(机械制造行业)第七十七讲机械运动循环图
机械系统运动方案创新设计和运动循环图专业知识讲座

执行构件的基本运动形式有:
连续转动 往复摆动 往复移动 单向间歇转动 间歇往复移动 间歇往复摆动 平面一般运动
点的轨迹运动
Press any key to continue
本文档机所械提原供理的信息仅供参考第之八用章,不机能械作的为运科学动依方据案,及请机勿模构仿的。创文新档设如有计不
当之处,请联系本人或网站删除。
第一.确定其所要完成的工 作任务。
第二,根据机器的工作要求, 对需要采取的工艺方法或工 作原理进行分析。
第三,运动方案设计。
第四,施工图设计。
Press any key to continue
本文档机所械提原供理的信息仅供参考第之八用章,不机能械作的为运科学动依方据案,及请机勿模构仿的。创文新档设如有计不
运动要求及其相应机构举例
对执行构件的运动要求
可供选择的机构类型
等速连续转动
平行四边形机构、双万向联轴节机构、各种齿轮机构、轮系等。
非等速连续转动
双曲柄机构、转动导杆机构、单万向联轴节机构等。
往复摆动(只有行程角或若干 曲柄摇杆机构、双摇杆机构、摇块机构、摆动导杆机构、摇杆滑块机
位置要求)
构(滑块为原动件)、摆动从动件凸轮机构等。
当之处,请联系本人或网站删除。
(2). 合理选择机构类型,拟定机械运动方案。
由上确定了执行构件后,也就确定了所需执行机构数, 根据对机械产品的总体要求,合理地选择执行机构的类型。 再根据所选原动机(如电动机、液压泵等)的类型,确定传 动类型和传动机构,通过各种联接方式,将所有机构组合成 若干条机构系统, 并画出示意图,即为机械运动方案。 (3). 拟定机构系统的运动循环图。
当之处,请联系本人或网站删除。
100张机械原理动态图,收藏备用!
100张机械原理动态图,收藏备用!▲轴承摩擦原理▲机械手臂▲涡轮变速箱▲差速器球齿机机构来一张机械前言以前发过的老图,齿轮、梁板、凸轮、滑轨……看似简单的零部件,被天才工程师巧妙地组合到一起,就能精确完成各类复杂的工作。
机械动态图用一种简短的动画方式清晰的表达出了机械动作、原理和制作过程,令人神往,堪称机械行业的最美写真图,喜欢机械人的往往看后喜欢的不得了!飞机的星型发动机▼四冲发动机▼单曲轴对置活塞式发动机直升机▼双直列八缸蒸汽发动机▼凸轮导轨机构▼斯特林发动机▼水平对置发动机▼缝纫机▼机械手▼滑块机构▼夹具▼飞机发动机▼破碎机▼凸轮式间歇运动机构▼带传动▼齿轮传动▼喜欢吗小编想听到你的声音最后再来一个能看分钟的动图▲100多年前,古老自鸣钟的自动报时小鸟机构▲别小瞧一直原子笔,机械结构绝对不简单▲看到这个齿轮机构,心都碎了▲仔细看和琢磨才发现这个看似简单机构的奥妙▲凸轮还是齿轮?你分得清吗▲全自动小型冲锋枪的上弹、击发、退壳机构,看三分钟,才有完整连续的印象▲特殊的减速传动机构,有没有参考性?▲中学生用乐高积木营造的自动化世界▲周期性滑轨拨叉机构,巧妙而常用的机械结构▲细密的小型金属锁链就是这样高速形成的▲最清晰、完整的自动枪械(机枪)上弹、击发、退壳机构▲扭簧摆动机构,工程师既熟悉又陌生的机构▲连续摆、滑机构▲这一定是中国保定出品的机械手,保定府才玩铁球嘛▲鲁班自制飞鸟,骑乘游九州,不是传说哦▲让人发狂的异型齿轮机构,你能想象其中的三维啮合和运行状态吗▲除了炫技,这个齿轮机构实在没有卵用▲德国人菲加士·汪克尔在上世纪初发明的转子发动机▲数一数,这是多少缸、多少气门的发动机▲机械工程师给妻子的戒指,每次吵架狂怒可以转动几下静一静,败败火,结果……更抓狂了▲磁性软泥吞没小铁球,只要在软泥中添加细细的氧化铁粉就可以制成这样神奇的自带吞噬功能的磁性泥了。
