倒车雷达电路设计
倒车雷达课程设计报告书
2015-2016第一学期单片机课程设计报告题目:倒车雷达设计班级: 13电子科学与技术学号: 130803056 :周健指导老师:袁新娣目录摘要11 绪论21.1 项目研究背景与意义22 总体设计方案与论证22.1 总体方案设计23 硬件实现与单元电路设计33.1 主控制模块33.2 电源设计43.3 超声波测试模块43.3.1 超声波的特性53.3.2 超声波换能器73.4 超声波传感器原理83.5 测距分析123.6 时钟电路的设计133.7 复位电路的设计143.8 声音报警电路的设计143.9 显示模块144 软件设计154.1 主程序工作流程图155总结186参考文献错误!未定义书签。
附录18附件1:原理图18附件2:程序19附件3:元件清单39附件4:实物图错误!未定义书签。
摘要STC89C52是STC系列单片机里应用比较广泛的一款,在自动控制领域里享有很高的价值,以其易用性和多功能性受到了广大电子设计爱好者的好评。
本次设计主要是利用STC89C52单片机、超声波传感器完成测距报警系统的制作,以STC89C52为主控芯片,利用超声波对距离的检测,将前方物体的距离探测出来,然后单片机处理运算,与设定的报警距离值进行比较判断,当测得距离小于设定值时,STC89C52发出指令控制蜂鸣器报警。
关键词:超声波传感器 STC89C521 绪论1.1 项目研究背景与意义由于超声测距是一种非接触检测技术,不受光线、被测对象颜色等的影响,较其它仪器更卫生,更耐潮湿、粉尘、高温、腐蚀气体等恶劣环境,具有少维护、不污染、高可靠、长寿命等特点。
因此可广泛应用于纸业、矿业、电厂、化工业、水处理厂、污水处理厂、农业用水、环保检测、食品(酒业、饮料业、添加剂、食用油、奶制品)、防汛、水文、明渠、空间定位、公路限高等行业中。
可在不同环境中进行距离准确度在线标定,可直接用于水、酒、糖、饮料等液位控制,可进行差值设定,直接显示各种液位罐的液位、料位高度。
简易倒车雷达的初步设计方案
简易倒车雷达的初步设计方案初步设想和设计思路:为了实现车的智能化控制以及考虑到后续的功能扩展,考虑到目前积累的技术知识,电的控制部分决定采用MCS-51单片机,采用ATMEL公司的AT89S52芯片进行控制,之所以采用51系列单片机,主要考虑到的还是技术问题,在查阅了资料和经过和别人的交流了解之后,采用51是最适合的,一,技术难度不高,对于我们从未接触过的初学者来说,学习起来相对容易,并且认识的朋友里不少都是使用过51的,遇到问题能更好的交流,找到解决的方法;二,成本低廉。
一个AT89S52芯片才8元,搭建一个最小系统也不超过30元。
而如果采用AVR的话,不但成本更高(50元),并且难度更大,学习起来不易,更由于朋友圈子里用的人更少,遇到问题不好交流和解决。
应用的技术分析:一单片机最小系统的搭建:由于电机需要PWM功能实现直流电机的调速控制,我们采用软件模拟的方法实现PWM输出。
目前我国应用最多的一种单片机系列是美国Intel公司的8位高档单片机MCS —51系列,这个系列里机型多种,性能特点不错,加上我们将来要学习的单片机课程是该类型的单片机,应用相对顺手。
并且可以实现采用软件模拟的方法实现PWM输出。
AT89S52是ATMEL公司推出的一种低功耗、高性能CMOS 8位微控制器,具有8K 在系统可编程Flash 存储器。
使用Atmel 公司高密度非易失性存储器技术制造,与工业80C51 产品指令和引脚完全兼容。
片上Flash允许程序存储器在系统可编程,亦适于常规编程器。
在单芯片上,拥有灵巧的8 位CPU 和在系统可编程Flash,使得at89s52单片机为众多嵌入式控制应用系统提供高灵活、超有效的解决方案。
at89s52具有以下标准功能: 8k字节Flash,256字节RAM,32 位I/O 口线,看门狗定时器,2 个数据指针,三个16 位定时器/计数器,一个6向量2级中断结构,全双工串行口,片内晶振及时钟电路。
倒车雷达电路设计

倒车雷达电路设计电路设计2011-03-30 09:50:18 阅读4 评论0 字号:大中小订阅倒车雷达只需要在汽车倒车时工作,为驾驶员提供汽车后方的信息。
由于倒车时汽车的行驶速度较慢,和声速相比可以认为汽车是静止的,因此在系统中可以忽略多普勒效应的影响。
在许多测距方法中,脉冲测距法只需要测量超声波在测量点与目标间的往返时间,实现简单,因此本系统采用了这种方法。
如图1所示,驾驶员将手柄转到倒车档后,倒车雷达自动启动,倒车雷达探头向后发射40kHz的超声波信号,经障碍物反射,由倒车雷达探头收集,进行放大和比较,单片机将此信号送入显示模块,同时触发语音电路,发出同步语音提示,当与障碍物距离小于1m、0.5m、0.25m时,发出不同的报警声,提醒驾驶员停车。
图1 倒车雷达工作原理图图2 倒车雷达探头电路一,相关的硬件设计1 倒车雷达探头设计倒车雷达探头包括超声波产生电路和超声波发射控制电路两个部分,超声波探头(又称“超声波传感器”)选用KT40-1602,可采用软件发生法和硬件发生法产生超声波。
