VirtuoZo_Sat卫星影像处理系统
全数字摄影测量系统(VirtuoZo)数字化成图过程论文

全数字摄影测量系统(VirtuoZo)数字化成图过程摘要:随着社会的进步,计算机技术和数字图像处理技术的发展,使人类社会已经进入了数字化信息时代。
摄影测量已由原先的模拟摄影测量和解析摄影测量,发展到今天的数字摄影测量。
全数字摄影测量系统(virtuozo)不仅在国内已成为各测绘部门从模拟摄影测量走向数字摄影测量更新换代的主要装备,而且也被世界诸多国家和地区所采用。
关键词: virtuozo、空中三角测量、数字地面高程模型dem中图分类号:g623.58 文献标识码:a 文章编号:随着信息技术和计算机技术的迅猛发展,数字摄影测量已取代传统的模拟摄影测量和解析摄影测量,使摄影测量进入数字化时代。
全数字摄影测量系统(virtuozo)全是利用数字影像或数字化影像完成摄影测量作业。
由计算机视觉(其核心是影像匹配与影像识别)代替人眼的立体量测与识别,不再需要传统的光机仪器。
从原始资料、中间成果到最后产品都是数字形式,克服了传统摄影测量只能生产单一线划图的缺点,可生产出多种数字产品,如数字高程模型、数字正射影像、数字线划图、景观图等,并提供各种工程设计所需的三维信息、各种信息系统数据库所需的空间信息。
国家测绘局对各省级测绘局向数字化规模生产的转轨实施资金、技术上的大力扶持政策,有力地推动数字摄影测量系统在各地方局的推广应用,数字摄影测量系统的应用使得传统摄影测量生产发生了深刻的变革。
一、数字摄影测量系统的组成数字摄影测量系统主要由两部分组成:一部分是影象获取装置与成果输出设备;另一部分(也是其核心部分)是一台计算机、数字摄影测量软件及其它外围设备。
virtuozo全数字摄影测量系统由以下几个部分组成:高精度影象扫描仪。
sgi o2工作站(virtuozo unix工作站版本)512mb内存,mips r5000,rev2.1的cpu,主机速度200mhz,2l”彩色立体显示器,高档微(virtuozo nt版本)512mb内存,cpu为pⅱ-mmx300,21”彩色立体显示器,24bit真彩色(分辨率为1280×1024),20gb硬盘。
GLONASS系统概述
GLONASS系统概述全球轨道导航卫星系统(Global Orbiting Navigation Satellite System,Global'naya Navigatsionnaya Sputnikovaya Sistema, GLONASS)是前苏联为满足授时、海陆空定位与导航、大地测量与制图、生态监测研究等建立的,1978年开始研制,1982年10月开始发射导航卫星。
自1982年至1987年,共发射了27颗GLONASS试验卫星。
于1996年初投入运行使用。
GLONASS提供两种导航信号:标准精密导航信号(SP)和高精密导航信号(HP)。
SP 定位与授时服务适用所有GLONASS 的国内用户。
其水平定位精度为57-70米(99.7%置信),垂直定位精度为70米(99.7%置信),速度矢量测量精度15 cm/s (99.7%置信),时间测量精度在1 mks (99.7%置信)。
1构建GLONASS的目的①航空、航海交通安全与管理;②大地测量与制图;③地面交通运输实时监控;④移动目标的异地时间同步;⑤生态监测、野外搜寻与救生。
2 GLONASS系统的组成同GPS一样,GLONASS定位系统也由三个部分组成(参见图6.1),即(1)GLONASS卫星(空间部分);(2)地面监控系统(地面监控部分);和(3)GLONASS接收机(用户部分)。
图1 GLONASS系统组成2.1GLONASS卫星及其星座GLONASS 由24 卫星组成。
它们分布在3个轨道上,每个轨道有8颗卫星,轨道上卫星间距45度(图6.2、表6.1)。
●轨道平均高度:19100 km●轨道倾角为64.8●卫星运行周期:11 时15分GLONASS上述空间配置,保证地球上任何地点、任何时刻均至少可以同时观测5颗卫星。
图2 GLONASS 卫星星座表1 GLONASS系统参数1982年10月,第一代Glonass卫星首次由质子号运载一箭三星发射入轨,卫星采用三轴稳定体制,整量质量1400kg,卫星寿命5年(图6.3)。
基于无控制点的空中三角测量研究
基于无控制点的空中三角测量研究本文结合多项无控测图作业生产实践经验,以某国产卫星三线阵影像为例,梳理总结基于无控测图空中三角测量流程,对不同加密检查方法进行了分析研究,对卫片无控测图具有借鉴和指导意义。
标签:三线阵影像;无控测图;空中三角测量1研究背景由于某国产卫星实现了相机几何参数在轨标定技术、多功能EFP光束法平差等多项关键技术,因此三线阵CCD相机立体影像实现了地面5 m的分辨率,无控条件下平面精度优于10 m,高程精度优于6 m。
根据表1无控测图精度指标相关要求,该卫星三线阵影像符合无控测制5万地形图相关要求。
无控测图的测区多是高山区、海岛区等控制资料难以获取的区域,因此无控测图的精度难以保证。
本文结合多项无控测图作业生产实践经验,通过对3轨6景三线阵影像进行无控空中三角测量处理试验,梳理总结处理流程和检查方法,提高无控测图的精度和质量,对卫片无控测图空中三角测量具有借鉴和指导意义。
2无控测图空中三角测量流程无控测图空中三角测量的基本思路是先对卫星原始影像进行自由网平差,再利用现有资料进行多项加密检查,确保空中三角测量精度,提高测绘地理信息产品的精度。
此次试验作业硬件为联想P700数字摄影测量工作站,作业软件为兆格公司(原适普公司)卫星影像空中三角测量软件VirtuoZoSat。
该卫星三线阵影像无控测图空中三角测量流程如图1所示。
2.1资料分析(1)影像分析。
检查软件是否支持下发的卫星影像处理,影像覆盖范围的漏洞,影像云量的面积等。
(2)高程异常改正。
卫星影像的高程系统一般是大地高程系统,需要在空中三角测量处理时引入高程异常改正文件,获取正常高的立体模型,从而获取正常高的作业产品。
兆格软件支持的高程异常改正文件为bin格式,原点位置为左下角点。
2.2工程建立根据成果的数学基础和影像覆盖范围,确定加密工程椭球坐标系、投影系统、中央经线、东偏,引入转换后的高程异常改正文件。
2.3影像输入及命名选择引入影像类型,输出格式,影像是否需要旋转、缩放。
