自动化专业英文文献的翻译
自动化专业专业英语作文
自动化专业专业英语作文Title: The Role of Automation in Modern Industry。
In recent years, automation has become an integral part of various industries, revolutionizing the way tasks are performed and enhancing efficiency and productivity. This essay delves into the significance of automation in modern industry, exploring its benefits, challenges, and future implications.Firstly, automation has significantly improved efficiency in industrial processes. By replacing manual labor with automated systems, tasks can be completed at a faster pace and with greater precision. This not only reduces production time but also minimizes the margin for error, leading to higher-quality outputs. For example, in manufacturing plants, robotic arms can assemble products with unparalleled speed and accuracy, resulting in increased output and reduced costs.Moreover, automation plays a crucial role in ensuring workplace safety. By delegating hazardous or repetitive tasks to machines, the risk of accidents and injuries to human workers is significantly reduced. For instance, in environments with extreme temperatures or exposure to toxic substances, automated systems can operate seamlessly without endangering human health. This not only protects workers but also minimizes liability for employers and enhances overall operational stability.Furthermore, automation facilitates data-driven decision-making through the integration of advanced sensors and analytics technologies. By collecting and analyzingreal-time data, automated systems can identify inefficiencies, predict maintenance needs, and optimize resource allocation. For instance, in smart factories, sensors embedded in machinery can monitor performance metrics such as temperature, pressure, and energy consumption, allowing managers to make informed decisions to improve operational efficiency and reduce downtime.However, despite its numerous benefits, automation alsopresents certain challenges. One such challenge is the potential displacement of human workers. As more tasks become automated, there is a concern that traditional jobs may become obsolete, leading to unemployment and economic disparity. To address this challenge, it is essential to invest in retraining programs and education initiatives to equip workers with the skills needed to thrive in an automated workforce.Additionally, there are concerns regarding the ethical implications of automation, particularly regarding privacy and job security. As automated systems collect vast amounts of data, there is a risk of privacy breaches and misuse of personal information. Similarly, the widespread adoption of automation raises questions about job security and the rights of workers. It is imperative for policymakers and industry stakeholders to establish clear regulations and guidelines to ensure that automation is implemented ethically and responsibly.Looking ahead, the future of automation holds immense potential for innovation and growth. As technologies suchas artificial intelligence and machine learning continue to advance, the capabilities of automated systems will only expand. From autonomous vehicles to smart cities, automation will revolutionize not only industrial processes but also the way we live and work. However, it is essential to approach automation with caution and foresight, addressing challenges such as job displacement and ethical concerns to ensure that its benefits are equitably distributed across society.In conclusion, automation is a transformative forcethat is reshaping modern industry in profound ways. From enhancing efficiency and productivity to improving workplace safety and enabling data-driven decision-making, the benefits of automation are undeniable. However, it is essential to address the challenges it presents, such as job displacement and ethical considerations, to ensure that automation serves the best interests of society as a whole. By embracing automation responsibly and thoughtfully, we can unlock its full potential to drive innovation, growth, and progress.。
自动化专业毕业论文外文文献翻译

目录Part 1 PID type fuzzy controller and parameters adaptive method (1)Part 2 Application of self adaptation fuzzy-PID control for main steam temperature control system in power station (7)Part 3 Neuro-fuzzy generalized predictive control of boiler steam temperature ..................................................................... (13)Part 4 为Part3译文:锅炉蒸汽温度模糊神经网络的广义预测控制21Part 1 PID type fuzzy controller and Parametersadaptive methodWu zhi QIAO, Masaharu MizumotoAbstract: The authors of this paper try to analyze the dynamic behavior of the product-sum crisp type fuzzy controller, revealing that this type of fuzzy controller behaves approximately like a PD controller that may yield steady-state error for the control system. By relating to the conventional PID control theory, we propose a new fuzzy controller structure, namely PID type fuzzy controller which retains the characteristics similar to the conventional PID controller. In order to improve further the performance of the fuzzy controller, we work out a method to tune the parameters of the PID type fuzzy controller on line, producing a parameter adaptive fuzzy controller. Simulation experiments are made to demonstrate the fine performance of these novel fuzzy controller structures.Keywords: Fuzzy controller; PID control; Adaptive control1. IntroductionAmong various inference methods used in the fuzzy controller found in literatures , the most widely used ones in practice are the Mamdani method proposed by Mamdani and his associates who adopted the Min-max compositional rule of inference based on an interpretation of a control rule as a conjunction of the antecedent and consequent, and the product-sum method proposed by Mizumoto who suggested to introduce the product and arithmetic mean aggregation operators to replace the logical AND (minimum) and OR (maximum) calculations in the Min-max compositional rule of inference.In the algorithm of a fuzzy controller, the fuzzy function calculation is also a complicated and time consuming task. Tagagi and Sugeno proposed a crisp type model in which the consequent parts of the fuzzy control rules are crisp functional representation or crisp real numbers in the simplified case instead of fuzzy sets . With this model of crisp real number output, the fuzzy set of the inference consequence willbe a discrete fuzzy set with a finite number of points, this can greatly simplify the fuzzy function algorithm.Both the Min-max method and the product-sum method are often applied with the crisp output model in a mixed manner. Especially the mixed product-sum crisp model has a fine performance and the simplest algorithm that is very easy to be implemented in hardware system and converted into a fuzzy neural network model. In this paper, we will take account of the product-sum crisp type fuzzy controller.2. PID type fuzzy controller structureAs illustrated in previous sections, the PD function approximately behaves like a parameter time-varying PD controller. Since the mathematical models of most industrial process systems are of type, obviously there would exist an steady-state error if they are controlled by this kind of fuzzy controller. This characteristic has been stated in the brief review of the PID controller in the previous section.If we want to eliminate the steady-state error of the control system, we can imagine to substitute the input (the change rate of error or the derivative of error) of the fuzzy controller with the integration of error. This will result the fuzzy controller behaving like a parameter time-varying PI controller, thus the steady-state error is expelled by the integration action. However, a PI type fuzzy controller will have a slow rise time if the P parameters are chosen small, and have a large overshoot if the P or I parameters are chosen large. So there may be the time when one wants to introduce not only the integration control but the derivative control to the fuzzy control system, because the derivative control can reduce the overshoot of the system's response so as to improve the control performance. Of course this can be realized by designing a fuzzy controller with three inputs, error, the change rate of error and the integration of error. However, these methods will be hard to implement in practice because of the difficulty in constructing fuzzy control rules. Usually fuzzy control rules are constructed by summarizing the manual control experience of an operator who has been controlling the industrial process skillfully and successfully. The operator intuitively regulates the executor to control the process by watching theerror and the change rate of the error between the system's output and the set-point value. It is not the practice for the operator to observe the integration of error. Moreover, adding one input variable will greatly increase the number of control rules, the constructing of fuzzy control rules are even more difficult task and it needs more computation efforts. Hence we may want to design a fuzzy controller that possesses the fine characteristics of the PID controller by using only the error and the change rate of error as its inputs.One way is to have an integrator serially connected to the output of the fuzzy controller as shown in Fig. 1. In Fig. 1,1K and 2K are scaling factors for e and ~ respectively, and fl is the integral constant. In the proceeding text, for convenience, we did not consider the scaling factors. Here in Fig. 2, when we look at the neighborhood of NODE point in the e - ~ plane, it follows from (1) that the control input to the plant can be approximated by(1)Hence the fuzzy controller becomes a parameter time-varying PI controller, itsequivalent proportional control and integral control components are BK2D and ilK1 P respectively. We call this fuzzy controller as the PI type fuzzy controller (PI fc). We can hope that in a PI type fuzzy control system, the steady-state error becomes zero.To verify the property of the PI type fuzzy controller, we carry out some simulation experiments. Before presenting the simulation, we give a description of the simulation model. In the fuzzy control system shown in Fig. 3, the plant model is a second-order and type system with the following transfer function:)1)(1()(21++=s T s T K s G (2) Where K = 16, 1T = 1, and 2T = 0.5. In our simulation experiments, we use thediscrete simulation method, the results would be slightly different from that of a continuous system, the sampling time of the system is set to be 0.1 s. For the fuzzy controller, the fuzzy subsets of e and d are defined as shown in Fig. 4. Their coresThe fuzzy control rules are represented as Table 1. Fig. 5 demonstrates the simulation result of step response of the fuzzy control system with a Pl fc. We can see that the steady-state error of the control system becomes zero, but when the integration factor fl is small, the system's response is slow, and when it is too large, there is a high overshoot and serious oscillation. Therefore, we may want to introduce the derivative control law into the fuzzy controller to overcome the overshoot and instability. We propose a controller structure that simply connects the PD type and the PI type fuzzy controller together in parallel. We have the equivalent structure of that by connecting a PI device with the basic fuzzy controller serially as shown in Fig.6. Where ~ is the weight on PD type fuzzy controller and fi is that on PI type fuzzy controller, the larger a/fi means more emphasis on the derivative control and less emphasis on the integration control, and vice versa. It follows from (7) that the output of the fuzzy controller is(3)3. The parameter adaptive methodThus the fuzzy controller behaves like a time-varying PID controller, its equivalent proportional control, integral control and derivative control components are respectively. We call this new controller structure a PID type fuzzy controller (PID fc). Figs. 7 and 8 are the simulation results of the system's step response of such control system. The influence of ~ and fl to the system performance is illustrated. When ~ > 0 and/3 = 0, meaning that the fuzzy controller behaves like PD fc, there exist a steady-state error. When ~ = 0 and fl > 0, meaning that the fuzzy controller behaves like a PI fc, the steady-state error of the system is eliminated but there is a large overshoot and serious oscillation.When ~ > 0 and 13 > 0 the fuzzy controller becomes a PID fc, the overshoot is substantially reduced. It is possible to get a comparatively good performance by carefully choosing the value of αandβ.4. ConclusionsWe have studied the input-output behavior of the product-sum crisp type fuzzy controller, revealing that this type of fuzzy controller behaves approximately like a parameter time-varying PD controller. Therefore, the analysis and designing of a fuzzy control system can take advantage of the conventional PID control theory. According to the coventional PID control theory, we have been able to propose some improvement methods for the crisp type fuzzy controller.It has been illustrated that the PD type fuzzy controller yields a steady-state error for the type system, the PI type fuzzy controller can eliminate the steady-state error. We proposed a controller structure, that combines the features of both PD type and PI type fuzzy controller, obtaining a PID type fuzzy controller which allows the control system to have a fast rise and a small overshoot as well as a short settling time.To improve further the performance of the proposed PID type fuzzy controller, the authors designed a parameter adaptive fuzzy controller. The PID type fuzzy controller can be decomposed into the equivalent proportional control, integral control and the derivative control components. The proposed parameter adaptive fuzzy controller decreases the equivalent integral control component of the fuzzy controller gradually with the system response process time, so as to increase the damping of the system when the system is about to settle down, meanwhile keeps the proportional control component unchanged so as to guarantee quick reaction against the system's error. With the parameter adaptive fuzzy controller, the oscillation of the system is strongly restrained and the settling time is shortened considerably.We have presented the simulation results to demonstrate the fine performance of the proposed PID type fuzzy controller and the parameter adaptive fuzzy controller structure.Part 2 Application of self adaptation fuzzy-PID control for main steam temperature control system inpower stationZHI-BIN LIAbstract: In light of the large delay, strong inertia, and uncertainty characteristics of main steam temperature process, a self adaptation fuzzy-PID serial control system is presented, which not only contains the anti-disturbance performance of serial control, but also combines the good dynamic performance of fuzzy control. The simulation results show that this control system has more quickly response, better precision and stronger anti-disturbance ability.Keywords:Main steam temperature;Self adaptation;Fuzzy control;Serial control1. IntroductionThe boiler superheaters of modem thermal power station run under the condition of high temperature and high pressure, and the superheater’s temperature is highest in the steam channels.so it has important effect to the running of the whole thermal power station.If the temperature is too high, it will be probably burnt out. If the temperature is too low ,the efficiency will be reduced So the main steam temperature mast be strictly controlled near the given value.Fig l shows the boiler main steam temperature system structure.Fig.1 boiler main steam temperature systemIt can be concluded from Fig l that a good main steam temperature controlsystem not only has adequately quickly response to flue disturbance and load fluctuation, but also has strong control ability to desuperheating water disturbance. The general control scheme is serial PID control or double loop control system with derivative. But when the work condition and external disturbance change large, the performance will become instable. This paper presents a self adaptation fuzzy-PID serial control system. which not only contains the anti-disturbance performance of serial control, but also combines