▲好麻利,看着手疼▲原来这就是装冰淇淋的蛋卷▲开锁过程原来是这样的▲火车头原理▲电梯门(原来电梯门是这样开关的啊)▲一排排子弹的自动生产过程▲红通通的玻璃瓶加工过程▲螺旋状的通心粉就是这样被制造出来的▲晾衣架一次成型▲一张图看懂电风扇的结构▲两种液体勾兑的神奇▲神奇的家具▲木质模仿水波▲星型发动机工作原理▲飞机的星形发动机▲缝纫机▲舰炮弹药装填系统▲汽车等速万向节▲V 型发动机——汽缸排列在成一定角度的两个平面上,V6发动机▲直列式发动机——它的汽缸肩并肩地排成一排,L4发动机,一般的车都用▲水平对置式发动机——汽缸排列在发动机相对的两个平面上,保时捷911用的是这种的6缸▲马耳他十字机芯——用于控制时钟的秒针运动▲斯特林发动机▲铁链制作原理▲拉链工作原理▲无管虹吸原理▲确认就这样悄悄的进村吗▲简直是脑洞大开,打火机和火柴结婚后▲这只手确认一直动下去,大拇指表示不满给你一张机械图纸,你认识多少?我平台致力于好文推送,平台图文视频均来源网络,不代表平台观点和不对其真实性负责,仅供参考。
常用机械传动运动简图之欧阳育创编

常用机械传动运动简图时间:2021.02.04 创作:欧阳育
齿轮传动(含蜗杆传动)
名称
齿轮构件
圆柱齿轮圆锥齿轮蜗杆蜗轮圆柱齿轮(指明齿线) 圆锥齿轮(指明齿线)
直齿斜齿入字齿直齿斜齿弧齿
基
本
符
号
可
用
符
号
名
称
圆柱齿轮传动非圆齿轮传动圆锥齿轮传动准曲面齿轮传动
欧阳育创编 2021.02.04 欧阳育创编 2021.02.04
基
本
符
号
可
用
符
号
螺旋齿轮传动齿条传动扇形齿轮传动蜗轮与圆柱蜗杆传动蜗轮与球面蜗杆传动名
称
基
本
符
号
可
用
符
号
摩擦传动
名圆柱轮圆锥轮可调圆锥轮可调冕状轮
欧阳育创编 2021.02.04 欧阳育创编 2021.02.04
称
基
本
符
号
及
可
用
符
号
带传动
名称一般符号轴上宝塔轮不指明类型指明带的类型时
基
本
符
号
链传动
名
称
不指明类型指明链条类型
欧阳育创编 2021.02.04 欧阳育创编 2021.02.04
基
本
符
号
螺杆传动
名
整体螺母开合螺母滚珠螺母
称
基
本
符
号
及
可
用
符
号
时间:2021.02.04 创作:欧阳育
欧阳育创编 2021.02.04 欧阳育创编 2021.02.04。
常用机械传动运动简图之令狐文艳创作
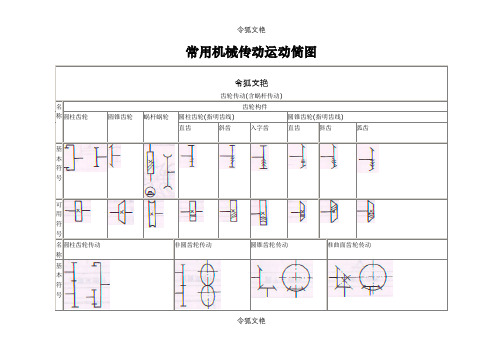
常用机械传动运动简图
令狐文艳
齿轮传动(含蜗杆传动)
名称
齿轮构件
圆柱齿轮圆锥齿轮蜗杆蜗轮圆柱齿轮(指明齿线) 圆锥齿轮(指明齿线)
直齿斜齿入字齿直齿斜齿弧齿
基
本
符
号
可
用
符
号
名
称
圆柱齿轮传动非圆齿轮传动圆锥齿轮传动准曲面齿轮传动
基
本
符
号
令狐文艳
可
用
符
号
螺旋齿轮传动齿条传动扇形齿轮传动蜗轮与圆柱蜗杆传动蜗轮与球面蜗杆传动名
称
基
本
符
号
可
用
符
号
摩擦传动
名
圆柱轮圆锥轮可调圆锥轮可调冕状轮
称
令狐文艳
基
本
符
号
及
可
用
符
号
带传动
名称一般符号轴上宝塔轮不指明类型指明带的类型时
基
本
符
号
链传动名
称
不指明类型指明链条类型
基
本
符
号
螺杆传动
令狐文艳
名
整体螺母开合螺母滚珠螺母称
基
本
符
号
及
可
用
符
号
令狐文艳。
常用机械传动运动简图之欧阳歌谷创编

常用机械传动运动简图
欧阳歌谷(2021.02.01)
齿轮传动(含蜗杆传动)
名称
齿轮构件
圆柱齿轮圆锥齿轮蜗杆蜗轮圆柱齿轮(指明齿线) 圆锥齿轮(指明齿线)
直齿斜齿入字齿直齿斜齿弧齿
基
本
符
号
可
用
符
号
名
称
