PID整定原则调节阀
PID参数调节原理和整定方法
P比例调节
P比例调节特点 比例调节特点
比例调节反应速度快,输出与输入同步, 比例调节反应速度快,输出与输入同步,没有时间滞 其动态特性好。 后,其动态特性好。 比例调节的结果不能使被调参数完全回到给定值, 比例调节的结果不能使被调参数完全回到给定值,而 产生余差。 产生余差。
P的一般选取范围 的一般选取范围
比例带表;值越大,作用越小,范围0-1000 % 积分时间;值越大,作用越小,范围0.1-10000s 微分时间;值越大,作用越大,范围0-10000s
实时曲线观察窗口
CS3000系统PID参数整定方法
无扰动切换
勿扰动切换:控制回路手动(MAN)到自动 (AUT)状态切换时,保证设定值(SV)与测 量值(PV)保持一致或相当。 PID控制只有在控制回路处于AUT状态,也就 是负反馈回路时才有用。
压力调节: 压力调节: 流量调节: 流量调节: 液位调节: 液位调节: 温度调节: 温度调节: 30~70% 60~300% 40~100% 40~80%
I积分调节
I:积分调节
一般用于控制系统的准确性,消除余差。 一般用于控制系统的准确性,消除余差。 对于同一偏差信号,积分常数越大, 对于同一偏差信号,积分常数越大,表示积分 调节作用越强; 调节作用越强;积分常数就表示了积分作用的 大小。 大小。 积分常数的倒数叫积分时间, 表示。 积分常数的倒数叫积分时间,用TI表示。
数的工程整定法
动态特性参数法 稳定边界法 衰减曲线法 经验法
实际生产过程中,不可能让生产工艺产生较大波 动,以上方法不通用也不实际,顾本文主要对经 验法详细介绍
PID参数的工程整定法
经验法 即先确定一个调节器的参数值P和I, 通过改变给定值对控制系统施加一个扰动, 现场观察判断控制曲线形状。若曲线不够 理想,可改变P或I,根据控制过程曲线, 经反复凑试直到控制系统符合动态过程品 质要求为止,这时的P和I就是最佳值。
请问如何用pid控制阀门的开合度?

请问如何用pid控制阀门的开合度?过程控制的四大参数,温度、压力、流量、液位。
因此,对每种参数进行测量和调节不仅确保安全生产,还提高产品质量及经济效益。
在生产过程控制中,控制阀是很常见的控制元件。
作用是什么?由定位器发出控制信号,来改变被调参数,使被调参数控制在工艺要求范围内,从而实现生产过程自动化。
PID液位调节阀控制这个控制系统有四个环节,PID控制器、调节阀、被控对象(容器)、检测变送器(液位计),从而构成一个单回路控制系统。
其中核心环节是PID控制器,在连续时间控制系统中,PID控制器是应用最广泛的,技术也成熟。
因此,长期以来也就形成了经典的结构,参数整定方便、结构更换灵活,满足一般的控制要求是没任何问题的。
例如DCS控制系统就能够实现PID控制阀门的开合度。
上图就是用DCS组态做的一个液位单回路组态,它就是PID液位控制器。
然后再把液位变送器的模拟量输入组态做好即可。
上图中的回路1位号可以自行定义,是控制液位就是LIC后面连接数字,是温度控制就是TIC后面连接数字。
代表的是某某指示控制器,例如LIC就是液位指示控制器。
回路1输入是检测变送器的模拟量输入位号,输出位号是模拟量输出位号。
因此,只要把液位单回路组态好了,然后编译下载即可,在监控画面就能够看到组态好的操作界面。
在操作界面里面有手自动、PID、报警设置、手工置值等功能。
如果是手动控制,其实与PID没有任何关系,只有自动控制才与阀门有关。
这里关键的是PID参数整定的好坏,直接关系到被调参数是否控制在工艺要求范围内。
所以,PID参数没有整定好,投自动是无法进行的,于是不得不用手动控制阀门开合度。
PID控制过程,就是现场的液位变送器不断的给PID控制器反馈信号,然后根据工艺要求的值与反馈过来的值做差,差值大于零它就发出控制指令使调节阀开合度大点,差值小于零它就发出控制指令使调节阀开合度小点。
因此,能否使液位控制精准,不光是PID控制器的功劳,还离不开检测变送器的功劳,现场液位变送器测量不准那么自动控制肯定也不精准。
PID电动压力调节阀控制系统设计

PID电动压力调节阀控制系统设计PID电动压力调整阀掌握系统设计一般一般的电动调整阀、气动调整阀则需要配套(气动配定位器)、压力变送器、PID调整仪一套组合来调整掌握管道或储罐所需要压力值。
原理是压力变送器将压力信号转换为识别的电流信号,依据压力转换的电流信号来掌握气动、电动压力调整阀的开度大小,进而掌握压力。