virtuozo实验报告

竭诚为您提供优质文档/双击可除virtuozo实验报告篇一:virtuozo实习报告Virtuoso实习报告一.实习目的:了解VirtuoZonT系统的运行环境及软件模块的操作特点,了解实习工作流程,从而能对数字摄影测量实习有个整体概念。
完成原始数字影像格式的转换。
掌握创建/打开测区及测区参数文件的设置。
掌握参数文件的数据录入。
通过对模型定向的作业,了解数字影像立体模型的建立方法及全过程,并能较熟练地应用定向模块进行作业,满足定向的基本精度要求。
掌握核线影像重采样,生成核线影像对。
掌握匹配窗口及间隔的设置,运用匹配模块,完成影像匹配。
掌握匹配后的基本编辑,能根据等视差曲线(立体观察)发现粗差,并对不可靠区域进行编辑,达到最基本的精度要求。
掌握Dem格网间隔的正确设置,生成单模型的Dem。
·掌握正射影像分辨率的正确设置,制作单模型的数字正射影像。
通过Dem及正射影像的显示,检查是否有粗差。
掌握拼接区域的选定及确定拼接产品的路径。
掌握Dem拼接及自动正射影像镶嵌。
分析拼接精度。
理解数据格式输出的意义。
了解VirtuoZonT系统的数据格式输出的具体操作。
通过对实习成果的分析,了解数字产品的基本质量要求。
总结实习中出现的问题以及实习成果的不足之处,并能分析其原因。
二.实习原理:利用Virtuozo的强大功能进行有关的影像匹配及编辑工作。
具体流程如下:定向模块(包括自动内定向,自动相对定向,半自动绝对核线重采样Dem、显示DemDem拼接、自动镶嵌正射影像图廓整饰成果分析三。
实习内容:1.数据准备原始数字影像即是数字摄影测量所用的原始资料,有数字影像和数字化影像(影像的数据格式有多种(一般常用的有tif格式等)。
这些影像格式VirtuoZonT系统不能直接引用,必须转换为VirtuoZonT所认识的Vz格式。
参数文件的设置与基本数据的录入一定要正确,否则将无法进行后继的处理,或者将出现错误。
创建测区即是为将要进行测量的区域创建一个工作区目录。
摄影测量系统分类与介绍

一VirtuoZo NT 系统国内单机VirtuoZo NT 系统是适普软件有限公司与武汉大学遥感学院共同研制的全数字摄影测量系统,属世界同类产品的五大名牌之一。
此系统是基于WindowsNT的全数字摄影测量系统,利用数字影像或数字化影像完成摄影测量作业。
由计算机视觉(其核心是影像匹配与影像识别)代替人眼的立体量测与识别,不再需要传统的光机仪器。
从原始资料、中间成果及最后产品等都是以数字形式,克服了传统摄影测量只能生产单一线划图的缺点,可生产出多种数字产品,如数字高程模型、数字正射影像、数字线划图、景观图等,并提供各种工程设计所需的三维信息、各种信息系统数据库所需的空间信息。
VirtuoZo NT 不仅在国内已成为各测绘部门从模拟摄影测量走向数字摄影测量更新换代的主要装备,而且也被世界诸多国家和地区所采用。
(本段摘自《VirtuoZo七步教学手册》)VirtuoZo软件的诞生,张祖勋院士功不可没。
可以说,整个软件的设计与开发,张院士起到带头作用。
张院士回忆起了将VirtuoZo推向世界的过程。
他告诉大家,VirtuoZo的推广和应用,彻底简化了数字摄影测量的仪器设备,改变了摄影测量的“贵族”身份。
过去只有极少数院校能进行摄影测量教学,而有了VirtuoZo,目前已有约40所院校能进行这项教学。
它还促使中国摄影测量生产方式完全改变,生产规模扩大,产值大幅度提高,促进了摄影测量的跨越式发展。
2002年国际摄影测量与遥感学会原主席、东京大学教授村井俊治在日本《测量》杂志撰文《中国的IT行业登陆日本》称:“最先商品化的软件是张祖勋教授开发的利用数字影像匹配进行数字摄影测量的软件,名称叫VirtuoZo,这个软件就是一个数字摄影测量的优秀产品。
我想我们已经到了该向中国学习的时候了。
”谈及此,张院士的脸上洋溢着无限的骄傲与自豪——不是因为个人的成绩与荣誉,而是为中华民族的扬眉吐气。
VirtuoZo NT 基本软件有:〃解算定向参数〃自动空中三角测量〃核线影像重采样〃影像匹配〃生成数字高程模型〃制作数字正射影像〃生成等高线〃制作景观图、DEM 透视图〃等高线叠加正射影像〃基于数字影像的机助量测〃文字注记〃图廓整饰二JX—4A(DPW)国内单机武汉大学于20世纪70年代中期在仅有256K内存的NOVA计算机上开展了全数字化自动测图系统的研究。
适普卫星影像处理方案
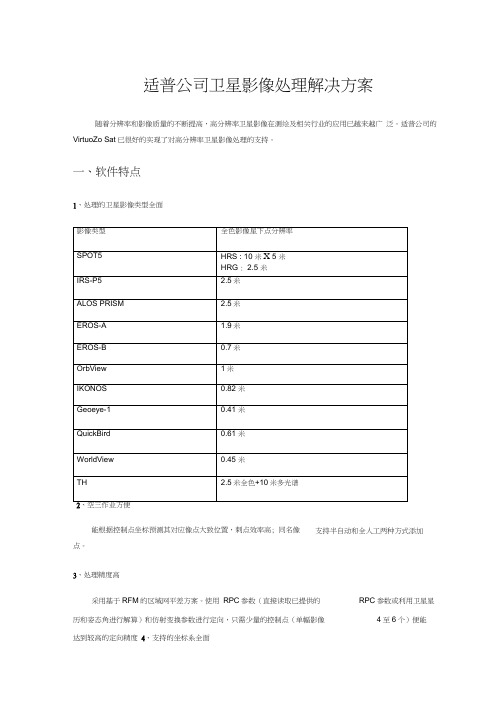
适普公司卫星影像处理解决方案随着分辨率和影像质量的不断提高,高分辨率卫星影像在测绘及相关行业的应用已越来越广泛。
适普公司的VirtuoZo Sat已很好的实现了对高分辨率卫星影像处理的支持。
一、软件特点1、处理的卫星影像类型全面能根据控制点坐标预测其对应像点大致位置,刺点效率高; 同名像支持半自动和全人工两种方式添加点。
3、处理精度高采用基于RFM的区域网平差方案。
使用RPC参数(直接读取已提供的RPC参数或利用卫星星历和姿态角进行解算)和仿射变换参数进行定向,只需少量的控制点(单幅影像4至6个)便能达到较高的定向精度4、支持的坐标系全面目前支持的坐标系包括 WGS84北京54坐标系、西安80坐标系、中国2000坐标系及自定义坐标系。
二、数据准备卫星影像的原始数据包括影像文件和PRC 参数文件,不同的传感器的 PRC 文件名也有差异。