the good dynamic character and quickly response of fuzzy control .1. Design of Control SystemThe general regulation adopts serial PID control system with load feed forward .which assures that the main steam temperature is near the given value 540℃in most condition .If parameter of PID control changeless and the work condition and external disturbance change large, the performance will become in stable .The fuzzy control is fit for controlling non-linear and uncertain process. The general fuzzy controller takes error E and error change ratio EC as input variables .actually it is a non-linear PD controller, so it has the good dynamic performance .But the steady error is still in existence. In linear system theory, integral can eliminate the steady error. So if fuzzy control is combined with PI control, not only contains the anti-disturbance performance of serial control, but also has the good dynamic performance and quickly response.In order to improve fuzzy control self adaptation ability, Prof .Long Sheng-Zhao and Wang Pei-zhuang take the located in bringing forward a new idea which can modify the control regulation online .This regulation is:]1,0[,)1(∈-+=αααEC E UThis control regulation depends on only one parameter α.Once αis fixed .the weight of E and EC will be fixed and the self adaptation ability will be very small .It was improved by Prof. Li Dong-hui and the new regulation is as follow;]1,0[,,,3,)1(2,)1(1,)1(0,)1({321033221100∈±=-+±=-+±=-+=-+=ααααααααααααE EC E E EC E E EC E E EC E UBecause it is very difficult to find a self of optimum parameter, a new method is presented by Prof .Zhou Xian-Lan, the regulation is as follow:)0(),ex p(12>--=k ke αBut this algorithm still can not eliminate the steady error .This paper combines this algorithm with PI control ,the performance is improved .2. Simulation of Control System3.1 Dynamic character of controlled objectPapers should be limited to 6 pages Papers longer than 6 pages will be subject to extra fees based on their length .Fig .2 main steam temperature control system structureFig 2 shows the main steam temperature control system structure ,)(),(21s W s W δδare main controller and auxiliary controller,)(),(21s W s W o o are characters of the leading and inertia sections,)(),(21s W s W H H are measure unit.3.2 Simulation of the general serial PID control systemThe simulation of the general serial PID control system is operated by MATLAB, the simulation modal is as Fig.3.Setp1 and Setp2 are the given value disturbance and superheating water disturb & rice .PID Controller1 and PID Controller2 are main controller and auxiliary controller .The parameter value which comes from references is as follow :667.37,074.0,33.31)(25)(111111122===++===D I p D I p p k k k s k sk k s W k s W δδFig.3. the general PID control system simulation modal3.3 Simulation of self adaptation fuzzy-PID control system SpacingThe simulation modal is as Fig 4.Auxiliary controller is:25)(22==p k s W δ.Main controller is Fuzzy-PI structure, and the PI controller is:074.0,33.31)(11111==+=I p I p k k s k k s W δFuzzy controller is realized by S-function, and the code is as fig.5.Fig.4. the fuzzy PID control system simulation modalFig 5 the S-function code of fuzzy control3.4 Comparison of the simulationGiven the same given value disturbance and the superheating water disturbance,we compare the response of fuzzy-PID control system with PID serial control system. The simulation results are as fig.6-7.From Fig6-7,we can conclude that the self adaptation fuzzy-PID control system has the more quickly response, smaller excess and stronger anti-disturbance.4. Conclusion(1)Because it combines the advantage of PID controller and fuzzy controller, theself adaptation fuzzy-PID control system has better performance than the general PID serial control system.(2)The parameter can self adjust according to the error E value. so this kind of controller can harmonize quickly response with system stability.Part 3 Neuro-fuzzy generalized predictive controlof boiler steam temperatureXiangjie LIU, Jizhen LIU, Ping GUANAbstract: Power plants are nonlinear and uncertain complex systems. Reliable control of superheated steam temperature is necessary to ensure high efficiency and high load-following capability in the operation of modern power plant. A nonlinear generalized predictive controller based on neuro-fuzzy network (NFGPC) is proposed in this paper. The proposed nonlinear controller is applied to control the superheated steam temperature of a 200MW power plant. From the experiments on the plant and the simulation of the plant, much better performance than the traditional controller is obtained.Keywords: Neuro-fuzzy networks; Generalized predictive control; Superheated steam temperature1. IntroductionContinuous process in power plant and power station are complex systems characterized by nonlinearity, uncertainty and load disturbance. The superheater is an important part of the steam generation process in the boiler-turbine system, where steam is superheated before entering the turbine that drives the generator. Controlling superheated steam temperature is not only technically challenging, but also economically important.From Fig.1,the steam generated from the boiler drum passes through the low-temperature superheater before it enters the radiant-type platen superheater. Water is sprayed onto the steam to control the superheated steam temperature in both the low and high temperature superheaters. Proper control of the superheated steam temperature is extremely important to ensure the overall efficiency and safety of the power plant. It is undesirable that the steam temperature is too high, as it can damage the superheater and the high pressure turbine, or too low, as it will lower the efficiency of the power plant. It is also important to reduce the temperaturefluctuations inside the superheater, as it helps to minimize mechanical stress that causes micro-cracks in the unit, in order to prolong the life of the unit and to reduce maintenance costs. As the GPC is derived by minimizing these fluctuations, it is amongst the controllers that are most suitable for achieving this goal.The multivariable multi-step adaptive regulator has been applied to control the superheated steam temperature in a 150 t/h boiler, and generalized predictive control was proposed to control the steam temperature. A nonlinear long-range predictive controller based on neural networks is developed into control the main steam temperature and pressure, and the reheated steam temperature at several operating levels. The control of the main steam pressure and temperature based on a nonlinear model that consists of nonlinear static constants and linear dynamics is presented in that.Fig.1 The boiler and superheater steam generation process Fuzzy logic is capable of incorporating human experiences via the fuzzy rules. Nevertheless, the design of fuzzy logic controllers is somehow time consuming, as the fuzzy rules are often obtained by trials and errors. In contrast, neural networks not only have the ability to approximate non-linear functions with arbitrary accuracy, they can also be trained from experimental data. The neuro-fuzzy networks developed recently have the advantages of model transparency of fuzzy logic and learning capability of neural networks. The NFN is have been used to develop self-tuning control, and is therefore a useful tool for developing nonlinear predictive control. Since NFN is can be considered as a network that consists of several local re-gions, each of which contains a local linear model, nonlinear predictive control based onNFN can be devised with the network incorporating all the local generalized predictive controllers (GPC) designed using the respective local linear models. Following this approach, the nonlinear generalized predictive controllers based on the NFN, or simply, the neuro-fuzzy generalized predictive controllers (NFG-PCs)are derived here. The proposed controller is then applied to control the superheated steam temperature of the 200MW power unit. Experimental data obtained from the plant are used to train the NFN model, and from which local GPC that form part of the NFGPC is then designed. The proposed controller is tested first on the simulation of the process, before applying it to control the power plant.2. Neuro-fuzzy network modellingConsider the following general single-input single-output nonlinear dynamic system:),1(),...,(),(),...,1([)(''+-----=uy n d t u d t u n t y t y f t y ∆+--/)()](),...,1('t e n t e t e e (1)where f[.]is a smooth nonlinear function such that a Taylor series expansion exists, e(t)is a zero mean white noise and Δis the differencing operator,''',,e u y n n n and d are respectively the known orders and time delay of the system. Let the local linear model of the nonlinear system (1) at the operating point )(t o be given by the following Controlled Auto-Regressive Integrated Moving Average (CARIMA) model:)()()()()()(111t e z C t u z B z t y z A d ----+∆= (2) Where )()(),()(1111----∆=z andC z B z A z A are polynomials in 1-z , the backward shift operator. Note that the coefficients of these polynomials are a function of the operating point )(t o .The nonlinear system (1) is partitioned into several operating regions, such that each region can be approximated by a local linear model. Since NFN is a class of associative memory networks with knowledge stored locally, they can be applied to model this class of nonlinear systems. A schematic diagram of the NFN is shown in Fig.2.B-spline functions are used as the membership functions in theNFN for the following reasons. First, B-spline functions can be readily specified by the order of the basis function and the number of inner knots. Second, they are defined on a bounded support, and the output of the basis function is always positive, i.e.,],[,0)(j k j j k x x λλμ-∉=and ],[,0)(j k j j k x x λλμ-∈>.Third, the basis functions form a partition of unity, i.e.,.][,1)(min,∑∈≡j mam j k x x x x μ(3)And fourth, the output of the basis functions can be obtained by a recurrence equation.Fig. 2 neuro-fuzzy network The membership functions of the fuzzy variables derived from the fuzzy rules can be obtained by the tensor product of the univariate basis functions. As an example, consider the NFN shown in Fig.2, which consists of the following fuzzy rules: IF operating condition i (1x is positive small, ... , and n x is negative large),THEN the output is given by the local CARIMA model i:...)()(ˆ...)1(ˆ)(ˆ01+-∆+-++-=d t u b n t y a t y a t yi i a i in i i i a )(...)()(c i in i b i in n t e c t e n d t u b c b -+++--∆+ (4)or )()()()()(ˆ)(111t e z C t u z B z t yz A i i i i d i i ----+∆= (5) Where )()(),(111---z andC z B z A i i i are polynomials in the backward shift operator 1-z , and d is the dead time of the plant,)(t u i is the control, and )(t e i is a zero mean independent random variable with a variance of 2δ. The multivariate basis function )(k i x a is obtained by the tensor products of the univariate basis functions,p i x A a nk k i k i ,...,2,1,)(1==∏=μ (6)where n is the dimension of the input vector x , and p , the total number of weights in the NFN, is given by,∏=+=nk i i k R p 1)( (7)Where i k and i R are the order of the basis function and the number of inner knots respectively. The properties of the univariate B-spline basis functions described previously also apply to the multivariate basis function, which is defined on the hyper-rectangles. The output of the NFN is,∑∑∑=====p i i i p i ip i i i a y aa yy 111ˆˆˆ (8) 3. Neuro-fuzzy modelling and predictive control of superheatedsteam temperatureLet θbe the superheated steam temperature, and θμ, the flow of spray water to the high temperature superheater. The response of θcan be approximated by a second order model:The linear models, however, only a local model for the selected operating point. Since load is the unique antecedent variable, it is used to select the division between the local regions in the NFN. Based on this approach, the load is divided into five regions as shown in Fig.3,using also the experience of the operators, who regard a load of 200MW as high,180MW as medium high,160MW as medium,140MW as medium low and 120MW as low. For a sampling interval of 30s , the estimated linear local models )(1-z A used in the NFN are shown in Table 1.Fig. 3 Membership function for local modelsTable 1 Local CARIMA models in neuro-fuzzy modelCascade control scheme is widely used to control the superheated steam temperature. Feed forward control, with the steam flow and the gas temperature as inputs, can be applied to provide a faster response to large variations in these two variables. In practice, the feed forward paths are activated only when there are significant changes in these variables. The control scheme also prevents the faster dynamics of the plant, i.e., the spray water valve and the water/steam mixing, from affecting the slower dynamics of the plant, i.e., the high temperature superheater. With the global nonlinear NFN model in Table 1, the proposed NFGPC scheme is shown in Fig.4.Fig. 4 NFGPC control of superheated steam temperature with feed-for-ward control.As a further illustration, the power plant is simulated using the NFN model given in Table 1,and is controlled respectively by the NFGPC, the conventional linear GPC controller, and the cascaded PI controller while the load changes from 160MW to 200MW.The conventional linear GPC controller is the local controller designed for the“medium”operating region. The results are shown in Fig.5,showing that, as expected, the best performance is obtained from the NFGPC as it is designed based on a more accurate process model. This is followed by the conventional linear GPC controller. The performance of the conventional cascade PI controller is the worst, indicating that it is unable to control satisfactory the superheated steam temperature under large load changes. This may be the reason for controlling the power plant manually when there are large load changes.Fig.5 comparison of the NFGPC, conventional linear GPC, and cascade PI controller.4. ConclusionsThe modeling and control of a 200 MW power plant using the neuro-fuzzy approach is presented in this paper. The NFN consists of five local CARIMA models.The out-put of the network is the interpolation of the local models using memberships given by the B-spline basis functions. The proposed NFGPC is similarly constructed, which is designed from the CARIMA models in the NFN. The NFGPC is most suitable for processes with smooth nonlinearity, such that its full operating range can be partitioned into several local linear operating regions. The proposed NFGPC therefore provides a useful alternative for controlling this class of nonlinear power plants, which are formerly difficult to be controlled using traditional methods.Part 4 为Part3译文:锅炉蒸汽温度模糊神经网络的广义预测控制Xiangjie LIU, Jizhen LIU, Ping GUAN摘要:发电厂是非线性和不确定性的复杂系统。
电气工程及其自动化专业英语第一章课文翻译
第一章第一篇sectiongTwo variables u(t) and i(t) are the most basic concepts in an electric circuit, they characterize the various relationships in an electric circuitu(t)和i(t)这两个变量是电路中最基本的两个变量,它们刻划了电路的各种关系。
the charge e on an electron is negative and equal in magnitude to 1.60210×10 19C, while a proton carries a positive charge of the same magnitude as the electron. The presence of equal numbers of protons and electrons leaves an atom neutrally charged. 我们从基础物理得知一切物质是由被称为原子的基本构造部分组成的,并且每个原子是由电子,质子和中子组成的。
我们还知道电子的电量是负的并且在数值上等于 1.602100×10-12C,而质子所带的正电量在数值上与电子相等。
质子和电子数量相同使得原子呈现电中性。
We consider the flow of electric charges. A unique feature offlow of negative charges, as Fig.l-1 illustrates. This convention was introduced by Benjamin Franklin (l706~l790), the American scientist and inventor. Although we now know that current in metallic conductors is due to negatively charged electrons, we will follow the universally accepted conventionthat current is the net flow of positive charges. Thus, Electriccurrent is the time rate of charge, measured in amperes (A).Mathematically, the relationship among current i , charge q , andtime t is 当我们把一根导线连接到某一电池上时(一种电动势源),电荷被外力驱使移动;正电荷朝一个方向移动而负电荷朝相反的方向time in several ways that may be represented by different kindsof mathematical functions 我们通过方程(1-1)定义电流的方式表明电流不必是一个恒值函数,电荷可以不同的方式随时间而变化,这些不同的方式可用各种数学函数表达出来。
电气工程及其自动化专业_外文文献_英文文献_外文翻译_plc方面.