电动调整阀由电动执行器与调整阀阀体两部分组成,通过接收自动化掌握系统的信号来驱动阀门,转变阀芯和阀座之间的截面积大小掌握,管道介质的流量、温度、压力等工艺参数,来实现远程自动掌握。
4-20mA之间不同的信号数值对应不同的调整阀信号开度,依据自己的工况介质选择适用的流量系数,就可以算出调整阀每个开度所对应的流量、压力值,从而达到调整阀对工况介质的调整要求。
PID电动压力调整阀掌握系统设计产品特点:a.智能型调整阀易维护、电气接线便利。
b.牢靠;非侵入式设计。
c.液晶显示、中英文操作界面。
d.体积小、重量轻、低噪音。
e.傻瓜式"向导"设置功能、调试简洁。
f.线性光电隔离技术,掌握信号,调整信号带隔离互不影响。
g.自动/手动间无扰切换,执行机构产生故障时报警并自动切断电机电源。
重新上电方可恢复工作。
PID电动压力调整阀掌握系统设计产品应用:智能电动调整阀结构紧凑、重量轻、体积小。
它采纳直流无刷电机以及齿轮箱减速,具有噪声低。
后还采纳电动里面的霍尔传感器来检测位置,寿命长,简化了机械结构。
电气掌握部分采纳模块化设计,由驱动单元、掌握单、液晶显示单元,非侵入式的触摸按键单组成,具有操作简洁,接线便利。
转矩掌握以及行程限位都通电子电路来实现,从而实现无需开盖调试。
智能型调整阀应用于如发电、化工、石油、冶金、轻工、锅炉、城市供水、智能大厦等工业过程自动化系统中。
PID电动压力调整阀掌握系统设计根据下面步骤开头操作。
一、使用蒸汽场合时的操作:1、拧紧注液口螺钉。
2、缓慢开启调整阀前后截止阀。
PID参数调节原理和整定方法(1)

PID参数调节原理和整定方法
CS3000系统PID参数整定方法
增大比例系数P一般将加快系统的响应,在有静 差的情况下有利于减小静差,但是过大的比例系 数会使系统有比较大的超调,并产生振荡,使稳 定性变坏。
增大积分时间I有利于减小超调,减小振荡,使 系统的稳定性增加,但是系统静差消除时间变长。
因此希望优秀的工艺人员与用心的仪表人 员共同努力,共同提高我们国际化的大石 化自控率,同时也为减轻大家的劳动强度。
PID参数调节原理和整定方法
CS3000 仪表面板
位号
位号注释
功能块模式 测量值
位号标志 报警状态
设定值
输出值
输出指针 测量值棒状图
工程单位
测量值上限 报警设置 设定值指针
测量值下限
PID参数调节原理和整定方法
CS3000 仪表面板
输出值指针 设定值指针 功能块模式 报警状态 位号 位号注释 位号标志 测量值棒状图 测量值上下限 工程单位
P比例调节
P:比例调节
在P调节中,调节器的输出信号u与偏差信号e成比例, 即 u = Kc e (kc称为比例增益)
但在实际控制中习惯用增益的倒数表示 δ =1 / kc (δ称为比例带)
不同的DCS使用不同的参数作为P的调节参数,以CS3000 为例,选用δ 比例带为调节参数,单位%。可以理解为:
P:比例带;值越大,作用越弱。单 位:%
I:积分时间;值越大,作用越弱, 单位:分钟(m)
D:微分时间;值越大,作用越强, 单位:分钟(m)
PID参数含义均与CS3000一致,但要 注意积分和微分时间,为分钟。
手动/自动 切换
基本调节规律及PID参数整定
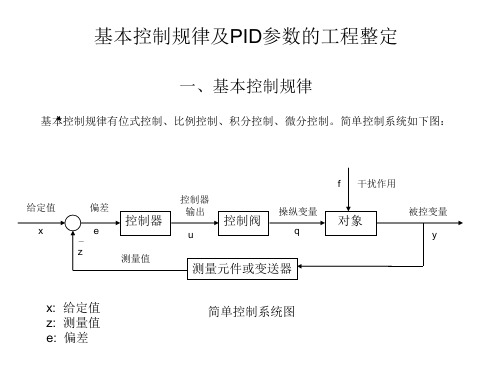
1.比例控制
在控制系统中,阀门开度的改变量与被控量(如液位)的偏差成比例,这 就是比例控制。
u(t)=a/b ×e(t) e: 杠杆测量端的位移,即液位变化量 u: 杠杆控制端的位移,即控制阀阀杆的位移量
a
u
o
be
a.b: 分别为杠杆支点至两端的距离。
u(t)=kp×e(t) kp是一个可调的放大倍数,改变杠杆支点,便改变 了kp的大小,kp称之为比例增益,它表示比例增益的强弱,
(2)对于PI控制器,先置Ti=∝,按纯比例作用整定比例度δ,使之达到4:1衰减 过程曲线,然后,将δ放大10%~20%,将积分时间由大到小逐步加入,直至 获得4:1衰减过程。
(3)对于PID控制器,将Ti=0, 先按PI作用凑试法整定好δ、Ti参数,然后将δ减 低到比原值小10%~20%的位置,Ti也适当减小后,再把Td由小到大地逐步 加入,观察过渡过程曲线,直到获得满意的过渡过程曲线为止。
(1)将Ti=∝,Td=0,在纯比例作用下系统投入运行,按经验法整定比例度,直 至出现4:1衰减过程为止,此时的比例度记为δs,衰减振荡周期为Ts。
r设定值
y
4
1
Ts
t
t
to
to
4:1衰减过程曲线
(2)根据已测得的δs,Ts值,按表所列经验关系计算出控制器的整定参数值。
