汽车总线CAN BUS的保护设计详解
CAN Bus简介

CAN总线在智能网联汽车中的技术挑战
需要解决高实时性、高可靠性、高安全性等方面的技术问题。
THANKS
感谢观看
CAN Bus技术演进
高速CAN总线技术
目前CAN总线已达到1Mbps,未来将进一步提高至4Mbps或更高,以满足日益增长的数 据传输需求。
低压CAN总线技术
低压CAN总线以其灵活性和低成本性在汽车电子领域得到广泛应用,未来将进一步优化 其性能和可靠性。
CAN总线与互联网技术的融合
随着物联网技术的发展,CAN总线将与互联网技术融合,实现远程监控和管理,提高汽 车智能化水平。
CAN Bus被用于工业自动化控制 系统中的数据传输和控制,例如工 厂自动化生产线、机器人控制系统 等。
其他领域
除了汽车和工业自动化领域,CAN Bus还被应用于医疗设备、航空航 天、智能家居等领域中。
02
CAN Bus通信协议
CAN协议概述
01
CAN是控制器局域网(Controller Area Network)的缩写, 它是一种用于汽车和其他工业应用场合的通信协议。
应用
与CAN控制器一起广泛应用于汽 车、工业自动化、楼宇自动化等
领域。
CAN总线电阻
作用
CAN总线电阻用于匹配总 线上的阻抗,以确保数据 传输的稳定性和可靠性。
类型
分为终端电阻和线电阻两 种类型。
应用
在CAN总线系统中,终端 电阻通常用于连接CAN控 制器和CAN收发器,而线 电阻用于连接其他设备。
灵活性
CAN Bus支持多种数据传输速 率,同时可以适应不同的网络 环境,具有较强的灵活性。
成本效益
can总线安全保护措施
can总线安全保护措施Can总线是一种常用于汽车电子系统中的通信协议,它负责连接车辆中的各个电子设备,如发动机控制单元、车身控制单元、空调控制单元等。
Can总线的安全保护措施至关重要,可以有效防止恶意攻击或意外事件对车辆系统造成的危害。
本文将从物理层安全、数据层安全和应用层安全三个方面介绍Can总线的安全保护措施。
一、物理层安全物理层安全是Can总线安全的第一道防线,主要包括以下几个方面的保护措施:1.1 隔离措施:Can总线通常会分为不同的网络,如车身网络、发动机网络等,通过物理隔离可以防止网络间的干扰或攻击。
同时,Can总线还可以与其他系统分开布线,避免外部设备对总线的干扰。
1.2 电气特性:Can总线在物理层面上具有一定的电气特性,如电压范围、电流限制等。
车辆制造商可以通过设定Can总线的电气特性来限制非法设备的接入或恶意攻击。
1.3 认证与加密:为了确保Can总线的安全性,可以采用认证和加密的手段来验证和保护数据的完整性和机密性。
例如,对Can总线上的通信进行数字签名或加密,只有通过认证的设备才能接收或发送数据。
二、数据层安全数据层安全是指在Can总线通信的数据传输过程中保护数据的安全性,主要包括以下几个方面的保护措施:2.1 数据校验:Can总线通信中,数据的正确性至关重要。
为了确保数据的准确传输,可以采用CRC校验等方法来检测和纠正数据传输中的错误。
2.2 数据过滤:Can总线上的数据通常非常庞大,为了提高数据传输的效率和安全性,可以通过过滤器来限制只接收特定的数据。
这样可以避免非法设备发送无关或恶意数据。
2.3 数据授权:Can总线上的各个设备需要进行数据的读取和写入操作,为了保护数据的安全性,可以通过访问控制机制来限制设备的读写权限。
只有具备相应权限的设备才能读取或写入数据。
三、应用层安全应用层安全是指在Can总线上的应用程序中保护数据的安全性,主要包括以下几个方面的保护措施:3.1 身份认证:Can总线上的设备需要进行身份认证,确保只有合法的设备才能接入系统。
汽车CAN总线防护方案
汽车CAN总线防护方案
——硕凯电子(Sylvia)
1、应用背景
A、汽车上各种电子控制单元的数目不断增加,连接导线显著增加,因浪涌损害的情况加剧。
B、总线的通信介质可以是双绞线,同轴电缆或光导纤维,通信速率可达1Mbps/40m,距离可达10km/40Kbps。
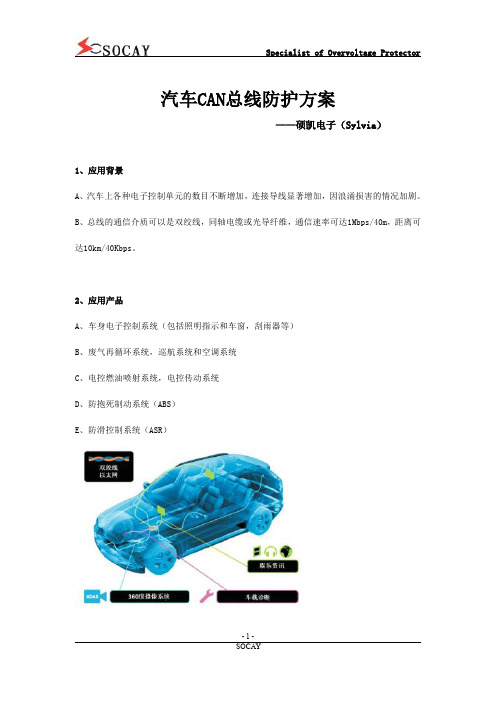
2、应用产品
A、车身电子控制系统(包括照明指示和车窗,刮雨器等)
B、废气再循环系统,巡航系统和空调系统
C、电控燃油喷射系统,电控传动系统
D、防抱死制动系统(ABS)
E、防滑控制系统(ASR)
3、应用方案
4、方案说明及注意事项
A、本方案采用残压很低的TSS,有效保护RS485/232芯片,满足IEC61000-4-5等浪涌标准。
B、方案中的TSS反应时间为ns级,既可防浪涌,又可防静电,满足IEC61000-4-2等静电标准。
C、方案中的TSS结电容小,信号无衰减,不影响控制线的传输。
D、本方案在差模,共模均采用的是同型号的TSS,防护无死角。
E、可通过10/700μS(等效内阻40ohm)浪涌测试,静电测试。
汽车车身电控系统检修-CANBUS总线系统结构及传输原理

CAN-BUS总线系统结构及传输原理
一、CAN-BUS总线系统的结构
(4)数据总线 CAN数据总线是用于传输数据的双向数据线,分为CAN高位(CAN-High)线和 CAN低位(CAN-Low)数据线。数据没有指定接收器,数据通过数据总线发送给各 控制单元,各控制单元接收后进行处理。
CAN-BUS总线系统结构及传输原理
一、CAN-BUS总线系统的结构
(4)数据总线 CAN数据总线采用两条线相互扭结成双绞线,两条线上的电位是相反的,如果一条 线的电压是5V,另一条线就是0V,两条线的电压总和等于常值。双绞线可以有效防 止对车辆内的其他设备产生电磁干扰,同时也可消除因为电压在CAN数据总线上快 速变换而产生的磁场干扰。
CAN-BUS总线系统结构及传输原理
一、CAN-BUS总线系统的结构
CAN-BUS数据总线的数据传输原理在很大 程度上类似电话会议的方式。一个用户 (控制单元)向网络中“说出”数据,而 其他用户“收听”到这些数据。若控制单 元认为这些数据对它有用,它就接收并且 应用这些数据,而其他控制单元也许不会 理会这些数据。故数据总线里的数据并没 有指定的接收者,而是被所有的控制单元 接收及计算。
CAN-BUS总线系统结构及传输原理
三、CAN-BUS数据总线的传输过程
