第4章通用和复用IO功能
第5讲 通用IO口(xkj201611)4

数字I/O端口模块通过64个16位寄存器来设置所有I/O引脚的功能 这些寄存器大概可以分为以下六类
-复用控制寄存器GPxMUX,确定I/O引脚为基本功能,还是 通用I/O功能引脚
- 方向控制寄存器GPxDIR-用来控制I/O引脚的数据方向 -数据寄存器GPxDAT-用来控制I/O引脚的数据 - 设置寄存器GPxSET-用来设置输出引脚的数据(高电平有效) - 清除寄存器GPxCLEAR-用来清除输出引脚的数据(高电平有效) -切换寄存器GPxTOGGLE-用来切换输出引脚的数据(高电平有效) LOGO
no qualification (SYNC to SYSCLKOUT) QUALPRD = SYSCLKOUT/2 QUALPRD . = SYSCLKOUT/4 . QUALPRD = SYSCLKOUT/510
. .
. .
C28x GPIO MUX/DIR Registers
Address 70C0h 70C1h 70C2h 70C4h 70C5h 70C6h 70CCh 70CDh 70CEh 70D0h 70D1h 70D2h 70D4h 70D5h 70D8h 70D9h Register GPAMUX GPADIR GPAQUAL GPBMUX GPBDIR GPBQUAL GPDMUX GPDDIR GPDQUAL GPEMUX GPEDIR GPEQUAL GPFMUX GPFDIR GPGMUX GPGDIR Name GPIO A Mux Control Register GPIO A Direction Control Register GPIO A Input Qualification Control Register GPIO B Mux Control Register GPIO B Direction Control Register GPIO B Input Qualification Control Register GPIO D Mux Control Register GPIO D Direction Control Register GPIO D Input Qualification Control Register GPIO E Mux Control Register GPIO E Direction Control Register GPIO E Input Qualification Control Register GPIO F Mux Control Register GPIO F Direction Control Register GPIO G Mux Control Register GPIO G Direction Control Register
第四章--GPIO接口
if (key_val) //如果还不为0,表示真正有按键按下
下
{ if (0x01 == key_val)
// 如果值为0x1(0b01)表示key1按
GPC1DAT ^= 1 << 3; // 点亮toggle LED1
按下
else if (0x02 == key_val) // 如果值为0x2(0b10)表示key2
因此,对GPIO的学习是展开所有硬件操作的基础 。
413io操作的步骤?首先要确定控制过程所用到的gpio端口的功能如果只是作为基本输入输出引脚来进行控制则大部分情况下不需要进行gpio上拉下拉寄存器的设置如果需要使用引脚其他功能则需对照s5pv210的芯片手册对相应位进行设定
第4章 GPIO接口
本章内容:
GPIO接口时通用输入输出端口,通俗的说,就是 一些引脚,可以通过它们输出高低电平或者通过 它们读入引脚状态——是高电平还是低电平。 GPIO操作是所有硬件操作的基础,由此扩展开来 可以了解所有硬件的操作,这是底层开发人员必 须掌握的。本章主要内容有:
#define GPC1CON long *)0xE0200060))
(*((volatile unsigned
#define GPC1DAT long *)0xE0200064))
(*((volatile unsigned
#define LEDS 1
#define DELAYVAL 1
GPE0、GPE1:13输入/输出引脚。 GPF0、GPF1、GPF2、GPF3: 30输入/输出引脚。 GPG0、GPG1、GPG2、GPG3: 28输入/输出引脚。 GPH0、GPH1、GPH2、GPH3: 32输入/输出引脚。 GPI:低功率12S、PCM。 GPJ0、GPJ1、GPJ2、GPJ3、GPJ4: 35输入/输出引脚。 MP0_1、MP0_2、MP0_3: 20输入/输出引脚。 MP0_4、MP0_5、MP0_6、MP0_7: 32输入/输出引脚。 GPIO的15组引脚既可以作为输入,也可以作为输出。除
自动测试系统-第4章-第1节-VISA概述-教学课件-20181101
• 基本I/O服务 • 格式化I/O服务 • 存储器I/O服务 • 共享存储器服务
第二节VISA库构成
§ 通用的仪器控制资源属性
§ VI_ATTR_INTF_TYPE
给定会话的接口类型
§ VI_ATTR_INTF_NUM
给定接口的板号
§ VI_ATTR_INTF_INST_NAME 给定接口的文本描述
§ VI_ATTR_TMO_VALUE § VI_ATTR_TRIG_ID § VI_ATTR_DMA_ALLOW_EN
等待的最小的时间值, 当前触发机制ID 该属性规定是否I/O访问使用
DMA或可编程I/O。在一些实现 中, 该属性有全局影响。
第二节VISA库构成
§ 仪器控制资源事件
§ VI_EVENT_SERVICE_REQ 服务请求收到
§ I/O接口标准化后,软件的通用性如何体现? § 如何使用Agilent VISA 来访问NI的接口卡?