4:1过程控制器整定参数表
参数范围 控制系统
参数范围 控制系统
液位 压力 流量 温度
控制器整定参数经验范围
δ%
20~80 30~70 40~100 20~60
Ti/min
— 0.4~3 0.1~1 3~10
Td/min
PID回路整定详细说明

仪表控制说明及PID整定方法化工乙烯仪表-李恒超主要内容一、仪表控制说明1、单回路控制说明2、复杂控制说明二、PID整定方法1、PID整定方法2、PID整定举例三、自动控制回路参数波动原因分析1、工艺操作系统引起参数波动分析2、仪表和调节阀的特性引起参数波动分析3、机泵控制的波动原因分析主要内容一、仪表控制说明1、单回路控制说明1.1 单回路的结构与组成1.2 明确自动控制的目的1.3 被控变量的选择1.4 控制变量的选择1.5 控制质量1.6 滞后1.7 举例与仿真1.8PID的正反作用2、复杂控制说明2.1 前馈控制2.2 串级控制2.3 均匀控制2.4 分程控制2.5 比值控制2.6 选择控制2.7 三冲量控制2.8 耦合控制二、PID整定方法1、PID整定说明1.1 PID回路阶跃响应性能指标1.2PID设置面板1.3 PID参数功能1.3.1 增益K作用对调节过程的影响1.3.2 积分作用对调节过程的影响1.3.3 微分调节D说明1.4 PID参数的整定1.4.1 测试阶跃响应法1.4.2 PID参数的整定步骤说明1.4.3 PID参数整定经验说明1.4.4 PID参数整定方法二2、PID整定举例2.1 PID参数的形象说明2.2 PID参数仿真曲线举例说明2.3 PID整定参数举例分析说明2.4 PID参数整定总结三、自动控制回路参数波动原因分析1、工艺操作系统引起参数波动分析1.1 精馏塔的典型控制1.2 反应器的控制2、仪表和调节阀的特性引起参数波动分析2.1 流量计的量程比、流速,对测量的影响2.2 调节阀的流量特性和可调比2.3 提高调节阀使用寿命的常见方法3、机泵控制的波动原因分析3.1 对离心泵的控制3.2 对计量泵的控制3.3 对变频泵的控制一、仪表控制说明\1.单回路控制说明1.1 单回路的结构与组成由一个被控对象、一个测量变送器、一个控制器和一个执行机构(控制阀)所组成的闭环控制系统。
阀门pid调节参数设置技巧

阀门pid调节参数设置技巧以下是 9 条相关内容:1. 嘿,你知道吗?阀门 PID 调节参数设置可是有大学问的!就像给机器调配出最完美的“魔法药水”。
比如说,你想让水流速度稳稳当当,那参数可就得设置得恰到好处,不然就乱套啦!2. 哇塞,这个阀门PID 参数设置技巧可太重要啦!就好比是驾驭一辆跑车,得精准地控制速度和方向。
你想想如果设置不对,那不就跟开车跑偏了一样糟糕呀!3. 嘿呀,我跟你说哦,一定要注意阀门 PID 调节参数设置的细节!这就好像是在雕琢一件艺术品,每一个小动作都能决定成品是不是精美。
像调整温度控制的时候,参数不精细怎么行呢!4. 哎呀,你可别小瞧这阀门 PID 调节参数设置技巧!这可是让机器乖乖听话的“秘密法宝”呢。
好比是训练小动物,得当的设置才能让它做出正确的动作呀!5. 哇哦,学会了这些阀门 PID 调节参数设置技巧,那可真是如鱼得水呀!就像在迷宫中找到了正确的路线一样惊喜。
你看,精确控制流量不就靠这个嘛!6. 嘿,有没有发现阀门PID 调节参数设置的神奇之处呀?就跟变魔术似的,能让一切都那么恰到好处。
比如在工业生产中,设置好了参数,那效率蹭蹭涨啊!7. 哇,真的得好好钻研阀门 PID 调节参数设置技巧呢!这简直是开启高效运行的钥匙。
你想想,要是参数不对,那不就像钥匙插错了孔,怎么也打不开呀!8. 嘿呀嘿呀,掌握这些阀门 PID 调节参数设置技巧,那可是太有用啦!就像有了一双灵活的手,可以随意塑造想要的结果。
像是让压力稳定下来,不就是靠这一手嘛!9. 总之,阀门 PID 调节参数设置技巧是非常关键的,必须要重视并好好运用呀!。
pid控制蒸汽调节阀
pid控制蒸汽调节阀
我现在想用温度来控制蒸汽调节阀的开度从而蒸汽的开度,首先我用231读取pt100测量得到的温度值,对应aiw0,我用232模拟量输出0到20ma的电流(aqw0)去控制调节阀,我用向导建立了个pid算法,模拟量输入模拟量输出,我这个过程有没错?我的模拟量输入是不是aiw0,模拟量输出是不是aqw0?还有就是我的调节阀是带反馈信号的(4ma~20ma),我的反馈信号送入231处理之后,对应aiw2,我的aiw2信号,要送到哪里去处理,是不是我还要建个pid 算法,然后输入量用aiw2,输出量还是aqw0?
