻点为黑色(此时是内部点),则将该点删除。
取4个相邻点则为4连通,8个相邻点则为8连通。
根据本实验中图像,为简单的二值图,且有3个黑块,用第一种方法不易跟踪,所以选用第二种方法较简单。
实现方法:所用4连通与8连通方法区别仅是选取的相邻点个数不同,实现方法基本一致,所以不分开论述。
步骤:1.遍历原图像每个像素,如果此像素及周围的点(4个或8个)都为黑点,则该像素认为是内部点,将其删除。
遍历一边,等于掏空图像内部点,仅剩边缘点。
2.用一个结构数组存储图像边缘点的坐标。
在一个新建的文本文件中依次写入图像高度和宽度,边缘像素点总个数,每个边缘点的坐标。
此步骤完成边缘的提取。
3.打开一个新pic图像,读取指定文本文件中的数据,即步骤2中存储内容。
然后在新打开的图像中改变图像高度和宽度,依读入的坐标点将相应点变为黑色,恢复边缘。
此步骤完成边缘的恢复。
4连通和8连通算法的比较:1.4连通算法中检测四个方向的像素点,会将图像内部更多的黑色点腐蚀,所留下的边界是8连通的。
8连通算法相反,所留下的边界是4连通的。
图像的边缘检测实验处理报告

数字视频图像处理与通信实验实验项目:图像的边缘检测指导老师:***班级:姓名:学号:图像的边缘检测实验报告一;实验目的:1.掌握图像边缘检测的基本概念以及边缘检测的基本方法;2.通过matlab 实验的具体操作来具体掌握空间图像边缘检测的方法;3.通过matlab 实验来验证所学知识,达到学以致用;4.通过matlab 实验来理解roberts 、sobel 、canny 、log 几种算子的原理以及各个算法的优缺点,并加以比较。
二;实验原理:图像的边缘是图像最基本的特征之一。
所谓边缘(或边沿)是指周围像素灰度有阶跃性变化或“屋顶”变化的那些像素的集合。
边缘广泛存在于物体与背景之间、物体与物体之间、基元与基元之间,因此它是图像分割依赖的重要特征。
图像边缘对图像识别和计算机分析十分有用,边缘能勾划出目标物体,使观察者一目了然;边缘蕴含了丰富的内在信息(如方向、阶跃性质、形状等)。
从本质上说,图像边缘是图像局部特性不连续性(灰度突变、颜色突变、纹理结构突变等)的反应,它标志着一个区域的终结和另一个区域的开始。
边缘检测技术是所有基于边界分割的图像分析方法的第一步,首先检测出图像局部特性的不连续性,再将它们连成边界,这些边界把图像分成不同的区域,检测出边缘的图像就可以进行特征提取和形状分析,但各算子有自己的优缺点和适用领域。
Roberts 算子Roberts 算子是一种利用局部差分算子寻找边缘的算子,由下式给出: g(x,y)={[y x f ,(-)1,1(++y x f ]2+[y x f ,(- )1,1(++y x f ]2}21 ,其中f(x,y)是具有整数像素坐标的输入图像,平方根运算使该处理类似于在人类视觉系统中发生的过程。
Roberts 算子边缘定位准,但是对噪声敏感。
适用于边缘明显而且噪声较少的图像分割,在应用中经常用Roberts 算子来提取道路。
Prewitt 边缘算子Prewitt 边缘算子的卷积和如图所示,图像中的每个像素都用这两个核做卷积,取最大值作为输出,也产生一幅边缘幅度图像。
图像处理边缘提取与分割实验报告附源码

图像处理边缘提取与分割实验报告附源码实验一数字图像处理实例专业:模式识别与智能系统姓名:XXX学号:*************边缘提取与图像分割理论、算法、源码与实例1)理论一、边缘检测的基本方法:各种差分算子,主要有:差分边缘检测方法Roberts梯度模算子前两种对垂直,水平,对角检测好。
Prewitt算子,Robinson算子(算八个方向的梯度最大值)Sobel算子(利用上下左右加权,可平滑噪声);Kirsch算子Rosenfeld算子Laplace算子(二阶导数算子,一般不用于检测,用于之后判别暗区与明区。
)LOG算子,(XXX平滑后求导提取边界。
)主要思路用高斯函数对图像平滑滤波,然后再对图像进行拉普拉斯运算,算得的值等于零的点认为是边界点。
该算法高斯函数方差取值很重要,过大会导至精度不高。
还容易产生虚假边界。
但可以用一些准备去除虚假边界。
对于灰度渐变图的效果也不太好。
但大部份图片边缘提取效果还好。
Canny边界检测算子二、拟合曲面求导提取边界。
主要思路为在点的邻域各点拟合一个曲面,由曲面的求导代替离散点求差分,这种方法对于噪声比较不敏感。