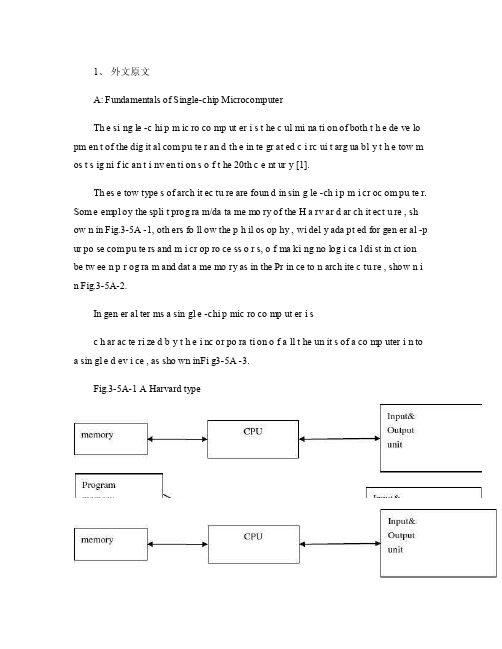
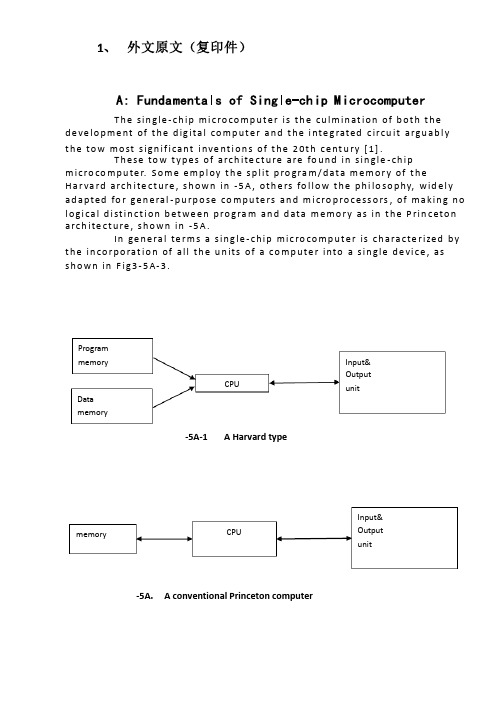
1、外文原文A: Fundamentals of Single-chip MicrocomputerTh e si ng le -c hi p m ic ro co mp ut er i s t he c ul mi na ti on of both t h e de ve lo pm en t of the dig it al com pu te r an d th e in te gr at ed c i rc ui t arg ua bl y t h e tow m os t s ig ni f ic an t i nv en ti on s o f t he 20th c e nt ur y [1].Th es e tow type s of arch it ec tu re are foun d in sin g le -ch i p m i cr oc om pu te r. Som e empl oy the spli t prog ra m/da ta me mo ry of the H a rv ar d ar ch it ect u re , sh ow n in Fig.3-5A -1, oth ers fo ll ow the p h il os op hy , wi del y ada pt ed for gen er al -p ur po se com pu te rs and m i cr op ro ce ss o r s, o f ma ki ng no log i ca l di st in ct ion be tw ee n p r og ra m and dat a me mo ry as in the Pr in ce to n arch ite c tu re , show n i n Fig.3-5A-2.In gen er al ter ms a sin gl e -chi p mic ro co mp ut er i sc h ar ac te ri zed b y t he i nc or po ra ti on of a ll t he un it s of a co mp uter i n to a sin gl e d ev i ce , as sho wn inFi g3-5A -3.Fig.3-5A-1 A Harvard typeFig.3-5A-2. A conventional Princeton computerFig3-5A-3. Principal features of a microcomputerRead only memory (ROM.R OM is usua ll y for the pe rm an ent,n o n-vo la ti le stor a ge of an app lic a ti on s pr og ra m .M an ym i cr oc om pu te rs and m are inte nd e d for high -v ol um e ap pl ic at ions a n d he nc e t h e eco n om ic al man uf act u re of th e de vic e s re qu ir es t h at t he cont en t s o f t he prog ra m me m or y be co mm it t ed perm a ne ntly d u ri ng the man ufa c tu re of ch ip s .Cl ea rl y, thi s im pl ie s a r i go ro us app ro ach to ROM cod e deve l op me nt sin ce cha ng es can not b e mad e afte r manu f a c tu re .Th is dev e lo pm en t proc ess may invo lv e e m ul at io n us in g aso ph is ti ca te d de ve lo pm en t sy ste m wit h a h a rd wa re emu la tio n cap ab il it y as w el l as the use o f po we rf ul s o ft wa re too ls.So me man uf act u re rs pro vi de add it io na l RO M opt i on s by i n cl ud in g in their ra n ge dev ic es wit h (or int en de d fo r use wit h u s er pro gr am ma ble me mo ry. Th e sim p le st of th es e is usu al ly d e vi ce whi ch can op er at e in a micro p ro ce ssor mod e by usi ng som e o f the inp ut /outp u t li ne s as an ad dr es s an d da ta b us fora c ce ss in g ex te rna l mem or y. Thi s t y pe of de vi ce can beh av ef u nc ti on al ly as th e sing le chip mi cr oc om pu te r from whi ch it is d e ri ve d al be it wit h re st ri ct ed I/O and a mod if ied ex te rn al c i rc ui t. The use of thes e d ev ic es is com mo n eve n in prod uc ti on c i rc ui ts wher e t he vo lu me does no tj us ti f y t h e d ev el o pm en t c osts o f c us to m o n -ch i p R OM [2];t he re c a n s ti ll bea s ignif i ca nt saving i n I /O and o th er c h ip s com pa re d to a conv en ti on al mi c ro pr oc es sor b a se d ci rc ui t. Mor e ex ac t re pl ace m en t fo r RO M dev i ce s ca n be o b ta in ed in th e fo rm of va ri an ts w it h 'p ig gy -b ack 'E P RO M(Er as ab le pro gr am ma bl e ROM s oc ke ts or dev ic e s with EPROM i n st ea d o f RO M 。
自动化专业英语原文和翻译
自动化专业英语原文和翻译Title: Original Text and Translation of Automation Professional EnglishIntroduction:In the field of automation, it is essential to have a good command of professional English, as many resources and documents are written in English. In this article, we will explore the original text and translation of automation professional English, providing a comprehensive guide for those looking to improve their language skills in this area.1. Original Text and Translation of Automation Terminology1.1 The original text of automation terminology includes terms such as PLC (Programmable Logic Controller), HMI (Human-Machine Interface), and SCADA (Supervisory Control and Data Acquisition).1.2 The translation of these terms into other languages must be accurate and consistent to ensure clear communication in an international context.1.3 It is important for professionals in the automation industry to be familiar with these terms in both English and their native language to facilitate effective communication with colleagues and clients.2. Original Text and Translation of Automation Standards2.1 Automation standards, such as ISO 9001 and IEC 61131, are crucial for ensuring quality and safety in automation systems.2.2 Translating these standards accurately is essential to ensure compliance with regulations and best practices in different countries.2.3 Professionals in the automation industry should be well-versed in the original text of these standards and their translations to ensure the successful implementation of automation projects worldwide.3. Original Text and Translation of Automation Documentation3.1 Automation documentation, including user manuals, technical specifications, and maintenance guides, is often written in English.3.2 Translating this documentation accurately is essential to ensure that users and technicians can understand and operate automation systems effectively.3.3 Professionals in the automation industry should be proficient in both the original text and translated versions of documentation to facilitate training, troubleshooting, and maintenance of automation systems.4. Original Text and Translation of Automation Research Papers4.1 Research papers on automation topics are often published in English-language journals and conferences.4.2 Translating these papers accurately is crucial for sharing knowledge and advancements in the field of automation with a global audience.4.3 Professionals in the automation industry should be able to read and understand original research papers in English and be familiar with translations in other languages to stay informed about the latest developments in the field.5. Original Text and Translation of Automation Software5.1 Automation software, such as CAD (Computer-Aided Design) and CAM (Computer-Aided Manufacturing) programs, often have interfaces and documentation in English.5.2 Translating this software accurately is essential for ensuring that engineers and technicians can use these tools effectively.5.3 Professionals in the automation industry should be proficient in both the original text and translated versions of automation software to maximize their productivity and efficiency in their work.Conclusion:In conclusion, having a good command of professional English in the field of automation is essential for effective communication, compliance with standards, and staying informed about the latest developments. By understanding the original text and translations of automation terminology, standards, documentation, research papers, and software, professionals in the industry can enhance their language skills and excel in their careers.。
自动化专业英语 翻译
1.1In recent years the performance requirements for process plant have become increasingly difficult to satisfy. Stronger competition, tougher (更加严苛的) environmental and safety regulations (法规), and rapidly changing economic conditions have been key factors in the tightening of plant product quality specifications (产品质量规范).A further complication (复杂) is that modern processes have become more difficult to operate because of the trend toward larger, more highly integrated plants with smaller surge capacities (谐振能力) between the various processing units. Such plants give the operators little opportunity to prevent upsets (扰乱) from propagating from one unit to other interconnected units. In view of (考虑到,由于) the increased emphasis placed on safe, efficient plant operation, it is only natural that the subject of process control has become increasingly important in recent years. In fact, without process control it would not be possible to operate most modern processes safely and profitably (有利的), while satisfying plant quality standards.近年来,对过程系统的性能改善需求变得越来越困难.更为激烈的竞争,更加严格的环境和安全规范,以及快速变化的经济条件都是加强工厂产品质量规范的关键因素更为复杂的情况是,由于现代制造业朝着规模更大,集成度更高的方向发展,而使不同的加工环节之间的应变能力更低, 所以加工过程更难控制近年来,考虑到工业制造逐渐加强的安全、高效需求,过程控制这个课题变得越来越受重视. 实际上,对于大多数现代工业,要满足安全、高效,产品质量的要求,没有控制系统是不可能的.It is assumed that the inlet and outlet flow rates are identical (相同的) and that the liquid density ρ (rho) remains consant,that is, the temperature variations are small enough that the temperature dependence of ρ can be neglected. Under these conditions the volu me V of liquid in the tank remains constant.假设输入和输出流量是相等的,并且液体密度保持恒定,也就是说温度变化足够小,密度对温度的影响可以忽略不计. 在这些条件下,槽内液体的体积保持恒定Use a larger tank. If a larger tank is used, fluctuations (波动) in Ti will tend to be damped out (阻尼,衰减) due to the larger thermal capacitance of the tank contents. However, increased volume of tankage would be an expensive solution for an industrial plant due to the increased capital costs of the larger tank.Note that this approach is analogous to the use of water baths in chemistry laboratories where the large thermal capacitance of the bath serves as a heat sink (散热装置) and thus provides an isothermal (恒温的) environment for a small-scale research apparatus (仪器).使用一个更大的槽. 如果使用更大的槽,因为更大的热容,Ti的波动会趋向于衰减. 然而,体积增加使得开支增加,会使工厂系统的解决方案变得更加昂贵.要指出的是这个方法类似于化学实验室中水缸的使用,水缸的大热容量可以看作散热装置,因此可以为小型研究仪器提供一个恒温环境.Note that in feedforward control, the controlled variable T is not measured.在前馈控制中,被控变量T是没有被测量的.1.2The motivation of using feedback, illustrated (说明) by the examples in Section (1), is somewhat oversimplified.In these examples, the use of feedback is shown to be for the purpose of reducing the error between the reference input and the system output.However, the significance of theeffects of feedback in control systems is more complex than is demonstrated by these simple examples.The reduction of system error is merely (仅仅) one of the many important effects that feedback may have upon a system. We show in the following sections that feedback also has effects on such system performance characteristics as stability (稳定性), bandwidth (带宽), overall gain (总增益), disturbance (扰动), and sensitivity (灵敏度).第一节事例中,应用反馈的动机有些过于简单。
电气工程及其自动化专业 外文文献 英文文献 外文翻译 plc方面
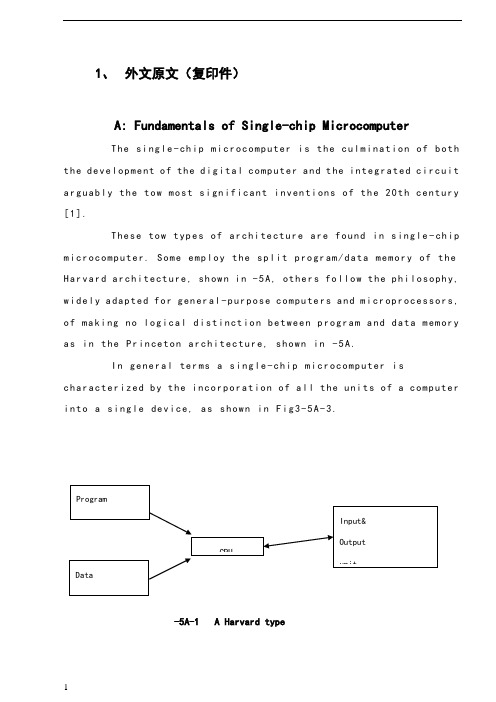