图片说明:1,pid
最佳答案
首先的是你的过程没有错,但是你的输入和输出至于是aiw0还是aqw0这要取决你cpu是什么型号的如果是224xp 的接231就是aiw4,而输出就应该是aqw2,至于你的反馈模拟量地址就不说了,要以此类推,反馈量的处理还是需要的,通常是与你的输出做比较,这个看你的要求精度%比,如果与你的要求相差太大就应该报警还是采取什么措施,这个要看你的设计思想了。
离散PIDPID参数整定

U(s)
其离散位置式算式: U(k) aU(k-1) (1 a)U(k)
其中: a Tf T0 Tf
k
U(k) kce(k) ki e(i) k0[e(k) e(k-1)] i0
其离散增量式等式 U(k) aU(k - 1) (1 a)U(k)
其中: U(k) k ce(k 1) k ie(k) k D[e(k) 2e(k - 1) e(k - 2)]
液体压力:调节近似流量调节 蒸汽压力:调节近似温度调节 温度系统:存在传递滞后和较大的时间常数,所以引入微分作用 注意:这种按照受控变量类型来选择控制器参数的做法,都是对 典型的过程特性而言的。
表1-4 经验法整定参数的参考范围
系统
温度 流量 压力 液位
比例度 20~60 40~100 30~70 20~80
exp( / 1 2 ) 1/ n
n exp(2 / 1 2 ) 1/ n
9、对不稳定系统,Kc越小则越稳定
一、经验凑试法:
按照人们长期从事过程控制的经验来调整控制器参数 流量系统:宜用PI控制,往往需要精确控制 液位系统:宜用纯比例,比例度要大 压力系统:液体压力,气体压力,蒸汽压力
参数
Ti min 3~10 0.1~1 0.4~3
Td min 0.5~3
整定步骤: (1)纯比例下调出4:1衰减振荡 (2)如需消除余差,则适当增加比例度,引入积分作用 (3)如需要再加入微分:允许适当减小比例度和积分时 间 不同参数对过渡过程曲线的影响: (1)比例度过小、积分时间过小、微分时间过大所引起 的振荡的区别
Ui (k)
ki e(k )
U i
(k)
ki
e(k )
e(k 2
高压差调节阀pid设计定值

高压差调节阀PID设计定值1. 简介高压差调节阀是一种用于控制流体压差的装置,广泛应用于工业领域中的流体控制系统中。
PID控制是一种常用的控制算法,通过对系统的测量值与设定值之间的差异进行反馈调节,实现对系统的稳定控制。
本文将详细介绍高压差调节阀PID设计定值的过程,包括相关概念的介绍、PID参数的选择方法、调试过程中的注意事项等内容。
2. 相关概念在进行高压差调节阀PID设计定值之前,我们首先需要了解几个相关概念:2.1 高压差调节阀高压差调节阀是一种用于调节流体压差的装置,通过改变阀门的开度来控制流体通过阀门的流量,从而实现对流体压差的调节。
2.2 PID控制PID控制是一种常用的控制算法,它由比例(P)、积分(I)和微分(D)三个部分组成。
PID控制通过对系统的测量值与设定值之间的差异进行反馈调节,实现对系统的稳定控制。
•比例(P):比例控制是根据系统的偏差大小进行调节,比例增大可以使系统响应更快,但可能引起超调。
•积分(I):积分控制是根据系统的偏差累积值进行调节,可以消除系统的稳态误差。
•微分(D):微分控制是根据系统的偏差变化率进行调节,可以提高系统的稳定性和抗干扰能力。
2.3 设计定值设计定值是指在进行PID控制器参数设计时所确定的参数数值。
设计定值的选择对于系统的控制性能有着重要的影响,需要根据具体的系统特性和要求进行选择。
3. PID参数选择方法进行高压差调节阀PID设计定值时,需要选择合适的PID参数。
下面介绍几种常用的PID参数选择方法:3.1 经验法则经验法则是一种常用的PID参数选择方法,根据经验公式直接计算PID参数的数值。
常用的经验公式有:•经验法则1:Kp = 0.5Ku,Ti = 0.5Tu,Td = 0.125Tu•经验法则2:Kp = 0.6Ku,Ti = 0.5Tu,Td = 0.125Tu其中,Kp为比例系数,Ti为积分时间,Td为微分时间,Ku为临界增益,Tu为临界周期。
PID回路整定简易说明
• PID控制器输出中的积分部分与偏差的积分成正比。因为积分时间TI在积分项的分母中,TI越小,积 分项变化的速度越快,积分作用越强。
3.D-微分作用
有经验的操作人员在温度上升过快,但是尚未达到设定值时,会根据温度变化的趋势,预感 到温度将会超过设定值,出现超调。于是手动减少给煤量。
这相当于开车看到红灯时,考虑到汽车减速的时间,需要一定的提前量一样。
三、举例说明PID控制器的基本原理
PID属于无模型控制,调节三个环节的参数P、I、D会产生什么影响根据控制对象的不同也会有很大差别。 假设有一个水箱液位控制系统,从空箱补水至某个高度,我们能控制的是比例水龙头的开关大小。