数据的具体传输过程: ③ 接收数据。所有与CAN-BUS数据总 线相连构成网络的控制单元成为接收器, 从CAN-BUS数据总线上接收数据。 ④ 检查数据。控制单元对接收到的数据 进行检查,看是否是其功能所需。 ⑤ 接受数据。如果所接收的数据是需要 的,它将被认可及处理,反之将其忽略。
奔驰S级轿车的CAN BUS系统的基础总结与分析

奔驰S级轿车的CAN BUS系统的基础总结与分析正确的CAN BUD 波形图首先,简单介绍一下什么是CAN总线,以及一些基本结构,CAN总线技术,一般我们称它为,控制器局域网。
简单来说,就是把车辆上面,控制单元,用总线连接在一起,互相通信。
共享每个控制单元锁采集的一些数据。
举个最简单的例子.奔驰S级,变速箱换挡,最基本参考是车速与发动机负荷(即驾驶员的需求,,油门踏板的踩下或者说节气门的开度反应了驾驶员得负荷请求)。
对于普通车辆,如果变速箱需要获得这两个信号,就必须直接从之后两个控制单元去采集信号,就比如最早的节气门系统,除了有信号线通到ME电脑,还有一根信号线肯定是通到变速箱电脑的。
所以这样没有总线的系统,会存在许多问题,例如,随着车辆电子集成度得提高,车辆内的布线会越来越多过多的线路,导致成本增加,并且过多的线路,也是会造成故障的易发性。
而且会阻止车辆的发展。
CAN总线技术就是在这种情况下研究出来的。
在说一下CAN总线的结构,一般情况下,CAN总线包括1—总线,汽车上面一般由双绞线组成,双绞线最大的作用是降低信号干扰的程度,每一根导线在传输中辐射的电波都会被另一根线上发出的电波抵消。
这样很利于CAN线的传播,并且有些CAN线可以运行单线模式,即使一条CAN线故障,整个CAN系统,还可运行。
同时,两条CAN线,一条有故障,另外一条还可以负责,确认故障。
2 CAN收发器(一般集成与控制单元呢,每个控制单元内,都有一个接收器,和一个发送器,用于在总线上,将自己需要的信息接收利用,同时将自己采集的信息,传递至CAN总线上,以便其他控制单元使用。
3—终端电阻,终端电阻作用为防止数据在终端被反射,并以回声的形式返回,数据在终端的反射会影响数据的传输。
在奔驰S级上面,终端电阻,有两种形式存在,一种位于CAN分配器中,一种位于某些控制单元内,(这个后面会具体介绍)4网关, 网关的主要功能是使连接在不同的数据总线上的控制单元能够交换数据。
汽车CAN总线保护简析

汽车CAN总线保护简析汽车自问世以来取得了长足发展。
现在的汽车拥有众多功能,包括自动和半(自动驾驶)、防抱死制动系统、电动助力转向、前后碰撞警告、车道辅助、自动泊车辅助和自动紧急制动等。
GPS 导航、车内氛围照明、环视摄像头、高级(信息)娱乐系统、有源(天线)等高级功能更是大多数现代汽车的标准配置。
每个车辆功能通常由单独的(电子)控制单元(ECU) 监测和控制。
每辆现代汽车中大约有50 到100 个ECU,每个ECU 负责一项或多项功能。
ECU 与多个(传感器)一起工作,例如发动机温度传感器、气压传感器、车门传感器等。
它接收来自传感器的信息,并相应地调整控制的车辆(参数)。
有时候,一个ECU 可能需要与其他ECU (通信)以执行指定的功能。
例如,如果您忘记把点火开关里的车钥匙拔出来,那相应的发动机控制ECU就会与车门ECU 通信,使车门保持打开状态且扬声器ECU发出警报。
通过(CAN)总线的ECU通信同一车辆内部的不同ECU之间进行数据传输会用到多种车载(网络)(IVN) 协议。
现代汽车最常用的通信机制是(控制器)局域网(CAN) 总线。
它是一种双向串行通信总线,使ECU 无需使用任何复杂的布线即可通信。
它使用特性阻抗为120Ω 的双绞线传输数据。
其中一根线被称为CAN_Low (CAN_L),另一根线被称为CAN_High (CAN_H),数据传输速率为1Mbit/s。
ECU 通过CAN 控制器(类似于处理所有活动必要数据的(微控制器))连接到CAN 总线。
还会有一个CAN (收发器)用于连接CAN 控制器和CAN 总线。
它将(晶体管)-晶体管逻辑(TTL) (信号)转换为实际的差分电压信号,供CAN 总线读取及解释。
CAN 总线架构如图1 所示。
图1 汽车CAN 总线架构CAN 总线的瞬态保护为具有50 到100 个ECU 的严苛汽车环境设计CAN (接口)系统时,必须确保充分保护,以免受(电气)过载事件(EOS) 的影响。
汽车通信CAN总线详解

CAN总线及应用实例(1)CAN特点●CAN为多主方式工作,网络上任意智能节点均可在任意时刻主动向网络上其他节点发送信息,而不分主从,且无需站地址等节点信息,通信方式灵活。
利用这特点可方便地构成多机备份系统。
●CAN网络上的节点信息分成不同的优先级(报文有2032种优先权),可满足不同的实时要求,高优先级的数据最多可在134,us内得到传输。
●CAN采用非破坏性总线仲裁技术,当多个节点同时向总线发送信息时,优先级较低的节点会主动地退出发送,大大节省了总线冲突仲裁时间。
●CAN只需通过报文滤波即可实现点对点、一点对多点及全局广播等几种方式收发数据,无需专门“调度”。
●CAN的直接通信距离最远可达l 0km(速率5kbp以下):通信速率最高可达Mbps(此时通信距离最长为40m) 。
●CAN上的节点数主要取决于总线驱动电路,目前可达110个;报文标识符可达2032种(CAN2.0A),而扩展(CAN2.0B)的报文标识符几乎不受限制。
(2)CAN总线协议CAN协议以国际标准化组织的开放性互连模型为参照,规定了物理层、传输层和对象层,实际上相当于ISO网络层次模型中的物理层和数据链路层。
图3.9 为CAN总线网络层次结构,发送过程中,数据、数据标识符及数据长度,加上必要的总线控制信号形成串行的数据流,发送到串行总线上,接收方再对数据流进行分析,从中提取有效的数据。
CAN协议的一个最大特点是废除了传统的站地址编码,而代之以对通信数据块进行编码,数据在网络上通过广播方式发送。
其优点是可使网络内的节点个数在理论上不受限制(实际中受网络硬件的电气特性限制),还可使同一个通信数据块同时被不同的节点接收,这在分布式控制系统中非常有用。
CAN 2.0A版本规定标准CAN的标识符长度为11位,同时在2.0 B版本中又补充规定了标识符长度为29位的扩展格式,因此理论上可以定义2的11次方或2的19次方种不同的数据块。