第一节 VISA概述
§ 两种软件接口设计模型
§ 自顶向下的I/O接口软件设计模型 § 自底向上的I/O接口软件设计模型
§ VISA结构
用户层
用户自定义资源层
仪器资源层
I/O资源层 资源管理层
图 VISA结构
第二节VISA库构成
§ VISA资源类
§ 仪器控制资源 § 存储器访问资源 § GPIB总线接口资源 § VXI主机箱背板资源 § 从者器件侧资源 § TCP/IP套接字资源
第二节VISA库构成
§ 仪器控制资源
§ 使控制器和相关设备交互
• 控制器可以发送数据块到设备, • 向设备请求数据 • 向设备发送清除命令 • 触发设备 • 查找设备状态信息 • 也允许控制器访问设备寄存器
第4章 80C51单片机IO端口及应用最终
24
参考程序:
#include <reg51.h> void main(void) { unsigned char i; P2=0xff; for(;;) { i=P2; P1=i; } }
25
4.6单片机I/O口控制电磁继电器
在控制系统中,常常存在电子电路与电气电路的互 相连接问题,需要电子电路控制电气电路的执行元件, 例如电动机、电磁铁、电灯等,同时实现电子线路与电 气电路的电隔离,以保护电子电路和人身的安全,继电 器在其中起了重要的桥梁作用。
控制
T1
内部总线 写锁存器 读引脚
D P0.x Q 锁存器 Q
BUF2
MUX
P0.x引脚 T2
图4-1 P0口的位电路结构
4
2.P0口工作原理 (1)P0口作为地址/数据总线分时复用口
当80C51单片机外部扩展存储器或者I/O接口芯片,需要 P0口作为地址/数据总线分时使用时,“控制”信号输出高 电平;转换开关MUX 将T2与反相器输出端接通,同时“与 门”开锁,“地址或数据”信号通过与门驱动T1管,并通过 反相器驱动T2管,使得P0.x引脚的输出状态随“地址/数据” 状态的变化而变化。具体输出过程如下。
注意,当P0口作输出口使用时,输出级属开漏电路,在 P0.x引脚应外接上拉电阻。
6
② P0口作为I/O口输入时,端口中的两个三态缓冲器用于读 操作。有2种读操作:读锁存器和读引脚。
“读引脚”:当执行一般的端口输入指令时,引脚上的外部 信号既加在三态缓冲器BUF2的输入端,又加在场效应管T2 漏极上,若此时T2导通,则引脚上的电位被钳在0电平上。 为使读引脚能正确地读入,在输入数据时,要先向锁存器置 “1”,使其Q反端为0,使输出级T1和T2两个管子均被截止, 引脚处于悬浮状态;作高阻抗输入。“读引脚”脉冲把三态 缓冲器打开,于是引脚上的数据经缓冲器到内部总线;
第4章 LPC2000系列ARM硬件结构_64

B 总
UnIER
线
中断标志寄存器 UnIIR
UARTn高速缓存寄存器 UnSCR
UART(0、1)
UARTn发送单元
发送缓冲寄存器 UnTHR
移位寄存器 UnTSR
UARTn波特率发生器
除数锁存寄存器 UnDLL、UnDLM
UARTn接收单元
接收缓冲寄存器 UnRBR
移位寄存器 UnRSR
➢
6.外部存储器控制器 (EMC)
➢ ➢
15.A/D转换器 16.看门狗
➢ 7.引脚连接模块 ➢ 8.GPIO
➢ 17.脉宽调制器(PWM) ➢ 18.实时时钟
4.1 LPC2000系列简介
• 简介
LPC2000系列微控制器基于 ARM7TDMI-S CPU内核。支持ARM和 Thumb指令集,芯片内集成丰富外设, 而且具有非常低的功率消耗。使该系列 微控制器特别适用于工业控制、医疗系 统、访问控制和POS机等场合。
第4章 LPC2000系列ARM硬件结构
目录
➢ 1.LPC2000系列简介 ➢ 9.向量中断控制器
➢ 2.引脚描述
➢ 10.外部中断输入
➢ 3.存储器寻址
➢ 11.定时器0和定时器1
➢ 4.系统控制模块 ➢ 12.SPI接口
➢ 5.存储器加速模块 (MAM)
➢ 13.I2C接口 ➢ 14.UART(0、1)
UART(0、1)
UART0和UART1各含有一个单独的波特 率发生器,两者的功能相同,且相互独立。
名称
描述
复位值
UnDLL[7:0] 除数锁存寄存器低字节 两个寄存器一起构成一个
16位的除数,决定UARTn 未定义 UnDLM[7:0] 除数锁存寄存器高字节 的波特率。
第四章 PLC的特殊功能IO模块
*#21
*#22
禁止零点0和增益G调整 默认设定值b1,b0=0,1(允许);b1,b0=1, 0(禁止)