1、外文原文(复印件)A: Fundamentals of Single-chip MicrocomputerTh e si ng le-ch i p mi cr oc om pu ter is t he c ul mi nat i on o f bo th t h e d ev el op me nt o f th e d ig it al com p ut er an d t he int e gr at ed ci rc ui ta r gu ab ly th e t ow m os t s i gn if ic ant i nv en ti on s o f t h e 20t h c en tu ry[1].Th es e to w typ e s of a rc hi te ctu r e ar e fo un d i n s in gl e-ch ip m i cr oc om pu te r. So m e em pl oy t he sp l it p ro gr am/d ata me mo ry o f th e H a rv ar d ar ch it ect u re, sh ow n i n -5A, ot he rs fo ll ow th e ph i lo so ph y, w i de ly a da pt ed fo r g en er al-p ur pos e c om pu te rs an d m i cr op ro ce ss or s, o f m a ki ng no lo gi c al di st in ct io n b e tw ee n p ro gr am a n d da t a m em ory a s i n th e Pr in cet o n ar ch it ec tu re,sh ow n in-5A.In g en er al te r ms a s in gl e-chi p m ic ro co mp ut er i sc h ar ac te ri zed b y the i nc or po ra tio n of al l t he uni t s o f a co mp ut er i n to a s in gl e dev i ce, as s ho wn in Fi g3-5A-3.-5A-1 A Harvard type-5A. A conventional Princeton computerFig3-5A-3. Principal features of a microcomputerRead only memory (ROM).R OM i s u su al ly f or th e p er ma ne nt, n o n-vo la ti le s tor a ge o f an a pp lic a ti on s pr og ra m .M an ym i cr oc om pu te rs an d mi cr oc on tr ol le r s a re in t en de d fo r h ig h-v ol ume a p pl ic at io ns a nd h en ce t he e co nom i ca l ma nu fa ct ure of t he d ev ic es r e qu ir es t ha t the co nt en ts o f the pr og ra m me mo ry b e co mm it te dp e rm an en tl y d ur in g th e m an uf ac tu re o f c hi ps . Cl ear l y, th is im pl ie sa ri g or ou s a pp roa c h t o R OM co de d e ve lo pm en t s in ce c ha ng es ca nn otb e m ad e af te r man u fa ct ur e .T hi s d e ve lo pm en t pr oce s s ma y in vo lv e e m ul at io n us in g a s op hi st ic at ed deve lo pm en t sy st em w i th a ha rd wa re e m ul at io n ca pa bil i ty a s we ll a s th e u se of po we rf ul so ft wa re t oo ls.So me m an uf act u re rs p ro vi de ad d it io na l RO M opt i on s byi n cl ud in g i n th ei r ra ng e de vi ce s wi th (or i nt en de d fo r us e wi th) u s er pr og ra mm ab le m em or y. Th e s im p le st of th es e i s us ua ll y d ev ice w h ic h ca n op er ate in a m ic ro pr oce s so r mo de b y usi n g so me o f th e i n pu t/ou tp ut li ne s as a n ad dr es s an d da ta b us f or acc e ss in g e xt er na l m e mo ry. T hi s t ype o f d ev ic e c an b e ha ve fu nc ti on al l y a s t he si ng le c h ip mi cr oc om pu te r fr om wh ic h i t i s de ri ve d a lb eit w it h r es tr ic ted I/O an d a mo di fie d e xt er na l ci rcu i t. T he u se o f t h es e RO Ml es sd e vi ce s is c om mo n e ve n in p ro du ct io n c ir cu it s wh er e t he v ol um e do es n o t ju st if y th e d e ve lo pm en t co sts of c us to m on-ch i p RO M[2];t he re c a n st il l b e a si g ni fi ca nt s a vi ng in I/O a nd ot he r c hi ps co mp ar ed t o a c on ve nt io nal mi cr op ro ce ss or b as ed c ir cu it. M o re e xa ctr e pl ac em en t fo r RO M d ev ic es c an b e o bt ai ne d in t he f o rm o f va ri an ts w i th 'pi gg y-ba ck'EP RO M(Er as ab le p ro gr am ma bl e ROM)s oc ke ts o rd e vi ce s w it h EP ROM i ns te ad o f R OM 。
自动化专业英语全文翻译
《自动化专业英语教程》-王宏文主编-全文翻译PART 1Electrical and Electronic Engineering BasicsUNIT 1A Electrical Networks ————————————3B Three-phase CircuitsUNIT 2A The Operational Amplifier ———————————5B TransistorsUNIT 3A Logical Variables and Flip-flop ——————————8B Binary Number SystemUNIT 4A Power Semiconductor Devices ——————————11B Power Electronic ConvertersUNIT 5A Types of DC Motors —————————————15B Closed-loop Control of DC DriversUNIT 6A AC Machines ———————————————19B Induction Motor DriveUNIT 7A Electric Power System ————————————22B Power System AutomationPART 2Control TheoryUNIT 1A The World of Control ————————————27B The Transfer Function and the Laplace Transformation —————29 UNIT 2A Stability and the Time Response —————————30B Steady State—————————————————31 UNIT 3A The Root Locus —————————————32B The Frequency Response Methods: Nyquist Diagrams —————33 UNIT 4A The Frequency Response Methods: Bode Piots —————34B Nonlinear Control System 37UNIT 5 A Introduction to Modern Control Theory 38B State Equations 40UNIT 6 A Controllability, Observability, and StabilityB Optimum Control SystemsUNIT 7 A Conventional and Intelligent ControlB Artificial Neural NetworkPART 3 Computer Control TechnologyUNIT 1 A Computer Structure and Function 42B Fundamentals of Computer and Networks 43UNIT 2 A Interfaces to External Signals and Devices 44B The Applications of Computers 46UNIT 3 A PLC OverviewB PACs for Industrial Control, the Future of ControlUNIT 4 A Fundamentals of Single-chip Microcomputer 49B Understanding DSP and Its UsesUNIT 5 A A First Look at Embedded SystemsB Embedded Systems DesignPART 4 Process ControlUNIT 1 A A Process Control System 50B Fundamentals of Process Control 52UNIT 2 A Sensors and Transmitters 53B Final Control Elements and ControllersUNIT 3 A P Controllers and PI ControllersB PID Controllers and Other ControllersUNIT 4 A Indicating InstrumentsB Control PanelsPART 5 Control Based on Network and InformationUNIT 1 A Automation Networking Application AreasB Evolution of Control System ArchitectureUNIT 2 A Fundamental Issues in Networked Control SystemsB Stability of NCSs with Network-induced DelayUNIT 3 A Fundamentals of the Database SystemB Virtual Manufacturing—A Growing Trend in AutomationUNIT 4 A Concepts of Computer Integrated ManufacturingB Enterprise Resources Planning and BeyondPART 6 Synthetic Applications of Automatic TechnologyUNIT 1 A Recent Advances and Future Trends in Electrical Machine DriversB System Evolution in Intelligent BuildingsUNIT 2 A Industrial RobotB A General Introduction to Pattern RecognitionUNIT 3 A Renewable EnergyB Electric VehiclesUNIT 1A 电路电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。
电气工程及其自动化专业外文文献英文文献外文翻译方面
1、 外文原文(复印件)A: Fundamentals of Single-chip MicrocomputerT h e sin gle -ch ip mi c ro co m p u t e r is t h e cu lm in at io n of b ot h t h e d e ve lo p me nt of t h e d ig ita l co m p u t e r a n d t h e i nte g rated c ircu it a rgu ab l y t h e to w mo st s ign if i cant i nve nt i o n s of t h e 20t h c e nt u ry [1].T h ese to w t yp e s of arch ite ct u re are fo u n d in s in gle -ch ip m i cro co m p u te r. S o m e e mp l oy t h e sp l it p ro gra m /d at a m e m o r y of t h e H a r va rd arch ite ct u re , s h o wn in -5A , ot h e rs fo l lo w t h e p h i lo so p hy, wid e l y ad a p ted fo r ge n e ral -p u rp o se co m p u te rs an d m i cro p ro ce ss o rs , of m a kin g n o l o g i ca l d i st in ct i o n b et we e n p ro gra m an d d ata m e m o r y as in t h e P rin c eto n a rch ite ct u re , sh o wn in -5A.In ge n e ra l te r m s a s in g le -ch ip m ic ro co m p u t e r is ch a ra cte r ized b y t h e in co r p o rat io n of all t h e u n its of a co mp u te r into a s in gle d e vi ce , as s h o w n in F i g3-5A-3.-5A-1A Harvard type-5A. A conventional Princeton computerProgrammemory Datamemory CPU Input& Output unitmemoryCPU Input& Output unitResetInterruptsPowerFig3-5A-3. Principal features of a microcomputerRead only memory (ROM).RO M is u su a l l y fo r t h e p e r m an e nt , n o n -vo lat i le sto rage of an ap p l i cat io n s p ro g ram .M a ny m i c ro co m p u te rs a n d m i cro co nt ro l le rs are inte n d ed fo r h i gh -vo lu m e ap p l i cat io n s a n d h e n ce t h e e co n o m i cal man u fa c t u re of t h e d e vi ces re q u ires t h at t h e co nt e nts of t h e p ro gra m me mo r y b e co mm i ed p e r m a n e nt l y d u r in g t h e m a n u fa ct u re of c h ip s . C lea rl y, t h i s imp l ies a r i go ro u s ap p ro a ch to ROM co d e d e ve lo p m e nt s in ce ch an ges can n o t b e mad e af te r m an u fa ct u re .T h i s d e ve l o p m e nt p ro ces s m ay i nvo l ve e mu l at i o n u sin g a so p h ist icated d e ve lo p m e nt syste m wit h a h ard wa re e mu l at i o n capab i l it y as we ll as t h e u s e of p o we rf u l sof t war e to o l s.So m e m an u fa ct u re rs p ro vi d e ad d it i o n a l ROM o p t io n s b y in clu d in g in t h e i r ran ge d e v ic es w it h (o r inte n d ed fo r u s e wit h ) u se r p ro g ram m a b le m e mo r y. T h e s im p lest of t h e se i s u su a l l y d e v i ce wh i ch can o p e rat e in a m i cro p ro ce s so r mo d e b y u s in g s o m e of t h e in p u t /o u t p u t l in es as an ad d res s a n d d ata b u s fo r a cc es sin g exte rn a l m e m o r y. T h is t yp e o f d e vi ce can b e h ave f u n ct i o n al l y as t h e s in gle ch ip m i cro co m p u t e r f ro m wh i ch it i s d e ri ved a lb e it wit h re st r icted I/O an d a m o d if ied exte rn a l c ircu it. T h e u s e of t h e se RO M le ss d e vi ces i s co mmo n e ve n in p ro d u ct io n circu i ts wh e re t h e vo lu m e d o e s n ot ju st if y t h e d e ve lo p m e nt co sts of cu sto m o n -ch ip ROM [2];t h e re ca n st i ll b e a si gn if i cant sav in g in I/O an d o t h e r ch ip s co m pared to a External Timing components System clock Timer/ Counter Serial I/O Prarallel I/O RAM ROMCPUco nve nt io n al m i c ro p ro ces so r b ased circ u it. M o re exa ct re p l a ce m e nt fo rRO M d e v ice s can b e o b tain ed in t h e fo rm of va ria nts w it h 'p i g g y-b a c k'E P ROM(E rasab le p ro gramm ab le ROM )s o cket s o r d e v ice s w it h E P ROMin stead of ROM 。
自动化专业英语第四版课文翻译
自动化专业英语第四版课文翻译Unit 1现在工业电子系统使用的是被称为晶体管的装置。
每一类型的晶体管有区别于其他晶体管的不同特点和操作条件。
在讨论的第一部分,我们来关注双极性晶体管。
从结构上看,这个晶体管被描述为双极性的,是因为它有两个不同的电流载体极性。
空穴是阳极电流载体,而电子是阴极电流载体。
这两个不同性质的半导体晶体通过一个公共部分连接在一起。
这个装置的结构类似于两个二极管背靠背连接,其中一个晶体充当另外两个晶体的公共部分。
中间的材料通常被做得比外面的两片都要薄。
图1.1表示的是此晶体管的结构,原件名称,和不同双极性晶体管的语义符号。
一个双极性晶体管主要被用做放大器来限制流经它的电流。
电流从电源流入发射极,经过基极,再流出集电极。
集电极的电流量通常被定义为晶体管的输出量。
集电极电流由基极电流中的一小部分控制。
这个关系被描述为电流增量或β。
数学表达式如下:电流增量=集电极电流:基极电流。
公式中希腊字母△表示变化的值。
它用来表示当有交流输入时晶体管的响应。
这种类型的状态被称为动态特性。
公式中的△的省略部分表示直流或静态工作条件。
所有从发射极进入晶体管的电流被定义为发射极电流。
集电极电流Ic通常小于Ie。
Ie和Ic的不同归因于基极电流。
从数学角度看,Ib=Ie-IcUnit 2一个运算放大器的内部结构相当复杂,常常包含大量的分立元件。
一个运算放大器的使用者通常不需要关心它的内部结构。
然而,对于如何理解内部电子电路的完成却是有所帮助的。
这就允许使用者来观察设备是如何工作的,以及表明它作为一个功能单元的一些局限性。
运算放大器的内部电子线路可以被分为三个功能单元。
图1.7即是一个运算放大器内部功能的简图。
注意每一个功能都被附在一个三角形内。
电子图表中用三角形来表示放大功能。
这个简图显示了运算放大器有三个基本的放大功能。
这些功能一般叫作放大级。
一个放大级包含一或更多有源器件,所有相联元件需实现放大。
第一阶段或一个运算放大器的输入常常是一个差动放大器。
自动化专业英语第三版王树青第一章翻译

自动化专业英语第三版1.1 介绍过程控制1.近年来,对过程系统的性能改善需求变得越来越困难. 更为激烈的竞争,更加严格的环境和安全规范,以及快速变化的经济条件都是加强工厂产品质量规范的关键因素2.更为复杂的情况是,由于现代制造业朝着规模更大,集成度更高的方向发展,而使不同的加工环节之间的协调能力更低, 所以加工过程更难控制.在这种工厂中,要想让一个生产环节出现的问题不对其相连的另一个生产环节产生影响,几乎是不可能的.3.近年来,考虑到工业制造逐渐加强的安全、高效需求,过程控制这个课题变得越来越受重视.实际上,对于大多数现代工业,要满足安全、高效,产品质量的要求,没有控制系统是不可能的.1.1.1说明性的例子1.图1.1.1 所示的连续加热搅拌器可以作为过程控制的典型例子.输入液态流体的质量流量率为w,温度为Ti. 槽内成分搅拌均匀,并且用电加热器,功率为Q瓦特.2.假设输入和输出流量率是相等的,并且液体密度保持恒定,也就是说温度变化足够小,密度对温度的影响可以忽略不计. 在这些条件下,槽内液体的体积保持恒定3.加热搅拌器的控制目标是保持输出温度T在一个恒定参考值TR上.参考值在控制术语中指的是给定值. 下面我们考虑两个问题.把加热搅拌器内的液体从输入温度Ti加热到输出温度TR,需要多少热量?1.要确定达到设计运行条件下的热量需求,我们需要写下槽内液体的稳定能量平衡式.在写平衡式之前,假设槽内是完美搅拌的,同时忽略热损耗.2.在这些条件下,槽内成分的温度保持一致,因此,输出温度等于槽内液体温度..3.分别表示Ti, T, w, 和 QC 是液体的比热. 我们假设C是恒定的. 在设计条件下,将其代入方程(1),1.方程(2)是加热器的设计方程.如果我们的假设是正确的,同时输入流量和输入温度等于他们的标定值,那么有方程(2)给出的输入热量将使输出温度保持在期望值TR.但是,如果给定条件变化,会产生什么样的结果呢?这给我们带来第二个问题:2.问题2. 假设输入温度Ti随时间变化. 我们如何确保温度T保持或靠近给定值TR?最为一个特殊的例子,假设Ti增加到一个大于的值. 如果Q保持在标定值上恒定,我们可以得到输出温度将增加,因此T>TR.为应付这种情况,有一些可能的策略控制出口温度T方法1。
用专业英语介绍自动化发展的作文