遵循CAN 2.0 B协议的CAN控制器可以发送和接收标准格式报文(11位标识符)或扩展格式报文(29位标识符),如果禁止CAN 2.0B则CAN控制器只能发送和接收标准格式报文而忽略扩展格式的报文,但不会出现错误。
汽车级CAN总线详细教程看过了很好教学课件
CAN总线错误处理与故障界定
错误类型与检测:列举CAN 总线中可能出现的位错误、 填充错误、CRC错误、格式 错误和应答错误等,并解释 其检测原理。
错误处理机制:阐述CAN总 线的错误处理机制,包括错 误标志的设置、错误界限的 确定、错误帧的发送等。
故障界定与诊断:介绍如何 通过CAN总线的错误处理机 制,界定故障节点和故障类 型,以及相应的故障诊断方 法。
线通信错误案例,解释干扰的来源和影响,提供针对性的解决方案。
03
案例三
软件配置错误引发的CAN总线故障:分享一个由于软件配置错误导致的
CAN总线故障案例,强调正确配置软件参数的重要性,并给出修复方法。
总结与展望
汽车级CAN总线教程总结
本教程详细介绍了汽车级CAN 总线的原理、架构、通信协议和
应用等方面的知识。
软件配置故障
分析由于软件配置错误导致的CAN总线故障,如波特率设置错误、 节点地址冲突等,并给出相应的排查和修复建议。
实际应用中的CAN总线故障案例分析
01
案例一
某车型CAN总线通信中断故障:详细描述某车型CAN总线通信中断的
故障现象,分析故障原因,并给出具体的排查和修复步骤。
02
案例二
CAN总线信号干扰导致的通信错误:介绍由于信号干扰导致的CAN总
设计方案和电路图。
01
03
02 04
软件实现
阐述门窗控制系统的软件设计, 包括CAN总线通信、控制算法、 防夹手功能实现等,给出相应的 软件流程和代码片段。
系统测试与验证
展示门窗控制系统的测试环境和 测试结果,验证系统的可靠性、 实时性和准确性。
基于CAN总线的车身控制系统设计
车身控制需求分析
汽车CAN总线原理与设计

汽车CAN总线原理与设计一、CAN总线发展史CAN是Controller Area Network的缩写CAN最早由德国BOSCH(博世)开发,目前已经是国际标准(ISO 11898),是当前应用最广泛的现场总线之一。
BOSCH 主要是做汽车电子的,因此CAN 一开始主要是为汽车电子准备的,事实也是如此,CAN协议目前已经是汽车网络的标准协议。
当然了,CAN不仅仅应用于汽车电子,经过几十年的发展,CAN协议的高性能和高可靠性已经得到了业界的认可,目前除了汽车电子以外也广泛应用于工业自动化、医疗、工业和船舶等领域。
以汽车电子为例,汽车上有空调、车门、发动机、大量传感器等,这些部件都是通过CAN 总线连在一起形成一个网络,车载网络结构如图:二、CAN总线标准CAN总线标准只规定了物理层和数据链路层,需要用户自定义应用层。
不同的CAN标准仅物理层不同。
11898协议:∙iso的osi模型∙11898-1对应controller∙11898-2对应高速can收发器∙11898-3对应低速can收发器∙11898-4增加时间触发通讯机制can总线协议主要工作在osi模型中的物理层和数据链路层ISO 11898-2 和ISO 11898-3主要应用于物理层,两种can收发器主要是对应的茶分电压不一样。
ISO 11898-1主要应用于数据链路层。
∙LLC用于接收滤波、超载通告、回复管理;∙MAC用于数据封装/拆封、帧编码、媒体访问管理、错误检测与标定、应答、串转发/并转串;∙PLS用于位编码/解码、位定时、同步;∙PMA为收发器特性。
三、CAN总线特点∙符合OSI开放式通信系统参考模型;∙两线式总线结构,电气信号为差分式;∙多主控制,在总线空闲时,所有的单元都可开始发送消息,最先访问总线的单元可获得发送权;多个单元同时开始发送时,发送高优先级ID消息的单元可获得发送权;∙点对点控制,一点对多点及全局广播几种传送方式接收数据,网络上的节点可分成不同的优先级,可以满足不同的实时要求;∙采用非破坏性位仲裁总线结构机制,当两个节点同时向网络上传送信息时,优先级低的节点主动停止数据发送,而优先级高的节点可不受影响地继续传送数据∙消息报文不包含源地址或者目标地址,仅通过标识符表明消息功能和优先级;∙基于固定消息格式的广播式总线系统,短帧结构;∙事件触发型,只有当有消息要发送时,节点才向总线上广播消息;∙可以通过发送远程帧请求其它节点发送数据;∙消息数据长度0~8Byte;∙节点数最多可达110个;∙错误检测功能。
汽车CAN总线技术简单介绍ppt课件

在 车型上, 舒适系统和信 息系统共用一条总线,但可 能使用独立的1 CAN 总线的 DSO 波形
ppt精选版
30
网关:将两个使用不同协议的网络段连接在一起的设备。它的作用就 是对两个网络段中的使用不同传p输pt精协选议版 的数据进行互相的翻译转换31。
ppt精选版
32
汽车CAN总线技术原理
ppt精选版
1
ppt精选版
2
ppt精选版
3
ppt精选版
4
ppt精选版
5
ppt精选版
6
ppt精选版
7
ppt精选版
8
LIN总线
LIN是一种低速串行总线,其提出是针对汽车应用的,主要用于汽车电子控制 系统,实现智能传感器、执行器等的连接。LIN定位于汽车上的下层局部网络。由 CAN构成汽车的上层主干网络,而在不需要CAN的高速与多功能性的场合则由LIN 来构成下层局部网络,实现分级制网络结构,以达到合理分配利用网络资源、提 高线路布置的方便灵活性、降低成本的目的。
ppt精选版
9
ppt精选版
10
ppt精选版
11
ppt精选版
12
ppt精选版
13
ppt精选版
14
ppt精选版
15
ppt精选版
16
ppt精选版
17
ppt精选版
18
MOST总线专门用于满足要求 严格的车载环境。这种新的基 于光纤的网络能够支持24.8 Mbps的数据速率,与以前的 铜缆相比具有减轻重量和减小 电磁干扰(EMI)的优势。
Convenience CAN
High:橙/绿 Low: 橙/棕
Infotainment CAN
汽车can总线系统原理设计与应用

汽车can总线系统原理设计与应用汽车CAN总线系统原理设计与应用一、引言汽车CAN总线系统是现代汽车电子控制系统中的重要组成部分,它采用了一种先进的通信协议,为汽车电子控制单元(ECU)之间提供了高效可靠的数据传输方式。
本文将介绍汽车CAN总线系统的原理设计与应用。
二、汽车CAN总线系统的原理设计1. 总线拓扑结构汽车CAN总线系统采用了总线拓扑结构,即多个ECU通过一根总线进行通信。