前者利用软件产生40kHz的超声波信号,通过输出引脚输入至驱动器,经驱动器驱动后推动探头产生超声波。
这种方法的特点是充分利用软件,灵活性好,但需要设计一个驱动电流在100mA以上的驱动电路。
第二种方法是利用超声波专用发生电路或通用发生电路产生超声波信号,并直接驱动倒车雷达探头产生超声波。
这种方法的优点是无须驱动电路,但缺乏灵活性。
本设计采用第一种方法产生超声波,电路设计如图2所示。
40kHz的超声波是利用555时基电路振荡产生的。
其振荡频率计算式为f=1.43/((R 9+2·R 10)·C 5)。
将R 10设计为可调电阻的目的是为了调节信号频率,使之与超声波探头的40kHz固有频率一致。
为保证555时基具有足够的驱动能力,宜采用+12V电源。
CNT为超声波发射控制信号,由单片机进行控制。
图3 倒车雷达探头电路倒车雷达探头包括超声波接收探头、信号放大电路及波形变换电路三部分。
红外倒车雷达课程设计
课程设计报告实训课题: 红外倒车雷达的设计姓名: 孟晓冬马超李名申专业: 电子信息工程班级: 电子信息工程2班****: ***一、设计目标 (3)二、项目介绍 (3)三、电路原理简要分析 (4)四、项目实施(系统电路总图及原理) (4)五、元器件清单 (10)六、电路安装要求 (10)七、电路调试 (11)八、实验现象 (12)九、总结 (14)红外倒车雷达的设计一、设计目标1.了解红外线倒车雷达的工作原理。
2.学会识读红外线倒车雷达电路原理图、安装图。
3.掌握红外线倒车雷达电路安装及焊接。
4.掌握红外线倒车雷达测量和调试技能。
5.学会用Multisim软件仿真电路。
二、项目介绍本红外线倒车雷达测距具有电路结构简单、成本低、电路工作稳定的特点,广泛应用于各种测距场合。
红外线倒车雷达电路由多谐振荡器电路、红外线发射与接收电路、信号放大与电压比较电路和发光管显示电路组成。
电路使用红外发射管和红外接收管作为传感器件,电路的核心元件包括NE555和运放LM324。
NE555构成多谐振振荡电路发射红外波信号,LM324主要用来放大红外接收信号和构成电压比较器电路,发光二极管用来指示倒车距离范围。
三、电路原理简要分析NE555及外围元件组成多谐振荡器电路,产生驱动红外线发射管工作的震荡电压,驱动发射管发射出红外线信号。
红外线被物体反射回来后,由红外线接收管接收并送人LK324的第2脚进行放大,放大后的信号经U2的第一脚输出,经C3耦合、D1和C2整流滤波后送至U2的三个比较器的反相输入端,分别与三个比较器的同相输入端的电压进行比较,当反相输入端的电压高于同相输入端的电压时,该比较器输出低电平,使与其连接的发光二极管点亮。
由发光二极管点亮的个数来指示距离的远近。
四、项目实施(系统电路总图及原理)1.系统电路总图2.电路核心元件介绍●红外发射和接收管红外发射管也称红外线发射二极管,属于二极管类。
它是可以将电能直接转换成近红外光(不可见光)并範福射出去的发光器件,主要应用于各种光电开关及遥控发射电路中。
倒车雷达电路实验报告
倒车雷达电路实验报告实验目的本实验旨在设计并制作一个倒车雷达电路,通过使用超声波传感器及其他电子元器件,实现车辆在倒车时的障碍物探测及距离提示功能。
实验器材- Arduino控制板- 超声波模块- 电位器- 面包板- 杜邦线- 蜂鸣器- LED灯- 电源实验原理倒车雷达是一种基于超声波测距原理的车辆倒车辅助装置。
超声波反射传感器通过发送超声波,测量从车辆到障碍物的距离,并将结果转化为电信号输出。
本实验中,通过Arduino控制板与超声波模块、蜂鸣器和LED灯相连接,完成倒车雷达电路的设计。
实验步骤步骤一:准备工作将Arduino控制板、超声波模块、蜂鸣器、LED灯等器材准备齐全。
步骤二:连接电路1. 将Arduino控制板与超声波模块相连,按照超声波模块的引脚标注将信号线(Trig)连接到Arduino控制板的数字引脚2,接收线(Echo)连接到Arduino 控制板的数字引脚3。
2. 将蜂鸣器连接到Arduino控制板的数字引脚4。
3. 将LED灯连接到Arduino控制板的数字引脚5。
步骤三:编写程序1. 打开Arduino开发环境,新建一个工程。
2. 编写程序,设置引脚模式,并编写距离提示的逻辑代码。
3. 将程序上传到Arduino控制板。
步骤四:测试实验1. 将供电器连接到Arduino控制板。
2. 将车辆倒车至感兴趣的位置,并观察蜂鸣器和LED灯的状态变化。
3. 根据实验结果,调整电位器的参数,使提示声音和灯光符合预期的要求。
实验结果经过实验,我们得到了一个基本可行的倒车雷达电路。
当车辆靠近障碍物时,超声波模块会测量到距离,并将结果传递给Arduino控制板。
根据设定的距离阈值,Arduino控制板会控制蜂鸣器发出不同频率的提示声音,并通过LED灯亮灭的方式,给出距离障碍物的远近提示。