三、统计判决法提取边界以误判几率最小化设置门限,对边界检测算子作用后的每一个像点判别/。
统计判决法依赖于先验知识。
四、分裂—合并算法按一定的均一化标准,将图片分成子图。
合并满足均一性准则的子图。
实验一数字图像处理实例专业:模式识别与智能系统姓名:陈光磊学号:*************五、跟踪技术1)区域跟踪,基于区域的图像分割方法。
应用于直接提取区域。
检测满足跟踪准则的点,找到这样的点,检测其所有邻点,把满足跟踪准则的任合邻点合并再重复。
直到没有邻点满足检测准则。
2)曲线跟踪,基于边界的图像分割方法。
对整幅图扫描,对所有“目前点”的邻点检测,周围没有满足跟踪条件的点时,返回到上一个最近的分支处,掏出另一个满足跟踪原则的目前点。
重复根踪。
6、模型化与统计检验法检测边界开始步骤为对图像划分成多块子图,每块子图进行曲面拟合。
图像边缘检测实验报告

图像边缘检测实验报告图像边缘检测实验报告引言:图像边缘检测是计算机视觉领域中一项重要的任务,它在许多应用中都起到关键作用。
边缘是图像中不同区域之间的分界线,它们包含了图像中物体的轮廓和形状信息。
因此,准确地检测和提取图像边缘对于目标识别、图像分割和特征提取等任务至关重要。
实验目的:本实验旨在通过实践探索和理解常用的图像边缘检测算法,并对其性能进行评估。
我们将使用不同的算法对一组测试图像进行边缘检测,并比较它们的结果,以了解它们的优缺点和适用场景。
实验方法:1. 数据准备:我们从公开的图像数据库中选择了一组具有不同特征和复杂度的测试图像。
这些图像包括自然风景、人物肖像和建筑物等多种场景,以覆盖不同的应用场景。
2. 算法选择:我们选择了三种常用的图像边缘检测算法进行实验:Sobel算子、Canny算子和Laplacian算子。
这三种算法在实践中被广泛应用,并且具有不同的特点和适用范围。
3. 实验步骤:a) Sobel算子:我们首先将测试图像转换为灰度图像,然后使用Sobel算子对其进行边缘检测。
Sobel算子是一种基于梯度的算法,它通过计算图像中每个像素点的梯度值来检测边缘。
b) Canny算子:接下来,我们使用Canny算子对同一组测试图像进行边缘检测。
Canny算子是一种基于多阶段处理的算法,它首先使用高斯滤波器对图像进行平滑处理,然后计算梯度和非最大抑制,最后进行边缘连接和阈值处理。
c) Laplacian算子:最后,我们使用Laplacian算子对测试图像进行边缘检测。
Laplacian算子是一种基于二阶导数的算法,它通过计算图像中每个像素点的二阶导数值来检测边缘。
实验结果:通过对实验图像的边缘检测,我们得到了以下结果:1. Sobel算子产生了较为明显的边缘线,但在一些复杂场景下容易产生噪声,并且边缘线有时会断裂。
2. Canny算子在平滑处理后能够准确地检测到图像中的边缘,并且能够消除噪声和断裂的边缘线。
Canny边缘检测与轮廓提取
武汉理工大学《通信工程应用技术综合训练与实习》报告目录摘要 (I)Abstract (II)1 绪论 (1)2 设计内容与OpenCV简介 (2)2.1 设计任务内容 (2)2.2 OpenCV简介 (2)3 理论分析 (3)3.1 边缘检测 (3)3.1.1 图像的边缘 (3)3.1.2 边缘检测的基本步骤 (3)3.2 轮廓提取 (4)4 边缘检测的算法比较 (5)4.1 Reborts算子 (5)4.2 Sobel算子 (5)4.3 Prewitt 算子 (6)4.4 Kirsch 算子 (7)4.5 LOG算子 (7)4.6 Canny算子 (8)5 实验仿真 (10)5.1算法设计 (10)5.2 实验结果 (11)6 分析与总结 (12)参考文献 (13)附录 (14)武汉理工大学《通信工程应用技术综合训练与实习》报告摘要边缘检测是图像处理和计算机视觉中的基本问题,它的目的是标识出数字图像中亮度变化明显的点。
图像经过边沿检测处理之后,不仅大幅度地减少了数据量,并且剔除了可以认为不相关的信息,保留了图像重要的结构属性。
事实上,边缘存在于图像的不规则结构和不平稳现象中,也即存在于信号的突变点处,这些点给出了图像轮廓的位置。
这些轮廓常常是我们在图像边缘检测时,所需要的非常重要的一些特征条件,这就需要我们对一幅图像检测并提取出它的边缘。