用专业英语介绍自动化发展的作文英文回答:Automation has revolutionized various industries, transforming the way we work and live. It involves the useof technology to perform tasks that were previously done manually, increasing efficiency, productivity, and accuracy. The evolution of automation has been driven by advancements in artificial intelligence (AI), robotics, and data analytics.Historical Development:Early Automation (18th Century): The Industrial Revolution marked the inception of automation with the introduction of mechanical looms and steam engines.Robotic Automation (Mid-20th Century): The development of industrial robots automated complex tasks in manufacturing, automotive, and aerospace industries.Computer-Aided Automation (1970s): Computers played a pivotal role in automating tasks, enabling industries to manage complex processes and systems.Intelligent Automation (21st Century): AI and machine learning technologies have brought about a new era of automation, allowing for cognitive tasks and decision-making to be automated.Current Trends:Cognitive Automation: AI-powered systems can perform complex tasks that require human-like intelligence, such as natural language processing and image recognition.Data-Driven Automation: Advanced analytics and machine learning algorithms automate decision-making based on vast amounts of data.Robotic Process Automation (RPA): Software robots can mimic human actions to automate repetitive and rule-basedtasks.Process Mining: Automation tools leverage data mining techniques to analyze business processes and identify automation opportunities.Applications and Benefits:Increased Efficiency and Productivity: Automation accelerates processes, reduces errors, and frees up human resources for more valuable tasks.Cost Reduction: Automation reduces labor costs and improves resource utilization.Improved Quality: Automated systems can maintain consistent quality standards and reduce product defects.Enhanced Customer Experience: Automated customer service and personalized recommendations improve customer satisfaction.Innovation and Growth: Automation allows organizations to explore new products, services, and markets by freeing up resources for innovation.Challenges and Future Outlook:Job Displacement: Automation can lead to workforce displacement, requiring governments and businesses to address retraining and job creation.Ethical Considerations: Automated systems may raise ethical concerns in areas such as privacy, bias, and accountability.Technological Limitations: Automation is still limited in areas requiring high levels of human creativity, judgment, and empathy.In the future, automation is expected to continue to evolve, driven by advancements in AI, quantum computing, and human-robot collaboration. The integration of automation into various sectors will transform industries,create new job opportunities, and provide unprecedented opportunities for innovation and economic growth.中文回答:自动化的发展。
自动化专业英语教程(王宏文)第二版全文翻译
《自动化专业英语教程》-王宏文-全文翻译PART 1Electrical and Electronic Engineering BasicsUNIT 1A Electrical Networks ————————————3B Three-phase CircuitsUNIT 2A The Operational Amplifier ———————————5B TransistorsUNIT 3A Logical Variables and Flip-flop ——————————8B Binary Number SystemUNIT 4A Power Semiconductor Devices ——————————11B Power Electronic ConvertersUNIT 5A Types of DC Motors —————————————15B Closed-loop Control of DC DriversUNIT 6A AC Machines ———————————————19B Induction Motor DriveUNIT 7A Electric Power System ————————————22B Power System AutomationPART 2Control TheoryUNIT 1A The World of Control ————————————27B The Transfer Function and the Laplace Transformation —————29 UNIT 2A Stability and the Time Response —————————30B Steady State—————————————————31 UNIT 3A The Root Locus —————————————32B The Frequency Response Methods: Nyquist Diagrams —————33 UNIT 4A The Frequency Response Methods: Bode Piots —————34B Nonlinear Control System 37UNIT 5 A Introduction to Modern Control Theory 38B State Equations 40UNIT 6 A Controllability, Observability, and StabilityB Optimum Control SystemsUNIT 7 A Conventional and Intelligent ControlB Artificial Neural NetworkPART 3 Computer Control TechnologyUNIT 1 A Computer Structure and Function 42B Fundamentals of Computer and Networks 43UNIT 2 A Interfaces to External Signals and Devices 44B The Applications of Computers 46UNIT 3 A PLC OverviewB PACs for Industrial Control, the Future of ControlUNIT 4 A Fundamentals of Single-chip Microcomputer 49B Understanding DSP and Its UsesUNIT 5 A A First Look at Embedded SystemsB Embedded Systems DesignPART 4 Process ControlUNIT 1 A A Process Control System 50B Fundamentals of Process Control 52UNIT 2 A Sensors and Transmitters 53B Final Control Elements and ControllersUNIT 3 A P Controllers and PI ControllersB PID Controllers and Other ControllersUNIT 4 A Indicating InstrumentsB Control PanelsPART 5 Control Based on Network and InformationUNIT 1 A Automation Networking Application AreasB Evolution of Control System ArchitectureUNIT 2 A Fundamental Issues in Networked Control SystemsB Stability of NCSs with Network-induced DelayUNIT 3 A Fundamentals of the Database SystemB Virtual Manufacturing—A Growing Trend in AutomationUNIT 4 A Concepts of Computer Integrated ManufacturingB Enterprise Resources Planning and BeyondPART 6 Synthetic Applications of Automatic TechnologyUNIT 1 A Recent Advances and Future Trends in Electrical Machine DriversB System Evolution in Intelligent BuildingsUNIT 2 A Industrial RobotB A General Introduction to Pattern RecognitionUNIT 3 A Renewable EnergyB Electric VehiclesUNIT 1A 电路电路或电网络由以某种方式连接的电阻器、电感器和电容器等元件组成。
自动化专业英语教程第2版王宏文主编翻译PART2

P2U1A The World of Control
第二部分第一单元课文A 控制的世界
控制系统的分类和术语 控制系统可根据系统本 R(s) C(s) 身或其参量进行分类: 控制对象 控制元件 开环和闭环系统(如图 a) 2-1A-1):开环控制系统是 R(s) C(s) 控制行为与输出无关的系统。 控制对象 控制元件 + 而闭环系统,其被控对象的 输入在某种程度上依赖于实 际的输出。因为输出以由反 反馈元件 馈元件决定的一种函数形式 b) 反馈回来,然后被输入减去。 闭环系统通常是指负反馈系 图2-1A-1 开环控制系统和闭环控制系统 统或简称为反馈系统。
P2U1A The World of Control
第二部分第一单元课文A 控制的世界
5. 参考译文
A 控制的世界 简介 控制一词的含义一般是调节、指导或者命令。控制系统大 量存在于我们周围。在最抽象的意义上说,每个物理对象都是 一个控制系统。 控制系统被人们用来扩展自己的能力,补偿生理上的限制, 或把自己从常规、单调的工作中解脱出来,或者用来节省开支。 例如在现代航空器中,功率助推装置可以把飞行员的力量放大, 从而克服巨大的空气阻力推动飞行控制翼面。飞行员的反应速 度太慢,如果不附加阻尼偏航系统,飞行员就无法通过轻微阻 尼的侧倾转向方式来驾驶飞机。自动飞行控制系统把飞行员从 保持正确航向、高度和姿态的连续操作任务中解脱出来。没有 了这些常规操作,飞行员可以执行其他的任务,如领航或通讯, 这样就减少了所需的机组人员,降低了飞行费用。 在很多情况下,控制系统的设计是基于某种理论,而不是 靠直觉或试凑法。控制系统能够用来处理系统对命令、调节或 扰动的动态响应。控制理论的应用基本上有两个方面:动态
July 28, 2007
自动化专业英语原文和翻译

自动化专业英语原文和翻译Automation in the Field of EngineeringIntroduction:Automation plays a crucial role in various industries, including engineering. As a result, proficiency in both English and technical knowledge is essential for professionals in the field of automation. This article will provide an original text and its translation in English, focusing on the importance of automation in engineering.Original Text:自动化是一种通过使用计算机技术和控制系统来实现自动操作和控制的技术。
在工程领域,自动化被广泛应用于诸如创造、能源、交通、通信等各个方面。
自动化技术的发展使得工程师能够更高效地完成任务,提高生产效率,并减少了人为错误的发生。
自动化系统可以用于监控和控制各种设备和过程,从而实现自动化生产线、智能交通系统和智能家居等应用。
自动化在工程领域的应用非常广泛。
例如,在创造业中,自动化系统可以用于自动装配和生产线控制,从而提高产品质量和生产效率。
在能源领域,自动化系统可以用于监控和控制发电厂的运行,实现能源的高效利用。
在交通领域,自动化技术可以应用于智能交通信号灯控制和车辆导航系统,提高交通效率和安全性。
在通信领域,自动化系统可以用于网络管理和故障诊断,确保通信网络的稳定运行。
自动化专业英语翻译:Automation is a technology that enables automatic operations and control through the use of computer technology and control systems. In the field of engineering, automation finds extensive applications in various sectors such as manufacturing, energy, transportation, and communication. The development of automation technology allows engineers to efficiently complete tasks, enhance productivity, and reduce human errors. Automation systems can be used for monitoring and controlling various devices andprocesses, enabling applications such as automated production lines, intelligent transportation systems, and smart homes.Automation finds wide-ranging applications in the field of engineering. For instance, in the manufacturing industry, automation systems can be employed for automated assembly and production line control, thereby improving product quality and productivity. In the energy sector, automation systems can be utilized for monitoring and controlling the operation of power plants, facilitating efficient utilization of energy resources. In the transportation domain, automation technology can be applied to intelligent traffic signal control and vehicle navigation systems, enhancing traffic efficiency and safety. In the communication field, automation systems can be used for network management and fault diagnosis, ensuring stable operation of communication networks.Conclusion:The integration of automation in the field of engineering has revolutionized various industries, enabling efficient and reliable operations. Proficiency in both technical knowledge and English language skills is essential for professionals in the automation field to effectively communicate and implement automation solutions. By harnessing the potential of automation, engineers can optimize processes, improve productivity, and contribute to the advancement of the engineering industry.。
自动化专业中英文对照外文翻译文献
中英文对照外文翻译Automation of professional developmentAutomation in the history of professional development, "industrial automation" professional and "control" professional development of the two main line, "industrial automation" professional from the first "industrial enterprises electrified" professional.In the 1950s, the New China was just founded, the 100-waste question, study the Soviet Union established system of higher education, Subdivision professional. Corresponding to the country in the construction of industrial automation and defense, military construction in automatic control, successively set up the "electrification of industrial enterprises" professional and "control" professional (at that time in many schools, "Control" professional secrecy is professional) . After several former professional name of evolution (see below), and gradually develop into a "biased towards applications, biased towards strong," Automation, and the latter to maintain professional name of "control" basically unchanged (in the early days also known as the "automatic learning And remote learning, "" Automatic Control System "professional), and gradually develop into a" biased towards theory, biased towards weak, "the automation professional, and come together in 1995, merged into aunified" automatic "professional . In 1998, according to the Ministry of Education announced the latest professional undergraduate colleges and universities directory, adjusted, the merger of the new "automated" professional include not only the original "automatic" professional (including "industrial automation" professional and "control" professional ), Also increased the "hydraulic transmission and control of" professional (part), "electrical technology" professional (part) and "aircraft guidance and