西门子小型伺服驱动-2020
阐述SINAMICS V80伺服驱动系统
阐述SINAMICS V80伺服驱动系统1 SINAMICS V80的介绍SINAMICS V80伺服驱动系统是西门子专为小型简易机械开发的经济型伺服驱动产品。
SINAMICS V80伺服驱动系统价格经济,设定简易便捷,无需参数化的配置方式,可与SIMATIC S7-200系列PLC组成简单的运动控制系统。
SINAMICS V80伺服驱动系统包括伺服驱动器和伺服电机两部分,伺服驱动器总是与其对应的同等功率伺服电机一起配套使用。
SINAMICS V80 伺服驱动器通过脉冲输入接口来接受从上位控制器发来的脉冲序列,进行速度和位置的控制,通过数字量接口信号来完成驱动器运行的控制和实时状态的输出。
图1 V80伺服驱动器接口图通过“指令脉冲设置(PULSE)”旋转开关,可以设定驱动器的指令脉冲分辨率、指令脉冲连接方式和指令脉冲类型。
与SINAMICS V80 驱动器相匹配的伺服电机有4种,功率分别是100W、200W、400W和750W,每种电机都有带抱闸和不带抱闸两款。
电机类型为永磁同步电机,采用自然风冷方式,电机表面无涂漆,电机输出轴带键槽。
2 EM253的技术特点S7-200 EM253定位模块用来对单轴步进电机进行开环速度、位置控制,无法实现闭环控制;提供从12Hz到200kHz的脉冲输出频率;控制系统的测量单位可以采用脉冲数,也可以采用工程单位(如:英尺、厘米);具有绝对方式、相对方式和手动方式三种工作模式;提供连续的位置控制工程,最多可以支持25个位置点的控制,每段运动轨迹包络最多可以有4种运动速度;提供螺距补偿功能;提供4种不同归零模式。
EM253集成有5个数字输入点(STP,停止;RPS,参考点;ZP,零脉冲信号;LMT+,正方向限位信号;LMT-,负方向限位信号),6个数字输出点(DIS、CLR、P0+、P1+、P0-、P1-)。
通过S7-200PLC的扩展接口,实现与CPU间通讯控制。
西门子伺服电机SQM10.16562说明书
`7804SQN70... / SQN71...SQN74... / SQN75...电动执行器SQN7...电动执行器,可用于中小型燃烧器的风门挡板和燃气或燃油阀控制.SQN7…特别适用于将该执行器与其产品结合到一起使用OEM厂家!使用和功能SQN7…执行器专门被设计用来驱动气燃料阀和风门挡板,这些阀门用于中小型的燃油或燃气燃烧器。
从而达到燃料和助燃空气的最佳混合比.-与P-PI或PID控制器连接,例如RWF40…-直接连接不同型号的燃烧控制器,例如LOA..,LMO…,LMG…或LFL…-与1或2线控制器或3位控制器连接•所有执行器的功能:: - 耐压和抗热塑料壳体设计- 螺丝接线端子- 带有离合装置的免维护齿轮机构- 内置定位标示- 便于调整的限位开关和辅助开关- 集成电路回路•保持转矩- SQN70... / SQN71... / SQN75...- SQN74...0.7...1.3 Nm0.7 Nm•运行时间: - SQN70... / SQN71... / SQN75...- SQN74...4...30 s4 s•旋转方向- SQN70... / SQN74...- SQN71... / SQN75...逆时针方向顺时针方向• SQN74.../SQN75... - 固定孔和线缆穿入孔-Page1Siemens Building Technologies警告为避免人员伤害,财产损失和环境破坏,必须遵守以下警告注意事项!不要打开、干扰或是修改电动执行器!• 所有过程 (装配、安装和维修工作等必须由专业人员进行。
• 改变执行器连接区域里任何电线连接前,将装置完全与主电源隔离(拆除所有极线• 给连接末端做好充分的保护措施,确保不受到电击危险。
• 检查并确保电线正确连接• 跌落或震动将破坏安全性能。
将不能再继续使用,即使它们外观没有受到任何损坏。
装配注意事项•确保符合相关国家安全规则调试注意事项•调试装置前,检查并确认电线正确连接。
关于回转窑轮带间隙测控及筒体温度

Ts 为筒体垫板外径处的温度,℃;Tro 为轮带的平均温度,
℃;T1 为安装时的环境温度,℃。
窑工作状态下(即热态下),轮带内圆与筒体垫板
外圆在直径方向上的实际间隙为:
Δ 热 =2δ1-2δ2
(2)
设计时,在理想状态下,应有 Δ 热 =2δ1-2δ2=0,
即 δ1=δ2。考虑安装方便和窑内热工制度,要求热态
Copyright©博看网. All Rights Reserved.