可用于图像边缘检测和轮廓提取的方法有很多,其中包括有常见的Robert边缘算子、Prewitt 边缘算子、Sobel边缘算子等等。
本文首先将会从数字图像处理的角度,对几种边缘检测算法进行详细的分析,然后会并选择其中一种边缘检测算法进行实验。
考虑到以后进一步的学习,本文将会使用openCV对算法进行实现。
最后,本文将会把实验获得的实际效果,与理论分析的结果进行比对,并以此对本次实验进行总结。
关键字:边缘检测轮廓提取图像处理openCV武汉理工大学《通信工程应用技术综合训练与实习》报告AbstractEdge detection is the basic problem in image processing and computer vision, its purpose is to identify the digital image brightness changes in the obvious points.Image after edge detection processing, not only greatly reduces the amount of data, and eliminated can think irrelevant information, keep the structure of the image important attribute.Edge of image, in fact, exist in the image of the irregular structure and unstable phenomenon, which exists in the abrupt change point of the signal, the point the location of the image contour is presented.These contours are often in image edge detection, we need some important characteristics of the condition, this needs us to the edge of an image detection and extract it.There are so many method can be used in image edge detection and contour extraction, including common Robert edge operator, Prewitt edge operator, Sobel edge operator and so on.At first, this paper will, from the perspective of digital image processing and analysis of several kinds of edge detection algorithms in detail, and then select one of the edge detection algorithm for experiments.After considering the further study, this paper implemented the algorithm will use openCV.Finally, this article will obtain the actual effect of the experiment, and compares the results of theoretical analysis, and then to summarize this experiment.Keywords: Edge detection Contour extraction Image processing openCV武汉理工大学《通信工程应用技术综合训练与实习》报告1 绪论数字图像处理技术的迅猛发展,其应用前景得到了不可限量的扩展,如今各行各业都在积极发展与图像相关的技术。
边缘检测和轮廓提取