圆柱齿轮传动非圆齿轮传动圆锥齿轮传动准曲面齿轮传动
基
本
符
号
欧阳歌谷创编 2021年2月1
可
用
符
号
螺旋齿轮传动齿条传动扇形齿轮传动蜗轮与圆柱蜗杆传动蜗轮与球面蜗杆传动名
称
基
本
符
号
可
用
符
号
摩擦传动
名
圆柱轮圆锥轮可调圆锥轮可调冕状轮
称
欧阳歌谷创编 2021年2月1
基
本
符
号
及
可
用
符
号
带传动
名称一般符号轴上宝塔轮不指明类型指明带的类型时
基
本
符
号
链传动
名
称
不指明类型指明链条类型
基
本
符
号
螺杆传动
欧阳歌谷创编 2021年2月1
名
整体螺母开合螺母滚珠螺母
称
基
本
符
号
及
可
用
符
号
欧阳歌谷创编 2021年2月1。
第七十七讲机械运动循环图

第七十七讲机器运动循环图1、呆板的运动循环凭据呆板完乐成能及生产工艺的差别,其运动可分为无周期性循环和周期性循环两大类。
无周期性循环的呆板如起重运输机器、修建机器、工程机器等,它们的事情往往没有牢固的周期性循环,随着呆板的事情所在、条件的差别而随时改变。
周期性循环的呆板如包装机、轻工自动机、自动机床等,呆板的各执行构件每经过一定的时间隔断后位移、速度和加快度便重复一次,完成一个运动循环。
生产中大部门呆板都属于具有牢固运动循环的呆板。
呆板的运动循环是指呆板完成其功效所需的总时间,用字母表现。
呆板的运动循环(又称事情循环)往往与各执行机构的运动循环相一致,因为一般来说执行机构的生产节奏就是整台呆板的运动节奏。
但是,也有不少呆板,从实现某一工艺行动历程要求出发,某些执行机构的运动循环周期与呆板的运动循环周期并不相等,呆板的一个运动循环内有些执行机构可完成若干个运动循环。
呆板执行机构中执行构件的运动循环至少包罗一个事情行程和一个空回行程,有的执行构件另有一个或若干个停歇阶段,执行机构的运动循环可表现为:T执=T事情+T空程+T停歇2、呆板运动循环图的类型呆板的运动循环图又称事情循环图,它是描述各执行机构之间有序的、既相互制约又相互协调配合的运动干系示意图。
呆板的事情循环图反应了生产节奏,可用来核算呆板的生产率、作为阐发和研究提高机器生产率的依据,可用来确定各个执行机构原动件在主轴上的相位,大概控制各个执行机构原动件的凸轮安装在分派轴上的相位,指导呆板中各个执行机构的具体设计、装配和调试,以包管呆板的工艺行动历程能顺利地实现。
通常运动循环图有如下几种:1)直线式运动循环图如图11—16所示为干粉压片机的直线运动循环图,其横坐标表现上冲头机构中曲柄转角φ。
这种运动循环图把运动循环的各运动区段的时间温顺序按比例绘制在直线坐标轴上。
其特点是:它能清楚地表现整个运动循环内各执行机构的执行构件行程之间的相互顺序和时间(或转角)的干系,并且绘制比力简朴,但执行构件的运动纪律无法显示,因而直观性较差。
高中物理:百看不厌的机械动图,机械原理!

高中物理:百看不厌的机械动图,机械原理!
一组机械机构原理高清机械原理动画,值得细品。
材料力学▼
剪切变形
固定简支外伸梁(均布力,集中力)挠曲线
固定简支外伸梁(均布力,集中力,力偶矩)挠曲线
简支梁(反对称均布力)挠曲线
简支梁(均布力)变形透视图
简支梁(均布力)挠曲线
简支梁(集中力)挠曲线1
简支梁(集中力)挠曲线2
结绳(1-9)▼
结绳1
结绳2
结绳3
结绳4
结绳5
结绳6
结绳7
结绳8
结绳9
常见的包装方式(1-5)▼
常见的包装方式1
常见的包装方式2
常见的包装方式3
常见的包装方式4
常见的包装方式5
典型的机构运动演示▼
凸轮机构1
凸轮机构2
平面连杆机构
螺旋传动带传动链传动
连杆
间歇运动机构
▐来源:文章来源于制造原理,转载旨在分享,如有侵权请联系删除!