零点增 益调整 b7 G4 b6 O4 b5 G3 b4 O3 b3 G2 b2 O2 b1 G1 b0 O1
*#23 *#24 #25~#28 #29 #30 #31
零点值:默认设定值=0,调整值以5mV/20μ 为步距。零点:数字量输 出为0时的输入值 增益值:默认设定值=5000,调整值以5mV/20μ A为步距。增益:数字 量输出为+1000时的输入值 空置 出错信息 4A/D模块识别码:K2010 不能使用
图4-3 增益值和零点值的调整
模块的零点与增益调整也可用模块上的增益和偏置调节 按钮与选择开关。无论采用何种方法设置前都必须先将 H0001写入BFM#21。 采用硬件设置的步骤是: 1)模块与PLC主机连接如并接上电源 2) 将FX-4AD方式开关旋至CH1 3)将输入模拟量与CH1相连,调节输入量到需要数值。 4) 按下偏置按钮(OFFSET)一次(偏置值的数字量就 存入相应缓冲数据寄存器) 5) 调节输入模拟量直至达到相应增益值。 6) 增益(GAIN)按钮一次(增益数字量就存入相应缓 冲数据寄存器) 其他通道的增益偏置值设置可依上述步骤同样进行,各 通道设置完毕将方式开关旋至READY位置。
第一节
模拟量输入、输出处理模块
一、模拟量A/D转换输入模块 FX-4AD 4通道、12位高精度 主要功能:电流或电压输入信号—→数字量 1、 FX-4AD的主要技术指标 每一个输入通道设置成电流输入或电压输入方 式 两种输入方式下的主要技术指标如表4-2所示
表4-2 FX-4AD技术指标
项目 电压输入 电流输入 根据是电流输入还是电压输入,使用端子有不同
推荐-第4章 stm32单片机通用输入输出GPIO 精品

为了使不同器件封装的外设IO功能的数量达到最优,可以把一些复用 功能重新映射到其它一些引脚上,这可以通过软件配置相应的寄存器 来完成。
USART3_TX 的默认引出脚是 PB10, USART3_RX 的默认引出脚是 PB11;重映射 后,USART3_TX 的引出脚为 PD8,变更 USART3_RX 的引出脚为PD9
STM32 引脚
PC口 16脚 PD口 3脚
PA口 16脚
PB口 16脚
STM32F103RBT6 包含4个端口: PA口 、PB口、PC口、PD口,共有 51个I/O管脚: PA口 16脚+ PB口16脚+ PC口16脚+ PD口3脚。
4.1 STM32F10x的输入/输出基本结构
4.2 GPIO相关功能寄存器
STM32单片机 最多有7个16位的并行 I/O端口: PA、PB、PC、PD、PE、PF、PG。
STM32F103Cx、103Rx单片机 只有4个16位的 并行 I/O端口:PA、PB、PC、PD。
STM32 引脚
PC口 3脚 PD口 2脚
PA口 16脚
PB口 16脚
STM32F103CBT6 包含4个端口: PA口 、PB口、PC口、PD口,共有 37个I/O管脚: PA口 16脚+ PB口16脚+ PC口3脚+ PD口2脚。
STM32F10x处理器的每个GPIO端口都对应有: 2个32位配置寄存器(GPIOx-CRL,GPIOx-CRH) 2个32位数据寄存器(GPIOx-IDR,GPIOx-ODR) 1个32位置位/复位寄存器(GPIOx-BSRR) 1个16位复位寄存器(GPIOx-BRR) 1个32位锁定寄存器(GPIOx-LCKR)
第4章_S7-200PLC的基础知识

•
工作:PLC运行时,每执行完一遍程序,逻辑运算的结果就存入到相应
的一位存储器中。其中需要控制输出开关的运算结果存到输出映像存储 器中。这个输出映像存储器在PLC程序中,可以按位存取,其中的每一 位,就是一个输出继电器。
27
输入输出elay)
表4.3
16
(3)模块电流 CPU 22X可连接的各扩展模块消耗5VDC电流如 表4.4所示。
表4.4扩展模块所消耗的5VDC电流值
17
最大I/O配制的预算原则:
•映像寄存器的数量
扩展后I/O的总点数不能大于输入和输出映像寄存器的数量。
• CPU的供电能力
同一PLC系统中所有扩展模块所消耗的电流总和不得超过 CPU 所能提供的电流值。 不同型号的CPU提供5VDC和24VDC电源的容量不同。
扩展模块
设备连接
最大I/O配置的预算 I/O点数扩展和编址
第四章 输入输出IO端口
