基于Arduino的舵机控制系统设计
舵机方案_精品文档

1. 引言舵机是一种常用的电子器件,用于控制物理装置的运动。
它通过接收控制信号来精确控制舵机的运动角度和速度。
舵机方案的设计涉及到硬件选型、软件编程以及系统的集成等多个方面。
本文将探讨舵机方案的设计考虑因素、选型指南以及面临的常见挑战,并给出一种基于Arduino平台的舵机控制方案。
2. 设计考虑因素在设计舵机方案时,需要考虑以下几个因素:2.1 动力需求首先需要确定所需的动力输出,即舵机需要承载的负载和机械结构。
根据负载的重量、运动范围和速度要求,选择合适的舵机类型和规格。
2.2 控制方式舵机的控制方式主要有PWM控制和串行通信控制两种。
根据系统的需求和控制器的能力,选择合适的控制方式。
2.3 速度和精度要求根据项目的需求和运动控制的准确性要求,选择具有合适速度和精度的舵机。
一般来说,速度和精度越高的舵机成本越高。
2.4 可靠性要求如果项目对舵机的可靠性有较高的要求,需要选择可信赖的品牌和型号,并考虑备件可用性和维修支持等因素。
3. 舵机选型指南在选型舵机时,可以根据以下几个因素进行考虑:3.1 扭矩扭矩是指舵机产生转矩的能力,通常以N·cm或kg·cm为单位。
根据负载的需求,选择具有足够扭矩的舵机。
3.2 转角转角是指舵机能够旋转的角度范围。
根据所需运动范围,选择具备合适转角的舵机。
3.3 速度舵机的速度是指其旋转或摆动的快慢程度。
速度一般以秒/60°或秒/90°来表示,根据项目需要选择合适的速度。
3.4 供电电压舵机的工作电压通常在4.8V到7.2V之间,根据控制器和电源系统的匹配,选择适合的供电电压。
4. Arduino舵机控制方案Arduino是一种开源的硬件平台,具有广泛的应用和良好的生态系统支持。
以下是一个基于Arduino的舵机控制方案示例:4.1 硬件设计首先,选择与Arduino兼容的舵机驱动器,例如常用的L293D或L298N芯片。
连接电源和信号线,确保舵机可靠供电并与控制器正确连接。
基于Arduino的智能家居控制系统设计与实施

基于Arduino的智能家居控制系统设计与实施智能家居控制系统是一种利用现代信息技术,通过对家庭设备进行智能化管理和控制的系统。
随着物联网技术的不断发展,智能家居控制系统已经成为人们生活中不可或缺的一部分。
本文将介绍基于Arduino的智能家居控制系统的设计与实施,包括系统架构设计、硬件选型、软件开发等方面的内容。
一、系统架构设计智能家居控制系统的核心是通过传感器采集环境信息,通过执行器对家庭设备进行控制。
基于Arduino的智能家居控制系统通常包括以下几个模块:传感器模块:用于采集环境信息,如温度、湿度、光照等。
执行器模块:用于对家庭设备进行控制,如灯光、空调、窗帘等。
控制中心:负责接收传感器数据,根据预设规则控制执行器的工作。
用户界面:提供给用户操作界面,可以通过手机App或Web页面进行远程控制。
在系统架构设计中,需要考虑传感器与执行器之间的通信方式、控制中心的逻辑处理能力以及用户界面的友好性和实用性。
二、硬件选型在选择硬件时,需要考虑到系统的稳定性、扩展性和成本等因素。
基于Arduino的智能家居控制系统通常选择以下硬件组件:Arduino主控板:作为系统的核心控制单元,负责接收传感器数据和控制执行器。
传感器模块:根据需求选择温湿度传感器、光敏传感器等。
执行器模块:选择适配Arduino的继电器模块、舵机等。
通信模块:可选用Wi-Fi模块或蓝牙模块,实现与用户界面的通信。
硬件选型需要根据实际需求和预算来进行合理选择,保证系统性能和稳定性。
三、软件开发在软件开发阶段,需要编写Arduino主控板上的程序以及用户界面的应用程序。
Arduino主控板上的程序主要包括传感器数据采集和执行器控制两部分:示例代码star:编程语言:arduinovoid setup() {// 初始化传感器模块}void loop() {// 读取传感器数据// 根据数据控制执行器}示例代码end用户界面的应用程序可以使用App Inventor等工具进行开发,实现远程监控和控制功能。
Arduino入门到精通例程18-舵机控制
Arduino入门到精通例程18-舵机控制舵机控制实验舵机是一种位置伺服的驱动器,主要是由外壳、电路板、无核心马达、齿轮与位置检测器所构成。
其工作原理是由接收机或者单片机发出信号给舵机,其内部有一个基准电路,产生周期为20m,宽度为1.5m的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。
经由电路板上的IC判断转动方向,再驱动无核心马达开始转动,透过减速齿轮将动力传至摆臂,同时由位置检测器送回信号,判断是否已经到达定位。
适用于那些需要角度不断变化并可以保持的控制系统。
当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
一般舵机旋转的角度范围是0度到180度。
舵机有很多规格,但所有的舵机都有外接三根线,分别用棕、红、橙三种颜色进行区分,由于舵机品牌不同,颜色也会有所差异,棕色为接地线,红色为电源正极线,橙色为信号线。
舵机的转动的角度是通过调节PWM(脉冲宽度调制)信号的占空比来实现的,标准PWM(脉冲宽度调制)信号的周期固定为20m(50Hz),理论上脉宽分布应在1m到2m之间,但是,事实上脉宽可由0.5m到2.5m之间,脉宽和舵机的转角0°~180°相对应。
有一点值得注意的地方,由于舵机牌子不同,对于同一信号,不同牌子的舵机旋转的角度也会有所不同。
了解了基础知识以后我们就可以来学习控制一个舵机了,本实验所需要的元器件很少只需要舵机一个、跳线一扎就可以了。
RB—412舵机某1面包板跳线某1扎用Arduino控制舵机的方法有两种,一种是通过Arduino的普通数字传感器接口产生占空比不同的方波,模拟产生PWM信号进行舵机定位,第二种是直接利用Arduino自带的Servo函数进行舵机的控制,这种控制方法的优点在于程序编写,缺点是只能控制2路舵机,因为Arduino自带函数只能利用数字9、10接口。
Arduino的驱动能力有限,所以当需要控制1个以上的舵机时需要外接电源。
arduino控制舵机程序
arduino控制舵机程序第一章:引言随着科技的发展,舵机作为一种常见的传感器设备,广泛应用于机器人控制、航模模型等领域。
舵机可以通过控制信号的输入来实现角度的控制,具有定位精度高、响应速度快等特点。
然而,传统的舵机控制方式存在一定的局限性,例如控制精度不够高、功能扩展能力较弱等问题。
为此,本论文借助Arduino开发板,研究了一种基于Arduino控制的舵机程序,旨在提高舵机控制的精度和功能扩展能力。
第二章:相关技术2.1 Arduino开发板Arduino是一款开源的单片机开发平台,具有简单易学的编程语言和丰富的外设接口。
它可以通过编程实现与舵机的通信和控制。
2.2 舵机控制原理舵机的控制主要依靠控制信号的脉冲宽度来实现,通常使用PWM信号传输。
通过改变脉冲的高电平时间,可以改变舵机的角度。
第三章:舵机程序设计3.1 硬件连接将舵机的控制线连接到Arduino开发板的数字输出口,将舵机的电源线接到Arduino开发板的电源供应器上,以确保舵机正常工作。
3.2 编程设计使用Arduino的开发平台进行编程设计,首先进行引入舵机库的操作,然后定义舵机控制信号的引脚。
在主程序中,可以通过调用库函数来实现舵机控制的功能,例如设置舵机角度、使舵机旋转到指定的角度等。
3.3 程序优化为了提高舵机控制的精度和稳定性,可以通过优化程序代码来减小误差和延迟。
例如可以设置适当的控制信号周期、增加控制信号的分辨率等。
第四章:系统实验与结果分析为了验证舵机程序的控制效果,本论文设计了一系列实验。
实验结果表明,基于Arduino的舵机程序能够实现精确的舵机控制,并且具有较好的功能扩展能力。