▐标签:高考物理高中物理。
机械系统的运动简图课件

运动特性
曲柄滑块机构的运动特性包括行 程、速度、加速度等,这些特性 与机构的尺寸参数、连杆长度、
曲柄转角等因素密切相关。
齿轮传动机构
工作原理
齿轮传动机构是由两个或多个齿轮组成,通过齿轮的啮合 实现动力和运动的传递。
应用场景
齿轮传动机构广泛应用于各种机械设备和仪器仪表中,如 机床、汽车、钟表等。
类型与特点
简图的绘制原则与规范
规范与标准 • 遵循国家相关标准,如《机械制图》等。
• 采用统一的线型和颜色,以便于区分和辨识。
简图的绘制原则与规范
• 标注必要的尺寸和参数,便于定量分析和计算。
通过以上内容的学习和应用,可以更好地理解和分析机械系统的运动特性,为机 械设计和分析提供有力支持。
03
机械系统运动简图的分析方法
基于运动简图的机构设计项目实践
3. 通过运动简图分析机构性能,并进行优化设计。
4. 构建实验模型或原型机,测试并验证设计结果。
THANKS
感谢观看
机构运动分析实践
01
实践内容
02
选择一典型机构,绘制其运动简图。
基于运动简图,采用图解或解析法进行机构的位置分析。
03
机构运动分析实践
利用速度瞬心法或矢量方程法进行机构的速 度分析。
通过加速度分析,研究机构的动态性能。
机构运动分析实践
实践步骤
1
2
1. 确定实践所用的机构和运动简图。
3
2. 应用运动学原理,进行机构的位置分析,求解 关键位置参数。
齿轮传动机构可分为直齿轮、斜齿轮、锥齿轮等多种类型 ,不同类型的齿轮传动机构具有不同的传动特点,如传动 比、传动效率、噪音等。
凸轮机构
机械运动方案设计

机械运动方案设计机械系统通常由原动机、传动部分、执行机构与控制部分等组成。
机械运动方案设计得主要内容就是:根据给定机械得工作要求,确定机械得工作原理,拟定工艺动作与执行构件得运动形式,绘制工作循环图;选择原动机得类型与主要参数,并进行执行机构得选型与组合,随之形成机械系统得几种运动方案,对运动方案进行分析、比较、评价与选择;对选定运动方案中得各执行机构进行运动综合,确定其运动参数,并绘制机构运动简图,在此基础上,进行机械得运动性能与动力性能分析.一、机械运动方案设计得步骤机械运动方案设计得一般过程如下:构思机械工作原理,针对设计任务书中得规定得机械功能,构思实现该功能所采用得科学原理与技术手段,即机械得工作原理;由工作原理进一步确定机械所要实现得工艺动作,复杂得工艺动作可分解为几种简单运动得合成,选用适当得机构实现这些运动就就是机械运动方案设计得主要任务。
二、绘制机械工作循环图(又称运动循环图)针对机械要实现得工艺动作,确定执行构件得数目,为了实现机械得功能,各执行构件得工艺动作之间往往有一定得协调配合要求,为了清晰地表述各执行构件运动协调关系,应绘制机械得工作循环图。
机械工作循环图也就是进行机构得选型与拟定机构得组合方案得依据。
三、选择执行机构类型根据执行构件得运动形式与运动参数,选定实现执行构件工艺动作得执行机构,并将各执行机构有机得组合在一起,以实现机械得整体工艺动作.在进行执行机构选型时,应首先满足执行构件运动形式得要求,然后通过对所选机构进行综合、组合、变异与调整等,以满足执行构件得运动参数与运动特性等要求。
一般来说,满足执行构件工艺动作得执行机构往往不就是一种,而就是多种,故应该进行综合评价,择优选用。
四、绘制机械运动示意图依据机械工作性质与工作环境等,合理选取原动机类型;原动机得运动与动力经传动系统得传递与转化后,驱动执行机构得主动件,使执行机构实现预期得工艺动作.根据机械得工作原理、执行构件运动得协调配合要求,与所选定得各执行机构,拟定机构得组合方案,画出机械运动示意图,这种示意图就表示可机械运动配合情况与机构组成情况,代表机械运动系统得方案,对于运动情况比较复杂得机械,机械运动示意图还可以采用轴测投影得方法绘制出立体得机械运动示意图.五、执行机构得尺度综合根据各执行构件与主动件得运动参数,以及各执行构件运动间得协调配合要求,同时考虑执行机构得动力性能要求,确定各执行机构中构件得尺寸与几何形状(如凸轮廓线)等.六、绘制运动机械简图针对各机构尺度综合所得结果,进行机构得运动分析与动态静力分析,并从运动规律、动力条件、工作特性等多方面进行综合评价,确定机构其它相关尺寸。
百看不厌的机械工作动态图,让你长见识的原理图37