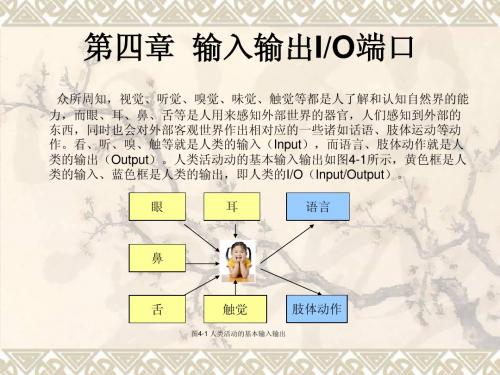
//包含头文件 //代码的主程序 //设置PA[0..5]为输出端口 //关闭所有的等 //无限循环 //东西方向亮绿灯 //南北方向亮红灯 //延时50秒 //关闭东西方向绿灯 // //东西方向亮黄灯 //延时5秒 //关闭东西方向黄灯 //关闭南北方向红灯 //东西方向亮红灯 //南北方向亮绿灯 //延时50秒 //关闭南北方向绿灯 //南北方向亮黄灯 //延时5秒 //关闭南北方向黄灯 //关闭东西图4-1 人类活动的基本输入输出
肢体动作
• 对于单片机而言,了解周围环境的情况、 感知外界事物的变化同样需要像人类的各 种感官这样的输入部件(即输入端口I); 同时,单片机也要对它所感知的事物及变 化做出相对应的处理,也就必须具备输出 部件(即输出端口O)。因此,输入输出 输入输出 I/O端口就是单片机感知外部世界和对外部 端口就是单片机感知外部世界和对外部 世界做出反应的部件, 世界做出反应的部件,通过输入端口获取 外部事物的变化情况, 外部事物的变化情况,并通过输出端口对 外部世界做出回应。 外部世界做出回应
4.2.2 拨码开关的检测
#include <iom16v.h> Main(void) { DDRA = 0xff; DDRC = 0x00; PORTC = 0xff; while(1) { PORTA = PINC; } }
//包含头文件 //代码的主程序 //设置PA端口为输出端口 //设置PC端口为输入端口 //启用PC口内部上拉电阻 //无限循环 //PA口输出PC口的检测值
4.4.1 “交通灯”模型硬件电路及源代码分析 交通灯” 交通灯
#include <iom16v.h> Main(void) { DDRA = 0x3f; PORTA = 0x3f while(1) { PORTA &= ~(1<<0); PORTA &= ~(1<<5); DelayS(50); PORTA |= (1<<0); PORTA &= ~(1<<1); DelayS(5); PORTA |= (1<<1); PORTA |= (1<<5); PORTA &= ~(1<<2); PORTA &= ~(1<<3); DelayS(50); PORTA |= (1<<3); PORTA &= ~(1<<4); DelayS(5); PORTA |= (1<<4); PORTA |= (1<<2); } }
CP1H操作手册.第四章.存储器及分配

4-3
4-1 I/O 存储器区域概要
4-1-2 各 I/O 存储器区域概要
4-1-2
各 I/O 存储器区域概要
■通道 I/O(CIO)区域
地址指定时前面不附带有英文字母符号的区域。 可与各单元进行 I/O 刷新等数据交换。 不 分配到各单元的区域可作为内部辅助继电器使用。 ·X/Y 型 ·XA 型;
15 输入继电器区域 (空闲)* 输出继电器区域 (空闲)* 内置模拟输入输出 (空闲)* 数据链接继电器区域 内部辅助继电器区域
0
位
CPU 高功能单元继电器区域 (25CH/单元)
CPU 高功能单元继电器区域 (25CH/单元)
1899 1900 (空闲)* 1999 2000 高功能 I/O 单元继电器区域 (10 CH/单元) 2959 2960 3100 串行 PLC 链接继电器区域 (3199) 3200 3799 3800
■索引寄存器(IR)
保存 I/O 存储器的有效地址(RAM 上的地址)的专用寄存器。用该寄存器间接指定 I/O 存储器使用。索引寄存器可以在 1 个任务中使用,或者在所有任务共享。
■数据寄存器(DR)
作为通过变址寄存器间接指定的一种,仅用于在变址寄存器中对该数据寄存器的内容相 加的值(偏移指定)进行指定。数据寄存器可以在 1 个任务中使用,或者在所有任务共 享。
内部辅助继电器区域
6143
*:空闲:基本上不使用。但是,内部辅助继电器不足时,可作为内部辅助继电器使用,将来也可 扩展功能。因此,在内部辅助继电器(WR)空闲的情况下,推荐使用内部辅助继电器(WR)。
●输入·输出继电器(输入:0~16 CH,输出:100~116 CH) 用于分配到 CP1H CPU 单元的内置输入输出 及 CPM1A 系列扩展 I/O 单元或扩展单元的 继电器区域。 不使用的输入继电器 CH 及输出继电器编号可作为内部辅助继电器使用。 ●内置模拟输入继电器(内置模拟输入:200~203 CH,输出:210~211 CH) (仅限 XA 型) 用于分配 CP1H CPU 单元 XA 型的内置模拟输入输出的继电器区域。 不可作为内部辅助继电器使用。