这种结构可以有效减少线缆的使用量,降低系统成本,并且具有良好的可扩展性。
2. CAN通信协议汽车CAN总线系统采用了CAN通信协议,它是一种基于事件驱动的通信协议。
CAN总线上的每个ECU都有一个唯一的标识符,用于区分不同的节点。
当一个节点有数据需要发送时,它会将数据发送到总线上,并附带自己的标识符。
其他节点会监听总线上的数据,当收到符合自己标识符的数据时,就会接收并处理。
3. 数据传输汽车CAN总线系统采用了差分传输方式,即数据信号由两个相对电平相反的信号线组成。
这种方式可以有效降低传输过程中的电磁干扰,提高数据传输的可靠性。
4. 容错机制汽车CAN总线系统具有良好的容错机制,当总线上发生错误时,系统能够进行自我修复。
CAN总线采用了循环冗余校验(CRC)技术,可以检测数据传输过程中的错误。
此外,CAN总线还具有冲突检测和错误重传机制,确保数据的可靠传输。
三、汽车CAN总线系统的应用1. 发动机控制系统汽车CAN总线系统在发动机控制系统中发挥着重要作用。
各个传感器和执行器通过CAN总线连接到发动机控制单元(ECU),实现对发动机的监测和控制。
通过CAN总线,发动机控制单元可以获取发动机的工作参数,并根据这些参数进行精确的控制,提高发动机的性能和燃油经济性。
2. 制动系统汽车CAN总线系统在制动系统中也有广泛应用。
刹车踏板的行程传感器、刹车盘温度传感器、刹车液位传感器等信息通过CAN总线传输到制动控制单元(ECU),实现对制动系统的实时监测和控制。
汽车CAN-BUS多路信息传输系统介绍
目录
• 引言 • CAN-BUS技术概述 • 汽车CAN-BUS多路信息传输系统原
理 • 汽车CAN-BUS多路信息传输系统应
用实例 • 挑战与解决方案 • 未来发展趋势与前景展望
01 引言
目的和背景
汽车电子化和智能化发展
随着汽车技术的不断进步,汽车内部的电子控制系统越来越 多,需要一种高效、可靠的数据传输系统来实现各个系统之 间的信息交换。
安全性问题
汽车CAN-BUS系统涉及到车辆控制和安全等方面,因此需要解决 网络安全和信息安全问题。
解决方案及创新思路
优化网络拓扑结构
通过优化CAN-BUS网络的拓扑结构,提高信息传 输的效率和实时性。例如,采用星型、树型等拓 扑结构,减少信息传输的延迟和冲突。
加强网络安全防护
采用加密、认证等网络安全技术,确保CAN-BUS 系统的信息安全和网络安全。同时,建立完善的 网络安全防护体系,防止恶意攻击和非法访问。
节能控制
通过CAN-BUS系统实现发动机与其他控 制单元的协同工作,如与变速箱控制单元 协同实现最佳换挡策略,降低油耗。
故障诊断
当发动机出现故障时,控制单元可以通 过CAN-BUS系统将故障信息发送给仪 表盘,以便驾驶员及时了解并处理。
实例二:车身电子稳定系统中的应用
实时监控
车身电子稳定系统通过CAN-BUS系统实时获取车辆动态参数(如车 速、横摆角速度、侧向加速度等),以判断车辆是否处于稳定状态。
提高汽车性能和安全性
通过CAN-BUS多路信息传输系统,可以实现汽车各个系统之 间的实时数据共享和协同工作,从而提高汽车的整体性能和 安全性。
报告范围
CAN-BUS多路信息传输系统基 本原理:介绍CAN-BUS多路信
大众汽车车载CAN总线系统设计
大众汽车车载CAN总线系统设计大众汽车车载CAN总线系统设计摘要:随着汽车电子技术的持续发展,汽车上越来越多的应用电子设备,电子控制设备的联系更加复杂,而汽车的传统电气系统一般都是采用点对点的单一通信,联系较少,因此,庞大的布线系统之间的联系已经无法满足逐渐复杂的汽车控制系统的要求。
本文以大众汽车车载CAN总线车身控制系统为研究对象,介绍了国际汽车电子技术的现状和发展趋势,与目前主流的汽车网络技术相比,本文分析了目前流行的现场总线的性能及特点,研究了CAN总线的汽车车身控制系统。
介绍了系统的硬件设计和开发过程。
说明了每个节点的作用,说明了每个模块硬件电路结构。
介绍了系统的软件设计和开发过程。
该论文讲述了CAN通信模块的通信流程。
通过本设计,大众汽车车载CAN 总线车身控制系统可以满足现代车身控制的需要。
关键词:车载网络;大众汽车车载CAN总线;车身控制系统Volkswagen car CAN bus system designAbstract: with the continuous development of automobile electronic technology, more and more electronic equipment used in automobile, electronic control equipment is more and more complex, the relation between the traditional auto electrical system is mostly single point to point communication, connect with each other very few, so lead to the connection between the huge wiring system has far cannot satisfy the requirement of increasingly complex auto control system. Automobile LAN CAN bus, which are widely used in automotive electronic control system, in order to realize intelligent and networked control part provides effective ways and methods.This topic with CAN bus body control system as the research object, mainly to do the summary of a few aspects: introduce the current status and development trend of internationalautomotive electronics technology, more