中国设备工程 2023.01 (下)
73
Research and Exploration 研究与探索·工艺流程与应用
V90PN 在立体仓库堆垛机中的应用研究
李立夫 (广州市殡葬服务中心,广东 广州 510630)
摘要:目前,市面上立体仓库堆垛机多采用可编程控制器(PLC)和变频器控制技术来实现对堆垛机在水平、垂直、货叉伸缩 3 个 方向上的定位控制,鉴于此,本文介绍了在立体仓库堆垛机的设计中采用伺服系统应用技术的可行性,着重分析了堆垛机位置控制的方法 及改进措施。本系统采用西门子 SIMATIC S7-1200 PLC 通过组态工艺对象(TO),使用 SINAMICS V90PN 伺服驱动器的速度控制方式来实现 定位控制功能。
堆垛机的运动控制采用的是伺服系统。 那么,什么是伺服系统呢?通常来讲,伺服系统是 具有负反馈的闭环自动控制系统。一个完整的伺服控制 系统包括以下设备:控制器、伺服驱动器、伺服电机以 及反馈装置。在本控制系统中,控制器采用的是西门子 S7-1215C PLC,驱动器采用的是西门子 SINAMICS V90 带有 PROFINET 接口的驱动器,伺服电机采用的是与 V90 PN 配套使用的 1FL6 伺服电机,反馈装置就是电机上所 带的编码器。系统主要元件明细表见表 1。 (1)1 台 S7-1215C PLC 通过 PROFINET 网络,使用 轴工艺对象(TO)控制 5 台 V90PN 的启动和停止,5 台 V90PN 工作在速度模式,使用 3 号标准报文。5 台 V90PN 分别为水平方向(X 方向)2 台,垂直方向(Y 方向)2, 货叉伸缩方向(Z 方向)1 台。
S7-200 SMART 可编程控制器 样本(2017)
产品样本• 09.2017/smartS7-200 SMART 可编程控制器西门子公司一直致力于工业自动化最新技术的研发、推广及应用,在过去的160 多年里,为广大的工业客户带来了可靠高效的自动化产品,完善的自动化解决方案,提高了客户的生产效率,增强了客户的市场竞争力。
西门子SIMATIC 控制器系列是一个完整的产品组合,包括从最基本的智能逻辑控制器LOGO!以及 S7 系列高性能可编程控制器,再到基于 PC 的自动化控制系统。
无论多么严苛的要求,它都能根据具体应用需求及预算,灵活组合、定制,并一一满足。
SIMATIC S7-200 SMART 是西门子公司经过大量市场调研,为中国客户量身定制的一款高性价比小型 PLC 产品。
结合西门子 SINAMICS 驱动产品及 SIMATIC 人机界面产品,以 S7-200 SMART 为核心的小型自动化解决方案将为中国客户创造更多的价值。
2模拟量输入/输出模块技术规范 ................................... 26数字量输入/输出信号板技术规范 ............................... 27模拟量输入信号板技术规范 ....................................... 27模拟量输出信号板技术规范 ....................................... 27RS485/232 信号板技术规范 ....................................... 27电池信号板技术规范 .................................................. 27热电阻模块技术规范 .................................................. 28热电偶模块技术规范 .................................................. 28PROFIBUS-DP 从站通信模块 ........................................ 28电源模块 ................................................................... 28安装尺寸图 ................................................................ 29订货号说明 ................................................................ 29模块和信号板接线示意图 ........................................... 30经济型 CPU 概览 ....................................................... 33经济型 CPU 技术规范 ................................................ 34经济型 CPU 接线示意图 ............................................. 36订货数据 . (39)产品亮点 ................................................................... 04CPU 模块 ................................................................... 06信号板 ....................................................................... 08网络通信 ................................................................... 09运动控制 ................................................................... 10编程软件 ................................................................... 12小型自动化解决方案 .................................................. 14技术规范 ................................................................... 16CPU SR20/ST20 技术规范 ........................................... 16CPU SR30/ST30 技术规范 ........................................... 18CPU SR40/ST40 技术规范 ........................................... 20CPU SR60/ST60 技术规范 ........................................... 22数字量输入模块技术规范 ........................................... 24数字量输出模块技术规范 ........................................... 24数字量输入/输出模块技术规范 ................................... 25模拟量输入模块技术规范 ........................................... 26模拟量输出模块技术规范 . (26)目录3SIMATIC S7-200 SMART 产品亮点机型丰富,更多选择提供不同类型、I/O 点数丰富的CPU 模块,单体I/O 点数最高可达60点,可满足大部分小型自动化设备的控制需求。