第5章 stm32单片机外部中断1

5.3.3 相关功能寄存器
EXTI_IMR(Interrupt mask register )中断屏蔽寄存器
5.3.3 相关功能寄存器
EXTI_EMR( Event mask register )中断事件屏蔽寄存器
5.3.3 相关功能寄存器
EXTI_RTSR(Rising trigger selection register)上升沿触发寄存器
5.3.2 中断控制器
具体有哪些外部中断,在“stm32f10x_nvic.h”这个头文件中 已经定义
5.3.2 中断控制器
5.3.2 中断控制器
ICER[2]:全称Interrupt Clear-Enable Registers,是 一个中断清除使能寄存器组。 该寄存器组与ISER寄存器功能相反,用来清除某个 中断的使能位。由于NVIC的这些寄存器都是写1有 效的,写0是无效的。设置一组ICER 寄存器来清除 相应中断使能位。 ISPR[2]:全称Interrupt Set-Pending Registers,是 一个中断挂起控制寄存器组。 每个位对应的外部中断和ISER内容是一样的。通过 向相应的位写1,可以将正在执行的中断挂起,去执 行同级或更高级别的中断。向这个寄存器组写0是无 效的。
抢占优先级和响应优先级
假定设置中断优先级为组2,然后设置: 中断3(RTC中断)的抢占优先级为2,响应优先级为1。 中断6(外部中断0)的抢占优先级为3,响应优先级为0。 中断7(外部中断1)的抢占优先级为2,响应优先级为0。 求这3个中断的优先级顺序? 上面例子中的中断3和中断7都可以打断中断6 的中断。而中 断7和中断3却不可以相互打断(这是因为他们的抢占优先级 是相同的)。
5.3.2 中断控制器
《JavaEE开发技术与案例教程》第4章 Java Web编程
第4章 Java Web编程
(3) destroy()方法 格式:public void destroy() 说明:该方法用于终止Servlet服务,销毁一个Servlet实 例。
(4) getServletConfig()方法 格式:public ServletConfig getServletConfig() 说明:该方法可获得ServletConfig对象,里面包含该 Servlet的初始化信息,如初始化参数和ServletContext 对象。
对这些初始化参数的访问可以在init()方法体中通 过getInitParameter()方法进行获取。 <load-on-startup>用于指定容器载入Servlet时的优先顺 序。如果Servlet没有设定<load-on-startup>载入优先级, 则Servlet容器会在这个Servlet被访问时再进行初始化。
所有的Servlet 对象都要实现Servlet 接口。已经实 现了Servlet 接口的javax.servlet.GenericServlet 和 javax.servlet.http.HttpServlet 这两个抽象类的子类来间 接实现Servlet 接口。
第4章 Java Web编程
1. Servlet接口 用户编写的Servlet程序都必须实现javax.servlet.Servlet 接口,该接口是ServletAPI的核心,在这个接口中有5 个方法必须实现。
第4章 Java Web编程
(2) service()方法 格式:public void service(ServletRequest req,ServletResponse res) throws ServletException,IOException 说明:Servlet成功初始化后该方法会被调用,用于处 理用户请求。该方法在Servlet生命周期中可执行很多 次,每个用户的请求都会执行一次service()方法,完成 与相应客户端的交互。
4 微机原理第四章 16位微处理器

20 位
AX BX CX DX
16 位 段 寄 存 器
指令指针
SP
BP DI SI
CS DS SS ES IP 内部暂存器 外部总线
EU
16 位
数据总线
运 算 寄 存器
总线
BIU