百看不厌的机械工作动态图,让你长见识的原理图37四冲发动机飞机的星型发动机飞机螺旋桨与机枪同步图发动机喷气式发动机喷射推进机潜艇使用的斯特林发动机曲柄连杆机构是发动机三相电子绕组励磁双涵道涡轮风扇发动机外燃机:斯特林发动机原理蒸汽机火车的推进原理汽车换挡机制柴油发动机汽车汽油发动机制单曲轴对置活塞式发动机直升机单杠发动机多缸飞机发动机双直列八缸蒸汽发动机马克沁机关枪原理打火机原理焊接卷笔刀开锁原理航模单杠发动机航模四缸发动机机械键盘坦克主动轮传动1、滑块-曲柄同轴踏板解析:它是普通滑块的双滑块-曲柄机构。
两个踏板的速度是相同的。
2、齿轮传动的同轴踏板解析:两个踏板的速度是相同的。
3、同轴踏板解析:两个踏板的速度几乎相同。
蓝轴的针脚之间或绿轴的沟槽之间的相对位置影响速度关系。
4、锥齿轮传动的踏板解析:按下粉红色踏板,通过锥齿轮传动和超越离合器使橙色轮旋转。
由于车轮惯性,可以连续旋转。
粉红色配重趋向于将踏板带到其上部位置(可以用弹簧代替)。
5、变速自行车解析:单链(由黑线表示)包裹在粉红色的链轮,紫色空转链轮和两个链轮(蓝色和绿色)周围。
两个后者属于沿相同方向安装的两个飞轮,轮毂固定在自行车后轮上。
一次仅接合一个飞轮,而另一个自由地向后旋转。
由于链条在与第一链轮相反的方向上缠绕第二链轮,所以骑车人仅需要向后踩踏以接合它。
事实上,它是将双向旋转转换成不同速度的单向旋转的机制。
6、单踏板连杆机构7、双踏板动力输出机构解析:输入为两个同轴水平旋转轴的踏板(粉色和紫色)。
输出为垂直轴。
该机构将输入角振荡转换为输出连续旋转,具有两个死位置。
输出惯量有助于机构克服死点。
黄色磁盘凸轮和弹簧滑块(绿色)不允许机构在其死点停止以便于启动。
齿轮系统确保两个踏板的相反的旋转方向。
8、脚力洗衣机解析:洗涤桶固定到橙色垂直轴,其速度由于两个皮带驱动器而增加。
动图显示两种工作模式:1)浴缸振动:红色限位器设置在其向前位置,以限制踏板的运动。
经典机械结构动画图
摇块机构
该机构是通过将曲柄滑块机构中的连杆固定而演化得出, 它可把主动件的匀速回转运动转化为导杆相对于滑块的往复 移动并随滑块摆动的形式。
转动导杆机构
该机构是通过将曲柄滑块机构中的曲柄固定演 化而成,它可将主动件的匀速回转转化为导杆 的非匀速摆动,且具有急回特性。
插齿机
该机构由两个四杆机构组成,粉红色的杆、红色杆、绿色杆、机架组成曲柄摇杆机 构,绿色杆、橙色杆、黄色杆、机架组成摇杆滑块机构,当粉红色的曲柄匀速回转 时,绿色杆作变速摆动,通过橙色的连杆使黄色的滑块向下切削时作近似匀速运动, 往上则因曲柄摇杆机构的急回运动性质使插齿刀快速退回。
双摇杆机构
摇杆AB为原动件,通过连杆BC带动从动件CD也 作往复摆动,虚线AB1、AB2为摇杆AB的两极限 位置,也是当摇杆AB为原动件时,机构的两死点 位置。
双曲柄机构
当曲柄AB为原动件作匀速回转时,曲柄CD跟随作周期性的匀速圆周回转, 当曲柄从位置AB1转过φ1角到位置AB2时,从动件CD转过180°,当曲柄从 位置AB2转过φ2角到位置AB1时,从动件CD转过180°,因为φ1>φ2 ,即 t1>t2,从动曲柄的角速度不是常数,而是作变角速度回转。
•
人生得意须尽欢,莫使金樽空对月。01:41:0401:41:0401:4110/20/2020 1:41:04 AM
•
安全象只弓,不拉它就松,要想保安 全,常 把弓弦 绷。20.10.2001:41:0401:41Oc t-2020- Oct-20
•
加强交通建设管理,确保工程建设质 量。01:41:0401:41:0401:41Tuesday, October 20, 2020
带张紧轮的三角带传动
三角带工作一段时间后会因为塑性伸长而松弛,致使张紧力降低,张紧轮 可以保证足够的张紧力。张紧轮应放在松边内侧靠大带轮处,以免小带轮 包角减小过多,影响传动能力。
工艺原理及工艺动作过程

目录一. 题目:专用机床的刀具进给机构和工作台回转机构设计 (2)二.工艺原理及工艺动作过程 (2)三.原始数据和设计要求 (2)四.设计方案提示 (2)五.设计任务与内容 (3)六.机械运动设计方案的拟定 (3)(1)回转台间歇运动机构方案 (3)(2)主轴箱刀具移动机构方案 (4)(3)传动机构的选型 (5)七.机械运动循环图 (6)(1).运动分析 (6)八.机构的组合方式 (6)九.机械运动简图、原理的简要说明、及其方案的选定 (7)十.尺寸的计算说明及设计 (8)(1).槽轮机构 (8)(2).圆柱凸轮的尺寸设计 (9)(3).减速器的传动计算 (10)十一.课程设计心得 (11)十二.参考文献 (11)一. 题目:专用机床的刀具进给机构和工作台回转机构设计二.工艺原理及工艺动作过程四工位专用机床是在四个工位上分别完成相应的装卸工件、钻孔、扩孔、铰孔工作。