简单的数学模型就是: △MV=(PV-SP)/PB 只需要一个比例调节 也就是说,开始比例水龙头开大点,快灌满的时候关小一点,到了设定高度全关。
二、举例说明PID三参数
第一部分 举例说明
PID是比例、积分、微分的简称,PID控制的难点不是编程,而是控制器的参数整定。参数整定的关 键是正确地理解各参数的物理意义。
PID控制的原理可以用操作人员对热油炉炉温的手动控制来理解。 有经验的操作人员手动控制热油炉的炉温,可以获得非常好的控制品质,PID控制与人工控制的控 制策略有很多相似的地方。
四、举例说明PID反馈控制的动作曲线
此处的比例是比例增益,中控的是比 例度
比例增益值越大,作用越强,比例度 刚好相反 此处KP越大,相当于中控的比例度P值 越小
五、PID回路的参数整定方法
目前PID回路整定基本以经验法为主
• 在调试中最重要的问题是在PID回路性能不能令人满意时,知道应该调节哪一个参数,该参数应该 增大还是减小。
• 在调好比例控制的基础上再加入积分作用,但积分会降低过渡过程的衰减比,则系统的稳定程度也会降低。 为了保持系统的稳定程度,可增大调节器的比例度,即减小调节器的放大倍数。这就是dlr在整定中投入积 分作用后,要把比例度增大约20%的原因。其实质就是个比例度和积分时间数值的匹配问题,
调节阀与调节器配合与PID整定

调节器工艺阀门当PV↑使偏差e=PV-SV﹥0 时A过程要求阀开度↑B过程要求阀开度↓FC 气开阀正作用反作用FO 气关阀反作用正作用一、调节器、过程特性和调节阀的作用方式配合说明:1、通常,调节阀的气开、气关有工艺安全条件事先选定。
2、再假定阀门定位器和执行器构成调节阀正作用。
如果为反作用,表中关于调节器作用方式结论取反。
3、工艺过程确定,阀门气开、气关方式也确定,无论阀门作用方式如何,都可以通过调节器作用方式选择来适应自动调节过程中的负反馈闭环控制系统来满足工艺控制。
4、对于调节器来说,按照统一的规定:4.1、如果e﹥0,调节器输出增加,调节器放大系数Kc为负,则该调节器称为正作用调节器;4.2、e﹥0,调节器输出减小,Kc为正,则该调节器称为反作用调节器。
5、关于工艺过程通常有几类常用控制调节需求,现归纳如下,便于识别。
5.1、本阀后压力、加热过程、流量调节和流入容器液位调节归纳为一类,即为:B过程;5.2、本阀前压力、冷却过程和流出容器液位为另一类,为A过程。
调节器调节阀过程特性SV e- PV变送器a) SV-设定值;b) PV-过程值;c) e-偏差,e=PV-SV;d) KC-调节器放大系数;e) KV-调节阀作用特性;f) KP-过程特性;g) KT-变送特性;(通常为正)对于单回路调节系统,当KC*KV*KP*KT = -PV才构成负反馈系统。
带入g),此判别式简化为:KC*KV*KP = -PV。
所以,工艺过程确定、调节阀FC或FO一经选定,只有调整调节器正反作用方式来满足控制要求。
单元仪表调节器与DCS系统调节器改变调节器极性是非常方便的。
至此,同行纠缠已久的此问题达到了简化处理。
如果是串级控制回路,选择主回路控制器的正反作用时将副回路看作是一个设定值不变的单回路,用与单回路中确定调节器正反作用同样的方法进行确定。
二、关于PID整定在选定了一组控制回路作用方式配置之后,要想取得满意的调节效果,下面的工作就是整定调节器的调节的PID参数。
调节阀与液位pid调试方法

调节阀与液位pid调试方法
PID调试方法是一种常用的控制算法,可以用于调节阀和液位的控制。
以下是PID调试的一般步骤:
1. 确定系统接线:首先需要检查系统的接线,确保系统的反馈为负反馈。
例如,在电机调速系统中,输入信号为正,要求电机正转时,反馈信号也为正(PID算法时,误差=输入-反馈),同时电机转速越高,反馈信号越大。
2. 初始参数调整:将比例系数P设为一个较小值,积分系数I和微分系数D 设为0。
然后根据被控过程的特性,逐步增加P的值,观察系统的响应情况。
通过不断调整P的值,找到使过程变量稳定在目标值附近的最佳P值。
3. 调整积分系数I:根据响应速度和稳定性的需求,逐步增加积分系数I的值,找到最佳I值。
在调整I值时,需要注意避免积分饱和问题,即避免由
于积分作用过强而导致系统超调或者积分过慢而导致系统调节时间过长。
4. 调整微分系数D:微分系数D的作用是预测系统的变化趋势,通过提前
调整控制量来减小系统的超调量。
可以根据系统的响应情况逐步增加D的值,找到最佳D值。
5. 反复调整和观察:通过反复调整P、I、D的值,观察系统的响应情况,
不断优化控制参数,直到找到使系统达到最佳控制效果的参数组合。
对于液位控制,具体的PID调试方法可能因不同的液位系统和控制要求而有所不同。
但是总体上,上述步骤可以作为液位PID调试的参考方法。