通过修改程序代码,可以实现多个舵机的同步控制、快速响应等功能。
综上所述,本论文研究了基于Arduino控制的舵机程序。
实验结果表明,该程序能够实现精确的舵机控制,具有较好的功能扩展能力。
未来可以进一步优化程序算法,提高舵机控制的性能。
基于Arduino语音控制室内垃圾分类的系统设计

基于Arduino语音控制室内垃圾分类的系统设计一、系统构成1.硬件部分该系统的硬件部分主要由Arduino开发板、语音识别模块、舵机和垃圾桶组成。
Arduino开发板是整个系统的核心控制器,它负责接收来自语音识别模块的指令,并通过控制舵机来实现垃圾桶的打开和关闭。
语音识别模块是用来识别用户的语音指令的关键部件,它可以通过对声音的分析和处理,将用户的语音指令转换为数字信号,并传输给Arduino开发板。
舵机是用来控制垃圾桶开合的执行部件,它可以根据Arduino开发板的指令,实现垃圾桶的自动开合。
垃圾桶是整个系统的最终执行部件,它可以根据舵机的控制,打开相应的垃圾分类口,实现垃圾分类的功能。
二、系统工作原理1. 用户通过说出指定的语音命令来控制垃圾桶的打开和关闭。
2. 语音识别模块接收用户的语音指令,并将其转换为数字信号。
通过以上工作原理,用户可以通过语音指令实现对垃圾桶的自动控制,从而实现室内垃圾分类的功能。
三、系统特点1. 智能化:该系统采用了语音控制技术,用户可以通过简单的语音指令来控制垃圾桶的打开和关闭,实现了垃圾分类的智能化。
3. 环保性:通过垃圾分类,可以实现对垃圾的有效处理和再利用,从而实现环境保护的目的。
4. 便捷性:用户可以通过语音指令来控制垃圾桶的打开和关闭,无需直接接触垃圾桶,提高了垃圾分类的便捷性和卫生性。
基于Arduino语音控制的室内垃圾分类系统的设计,将带来用户垃圾分类体验的全新升级。
通过智能化、自动化的设计和语音控制技术的加入,该系统将成为未来垃圾分类的重要发展方向,为环境保护和可持续发展做出更大的贡献。
希望这款系统可以尽快投入使用,为人们的生活带来更多便利,为环境保护事业做出更大的贡献。
_基于Arduino的舵机控制系统设计

Computer Knowledge and Technology 电脑知识与技术计算机工程应用技术本栏目责任编辑:梁书第8卷第15期(2012年5月)基于Arduino 的舵机控制系统设计蔡睿妍(大连大学信息工程学院,辽宁大连116622)摘要:舵机是传统的角度控制驱动器,在机器人等领域得到了广泛应用。
传统的舵机主要采用单片机系统驱动控制,但单片机系统对多个舵机同时进行驱动效果并不理想,因此,采用了流行的开源Arduino 控制板,通过输出不同脉宽的信号进行舵机转动角度控制,实验证明,该系统实现了舵机角度控制,满足舵机角度控制精度要求,为舵机的驱动提供了新方式。
关键词:Arduino ;舵机;脉宽信号;角度控制中图分类号:TM383.4文献标识码:A 文章编号:1009-3044(2012)15-3719-03Design of Servo Control System Based on Arduino CAI Rui-yan(Information and Engineering College of Dalian University,Dalian 116622,China)Abstract:The servo is the traditional angle control driver and has been widely used in robot and other fields.In general,servo is driven by microcontroller system,but the driving effect of microcontroller system is not satisfactory for multiple servos.So,the Arduino,an open source control board,is used to output different pulse width signal to control the servo rotation angle,experiment showed that,this system realizes the angle control of servo,meets the requirement of angle control precision and provides a new way to drive servo.Key words:Arduino;servo;pulse width signal;angle control舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
arduino控制多个舵机

arduino控制多个舵机第一章:引言(约200字)随着机器人技术的快速发展,舵机被广泛应用于各种机械臂、无人机和人形机器人等设备中。
舵机可以精确控制机械臂、无人机等设备的运动,使其具有更高的灵活性和精准度。
然而,要控制多个舵机需要解决的问题是如何实现多个舵机的协调运动,以及如何有效地控制多个舵机同时运行。
因此,本论文旨在研究如何利用Arduino控制系统来实现对多个舵机的灵活控制。
第二章:相关技术(约300字)2.1 舵机工作原理舵机是一种将电信号转换成机械运动的设备,通过控制器发送的脉冲信号的宽度来控制舵机的角度,因此,舵机可以根据控制信号的大小精确地控制机械臂的运动。
2.2 Arduino控制系统Arduino是一种便捷灵活、开源的电子原型平台,在机器人领域被广泛应用。
Arduino可以通过编程语言控制舵机的运动,实现对舵机的精确控制。
2.3 舵机控制算法常见的舵机控制算法有位置式控制算法和速度式控制算法。
位置式控制算法通过控制输出的脉冲信号的宽度来精确控制舵机的角度。
速度式控制算法通过计算舵机的角度和时间间隔之间的差值来控制舵机的速度。
第三章:多舵机控制系统设计(约300字)3.1 硬件设计本系统采用Arduino UNO作为控制器,通过串口与计算机进行通信。
同时,根据需要控制的舵机数量选择合适的舵机拓展板,连接多个舵机。
3.2 软件设计通过编程实现Arduino控制系统的功能,首先需要配置串口通信,然后根据需要控制的舵机数量,设置对应的舵机引脚,并编写相应的控制算法来实现对多个舵机的控制。
第四章:实验结果与分析(约200字)4.1 实验设置为了验证本设计的课题的可行性,我们制作了一个机械臂模型,模型上装有多个舵机,利用设计的Arduino控制系统对其进行控制。
4.2 实验结果实验结果表明,通过设计的Arduino控制系统可以实现对多个舵机的精确控制。
舵机的角度能够达到预期的期望值,并且不同舵机之间的协调运动也能够实现。
Arduino控制系统的设计与实现

Arduino控制系统的设计与实现近年来,Arduino控制系统越来越受到科技爱好者的关注。
因为可以定制、灵活、易于开发,Arduino控制系统已被应用于各个领域,如机器人、智能家居、测量控制等。
本文将介绍如何设计和实现一个简单的Arduino控制系统。
1.硬件和软件Arduino控制系统通常由两部分组成:硬件和软件。
硬件是由Arduino微控制器、外设模块(如传感器和执行器)和电路板组成的;软件是由程序代码编写的,其中包括控制算法和用户交互接口。
1.1 硬件Arduino微控制器是这个控制系统的核心。
它由一个Atmel AVR微控制器和一个简单易用的开发环境组成。
Arduino有许多型号,例如Arduino UNO、Arduino Mega和Arduino Nano等。
由于Arduino开源、定制性强和价格便宜,它被广泛应用于各种创新项目中。
除了微控制器,控制系统的硬件还需要选择一些适当的外设模块。
例如,如果需要测量温度和湿度,则需要选择温度传感器和湿度传感器;如果需要控制舵机,则需要选择一个舵机控制板。