它的执行动作有两个:一是装有四工位工件的回转转动;二是装有专用电动机带动三把专用的主轴箱的刀具转动和移动。
三.原始数据和设计要求(1)刀具顶端离开工作表面65mm,快速移动送进60mm后,再匀速送进60mm(包括5mm刀具切入量、45mm工件孔深、10mm刀具切出量),然后快速返回。
回程和工作行程的平均速度之比K=2.(2)刀具匀速进给速度为2mm/s,工件装、卸时间不超过10s。
(3)生产率为每小时75件。
(4)执行机构能装入机体内。
图1:专用机床外形尺寸四.设计方案提示(1)回转台的间歇转动可采用槽轮机构、不完全齿轮机构、凸轮式间歇运动机构。
(2)主轴箱的刀具移动可采用圆柱凸轮机构、移动从动杆盘形凸轮机构、凸轮—连杆机构、平面连杆机构等。
(3)由生产率可求出一个运动循环所需的时间T=60/(75/60)s=48s,刀具匀速送进60mm所需时间t=30s,道具其余移动(包括快速送进60mm,快速返回120mm)共需18s。
回转工作台静止时间为36s,因此足够工件装卸所需时间。
运动循环图的设计

1. 运动循环图的设计1.1运动循环图定义、作用 1运动循环图 又称为工作循环图,分为机构运动循环图和机器运动循环图。
2执行机构的运动循环 是指执行机构周期性回到初始位置之间的时间间隔,记作,表示第个执行机构。
3 机器的运动循环是指完成其功能所需的总时间,也就是在正常工作状态下两相邻产品之间的时间间隔。
记作。
4 机器的工作循环是与任一执行机构的运动循环相等的,即当采用分配轴统一控制驱动各执行机构时,分配轴转一转的时间就是一个工作循环,也就是说分配轴转一转生产一个产品,机器的生产率在数值上等于分配轴转速 从而有:()s Q n T p 6060==5 执行机构循环图用来描述在一个工作循环内,执行机构在任一时刻的运动状态的图形。
k T :工进时间 s T 工停时间 d T 工退时间 0T 初停时间6 机器的运动循环图将各执行机构的运动循环图按同一时刻(或转角)绘制在一起,以某一个执行机构的工作起点作为基准,表示出各执行机构相对于该主要机构动作的先后次序的示意图。
为完成一定的功能,往往需要多个执行机构,在一个运动周期中各执行机构必须严格按规定的时间运动,各执行机构的动作必须协调,进行运动协调的手段、依据就是机器的运动循环图。
循环图设计的要求:● 执行机构的动作必须满足工艺要求,各执行构件动作按一定顺序进行,保证各执行构件的动作的时间同步; ● 各执行机构的动作不产生空间干涩,保证空间同步;● 在保证时间、空间同步化的前提下,工作循环周期尽可能短,以提高生产率。
运动循环图的作用:●执行机构具体设计的依据; ●装配、调试机械的依据; ● 分析、研究提高生产率的途径的基本依据。
1.2 运动循环图的表示方法直线式:将运动循环的各运动区段和顺序按比例绘制在直线坐标轴上。
极坐标式:将运动循环的各运动区段和顺序按比例绘制在圆形坐标上。
直角坐标式:将运动的各运动区段和顺序按比例绘制在直角坐标上。
为简单起见,常将工作行程、空回行程、停歇区段分别用上升、下降和水平直线来表示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第七十七讲机械运动循环图1、机器的运动循环根据机器完成功能及生产工艺的不同,其运动可分为无周期性循环和周期性循环两大类。
无周期性循环的机器如起重运输机械、建筑机械、工程机械等,它们的工作往往没有固定的周期性循环,随着机器的工作地点、条件的不同而随时改变。
周期性循环的机器如包装机、轻工自动机、自动机床等,机器的各执行构件每经过一定的时间间隔后位移、速度和加速度便重复一次,完成一个运动循环。
生产中大部分机器都属于具有固定运动循环的机器。
机器的运动循环是指机器完成其功能所需的总时间,用字母表示。
机器的运动循环(又称工作循环)往往与各执行机构的运动循环相一致,因为一般来说执行机构的生产节奏就是整台机器的运动节奏。
但是,也有不少机器,从实现某一工艺动作过程要求出发,某些执行机构的运动循环周期与机器的运动循环周期并不相等,机器的一个运动循环内有些执行机构可完成若干个运动循环。
机器执行机构中执行构件的运动循环至少包括一个工作行程和一个空回行程,有的执行构件还有一个或若干个停歇阶段,执行机构的运动循环可表示为:T执=T工作+T空程+T停歇2、机器运动循环图的类型机器的运动循环图又称工作循环图,它是描述各执行机构之间有序的、既相互制约又相互协调配合的运动关系示意图。