control of" professional (part).Clearly, one of China's automation professional history of the development of China's higher education actually is a new development of the cause of a microcosm of the history, but also the history of New China industrial development of a miniature. Below "industrial automation" professional development of the main line of this example, a detailed review of its development process in the many professional name change (in real terms in the professional content changes) and its industrial building at the time of the close relationship.First a brief look at the world and China's professional division history. We know that now use the professional division is largely from the 19th century to the beginning of the second half of the first half of the 20th century stereotypes of the engineering, is basically industry (products) for the objects to the division, they have been the image of people Known as the "industry professionals" or "trade associations." At present the international education system in two categories, with Britain and the United States as the representative of the education system not yet out of "industry professionals" system, but has taken the "generalist" the road of education and the former Soviet Union for Europe (close to the Soviet Union) as the representative The education system, at the beginning of theimplementation of "professionals" education, professional-very small, although reforms repeatedly, but to the current "industry professionals" are still very obvious characteristics.In the 1950s, just after the founding of New China, a comprehensive study and the Soviet Union and sub-professional very small; Since reform and opening up, only to Britain and the United States to gradually as the representative of the education system to move closer, and gradually reduce the professional, the implementation of "generalist" education through a number of professional Restructuring and merger (the total number of professionals from the maximum of 1,343 kinds of gradually reducing the current 249 kinds), although not out of "industry professionals" and "Mei Ming," but many of the colleges and universities, mostly only one of a Professional, rather than the past more than a professional.Before that, China's first professional automation from the National University in 1952 when the first major readjustment of the establishment of professional - electrified professional industrial enterprises. At that time, the Soviet Union assistance to the construction of China's 156 large industrial enterprises, automation of much-needed electrical engineering and technical personnel, and such professional and technical personnel training, and then was very consistent with China's industrial construction. By the 1960s, professional name changed to "industrial electric and automation," the late 1970s when to resume enrollment "Electric Industrial Automation" professional. This is not only professional name changes, but has its profound meaning, it reflects China's industries from "electrified" step by step to the "automatic" into the real history and that part of the development trend of China's automation professional reflects how urgent countries Urgent for the country'seconomic construction services that period of history and development of real direction.1993, after four years of the third revision of the undergraduate professional directories, the State Education Commission issued a call "system integrity, more scientific and reasonable, the harmonization of norms," the "ordinary professional directory of undergraduate colleges and universities." "Electric Industrial Automation" and "production process automation" merger of the two professional electrician to set up a kind of "industrial automation" professional, by the then Ministry of Industry Machinery centralized management colleges and universities to set up industrial automation teaching guide at the Commission, responsible for the "Industrial Automation "professional teaching and guiding work at the same time," Control "was attributable to the professional category of electronic information, the then Ministry of Industry of electronic centralized management control to set up colleges and universities teaching guide at the Commission, responsible for the" control " Professional teaching guide our work. After the professional adjustment, further defined the "industrial automation" professional and "control" professional "- both strong and weak, hardware and software into consideration and control theory and practical system integration, and the movement control, process control and other targets of control "The common characteristics with the training objectives, but also the basic set of" industrial automation "biased towards strong, professional, biased towards applications," Control "professional biased towards weak, biased towards the theory of professional characteristics and pattern of division of labor. 1995, the State Education Commission promulgated the "(University) undergraduate engineering leading professional directory", the electrical category "industrialautomation" professional and the original electronic information such as "control" of professional electronic information into a new category of "automatic" professional . As this is the leading professional directory, are not enforced, coupled with general "industrial automation" strong or weak, both professional "into" a weak professional category of electronic information is not conducive to professional development and thus many Schools remain "industrial automation" professional and "control" the situation of professional co-exist. Since 1996 more, again commissioned by the Ministry of National Education Ministry of Industry and electronic machinery industries of other parts of the establishment of the new session (second session) centralized management guidance at the University Teaching Commission, making the leading professionals have not been effective Implemented.1998, to meet the country's economic construction of Kuan Koujing personnel training needs, further consolidation of professional and international "generalist" education track by the Ministry of Education announced a fourth revision of the latest "Universities Undergraduate Catalog." So far in the use of the directory, the total number of professionals from the third amendments to the 504 kinds of substantially reduced to 249 species, the original directory is strong, professional electrician and a weak professional category such as electronics and information into categories Electric power, the unity of Information, a former electrician at the same time kind of "industrial automation" professional and the type of electronic information "control" professional formal merger, together with the "hydraulic transmission and control of" professional (part) , "Electric technology" professional (part) and "aircraft guidance and controlof" professional (part), the composition of the new (enforcement) are electrical information such as "automatic" professional. According to statistics, so far the country has more than 200 colleges and universities set up this kind of "automatic" professional. If the name of automation as part of their professional expertise (such as "electrical engineering and automation," "mechanical design and manufacturing automation," "agricultural mechanization and automation" and other professionals) included Automation has undoubtedly is the largest in China A professional.Of the characteristics of China's automation professional:Recalling China's professional history of the development of automation, combined with the corresponding period of the construction of China's national economy to the demand for automation and automated the development of the cause, it is not difficult to sum up following professional characteristics:(1) China's automation professional is not only a relatively long history (since 1952 have been more than 50 years), and from the first day of the establishment of professional automation, has been a professional one of the countries in urgent need, therefore the number of students has also been The largest and most employers welcome the allocation of the professional one.(2) China's automation is accompanied by a professional from the electrification of China's industrial automation step by step to the development of stable development, professional direction and the main content from the first prominent electrified "the electrification of industrial enterprises" step by step for the development of both the electric and automation " Industrial electric and automation ", highlighting the electrical automation" Electric Industrial Automation "and prominent automation" industrial automation ", then the merger of professional education reform in1995 and" control "of professional content into a broader" automated " Professional. From which we can see that China's automation professional Although the initial study in the Soviet education system established under the general environment, but in their development and the Soviet Union or the United States and Britain did not copy the mode, but with China's national conditions (to meet national needs for The main goal) from the innovation and development of "cross-industry professionals," features the professional.自动化专业的发展自动化专业的发展历史中,有“工业自动化”专业与“自动控制”专业两条发展主线,其中“工业自动化”专业最早源于“工业企业电气化”专业。
3-电气工程及其自动化专业 外文文献 英文文献 外文翻译