mainstream in today's automotive network technology, a comprehensive analysis of the current popular features and performance of a variety of field bus, the further study of the CAN bus car body control system. Describes the hardware design and development of the system. According to the actual needs of the system, the design of each module of the system is determined. Detailed introduces the system function of each control node, describes the main control chip peripheral circuit, light control circuit, CAN communication module circuit, wiper control circuit, control circuit, window lock motor control circuit, the switch quantity detection circuit, electric rearview mirror control circuit hardware circuit for each module of the structure. Describes the software design and development process of the system. This article introduces the communication process for the CAN communication module.Key words: car network; vw vehicle CAN bus; Body control system;目录摘要 (I)Abstract ............................................................... II 目录.................................................................III 1 绪论 (1)1.1研究背景 (1)1.2 国内外研究现状 (1)1.3 本课题研究的目的和意义 (2)1.4 论文的主要内容 (2)2 CAN总线的工作原理 (4)2.1 CAN总线的特点 (4)2.2 CAN的分层结构 (4)2.3 CAN报文传输协议 (5)2.4 CAN节点的组成 (5)3 系统方案设计 (6)3.1车身控制系统的总体设计方案 (6)3.2车身控制系统各节点功能描述 (7)4 车身控制系统的硬件设计 (9)4.1 系统核心元器件选型 (9)4.1.1 微控制器芯片—MC9S08DZ16单片机 (9)4.1.2CAN总线驱动器—MC33388 (10)4.2系统硬件电路总体结构 (11)4.3系统各模块硬件电路的设计 (12)4.3.1单片机时钟及复位电路设计 (12)4.3.2电源模块电路设计 (13)4.3.3CAN节点通信电路设计 (14)4.3.4车窗的电机驱动电路设计 (15)4.3.5门锁电机驱动电路设计 (15)4.3.6后视镜电机驱动电路设计 (16)4.3.7雨刮电机驱动电路设计 (17)4.3.8车灯控制电路设计 (18)5 车身控制系统的软件设计 (20)5.1CAN通讯模块的软件设计 (20)5.1.1MSCAN模块的初始化 (20)5.1.2CAN数据报文的发送 (20)5.1.3CAN数据报文的接收 (21)6 结论与展望 (22)6.1全文总结 (23)6.2工作展望 (23)参考文献 (24)致谢 (25)1 绪论1.1研究背景当代汽车电子技术不断发展,电子装置的应用也越来越多。
汽车CAN总线详细教程
2003年,大众集团在新PQ35平台上使用五重结构的Canbus系统,并且出现了单线的LIN-BUS。
CAN技术的发展
20世纪80年代,Bosch的工程人员开始研究用于汽车的串行总线系统,因为当时还没有一个网络协议能完全满足汽车工程的要求。参加研究的还有Mercedes-Benz公司、Intel公司,还有德国两所大学的教授。 1986年, Bosch在SAE(汽车工程人员协会)大会上提出了CAN 1987年,INTEL就推出了第一片CAN控制芯片—82526;随后Philips半导体推出了82C200。 1993年,CAN的国际标准ISO11898公布 从此CAN 协议被广泛的用于各类自动化控制领域。
但是轿车上基于CAN的控制网络至今仍是各大公司自成系统,没有一个统一标准。
基于CAN的应用层协议应用较通用的有两种:DeviceNet(适合于工厂底层自动化) 和 CANopen(适合于机械控制的嵌入式应用)。 任何组织或个人都可以从DeviceNet供货商协会(ODVA)获得DeviceNet规范。购买者将得到无限制的、真正免费的开发DeviceNet产品的授权。 DeviceNet自2002年被确立为中国国家标准以来,已在冶金、电力、水处理、乳品饮料、烟草、水泥、石化、矿山等各个行业得到成功应用,其低成本和高可靠性已经得到广泛认同。
总线技术及应用
PART 1
CAN 数据总线(CAN BUS)
点击此处添加副标题
演讲人姓名
202X
CAN通信技术概述
CAN ( Controller Area Network ) 即控制器局域网络。由于其高性能、高可靠性、及独特的设计,CAN越来越受到人们的重视。国外已有许多大公司的产品采用了这一技术。
汽车CAN通讯总线全面解析
汽车CAN通讯总线全面解析一起解读CAN通讯总线:日新月异,随着时代的高速发展,汽车电子技术不断更新,所以我们要通过不断的学习来提高技术水平。
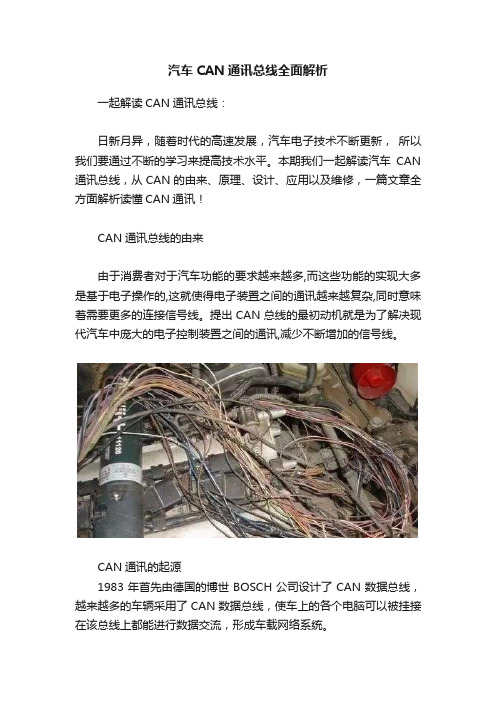