S7-200 SMART PLC读取1FL6伺服电机的绝对值编码器数值
8/CN/view/zh/99521584目录1概况 (3)2使用的硬件及软件 (3)2.1硬件2.2软件3实现方法 (3)3.1概述3.2实现步骤3.3接线3.4 PLC组态及编程4参考资料 (9)1 概况SINAMICS V90是西门子推出的一款小型、高效便捷的伺服系统。
它作为 SINAMICS 驱动系列家族的新成员,与SIMOTICS S-1FL6 伺服电机完美结合,组成最佳的伺服驱动系统,实现位置控制、速度控制和扭矩控制。
目前1FL6电机有两种编码器类型,即增量编码器类型及绝对值编码器类型。
西门子的小型自动化S7-200 SMART PLC可以控制V90驱动器,本文介绍如何实现SMART PLC读取1FL6伺服电机的绝对值编码器数值。
关于如何实现SMART PLC控制V90实现定位控制请参见《SIMATIC S7-200 SMART 系统手册》及《S7-200 SMART连接SINAMICS V90 实现位置控制》。
2使用的硬件及软件2.1硬件序号设备名称 订货号1 PS207电源24 V DC/2.5 A6EP1 332-1LA00CPUST60 6ES7288-1ST60-0AA0 S7-200SMART2 SIMATIC3 V90驱动器6SL3210-5FE10-4UA04 伺服电机1FL6042-1AF61-0LG15 V90 动力电缆(含接头)6FX3002-5CL01-1AD06 伺服电机编码器电缆6FX3002-2DB10-1AD0 (含接头,用于绝对值编码器)电缆线)6SL3260-4NA00-1VB0针接头及1m7 V90控制信号电缆(含508 SIMATIC Field PG M36ES7715-1BB23-0AA1USB电缆9 Mini2.2软件序号说明1 Window 7 旗舰版32位2 STEP 7-Micro/WIN SMART 编程软件3 SINAMICS_V-ASSISTANT3实现方法3.1概述如图1所示,使用PG通过标准mini USB电缆与V90连接,打开SINAMICS V—ASSITANT 软件设置驱动器的参数。
SINAMICS V90 伺服驱动系统与 SIMOTICS S-1FL6 伺服电机说明书

伺服电机合作代理商021-********/180********2目录伺服驱动系统SINAMICS V90 伺服驱动和 SIMOTICS S-1FL6 伺服电机组成了性能优化,易于使用的伺服驱动系统,八种驱动类型,七种不同的电机轴高规格,功率范围从0.05kW 到7.0kW 以及单相和三相的供电系统使其可以广泛用于各行各业,如:定位,传送,收卷等设备中,同时该伺服系统可以与S7-1500T/S7-1500/S7-1200 进行完美配合实现丰富的运动控制功能。
伺服驱动系统概述 ..................................................03伺服驱动系统优点 ..................................................05SINAMICS V90 伺服驱动系统 的自动化环境 ......................................................... 10SINAMICS V-ASSISTANT 调试工具 ..........................10SINAMICS V90 技术数据与控制特征 .......................12系统一览及接线图 ..................................................15SIMOTICS S-1FL6 技术数据 及扭矩/速度曲线 .................................................... 18SINAMICS V90 和 SIMOTICS S-1FL6 安装尺寸及安装间距 ............................................... 22选型步骤 ...............................................................26SINAMICS V90 和 SIMOTICS S-1FL6 订货数据 (27)3脉冲序列版本 (PTI)PROFINET 版本 (PN)SINAMICS V90 伺服驱动SINAMICS V90 根据不同的应用分为两个版本:1. 脉冲序列版本(集成了脉冲,模拟量,USS/MODBUS )2. PROFINET 通讯版本SINAMICS V90 脉冲版本可以实现内部定位块功能,同时具有脉冲位置控制,速度控制,力矩控制模式。
西门子V90伺服通过附加报文实现力矩限幅

二,支持附加报文的版本要求
V90 PN通过 PROFINET 总线与 PLC进行连接,V90 PN驱动器需要使用新固件FW V1.3,
它支持附加报文750,可在标准报文上增加750附加报文来实现轴的转矩限幅及附加转矩给
定功能。
Hale Waihona Puke 如何升级V90固件,请参阅相关课件。
四,实例组态 1,组态PLC
新建项目
添加新硬件 选择相应的PLC (型号,版本)
确定
四,实例组态 2,组态V90
网络视图
SINAMICS
硬件目录 其它现场设备 PROFINET IO
SINAMICS V90 PN V1.0
分配PLC
Drivers SIEMENS AG
四,实例组态 3,组态通讯报文 设备视图 硬件目录 子模块 选择标准报文3 选择附加报文750
但因 PLC版本的问题,在工艺对象里面仅支持标准报文1-4
三,实例组态 4,组态工艺对象
编码器
选择标准报文
其他工艺对象选项不详细介绍
四,实例组态 5,程序编辑
设定力矩值换算: 16384=4000 hex = p2003 =9.64N.M
四,实例组态 5,程序编辑
根据报文组态里面的地址和附加报文结构,把力矩值直接赋值给驱动器。
在TIA Portal中安装高版本的GSD文件 : GSDML-V2.32-Siemens-Sinamics_V90-20180321.xml
三,附加报文结构 在通过参数 p8864 设置辅助报文之前,必须首先通过 p0922 选择一个主报文。若更 改了主报文,辅助报文会被自动禁用,因此,在更改 p0922 之后,必须重新设置 p8864。