需要注意的是,在实际应用中,需要根据具体的液位系统和控制要求进行适当的调整和优化,以达到最佳的控制效果。
PID参数调节原理和整定方法

PID参数调节原理和整定方法PID控制器是一种常用的闭环控制系统,其控制器的输出值由三部分组成:比例项(P)、积分项(I)和微分项(D)。
PID控制器通过不断地调节这三个参数,来实现对被控对象的控制。
PID控制器通过不断比较被控对象的输出值和设定值之间的差异(称为误差),来决定控制器的输出值。
PID控制器的输出值可以表达为:输出值=Kp*(比例项)+Ki*(积分项)+Kd*(微分项)其中,Kp、Ki和Kd分别为PID控制器的参数,需要根据实际系统进行调整。
当被控对象的输出值与设定值相差较大时,比例项可以起到快速调节的作用,使得控制器的输出值快速地接近设定值。
积分项可以消除系统存在的静差,提高系统的稳定性。
微分项可以防止系统过冲或震荡,提高系统的响应速度。
PID控制器的参数整定是一个复杂且经验性的过程,需要根据具体的被控对象、控制要求和系统特性进行调整。
下面介绍几种常用的参数整定方法:1. 经验法:根据经验公式,设置参数的初始值,并对系统进行试控,根据实际效果进行逐步调整。
常用的经验公式有Ziegler-Nichols方法、Chien-Hrones-Reswick方法等。
2.约束实验法:通过对系统施加一定的约束实验,如阶跃响应法、频率响应法等,从实验数据中提取系统的模型参数,并根据提取的模型参数进行参数整定。
3.数值方法:通过数值计算方法,如根据系统的传递函数进行数值求解,得到系统的频率特性响应,再根据一定的准则进行参数整定。
4.自整定方法:根据控制系统的自整定能力,通过在线或离线的自整定算法,自动寻找最优参数。
常见的自整定方法有遗传算法、模糊逻辑控制、神经网络等。
在实际的参数整定过程中,需要根据实际情况选择合适的方法,并进行反复测试和调整,直到达到满意的控制效果。
总结:PID参数调节原理是通过比例、积分和微分三项的组合来控制被控对象。
参数整定方法可以采用经验法、约束实验法、数值方法和自整定方法。
PID调节原理与PID参数整定方法

PID调节原理与PID参数整定方法PID调节原理与参数整定方法是自动控制系统中常用的调节算法和方法之一、PID调节器是一种反馈调节控制器,利用当前的偏差值、偏差累积值和偏差变化率来产生控制输出,进而改变被控对象的状态,使其尽可能地满足设定值。
PID调节器由三个部分组成:比例(P)调节器、积分(I)调节器和微分(D)调节器。
P调节器根据偏差值来产生控制信号;I调节器根据偏差累积值来产生控制信号;D调节器根据偏差变化率来产生控制信号。
这三个调节器的输出都与偏差成比例,然后将它们相加得到最终的控制输出。
PID控制器的数学表达式为:u(t) = Kp * e(t) + Ki * ∫e(t)dt + Kd * de(t)/dt其中,u(t)是控制输出,Kp、Ki和Kd是调节器的增益参数,e(t)是偏差,t是时间。
参数整定是指选择合适的PID控制参数以实现系统良好性能。
对于PID参数整定,常用的方法有以下几种:1.经验法:根据经验和实际应用中相似系统的参数进行估计和调整。
这种方法简单易行,但对于不同系统的参数整定效果不一致。
2. Ziegler-Nichols方法:此方法通过实验获取系统的临界增益(Kcr)和临界周期(Pcr),然后根据不同的整定规则选择PID参数。
常用的整定规则有:P控制器(Kp = 0.5 * Kcr)、PI控制器(Kp = 0.45* Kcr,Ki = 1.2 / Pcr)和PID控制器(Kp = 0.6 * Kcr,Ki = 2 / Pcr,Kd = 8 / Pcr)。
3.最小二乘法:通过最小化系统的输出与设定值之间的误差,来确定合适的PID参数。
这种方法需要进行大量的计算,适用于精确调节和要求高性能的系统。
4.频响法:通过系统的频率响应曲线来进行参数整定。
此方法需要对系统进行频率扫描,可以获得系统的幅频特性和相频特性,然后根据相应的调节规则选择PID参数。
总结来说,PID调节原理是利用当前的偏差值、偏差累积值和偏差变化率来产生控制输出;而PID参数整定方法可以通过经验法、Ziegler-Nichols方法、最小二乘法和频响法等多种方法来选择合适的参数,以实现系统的稳定性和性能要求。
PID参数调节原理和整定方法
实时曲线观察窗口
CS3000系统PID参数整定方法
无扰动切换பைடு நூலகம்
勿扰动切换:控制回路手动(MAN)到自动 (AUT)状态切换时,保证设定值(SV)与测 量值(PV)保持一致或相当。 PID控制只有在控制回路处于AUT状态,也就 是负反馈回路时才有用。
CS3000系统PID参数整定方法
改变模式
手动
自动
串级
CS3000 调整窗口