实验总结本次实验成功完成了倒车雷达电路的设计和制作。
通过超声波测距原理,实现了对车辆倒车过程中障碍物的探测和距离提示。
倒车雷达设计
倒车雷达的设计09电气罗卿柯文华孙斌具有语音播报的倒车雷达本系统以AT89S51控制器为核心、40KHz方波信号升压电路、超声波发射换能器、超声波接收换能器、信号放大与整形电路、液晶显示模块、键盘控制电路、语音播报电路、测温电路。
由本系统构建的超声波测距仪具有测量准确,显示便捷,操作灵活,反应迅速,使用方便,系统工作稳定,耗电量低等许多特点。
一、倒车雷达的主要功能概述●实时显示测量距离;●实时显示当前环境温度;●距离1.5m开始语音播报测量距离,尔后每变化0.2m均报告之●当距离小于1.5m蜂鸣器报警●当距离小于0.5m输出紧急停止的灯光警示●具有开机音乐及语音提示●倒车语音注意提示,0.3m时则紧急告示●具有语音播报使能控制;●使用4节AA干电池供电;二、倒车雷达的主要技术指标测量距离:0.25m-3.5m测温范围:-55℃-125℃测量距离精确度:+-15cm实时播报声音功率:0.5W工作电流:100mA(min)、110mA(max)输入电源电压:DC6V二方案论证(一)超声波发射方案方案一基本模拟电路搭建用基本门电路、模拟电路来产生40kHz的方波,电路结构复杂,稳定性差,故障系数大,不易调试。
图1 并联非门的推挽发射电路方案二单片机产生方波并采用非门推挽电路驱动用单片机控制产生40kHz方波,产生的波形平稳。
且由于使用软硬件结合的方式,所以电路结构简单、调试也相对方便。
与第一种方案比较优点是非常明显的。
我们选择了第二种方案。
采用并联非门的推挽电路(如图2)可以防止发射波形的畸变,虽然由于电源电压是5V,发射到超声波换能器的电压不会大于5V,在这种发射电压下不能测量到很远的距离。
但对于倒车雷达来说,足以达到要求.如图1所示.(二)接收电路的方案比较、设计与论证方案一、将接收到的信号采用两级放大电路后,经锁相环LM567选频后送到单片机的外部中断入口(如图4),由于系统要使用单电源供电,所以要使用单电源的高带宽的运算放大器。
(完整版)倒车雷达设计电子工程系毕业设计

摘要采用超声波测距原理,驾驶者在倒车时,将汽车的挡位推到R挡,启动倒车雷达,在控制器的控制下,由装置于车尾保险扛上的探头发送超声波,遇到障碍物,产生回波信号,传感器接收到回波信号后经控制器进行数据处理,从而计算出车体与障碍物之间的距离,判断出障碍物的位置,再由LED显示器和蜂鸣器声发出警示信号,从而使驾驶者倒车时不至于撞上障碍物。
整个过程,驾驶者无须回头便可知车后的情况,使停车和倒车更容易,更安全。
本文在查阅、分析国内外倒车雷达系统相关技术的基础上,结合最新研究成果,对基于超声波测距的倒车雷达预警系统的研制进行了深入探讨和研究。
该系统分为测距模块、系统控制模块和显示报警模块,并分别对其进行方案分析,构建了倒车雷达预警系统的系统构架和设计方案;在硬件电路中,详细阐述了运用单片机技术实现的可视倒车雷达预警系统的测距实现原理,分析了以AT89S52单片机为主控单元的系统硬件设计,并通过系统仿真研究,验证了系统的可靠性和可行性。
目录1 绪论 (1)1.1倒车雷达防撞的意义 (1)1.2倒车雷达的发展过程 (2)1.3本文主要内容 (4)2 系统构建与方案设计 (5)2.1系统设计要求 (5)2.2系统构建 (5)2.3系统方案设计 (6)2.3.1测距系统方案设计 (6)2.3.2控制系统方案设计 (6)2.3.3显示报警系统方案设计 (7)2.3.4系统探测范围及传感器布点的确定 (7)2.4本章小结 (8)3 系统硬件设计 (8)3.1系统硬件设计思想 (8)3.2测距系统设计 (9)3.2.1超声波发射模块电路设计 (9)3.2.2超声波接收模块电路设计 (10)3.2.3测温电路设计 (10)3.3控制系统设计 (12)3.3.1 AT89S52单片机最小系统设计 (12)3.3.3换向选通电路设计 (13)2.3.4电源模块电路设计 (13)3.3显示报警模块电路设计 (14)3.3.1显示模块电路设计 (14)3.3.2报警模块电路设计 (15)3.4.1本章小结 (15)4系统软件设计 (15)4.1 主程序设计 (16)4.2 超声波测距子程序及其流程图 (16)4.3 超声波测距流程图 (19)4 总结与展望 (19)5致谢 (20)6参考文献 (20)7附录 (21)1 绪论自2002年以来,家用轿车成为继购房之后的又一大消费热点。
倒车雷达电路
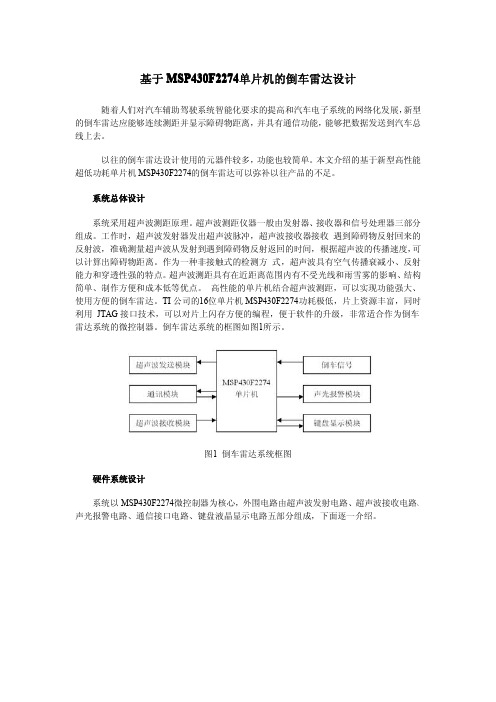
基于MSP430F2274单片机的倒车雷达设计随着人们对汽车辅助驾驶系统智能化要求的提高和汽车电子系统的网络化发展,新型的倒车雷达应能够连续测距并显示障碍物距离,并具有通信功能,能够把数据发送到汽车总线上去。