影像类型 RPC 文件匚 INAGERY.TIFMETADAIA,D[M_ BAWDA.RPC h- BaridA.tifQuickBrid WorldView -*.rpb08JAN06D230iS-PlES-00572S933010_01_P001.ATT _ 08JANO&023015*P1ES-&0572S?330LO_01_F>D01EPHOBJANO&023O15-PlBS-C»5728933aW^l_P<M)l.GEQ 08JAN06023015-PlES-a0572S933010_01_™i.JMD _ 08JAN06023O15-PlBS-[»5728932010_01_P0OLRPB 曲 08JANO&023015-P1BS-005728933010_01_P001STE 固 O8JANOfr023O15*PlBS-(»5728933Ol{}_Ol_P0OL71F08JANa&023015-PlBS-&0<5728933aiO 01 POOL7IL1* — —兰 08JAN06022015-PlB£-(»572BQ3a010_01_P001.J(ML _08JANft&023015-PlBS-00572S933010_01_P001_FtEADME 匚 QSJA 旳驀O1Q_Q1」PQM-B 尺OW$EOrbView -*.pvlfc 3V0510^3F>(X>OOg45271A5200001001010_()06ia590.tif L. 3VO51023PO000945271 AS200001001010_00&l&?BO,pvl样例(必备文件组成)Spot5METADATA.DIMIKONOS,GeoEy e-1,P5****_rpc.txtALOS -_RPC-**** (PRC文件分块存储,由summary.txt统一记录,引入影像时请选择summary.txt)IM G-03-ALPS MB044052 925-O1B1—R IM G-04-ALPSMB044052925-01B1_BIMG -05-ALPS MB044052 925-01Bl_B IMG-06-ALPtMB044052^5-01Bl_B LED-ALPSMBD44052925-01B1_BR PC-03-ALPS M &CH4O52925-01Bl_B RPC-M-ALPEMB(M4n52925-OlBL_B RPC-05-ALPSMBQ44D52925 O1B1_BR PC-06-ALPS M &04405 292 5-01B L_ & RPC-AI_PSMB044052»25-01B1_B SLinnmary.txtSU^-ALF>SMB044^52925-01E1_BTRL-ALPSMB0440539^5-01B1_BVOL-ALPSMED44052925'01B1 BEROS *.rpc*.pass >.MBTVe2161&63-lAUbrt k t;f _ MBT1^2161S€3.pa» 匚MaTl.e2161063.fpcTH SXZ+GFB+DGP*.rpc B_SXZ_1_O8 14-136 .RAW B_£XZ_l_08-14-134.rpt B_SXZ_l_08-14-l36.)cmlB_DG P_08_014_13 6.中cB_DGP_O0_O14_136.T1FB_DGP_0S_014_136.xmlB_GFB_OB_014_136.rpc B.GFe^0S_O14_136f TIF BG FB 08 014 136jcml样例RPC 文件:LINE_OrF: 4-5985,82 pixels SAMP^OFF :+5952.4G pixe 丄sLATOFF : +30,57563548 degreesLCNG_OrF: 4-10^1 ・ 40477032 decrees HE IGHTOFF : +700.000 meters LINESCALE: +9231■口5 pixels SAMP^SCALE :+9BS6.S1 pixelsLATSCALE: +0.18000000 degrees LCNGSCALE : +0.19500000 degreesHEIGHT SCALE: 4-500.000 meters +1.958730240027644E-04 -N ・ 670 61^1667 630373 E-01 一&・307726057910314E-01 -2.18350596C8S0724E-03 +5 ・ 3 6599508^56^1947£-02 +5*a 12167121516405E-D3 +2.86S9113993S9206E-02 +6.69522S9D3757319E-03 十6.61426909057129&E-02-2 ・103313692078135E-04 -5 *913 63 463252 9452£-06 -1・3S1651962131069E-04+7 ・ 640599772S565E-04 -6.867529676123316E-O5 -2 ・21083294596713OE-OSLINE_NUM_COEFF_19: +1・ 40405217287949BE-05 LINE^NUH^COEFF^ 0: -1.866DB49B3053924E-07 LINE -DEN -COEFF -1: 4-1. OOOOOOOOOOOOOOOE+OO 一马.329588103769903E-02^1*037352298081656E-D1 -3.422620810240033E-02 +3 ・044483466701602E-04■+■2.40043S758372939E-04 -1T 311?81726180937E-0S +1 ・727701314203965E-04 -8.926932463381600E-04+9,2683539^55290^5^-05 -2»072Se5532705432E-07 -1.12193423S451222E-07 -l,411625901401355E-06 -1.721794D3239252lE^OG+1.012777647990264E-06-1・908842672488080E-07 +□.454120828626039E-0S +1.703707091275895E-07 +3,3800^156^38714^2£-07 -2.50051682287119BE-08+1 * LINE NUM COEFF 10: +7,4653248266679O3E-0S LINENUKCOEFFlLINE^NUM^COEFF^S LINE 【NU 匸C OEFF 【3 LINE -NUK -COEFF _4 LINENUHC0EFF5 L INE 【NU 匸 8EFF 【5 LINE^NUM^COEFFj LINE^NUK^COEFF^8 LINE -NUK _COEFF'gLINE_NUH_COEFf _11: LmEjjU 匸 COEFFp : LINENUMCOEFF13:LINE_NUH_C0EFF_14:LINE -K(JK -COEFF -i5:-1.435521O637B1549E-0S -1.5£7807590026760£-04 