机器的工作循环图反映了生产节奏,可用来核算机器的生产率、作为分析和研究提高机械生产率的依据,可用来确定各个执行机构原动件在主轴上的相位,或者控制各个执行机构原动件的凸轮安装在分配轴上的相位,指导机器中各个执行机构的具体设计、装配和调试,以保证机器的工艺动作过程能顺利地实现。
通常运动循环图有如下几种:1)直线式运动循环图如图11—16所示为干粉压片机的直线运动循环图,其横坐标表示上冲头机构中曲柄转角φ。
这种运动循环图把运动循环的各运动区段的时间和顺序按比例绘制在直线坐标轴上。
其特点是:它能清楚地表示整个运动循环内各执行机构的执行构件行程之间的相互顺序和时间(或转角)的关系,并且绘制比较简单,但执行构件的运动规律无法显示,因而直观性较差。
2)圆周式运动循环图图11—17所示为干粉压片机的圆周式运动循环图。
它以上冲头中的曲柄作为定标构件,曲柄每转一周为一个运动循环。
这种运动循环图将运动循环的各运动区间的时间和顺序按比例绘在圆形坐标上,其特点是:直观性强。
因为机器的运动循环通常是在分配轴转一转的过程中完成。
所以通过它能直接看出各个执行机构原动件在分配轴上所处的相位,因而便于凸轮机构的设计、安装、调试。
但是,当同心圆太多时,看起来不很清楚。
3)直角坐标式运动循环图图11—18所示为干粉压片机的直角坐标式运动循环图。
图中横坐标式定标构件——曲柄的运动转角φ,纵坐标表示上冲头、下冲头、料筛的运动位移。
这种运动循环图将运动循环的各运动区段的时间和顺序按比例绘在直角坐标轴上。
实际上它就是执行构件的位移线图,但为了简单起见通常将工作行程、空回行程、停歇区段分别用上升、下降和水平的直线来表示。
其特点是能清楚地看出各执行机构的运动状态及起迄时间,并且各执行机构的位移情况及相互关系一目了然。
因而便于指导执行机构的几何尺寸设计。
图11—16图11—17图11—18在上述三种类型的运动循环中,直角坐标式运动循环图不仅能表示出这些执行机构中构件动作的先后,而且还能描述它们的运动规律及运动上的配合关系,直观性强,比其他两种运动循环图更能反映执行机构的运动特征,所以在设计机器时,通常优先采用直角坐标式运动循环图。
4)机器运动循环图的功用(1)机器的工作循环图反映了它的生产节奏,因此可用来核算机器的生产率,并可用来作为分析、研究提高机械效率的依据;(2)用来确定各执行机构原动件在主轴上的相位,或者控制各个执行机构原动件的凸轮安装在分配轴上的相位;(3)用来指导机器中各执行机构的具体设计;(4)用来作为装配、调试机器的依据;(5)用来分析、研究各执行机构的动作如何能紧密配合、相互协调,以保证机器的工艺动作过程能顺利实现。
3、机器运动循环图的设计步骤与方法在设计机器的运动循环图(工作循环图)时,通常机器应实现的功能已知,理论生产率已确定,机器的传动方式及执行机构的结构均已初步拟订好,可根据各机构运动时既不干涉、而机器完成一个产品所需要的时间又最短的原则,按以下步骤进行:1)确定执行机构的运动循环时间;2)确定组成执行构件运动循环的各个区段;3)初步绘制执行机构执行构件的运动循环图;4)完成执行机构的设计后对初步绘制的运动循环图进行修改;5)进行各执行机构的协调设计(又称同步化设计);6)画出机器的工作循环图;下面以自动打印机和饼干自动包装机为例说明来机器运动循环图的设计步骤与方法。
例:自动打印机(1)确定执行机构的运动循环时间如图11—19所示,该机构有两个执行机构:打印机和送料机构。
我们选择打印机的执行构件——打印头作为定标件,以它的运动位置(转角或位移)作为确定各个执行构件的运动先后次序的基准。
所以先绘制打印头的运动循环图。
已知自动打印机的生产率为4500件/班,即: 图11—19 min 4.96084500pc Q =⨯= 由于实际生产率总是低于理论生产率,为了满足每班打印4500件的总功能要求,所以:min 10pc Q =。
即自动打印机的分配转速为:min 10r 。
分配轴转一周即完成一个产品打印,所需时间为:s n T p 分6min 10111===。
(2)确定组成执行机构运动循环的各个区段根据打印工艺要求,打印头的运动循环由如下四段组成:t k1——打印头的前进运动时间 t ok1——打印头在产品上停留的时间 t d1——打印头退回运动时间 t o1——打印头停歇时间因此,打印头的运动循环 t p1为:11111o d ok k p t t t t T +++=相应的分配轴转角为:1111360o d ok k ϕϕϕϕ+++=ο(3)确定打印头各区段运动的时间及转角为保证打印质量,打印头在产品上停留的时间为:s t ok 2.01= 相应的分配轴转角为:οο1262.0360360111=⨯=⨯=p ok ok T t ϕ 为保证送料机构有充分的时间来装料、送料,取:s t o 31=相应的分配轴转角为:οο18063360360111=⨯=⨯=p o o T t ϕ 根据打印头的运动规律要求,分别取其前进和退回运动的时间为:s t s t d k 3.15.111==相应的分配轴转角为:οο9065.1360360111=⨯=⨯=p k k T t ϕ οο7863.1360360111=⨯=⨯=p d d T t ϕ (4)初步绘制执行机构的执行构件的运动循环图根据以上计算结果,绘制出打印头的直角坐标式循环图如图11—20(a )所示。