进行PID参数调节时,建议按下保留按钮 ,以方便在切换画面后观察保留的趋势 ,PID参数调整完后必须取消。 要进行PID参数调节,首先必须要有权限 。显示“=”表示可以进行参数修改,显 示“:”表示不能对参数进行修改。默 认值班长有权限修改。
比例带表;值越大,作用越小,范围0-1000 % 积分时间;值越大,作用越小,范围0.1-10000s 微分时间;值越大,作用越大,范围0-10000s
CS3000系统常用PID参数
P (%) 20~60 30~70 20~80 40~100 I D (s) (s) 180~600 3~180 24~180 60~300 6~60
温度 压力 液位 流量
IA 系统PID参数整定
要进行PID参数调节,首先必须要有权限 ,默认情况下值班长有权限修改。
CS3000系统PID参数整定方法
串级回路PID参数调整
因为串级调节系统一般应用于容量滞后较大的 场合,必须加微分,所以主调一般取PID,而 副调一般取P就可以了。但是副参数是流量, 压力时,可加一定的I作用,这里也不是为了 消除余差,只是流量,压力付对象时间常数太 小,导致副调节器的P不能太小,调节作用弱, 加上积分是为了使副参数偏离给定值太远。
pid调节参数整定方法及设置技巧
pid调节参数整定方法及设置技巧PID=port ID,在STP(生成树协议)中,若在端口收到的BPDU 中BID和path cost相同时,则比较PID来选择阻塞端口。
数字电视复用系统名词 PID(Packet Identifier)在数字电视复用系统中它的作用好比一份文件的文件名,我们可以称它为“标志码传输包” 。
工程控制和数学物理方面PID(比例积分微分)英文全称为Proportion Integration Differentiation,它是一个数学物理术语。
PID由8位端口优先级加端口号组成,端口号占低位,默认端口号优先级128。
ID调节(PID regulating)经典控制理论中控制系统的一种基本调节方式。
是具有比例、积分和微分作用的一种线性调节规律。
PID调节(PID regulating)经典控制理论中控制系统的一种基本调节方式。
是具有比例、积分和微分作用的一种线性调节规律.PID调节的作用是将给定值r与被控变量的实际量测值y的偏差。
-r _y的比例、积分和微分信号综合成控制量来对被控过程进行控制。
这一控制量的表达式为其中K。
为比例系数,T;为积分系数,1‘a为微分系数。
加大比例系数K。
可以减小系统的静差,但当KP 过大时,会使系统的动态品质变坏,引起被控量振荡,甚至导致闭环系统不稳定。
积分系数T;大说明积分作用弱,反之则说明积分作用强。
增大T,将减慢消除静差的过程,但可以减小超调,提高稳定性。
微分系数Ta增大,则微分作用加强,有助于减少超调,克服振荡,使系统趋于稳定,加快系统的响应速度,减小调整时间,从而改善系统的动态性能。
有众多的模拟的或数字的PID调节器产品可供选用。
用户只要根据实际应用pid调节参数整定方法及设置技巧PID是比例、积分、微分的简称,PID控制的难点不是编程,而是控制器的参数整定。
参数整定的关键是正确地理解各参数的物理意义,PID控制的原理可以用人对炉温的手动控制来理解。
PIDPPT课件
三、 PID参数整定
工程整定参数方法 主要临界比例带法、衰减曲线法、反应曲线 法和经验法(现场凑试法)。在我们平台上 通常采用的是经验法。
8
三、 PID参数整定
如果过程的动态特性变化,例如可能由于 负载的变化引起系统动态特性变化,PID参数 (Kp,Ki,Kd)就重新整定。
9
三、 PID参数整定
演讲人:XXXXXX
时 间:XX年XX月XX日
18
在工程实际中,应用最为广泛的调节阀 控制规律为比例、积分、微分控制,简称 PID控制,又称PID调节。PID控制器问世 至今已有近70年历史,它以其结构简单、 稳定性好、工作可靠、调整方便而成为工 业控制的主要技术之一。
4
二、 PID控制的原理
比例(P)调节作用:是按比
例反应系统的偏差,系统一旦出现偏差, 比例调立即产生调节作用以减少偏差。
2
一、 控制系统简介
一个控制系统包括控制器、传感器、变 送器、执行机构、输入输出接口。不同的控 制系统,其传感器、变送器、执行机构不同。 比如压力控制系统要采用压力传感器。温度 控制系统的传感器就是温度变送器。我们平 有压力、温度、液位控制系统。执行机构都 采用的是fisher公司的调节阀。
3
二、 PID控制的原理
结束语
当你尽了自己的最大努力时,失败也是伟大的, 所以不要放弃,坚持就是正确的。
When You Do Your Best, Failure Is Great, So Don'T Give Up, Stick To The End
17
谢谢大家
荣幸这一路,与你同行
It'S An Honor To Walk With You All The Way