以往的倒车雷达设计使用的元器件较多,功能也较简单。
本文介绍的基于新型高性能超低功耗单片机MSP430F2274的倒车雷达可以弥补以往产品的不足。
系统总体设计系统采用超声波测距原理。
超声波测距仪器一般由发射器、接收器和信号处理器三部分组成。
工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离。
作为一种非接触式的检测方式,超声波具有空气传播衰减小、反射能力和穿透性强的特点。
超声波测距具有在近距离范围内有不受光线和雨雪雾的影响、结构简单、制作方便和成本低等优点。
高性能的单片机结合超声波测距,可以实现功能强大、使用方便的倒车雷达。
TI公司的16位单片机MSP430F2274功耗极低,片上资源丰富,同时利用JTAG接口技术,可以对片上闪存方便的编程,便于软件的升级,非常适合作为倒车雷达系统的微控制器。
倒车雷达系统的框图如图1所示。
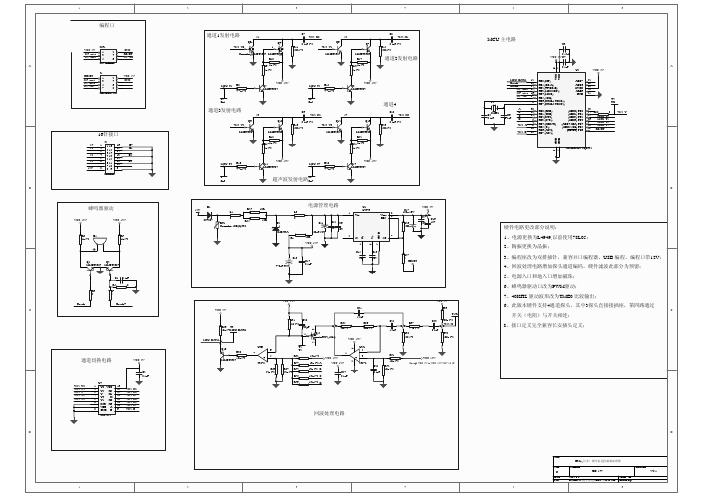
图1倒车雷达系统框图硬件系统设计系统以MSP430F2274微控制器为核心,外围电路由超声波发射电路、超声波接收电路、声光报警电路、通信接口电路、键盘液晶显示电路五部分组成,下面逐一介绍。
图2倒车雷达系统主控电路图系统的主控电路图如图2所示。
本系统中选用的MSP430F2274片内有32Kb闪存和1Kb RAM,因此无须外扩存储器。
外接的32.768kHz晶振作为CPU关闭状态Basic-Timer的时钟源,同时也作为系统的车载时钟使用。
超声波发送模块电路如图3所示,由超声波产生和发射两部分组成。
超声波的产生方法有两种:硬件发生法和软件发生法。
常用的硬件发生法常采用如下方案:超声波由CD4011构成的振荡器振荡产生,经升压变换推动超声波换能器而发射出去,振荡器的起振和停振由单片机来控制。
基于单片机的汽车倒车雷达系统设计(含程序)

基于单片机的汽车倒车雷达系统设计摘要随着社会经济的发展交通运输业日益兴旺,汽车的数量在大副攀升。
交通拥挤状况也日趋严重,撞车事件屡屡发生,造成了不可避免的人身伤亡和经济损失,针对这种情况,设计一种响应快,可靠性高且较为经济的汽车倒车防撞预警系统势在必行。
本设计是利用最常见的超声波测距法来设计的一种基于单片机的汽车倒车雷达系统。
本设计的主要是基于STC89C52单片机利用超声波的特点和优势,将超声波测距系统和STC89C52单片机结合于一体,设计出一种基于STC89C52单片机的汽车倒车雷达系统。
该系统采用软、硬件结合的方法,实现了汽车与障碍物之间距离的显示以及危险距离的声光报警等功能。
本设计论文概述了超声波检测的发展及基本原理,阐述了超声波传感器的原理及特性。
在超声波测距系统功能和STC89C52单片运用的基础上,提出了系统的总体构成,对系统各个设计单元的原理进行了介绍,并且对组成各单元硬件电路的主要器件做了详细说明和选择。
本设计论文还介绍了系统的软件结构,并通过编程来实现系统功能和要求。
关键词:汽车倒车雷达、STC89C52、超声波、测量距离、显示距离、声光报警第一章绪论1.1 课题设计的目的和意义随着汽车的普及,越来越多的家庭拥有了汽车。
交通拥挤状况也随之出现,撞车事件也是经常发生,人们在享受汽车带来的乐趣和方便的同时,更加注重的是汽车的安全性,许多“追尾”事故都与车距有着密切的关系。
为了解决这个安全问题,设计一种汽车测距防撞报警系统势在必行。
由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
利用超声波检测往往比较迅速、方便、计算简单。
所以超声波测距法是一种非常简单常见的方法,应用在汽车停车的前后左右防撞的近距离测量,以及在汽车倒车防撞报警系统中,超声波作为一种特殊的声波,具有声波传输的基本物理特性—折射,反射,干涉,衍射,散射。
超声波检测系统倒车雷达的设计(传感器的设计)
超声波检测系统倒车雷达的设计一、设计背景。
项目来源、需要解决的问题等。
随着社会的不断发展,尤其是近几年来,汽车已逐渐成为人们不可或缺的交通工具。
然而,由于汽车的普及,汽车所萌生的一系列问题正渐渐凸显出来。
倒车,是每位驾驶员都必须掌握的技能,如同前行一样需要小心谨慎,每年都有倒车引起事故的报道,轻则对自己的车和他人的财物造成损伤,重则可能危及人的性命,尤其是对儿童危害较大,他们体型较小,仅从后视镜来获取视野指导倒车仍有可能会对人们造成伤害。
现如今后视镜已越来越不能满足人们安全倒车的需求了。
因此,增加汽车的后视能力,研制汽车后部探测障碍物的倒车雷达便成为近些年来的研究热点。
安全避免障碍物的前提是快速、准确地测量障碍物与汽车之间的距离。
为此,设计了以单片机为核心,利用超声波实现无接触测距的倒车雷达系统。
本系统介绍了一种基于51单片机的超声波测距倒车系统的设计,该系统可以精确测得车尾与障碍物的距离,指导司机安全倒车。