常用的模块还包括LED灯、继电器、红外传感器等。
Arduino的电路板通常由一些输入/输出引脚组成。
它们可以连接到外设模块,以实现控制系统的功能。
例如,如果要连接一个温度传感器和一个LED灯,则需要设置输入引脚用于连接传感器,输出引脚用于连接LED灯。
1.2 软件Arduino的编程语言基于Wiring编程语言,它是一种简单易用的C编程语言,可以轻松掌握。
它擅长于处理数字和文本数据,同时还支持操作和控制输入/输出接口。
Arduino的开发环境包括Arduino IDE和Arduino库。
Arduino IDE是一个集成开发环境,可以用于编写、上传和调试程序代码。
Arduino库是一组常用函数库,包括控制模块、通信接口、传感器控制等功能。
在编写Arduino控制系统程序代码时,需要考虑如何实现控制算法和用户交互接口。
arduino入门实践之舵机的控制

arduino⼊门实践之舵机的控制元件:arduino mega 2560、舵机、杜邦线接线:普通舵机有3根线:棕、红、橙(棕⾊连接 GND、红⾊连接 Vcc、橙⾊连接信号 S)原理:舵机的伺服系统由可变宽度的脉冲来进⾏控制,控制线是⽤来传送脉冲的。
脉冲的参数有最⼩值,最⼤值,和频率。
⼀般⽽⾔,舵机的基准信号都是周期为20ms,宽度为1.5ms。
这个基准信号定义的位置为中间位置。
舵机有最⼤转动⾓度,中间位置的定义就是从这个位置到最⼤⾓度与最⼩⾓度的量完全⼀样。
最重要的⼀点是,不同舵机的最⼤转动⾓度可能不相同,但是其中间位置的脉冲宽度是⼀定的,那就是1.5ms。
如下图: ⾓度是由来⾃控制线的持续的脉冲所产⽣。
这种控制⽅法叫做脉冲调制。
脉冲的长短决定舵机转动多⼤⾓度。
例如:1.5毫秒脉冲会到转动到中间位置(对于180°舵机来说,就是90°位置)。
当控制系统发出指令,让舵机移动到某⼀位置,并让他保持这个⾓度,这时外⼒的影响不会让他⾓度产⽣变化,但是这个是由上限的,上限就是他的最⼤扭⼒。
除⾮控制系统不停的发出脉冲稳定舵机的⾓度,舵机的⾓度不会⼀直不变。
当舵机接收到⼀个⼩于1.5ms的脉冲,输出轴会以中间位置为标准,逆时针旋转⼀定⾓度。
接收到的脉冲⼤于1.5ms情况相反。
不同品牌,甚⾄同⼀品牌的不同舵机,都会有不同的最⼤值和最⼩值。
⼀般⽽⾔,最⼩脉冲为1ms,最⼤脉冲为2ms。
如下图:arduino控制舵机的两种⽅法: 1、第⼀种是通过Arduino的普通数字传感器接⼝产⽣占空⽐不同的⽅波,模拟产⽣PWM信号进⾏舵机定位。
2、第⼆种是直接利⽤Arduino⾃带的Servo函数进⾏舵机的控制,这种控制⽅法的优点在于程序编写,缺点是只能控制2路舵机,因为Arduino⾃带函数只能利⽤数字9、10接⼝。
Arduino的驱动能⼒有限,所以当需要控制1个以上的舵机时需要外接电源。
代码:#include<Servo.h>Servo myservo; //建⽴⼀个舵机对象myservoint pos = 0;void setup() {myservo.attach(9); //将引脚9上的舵机与舵机对象连接起来}void loop() {for(pos = 0;pos<180;pos += 1) //若要控制增⼤转动速度,可将1改为更⼤的数值{myservo.write(pos); //写⾓度到舵机delay(15);}for(pos = 180;pos>=1;pos-=1){myservo.write(pos);delay(15);}}。
利用Arduino 驱动舵机(附带程序)
学习利用Arduino 驱动舵机(附带程序)2012-6-30 00:27|发布者: sonxun|查看: 1180|评论: 0摘要: 什么是伺服电机?想象一下有一个小电机连接到一个可调电阻器。
一个电动脉冲或者命令被发送到电机之后,电机旋转到匹配指定的电位值的角度。
嗯,那样说听起来有点难以理解。
一个更简单的解释是:伺服电机,就是一个可 ... 什么是伺服电机?想象一下有一个小电机连接到一个可调电阻器。
一个电动脉冲或者命令被发送到电机之后,电机旋转到匹配指定的电位值的角度。
嗯,那样说听起来有点难以理解。
一个更简单的解释是:伺服电机,就是一个可以被指定旋转到一个特定的角度的电动马达。
例如,它通常可以用来控制遥控汽车的转向系统。
在这里,我们要再次感谢Arduino和朋友们,要使用一个伺服电机是很容易的,它可以让你创造出富有想象力的设计,唯一的局限就只有你的时间和资金了。
当你想要使用伺服电机时,需要考虑一些因素,包括:•旋转范围,指的是电机可以旋转的角度的范围。
例如 180 度或者 360 度(全旋),等等。
•旋转速度(通常以旋转每一度所花费的时间来衡量)。
•扭矩,伺服电机能够产生的扭矩 (旋转的力量)。
•在负载的状态下的电流大小。
•重量、成本以及其他因素。
脑海中首先想到的一个问题就是“哇——我能够同时使用多少个电机呢?”答案是……在duemilanove上,可以使用12个;在arduino mega上,可以使用48 个(哇)。
请注意当你使用伺服电机函数库时,你不能在第9和第10端口上使用analogWrite(); 函数。
你可以在 arduino 伺服电机函数库页面找到更多的细节。
在今天的例子和练习中,我使用了Turnigy TG9伺服电机。
它相当的便宜,而且重量轻,非常适合演示实验,这款电机也经常被用于遥控飞机。
它的旋转范围是180度。
(它真的非常便宜)我希望你注意到伺服电机上一共有三根导线。
一根是 +5V 电源,一根是 GND 接地,另一根是控制信号——连接到arduino的一个数字输出端口上。
arduino 多个舵机控制
arduino 多个舵机控制章节一:引言在现代科技领域中,越来越多的项目需要使用到舵机来实现精确的运动控制。
然而,传统的舵机控制方法往往只能控制一个舵机的运动,而当需要控制多个舵机同时运动时,往往会面临诸多问题。
为了解决这一难题,本文将介绍如何通过Arduino 控制多个舵机的运动,从而实现对多个舵机的精确控制。
章节二:舵机控制基础在介绍多舵机控制之前,首先需要了解舵机的基础知识。
舵机是一种用于控制机械装置运动的电机,它具有位置反馈和角度控制功能。
舵机通常由一个电机、一个控制电路和一个反馈装置构成。
舵机通过电路中的脉冲宽度调制(PWM)信号来控制舵机的角度,通常使用50Hz的PWM信号,脉冲宽度的变化范围可决定舵机的角度范围。
章节三:多舵机控制方案设计本文采用的多舵机控制方案是使用Arduino来实现,因为Arduino具有开源、易使用和丰富的资源的特点。
在实际应用中,为了同时控制多个舵机,我们需要使用到一种称为舵机驱动板(Servo Driver Board)的外部硬件模块。
舵机驱动板通过I2C总线与Arduino连接,可以同时控制多个舵机的运动。
章节四:实验与结果分析在实际实验中,我们使用了Arduino UNO、舵机驱动板和四个舵机。
通过编写Arduino程序,我们可以通过I2C总线将多个舵机连接到舵机驱动板上,然后通过在程序中指定舵机的编号和对应的角度,来控制多个舵机的运动。
在实验过程中,我们可以观察到每个舵机的运动是否符合预期,从而验证我们的多舵机控制方案的有效性。
总结:本文介绍了如何利用Arduino实现对多个舵机的控制,通过使用舵机驱动板和编写相应的Arduino程序,我们可以实现对多个舵机的精确控制。
通过实验和结果分析,我们可以验证多舵机控制方案的有效性和实用性。
未来,可以进一步研究舵机控制方案的优化和应用扩展,在更广泛的领域中提供更多的可能性。
章节三:多舵机控制方案设计本文采用的多舵机控制方案是使用Arduino来实现,因为Arduino具有开源、易使用和丰富的资源的特点。
基于Arduino的智能家居控制系统设计与搭建

基于Arduino的智能家居控制系统设计与搭建智能家居控制系统是一种通过智能化技术,实现对家居设备和设施进行远程控制和自动化管理的系统。