LINENUMCOEFFl6: LINE]NU 匸 C OEFF^l?: LINE -NUK -COEFF _18:LINE_DEN_COEFf_2 :LIN E [D E N [8EFF 【3 :LINED EMC OE FF_4:LINE^E^Z C OEFF^S :LINE^EN^COEFF^G : LIN E 3 EN^C OE F F^7:LTNE [DE :N [8EFF [B :LINE^EN^COErF^ :“NE [DEN [COEFF ]ICI LTNE ]DEN [COEFF ] 11LINE^^EN^COEFF^iSLINE [DEN [COEFF [:L 3LINE^DEN^COEFF^HLINE^DEN^COEFF^IS LINE 【DE 匸 COEFF 【16LINE^DEN^COEFF^l? LINKED EN^COEFF^ISLIN E [D E 匸C0EFF 【19 LDJE [DEN 3:OEFF ) 0soPNUHCOErri : 匸匚0EFF 【2 : SAMP -N(JK -COEFF~3 :458288823041920E-03 +7・988261872506678E-D1 -1.952847294878630E-01三、处理流程处理流程图如图1所示建立工程 并设置工程参数4D 生 产1、 新建工程建立卫星影像处理工程,定义坐标系并设置影像匹配、 DEM 、DOM 和等高线相关参数; 2、 数据准备包括引入影像数据和RPC 参数。
virtuoZo,武汉适普数字摄影测量系统操作流程

2. 引入影像
SUPRESOFT
选择“文件--引入--影像文件”;见图5: 在弹出的对话框中填入相应的参数,如相 加参数文件、影像是否反转、转换的原始 数据格式类型、影像的扫描分辨率(若不 知道原始影像的扫描分辨率,可在此栏中 输入参数-1,部分原始影像的扫描分辨率 可直接从影像中获取)等参数,然后载入 相应的原始影像文件,编辑影像的输出路 径,即可开始转换;见图6:
SUPRESOFT
7. 设置成果输出参数
选择“设置--DEM参数”;见图16 在弹出的对话框中将缺省显示DEM的输出路径及文件名为 “模型名\product\模型名.DEM”,输出的DEM范围为当前 型的核线影像范围(设定范围为(-999999,999999)∽(999999,999999)),DEM格网间距及旋转角与测区所设一 致,缺省输出DEM保留一位小数(整型存储格式),参与 输出DEM的为当前模型;用户可根据实际情况选择其他的 输出路径及输出文件名、设定DEM的输出范围、格网间距 及旋转角、DEM的小数保留位数(浮点型存储格式;最多 仅保留7位小数)、选择多个模型生成DEM(此时会在每 个模型下生成当前模型的DEM,然后对每个模型的DEM进 行自动拼接,生成一个拼接后的DEM);见图17
3. 建立模型
SUPRESOFT
打开主界面程序,选择菜单“文件--打开模型”; 见 图7 在弹出的对话框中输入相应的模型名,即可新建一个 模型,也可选择一已存在的模型打开;见图8 若为新建一模型,输入相应的模型名确认后,将出现 如图9所示的对话框;填入相应的模型路径、左右影像 文件路径及文件名、临时文件存放路径、产品文件存 放路径等参数后确认即可; 模 若要对建立的模型参数进行修改,可选择“设置-- 型参数”;见图9′,将弹出如图9所示对话框,可对此模 型参数进行修改;
浅谈使用Virtuozo3.7.5全数字摄影测量系统的几点体会

果, 遵循核线原理对左右原始影像沿核线方 向保持 不
图 1 系统 用户 界面
Fi. Th s r it ra e o h y tm g 1 eu e n e f c ft es se
变 , l 向进 行 核线重 采 样 , 样 所 生 成 的核 线 影像 保 在 , 方 这
S .h a UIYu c u n
( io igS reiga dM a pn si t, iz o 2 0 3 C ia La nn u v y n p igI tue Jn h u1 10 , hn ) n n t
Ab t a t s r c :Vi u z sa d g tlp o o r mmerc s se w t i h i tl g n e  ̄ o o i ii h t g a a t y tm i h g n el e c .T i p p rd s u s d t e n w a d d f n t n i e f i h i h s a e ic se h e d e u c i a t s o ol i Vi u z . . n h o v n e c sb o g tb h e e so y c mp rn t t lwe e in 3 2 —3 5  ̄ o o 3 7 5 a d te c n e i n e r u h y t e n w v r in b o a ig wi i o r v r o . 4 h s s .. Ke r s Vi u z ;mo u e y wo d : r o o t d l ;ADS 0 4
见解 。
1 V ru z . . ito o3 7 5的概 要 介 绍
V ̄ oo.. 是 一个 全 软件化 设计 、 iuz 75 3 功能 齐全 和高 度
VirtuoZo3.7安装与激活图文教程(附下载)
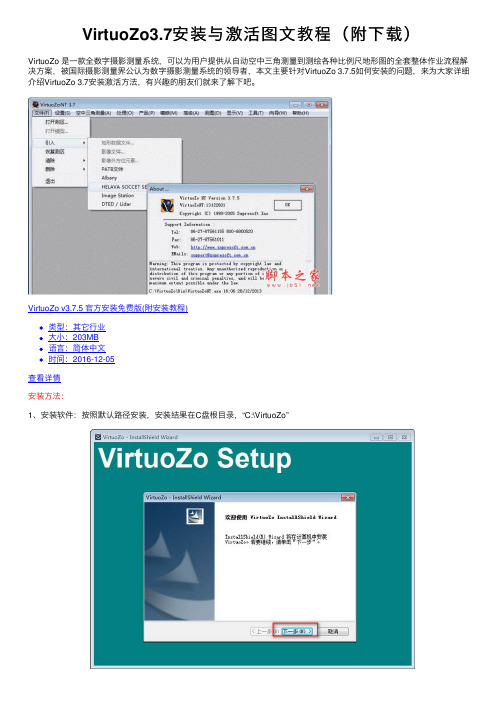
VirtuoZo3.7安装与激活图⽂教程(附下载)
VirtuoZo 是⼀款全数字摄影测量系统,可以为⽤户提供从⾃动空中三⾓测量到测绘各种⽐例尺地形图的全套整体作业流程解决⽅案,被国际摄影测量界公认为数字摄影测量系统的领导者,本⽂主要针对VirtuoZo 3.7.5如何安装的问题,来为⼤家详细介绍VirtuoZo 3.7安装激活⽅法,有兴趣的朋友们就来了解下吧。
VirtuoZo v3.7.5 官⽅安装免费版(附安装教程)
类型:其它⾏业
⼤⼩:203MB
语⾔:简体中⽂
时间:2016-12-05
查看详情
安装⽅法:
1、安装软件:按照默认路径安装,安装结果在C盘根⽬录,“C:\VirtuoZo”
2、安装加密狗驱动:安装软件成功后会提⽰“是否继续安装加密狗驱动?”,选择是,默认安装。