执行 控制 电路
控制 逻辑
8088 8位 8086 16位
A L U
指令对列
1 2 3 4
标志寄存器
8086为 6 字节
(( 5 )在执行转移指令时,指令队列中的原有内容被自动清 (3) 4 在执行指令的时,需要访问 EU又没有总线访问时, M或I/O设备,8088 EU会请求 BIU 1)当指令列已满,而且 )每当 8086 的指令队列中有两个空字节( 有一 2 EU 准备执行一条指令时,它会从指令队列取指 除, BIU 会接着往指令队列中装入另一个程序段中的指令。 便进入空闲状态。 BIU ,完成访问内存或 I/O端口的操作。 个空字节)时, BIU就会自动把指令取到指令队列中。 令,然后用几个时钟周期去执行指令。
16 位
总线接 口单元 (BIU)
总线 控制 逻辑 外部总线
8088 8位 8086 16位
运 算 寄 存器
指令对列
A L U
执行 控制 电路
8086为 6 字节
1
2
3
4
标志寄存器
执行单元 (EU)
4.1 8086的结构 从功能上分为两部分:BIU和EU, 内部结构如图所示。
4.2.1 执行单元EU
片内总线等
1. 第一代——4位或低档8位微处理器 第一代微处理器的典型产品是Intel公司
1971年研制成功的4004(4位CPU)及1972年 推出的低档8位CPU 8008。
第五章 通用输入输出端口(GPIO)
0x0000 70C1 1
GPAQUAL 0x0000 70C2 1
GPBMUX
0x0000 70C4 1
GPBDIR
0x0000 70C5 1
GPBQUAL 0x0000 70C6 1
GPDMUX
0x0000 70CC 1
GPDDIR
0x0000 70CD 1
GPDQUAL 0x0000 70CE 1
while(1) {
GpioDataRegs.GPASET.all =0xAAAA; GpioDataRegs.GPACLEAR.all =0x5555; delay_loop(); GpioDataRegs.GPACLEAR.all =0xAAAA; GpioDataRegs.GPASET.all =0x5555;
while(1)
{ GpioDataRegs.GPADAT.all =0xAAAA; delay_loop();
GpioDataRegs.GPADAT.all delay_loop(); } }
=0x5555;
使用SET/CLEAR寄存器反转触发I/O引脚
void Gpio_example2(void) {
端口设置
void Gpio_select(void)
{
Uint16 var1;
Uint16 var2;
Uint16 var3;
var1= 0x0000;
// sets GPIO Muxs as I/Os
var2= 0xFFFF;
// sets GPIO DIR as outputs
var3= 0x0000;
//所有中断,标志清零。
IER = 0x0000; //关闭CPU中断,清除所有CPU中断标志;
第4章-Data-Acquisition子模板与IO接口设备的软件驱动PPT优秀课件
4.1.2.1 模拟信号输入部分 ① 模拟输入通道数。该参数表明数据采集卡所能够
采集的最多的信号路数。 ② 信号的输入方式。一般待采集信号的输入方式有:
l 单端输入:即信号的其中一个端子接地。 l 差动输入:即信号两端均浮地。 l 单极性:信号幅值范围为[0,A],A为信号最大幅值。 l 双极性:信号幅值范围为[–A,A]。
4.1.1.1 传感器及其调理电路 只有那些数值大小合适的电压信号可以直接进入虚
拟仪器平台外,大多数被测信号要经由传感器及其调 理电路才能进入虚拟仪器系统,也可以说虚拟仪器的 输入信号大多数来自传感器及其调理电路。
① 传感器。传感器完成信号的获得,它将被测参量 转换成相应的可用输出信号。被测参量可以是各种非 电气参量,如压力、温度、加速度等,也可以是电气 量,如电力输电线路电网电压及电流等。高压电网通 过高压互感器将电网高电压变为100 V电压,通过电流 互感器将电网大电流变为5 A电流后再采用电压、电流 传感器或变送器将100 V、5 A分别转换成5 V低电压送 到虚拟仪器。
l 分辨率:12位。 l 单通道最大采样率:100 kHz/s。 ② D/A转换部分,即后向通道,主要性能指标如下: l 分辨率:12位。 l 响应时间(即最快刷新速率的倒数):1 ms。