随着物联网技术的不断发展,越来越多的人开始关注智能家居系统的设计与搭建。
本文将介绍基于Arduino的智能家居控制系统的设计原理、硬件组成、软件编程以及实际搭建过程,帮助读者了解如何打造一个简单而实用的智能家居系统。
一、智能家居控制系统设计原理智能家居控制系统的设计原理主要包括传感器采集、数据处理、决策控制和执行操作四个基本环节。
传感器采集环节负责采集环境信息,如温度、湿度、光照等;数据处理环节对采集到的数据进行处理和分析;决策控制环节根据数据分析结果做出相应决策;执行操作环节则是将决策结果转化为具体操作指令,控制家居设备的开关状态。
二、智能家居控制系统硬件组成基于Arduino的智能家居控制系统通常包括Arduino主控板、各类传感器(如温湿度传感器、光敏传感器等)、执行模块(如继电器模块、舵机模块等)以及无线通信模块(如Wi-Fi模块、蓝牙模块等)。
这些硬件组件共同构成了一个完整的智能家居控制系统。
三、智能家居控制系统软件编程在软件编程方面,Arduino平台通常使用C/C++语言进行编程。
通过Arduino IDE(集成开发环境)编写程序代码,实现传感器数据采集、数据处理和决策控制逻辑。
同时,利用Arduino提供的丰富库函数和示例代码,可以快速实现各种功能模块的开发和调试。
四、智能家居控制系统搭建过程准备工作:首先准备好所需的硬件组件,包括Arduino主控板、各类传感器和执行模块。
连接硬件:按照电路连接图将各个硬件组件连接到Arduino主控板上,确保连接正确可靠。
编写程序:使用Arduino IDE编写程序代码,实现传感器数据采集和基本控制逻辑。
上传程序:将编写好的程序代码上传到Arduino主控板中,进行调试和测试。
手机App开发:如有需要,可以开发手机App与Arduino进行通信,实现远程控制功能。
arduino 控制舵机

arduino 控制舵机章节一:引言 (大约250字)本论文旨在介绍如何使用Arduino控制舵机,这在机器人技术、自动化领域以及其他各种应用中具有重要作用。
舵机是一种能够精确控制角度的设备,通常用于控制机器人的各个部件,如机械臂、摄像头等。
Arduino是一种开源电子平台,提供了简单、易用的方式来控制各种外围设备。
本文将介绍如何使用Arduino进行舵机控制,并给出了一些实例来演示其应用。
章节二:舵机的控制机制 (大约250字)舵机通过控制脉冲宽度调制(PWM)信号来实现角度控制。
通常情况下,舵机接收一个20ms的周期信号,其中高电平部分的宽度决定了舵机的位置。
通过改变高电平部分的宽度,我们可以控制舵机的角度。
Arduino通过PWM输出引脚来实现这个功能。
我们可以使用Arduino的analogWrite()函数来生成PWM信号,并将舵机连接到相应的引脚上。
章节三:Arduino控制舵机的实现 (大约250字)在Arduino中,我们可以使用Servo库来控制舵机。
首先,我们需要引入Servo库并创建一个Servo对象。
然后,我们可以使用attach()函数将舵机连接到一个特定的引脚上。
接下来,我们可以使用write()函数来设置舵机的角度。
通过不断改变角度值,我们可以控制舵机的运动。
最后,我们可以使用detach()函数将舵机从引脚上解除连接。
本文将给出一个简单的示例程序,展示如何使用Arduino控制舵机。
我们将创建一个简单的舵机摆动程序,让舵机在两个预定的角度之间来回摆动。
章节四:实验结果与讨论 (大约250字)我们将使用Arduino Uno开发板和一个舵机来进行实验。
通过运行我们编写的程序,我们成功地将舵机连接到Arduino,并实现了一个简单的舵机摆动功能。
我们通过改变角度值和摆动的时间间隔,观察到了舵机运动的不同效果。
总之,本文介绍了如何使用Arduino控制舵机,并给出了一个简单的示例程序。
舵机扑翼arduino代码

舵机扑翼Arduino代码简介舵机扑翼是一种机械装置,模仿鸟类或昆虫的翅膀扇动的动作。
通过使用Arduino 控制舵机的旋转角度和速度,我们可以实现一个模拟飞行的机器人。
本文将详细介绍关于舵机扑翼的Arduino代码,包括如何连接舵机到Arduino、编写舵机控制代码,并提供一个简单的实例来演示代码的工作原理。
材料清单在开始编写代码之前,我们需要准备以下材料: - Arduino开发板 - 一个舵机 - 杜邦线(若干)连接舵机到Arduino首先,我们需要将舵机连接到Arduino开发板上。
舵机通常具有三个引脚:地(GND)、电源(VCC)和控制信号(信号)。
1.将舵机的地引脚连接到Arduino的地引脚。
2.将舵机的电源引脚连接到Arduino的5V引脚。
3.将舵机的控制信号引脚连接到Arduino的数字引脚。
确保引脚连接正确,然后我们可以开始编写代码。
编写舵机控制代码在Arduino中,我们可以使用Servo库来控制舵机。
首先,我们需要在代码中包含Servo库。
#include <Servo.h>接下来,我们需要定义一个舵机对象,并指定控制信号引脚。
Servo myServo;void setup() {myServo.attach(9); // 将舵机控制信号引脚连接到Arduino的数字引脚 9}在setup()函数中,我们使用attach()函数将舵机的控制信号引脚连接到Arduino的数字引脚,在本例中我们连接到数字引脚 9。
现在,我们可以编写一个简单的函数来控制舵机的旋转角度。
void flapWings() {myServo.write(0); // 将舵机旋转到 0 度位置,扇动向下delay(1000); // 等待 1 秒myServo.write(90); // 将舵机旋转到 90 度位置,扇动向上delay(1000); // 等待 1 秒}在flapWings()函数中,我们使用write()函数将舵机旋转到指定的角度。
基于Arduino的智能家居控制系统设计

基于Arduino的智能家居控制系统设计智能家居是一种通过多种技术手段将普通家居转变为智能化、自动化的家居系统。
它利用传感器、通信技术和控制设备,通过集中控制中心实现各种家居设备的自动化操作和远程控制。
基于Arduino的智能家居控制系统是一种基于Arduino平台设计和制作的智能家居系统。
Arduino是一种开源硬件平台,它具有简单易用、成本低廉、功能强大的特点,适合用于设计和制作各种智能化的原型设备和系统。
通过结合Arduino的强大功能和丰富的扩展模块,可以实现基于Arduino的智能家居控制系统的设计。
基于Arduino的智能家居控制系统设计的目的是实现对家居设备的远程控制和自动化操作。
通过手机App或者电脑等终端设备,用户可以方便地远程控制家中的灯光、电器、窗帘等各种设备,实现自动化的家居管理。
下面将详细介绍基于Arduino的智能家居控制系统的设计和实现过程。
首先,我们需要一个Arduino主控板作为系统的核心。
Arduino主控板可以通过串口与各种传感器、执行器等外围设备进行通信。
根据实际需求,选择合适的Arduino型号,例如Arduino Uno、Arduino Nano等。
其次,我们需要将各种传感器和执行器与Arduino主控板相连,以实现对家居设备的感知和控制。
例如,可以使用光敏电阻传感器来感知光照强度,温湿度传感器来感知室内温湿度,红外传感器来感知人体活动等。
对于需要远程控制的设备,如灯光、电器等,可以使用继电器模块或者电子继电器来实现对其开关的控制。
接着,我们需要设计一个人机交互界面,以实现用户与智能家居系统之间的交互操作。
可以通过开发一个手机App或者搭建一个Web页面的形式,将各种功能模块以图形化的方式展示给用户。
用户可以通过该界面实现对家居设备的遥控和管理。
需要注意的是,界面设计应该简洁明了,操作便捷友好,方便用户使用。
在系统设计时,我们还需要考虑到安全性和稳定性的问题。