加密狗安装驱动程序放在C:\VirtuoZo\Tools\DongleDrivers\InstWiz3.exe,⽤户也可⾃⾏找到安装。
3、请将获取的加密狗插在计算机的USB接⼝上,双击⽬录C:\VirtuoZo\Tools\showID.exe程序,检测加密狗号,例如:SPid=3-9604130000002738 。
4、请将获取的与加密狗号对应的许可⽂件(*.lic)放在软件安装⽬录下,例如:将SPid=3-9604130000002738.lic放在C:\VirtuoZo⽬录下与Bin⽬录同级。
5、启动VirtuoZoADS主程序,单击“查看—Licence状态”,弹出Licence状态检测对话框,显⽰ADS的相关模块为绿⾊的勾即可使⽤。
注意:
1、加密狗号与许可⽂件要对应⼀致
2、安装⽬录下只有⼀个许可⽂件。
采用IKONOS影像在VirtuoZo软件下进行1:1万立体测图研究

文 章编 号 : 1 6 7 2 - 3 7 9 1 ( 2 0 1 3 ) 0 3 ( c ) 一 0 0 6 2 — 0 2
本 试 验 测 区 位 于 贵 阳 市 花 溪 区 磊 庄 机 本次实验 在花 溪选 了一个试验 区 , 用 覆盖 面 积 约 为4 9 k m 。 测 区 内道 路 I KON O S 影像 建 立 了立 体 像对 , 在此 立 体 像 场 附 近 , 交 通较 为 发 达 , 有l 0 6 省 道 和 贵 昆 铁 对基础上进行l : 1 万立体测图, 进 行 了精 度 成 网 , 路 贯穿 其 中 , 居 民地 较 多 , 均沿道路 分布 , 统计 , 并得出结论 。 水系有松柏 山水库和天河 潭等 , 地 貌 以 丘 陵 为主 , 植被 多 为 旱地 和 稻 田 。 1 资 料分析 1 . 3影 像资料 分析 1 . 1 I K O N O S卫星影像 简介 本次影 像的拍摄时 间为2 0 l 0 年3 月2 6 I KO N O S 卫星 由美国S p a c e i ma g e 公司 发 资料较新 , 影 像纹 理 清 晰 , 无云遮挡 , 能 射, 卫 星 飞 行高 度 为 6 8 0 k m, 每 天绕 地 球 l 4 日, 圈。 卫 星 上装 有 柯 达 公 司制 造 的 数 字 相 机 , 满足 l : 1 万立 体 测 图要 求 。 相机的扫描宽度为 l l k m, 可采 集 l m分辨 率 的 全 色 波 段 黑 白 影 像 和4 m分 辨 率 的 多 2 试验技术流程 波段影像 , 并 可 提 供立 体 影 像 。 I KONO S 卫 星 立 体 影 像 测 图 的 生 产 流 不 同 之 I KO NO S 提 供 的 卫星 遥感 影 像 数 据 一 程 和 传 统 肮 片 测 图 的 流 程 差 不 多 , 般 为经过处理的 “ 准核线” 数据 , 立 体 像 对 处 在 于 I KONO S 卫 星 影像 是 经 过 处 理 的 核 可通 过 卫 星 参 数RPC 文件定向, 重 的 重 叠 度约 为 1 0 0 %, 灰 度 取 值为 l 1 b i t s , 以 线影 像 , t i f f 1 6 b i t s 格 式 记录 , 每 个像对 除 两个 t i f f 影 叠 度大 , 影像覆盖面广。 我 们 选 用适 普 公 司 像数据外 , 还 有 两 个 对 应 的 卫 星 轨 道 参 数 的V i r t u o Z o 软件 进行 生产 实 验 , Vi r t u o Z o 带 C 文件 , 文件 名为 “ } 一 r p c . t x t ” ( 其中 为相 应 的 有 专 门的 高分 辨 率 卫 星影 像 处 理 模 型RP 影像名) , 记 录 了 卫星 获 取 影 像 时 的 轨 道 参 模 块 。 在V i r t u o Z o 下 采 用 的 试 验 技 术 流程
VirtuoZo全数字摄影测量系统系列产品及模块
VirtuoZo全数字摄影测量系统系列产品及模块VirtuoZo全数字摄影测量系统系列产品及模块1. VirtuoZo Classic--全数字化摄影测量软件标准版2. VirtuoZo Lite--全数字化摄影测量软件普及版3. VirtuoZo Education--全数字化摄影测量软件教育版4. VirtuoZo OrthoKit--制作正射影像软件5. VirtuoZo MapEngine--数字化测图软件6. VirtuoZo MSMapper--MicroStation 测图接⼝软件7. VirtuoZo EPMapper--电⼒选线与量测三维可视化平台8. VirtuoZo OrthoMapper--正射影像数字测图软件9. VirtuoZo CADMapper--AutoCAD 测图接⼝软件10. VirtuoZo AAT--⾃动空中三⾓测量系统-----------------------------------------------------------------------------------------------VirtuoZo Classic--全数字化摄影测量软件标准版VirtuoZo标准版,⽣产DEM、DOM、 DLG 和 DRG 产品的全数字摄影测量软件。
其中还包括基于第三⽅DEM数据(USGS格式)制作正射影像、基于正射影像的数字测图以及与 Microstation 接⼝的⽴体数字测图和正射影像测图等功能。
VirtuoZo Lite--全数字化摄影测量软件普及版VirtuoZo 系列产品功能⾮常强⼤,同时也需要较⾼的硬件配置做⽀撑,但是对于部分教育⽤户,他们不需要系统达到数据⽣产的标准,对于去野外作业的⽤户,他们携带⾼配置的计算机⾮常不⽅便,只需要携带笔记本更为合适。
针对这⼀情况,适普公司开发了 VirtuoZo Lite,该版本是 VirtuoZo 的普及版本,提供 VirtuoZo 标准版本的所有功能,⽤户可使⽤传统的红绿眼镜进⾏⽴体观测。
全数字摄影测量系统VirtuoZo的认识及使用
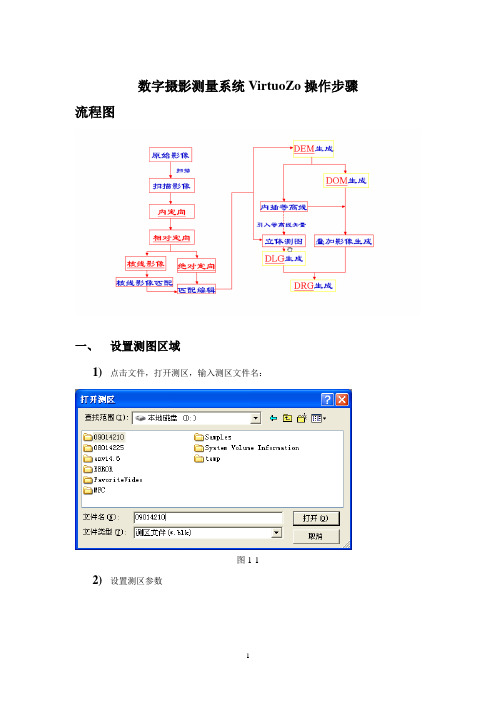
数字摄影测量系统VirtuoZo操作步骤流程图
一、设置测图区域
1)点击文件,打开测区,输入测区文件名:
图1-1
2)设置测区参数
图1-2
二、设置模型参数