倒车雷达是汽车倒车停车时的安全辅助装置,能够以声音或者直观的显示来告知驾驶员驾驶车辆周围障碍物的情况,帮助驾驶员解决泊车倒车时前后左右探视所引起的困扰。
超声波倒车雷达系统一般由超声波传感器、控制器和报警装置等部分组成。
现如今市场上的倒车雷达大多采用超声波测距原理,驾驶员在倒车时,启动倒车雷达,在控制器的控制下,由超声波探头发送超声波,在遇到障碍物后产生回波信号,传感器接收到回波信号后经处理器进行数据处理,判断出障碍物的位置,通过声音、数据、图像等形式为驾驶员提供信息和警示来告知驾驶员周围情况,从而使驾驶员倒车时做到心中有数,提高了驾驶的安全性。
二、设计指标要求。
(1)测量距离40—400cm(2)倒车距离大于150cm时,报警器不响;倒车距离在80—150cm时,报警器断续的响;倒车距离在40—80cm时,报警器较急促的响;倒车距离小于40cm时,报警器连续响,并且发光二极管发光。
三、设计过程。
四线制倒车雷达探头电气原理图
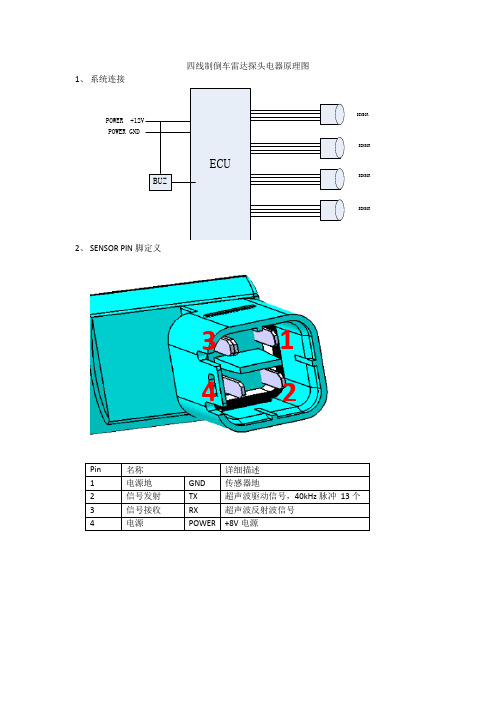
1、系统连接
2、SENSORPIN脚定义
Pin
名称
详细描述
1
电源地
GND
传感器地
2
信号发射
TX
超声波驱动信号,40kHz脉冲13个
3
信号接收
RX
超声波反射波信号
4
电源
POWER
+8V电源3、信号 Nhomakorabea序控制器TX信号脚发射+8v 40kHz的方波脉冲13个用于驱动SENSOR产生超声波。超声波经过障碍物反射后反射波被SENSOR接收。SEMSOR接收反射信号后经过放大滤波及整形变成如上图RX信号的图像。其中余振大约1.2ms,由于障碍物不同和距离的原因是障碍物反射信号强弱不同。反射信号强则反射信号宽度大。最后有控制器(ECU)接收到反射信号,并且计算出障碍物距离。
倒车雷达系统电路图

U4A74ALS04U4B74ALS04U4C74ALS04U4D74ALS04U4E74ALS04LS1TX(F)R81KR91KVCCP10图3-1 超声波发射电路图3-2 集成电路CX20106A内部结构图CX20106A的引脚注释:(1)l 脚:超声波信号输入端,该脚的输入阻抗约为40kΩ。
(2)2脚:该脚与GND之间连接RC串联网络,它们是负反馈串联网络的一个组成部分,改变它们的数值能改变前置放大器的增益和频率特性。
增大电阻R或减小C,将使负反馈量增大,放大倍数下降,反之则放大倍数增大。
但C的改变会影响到频率特性,一般在实际使用中不必改动,推荐选用参数为R=4.7Ω,C=3.3μF。
(3)3脚:该脚与GND之间连接检波电容,电容量大为平均值检波,瞬间相应灵敏度低;若容量小,则为峰值检波,瞬间相应灵敏度高,但检波输出的脉冲宽度变动大,易造成误动作,推荐参数为3.3μF。
(4)4脚:接地端。
(5) 5脚:该脚与电源端VCC 接入一个电阻,用以设置带通滤波器的中心频率f0,阻值越大,中心频率越低。
例如,取R=200k Ω时,fn ≈42kHz ,若取R=220k Ω,则中心频率f0≈38KHz 。
(6) 6脚: 该脚与GND 之间接入一个积分电容,标准值为330pF ,如果该电容取得太大,会使探测距离变短。
(7) 7脚:遥控命令输出端,它是集电极开路的输出方式,因此该引脚必须接上一个上拉电阻到电源端,该电阻推荐阻值为22k Ω,没有接收信号时该端输出为高电平,有信号时则会下降。
(8) 8脚: 电源正极,4.5V ~5V 。
LS34图3-3 超声波检测接收电路图图3-4 AT89C51单片机结构及引脚图图3-6 电源电路。
200601010133图3-7 单片机及显示系统电路图。
倒车雷达原理图
通道4
C10 4052_X3 0.1uF 5% R23 22K 5%
Y1 8MHZ C5 0.1uF A B C D 4052_A 4052_B
12 13 14 15 16 17 7 8 30 31 32 1 2 9 10 11
PB0 (ICP) PB1 (OC1A) PB2 (SS/OC1B) PB3 (MOSI/OC2) PB4 (MISO) PB5 (SCK) PB6 (XTAL1/TOSC1) PB7 (XTAL2/TOSC2) PD0 (RXD) PD1 (TXD) PD2(INT0) PD3 (INT1) PD4 (XCK/T0) PD5 (T1) PD6 (AIN0) PD7 (AIN1) GND GND
超声波发射电路T8 Cn4
B
蜂鸣器驱动
VCC_12V VCC_12V
D1 12V IN4007 L1 0
R24
10R
电源管理电路
L3 0 D2 SMBJ33A C11 100uF/50V R1 SI C12 C26 104 103 1 Vin
U1 L4949 Vout RES 8 6
C17 100u/16V R26 10K
C1 R5 R6 0 BuzzerC R7 0
0.1uF 0