舵机控制电路

舵机控制电路舵机控制电路引言:随着科技的进步和发展,舵机在自动化控制领域的应用越来越广泛。
舵机是一种能够控制角度的驱动器,常用于模型飞机、机器人和其他自动化设备中。
为了实现对舵机的精确控制,舵机控制电路的设计变得至关重要。
本文将介绍舵机控制电路的基本原理和设计方法。
第一章舵机的工作原理舵机是一种电力执行器,其工作原理基于电机和位置反馈装置的组合。
电机通过旋转传动装置使输出轴产生运动。
位置反馈装置检测输出轴的实际位置,并将其与期望位置进行比较,从而控制电机的转动。
舵机的控制信号通常是一个PWM信号,它的脉冲宽度决定了输出轴的位置。
第二章舵机控制电路的设计要点舵机控制电路的设计需要考虑多个因素。
首先,需要确定舵机的工作电压范围,以选择合适的电源。
其次,需要选择合适的控制信号源,通常使用微控制器或单片机来生成PWM信号。
在生成PWM信号时,需要考虑脉冲宽度与输出轴位置之间的关系,并设置适当的频率。
此外,为了确保舵机的稳定性和精确控制,还需要添加滤波电路和校准电路。
第三章舵机控制电路的设计案例设计一个舵机控制电路的实际案例将有助于进一步理解舵机控制电路的设计过程。
假设我们需要控制一个舵机的角度范围在0到180度之间,工作电压范围为5V至7.4V。
我们选择一个基于Arduino的微控制器来生成PWM信号。
通过编程,可以设置PWM信号的脉冲宽度与所需角度之间的映射关系。
为了提高控制的精确度,我们还可以根据实际情况对舵机进行校准。
第四章舵机控制电路的应用前景舵机控制电路在模型飞机、机器人和其他自动化设备中的应用前景广泛。
随着技术的不断进步,舵机控制电路的设计将变得更加先进和复杂。
在未来,可以预见舵机控制电路将结合传感器技术和人工智能算法,实现更高级别的自动化控制。
结论舵机控制电路是实现对舵机精确控制的重要组成部分。
通过设计合理的控制电路,可以实现对舵机在指定角度范围内的精确控制。
未来,舵机控制电路将在自动化控制领域发挥越来越重要的作用。
arduino机械 控制舵机正反转

arduino 控制舵机正反转Chapter 1: IntroductionIntroduction:The aim of this thesis is to explore the implementation of Arduino in controlling the rotation direction of a servo motor. Arduino is an open-source electronic platform that allows users to create interactive projects. Servo motors are widely used in various applications such as robotics, automation, and model making due to their precise control over rotational motion. This paper will discuss the principles behind servo motor control, the electrical setup required, and the programming techniques used for controlling servo motor rotation direction.Chapter 2: Servo Motor Control Principles2.1 Working Principle of Servo Motors:A servo motor is a closed-loop feedback control system that converts an electrical signal into rotational motion. It consists of a motor, a position sensor (usually a potentiometer), and a control circuit. The control circuit compares the desired position with the actual position of the motor shaft and adjusts its rotation accordingly.2.2 Controlling Servo Motor Direction:The direction of a servo motor's rotation is controlled by the polarity of the electrical signal supplied to it. By reversing the polarity, the servo motor can be made to rotate in the opposite direction. Arduino can generate these electrical signals using its pulse-width modulation (PWM) pins. By varying the pulse width,the servo motor can be controlled to rotate at different angles and speeds.Chapter 3: Electrical Setup3.1 Hardware Requirements:To control the direction of a servo motor using Arduino, the following components are required:- Arduino board- Servo motor- Jumper wires- Power supply (usually 5V)3.2 Wiring Connections:The servo motor is connected to the Arduino board as follows: - Connect the servo motor's positive pin to the Arduino's 5V pin - Connect the servo motor's ground pin to the Arduino's GND pin - Connect the servo motor's control pin to one of the Arduino's PWM pins (e.g., pin 9)Chapter 4: Arduino Programming Techniques4.1 Arduino Library for Servo Motor Control:Arduino provides a built-in servo library that simplifies the programming of servo motor control. This library provides functions such as attach(), write(), and writeMicroseconds() to control the servo motor's rotation angle.4.2 Code Example: Controlling Servo Motor Direction:To control the direction of the servo motor using Arduino, thefollowing code snippet can be used:#include <Servo.h>Servo myServo;void setup() {myServo.attach(9); // Attaches