1)影像数据的导入
图2-1
2)模型参数的设定:
图2-2 三、内定向:
1)左影像内定向:
图3-1-1
图3-1-2
2)人工方式,自动方式进行调整
图3-2
3)右影像内定向(图略)
四、相对定向:
1)处理—>模型定向—>相对对象
图4-1 2)自动相对定向
图4-2
五、绝对定向:
1)寻找相应的控制点,对控制点进行精确调整
图5-1 六、核线重采样
图6-1
七、影像匹配
图7-1
八、生成DEM
图8-1
九、生成正射影像
图9-1 十、生成等高线
图10-1
十一、等高线正射影像
图11-1 十二、立体影像
图12-1
图12-2 十三、正射影像
图13-1
十四、等高线影像
图14-1
十五、等高线叠合影像
图15-1
十六、透视显示
图16-1
十七、立体显示
图17-1
图17-2。
VirtuoZo操作指南(试用版)
全数字摄影测量软件VirtuoZo操作指南2007年7月西南交通大学测量系目 录序言 (4)第1章数字摄影测量理论介绍 (5)1.1 数字摄影测量基本概念 (5)1.2扫描影像空间分辨率介绍 (8)第2章数据准备 (10)2.1 数字化影像 (10)2.2 控制点资料 (11)2.3 相机检校文件 (14)2.4 特别说明 (14)第3章立体模型建立 (15)3.1测区、模型建立及参数设置 (15)3.1.1新建测区 (15)3.1.2参数设置 (16)3.1.3创建立体模型 (18)3.2模型定向 (19)3.2.1内定向 (19)3.2.2相对定向 (20)3.2.3 刺入控制点 (21)3.2.4绝对定向 (22)3.3生成核线影像 (23)3.4影像匹配及编辑 (23)3.4.1影像匹配 (23)3.4.2匹配结果编辑 (24)第4章产品生成及编辑 (27)4.1 DEM生成与编辑 (27)4.1.1生成DEM (27)4.1.2 DEM编辑 (27)4.1.3显示DEM成果 (30)4.2制作正射影像和生成等高线影像 (31)4.2.1制作正射影像 (31)4.2.2正射影像修补 (32)4.2.3生成等高线 (36)4.2.4等高线和正射影像叠合 (36)4.2.5显示各成果 (36)4.3 DEM拼接和影像镶嵌 (38)4.3.1 DEM拼接 (39)4.3.2影像镶嵌 (40)4.3.3成果显示 (40)第5章数字化测图 (43)5.1地物量测 (43)5.1.1新建矢量文件 (43)5.1.2房屋量测 (45)5.1.3道路量测 (46)5.1.4点状地物量测 (47)5.1.5地物矢量信息编辑 (48)5.2地貌测图 (49)5.2.1引入等高线文件 (50)5.2.2修测等高线 (50)序言数字摄影测量是一门实践性很强的学科,通过理论学习和操作实践,有助于学生掌握数字摄影测量的基本原理和处理方法。
遥感信息在水工环中的应用分析

遥感信息在水工环中的应用分析摘要:遥感技术是一门新兴的测量技术,具有信息量大、操作简易、造价低、耗时少的优点,在水文地质、工程地质以及环境地质的监测中应用很广泛。
本文首先探讨了水工环领域遥感信息技术的应用现状,然后重点探讨了遥感信息在环境地质监测中的应用技术。
关键词:遥感;水工环;应用中图分类号:f407.1 文献标识码:a 文章编号:一、水工环领域遥感应用技术的发展现状经过近30年的应用研究,遥感技术依靠传感器技术、图像处理技术及计算机技术的提高,在水工环领域的应用取得了长足的发展。
遥感水文地质开始逐步形成一门独立的学科。
传统的遥感水文地质着重于水文地质测绘系统中定性特征的解释和特殊标志的识别,近期的研究则扩展到应用热红外和多光谱影像进行地下水流系统内的地下水分析和管理,目前研究的重点集中到了空间补给模式、污染评价中植被、区域测图单元参数的确定和空间地下水模型中地表水文地质特征的监测。
纵观国内外遥感技术在水工环领域的一些应用成果,可把近年来遥感技术的应用发展现状概括为以下几个方面:1.从目视解译发展到计算机辅助解译如线性影像计算机自动判释专家系统及土地利用(分类)计算机判读模型以及机助信息提取与制图系统等。
由于影像的多解性及识别系统的不完善性,虽还需要投入一定的人力工作,但已大幅提高解译工作效率。
2.从几何形态解译到充分利用光谱信息过去的多光谱遥感数据波段划分过少,只有几个波段,使地面波谱测试数据与图像光谱数据难以精确比较。
因此,图像解译工作很少考虑地物的波谱特征,主要根据影像的色彩、色调、纹理、阴影等所形成的几何形态特征。
随着机载成像光谱仪(高光谱)技术的商业运作及2000年前后的高光谱成像卫星的发射,使得用光谱信息对地物的分析更精细、更准确。
3.出现地面温度反演技术地面温度反演是指从热红外图像数据的辐射亮度值获得地表温度信息。
反演方法主要有地表温度多通道反演法和多角度数据进行组分温度反演法等。
摄影测量基于VirtuoZo系统实习报告

摄影测量实习报告全数字化摄影测量系统VirtuoZo的学习及使用实习时间学生班级学生姓名学生学号所在院系指导教师一、实习的目的与意义本次实习基于全数字摄影测量工作站VirtuoZo,制作数字高程模型DEM、数字正射影像DOM和数字线划图DLG等产品;通过实习,应掌握VirtuoZo的基本功能和操作流程,掌握4D 产品制作过程;1、了解VirtuoZo数字摄影测量系统的功能;2、掌握VirtuoZo数字摄影测量系统的作业流程;3、加深对数字摄影测量基本理论、方法和过程的理解;4.通过本次实习,加强实践,培养实际动手能力;二、实习环境:1.硬件环境:Window操作系统;2.