S7-200 SMART PLC读取1FL6伺服电机的绝对值编码器数值
8/CN/view/zh/99521584目录1概况 (3)2使用的硬件及软件 (3)2.1硬件2.2软件3实现方法 (3)3.1概述3.2实现步骤3.3接线3.4 PLC组态及编程4参考资料 (9)1 概况SINAMICS V90是西门子推出的一款小型、高效便捷的伺服系统。
它作为 SINAMICS 驱动系列家族的新成员,与SIMOTICS S-1FL6 伺服电机完美结合,组成最佳的伺服驱动系统,实现位置控制、速度控制和扭矩控制。
目前1FL6电机有两种编码器类型,即增量编码器类型及绝对值编码器类型。
西门子的小型自动化S7-200 SMART PLC可以控制V90驱动器,本文介绍如何实现SMART PLC读取1FL6伺服电机的绝对值编码器数值。
关于如何实现SMART PLC控制V90实现定位控制请参见《SIMATIC S7-200 SMART 系统手册》及《S7-200 SMART连接SINAMICS V90 实现位置控制》。
2使用的硬件及软件2.1硬件序号设备名称 订货号1 PS207电源24 V DC/2.5 A6EP1 332-1LA00CPUST60 6ES7288-1ST60-0AA0 S7-200SMART2 SIMATIC3 V90驱动器6SL3210-5FE10-4UA04 伺服电机1FL6042-1AF61-0LG15 V90 动力电缆(含接头)6FX3002-5CL01-1AD06 伺服电机编码器电缆6FX3002-2DB10-1AD0 (含接头,用于绝对值编码器)电缆线)6SL3260-4NA00-1VB0针接头及1m7 V90控制信号电缆(含508 SIMATIC Field PG M36ES7715-1BB23-0AA1USB电缆9 Mini2.2软件序号说明1 Window 7 旗舰版32位2 STEP 7-Micro/WIN SMART 编程软件3 SINAMICS_V-ASSISTANT3实现方法3.1概述如图1所示,使用PG通过标准mini USB电缆与V90连接,打开SINAMICS V—ASSITANT 软件设置驱动器的参数。
基于S120伺服驱动模块111报文的西门子S7-300程序模块设计
基于S120伺服驱动模块111报文的西门子S7-300程序模块设计高挺;朱晓民;张希;程金【摘要】针对自动化系统中集成S120伺服驱动模块时遇到的控制及通讯难题,设计了基于111报文的S7-300通讯控制程序模块Servo120。
使得从事自动化工作的工程师可以通过该模块简单、快捷的实现S7控制系统与S120伺服驱动模块的通讯,并通过报文方式实现S7-300PLC对S120伺服驱动模块的速度与位置控制。
模块对报文中的控制及状态字进行详细解析,大大提高了调试诊断效率。
并设置了多点联动,速度转换等模式,极大的方便了现场应用,提高了系统集成过程的效率并降低了操作难度。
【期刊名称】《制造业自动化》【年(卷),期】2016(038)010【总页数】3页(P67-69)【关键词】S120伺服驱动模块;111报文;程序模块【作者】高挺;朱晓民;张希;程金【作者单位】北京机械工业自动化研究所,北京100120;北京机械工业自动化研究所,北京100120;北京机械工业自动化研究所,北京100120;北京机械工业自动化研究所,北京100120【正文语种】中文【中图分类】TP23当今,企业对生产设备的要求是设备生产成本越来越低,但同时能够提供越来越高的生产效率。
SINAMICSS120伺服驱动模块因恰恰能满足这些方面的要求而被广泛应用于自动化系统中。
对于自动化系统集成商而言,伺服系统的好处虽然很多,但其与中央控制器的融合过程往往因工程师经验不足等原因而变得比较困难。
本文以S7-300与S120通讯的111报文为基础,对其进行深入解读,设计出一款专用通讯控制程序模块。
为S120伺服驱动模块在以S7-300为核心的自动化系统中的应用带来了极大的便利。
通讯控制程序模块的设计是基于S7-300的PLC与S120通讯111报文的,因此模块环境平台的搭建如下:在S7硬件中配置S120硬件(如图1硬件配置),在整个项目中集成S7-300CPU作为整个系统的核心控制器、S120伺服驱动模块、MP277人机交互触摸屏系统(如图2项目配置),以图3网络连接所示的方式通过PROFIBUS网络组成统一的系统。
西门子交流伺服驱动器性能的调试与优化
而这些 特性取决 于进 给伺 服 系统 的 主要参 数 , 电流 如
环增益 MD 10 电流 环 积 分 时 间 MD 1 1 速度 环 增 12 、 12 、 益 MD 4 7 MD 4 8 10/ 10 、速 度 环 积 分 时 间 MD 4 9 10 /
MD 4 0等 。上述 参 数 在 数 控 系 统 出 厂 时就 已设 定 , 11 但与数控 机床实 际工作 情 况并 不 完全 吻合 , 加工 时 如 实际机械 部件 的拖 动 情况 , 因此需 进行 参数 的调整 和
一
2 一 0
数控 ・ 数显——西 门子交 流伺服 驱动器性能的调试与优化
机床 电器 2 1 . 0 15
择 “ c 控制方 式 , P” 并通 过 “ K” O 确认 。在 弹出 的对 话
框 中选 择 “ 制 器 子 目录 ( ot l r ” 之 后 再 选 择 控 C nr l ) , oe “ o eO ee , 出“ N n fh s” 弹 t 速度控 制画面 ” 如 图 9所示 ; ,
于调 试 Sm di 1 U的一个软 件工 具 , 有直 观 、 i or e6 1 v 具 快 捷、 易掌握 的特点 。Sm C m— i o o U伺服 调试 软 件主 画面 如 图 1 示 , 能够设 定 驱 动器 与 电机 和功率 模块 匹 所 它 配 的基本参数 , 根据伺服 电机 实际拖动 的机械部 件 , 对
西门子 SINAMICS V80司小型伺服驱动器 说明书

操作手册SINAMICS V80 04.2008SINAMICS V80操作手册04.2008系统准备C-11安装C-16系统接线C-18试运行C-41故障显示及处理C-43系统维护及服务C-54规格及说明C-60前言由衷感谢您购买SIEMENS公司小型伺服驱动器—SINAMICS V80。
为了您能够安全使用本伺服驱动器,请您一定阅读该使用说明书。
同时,请妥善保存该说明书,并保证把它交给最终用户。
相关资料如需要,也可以参阅下面的相关资料:• SINAMICS V80产品样本• SINAMICS V80伺服电机说明书有关安全标识本手册中有关安全的内容,使用如下标识。
有关作业安全标识的叙述,其内容十分重要,请务必遵守。
表示如果操作错误,将会导致危险情况的发生,造成死亡或重伤。
表示如果操作错误,将会导致危险情况的发生,可能会造成中等程度的受伤或轻伤,或物品损失。
表示禁止(绝对不能做的事表示强制(必须要做的事)。
例如接地时,则表示为 。
安全注意事项本节就产品到货时的确认、保管、搬运、安装、配线、运行、检查、废弃等用户必须遵守的重要事项进行说明。
确认到货产品时的注意事项保管、搬运注意事项安装注意事项配线注意事项维护与检查注意事项废弃注意事项请在使用时予以注意。