VCC_12V Buzzer+ VCC_5V R31 1M 5% C20 3 480pF 1 MCU_DATA Q16 R30 7 10k 5% U3B + 33078 C2 0.1uF U4 4052_Y0 4052_Y2 4052_Y 4052_Y3 4052_Y1 1 2 3 4 5 6 7 8 Y0 VCC Y2 X2 Y X1 Y3 X Y1 X0 INH X3 VEE A GND B 74HC4052 16 15 14 13 12 11 10 9 4052_X2 4052_X1 4052_X 4052_X0 4052_X3 4052_A 4052_B R33 22k 5% 6 5 R32 R47 R34 R44 22k 5% R45 R46 T2 T2 13k 5% 13k 5% A 13k 5% B 13k 5% C 13k 5% D 1 VCC_12V 4 VCC_12V C24 0.1uF C21 1.5nF R35 2k 5% VCC_12V U3A 2 3 33078 C25 0.1uF R41 10k 5% R42 10k 5% VCC_12V 8 R36 68k 5% C22 1.5nF R37 4.7k 5% R38 100 5%
倒车雷达单元接口电路设计
倒车雷达单元接口电路设计设计中倒车雷达以PIC18F258 单片机为控制核心,控制超声波发射接收电路、温度修正电路工作。
PIC18F258 单片机本身带有CAN 总线,这样可以减小电路的复杂性。
超声波发射电路发出40 kHz 的超声波,经障碍物反射后探头接收到反射波,单片机根据发射和接收时间差计算出障碍物与车的距离,并通过CAN 总线以报文形式发送到仪表单元并显示,也可送到音响单元进行语音报警,当距离小于一定值时,相应的制动单元自动刹车。
温度补偿电路采用数字温度传感器DS18B20,利用声速和温度之间的关系对声速进行校正,从而消除温度变化对声音的影响。
倒车雷达单元接口电路设计CAN 单元的硬件构成一般有两种形式。
一种形式是内部集成CAN 控制器的微控制器加上收发器;另外一种形式是通用微控制器加上独立CAN 控制器再加上收发器。
本设计采用前一种形式,不占用微控制器的端口资源,可以简化接口电路的设计。
考虑到汽车是在非常特殊的环境下工作,所以选择了满足汽车温度变化范围且性价比较高的Mierochip 公司的PIC18F258 单片机,该芯片内部集成了CAN 控制器,可以简化系统的硬件设计、提高系统的可靠性。
倒车雷达单元与CAN 总线接口硬件电路如图3 所示,主要由PIC18F258 单片机,6N137 高速光电耦合器,PCA82 C250 总线收发器三部分组成。
为了提高系统的抗干扰能力和传输信号的能力,采用6N137 高速光电耦合电路可以很好地实现总线上单元之间的电气隔离。
高速光电耦合器的两个电源Vcc 和Vcc 必须采用电源隔离电路进行完全隔离。
tips:感谢大家的阅读,本文由我司收集整编。
仅供参阅!。
电子信息工程技术倒车雷达系统设计
电子信息工程技术倒车雷达系统设计摘要随着社会经济的发展和交通运输业的不断兴旺,汽车的数量在不断的增加。
交通拥挤状况也日益严重,撞车事件也经常发生,造成了很多不可避免的人声伤亡和经济损失,面对这种情况,装置一种安全的防撞预警系统以及防撞设备显得非常的重要。
利用超声波测距法来检测安全距离的方法非常实用,此文详细的阐述了根据超声波测距原理发明的倒车防撞系统。
关键词:汽车倒车雷达;超声波;测量距离1 设计概况该系统由单片机设计AT89S51操纵,在其中,极为重要的构件分别是:单片机编程、发送电源电路、接受电源电路及显示屏,参照下面的图1-1表明,硬件电路不可或缺的一部分有三个:单片机编程、表明电源电路、超音波的接受、发送电源电路。
单片机系统用的都是AT89S51,晶振电路用的都是12MHz高精密,高精度才可以配对比较稳定时间频率,防止精确测量中出现误差,单片机设计输出接口用的都是P2.7型号规格,超声波振子的配置是方波信号40kHz,P3.5型号端口号检测超音波功能的就是用来接受导出往后的回到数据信号,显示屏采用的是最常见的好用的LED数码液晶屏管,单片机设计的P2端口号做为段码输出接口,单片机设计的P3.2、P3.3、P3.4、端口号做为位码输出接口,用PNP管和S9012管做为数码显示管位驱运。
图1-1系统设计框图2硬件设计硬件电路设计主要包含单片机系统及表明电源电路、超音波发送电源电路和超声接受电源电路、报警输出电源电路、供电系统电源电路等几一部分。
单片机设计选用AT89S51,系统软件晶振电路选用12MHz高精密的晶振电路,以获得较平稳工作频率,减少数据误差。
单片机设计用P2.7端口号导出超声波振子所需要的40kHz的方波信号,P3.5端口号检测超音波接受电源电路输出回到数据信号。
表明电源电路选用简单方便的3位共阳LED数码管,段码输出接口为stm32的P2口,位码的输出接口,便是单片机设计的P3.2至3.4端口号,而数码科技位推动采用的是PNP和S9012推动。
倒车雷达系统设计

3.