3-电气工程及其自动化专业外文文献英文文献外文翻译1、外文原文(复印件)A: Fundamentals of Single-chip MicrocomputerThe single-chip microcomputer is the culmination of both the development of the digital computer and the integrated circuit arguably the tow most significant inventions of the 20th century [1].These tow types of architecture are found in single-chip microcomputer. Some employ the split program/data memory of the Harvard architecture, shown in Fig.3-5A-1, others follow the philosophy, widely adapted for general-purpose computers and microprocessors, of making no logical distinction between program and data memory as in the Princeton architecture, shown in Fig.3-5A-2.In general terms a single-chip microcomputer is characterized by the incorporation of all the units of a computer into a single device, as shown in Fig3-5A-3.ProgramInput& memoryOutputCPU unitDatamemoryFig.3-5A-1 A Harvard typeInput&Output CPU memoryunitFig.3-5A-2. A conventional Princeton computerExternal Timer/ System Timing Counter clock componentsSerial I/OReset ROMPrarallelI/OInterrupts RAMCPUPowerFig3-5A-3. Principal features of a microcomputerRead only memory (ROM).ROM is usually for the permanent,non-volatile storage of an applications program .Many microcomputers and microcontrollers are intended for high-volume applications and hence the economical manufacture of the devices requires that the contents of the program memory be committed permanently during the manufacture of chips . Clearly, this implies a rigorous approach to ROM code development since changes cannot be made after manufacture .This development process may involve emulation using a sophisticated development system with a hardware emulation capability as well as the use of powerful software tools.Some manufacturers provide additional ROM options by including in their range devices with (or intended for use with) user programmablememory. The simplest of these is usually device which can operate in a microprocessor mode by using some of the input/output lines as an address and data bus for accessing external memory. This type of device can behave functionally as the single chip microcomputer from which itis derived albeit with restricted I/O and a modified external circuit. The use of these ROMlessdevices is common even in production circuits where the volume does not justify the development costs of custom on-chip ROM[2];there canstill be a significant saving in I/O and other chips compared to a conventional microprocessor based circuit. More exact replacement for ROM devices can be obtained in the form of variants with 'piggy-back' EPROM(Erasable programmable ROM )sockets or devices with EPROM instead of ROM 。
机械设计制造及其自动化毕业论文中英文资料外文翻译
机械设计创造及其自动化毕业论文外文文献翻译INTEGRATION OF MACHINERY译文题目专业机械设计创造及其自动化外文资料翻译INTEGRATION OF MACHINERY(From ELECTRICAL AND MACHINERY INDUSTRY)ABSTRACTMachinery was the modern science and technology development inevitable result, this article has summarized the integration of machinery technology basic outline and the development background .Summarized the domestic and foreign integration of machinery technology present situation, has analyzed the integration of machinery technology trend of development.Key word: integration of machinery ,technology, present situation ,product t,echnique of manufacture ,trend of development0. Introduction modern science and technology unceasing development, impelled different discipline intersecting enormously with the seepage, has caused the project domain technological revolution and the transformation .In mechanical engineering domain, because the microelectronic technology and the computer technology rapid development and forms to the mechanical industry seepage the integration of machinery, caused the mechanical industry the technical structure, the product organization, the function and the constitution, the production method and the management systemof by machinery for the characteristic integration ofdevelopment phase.1. Integration of machinery outline integration of machinery is refers in the organization new owner function, the power function, in the information processing function and the control function introduces the electronic technology, unifies the system the mechanism and the computerization design and the software which constitutes always to call. The integration of machinery development also has become one to have until now own system new discipline, not only develops along with the science and technology, but also entrusts with the new content .But its basic characteristic may summarize is: The integration of machinery is embarks from the system viewpoint, synthesis community technologies and so on utilization mechanical technology, microelectronic technology, automatic control technology, computer technology, information technology, sensing observation and control technology, electric power electronic technology, connection technology, information conversion technology as well as software programming technology, according to the system function goal and the optimized organization goal, reasonable disposition and the layout various functions unit, in multi-purpose, high grade, redundant reliable, in the low energy consumption significance realize the specific function value, and causes the overall system optimization the systems engineering technology .From this produces functional system, then becomes an integration of machinery systematic or the integration of machinery product. Therefore, of coveringtechnology is based on the above community technology organic fusion one kind of comprehensive technology, but is not mechanical technical, the microelectronic technology as well as other new technical simple combination, pieces together .This is the integration of machinery and the machinery adds the machinery electrification which the electricity forms in the concept basic difference .The mechanical engineering technology has the merely technical to develop the machinery electrification, still was the traditional machinery, its main function still was replaces with the enlargement physical strength .But after develops the integration of machinery, micro electron installment besides may substitute for certain mechanical parts the original function, but also can entrust with many new functions,like the automatic detection, the automatic reduction information, demonstrate the record, the automatic control and the control automatic diagnosis and the protection automatically and so on .Not only namely the integration of machinery product is human's hand and body extending, human's sense organ and the brains look, has the intellectualized characteristic is the integration of machinery and the machinery electrification distinguishes in the function essence.2. Integration of machinery development condition integration of machinery development may divide into 3 stages roughly.20th century 60's before for the first stage, this stage is called the initial stage .In this time, the people determination not on own initiative uses the electronic technology the preliminary achievement to consummate the mechanical product the performance .Specially in Second World War period, the war has stimulated the mechanical product and the electronic technology union, these mechanical and electrical union military technology, postwar transfers civilly, to postwar economical restoration positive function .Developed and the development at that time generally speaking also is at the spontaneouscondition .Because at that time the electronic technology development not yet achieved certain level, mechanical technical and electronic technology union also not impossible widespread and thorough development, already developed the product was also unable to promote massively. The 20th century 70~80 ages for the second stage, may be called the vigorous development stage .This time, the computer technology, the control technology, the communication development, has laid the technology base for the integration of machinery development . Large-scale, ultra large scale integrated circuit and microcomputer swift and violent development, has provided the full material base for the integration of machinery development .This time characteristic is :①A mechatronics word first generally is accepted in Japan, probably obtains the quite widespread acknowledgment to 1980s last stages in the worldwide scale ;②The integration of machinery technology and the product obtained the enormous development ;③The various countries start to the integration of machinery technology and the product give the very big attention and the support. 1990s later periods, started the integration of machinery technology the new stagewhich makes great strides forward to the intellectualized direction, the integration of machinery enters the thorough development time .At the same time, optics, the communication and so on entered the integration of machinery, processes the technology also zhan to appear tiny in the integration of machinery the foot, appeared the light integration of machinery and the micro integration of machinery and so on the new branch; On the other hand to the integration of machinery system modeling design, the analysis and the integrated method, the integration of machinery discipline system and the trend of development has all conducted the thorough research .At the same time, because the hugeprogress which domains and so on artificial intelligence technology, neural network technology and optical fiber technology obtain, opened the development vast world for the integration of machinery technology .These research, will urge the integration of machinery further to establish the integrity the foundation and forms the integrity gradually the scientific system. Our country is only then starts from the beginning of 1980s in this aspect to study with the application .The State Councilsummary had considered fully on international the influence which and possibly brought from this about the integration of machinery technology developmenttrend .Many universities, colleges and institutes, the development facility and some large and middle scale enterprises have done the massive work to this technical development and the application, does not yield certain result, but and so on the advanced countries compared with Japan still has the suitable disparity.3. Integration of machinery trend of development integrations of machinery are the collection machinery, the electron, optics, the control, the computer, the information and so on the multi-disciplinary overlapping syntheses, its development and the progress rely on and promote the correlation technology development and the progress .Therefore, the integration of machinery main development direction is as follows:3.1 Intellectualized intellectualizations are 21st century integration of machinery technological development important development directions .Theartificial intelligence obtains day by day in the integration of machinery constructor's research takes, the robot and the numerical control engine bedis to the machine behavior description, is in the control theory foundation, the absorption artificial intelligence, the operations research, the computer science, the fuzzy mathematics, the psychology, the physiology and the chaos dynamics and so on the new thought, the new method, simulate the human intelligence, enable it to have abilities and so on judgment inference, logical thinking, independent decision-making, obtains the higher control goal in order to .Indeed, enable the integration of machinery product to have with the human identical intelligence, is not impossible, also is nonessential .But, the high performance, the high speed microprocessor enable the integration of machinery product to have preliminary intelligent or human's partial intelligences, then is completely possible and essential.In the modern manufacture process, the information has become the control manufacture industry the determining factor, moreover is