软件环境:全数字化摄影测量系统VirtuoZo;三、技术设计VirtouZo系统是基于WindowsNT的全数字摄影测量系统,利用数字影像或数字化影像完成摄影测量作业;由计算机视觉其核心是影像匹配与影像识别代替人眼的立体量测与识别,不再需要传统的光机仪器;从原始资料、中间成果及最后产品等都是以数字形式,克服了传统摄影测量只能生产单一线划图的缺点,可生产出多种数字产品,如数字高程模型、数字正射影像、数字线划图、景观图等,并提供各种工程设计所需的三维信息、各种信息系统数据库所需的空间信息;1、测区分析根据原始给定的航片资料和控制点资料,了解此测区共有两条航线,每条航线有三张相片,共可以建立四个模型;根据所提供的控制点数据可以了解每个模型的控制点;这样对测区有一个总体的了解;在VirtuoZo NT系统中,测区Block可理解为一个区域,或一个图幅范围内的所有像对;创建测区就是为将要进行测量的区域创建一个工作区目录;首先在D盘建立自己的文件夹,并将“数据”文件夹中的内容images影像数据文件夹、相机参数文件.cmr、控制点文件.ctl及控制点影像文件夹拷贝到自己的文件夹中;单击VirtuoZo NT主菜单中的文件,选择打开测区,系统弹出“打开测区”对话框,在当前默认位置输入测区名,点击打开则弹出“设置测区”对话框, 然后按实习指导指导书要求输入参数后,点击保存,创建自己的测区文件;下次进行作业时,先单击VirtuoZo NT主菜单的文件下的打开测图,打开自己的测图文件,在自己的测区下作业;2、资料分析根据给定的实习的原始资料,了解测区的航线数、影像数、原始影像的分辨率、像片比例尺、全测区控制点分布、控制点数据、相机数据;3、产品分析比例尺、精度原始影像的分辨率为,像片比例尺为1:30000;所生成的矢量图要求比例尺为1:10000;在进行操作过程中会有相关操作精度的分析,一般要求中误差小于影像分辨率即可;4、拟定的技术路线按照“4D产品”生产实习指导书的要求进行相关操作,先进行数据准备、参数设置、设置测区、建立模型、内定向、相对定向、绝对定向等等进行操作;VirtuoZo系统是基于WindowsNT的全数字摄影测量系统,利用数字影像或数字化影像完成摄影测量作业;全数字摄影测量系统VirtuoZo是一个全软件化设计、功能齐全和高度自动化的全数字摄影测量系统;VirtuoZo可基于航空影像生产从1:50 000到1:500各种比例尺的4D产品DEM、DOM、DLG和DRG;工作过程包括:数据准备、建立测区、模型定向、影像匹配和匹配结果的编辑、生成DEM和正射影像、DEM拼接和正射影像镶嵌、数字影像测图、产品数据格式输出、图廓整饰、成果分析;根据VirtuoZo NT作业流程:四、实习过程及步骤:一、数据准备1、资料分析·查看原始数字影像的分辨率、比例尺等;·查看相机检校参数,及其影像方位、框标的位置等;·查看地面控制点数据及其点位与分布;2、创建新测区,设置测区参数文件;3、相机参数文件的数据录入;4、地面控制点文件的数据录入;5、原始影像的数据格式转换;二、模型定向及生成核线影像1、创建模型,设置模型参数;2、自动内定向;3、自动相对定向;4、半自动量测控制点及绝对定向;5、确定核线影像区;6、自动生成核线影像;三、影像匹配及匹配后的编辑1、自动影像匹配;2、匹配后的编辑;四、生成DEM及正射影像的制作1、生成数字高程模型DEM;2、显示DEM,观察DEM是否与实际地形相符;3、生成数字正射影像;4、显示正射影像,观察正射影像是否有变形;五、DEM的拼接和影像的镶嵌1、设置拼接区域及参数;2、拼接区域的多模型DEM拼接;3、检查DEM的拼接误差;4、拼接区域内的正射影像镶嵌;5、显示全区域的正射影像,检查是否有拼接缝隙等误差;六、图廓整饰1、进入图廓整饰界面;2、选择当前要生成的地图文件;输入图廓文件名;3、设置各项图廓参数,建立图廓文件.mf;4、确定图幅的输出文件名及路径;5、生成图幅产品文件.map;七产品数据格式输出1、DEM输出;2、等高线输出;3、影像输出;八数字影像测图1、进入测图界面;2、新建或打开测图文件;3、装入立体模型已完成模型定向与核线重采样;4、界面调整与功能设置;5、地物的测绘与编辑;6、文字注记;九成果分析1、原始资料分析:主要分析原始影像的清晰度、分辨率等对产品成果的影响;2、基本数据分析:主要分析基本参数设置与基本精度;首先,生成质量报告,再对其进行分析;·生成质量报告:在VirtuoZo NT主菜单中,选择工具—>质量报告项,再分别选择定向、匹配、DEM等项,既可生成质量报告;·基本参数的分析:主要分析匹配窗口、DEM格网间隔的大小;正射影像的分辨率;成图比例尺等参数设置是否正确或合理;它们对产品有何影响;·基本精度分析:主要分析单模型定向精度、DEM的精度;多模型的拼接精度等是否达到了所要求的精度;3、成果的图形图象分析:主要分析DEM与正射影像;·显示DEM透视图,观察是否有错误或变形,例如:有多余的尖峰、河流中凸凹不平、多模型拼接处有裂缝或错位等;·显示正射影像,观察是否有黑洞或变形,例如:有黑块或黑条、房屋和桥梁扭曲、多影像接边处有错位等;五、实习体会摄影测量实习按教学计划安排在本学期十三周,我们开始了一周的摄影测量学的实习;刚开始学习数字摄影测量与遥感的时候,我对于这种测量方法充满了好奇与兴趣,对数字摄影测量工作站充满了憧憬;现在我终于有机会见识传说中的摄影测量工作站本次实习是采用VirtuoZo数字摄影测量系统;VirtuoZo大部分的操作不需要人工干预,可以批处理地自动进行,用户也可以根据具体情况灵活选择作业方式,提高了行业的生产效率;它不仅是制作各种比例尺的4D测绘产品的强有力的工具,也为虚拟现实和GIS提供了基础数据,是3S集成、三维景观和城市建模等最强有力的操作平台;由于资源有限,实习采用先教会一小部分同学,再有这部分同学叫其他同学的方法进行的,这种方法不仅节约了时间,而且效果显著;以往老师通过班级集体授课的方式并不能达到一一指导的效果,但这次实习效果显著;通过一周的实习,我从开始对摄影测量工作站一无所知,慢慢的开始有了初步了解,到最后可以亲自动手进行操作;每一个过程进行的都比较艰辛,但我知道万事开头难,一个新事物的接受过程并不容易,所以我坚持了下来;通过实习我认识到摄影测量学是通过获取立体影像来研究和确定被摄物体的形状、大小、空间位置、性质和相互关系的一门信息科学与技术;通过实际使用全数字摄影测量工作站,我了解数字摄影测量的内定向、相对定向、绝对定向、核线重采样、影相匹配、匹配结果的编辑、生成显示DEM、DOM及DEM拼接、DOM镶嵌数字测图、图廓整饰等操作方法;了解数字摄影测量系统是基于数字影像与摄影测量的基本原理,应用计算机技术、数字影像处理、影像匹配、模式识别等多学科的理论与方法,提取所摄对象用数字方式表达的几何与物理信息,从而获得各种形式的数字产品和目视化产品;这次实习使我了解了数字摄影测量系统,掌握摄影测量学基本概念和原理,加强摄影测量学的基本技能训练,掌握了操作过程,培养了我们分析问题和解决问题的实际动手能力;实习虽然只有短短的一周时间,但在实习过程中我发现了很多的问题,并在老师和同学的帮助下,顺利的解决了,让我更加深刻的了解了摄影测量学,把平时所学到的理论知识更加真实的呈现在我面前,这次的实习也是对摄影测量学有更进一步的学习;总之,这次实习不仅是对动手能力的一次提升,更是对理论知识的一次综合性的巩固;在实习过程中我们不仅要有细心严谨的态度,还要以认真的态度去对待,这样才能有更大的收获、更大的提升;。