3.1 硬件选型和介绍
3.1.1 单片机:STC89C52
本设计选用STC89C52单片机,该单片机功耗低、性能高、可编程的存储器有8K。其8位CPU和在线可编程闪存使其为许多更为高效的解决方案。STC89C52微控制器的标准功能如下:
8K字节Flash;
256字节RAM;
下面介绍其引脚的功能
①电路的电源管脚
VCC引脚主要用来提供电源;
GND是为了防止短路的接地引脚。
②复用管脚
RST:在工作过程中起到对输入进行重置的作用,其原理利用的是两个机器周期内的高电平完成的。
This article selects STC89 C52 single-chip microcomputer, and combines ultrasonic ranging, display unit and alarm unit. Using the wireless transmission technology, a simple and convenient reversing radar system is designed on the basis of single chip microcomputer. The system consists of two main components: the slave is responsible for ultrasonic ranging and data processing, and then sends the wireless transmission module to the host. Then, after receiving the signal, the host compares the information with the set threshold information. If the distance is less than the set limit, the car may hit an obstacle when reversing, and an alarm will be sounded. The processing result is displayed in the display module to remind the driver to take reasonable braking measures to brake in time to prevent a safety accident. In this paper, the parking sensor system button module is designed with three buttons, and the alarm distance limit can be manually completed by pressing the button. The setting of the value. In this paper, the design scheme of the parking sensor system is studied and expounded, and the design results are simulated and debugged. The simulation results show that the reversing radar designed in this paper can realize the expected function and provide a theoretical reference for the design of similar equipment.
红外反射式倒车雷达的设计与制作讲解
摘要本文主要介绍一种以一组基于红外发射与接收模块的倒车雷达电路。
该电路由两部分构成,其中一部分是发射红外调制光的发射电路,主要是发射出红外调制光,另外一部分是红外接收、译码及发声电路。
该电路工作时,发射装置发射的红外光反射回来被接收装置接受,接受后通过译码及发声电路,发出警报。
发射电路组成了一个多谐振荡器,可以自由选定一个振荡频率。
接收、译码电路这是这个设计的核心,内含红外专用集成电路CX20106,其内包含前放、载波选频、脉冲译码等电路,只有调整好其内的带通滤波器的中心频率 0与发射电路的发射频率一致,才能正常工作,此时,若红外接收管收到反射回的红外光,则IC2(CX20106)的输出呈低电位,使IC3触发呈置位状态(平时处低电位),为后级提供工作电压。
IC4为语音集成电路,其内存语句为“嘟嘟,请注意”,为高电平触发,得电后把音频信号送给IC5(集成功率放大器LM386),经其放大后驱动喇叭发出报警语音。
关键词:红外光,倒车,报警AbstractThis paper mainly introduced one kind device which built by infrared launches and the accepting blocks.The device including two blocks, one block is used to launch modulated infrared light , the other one is the infrared receive ,decoding and the sound producting.when this device is working, the launching device launch infrared light and the infrated is accepted by the receiving device, after decoding , the sound production electric circuit sends out the warning.The transmission circuit has composed a multivibrator which can be set frequency freely.The receive and decoding circuit is this design's kernal which including special-purpose integrated circuit CX20106 ,amplifer, the carrier chooser and pulse decoder.Only after adjusting the bandpass filter center frequency f0 to be consistent with the transmission circuit transmitting frequency, the device can work .when the infrared receiving tube receives the infrared light which reflects, IC2(CX20106)'s output assumes the low electric potential, causes IC3 to trigger be seted.IC4 is the IC for sounding,It's memory sentence is "du du, attention please", for high level triggering, after the electricity gived to IC5 (integration power amplifier LM386), the loudspeaker was actuated,then the warning would be sented.Keyword:Infrared ray;Reverse the car; Alert目录摘要 (I)Abstract (II)第1章概述 (1)1.1课题背景及研究现状 (1)1.2 红外线报警原理 (2)1.2.1红外线发射电路 (2)1.2.2红外接收、译码及发声电路 (3)本章小结 (4)第2章报警系统的硬件设计 (5)2.1 CX20106的介绍 (5)2.2 555介绍 (8)2.2.1 555简介 (8)2.2.2用555定时器接成的施密特触发器 (9)2.2.3 用555定时器接成的单稳态触发器 (11)2.2.4 用555定时器接成的多谐振荡器 (13)2.3 LM386介绍 (15)2.4 红外光反射测距报警系统的工作原理 (18)2.4.1系统框图和工作原理 (18)2.4.2 40kHz脉冲的产生与红外光的发射 (19)2.5 反射红外光的接收及译码 (19)本章小结 (20)第3章系统的调试和影响因素 (21)3.1系统调试 (21)3.1.1发射电路的调试 (21)3.1.2 接收、译码及发声电路得调试 (21)本章小结 (22)总结 (23)致谢 (24)参考文献 (25)附录1 (26)附录2 (29)附录3 (33)附录4 (34)第1章概述1.1课题背景及研究现状随着经济的发展与汽车科学技术的进步,公路交通呈现出行驶高速化、车流密集化和驾驶员非职业化的趋势。
倒车雷达电路设计与制作电路的心得体会
倒车雷达电路设计与制作电路的心得体会
倒车雷达电路设计与制作是一个涉及到电子技术和信号处理的领域,以下是我对此的一些心得体会:
1. 确定需求和功能:首先需要确定你想要的倒车雷达的功能,比如探测距离、报警方式、显示方式等,然后基于这些需求来设计电路。
2. 学习传感器原理:倒车雷达主要通过距离传感器来检测车辆周围的障碍物。
需要学习并理解传感器的工作原理,比如超声波传感器或者雷达传感器等。
3. 选择合适的控制器:根据你的需求选择一个合适的控制器,比如基于单片机的控制器或者专用的雷达控制器。
确保该控制器能够满足你的需求,并且能够与传感器进行通信。
4. 设计电路:根据传感器和控制器的要求,设计电路板并进行布线。
确保所有的元件能够正确连接,并且注意避免电路中的干扰和噪声。
5. 程序开发:如果你选择了基于单片机的控制器,那么你需要编写相应的程序来实现倒车雷达的功能。
确保程序能够正确地读取传感器数据、实时处理及报警,并且可以与显示设备进行通信。
6. 测试和调试:完成电路设计和程序开发后,进行测试和调试。
确保倒车雷达的各项功能都能够正常运行,并且可以适应不同的环境和情况。
7. 安装和调整:最后,根据你的车辆配置和实际需求,安装倒车雷达,并根据实际情况进行调整,确保它能够准确地报告障碍物的距离。
需要注意的是,倒车雷达是一种辅助驾驶设备,但不代表驾驶员不需要仔细观察周围环境和采取适当的驾驶行动。
始终保持警觉和谨慎是驾驶安全的基本原则。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
倒车雷达电路设计
倒车雷达只需要在汽车倒车时工作,为驾驶员提供汽车后方的信息。
由于倒车时汽车的行驶速度较慢,和声速相比可以认为汽车是静止的,因此在系统中可以忽略多普勒效应的影响。
在许多测距方法中,脉冲测距法只需要测量超声波在测量点与目标间的往返时间,实现简单,因此本系统采用了这种方法。
如图1所示,驾驶员将手柄转到倒车档后,倒车雷达自动启动,倒车雷达探头向后发射40kHz的超声波信号,经障碍物反射,由倒车雷达探头收集,进行放大和比较,单片机将此信号送入显示模块,同时触发语音电路,发出同步语音提示,当与障碍物距离小于1m、0.5m、0.25m时,发出不同的报警声,提醒驾驶员停车。
图1 倒车雷达工作原理图
图2 倒车雷达探头电路
一,相关的硬件设计
1 倒车雷达探头设计
倒车雷达探头包括超声波产生电路和超声波发射控制电路两个部分,超声波探头(又称“超声波传感器”)选用KT40-1602,可采用软件发生法和硬件发生法产生超声波。
前者利用软件产生40kHz的超声波信号,通过输出引脚输入至驱动器,经驱动器驱动后推动探头产生超声波。
这种方法的特点是充分利用软件,灵活性好,但需要设计一个驱动电流在100mA以上的驱动电路。
第二种方法是利用超声波专用发生电路或通用发生电路产生超声波信号,并直接驱动倒车雷达探头产生超声波。
这种方法的优点是无须驱动电路,但缺乏灵活性。
本设计采用第一种方法产生超声波,电路设计如图2所示。
40kHz的超声波是利用555时基电路振荡产生的。
其振荡频率计算式为f=1.43/((R 9+2·R 10)·C 5)。
将R 10设计为可调电阻的目的是为了调节信号频率,使之与超声波探头的40kHz固有频率一致。
为保证555时基具有足够的驱动能力,宜采用+12V电源。
CNT为超声波发射控制信号,由单片机进行控制。
图3 倒车雷达探头电路
倒车雷达探头包括超声波接收探头、信号放大电路及波形变换电路三部分。
超声波探头必须采用与发射探头对应的型号,关键是频率要一致,本设计采用CSB40R,否则将因无法产生共振而影响接收效果,甚至无法接收。
由于经探头变换后的正弦波电信号非常弱,因此必须经放大电路放大。
正弦波信号不能直接被单片机接收,必须进行波形变换。
按照上面所讨论的原理,单片机需要的只是第一个回波的时刻。
接收电路的设计可采用专用接收电路,也可采用通用电路来实现,如图3所示。
超声波在空气中传播时,其能量的衰减与距离成正比,即距离越近信号越强,距离越远信号越弱,通常在1mV~1V之间。
当然,不同接收探头的输出信号强度存在差异。
由于输入信号的范围较大,对放大电路的增益提出了两个要求:一是放大增益要大,以适应小信号时的需要;二是放大增益要能变化,以适应信号变化范围大的需要。
另外,由于输入信号为正弦波,因此必须将放大电路设计成交流放大电路。
为减少负电源的使用,放大电路采用单电源供电,信号放大和变换采用了一片LM324通用运算放大器,前三级为放大器设计,后一级为比较器设计。
LM324既可以双电源工作,也可以单电源工作,因此能满足使用要求。
为满足交流信号的需要,每一级的放大器均采用阻容电路进行电平偏移,即图3中的C7、C21、C22和C24,容量均为10μF,实现单电源条件下交流信号的放大。
对于交流信号而言,电容为短路,因此前三级放大电路的增益均为10。
距离较近时,两级放大的增益已能够输出足够强度的信号了,第三级有可能出现信号饱和,但距离较远时,必须采用三级放大。
合理调节电位器R27,选择比较基准电压,可使测量更加准确和稳定。
图4 语音电路
2 语音电路设计
语音报警是指当倒车雷达探测到的距离小于所设定的安全值时,发出声音提醒驾驶员,语音电路设计如图4所示。
M3720是单声一闪灯报警音效集成电路,芯片内存储一种报警音效,可直接驱动蜂鸣器发声或经外接功放三极管推动扬声器放音,同时还能驱动一只LED闪烁。
该芯片各引脚功能为:5脚VDD;1脚VSS分别为电源输入端与负端,VDD电压3~3.5V;8脚X和1脚Y分别为芯片外接振荡电阻器;6脚TG为触发控制端,低电平触发有效;3脚BZ和2脚BB分别为报警音效输出端,可直接外接压电陶瓷蜂鸣器,如果驱动扬声器则由3脚BZ端引出;4脚L为闪灯输出端,可直接驱动LED发光。
二,相关单片机软件设计
单片机及其开发应用系统具有语言简洁、可移植性好、表达能力强、可进行结构化设计、可以直接控制计算机硬件、生成代码质量高、使用方便等诸多优点。
该系统的主程序处于键控循环工作方式,当手柄转入倒车档,主程序开始调用测量子程序、显示子程序和语音提示子程序,完成整个检测提示过程。
结束语
本文所设计的倒车雷达测距是保障汽车倒车安全的辅助系统,通过倒车雷达探头发出超声波,使用高速单片机计算距离,并加入了温度补偿电路,提高了距离计算的精度。
系统安装的液晶显示器可以直观的显示温度和距离,给驾驶员提供了方便。
倒车时当汽车与障碍物的距离小于我们所设定的安全距离时,便通过语音集成电路发出报警,提醒驾驶员,防止汽车的碰撞或擦伤,具有很强的实用性。