• 为了进行详细说明,本手册中的部分插图在描绘时去掉了外罩或安全保护体。
在实际运行时,请务必按规定将外罩或安全保护体安装到原来的位置,再根据本手册的说明进行运行。
• 本手册中的插图为代表性图例,可能会与您收到的产品有所不同。
• 由于产品升级、规格变更以及为提高本手册的使用便利性,我们将会适时对本手册进行更新。
请到SIEMENS网站下载或向代理商索取最新的资料。
• 对于客户自行改造的产品,本公司不对质量提供任何保证。
对于因改造产品所造成的伤害及损失,本公司概不负责。
目录前言 ……………………………………………………………………………………………………………………… C-1相关资料……………………………………………………………………………………………………………… C-1有关安全标识………………………………………………………………………………………………………… C-1安全注意事项………………………………………………………………………………………………………… C-21 系统准备 ………………………………………………………………………………… C-111.1 警示标记……………………………………………………………………………………………… C-111.2 到货检查 ……………………………………………………………………………………………… C-111.3 订货号的含义 ………………………………………………………………………………………… C-121.4 SINAMICS V80驱动器及伺服电机的订货号 …………………………………………………… C-121.5 接口模块和功能……………………………………………………………………………………… C-13指令脉冲设置 (PULSE) …………………………………………………………………………… C-13 指令滤波设置 (FIL) ……………………………………………………………………………… C-14 指令脉冲指示(REF) ……………………………………………………………………………… C-14 报警指示 (AL1 / AL2 / AL3) ……………………………………………………………………… C-152 安装 ……………………………………………………………………………………… C-162.1 安装环境 ……………………………………………………………………………………………… C-162.2 安装方法 ……………………………………………………………………………………………… C-17安装方法及方向 …………………………………………………………………………………… C-17 安装间距…………………………………………………………………………………………… C-173 系统接线 ………………………………………………………………………………… C-183.1 接线时的注意事项 …………………………………………………………………………………… C-18 电源线的保护 ……………………………………………………………………………………… C-18 有关接地的注意事项…………………………………………………………………………… C-18 有关电缆的注意事项 …………………………………………………………………………… C-18 其他注意事项 ……………………………………………………………………………………… C-19 功率损耗 …………………………………………………………………………………………… C-19 断路器及保险的容量 …………………………………………………………………………… C-20 电源滤波器 ………………………………………………………………………………………… C-213.2 系统部件一览 ………………………………………………………………………………………… C-213.3 接线图示例 …………………………………………………………………………………………… C-223.4 符合CE标记的安装和接线方法 ………………………………………………………………… C-23EMC认定的安装条件 …………………………………………………………………………… C-23 铁氧体磁芯的安装方法………………………………………………………………………… C-24 电缆的固定 ………………………………………………………………………………………… C-24 屏蔽箱 ……………………………………………………………………………………………… C-243.5 SINAMICS V80及外围设备 ………………………………………………………………………… C-253.6 SINAMICS V80供电主电路的接线 ……………………………………………………………… C-253.7 SINAMICS V80供电主电路的电线尺寸 ………………………………………………………… C-26电线的类型 ………………………………………………………………………………………… C-26 电线尺寸与允许电流…………………………………………………………………………… C-26 电源输入端子(L1、L2)和电机接线端子(U、V、W) …………………………………… C-27 接地端子 …………………………………………………………………………………………… C-27 编码器信号连接器(X2) ………………………………………………………………………… C-27 输入输出信号连接器(X1) ……………………………………………………………………… C-273.8 供电电源连接器(X10)的接线 …………………………………………………………………… C-283.9 电机电缆连接器(X20)的接线 ……………………………………………………………… C-30不带抱闸的电机 …………………………………………………………………………………… C-30 带抱闸的电机……………………………………………………………………………………… C-313.10 编码器连接器(X2)的接线 ………………………………………………………………………… C-33 带连接器标准的编码器电缆 …………………………………………………………………… C-333.11 输入输出连接器(X1)的接线 ……………………………………………………………………… C-34 标准DI/DO信号电缆的连接图 ………………………………………………………………… C-353.12 输入信号的接线举例 ………………………………………………………………………………… C-36控制器集电极开路输出的接线举例 ………………………………………………………… C-36 控制器线路驱动器输出的接线举例………………………………………………………… C-363.13 输出信号的接线举例 ………………………………………………………………………………… C-373.14 紧急停止的时序 ……………………………………………………………………………………… C-383.15 输入输出信号的说明 ………………………………………………………………………………… C-394 试运行 …………………………………………………………………………………… C-415 