目录摘要 (2)Abstract (3)1概述 (4)1.1数字图像处理的意义 (4)1.2MATLAB简介 (4)1.3设计任务 (5)2边缘检测 (6)2.1图像的边缘 (6)2.2边缘检测的基本步骤 (6)2.3边缘检测算法 (7)2.3.1Reborts算子 (7)2.3.2Sobel算子 (8)2.3.3Prewitt 算子 (8)2.3.4Kirsch 算子 (9)2.3.5LOG算子 (10)2.3.6Canny算子 (11)3轮廓提取 (12)4实验仿真 (13)4.1 Sobel算子代码 (13)4.2轮廓提取算法 (15)4.3仿真结果及分析 (18)5实验小结 (19)6参考文献 (20)摘要图像边缘是图像最基本的特征之一,往往携带着一幅图像的大部分信息。
而边缘存在于图像的不规则结构和不平稳现象中,也即存在于信号的突变点处,这些点给出了图像轮廓的位置,这些轮廓常常是我们在图像边缘检测时所需要的非常重要的一些特征条件,这就需要我们对一幅图像检测并提取出它的边缘。
而边缘检测算法则是图像边缘检测问题中经典技术难题之一,它的解决对于我们进行高层次的特征描述、识别和理解等有着重大的影响;又由于边缘检测在许多方面都有着非常重要的使用价值,所以人们一直在致力于研究和解决如何构造出具有良好性质及好的效果的边缘检测算子的问题。
本此实验主要分析几种应用于数字图像处理中的边缘检测算子,根据它们在实践中的应用结果进行研究,主要包括:Robert 边缘算子、Prewitt 边缘算子、Sobel 边缘算子、Kirsch 边缘算子以及Laplacian 算子等对图像及噪声图像的边缘检测,根据实验处理结果讨论了几种检测方法的优劣.关键词:数字图像处理;边缘检测;算子AbstractThe edges of the image, one of the basic characteristics of the image tend to carry most of the information in the image. Edge exists in the irregular structure of the image and non-stationary phenomena, i.e. exist in a mutation point of the signal, these points are given the location of the image contours, these contours are often required in image edge detection is very important some of the characteristics of the condition, which we need to detect and extract its edge image. The edge detection algorithm is the classic one of the technical problems of image edge detection problems, the solution for our high-level characterization, recognition and understanding has a significant impact; edge detection are very important in many ways value in use, so people have been devoted to the study and solve the problem of how to construct edge detection operator with a good nature and good results.This experiment analysis of several used in digital image processing, edge detection operator research results according to their application in practice, including: The Robert Edge Operator child Prewitt edge operator, Sobel edge operator, Kirsch edge operator and Laplacian operator