4.1.6 Lab–PC–1200型数据采集卡的安装检验与参 数设置
在进行数据采集卡软件驱动前应进行参数设置, LabVIEW提供了Measurement & Automation软件。该软 件可以自动检测到与系统(PC机)相连的设备(如DAQ卡、 GPIB、VISA、VXI、IMAQ等硬件产品),并可调用相 应设备的设置软件对设备参数进行设置。
第五章通用和复用功能IO口
第五章通用和复用功能IO口1.引言通用和复用功能IO口是现代数字电路设计中的重要组成部分。
它们允许电路与外部设备进行通信和控制,实现数据的输入、输出和处理。
在本章中,我们将介绍通用和复用功能IO口的基本原理和应用。
通用功能IO口是一种通用的输入/输出接口,可以通过软件来配置不同的功能。
它可以被用作输入口,用来读取外部设备的状态;也可以被用作输出口,用来控制外部设备的运行。
通用功能IO口通常由一组引脚组成,每个引脚都可以配置为不同的功能。
通过编程的方式,我们可以根据需要来选择引脚的功能,并进行相应的输入和输出操作。
复用功能IO口是一种多功能的输入/输出接口,可以通过硬件设置来选择不同的功能。
它通常由一个多路器和多个外设模块组成。
多路器的作用是选择不同的外设模块进行连接,从而实现不同的输入和输出功能。
使用复用功能IO口,可以有效地减少芯片上的引脚数量,提高系统的可扩展性和灵活性。
4.通用功能IO口的应用通用功能IO口广泛应用于各种数字电路设计中。
它可以连接各种外设设备,如按钮、开关、传感器、LED灯等。
通过编程的方式,我们可以读取外设的状态,并根据需要来控制外设的运行。
通用功能IO口还可以连接到其他数字电路中,实现数据的输入、输出和处理。
例如,它可以与存储器、处理器、通信接口等进行连接,实现数据的存储、处理和传输。
5.复用功能IO口的应用复用功能IO口广泛应用于嵌入式系统和通信系统中。
它可以连接各种外设设备,如显示器、触摸屏、以太网接口、USB接口等。
通过硬件设置,我们可以选择不同的外设模块进行连接,并根据需要来实现不同的输入和输出功能。
复用功能IO口还可以连接到其他模块中,实现数据的传输和处理。
例如,它可以与显示模块、通信模块等进行连接,实现图形的显示、数据的传输等。
6.小结通用和复用功能IO口是现代数字电路设计中的重要组成部分。
它们允许电路与外部设备进行通信和控制,实现数据的输入、输出和处理。
通过软件和硬件的配置,我们可以选择引脚的功能,并进行相应的输入和输出操作。
第1011次课第4章并行IO端口原理及编程
• 内容 • 并行I/O口的结构及工作原理 • P0、P1~P3口内部的结构异同 • 方法: • 记忆、逻辑分析
第4章 并行I/O端口原理及编程
4.1 并行I/O端口的结构及工作原理
4个并行I/O端口P0~P3;
P0、P2端口可作地址总线; P0数据总线;
P3端口具有第二功能; 特殊功能寄存器控制I/O端口。
#include <reg51.h>
void delay( int i)
{ int t;
while(i--)
{ for(t=0;t<120;t++);}
} void main()
{ while(1)
不要忘记
{
P1=P1|0x01; delay(500);
P1=P1&0xFE; delay(500);
寄存 器
板书
D7 D6 D5 D4 D3 D2 D1 D0 11111111
P1.7
P1.1 P1.0
P1口P1.0连接的LED一亮一灭,并且其他引脚P1.1~P1.7状态
不变。 P1.0置成“0”,则LED亮;
P1 = P1 & 0xFE;
P1.0置成“1”,则LED灭;
P1 = P1 | 0x01;
while(1) { temp=0x01;
for(i=0;i<8;i++) { P1=~temp;
delay( ); temp= temp<<1; }
temp=0x80; for(i=0;i<8;i++) { P1=~temp;
delay( ); temp= temp>>1; } } }
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1. 通用 I/O 的复位状态与配置
• 复位期间和刚复位后,复用功能未开启,I/O 端口被配置成浮空输入模式(CNFx[1:0]=01b, MODE[1:0]=00b).