故障显示及处理 ………………………………………………………………………… C-435.1 报警指示灯…………………………………………………………………………………………… C-435.2 报警指示LED不亮灯时…………………………………………………………………………… C-486 系统维护及服务 ………………………………………………………………………… C-546.1 定期检查……………………………………………………………………………………………… C-546.2 部件的标准寿命……………………………………………………………………………………… C-546.3 冷却风扇的更换方法 ………………………………………………………………………………… C-55当为100 W至400 W伺服驱动器时 ………………………………………………………… C-55 当为750 W伺服驱动器时 ……………………………………………………………………… C-577 规格及说明 ……………………………………………………………………………… C-607.1 技术数据……………………………………………………………………………………………… C-607.2 信号说明……………………………………………………………………………………………… C-617.3 过载保护特性………………………………………………………………………………………… C-621.1警示标记产品的侧面标有警示标记。
德国西门子伺服简明手册V2.0
第6页
为了避免编码器干扰报警,编码器电缆必须屏蔽。 屏蔽线网两端分别焊在图上的位置。
编码器接口 - 电机侧
编码器接口 - 驱动侧
为了避免编码器意外报警,在编码器插头插上时, 务必插头上的两颗螺丝用十字起紧固。
模拟量输 入/输出
50 针 MDR 连接器正面
插头背面管脚
针脚号 信号
说明
针脚号 信号
说明
1,2, 通过脉冲输入实现位置设定值。不包括 5 V 高 36,3 通过脉冲输入实现位置设定值。24 V 单端脉冲输
26,2 速差分脉冲输入(RS485),最大频率00 kHz
6
DI2
数字量输入 2
30 DO1
数字量输出 1
7
DI3
数字量输入 3
31 DO2
数字量输出 2
8
DI4
数字量输入 4
32 DO3
数字量输出 3
9
DI5
10
DI6
11
DI7
12
DI8
13
DI9
18
P12AI
19
AI1+
20
AI1-
数字量输入 5
33
数字量输入 6
34
数字量输入 7
35
数字量输入 8
49
绝对编码器负向时钟信号
4
Biss_ClockP
绝对编码器正向时钟信号
5
P5V
编码器电源,+5V
6
P5V
编码器电源,+5V
7
M
SMART 200读取1FL6伺服电机的绝对值编码器数值

SMART 200读取1FL6伺服电机的绝对值编码器数值(一)概况SINAMICS V90是西门子推出的一款小型、高效便捷的伺服系统。
它作为SINAMICS 驱动系列家族的新成员,与SIMOTICS S-1FL6 伺服电机完美结合,组成最佳的伺服驱动系统,实现位置控制、速度控制和扭矩控制。
目前1FL6电机有两种编码器类型,即增量编码器类型及绝对值编码器类型。
西门子的小型自动化S7-200 SMART PLC 可以控制V90 驱动器,本文介绍如何实现SMART PLC 读取1FL6 伺服电机的绝对值编码器数值。
(二)使用的硬件及软件(三)实现方法3.1 概述如图1 所示,使用PG 通过标准mini USB 电缆与V90 连接,打开SINAMICS V-ASSITANT软件设置驱动器的参数。
如图2 所示,PLC 通过V90 上的RS485 通讯读取编码器调整状态并且通过V90 的数字量输出检查V90 的驱动器状态,判断绝对位置是否有效。
如果V90 的DO1=1,DO2=0 和DO3=1 且r2507=3,这意味着PLC 可以有效地读取编码器的绝对位置,此时可以通过RS485 USS 通讯读取绝对位置(r2521[0]),否则r2521 是无效的。
PLC 可以通过数字量输出报警或面板来提示用户当前r2521 无效。
读取r2521 值后,PLC 可以通过PTI 方式输出脉冲给驱动器执行相应的运动控制。
3.2 实现步骤根据SIMATIC S7-200 SMART CPU ST60 的运动控制功能信号分配和V90 端子定义进行接线(详见《SINAMICS V90 OPI 操作手册》);使用SINAMICS_V-ASSISTANT 对SINAMICS V90进行参数设置以及对电机的绝对值编码器进行调试;使用STEP 7-Micro/WIN SMART 编程软件对CPU ST60 进行组态和参数化,操作步骤如表1 所示。
2024年度西门子S120伺服运动控制12课

实施与调试
按照设计方案,搭建实验平台,进行硬件安装、软件调试 和系统联调,确保物料搬运机器人满足设计要求。
2024/3/24
效果评估
对物料搬运机器人的性能进行评估,包括搬运效率、定位 精度、运动控制等指标,验证系统设计的有效性。
35
09 系统维护与保养 建议
2024/3/24
36
定期检查项目清单
19
05 运动控制功能实 现
2024/3/24
20
速度控制模式
2024/3/24
速度设定
通过模拟量输入或数字通信接口设定目标速度。
速度调节
采用PID控制算法,对实际速度与目标速度进行比较和调节,实 现速度的稳定控制。
加减速控制
通过设定加速度和减速度参数,实现电机的平滑启动和停止。
21
位置控制模式
PM340还配备了过流、过压、过热等保护功能,确保伺服驱动系统的安全运行。
2024/3/24
14
编码器接口与信号处理
编码器信号的处理对于伺服系统的性能至关重要。西 门子S120伺服驱动系统采用了先进的数字信号处理 技术,可以对编码器信号进行高速、高精度的采样和 处理,确保伺服系统的精确控制和平稳运行。
系统调试等步骤。
2024/3/24
效果评估
对改造后的进给轴驱动系统进行性能评估 ,包括驱动能力、控制精度、稳定性等指 标,验证改造效果。
34
案例三:自动化生产线物料搬运机器人应用
需求分析
了解自动化生产线物料搬运机器人的应用场景和需求,包 括搬运效率、定位精度、运动控制等方面的要求。
方案设计
根据需求,设计基于西门子S120伺服驱动器的物料搬运 机器人控制系统方案,包括硬件选型、控制策略制定、软 件编程等。
SGD7S120A00A驱动器说明书手册分解
SGD7S-120A00A驱动器说明书手册伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
中文名伺服电机外文名Servo motor 类型设备使用场合自动控制系统目录1 工作原理2 发展历史3 选型比较4 调试方法5 性能比较6 选型计算7 制动方式8 注意事项9 特点对比10 使用范围11 主要作用12 优点工作原理编辑1、伺服系统(servo mechanism)是使物体的位置、方位、伺服电机状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001 mm。