the servo to pin 9}void loop() {// Rotate the servo clockwisemyServo.write(0); // Set the angle to 0 degreesdelay(2000); // Wait for 2 seconds// Rotate the servo counterclockwisemyServo.write(180); // Set the angle to 180 degreesdelay(2000); // Wait for 2 seconds}Conclusion:In this thesis, we have discussed the principles behind servo motor control and demonstrated how Arduino can be used to control the rotation direction of a servo motor. By leveraging Arduino's PWM pins and servo library, users can easily program the servo motor to rotate clockwise and counterclockwise. The electrical setup requires the proper wiring connections between the servo motor and Arduino, along with an appropriate power supply. Overall,Arduino provides a versatile and accessible platform for controlling servo motor rotation direction.Chapter 5: Challenges and Limitations5.1 Power Supply:One challenge in controlling servo motor direction is ensuring a stable and adequate power supply. Servo motors typically require a separate power source, as they can draw a substantial amount of current. It is important to provide a steady and sufficient power supply to avoid fluctuations or voltage drops that may affect the motor's performance or cause it to malfunction.5.2 Mechanical Constraints:The direction of rotation in a servo motor is also influenced by its mechanical setup. Some servo motors have limited rotation angles, typically 180 degrees or 360 degrees. The servo motor's physical structure and design may impose constraints on the possible rotation directions, limiting the range of motion or requiring additional mechanical adjustments.5.3 Accuracy and Precision:Controlling the direction of rotation in a servo motor requires precise and accurate control signals. The position sensor in the motor provides feedback to the control circuit, enabling it to adjust the motor's rotation accordingly. However, there may be limitations in the accuracy and precision of the position sensor, leading to slight errors or inaccuracies in the motor's actual rotation direction.Chapter 6: Applications of Servo Motor Control6.1 Robotics:Servo motors are widely used in robotics for controlling joint movements. By accurately controlling the rotation direction of each servo motor, robots can perform various tasks with dexterity and precision. For example, robotic arms can be controlled to pick and place objects, while humanoid robots can simulate human-like movements.6.2 Automation:Servo motors play a crucial role in automation systems, where precise control over motion is necessary. They are used in conveyor systems, CNC machines, and industrial assembly lines to control the movement of components or tools. By controlling the rotation direction of servo motors, automation systems can achieve efficient and accurate motion control.6.3 Model Making:In the field of model making, servo motors are extensively used to control the movement of model vehicles, aircraft, and ships. By programming the servo motors to rotate in different directions, model makers can create realistic and interactive models. For example, in an RC car, servo motors control the steering mechanism.Conclusion:Controlling the rotation direction of a servo motor using Arduino provides a versatile and accessible platform for various applications. By leveraging Arduino's PWM pins and servo