on the image and noise image edge detection discussed the pros and cons of several detection methods, according to the results of the experimental treatment.Keywords: digital image processing; edge detection; operator1概述1.1数字图像处理的意义数字图像处理技术的迅猛发展,其应用前景得到了不可限量的扩展,如今各行各业都在积极发展与图像相关的技术。
医学图像边界检测与轮廓线提取ppt课件
图像平滑
图像平滑的目的是去除数据采集过程中产生的噪声。 图像平滑的原则是:用滤波器有选择的去除噪声。
常用的滤波器有: 高斯滤波、均值滤波 中值滤波、双边滤波(Bilateral filter)
轮廓提取算子
图象的一阶导数可以用于检测图象的边缘,一 阶导数通常可以通过二维梯度来近似计算,于是产 生了各种提取图象边缘的梯度算子。比较常见的梯 度算子有:
轮廓线的提取
主要内容
1
研究背景
2
CT切片图像预处理
Hale Waihona Puke 3边缘检测与轮廓线提取
4
综合应用
5
总结
研究背景
如今,医学成像技术,如计算机断层扫 描、磁共振、PET和B超等,被广泛用于医疗 诊断和外科手术规划中。随着计算机成、像 和扫描技术的发展,现在已经可以由医学图 像(如CT图像)生成医用三维模型。
重建后的三维模型可以提供宝贵的医疗 信息,可以作为一个强大的诊断工具使外科 医生能够了解人体复杂的解剖学结构,还可 以用于制造人造器官(人造骨,血管)和各 种医学仿真和分析。
医学图像生成三维模型
对医学图像的三维重建,现在存在着很 多方法,但大多数可以归为两类:
基于体素的方法
医学图像生成 三维模型
基于轮廓线的方法
基于轮廓线的方法
1.从医学图像中提取出横截面轮廓 数据
2.对横截面轮廓线进行平滑处理
3.由各个横截面的轮廓线生成三维 模型表面
基于轮廓线 的方法
用于进行颅骨及人脸三维重构的CT数据,从 原始数据的采集到生成重构所需的轮廓,即 等值线,经历了如下图的数据流程。
射线扫描
用梯度算子和四邻域法取得的骨骼轮廓线是若干条 封闭的曲线,包括内外两层。为了得到无厚度的三 维颅骨模型必须对提取到的轮廓线进行简化,取出 最外层的骨骼轮廓线。
图像边缘特征及提取算法
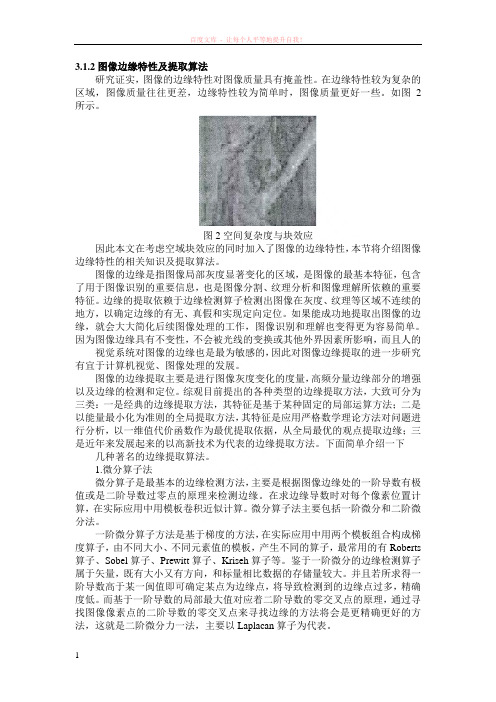
3.1.2图像边缘特性及提取算法研究证实,图像的边缘特性对图像质量具有掩盖性。
在边缘特性较为复杂的区域,图像质量往往更差,边缘特性较为简单时,图像质量更好一些。
如图2所示。
图2空间复杂度与块效应因此本文在考虑空域块效应的同时加入了图像的边缘特性,本节将介绍图像边缘特性的相关知识及提取算法。
图像的边缘是指图像局部灰度显著变化的区域,是图像的最基本特征,包含了用于图像识别的重要信息,也是图像分割、纹理分析和图像理解所依赖的重要特征。
边缘的提取依赖于边缘检测算子检测出图像在灰度、纹理等区域不连续的地方,以确定边缘的有无、真假和实现定向定位。
如果能成功地提取出图像的边缘,就会大大简化后续图像处理的工作,图像识别和理解也变得更为容易简单。
因为图像边缘具有不变性,不会被光线的变换或其他外界因素所影响,而且人的视觉系统对图像的边缘也是最为敏感的,因此对图像边缘提取的进一步研究有宜于计算机视觉、图像处理的发展。
图像的边缘提取主要是进行图像灰度变化的度量,高频分量边缘部分的增强以及边缘的检测和定位。
综观目前提出的各种类型的边缘提取方法,大致可分为三类:一是经典的边缘提取方法,其特征是基于某种固定的局部运算方法;二是以能量最小化为准则的全局提取方法,其特征是应用严格数学理论方法对问题进行分析,以一维值代价函数作为最优提取依据,从全局最优的观点提取边缘;三是近年来发展起来的以高新技术为代表的边缘提取方法。
下面简单介绍一下几种著名的边缘提取算法。
1.微分算子法微分算子是最基本的边缘检测方法,主要是根据图像边缘处的一阶导数有极值或是二阶导数过零点的原理来检测边缘。
在求边缘导数时对每个像素位置计算,在实际应用中用模板卷积近似计算。
微分算子法主要包括一阶微分和二阶微分法。