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
PID整定原则
先是比例后积分,最后再把微分加
曲线振荡很频繁,比例度盘要放大
曲线漂浮绕大湾,比例度盘往小扳
曲线偏离回复慢,积分时间往下降
曲线波动周期长,积分时间再加长
曲线振荡频率快,先把微分降下来
动差大来波动慢。
微分时间应加长
理想曲线两个波,前高后低4比1
一看二调多分析,调节质量不会低
λ法整定控制回路PID参数
一、 PID控制器的基本原理
1、比例控制器(P)
比例控制器的传递函数为Gc(S)=Kp,其作用是调整系统的开环比例系数,提高系统的静态精度,加快系统的响应速度,但对于高于二阶的系统,Kp过大会造成系统的不稳定。
2、积分控制器(I)
积分控制器的传递函数为Gc(S)=1/TiS,Ti为积分时间。
它的作用是消除系统的静态误差,但积分控制有时会改变系统的稳定性,降低系统响应速度。
3、比例加积分控制器(PI)
比例积分控制器的传递函数为Gc(S)=Kp(1+1/TiS),由于它有Kp和T i两个可调参数,因此可兼有比例和积分两种控制器的优点,使系统
既稳定又有较好的静态和动态性能,这种控制是工程上用途最为广泛的。
4、比例加微分(PD)
比例加微分控制器的传递函数为Gc(S)=Kp(1+TdS),Td为微分时间。
它所产生的控制作用不仅反映了系统的静态误差,同时还反映了误差信号的变化率,因此微分使控制信号提前作用,使系统的响应振荡减轻,过渡过程加快,对系统的稳定性有利。
5、比例加积分加微分控制器(PID)
PID控制器的传递函数为Gc(S)=Kp(1+1/TiS+TdS),兼具比例积分和微分控制器的优点,是应用很普遍的一种控制器。
二、λ法整定回路:
λ法整定法起源于1968年,由Dahlin最先提出,可参考以下文献:Dahlin E.B.,Designing and Tuning Digital Controllers,Instr and Cont Syst,41(6),77,1968。
以下针对自平衡系统和积分系统分别给出例子,以供参考。
自平衡系统PID整定(流量,组分,温度,大部分压力)
1、回路置手动,OP改变5%(改变幅度可以同操作工商量),当PV 达到新的稳态值,OP回到原来的值。
2、从1中得到的趋势图上,估计过程增益,滞后时间和过程时间常数。
3、从表一中选择最符合1中得到的响应的简单模型。
4、选择所想要的闭环时间常数λ,通常的规则:λ比滞后时间与过程时间常速的和要大。
5、在3中所选模型的基础上计算控制器增益。
把这些数输入控制器,回路投自动,改变设定值或负荷观察响应。
如需要就调整比例增益修改响应速度。
例一:λ整定一流量回路。
PV~过程变量=流量,变送器量程是0-2000gpm,
计算过程增益:Kp=ΔPV/ΔOP=150/5=30
计算过程常数:
过程时间常数:τ=10s(PV从650到650+63.2%ΔPV(约745)的时间)
计算滞后时间:θ=0s
计算比例增益:Kc=τ/[Kp*K*(λ+θ)]=10/[30*0.05 *(20+0)]=0.333
τ=10s,Kp=30,K=100/R=100/2000=0.05
λ:闭环时间常数,在这里选20s
计算积分增益:Ti=τ/60=10/60=0.167 (分钟)(相当于每分钟6次)
例二、λ法整定一液位控制回路(积分过程)
积分过程的整定方法类似自平衡过程,不同的是过程变量不能达到稳态。
计算过程增益:
过程增益:Kp=ΔPV/[(ΔOP*Δt)]=10/[10*120]=0.0 0833
滞后时间:θ=0 s
计算比例增益:100/ALV
在此对ALV作简要解释:ALV是允许的液位变化的简称,液位控制的主要目标是允许罐能缓冲突然的流量变化,保证下游变量的扰动最小。
ALV指的就是在正常操作中允许的液位偏离设定值的最大变化,它是用%比来表示的,尽量使用最大的ALV,这样罐就能够吸收扰动。
例如,如果液位设定值是60%,ALV选择25%,那么,即使流量负荷发生了从0%到100%的阶跃,液位将保持在35%~85%。
令ALV=33.3%,则Kc=100/ALV=100/33.3=3.0
λ=ALV/[50*Kp]=33.3/(50*0.00833)=8 0 s
注意:此处λ不是任意选的,而是选择合适的ALV来计算λ。
计算积分时间:Ti=λ/30=80/30=2.67 (分钟) (相当于0.375次/分钟)
表一简单过程模型的整定公式
对液位控制来说,λ=ALV/(50*Kp)
ALV:允许的液位变化(%) Ti:积分时间 Kc:比例增益
θ:滞后时间(秒)λ:闭环时间常数(秒)
Kp:过程增益 K=100/R
τ=过程时间常数 R:变送器在工程单位下的量程微分增益(分钟):P/6(P:period)
表二、常见回路的性质。