本期我们一起解读汽车CAN 通讯总线,从CAN的由来、原理、设计、应用以及维修,一篇文章全方面解析读懂CAN通讯!CAN通讯总线的由来由于消费者对于汽车功能的要求越来越多,而这些功能的实现大多是基于电子操作的,这就使得电子装置之间的通讯越来越复杂,同时意味着需要更多的连接信号线。
提出CAN总线的最初动机就是为了解决现代汽车中庞大的电子控制装置之间的通讯,减少不断增加的信号线。
CAN通讯的起源1983年首先由德国的博世BOSCH公司设计了CAN数据总线,越来越多的车辆采用了CAN数据总线,使车上的各个电脑可以被挂接在该总线上都能进行数据交流,形成车载网络系统。
“什么是CAN总线?”汽车不管有多少块电控单元,不管信息容量有多大,每块电控单元都只需引出两条线共同接在两个节点上,这两条导线就称作数据总线,亦称BUS线。
整个网络则称CAN,CAN是Controller Area Network(控制单元区域网络)的缩写,意思是控制单元通过网络交换数据。
CAN-BUS总线形象介绍:公交车:车辆通讯CAN总线:作一个比喻:总线系统又称作CAN-BUS,其实也是因为它的工作原理与运行中的公共汽车很类似。
其中每个站点相当于一个控制单元,而行驶路线则是CAN总线,CAN总线上传递的是数据,而公共汽车上承载的是乘客。
某个控制单元接收到负责向它发送数据的传感器的信息后,经过分析处理会采取相应措施,并将此信息发送到总线系统上。
这样此信息会在总线系统上进行传递,每个与总线系统连接的控制单元都会接收到此信息,如果此信息对自己有用则会存储下来,如果对其无用,则会进行忽略。
CAN总线的通讯原理:第一种『每项信息都通过各自独立的数据线进行交换』目前在车辆上应用的信息传递形式有两种。
第一种是每项信息都通过各自独立的数据线进行交换。
汽车电子系统中的CAN总线设计与实现
汽车电子系统中的CAN总线设计与实现随着现代汽车的不断发展,汽车电子系统变得越来越重要。
其中,CAN总线技术是汽车电子系统中最重要的技术之一。
CAN总线是一种高速实时通信总线,用于在汽车电子系统中进行数据传输和控制。
CAN总线技术的优点CAN总线技术在汽车电子系统中应用广泛,有以下几个优点:1. 高可靠性CAN总线技术采用差分信号传输,可以在干扰环境下稳定传输数据。
同时,CAN总线采用CRC校验,保证数据的可靠性。
2. 高带宽CAN总线速率高达1Mbps,可以满足汽车电子系统中大量数据的传输需求。
3. 易于安装CAN总线只需两根线即可实现通信,安装方便。
CAN总线的设计与实现CAN总线的设计与实现需要考虑以下几个方面:1. 系统拓扑结构CAN总线的系统拓扑结构可以是星型、总线型或混合型。
在汽车电子系统中,一般采用总线型拓扑结构。
总线型结构简单,成本低,易于维护和扩展。
2. 电气特性CAN总线的电气特性包括线的阻抗和终端电阻。
线的阻抗要匹配,终端电阻的值一般为120欧姆。
3. 通信协议CAN总线的通信协议包括数据帧格式、错误处理和通信速率等。
CAN总线的数据帧格式包括标准帧和扩展帧。
标准帧包括11位ID和8位数据,扩展帧包括29位ID和8位数据。
错误处理方面,CAN总线采用基于重传的错误处理机制。
通信速率可以选择1Mbps、500Kbps、250Kbps和125Kbps等。
4. 控制器选型CAN总线的控制器通常可以采用外部控制器和内部控制器。
内部控制器成本低,有利于集成,但性能不如外部控制器;外部控制器性能高,但成本高。
总之,CAN总线技术在汽车电子系统中有着广泛的应用,其优点明显。
在CAN总线的设计和实现过程中,需要考虑系统拓扑结构、电气特性、通信协议和控制器选型等方面。
只有全面考虑这些因素,才能设计出高可靠、高性能和稳定的汽车电子系统。
CAN总线如何防雷
CAN总线如何防雷CAN-bus起源于汽车总线,目前被广泛应用于环境复杂的工业现场,因此必要的总线防护是主板及设备安全的重要保障。
今天这里跟说一说CAN总线防雷防护设计。
从广义上讲防雷包含两个概念,一是防雷击二是防浪涌。
雷击是雷雨云中电荷瞬间释放的现象,它能在周围引起高能、瞬变的电场及磁场。
浪涌包括浪涌电流、浪涌电压,它是指电路中瞬间出现超过正常工作电压、电流的现象,如图1,雷击又可分为直击雷、非直击雷,直击雷是雷电直接作用到物体上,非直击雷则是通过电磁场感生出电动势、电流作用到物体上,两者都能产生浪涌电压、浪涌电流。
图1 电压浪涌CAN总线物理层传输介质一般为铜制双绞线,容易受到电磁场的干扰。
CAN 收发器属于弱电元器件,对电压电流的冲击毫无抵抗力,因此复杂工业现场CAN 总线的防雷设计十分必要。
CAN总线防雷要从两方面入手,一是CAN收发器处,即接口防护。
二是物理介质处,即传导防护。
防护的思路主要是屏蔽干扰、提供泄放通道、隔离保护。
一、接口防护CAN的接口防护一般是在收发器外加隔离保护器件,如光耦、磁耦等。
为接口设计方便,我们可以使用一体化的收发器模块。
相比于单个的收发器芯片,模块化的产品环境适应性更强。
图2是超小体积、隔离型CAN收发模块,这种模块可以挂载到CAN总线上,拥有高达2500VDC隔离耐压值。
图2 隔离型CAN收发模块及应用电路根据经验,隔离型模块在容易遭受大能量雷击的场合工作时,仍需要加更高等级的防护电路,保护模块不被损坏以及总线的可靠通信。
常用的器件有GDT、TVS以及共模电感。
如图3所示,GDT被放置于接口最前端,提供第一级的雷击浪涌防护。
当雷击、浪涌产生时,GDT瞬间达到低阻状态,为瞬时大电流提供泄放通道,将CAN_H、CAN_L间电压钳制在二十几伏范围内。
后端的TVS 提供第二级浪涌防护,具体规格可根据需求选择。
图3 高防护CAN接口电路上述推荐的接口电路虽然能够提供有效的防护,但是需要引入较多的电子器件,这也就意味着接口电路将占用更多的PCB空间,若器件参数选择不合适易造成EMC问题。
汽车总线CANBUS的保护设计详解

汽车总线CANBUS的保护设计详解汽车总线CAN BUS(Controller Area Network)是一项常用于汽车电子系统的通信协议,它允许车辆中的不同电子控制单元(ECU)之间实现高速的通信和数据共享。
由于CAN BUS在车辆中很重要,因此设计时需要采取一系列保护措施,以确保其可靠性和稳定性。
首先,CANBUS需要保护电路免受电磁干扰的影响。
电磁干扰可能来自于汽车电源线、引擎点火系统、可变速驱动器和其他电子设备。