VirtuoZoAds操作流程

程序会自动读取“前视、下视、后视”的sup文件;也可以手工输入, 从右侧影像列表中选中文件,单击左侧相应的
可以不设置正射 影像要采用的影像 文件,如果没有相 应的文件,选中下 视影像即可(一般 用下视影像来生成 正射影像)。 注意:检查左侧文件是否正确对应
内业
内业
1、新建工程。单击“文件->新建”,
弹出工程参数设置对话框,如下图所示:
参数说明:
Project: 工程名称和路径 Sup path: 原始数据SUP文件路径 ADS Path: 原始数据影像文件路径 Odf Path:原始数据odf文件路径 CAM Path:原始数据相机文件路径,在原始数据相机文件夹(cam)下, 一般有ttc、v001、v002、(v003、v004)文件夹,此选项选择的最 后迭代计算的结果,如v004。
外业
设置好矢量文件名后点击“保存”键,系统弹出“地图参数”对话框,如下图所示:
根据实际情况设置测图比例尺,其它参数暂时不需要设置,点击“保存” 键,系统新建vzv后的界面如下图所示:
外业
③、如下图装载原始影像。
点击“原始影像”后,在系统弹出的“选择一张原始影像”对话框 中选择裁切后的原始影像,点击“打开”键后进行测图。
外业
④、根据原始影像的范围设置矢量文件的范围,如图:
激活原始影像窗口,点击“文件”菜单下的“设置范围”菜单,系统根据原 始影像的范围,自动设置好地图参数对话框中的“地图坐标框”,如下图所 示:
点击“保存”键,将 矢量的范围更改成与 原始影像的范围一致。
提示转换完成, 点击“确定”键 退出。 转换为大地坐标的矢量文件为219-005.vzj_new.vzj,如图所示
高分辨率卫星影像在新能源工程测量中的应用研究
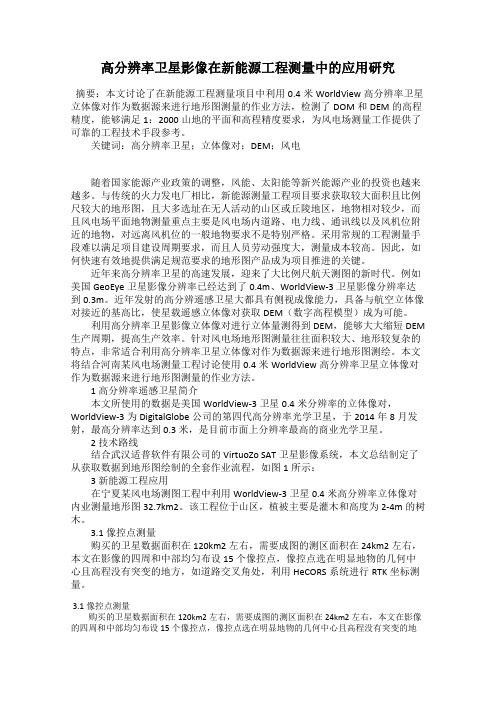
高分辨率卫星影像在新能源工程测量中的应用研究摘要:本文讨论了在新能源工程测量项目中利用0.4米WorldView高分辨率卫星立体像对作为数据源来进行地形图测量的作业方法,检测了DOM和DEM的高程精度,能够满足1:2000山地的平面和高程精度要求,为风电场测量工作提供了可靠的工程技术手段参考。
关键词:高分辨率卫星;立体像对;DEM;风电随着国家能源产业政策的调整,风能、太阳能等新兴能源产业的投资也越来越多。
与传统的火力发电厂相比,新能源测量工程项目要求获取较大面积且比例尺较大的地形图,且大多选址在无人活动的山区或丘陵地区,地物相对较少,而且风电场平面地物测量重点主要是风电场内道路、电力线、通讯线以及风机位附近的地物,对远离风机位的一般地物要求不是特别严格。
采用常规的工程测量手段难以满足项目建设周期要求,而且人员劳动强度大,测量成本较高。
因此,如何快速有效地提供满足规范要求的地形图产品成为项目推进的关键。
近年来高分辨率卫星的高速发展,迎来了大比例尺航天测图的新时代。
例如美国GeoEye卫星影像分辨率已经达到了0.4m、WorldView-3卫星影像分辨率达到0.3m。
近年发射的高分辨遥感卫星大都具有侧视成像能力,具备与航空立体像对接近的基高比,使星载遥感立体像对获取DEM(数字高程模型)成为可能。
利用高分辨率卫星影像立体像对进行立体量测得到DEM,能够大大缩短DEM 生产周期,提高生产效率。
针对风电场地形图测量往往面积较大、地形较复杂的特点,非常适合利用高分辨率卫星立体像对作为数据源来进行地形图测绘。
本文将结合河南某风电场测量工程讨论使用0.4米WorldView高分辨率卫星立体像对作为数据源来进行地形图测量的作业方法。
1 高分辨率遥感卫星简介本文所使用的数据是美国WorldView-3卫星0.4米分辨率的立体像对,WorldView-3为DigitalGlobe公司的第四代高分辨率光学卫星,于2014年8月发射,最高分辨率达到0.3米,是目前市面上分辨率最高的商业光学卫星。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
点击增加,选择需要引入的影像。 随后点击处理。
点击工程→影像列表,点击添加, 将影像引入列表、选中影像,点击 123编号
点击工程→模型列表,
VirtuoZoSat 空三定向界面
添加控制点
检测链接点的位置是否正确
添加连接点,平均分布
控制点量测保存,点击VirtuoZoSat 空三定向界面空三→绝对定位
• 支持所有坐标系(原点坐标系,地方坐标 系等)
Sat影像数据处理流程
数据准备(影像旋转)
同轨影像需旋转90度,目的在于消除上下视差。
数据准备(影像不旋转)
RPC 文件
模型连接
C D
连接点 地面控制点
E
B
A F
RPC 参ห้องสมุดไป่ตู้检查
点击文件→新建,新建一个工程,
坐标系设置
主程序界面
引入影像点击工程→引入影像
VirtuoZoSat 空三定向界面下,空三 →定位结果,出现报告文本文件
设置裁切模型、批定义子模型
设置裁切方法
VirtuoZoSAT工程界面中单击IGS 数字化测图 菜单项,进入 IGS 模块。 新建或打开测图文件(.vzj)
装载相应的立体模型。装载立体 模型,选择需要载入的立体模型
1:5000地形图
VirtuoZo Sat影像处理系统
主要内容
• 卫星影像成像原理 • 典型遥感卫星系统的介绍 • VirtuoZo Sat影像处理优点
• VirtuoZo Sat影像数据处理流程
卫星遥感影像测图优势
影像获取成本低
控制需求少
内外业一体化
全天候
应用范围广
VirtuoZo Sat影像处理优点
• 空三可以处理多个数据源,区域平差,独 立完成空三解析功能(IKONOS/GEOEYE-1、 QuickBird、WorldView、SPOT5、OrbView、 P5 Image、ALOS PRISM、EROS影像); • 物方匹配,生成保密点对DEM/DOM精度检 查,生成近似核线立体,斜视立体。
谢谢!!!