一阶微分算子方法是基于梯度的方法,在实际应用中用两个模板组合构成梯度算子,由不同大小、不同元素值的模板,产生不同的算子,最常用的有Roberts 算子、Sobel算子、Prewitt算子、Kriseh算子等。
边缘检测和轮廓提取方法和VC++程序
边缘检测和轮廓提取⽅法和VC++程序边沿检测和轮廓提取⽅法和程序1 边沿检测我们给出⼀个模板和⼀幅图象。
不难发现原图中左边暗,右边亮,中间存在着⼀条明显的边界。
进⾏模板操作后的结果如下:。
可以看出,第3、4列⽐其他列的灰度值⾼很多,⼈眼观察时,就能发现⼀条很明显的亮边,其它区域都很暗,这样就起到了边沿检测的作⽤。
为什么会这样呢?仔细看看那个模板就明⽩了,它的意思是将右邻点的灰度值减左邻点的灰度值作为该点的灰度值。
在灰度相近的区域内,这么做的结果使得该点的灰度值接近于0;⽽在边界附近,灰度值有明显的跳变,这么做的结果使得该点的灰度值很⼤,这样就出现了上⾯的结果。
这种模板就是⼀种边沿检测器,它在数学上的涵义是⼀种基于梯度的滤波器,⼜称边沿算⼦,你没有必要知道梯度的确切涵义,只要有这个概念就可以了。
梯度是有⽅向的,和边沿的⽅向总是正交(垂直)的,例如,对于上⾯那幅图象的转置图象,边是⽔平⽅向的,我们可以⽤梯度是垂直⽅向的模板检测它的边沿。
例如,⼀个梯度为45度⽅向模板,可以检测出135度⽅向的边沿。
1.Sobel算⼦在边沿检测中,常⽤的⼀种模板是Sobel 算⼦。
Sobel 算⼦有两个,⼀个是检测⽔平边沿的;另⼀个是检测垂直平边沿的。
与和相⽐,Sobel算⼦对于象素的位置的影响做了加权,因此效果更好。
Sobel算⼦另⼀种形式是各向同性Sobel(Isotropic Sobel)算⼦,也有两个,⼀个是检测⽔平边沿的,另⼀个是检测垂直平边沿的。
各向同性Sobel 算⼦和普通Sobel算⼦相⽐,它的位置加权系数更为准确,在检测不同⽅向的边沿时梯度的幅度⼀致。
下⾯的⼏幅图中,图7.1为原图;图7.2为普通Sobel算⼦处理后的结果图;图7.3为各向同性Sobel算⼦处理后的结果图。
可以看出Sobel算⼦确实把图象中的边沿提取了出来。
图7.1 原图图7.2 普通Sobel算⼦处理后的结果图图7.3 各向同性Sobel算⼦处理后的结果图在程序中仍然要⽤到第3章介绍的通⽤3×3模板操作函数TemplateOperation,所做的操作只是增加⼏个常量标识及其对应的模板数组,这⾥就不再给出了。
图像识别中的轮廓提取算法探索(一)
图像识别中的轮廓提取算法探索引言:图像识别技术作为人工智能领域的重要组成部分,不仅在生活中的安防监控、交通管理等方面发挥着重要作用,还在医疗诊断、无人驾驶等领域具有广泛的应用前景。
其中,轮廓提取算法作为图像处理的基础工具,对于图像识别起着至关重要的作用。
本文将从轮廓提取算法的原理及其应用前景等方面进行探讨。
一、轮廓提取算法原理介绍轮廓提取算法可以视为一种对图像边缘进行识别和提取的过程。
其原理主要基于图像中像素灰度值的变化,通过对灰度梯度的计算和分析,找到图像中相对明暗变化较大的区域,并将其提取为轮廓。
在实际的图像处理中,常用的轮廓提取算法包括Canny算子、Sobel算子等。
其中,Canny算子是一种较为常用的轮廓提取算法,它通过对图像进行多次处理来得到最佳效果。
首先,Canny算子对图像进行高斯滤波,以降低噪声的干扰;然后,通过计算梯度幅值和方向,找到图像中边缘的最大变化位置;最后,通过非极大值抑制和双阈值处理,进一步优化提取的轮廓结果。
二、轮廓提取算法的应用前景1. 图像分割轮廓提取算法在图像分割中具有重要的应用价值。
通过提取图像轮廓,可以将图像中的不同区域进行分离,从而进一步分析和处理。
例如,在医学图像的诊断中,可以通过轮廓提取算法将图像中的病变区域与正常组织进行划分,从而辅助医生进行疾病的诊断和治疗。
2. 物体检测与识别轮廓提取算法在物体检测与识别中也具有广泛的应用前景。
通过提取物体轮廓,可以更加精确地定位和识别物体。
例如,在智能驾驶技术中,可以通过轮廓提取算法将道路标志和行人等物体进行有效区分,从而实现车辆的精确定位和避让操作。
3. 图像重建与增强轮廓提取算法还可用于图像重建与增强。
通过提取图像中的轮廓,可以对图像进行重建和增强操作,从而改善图像的质量和清晰度。
例如,在图像压缩和降噪方面,通过轮廓提取算法可以辅助去除图像中的噪声,提高图像的压缩效果和视觉质量。