the most active actuation factor .Enhances the manufacture system information-handling capacity to become the modern manufacture science development a key point .As a result of the manufacture system information organization and structure multi-level, makes the information the gain, the integration and the fusion presents draws up the character, information measure multi-dimensional, as well as information organization's multi-level .In the manufacture information structural model, manufacture information uniform restraint, dissemination processing and magnanimous data aspects and so on manufacture knowledge library management, all also wait for further break through.Each kind of artificial intelligence tool and the computation intelligence method promoted the manufacture intelligence development in the manufacture widespread application .A kind based on the biological evolution algorithm computation intelligent agent, in includes thescheduling problem in the combination optimization solution area of technology, receives the more and more universal attention, hopefully completes the combination optimization question when the manufacture the solution speed and the solution precision aspect breaks through the question scale in pairs the restriction .The manufacture intelligence also displays in: The intelligent dispatch, the intelligent design, the intelligent processing, the robot study, the intelligent control, the intelligent craft plan, the intelligent diagnosis and so on are various These question key breakthrough, may form the product innovation the basic research system. Between 2 modern mechanical engineering front science different science overlapping fusion will have the new science accumulation, the economical development and society's progress has had the new request and the expectation to the science and technology, thus will form the front science .The front science also has solved and between the solution scientific question border area .The front science has the obvious time domain, the domain and the dynamic characteristic .The project front science distinguished in the general basic science important characteristic is it has covered the key science and technology question which the project actual appeared.Manufacture system is a complex large-scale system, for satisfies the manufacture system agility, the fast response and fast reorganization ability, must profit from the information science, the life sciences and the social sciences and so on the multi-disciplinary research results, the exploration manufacture system new architecture, the manufacture pattern and the manufacture system effective operational mechanism .Makes the system optimization the organizational structure and the good movement condition is makes the system modeling , the simulation and the optimized essential target .Not only the manufacture system new architecture to makes the enterprise the agility and may reorganize ability to the demand response ability to have the vital significance, moreover to made the enterprise first floor production equipment the flexibility and may dynamic reorganization ability set a higher request .The biological manufacture view more and more many is introduced the manufacture system, satisfies the manufacture system new request.The study organizes and circulates method and technique of complicated system from the biological phenomenon, is a valid exit which will solve many hard nut to cracks that manufacturing industry face from now on currently .Imitating to living what manufacturing point is mimicry living creature organ of from the organization, from match more, from growth with from evolution etc. function structure and circulate mode of a kind of manufacturing system and manufacturing process.The manufacturing drives in the mechanism under, continuously by one's own perfect raise on organizing structure and circulating mode and thus to adapt the process of[with] ability for the environment .For from descend but the last product proceed together a design and make a craft rules the auto of the distance born, produce system of dynamic state reorganization and product and manufacturing the system tend automatically excellent provided theories foundation and carry out acondition .Imitate to living a manufacturing to belong to manufacturing science and life science of"the far good luck is miscellaneous to hand over", it will produce to the manufacturing industry for 21 centuries huge of influence .机电一体化摘要机电一体化是现代科学技术发展的必然结果,本文简述了机电一体化技术的基本概要和发展背景。
自动化专业英语翻译
Control Engineering and TechnologySome Advances in TechnologyControl engineering is driven by available technology and the pace of the relevant technology advances is now rapid . In this section we mention a few of the advances in technology that currently have ,or will have ,an impact on control engineering . More specific details can be found in the Notes and References at the end of this chapter.1.3 控制工程和技术1.3.1 一些技术上的进步控制工程是由可用的技术和相关技术快速进步的步伐所推动的。
在本节中,我们提到的一些目前拥有或将要拥有的技术进步以及它在控制工程上的影响。
更具体的细节可以在本章末尾的注释和参考中被找到。
note n. 注释,说明;[金融] 票据reference n. [图情] 参考文献;参照;推荐信Integrated and Intelligent SensorsOver the past decade the technology of integrated sensors has been developed . Integrated sensors are built using the techniques of microfabrication originally developed for integrated circuits ; they often include the signal conditioning and interface circuitry on the same chip, in which case they are called intelligent sensors. This signal conditioning might include, for example, temperature compensation. Integrated sensors promise greater reliability and linearity than many conventional sensors, and because they are typically cheaper and smaller than conventional sensors, it will be possible to incorporate many more sensors in the design of control systems than is currently done.集成智能传感器在过去的十年中集成传感器的技术已经得到了发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于神经网络的粒子群优化算法的混乱交通流的快速识别庞明宝张晶晶东方王彦虎交通主管部门土木工程学院河北工业大学中国天津政府pmbpgy@摘要研究表明,神经网络的粒子群优化算法是解决混乱的交通流量的快速识别的有效方法,实证分析的基础上,提出了一种基于对智能交通需求系统和方法所存在的几个问题的混乱识别、智能方法快速判断,在混乱中交通流问题,对这个原理和结构系统作了简要介绍,主要有在线识别模块和离线识别模块,狼方法是通过用脱机识别模块来计算和判断最大李雅普诺夫指数混乱交通流,模型的建立是在线判断利用神经网络的小波包能量特征向量的前时间间隔的时间序列交通流在每个训练样本作为输入变量。
粒子群优化算法被用来确认和更新模型的参数,仿真结果表明,该方法是正确的可行的,它能满足实时需求的混乱交通流量的快速识别。
关键词智能交通系统指挥交通流量混沌层流;神经网络(尼龙) 粒子群优化(PSO);最大李雅普诺夫指数时间进展一介绍通过对非线性的角度科学和混乱交通系统的研究,在交通控制与管理方面是一种新型的科学方法[1]-[5],基本原理是及时的识别混沌,实现抑制交通拥挤和现象提高平面交叉路口的通行能力加入混沌控制信号,但第一步是要实时识别混沌现象交通流量。
有很多方法[6]-[7]来识别混乱,即最大李雅普诺夫指数、关联维数,和就业指数。
所有的方法需要大量的时间序列数据,普通数字时间序列数据比1000还大,否则难以认识混乱现象。
而智能运输系统必须在非常短的时间内完成对混沌判断,而这时需要抓住那个时间的节点,然后要通过具体的控制与引导措施。
虽然混沌现象都能被确认,这是一个小时甚至几个小时后与现有的鉴别方法。
它不能满足要求的快速识别和消失的混乱,实际上就没有意义。
基于那些实时智能控制系统以神经网络算法和粒子群优化算法来识别混乱交通流量。
结果表明,它的刺激方法的正确性和可行性。
二混乱的交通流量的智能识别系统A 基本原理当混乱产生的时候,混乱系统的明显优势之一是介于初始条件和混乱,对于控制混乱的特点的非线性动态系统,当系统进入混乱产生的初始条件时,混乱现象将要出现,不论系统已特殊的条件进入还是初始条件与混乱的关联以一种优先的认识被发现,混乱判断的翻译将会出现问题,当混乱产生的时候,被关注的目标会捕捉到引起快速混乱的时间点。
时间序列的号码将会减少。
我们将会用下面的理论来说明。
第一,当混乱产生的时候,已经证实混乱系统敏感于初始条件和混乱;第二,最初的条件和混乱的关系的确定与随机虽然不是很复杂,混沌的本质是确定随机的外表。
当混乱产生的时候[1]-[5],深入了解初始条件和混乱之间的关系就会发现关系的入口;第三,人工智能方法已经发现了一些复杂的初始条件和混乱之间的关系,即神经网络支持向量机预测模型。
B 结构该系统主要由信息模块、数据库观察样品,在线识别模块,离线识别模块、知识库,结果测试模块。
图1显示了系统的结构。
在探测器适当的位置,信息模块提供时间序列数据的物理量来描述交通流系统,即时间的进展入住,速度和体积,我们称之为数据观测样本数据。
这些数据都存储在观察样品数据库的交通流量。
而这些数据分为两个部分,第一部分作为输入数据的离线识别模块,第二部分是作为输入的在线识别模块。
通过离线辨识混沌识别模块之后会发生的而获得了长时间序列数据的交通流的存在识别交通流混沌状态[3][4],而每一个长时间序列数据观察样品都大于1200。
狼方法被用来计算最大李雅普诺夫指数和判断的混沌的脱机识别模块[6][7]。
通过离线模块,当混乱为了建立一个训练样本在线识别模型而产生的时候,我们能提取出初始条件和混乱之间复杂的关系。
它的特点被视为输入变量而混乱则不被视为输出变量,如果混凝土快速交通系统是或是将会一片混乱地位或在线识别模块收集时间序列数据之前,它可以被快速的判断,一个新的样品被添加到系统之后,混乱在线识别模块的规则可以更新。
三 混乱交通流特征的提取有很多方法可以提取快速交通流时间序列参数的特点,即主成分分析,模糊方法、神经网络[8]-[13],交通流的时间序列是一个不确定性和非稳态过程。
这 频率分布的能量几乎是相关的交通流状况,国际米兰的关系,和时限。
基于小波变换融合算法,小波包分析结果能提供鉴别率从不同时间和子空间的频率。
考虑到其他提取混沌特性的方法和混沌初始条件和混乱之间的敏感性特点,只有使用交通流时间序列数据的前面的时间,我们可以提取三层小波包能量特征向量[12][13]。
标准化的能量特征向量N E 。
],,,,,,,[3736353433323130E E E E E E E E E N =(1) dt S E jj233⎰=(2)j S 3(j = 0、1、2、3、4、5、6、7)是分解树和具体位置j-th 第三节点层的小波节点。
四 利用神经网络在交通流与粒子群优化算法识别 混乱交通流的在线智能模块在网络模块上,我们应该用智能识别方法来画出非线性关系和特征提取结果的关系,由于神经网络模型的强大非线性映射的能力,所以它应用于很多领域[10][11]。
正如我们所知,神经网络有局部微小的问题,收敛速度慢和泛化能力, 和难确定处理单元的数量。
这些影响纠正混沌识别速度,当我们采用了在线神经网络模型,在此基础上采用粒子群优化算法识别并更新参数的神经网络模型。
A 神经网络模型在网络模块给定训练样本集 ),........,2,1)(,(i i Y E i Ni =,R Y R E i Ni ∈∈,8利用非线性函数在高维空间),,,,,,,()(3736353433323130E E E E E E E E f E f y N ==(3)接近样本集。
当y 是最大的李雅普诺夫指数的时候,EN 是交通流时间序列数据先前的时间三层小波包能量特征向量。
在研究组成三层8-9-1应用非线性函数映射的神经网络模型过程中,EN 是明显的输入向量的输入层和y 是输出层。
算法采用混凝土的神经网络,我们可以判断交通系统是混乱状态还是Eqs 。
)](sgn[)sgn(N E f y Z==(4)Z=1或-1。
当Z=1的时候,系统是混乱状态,当Z=-1的时候,系统不是出于混乱状态。
B .参数识别和粒子群优化算法的更新粒子群优化算法被用来确认和更新的参数模型[14]-[16]。
定义j θ是阈值是节点,j 的隐层和γ是输出层的门槛,这表示ij W 是连接节点的重量从i 输入层的隐层节点j ,1j V 的联系的重量从一个节点j 的隐层到输出层节点1。
j B 是隐层节点j 的输出变量。
D 是人口和N 搜索维度是大量的粒子群或人口数量。
表示t 是max t 迭代次数和迭代次数达到最大。
),......,,(211id i i l l l L = 和),......,,(21id i i iv v v v =分别代表位置和速度为解决粒子。
max L 代表边界的位置和max v 代表最大速度的粒子,定义),......,,(21id i i ip p p pbest=是最好的搜索与位置的粒子和gbest 是人类最好的搜索所有粒子的位置,W1的价值权衡通常是惯性选择从0.1到0.9,表示c1和c2都是积极不断的和通常我们选择1C =2C =2,定义随机数字1r 和2r ,表示terror 和tm mse 输出误差对mth 训练样本和所有训练样本的误差,具体步骤如下:步骤1:让t=0和给初值的计算参数如下,1max 0,0,,,,,,r t V v w L id m jmj ij id γθ和2r 。
步骤2:计算粒子适应度值ith 用方程式(3),(5),(6),和神经网络的具体算法。
tmt m t mc y error-=(5)2t)(1mse∑∈=cm t merrorN(6) 步骤3:如果t>max t 或者t mse 小于最小的错误,输出,,,jm j ij v w θ和m γ。
步骤4:比较健康的价值,为所有粒子而得pbest 根据规则和gbest 粒子群算法,所有粒子的速度与位置通过方程式(7),(8)。
)()(22111tid t dtid tidtid t idL gbestr c L pbestr c wV V -⨯+-⨯+=+(7)11+++=t idt idt idVLL(8)步骤5:让t=t+1,更新速度和位置所有粒子,],[max max V V v i -∈和][max max,V V L i -∈。
五 仿真研究本交通流仿真软件对是用于我们的研究的,四百四十多样品高速公路也被制造出来了,每一个交通流时间序列样本数据时间间隔有1000次。
狼方法是通过离线识别模块来计算最大李雅普诺夫指数和判断混乱,前200样本被用来做初始训练样本。
较后240样本通过MATLAB 来更新在线模型而作为测试样本,其中包括前面的32、40、48、 56分别作为时间间隔和时间序列,表1和2归一化能量特征向量显示D 的前40中的时间序列数据部分初始训练样本,从这张表,我们可以看到在交通流能量分布,不同的尺度有不同的结果,分布能量集中在规模7和规模3。
统计价值观具有相对稳定,利用求证,使用小波能量特征向量代替交通流时间序列样本是正确的。
在线神经网络模型用于组成三层贴图非线性函数,让N=12,D=71,maxt =1000和均方误差为0.000097,图2显示变化的状态值,然后才能从1000代开始,包括最优秀的健身价值和平均在每一代适应度值,在对模型参数进行了优化,240份样本后对交通流时间序列是否被识别混乱的状态识别模型的实时更新混乱,表显示正确的三率,包括前32、40、48、 56和64的时间间隔的时间序列,与此同时,下面的结果使:表1 能量特征向量的初始训练的部分样品sample30E 31E 32E 33E1 0.01315 0.01801 0.03739 0.18982 0.02258 0.01596 0.03327 0.100523 0.01763 0.02469 0.02108 0.147624 0.05935 0.03456 0.04201 0.11907 5 0.01531 0.02466 0.02688 0.17801 6 0.02871 0.00707 0.0801 0.10678 7 0.04326 0.02683 0.08182 0.07108 8 0.08795 0.027894 0.00999 0.11952 9 0.0268 0,00962 0.02244 0.18617 100.018570.014370.042180.10445表2 能量特征向量的初始训练的部分样品sample34E35E36E 37E1 0.02033 0.00715 0.0283 0.685882 0.02983 0.0221 0.02707 0.74867 3 0.01038 0.02454 0.0371 0.71736 4 0.02019 0.00534 0.02362 0.695865 0.01822 0.00627 0.02431 0.706356 0.02554 0.00755 0.0534 0.69087 7 0.0517 0.02063 0.05534 0.712318 0.03289 0.01067 0.03385 0.67724 9 0.02772 0.0164 0.02923 0.68163 100.014070.019730.036670.749971)识别是可行的交通流混沌在使用实时智能识别系统与神经网络模型,在获得了样品,我们认识到混乱的交通流在脱机模块。