直流伺服电机分为有刷和无刷电机。
有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),产生电磁干扰,对环境有要求。
因此它可以用于对成本敏感的普通工业和民用场合。
无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。
控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。
基于S7-1200PLC的小型立体仓库控制系统设计
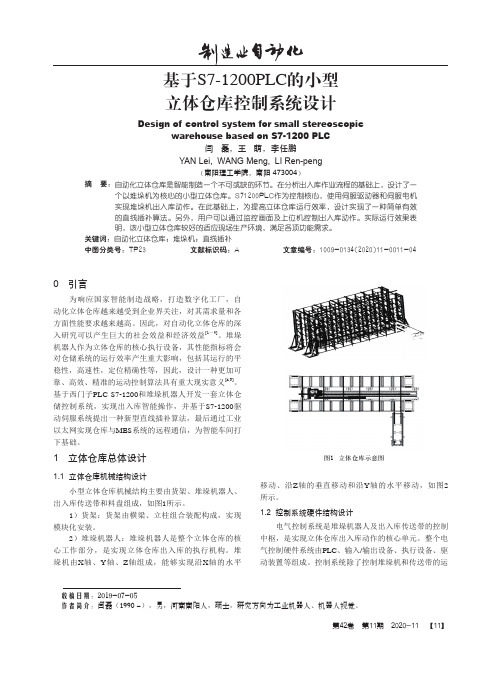
图1 立体仓库示意图
移动、沿Z轴的垂直移动和沿Y轴的水平移动,如图2 所示。 1.2 控制系统硬件结构设计
电气控制系统是堆垛机器人及出入库传送带的控制 中枢,是实现立体仓库出入库动作的核心单元。整个电 气控制硬件系统由PLC、输入/输出设备、执行设备、驱 动装置等组成。控制系统除了控制堆垛机和传送带的运
2.3 自动认址算法设计
自动认址是指用户给定目标货位的行列数值后, 堆垛机可以接收并识别货位信息,然后自动移动至目标 位。此功能可分为两个步骤,第一,堆垛机自动识别目 标位置。第二,堆垛机精准移动到目标位置。
本系统所设计的自动化立体仓库货架分为前后两 排,每一排有五行,十列,共94个货位。绝对认址算法 算法分析如下:
控制系统IO配置如表1所示。
表1 I/O列表
变量名称
地址
变量名称
地址
机器人准备好信号 I0.0
出料感应2
I9.0
机器人运行信号
I0.1
变频器报警
I9.1
【12】 第42卷 第11期 2020-11
ਈ仁ಘ
;䖤ժᴽ 傡ࣘಘ
<䖤ժᴽ 傡ࣘಘ
图4 系统硬件组态
=䖤ժᴽ 傡ࣘಘ
变量名称 X轴左限位 X轴右限位
1 立体仓库总体设计
1.1 立体仓库机械结构设计 小型立体仓库机械结构主要由货架、堆垛机器人、
出入库传送带和料盘组成,如图1所示。 1)货架:货架由横梁、立柱组合装配构成,实现
模块化安装。 2)堆垛机器人:堆垛机器人是整个立体仓库的核
心工作部分,是实现立体仓库出入库的执行机构。堆 垛机由X轴、Y轴、Z轴组成,能够实现沿X轴的水平
X轴原点 Y轴左限位 Y轴右限位
Y轴原点 Z轴上限位 Z轴下限位 Z轴原点 机器人完成信号
2024西门子S120驱动器入门教程CU320

西门子S120驱动器入门教程CU320•驱动器简介与基本概念•硬件安装与接线指导•软件配置与参数设置详解•运动控制功能实现目•维护与保养建议•总结与展望录01驱动器简介与基本概念它提供了广泛的功率范围和模块化设计,可灵活适应不同的机械和控制需求。
S120驱动器采用了先进的控制算法,确保了精确、快速和稳定的运动控制。
西门子S120是一款高性能的驱动器,专为满足现代工业应用而设计。
西门子S120驱动器概述CU320是S120驱动器的控制单元,负责驱动器的控制和通信任务。
它具有强大的处理能力和丰富的接口,可连接多种编码器和传感器。
CU320还支持多种控制模式,包括速度控制、位置控制和力矩控制等。
CU320控制单元特点西门子S120驱动器广泛应用于机械制造、印刷、包装、纺织等领域。
其主要优势在于高精度控制、快速响应、高可靠性和易于维护等方面。
此外,S120驱动器还支持多种现场总线协议,方便与上位机或PLC进行通信。
应用领域及优势分析驱动器控制单元编码器传感器相关术语解释一种电力电子设备,用于控制电机的速度、位置和力矩等参数。
一种测量装置,用于检测电机的位置和速度等参数。
驱动器的核心部件,负责处理控制信号和通信任务。
一种检测装置,用于检测电机的电流、电压、温度等状态参数。
02硬件安装与接线指导西门子S120驱动器CU320外观紧凑,结构坚固,适应各种工业环境。
接口丰富,包括电源接口、编码器接口、通讯接口等,满足各种连接需求。
驱动器面板上配有LED显示屏和按键,方便用户进行参数设置和故障诊断。
驱动器外观及接口介绍电源连接注意事项确保电源电压与驱动器额定电压相匹配,避免过压或欠压对驱动器造成损坏。
电源线应使用符合规格的电缆,并确保接线牢固、可靠。
对于大功率驱动器,应考虑电源线的线径和长度,以减小压降和温升。
编码器电缆连接方法01编码器电缆应使用屏蔽电缆,以减小电磁干扰对编码器信号的影响。
02电缆长度不宜过长,一般不超过50米,以减小信号衰减和干扰。
V90伺服最常用的PTI调试

V90伺服最常用的PTI调试西门子公司为适应小型运动控制需求,推出一款小型高性能伺服SINAMICS V90。
SINAMICS V90 伺服驱动和SIMOTICS S-1FL6 伺服电机组成了性能优化,易于使用的伺服驱动系统,八种驱动类型,七种不同的电机轴高规格,功率范围从0.05kW到7.0kW以及单相和三相的供电系统使其可以广泛用于各行各业,如:定位,传送,收卷等设备中,同时该伺服系统可以与S7-1500T/S7-1500/S7-1200 进行完美配合实现丰富的运动控制功能。
分为脉冲序列版本(PTI)和PROFINET版本(PN)两种,如下图所示:支持以下几种运动模式:1)外部脉冲位置控制模式(PTI)2)内部设定值位置控制模式(IPOS)3)速度模式(S)4)转矩模式(T)PTI是伺服应用中最基本使用最频繁的模式。
通过PLC发送高速脉冲来驱动伺服进行定位,对于伺服的调试较为简单,繁琐的是在PLC中编写高速脉冲输出程序。
首先应该对外部硬件连接,如下图所示。
接下来开始对参数进行调试,可以通过驱动器面板和V-ASSISTANT软件两种方式调试参数,但软件与驱动器连接后面板则无法使用。
此处简单介绍面板设置参数的方法,面板如下图所示。
启,方法如下图所示:所有参数调试完成后都需要进行断电保持设置,将修改的参数存储到ROM保持区,否则断电后恢复缺省值,方法如下图所示。
设置参数步骤如下图所示:在进入参数设置前需要选择正确的参数组号如P0A,0B,0C,0D等,也可选择P ALL组,进入后通过<移位键来修改参数编号,如下图所示。
注意:初次上电驱动器未与PLC相连时,常出现F7491 、F7492和A52902号错误。
原因为顺时针行程限制信号(CWL)和逆时针行程限制信号(CCWL)以及急停(EMGS)这三个信号为OFF。
默认必须为ON才可运行,如果实际使用时无需用到这三个功能,可通过把P29300的第1、2、6位设为1来强制为ON,如下图所示。
西门子伺服控制系统应用教案课件PPT
外形
脉冲编码器的分类和结构脉冲编码器是一种旋转式脉冲发生器,能把机械转角变成电脉冲,可作为位置检测和速度检测装置。脉冲编码器分为:光电式、接触式和电磁感应式。从精度和可靠性方面来看,光电式脉冲编码器优于其他两种。脉冲编码器是一种增量检测装置,它的型号是由每转发出的脉冲数来区分。数控机床上常用的有:2000P/r、2500 P/r和3000 P/r等。
3.转矩控制模式
图6-7 转矩控制模式的组成结构图
伺服驱动器的输入信号可以是开关,也可以由PLC产生
安川伺服驱动器安装与接线
伺服单元整体介绍认识各个端子;如何接线;点动实现;
伺服单元整体介绍
伺服单元型号的判别方法
B、认识各个端子、伺服驱动器主回路端子