结语:随着人工智能技术的不断发展,图像识别的应用前景日益广阔。
数字图像实验 图像的轮廓提取

实验六图像的轮廓
一、实验目的
1.掌握图像轮廓跟踪与提取的基本理论和一般实现方法;
2. 用VC++6.0编程实现图像的轮廓提取。
二、实验内容
1.学习图像的轮廓提取理论和实现方法;
2.用VC++6.0编程实现图像的轮廓提取;
三、实验步骤
(1)启动VC++6.0,打开Dip工程。
(2)在ResourceView栏中→Menu→选IDR_DIPTYPE ,如图
在边缘与轮廓菜单栏下空的一栏中,右键鼠标,在弹出的对话框中选属性properties,在弹出的对话框中,进行如下的设置
(3)右击轮廓提取菜单栏,在建立的类向导中进行如下设置
(4)在DipDoc.cpp中修改相应代码
四、实验结果
五、实验心得及体会
通过做这次实验使我对图像的轮廓提取理论和实现方法有了进一步的认识;实现图像的轮廓提取;通过做实验对所学的知识有许多新的体会和理解。
图像的边缘检测实验报告
图像的边缘检测实验报告图像的边缘检测实验报告一、引言图像处理是计算机科学领域中的一个重要研究方向,而边缘检测作为图像处理的基础任务之一,具有广泛的应用价值。
边缘是图像中灰度或颜色变化较为剧烈的地方,通过检测图像中的边缘可以提取出物体的轮廓、形状等重要信息,从而为后续的图像分析和识别提供基础。
二、实验目的本次实验旨在探究不同的边缘检测算法在图像处理中的应用效果,并通过实验结果分析和比较各算法的优缺点,从而为图像处理领域的研究和应用提供参考。
三、实验方法1. 实验环境:使用Python编程语言,结合OpenCV图像处理库进行实验。
2. 实验数据:选择了包含多种物体和复杂背景的图像作为实验数据,以保证实验的可靠性和准确性。
3. 实验步骤:(1) 读取图像数据,并将其转化为灰度图像。
(2) 对图像进行预处理,如降噪、平滑等操作,以提高边缘检测的效果。
(3) 使用不同的边缘检测算法对图像进行处理,如Sobel算子、Canny算法等。
(4) 分析和比较不同算法的实验结果,评估其优缺点。
四、实验结果与分析1. Sobel算子:Sobel算子是一种基于梯度的边缘检测算法,通过对图像进行卷积操作,提取出图像中的边缘信息。
实验结果显示,Sobel算子能够较好地检测出图像中的边缘,但对于噪声较多的图像效果较差。
2. Canny算法:Canny算法是一种经典的边缘检测算法,通过多步骤的处理过程,包括高斯滤波、计算梯度、非极大值抑制和双阈值处理等,最终得到清晰准确的边缘信息。
实验结果显示,Canny算法能够有效地检测出图像中的边缘,并具有较好的抗噪性能。
3. 其他算法:除了Sobel算子和Canny算法外,还有许多其他的边缘检测算法,如拉普拉斯算子、Roberts算子等,它们各自具有不同的特点和适用范围。
在实验中,我们也对这些算法进行了尝试和比较,发现它们在不同的图像场景下有着各自的优势和局限性。
五、实验总结与展望通过本次实验,我们对图像的边缘检测算法进行了探究和比较。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
实验七图像边沿检测及轮廓提取
1.图像的边沿检测
一、实验目的
1、掌握边沿检测的原理。
2、学习在DSP上实现边沿检测的方法。
二、实验仪器
1、硬件平台:C6000数字图像处理实验箱(型号ZY13DSP23BB)、摄像头、USB连接线。
2、软件平台:Windows98/2000/XP操作系统、Code Composer Studio 2.0 For C6000、ImageRECV 2.0 for ZY13DSP23BB。
三、实验原理
对于给出的一个模板和一幅图像。
不难发现原图中左边暗,右边亮,中间存在着一条明显的边界。
进行模板操作后的结果如下:。
可以看出,第3、4列比其他列的灰度值高很多,人眼观察时,就能发现一条很明显的亮边,其它区域都很暗,这样就起到了边沿检测的作用。
为何会如此呢?仔细看看那个模板就明白了,它的意思是将右邻点的灰度值减左邻点的灰度值作为该点的灰度值。
在灰度相近的区域内,这么做的结果使得该点的灰度值接近于0;而在边界附近,灰度值有明显的跳变,这么做的结果使得该点的灰度值很大,这样就出现了上面的结果。
这种模板就是一种边沿检测器,它在数学上的涵义是一种基于梯度的滤波器,又称边沿算子。