library,users can easily program the servo motor to rotate clockwise or counterclockwise. However, challenges such as power supply requirements, mechanical constraints, and accuracy limitations need to be considered. Despite these challenges, servo motor control finds applications in robotics, automation, and model making, enabling precise and controlled motion. With further advancements in technology and improvements in servo motor designs, the implementation of Arduino in controlling servo motor direction will only become more efficient and effective.。
Arduino扩展板使用之舵机篇
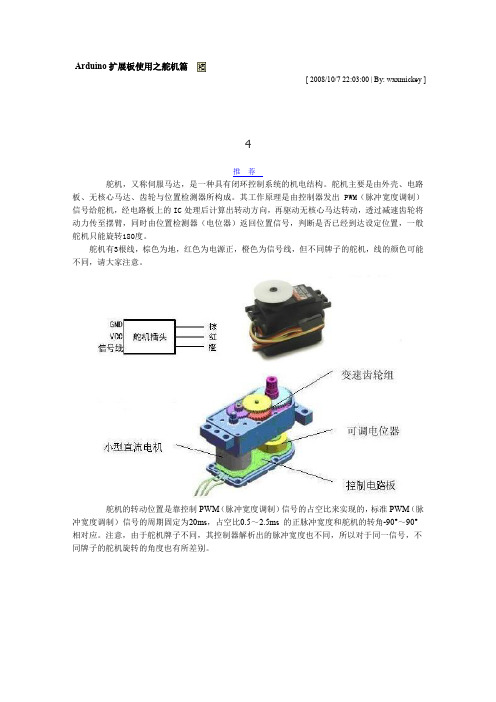
Arduino 0012-0016版本的 IDE 内会自带一个舵机库文件,不过该库文件只能使 Pin9和 Pin10控制 舵机,如舵机连接到 Pin9上:
演示代码:
#i nclude <Servo.h>
Servo myservo; // 定义舵机对象,
int pos = 0;
void setup()
break;
case 'a':
//如果数据后带 a,则表示是 servo1的数据,比如串口发送85a
servo1.write(v);
v = 0;
break;
case 'b':
//如果数据后带 b,则表示是 servo2的数据,比如串口发送90b
servo2.write(v);
v = 0;
break;
B:数字扩展口,插针定义从上至下为:数字 IO 口,5V,地(符合舵机线序)。 C:串口选择跳线,当需要使用 RS485功能时,3个短路帽插到上面;当需要使用 APC220无 线数传时,3个短路帽插到下面;当需要下载程序时,请拔掉短路帽。 D:RS485串口接口,C 串口选择跳3个短路帽插到上面时有效。 E:模拟扩展口,插针定义从上至下为:5V,地,数字 IO 口(符合 GP2D12线序)。 F:复位按钮。 G:5个 VIN 电源口,与 Arduino 的 VIN 相通。 H:电源指示灯。 I:APC220无线数传接口,C 串口选择跳3个短路帽插到下面时有效。 J:6个 PWM 接口,将数字口上的6个 PWM 单独引出来,插针定义从上至下为:PWM,地, 5V。 K:大电流器件独立电源接口,当接入电源时,请拔掉 A 跳线短路帽。
aduino按键控制舵机

aduino按键控制舵机一、引言Arduino 是一种开源的电子平台,它以简洁的编程语言和易用的开发工具,被广泛应用于各种创意项目和原型制作中。
舵机是一种能够控制角度的电动装置,可实现精确的运动控制。
本论文旨在研究如何使用 Arduino 板和按键来控制舵机的运动。
二、原理1. Arduino 板和舵机的连接通过连接杜邦线,将舵机的地线连接至 Arduino 板的 GND (地)脚。
然后,将舵机的电源线连接至 Arduino 板的 5V (电源)脚。
最后,将舵机的控制线连接至 Arduino 板的数字引脚。
2. 按键的接口设置将按键的引脚接入 Arduino 板的数字引脚,并设置相应的引脚为输入模式。
3. 舵机的控制原理舵机通过控制信号的脉冲宽度来控制角度位置。
当脉冲宽度为0时,舵机转到最左边的位置;当脉冲宽度为180时,舵机转到最右边的位置。
在 Arduino 编程中,可以使用 Servo 库来控制舵机的转动。
三、方法1. 初始化程序在 Arduino IDE 中编写程序,导入 Servo 库并定义控制舵机的引脚。
2. 编写按键控制程序通过使用 digitalRead() 函数来读取按键的状态,当按键按下时,控制舵机转动到指定角度。
3. 编译和上传程序将编写好的程序通过 USB 线连接 Arduino 板,并编译上传到Arduino 板上运行。
四、实验结果与分析通过实验可以发现,按键控制舵机的运动是很简单且精确的。
当按键按下时,舵机会转动到相应的角度位置;当按键松开时,舵机保持在当前角度位置。
这种按键控制舵机的方式可以应用于很多实际场景中,如机械臂、门禁系统等。
实验中还可以根据需求进一步优化程序,例如添加限位功能,防止舵机过度转动,并通过串口打印当前舵机角度,方便进行调试和监控。
总结:本实验成功实现了使用 Arduino 板和按键来控制舵机的目标。
通过按键可以精确地控制舵机的转动,实现了精准的角度控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Computer Knowledge and Technology 电脑知识与技术计算机工程应用技术本栏目责任编辑:梁书第8卷第15期(2012年5月)基于Arduino 的舵机控制系统设计蔡睿妍(大连大学信息工程学院,辽宁大连116622)摘要:舵机是传统的角度控制驱动器,在机器人等领域得到了广泛应用。
传统的舵机主要采用单片机系统驱动控制,但单片机系统对多个舵机同时进行驱动效果并不理想,因此,采用了流行的开源Arduino 控制板,通过输出不同脉宽的信号进行舵机转动角度控制,实验证明,该系统实现了舵机角度控制,满足舵机角度控制精度要求,为舵机的驱动提供了新方式。
关键词:Arduino ;舵机;脉宽信号;角度控制中图分类号:TM383.4文献标识码:A 文章编号:1009-3044(2012)15-3719-03Design of Servo Control System Based on Arduino CAI Rui-yan(Information and Engineering College of Dalian University,Dalian 116622,China)Abstract:The servo is the traditional angle control driver and has been widely used in robot and other fields.In general,servo is driven by microcontroller system,but the driving effect of microcontroller system is not satisfactory for multiple servos.So,the Arduino,an open source control board,is used to output different pulse width signal to control the servo rotation angle,experiment showed that,this system realizes the angle control of servo,meets the requirement of angle control precision and provides a new way to drive servo.Key words:Arduino;servo;pulse width signal;angle control舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。
目前,在高档遥控玩具,如飞机、潜艇模型,遥控机器人中已经得到了普遍应用。