型号:SGDN-120A
主电路电源
控制电路电源
杯形转子图bFra bibliotekNS
⊙
⊙
⊙
⊕
⊕
A
C
B
Z
Y
X
⊕
工作原理
当定子三相绕组通上交流电源后,就产生一个旋转磁场,该旋转磁场将以同步转速n0旋转。由于磁极同性相斥,异性相吸与转子的永磁磁极互相吸引,并带着转子一起旋转,因此,转子也将以同步转速n0与旋转磁场一起旋转。当转子加上负载转矩之后,转子磁极轴线将落后定子磁场轴线一个θ角,随着负载增加,θ也随之增大;负载减少时,θ角也减少;只要不超过一定限度,转子始终跟着定子的旋转磁场以恒定的同步转速n0旋转。
西门子伺服控制系统原理及应用
一.伺服的作用
伺服电动机又称为执行电动机,其功能是把输入的电压信号变换成电机转轴的角位移或角速度输出。输入的电压信号又称为控制信号或控制电压,改变控制电压的大小和电源的极性,就可以改变伺服电动机的转速和转向。其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
•
多轴组态包含下列部件:
• SIMOTION D4x5
D4x5(控制单元)包含SIMOTION的
模块化实时系统和SINAMICS S120驱动软件,通常D4x5支
持操作多个轴/驱动器。
• 电源
SINAMICS电源(供电模块)从供电系统产生DC母
线电压。
• 功率模块 SINAMICS功率模块(电机模块)用于控制电机。
第13页/共93页
讲师:XXX
• DRIVE-CLiQ D4x5有4-6个DRIVE-CLiQ接口,此处连接 功率模块、电源模块和其它模块
• 数字量输入/输出 数字量输入/输出分配给SINAMICS, 可用于驱动器控制
• 电源 用于模块供电的24V 连接 • 以太网连接 D435有两个以太网接口,例如SIMOTION
第15页/共93页
讲师:XXX
第16页/共93页
讲师:XXX
第17页/共93页
讲师:XXX
• SIMOTION D4x5 模块作为其中央硬件部件,由实时 系统 (SIMOTION RT) 和SINAMICS S120控制单元组 成。
• SIMOTION系统负责轴的运动控制和位置控制 SINAMICS控制单元完成所连接驱动器的速度电流控制。
第6页/共93页
讲师:XXX
SIMOTION作为一个集成的运动控制系统,重点面向于生产 机械的自动化。它在工程设计、编程、通讯、数据管理、人 机界面(HMI)中达到的统一性和集成性包含所有的系统部件, 当然也包含所有的不同硬件平台。
第7页/共93页
讲师:XXX
2、硬件介绍及描述
✓ 硬件介绍: SIMOTION 有三种硬件平台,即基于控制 器SIMOTION-C、基于PC 的SIMOTION-P 和基于驱动的 SIMOTION-D。 描述:SIMOTION-D 内部集成SINAMICS S120 驱动控 制单元,特别适合紧凑和模块化的设计。有多种型号可供 选择(D410、D425、D435、D445 和D445-1),最多 可带64 根轴,最小用户任务周期为0.5ms,最小总线循环 时间为0.5ms。支持PROFIBUS、PROFINET 及工业以太网 等通讯方式。
第18页/共93页
讲师:XXX
第19页/共93页
讲师:XXX
• 电源模块 电源模块将进线电源整流输出一个DC电压,为电 机模块供电。调节型电源模块:产生一个可调节的、具有再生 反馈能力的DC母线电压。
• 机电一体化的出现
当今,“智能部件”在现代机械和
生产设备设计中起主要作用,这些“机电部件”由机械部件、
传感器、执行器、电子部件和软件构成。
•
机电一体化解决方案系统总体解决途径。在机电一体化
中,一个机器或生产设备不仅在机械方面被加以考虑,而且
被视作一个集成了机械部件、电子装置、控制工程和软件技
术的完整系统。
• DRIVE-CLiQ 通过DRIVE-CLiQ连接,使用高速串行总 线实现驱动系统各个部件之间的通讯。除可连接功率部件之 外,还可通过DRIE-CLiQ连接编码器系统和专用的DRIVECLiQ I/O 。
•
通过DRIVE-CLiQ接口,可以获取具体到某个部件的诊
断信息。
第12页/共93页
讲师:XXX
• SINAMICS单元可提供 6个伺服控制和一个ALM(调节 型供电模块)控制。
• 伺服模式:最多6个驱动器 + 1个ALM
• 矢量模式:最多4个驱动器 + 1个ALM
• 可以混合使用矢量和伺服模式。
• SIMOTION系统通过集成的PCI总线 (PROFIBUS_Integrated)与集成的SINAMICS控制单元 通讯,总线连接的组态和编程方式与连接至 SIMOTION RT的两个外部PROFIBUS子网的组态和编 程方式完全相同。
可使用它们来连接一个PC和一个HMI 设备。
• PROFIBUS连接 连接扩展驱动或分布式 I/O。
• CF卡插槽 存储卡插槽(CF卡) • BOP 插槽 : BOP的插槽(基本操作面板) • 操作模式选择开关:通过该旋钮选择开关设置操作模式,
例如将CPU设为RUN模式。在模式选择开关旁边有一行 LED,这些LED 指示CPU的状态。 • 开放式插槽:可在该插槽中插入选件模块,如扩展I/O 。
第3页/共93页
讲师:XXX
目录
一
SIMOTION D的硬件描述
二 系统基本组态及调试步骤
三 任务执行系统及轴工艺对象
四 单轴基本运动命令及同步操作
第4页/共93页
讲师:XXX
1、背景概述
第5页/共93页
讲师:XXX
• 早期的机器概念 在早期的机器中,一般仍然使用诸如凸轮 盘、齿轮、离合器、主传动轴等机械部件。
第8页/共9XX
第10页/共93页
讲师:XXX
SIMOTION D多轴系统结构图 SIMOTION D单轴系统结构图
第11页/共93页
讲师:XXX
• 多轴
SIMOTION控制器和SINAMICS S120 驱动器模
块构建了一个多轴结构,各个部件通过DRIVE-CLiQ 连接。
第14页/共93页
讲师:XXX
SIMOTION D425、D435 和 D445-1 模块带 有记忆过程变量的 320 KB 非易失 SRAM(后备电池供电)。 该备份可存储至少 5 天。 若将数据保存更长时间,可通过以下两种方 法: • 系统指令,将其存储到 SIMOTION D4x5 的 CF 卡上 • 使用电池模块( 组合电池/ 风扇模块已包 含在 SIMOTION D445-1 交付范围内,SIMOTION D425/D435 可选) 可连接I/O PROFINET IO:(可通过 CBE30) • SIMATIC ET 200S/M/pro 分布式 I/O • 带有 CU320 控制单元的分布式驱动器 (通过 CBE20)和带有 CU310 PN 的 SINAMICS S120 PM340 功 率模块
讲师:XXX
西门子伺服驱动课程培训
讲师:崔浩桐 用时:2课时
第1页/共33页
讲师:XXX
学习守则
按时
震动或静音
积极讨论、分享
第2页/共93页
举手
讲师:XXX
课程目标
完成 X小时的培训后,学员能:
清楚SIMOTION D的硬件描述 系统基本组态及调试步骤 任务执行系统及轴工艺对象 清楚厂内机械臂单轴基本运动命令及同步操作