梯度是有方向的,和边沿的方向总是正交(垂直)的。
例如,对于上面那幅图像的转置
图像,边沿是水平方向的,我们可以用梯度是垂直方向的模板检测它的边沿。
再例如,
一个梯度为45度方向模板,可以检测出135度方向的边沿。
在边沿检测中,常用的一种模板是Sobel 算子。
Sobel 算子有两个,一个是检测水平边沿的;另一个是检测垂直边沿的。
与和
相比,Sobel算子对于象素的位置的影响做了加权,因此效果更好。
如下图,图19-1是对图1-2进行Sobel算子处理后的结果图,可以看出Sobel算子确实把图像中的边沿提取了出来。
图19-1 Sobel算子处理后结果
四、实验步骤
1、将光盘上的“examples\EdgeCheck”目录复制到计算机硬盘,去掉目录中所有文件的只读属性;
2、通过USB连接线,将C6000数字图像处理实验箱与PC的USB口相连接,如果PC 提示找到新硬件,则表示连接成功;
3、启动Code Composer Studio 2.0 For C6000;
4、启动ImageRECV 2.0 for ZY13DSP23BB;
5、打开“Project”菜单,选择“Open…”菜单项,找到并打开硬盘上目录“examples\EdgeCheck”,选择EdgeCheck.pjt工程文件;
6、打开“Project”菜单,选择“Rebuild all…”菜单项,编译程序,生成EdgeCheck.out文件;
7、打开“File”菜单,选择“Load program…”菜单项,选择“examples\ EdgeCheck \Debug\EdgeCheck.out”,程序将加载到DSP上;
8、运行:快捷键“F5”或选择“Debug”菜单中的“Run”项;
9、点击PC上的应用程序ImageRECV2.0.exe中的“打开USB设备”,再出现“USB口打开成功”后点击“启动接收”,可以在程序界面中将接收到的图像数据实时的显示出来,按键A1为处理前的图像,A2为处理后的结果,用户可以在ImageRECV2.0.exe程序界面中观测到运行结果并进行比较。
2.图像的轮廓提取
一、实验目的
1、掌握轮廓提取算法的原理。
2、学习在DSP上实现轮廓提取算法的方法。
二、实验仪器
1、硬件平台:C6000数字图像处理实验箱(型号ZY13DSP23BB)、摄像头、USB连接线。
2、软件平台:Windows98/2000/XP操作系统、Code Composer Studio 2.0 For C6000、ImageRECV 2.0 for ZY13DSP23BB。
三、实验原理
轮廓提取的算法非常简单,就是掏空内部点:如果原图中有一点为黑,且它的8个相邻点都是黑色时(此时该点是内部点),则将该点删除。
要注意的是,被处理图像为二值图。
轮廓提取的实例如图20-1是对图1-2进行轮廓提取后的效果图。
图20-1 轮廓提取
四、实验步骤
1、将光盘上的“examples\ Outline”目录复制到计算机硬盘,去掉目录中所有文件的只读属性;
2、通过USB连接线,将C6000数字图像处理实验箱与PC的USB口相连接,如果PC 提示找到新硬件,则表示连接成功;
3、启动Code Composer Studio 2.0 For C6000;
4、启动ImageRECV 2.0 for ZY13DSP23BB;
5、打开“Project”菜单,选择“Open…”菜单项,找到并打开硬盘上目录“examples\Outline”,选择Outline.pjt工程文件;
6、打开“Project”菜单,选择“Rebuild all…”菜单项,编译程序,生成Outline.out文件;
7、打开“File”菜单,选择“Load program…”菜单项,选择“examples\ Outline\Debug\ Outline.out”,程序将加载到DSP上;
8、运行:快捷键“F5”或选择“Debug”菜单中的“Run”项;
9、点击PC上的应用程序ImageRECV2.0.exe中的“打开USB设备”,再出现“USB口打开成功”后点击“启动接收”,可以在程序界面中将接收到的图像数据实时的显示出来,按键A1为处理前的图像,A2为处理后的结果,用户可以在ImageRECV2.0.exe程序界面中观测
到运行结果并进行比较。