传统对舵机的控制主要采用单片机,利用定时器和中断的方式来完成控制,这样的方式控制一个舵机还是相当有效的,但是随着舵机数量的增加,控制起来就没有那么方便了,尤其对机器人等需要多个舵机同时工作的系统中,单片机驱动复杂且精度难以保证。
因此,本文采用目前较为流行的开源Arduino 来实现舵机的精确控制。
1Arduino 简介Arduino 是源自意大利的一个教学用开源硬件项目,主要是为希望尝试创建交互式物理对象的实践者、喜欢创造发明的人及艺术家所构建的,它秉承开源硬件思想,程序开发接口免费下载,也可依需求自己修改。
Arduino 引脚如图1所示:图1Arduino 控制板其硬件系统是高度模块化的,通过USB 接口与计算机连接,包括14通道数字输入/输出,其中包括6通道PWM 输出、6通道10位ADC 模拟输入/输出通道,电源电压主要有5V 和3.3V [1]。
在核心控制板的外围,有开关量输入输出模块、各种模拟量传感器输入模块、总线类传感器的输入模块,还有网络通信模块,只要在核心控制板上增加网络控制模块,就可以容易地与互联网连接。
Arduino 还提供了自己的开发语言[2,3],支持Windows 、Linux 、MacOS 等主流的操作系统。
Arduino 系统是基于单片机开发的,并且大量应用通用和标准的电子元器件,包括硬件和软件在内的整个设计,代码均采用开源方式发布,因此采购的成本较低,在各种电子制作竞赛、收稿日期:2012-04-23作者简介:蔡睿妍(1979-),黑龙江林甸县人,讲师,硕士,主要从事电子技术、通信与网络方向的研究。
E-mail:kfyj@ Tel:+86-551-56909635690964ISSN 1009-3044Computer Knowledge and Technology 电脑知识与技术Vol.8,No.15,May 2012.3719Computer Knowledge and Technology 电脑知识与技术计算机工程应用技术本栏目责任编辑:梁书第8卷第15期(2012年5月)电子艺术品创意设计等越来越多地使用Arduino 作为开发平台。
甚至可以接受Macromedia Flash 软件制作的动画发送的信号,并由此来控制一些动作器件(如舵机等)。
2舵机的工作原理舵机是一种位置伺服的驱动器,具有闭环控制系统的机电结构,由小型直流电机、变速齿轮组、可调电位器、控制板等部件组成[4],如图2所示。
由于可以方便地控制舵机旋转的角度(舵角,但是舵角一般不超过180°),因此,舵机在要求角度不断变化的控制系统中得到了广泛应用。
图2舵机组成结构舵机在工作中,控制器发出脉冲宽度调制(PWM )信号给舵机,获得直流偏置电压。
舵机内部有一个基准电路,产生周期为20ms ,宽度为1.5ms 的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出到电机驱动芯片,驱动芯片根据电压差的正负控制电机的正反转。
舵机转动的角度是通过调节PWM 信号的占空比来实现的,标准PWM 信号的周期固定为20ms ,理论上脉宽(脉冲的高电平部分)范围在1ms~2ms 之间,但实际上脉宽可以在0.5ms~2.5ms 之间,脉宽和舵机的转角0°~180°相对应。
如以脉宽为0.5ms~2.5ms 范围控制舵机的角度转动,转动范围为0°~180°,对应的控制关系如图3所示。
脉宽0.5ms 脉宽1.5ms脉宽2.5ms图3脉宽与舵角关系图3给出了转动角度为0°、90°和180°时对应的脉宽,当转动角度处于0°~180°之间的其它角度时,脉宽在0.5ms~2.5ms 之间线性变化。
舵机收到控制信号后,首先判断转动方向,然后计算转动角度,接着驱动无核心马达开始转动,并通过减速齿轮将动力传输至摆臂,最后由位置检测器返回转动后的位置信号,以此判断舵机是否已经到达设定的位置。
小型舵机的工作电压一般为4.8V 或6V ,转速也不是很快,所以假如更改角度控制脉宽太快时,舵机可能反应不过来。
如果需要更快速的反应,就需要更高的转速了。
要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180°的话,其控制的角度精度是可以达到180°1024≈0.18°,如果假定脉宽为0.5ms~2.5ms 范围,则要求的脉宽控制精度为(2.5-0.5)ms 1024≈2μs 。
3Arduino 控制舵机转角实验舵机转动时电流较大,Arduino 上的芯片可能会因为过流保护发热而损坏,因此不能采用Arduino 板上的电源给舵机供电,需要采用外部电源。
舵机有三根引线,棕色(或黑色)为地线,红色线为电源线(4.8-6V ),黄色是数据线。
选择Arduino 的9号数字口作为舵机的脉冲控制信号输出接口。
采用Arduino 控制舵机角度转动的实验中,通过计算机的USB 口输出电压为Arduino 控制板供电,然后外接电源插到舵机的电源引脚,舵机的地线与Arduino 控制板GND 接口相连,信号口接数字9号口。
连接原理图如图4所示。
具体的线路连接如图5所示。
连接好舵机和Arduino 主控板之后,开始编写控制程序。
首先,需要将Arduino 的9号数字口定义为输出接口,代码如下:pinMode(9,OUTPUT)前文所述,舵机分别用0.5ms~2.5ms 之间的脉宽来对应0到180°左右的角度,且转动的角度与脉宽呈线性关系,按照图3的对应关系,则舵机每转动1°,对应的脉宽为(2.5-0.2)ms 180°,该值除不尽,因此,用一个除不尽的脉冲宽度控制舵机转动,显然转动角度的精度很难控制,为此,实验中以接近2.5ms 且能够整除180的值最为脉宽的变化范围,则取脉宽的范围为0.5ms~2.48ms ,此时,舵机每3720Computer Knowledge and Technology 电脑知识与技术计算机工程应用技术本栏目责任编辑:梁书第8卷第15期(2012年5月)转动1°,则脉宽变化(2.48-0.5)ms 180=11μs 。
因此,定义脉宽与转动角度之间的关系为:pulsewidth=(angle*11)+500(1)其中,pulsewidth 为输出脉冲的宽度,单位为μs ,angle 为控制舵机转动的角度。
用公式(1)把0°到180°的转角映射到500μs 到2480μs 的脉冲时间,控制舵机转动的函数如下所示:void pulse(int angle){int pulsewidth=(angle*11)+500;digitalWrite(9,HIGH);delayMicroseconds(pulsewidth);digitalWrite(9,LOW);}将编写好的控制代码通过Arduino 的IDE 烧录到控制板之后,输入不同的角度值,便会看到舵机执行不同角度的转动信号了。
4结束语本文采用现今较为流行的Arduino 控制板进行了舵机的角度控制,实验验证结果表明,Arduino 控制板具有较高的控制精度,完全满足舵机角度的精度控制。
当有多个舵机同时需要驱动时,Arduino 控制板驱动也会达到很高的精度要求。
参考文献:[1]Jonathan Oxer,Hugh Blemings.Practical Arduino:Cool Projects for Open Source Hardware[M].New York:Springer-Verlag,2009:1-10.[2]杨继志,杨宇环.基于Arduino 的网络互动产品创新设计[J].机电产品开发与创新,2012,25(1):99-100.[3]翁浩峰.利用Arduino 和Flash 开发DISLab [J].物理教师,2010,31(3):45-47.[4]胡小江,董飞垚,雷虎民,等.基于虚拟仪器的舵机半实物仿真系统研究[J].测控技术,2011,30(1):75-78.图4Arduino 控制板驱动舵机原理图图5实验电路图3721。