同样,可以画出送料机构的执行构件——送料推头的运动循环图如图11—20(b )所示,(2k t 、2d t 、2o t 分别为送料推头的前进运动、退回运动和停歇时间)。
(5)在完成执行机构的设计后对初步绘制的运动循环图进行修改根据加工工艺要求初步拟定的执行构件运动规律设计出的执行机构,往往由于整体布局和结构方面的原因,或者由于加工工艺方面的原因,在实际使用中要作必要的修改。
例如为了满足压力角、传动角等条件,构件尺寸必须进行调整。
又比如当零部件加工装配有困难时,也必须对执行机构进行调整。
这样执行机构所实现的运动规律与原先设想的就不完全相同,因此必须根据执行构件的实际运动规律对运动循环图进行修改。
(a ) (b )图11—20(6)进行各执行机构的协调设计各执行机构的协调设计又称同步化设计,最后画出实际机器的工作循环图。
我们以打印机构的起点为基准,把打印头和送料推头的运动循环图按同一时间(或分配轴的转角)比例组合起来画成总图,这就是自动打印机的机器工作循环图。
但是当把这两个执行构件的运动循环图组合起来时可能出现两种情况。
一种是打印头从开始打印,到打到工件并在它上面停留一段时间再退回到原处等待送料,完成 图11—21一个运动循环后,送料机构才开始送料、退回、停歇。
这样组成的机器运动循环,即为机器的最大运动循环,如图所示。
显然,这样两个执行机构一个工作完后另一个才开始工作,不会产生任何干涉,但这种运动循环图是极不经济的,机器的运动循环时间很长,而且其中许多时间是空等在那里,生产效率极低,如图11—21所示。
如果当送料机构刚把产品送到打印工位时,打印头正好压在产品上,即如图11—22所示的,点1和点2在时间上重合,这样,两执行机构的运动循环完全重合,即可使机器获得最小的运动循环:(a ) (b )21min p p T T T == 图11—22这种循环图在时间和顺序上能基本满足设计要求,但这仅是一种临界状态,实际上点1和点2不可能精确重合。
因为实际的执行机构由于尺寸有误差、运动副之间存在间隙等原因,存在着运动规律误差,其结果势必影响产品的加工质量和机器的正常工作。
例如,当打印头打倒工件时,工件还未到位,正在移动,于是印到工件上的图象就会模糊不清,影响打印质量。
为了确保打印机能正常工作,应使点2超前1t ∆时间,即将相应的分配轴转角也根据实际情况超前ϕ∆,通常取οο10~5≥∆ϕ,经修改后就可得到比较合理的机器工作循环T (图b ),这样的工作循环图既满足机器生产率的要求,又符合产品加工过程的实际,并且能保证机器的正常可靠地运转。
因为自动打印机的工作原理是:送料机构首先将产品送至打印工位,然后打印机构对产品进行打印工艺,故它们之间只有时间上的顺序关系,而没有空间上的相互干涉,所以前面阐述的只是机器运动循环图的时间同步化设计。
如图11—23所示就是经过时间同步化设计后的机器工作循环图。
除了进行运动循环图的时间同步化设计外,有的机器因为其各执行构件会产生空间干涉,所以还必须进行运动循环图的空间同步化设计,下面以饼干自动包装机为例来说明。
图11—23例:饼干自动包装机的运动循环图设计如图11—13所示,该机器的两个折边机构会在空间产生干涉。
这两个折边构件顶端的轨迹在M点相交,也就是在M点会产生干涉,所以必须进行空间同步化设计。
为了避免产生空间干涉,我们可以使左折边构件1返回至原位置后,右折边构件4再压下去。
但这样会产生两个不良后果:一是循环时间太长,不经济;二是被压下去已折过边的包装纸有可能会回弹到虚线位置,影响包装质量。
为了保证左、右两个折边构件在生产过程中运动时间最短、包装质量最好,同时又不发生相互干涉,可以采用的空间同步化的方法和步骤如下所示。
(1)首先分别绘制出左、右折边执行机构的运动循环图,如图11—24(a)、(b)所示。
(2)分别绘出左、右折边构件的位移线图。
因为左、右折边构件均作往复摆动,其摆角ϕ是时间的函数,所以可分别作出左、右折边构件的t-ϕ位移曲线图如图11—25(a)、(b)所示。