为了降低电磁干扰的影响,可以使用滤波器来抑制高频噪声。
滤波器的类型可以根据具体需求选择,包括低通滤波器、带通滤波器和带阻滤波器等。
其次,CANBUS也需要保护电路免受过电压和过电流的影响。
过电压和过电流可能是由于车辆电源系统故障、短路或电路不当设计而引起的。
为了防止这种情况发生,可以使用保险丝、电压稳压器和过压保护电路。
保险丝能够在过电流时切断电路,保护CANBUS电路不受损害。
电压稳压器可以将不稳定的电压转换为稳定的电压,确保CANBUS电路正常工作。
过压保护电路则能够防止过高的电压进入CANBUS电路,保护其不受到损坏。
此外,还需要保护CANBUS免受短路和开路的影响。
短路可能是由于线束损坏、连接错误或ECU故障引起的。
为了防止短路对CANBUS产生影响,可以在线路上安装保护器件,如短路保护二极管。
这些保护器件能够在短路时切断电路,以保护CANBUS免受损坏。
另外,开路也可能导致CANBUS通信失败。
为了检测开路情况,可以将终端电阻安装在CANBUS线路的两端,通过检测线路上的信号电平变化来判断是否存在开路。
此外,对于CANBUS的保护设计还应考虑到防止恶意攻击和网络安全问题。
由于CANBUS是一种共享总线通信系统,没有加密或身份验证机制,因此可能受到恶意攻击者的攻击。
为了提高CANBUS的安全性,可以使用防火墙、加密算法和认证机制来保护CANBUS免受未经授权的访问和篡改。
汽车CAN总线防盗系统毕业设计
摘要目前我国汽车工业的飞速发展,汽车防盗的产品越来越多,于此原因设计一种基于S3C2410汽车防盗系统。
本课题选用S3C2410为核心控制器,利用多普勒微波传感器对汽车的震荡进行检测,用USB摄像头发送图像信息给汽车用户,利用S3C2410的USB接口连接个摄像头,将摄像头拍摄的图像发送给汽车用便于一旦汽车被盗时提供图像资料,有利于案件的破获。
本设计总体分为五大模块,主控制器模块、信息采集模块(传感器)、USB、摄像头模块、无线通信模块(GPRS MODEM )和图像压缩模块。
主控制模块包括S3C2410、触摸屏等;信息采集模块包括传感器、霍尔传感器等;USB、摄像头模块是收集图像资料;无线通信和图像压缩模块是将收集的图像发送给用户。
汽车CAN总线防盗技术是将防盗和网络有效的联系起来,将防盗智能化,突破传统的机械式防盗的弊端,但是,CAN总线防盗价格昂贵,暂时还不能在汽车领域广泛运用,只能在高档汽车上使用,将来运用更新的技术将CAN总线防盗广泛运用于汽车上是总线防盗的发展方向。
关键词:CAN总线;自动控制;局域网络AbstractWith the fast development of the auto industry of our country at present, there are more and more theft-proof products of automobile and we design one kind automobile burglary-resisting system in this reason based on the S3C2410.This subject selects S3C2410 for use as the key controller. It makes use of Utilize Doppler's microwave sensor to gauge shock of the automobile. It makes a video recording with USB camera to give image information to automobile users. It uses USB interface of S3C2410 to join a lens, sending automobile users the images taken by the camera, which offers image data in case of being stolen, thus -collecting module (the sensor) , USB, the lens module, the wireless communication module (GPRS MODEM ) and the image-compressing module, with the main controlling module including S3C2410, touch-sensitive screen, etc., the information-collecting module including the sensor, Hall's sensor, etc., USB and lens module to collect the picture materials, and the wireless communication module and the picture- compressing module to send the collected picture to users.The theft-proof technology of CAN bus for the automobile is to link up guarding against theft with the network effectively, making It intelligent to guard against theft, so this breaks through the drawback from the theft-proof of traditional machinery type. However, CAN bus guarding against theft costs an arm and a leg. It can't be applied extensively in the field of automobile yet temporarily. It can only be employed on the top-grade automobile. It is the right way that we can apply CAN bus to automobile bus theft-proof extensively to guard against theft in the future, by using newer technology.Key words:CAN Bus;Automatic Control;Local Area Network目录第1章绪论 (1)1.1 汽车防盗系统的发展 (1)1.2 未来汽车防盗技术发展方向: (2)1.3 防盗报警系统的组成和工作原理 (4)第2章系统总体设计 (5)2.1 系统的总体框架 (5)2.2 主控制模块设计 (5)2.2.1 LCD控制器 (5)2.2.2 手触屏设计 (10)2.3 USB、摄像头模块 (16)2.3.1 USB系统的配置 (16)2.3.2 摄像头 (16)2.4 无线通信模块 (17)2.5 信息采集模块 (17)2.5.1 数据采集 (17)2.5.2 图像报警 (19)2.6 操作系统 (20)2.6.1 网卡和串口的配置 (20)2.6.2 编译新内核 (20)2.7 防盗报警电路元器件的选择 (21)2.7.1 CPU的选择 (21)2.7.2 TFT屏选择 (22)2.7.3 USB摄像头的选择 (23)2.7.4 微波多普勒传感器选择 (23)第3章硬件电路设计 (24)3.1 S3C2410的LCD接口电路 (24)3.2 触摸屏电路设计 (25)3.3 霍尔开关电路 (27)3.4 振荡测试电路 (27)第4章软件设计 (30)4.1 触摸屏驱动流程图 (30)4.2 USB程序设计 (32)4.3 CAN总线接口软件设计 (33)4.4 ADS7843驱动程序的设计 (34)第5章结论 (36)5.1 系统组成 (36)5.2 实现功能 (36)5.3 系统的优缺点及发展前景 (36)参考文献 (38)致谢 (39)附录Ⅰ (40)附录Ⅱ (60)第1章绪论1.1汽车防盗系统的发展国外:美国的钥匙防盗技术美国得克萨斯仪器公司下属的一家子公司利用无线电射频技术,研制成功一种“车辆固定系统”将射频发射应答器嵌入汽车钥匙中,应答器内存有与特定车辆相吻合的特别识别码。
can总线保护电路设计

can总线保护电路设计一、引言CAN(Controller Area Network)总线是一种常用于工业控制系统中的通信协议,具有高可靠性和抗干扰能力。
为了确保CAN总线的稳定运行,需要设计合适的保护电路,以防止电气干扰和过电压等问题对CAN总线的影响。
二、CAN总线保护电路设计原理1. 电气干扰保护:CAN总线的电气特性要求在传输线路上加入终端电阻和衰减电容,以提高信号的抗干扰能力。
此外,还可以采用差分信号传输,通过两根相反极性的传输线来抵消干扰。
2. 过电压保护:CAN总线在工作过程中可能会受到来自外部的过电压干扰,为了保护CAN节点不受到损坏,可以采用过电压保护电路。
常用的过电压保护元件包括稳压二极管、TVS二极管等,它们能够将过电压引导到地,保护CAN节点。
3. 瞬态保护:CAN总线在工作时会受到来自突发电磁干扰等的瞬态信号,为了防止这些瞬态信号对CAN节点的影响,可以采用瞬态电压抑制器(TVS)等元件,将瞬态信号引导到地。
三、CAN总线保护电路设计方法1. 选择合适的保护元件:根据CAN总线的特性和工作环境,选择合适的保护元件,如稳压二极管、TVS二极管等。
可以根据CAN 总线的工作电压和速率来确定保护元件的额定电压和响应时间。
2. 接地设计:良好的接地设计对于CAN总线的保护至关重要。
应确保保护电路的接地与CAN总线的接地点相连,且接地电阻要尽量小,以确保信号的稳定传输。
3. 布线设计:CAN总线的布线要避免与高功率电源线和高频干扰源(如电机、继电器等)相交,以减少电磁干扰。
同时,布线时要保持线路的匹配阻抗,避免信号的反射和衰减。
4. 终端电阻设计:CAN总线的终端电阻对于信号的传输和抗干扰能力起着重要作用。
终端电阻的阻值应与总线特性阻抗匹配,并根据总线的长度和传输速率来确定。
5. 差分信号设计:差分信号传输可以降低电磁干扰对CAN总线的影响。
在布线时,应确保CAN总线的两根传输线长度相等,并采用相反极性的传输线,以实现差分信号传输。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
汽车总线CAN BUS的保护设计详解
近年来人们对车身舒适性,安全性及信息娱乐性的智能化高度要求,汽车电子也持续的高速发展着,目前车用电子所占比汽车成本约为40%~60%,各种的车身电子控制系统和车载电子控制装置持续的引入汽车设计架构中,包含各式的传感器模块单元,如温度,轮速,转角和加速度等传感器,搭载着电动辅助转向和电子式驻煞车系统,不断满足我们驾驶员和乘客的舒适乘坐和安全需求。
而在这些为数众多的车用电子系统之间,车用控制器局域网络接口(CAN Bus)由于采用双线串接拓朴架构,可串接或并接任意节点装置,不仅使布线及维护的复杂度大幅降低,并可一并降低线材及布线成本,因此成为首选的车用系统传输接口。
CAN Bus传输接口所采用的双线差动(Two wire differential)传输技术,若某条差动讯号线因为断线或接地故障而无法传输讯号,仍然能转换为单线讯号传输模式,因此可大大减低车内系统通讯沟通不良的机率,不仅提升了车身功能的稳定度,其差动双绞线的连接方式也具有抗共模电磁干扰能力。
此外CAN Bus是以多主机的架构型态传送接收讯号,每个主机均能主动发出通讯指向特定节点,因此能够保持在线最大空间状态来应付巨大数据量的传送接收,不仅丰富了车身功能,若有任一主机节点故障时亦不受影响,可确保驾驶人的行车体验,减少故障维修的风险。
CAN Bus的传输速度可以有不同的选择,目前应用最高需求至1Mbps,且其传输距离最远可达1000M,因此可满足应用于车内不同子系统对不同传输速度和传输距离的要求,因而在开发阶段时的成本,车体重量,规格特性上的诸多考虑下,CAN Bus接口皆能满足以上需求,以致现阶段约有70%的汽车皆已采用CAN Bus昨为其传输界面使用。
而作为频繁和人体接触的汽车环境,静电放电事件(ESD),电气过载事件(EOS),以及电性快速瞬时事件(EFT)会经常出现在汽车运行过程中,这对于行驶中的汽车是一个潜在的威胁,而CAN收发芯片在设计时会考虑一些静电的抗扰,但级别远远达不到系统级测试的要求,故对于CAN通信接口的保护设计变得非常重要。