• 复位后,JTAG引脚被置于输入上拉或下拉模式:
– PA15:JTDI置于上拉模式 – PA14:JTCK置于下拉模式 – PA13:JTMS置于上拉模式 – PB4: JNTRST置于上拉模式
配置模式
推挽式 (Push-Pull)
开漏(OpenDrain)
推挽式 (Push-Pull)
开漏(OpenDrain)
模拟输入
输入
浮空输入 下拉输入
上拉输入
CNF1 0 1 0
1
CNF0 0
MODE1 MODE0 01
1
10
0
11
1
见下表
0 1
00 0
PxODR寄存器 0或1 0或1 不使用 不使用 不使用 不使用
0 1
输出模式位
MODE[1:0] 00 01 10 11
意义 保留 最大输出速度为10MHz 最大输出速度为2MHz 最大输出速度为50MHz
4.2 GPIO 功能描述
• 4.2.1 通用 I/O ( GPIO )
– 通用 I/O 的复位状态与配置 – 单独的位设置或位清除 – 外部中断/唤醒线 – GPIO 锁定机制
4.1 GPIO 基本配置
根据每个 I/O 端口的特定硬件特征,GPIO 端口 的每个位可以由软件分别配置成多种模式:
– 输入浮空 – 输入上拉 – 输入下拉 – 模拟输入 – 开漏输出 – 推挽式输出 – 推挽式复用功能 – 开漏复用功能
I/O端口位的基本结构
端口位配置表
通用 输出
复用 功能 输出
(4)对输入数据寄存器的读访问可得到I/O 状态
输入配置: 可配置成浮空/上拉/下拉输入模式
例:将GPIOA所有的引脚都设置为输入浮空模式
/* 选择配置的引脚 */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_All; /* 选择引脚翻转的速度 */ GPIO_InitStructure.GPIO_Speed = GPIO_Speed_10MHz; /* 选择输入是浮空模式*/ GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; /* 初始化引脚 */ GPIO_Init(GPIOA, &GPIO_InitStructure);
例:将GPIOA的第7、第8引脚置成低电平 GPIO_ResetBits(GPIOA, GPIO_Pin_7 | GPIO_Pin_8);
例:将GPIOB的第9引脚配置成外部中断Line9
/* 连接 EXTI Line9 到 PB.09 */ GPIO_EXTILineConfig(GPIO_PortSourceGPIOB,
3、外部中断/唤醒线
• 所有端口都有外部中断能力,为了使用外 部中断线,端口必须配置成输入模式。
• 更多的关于外部中断的信息,参考 《STM3210xReference》:
• 6.2节:外部中断/事件控制器P83 6.2.3节:唤醒事件管理P84
例:将GPIOC的第9引脚置成高电平 GPIO_SetBits(GPIOC, GPIO_Pin_9);
GPIO_PinSource9); /* 设置 EXTI Line9 为下降沿中断 */ EXTI_InitStructure.EXTI_Line = EXTI_Line9; EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt; EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Falling; EXTI_InitStructure.EXTI_LineCmd = ENABLE; EXTI_Init(&EXTI_InitStructure);
• 复位后可以根据对 I/O 端口的使用进行再配 置。
1. 通用 I/O 的复位状态与配置
• 当作为输出配置时,写到输出数据寄存器 上的值(GPIOx_ODR) 输出到相应的I/O引脚。 可以以推挽模式或开漏模式使用输出驱动 器。
• (1)输出缓冲器被激活 • (2)施密特触发输入被激活 • (3)弱上拉和下拉电阻被禁止 • (4)出现在I/O脚上的数据在每个APB2时
钟被采样到输入数据寄存器
输出配置: 可配置成推挽模式或开漏模式
例:将PC6-PC9引脚设置为输出推挽模式
/* 选择配置的引脚 */ GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6 | GPIO_Pin_7
| GPIO_Pin_8 | GPIO_Pin_9; /* 选择引脚翻转的速度 */ GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz; /* 选择输出是推挽模式*/ GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_PP; /* 初始化引脚 */ GPIO_Init(GPIOC, &GPIO_InitStructure);
2. 单独的位设置或位清除
• 当对GPIOx_ODR的个别位编程时,软件不需 要禁止中断:在单次APB2写操作里,可以 只更改一个或多个位。
• 这是通过对“置位/复位寄存器”(置位复 位寄存器是:GPIOx_BSRR,复位寄存器是: GPIOx_BRR)中想要更改的位写1 来实现的。 没被选择的位将不被更改。
• 当作为输入配置时,输入数据寄存器(GPIOx_IDR) 在每个APB2时钟周期捕捉I/O引脚上的数据。所有 GPIO 引脚有一个内部弱上拉和弱下拉,它们可以 被激活或不被激活。
(1)输出缓冲器被Байду номын сангаас止
(2)施密特触发输入被激活
(3)根据输入配置(上拉,下拉或浮动)的不同,弱 上拉和下拉电阻被连接
第4章 通用和复用功能I/O (GPIO和AFIO)
4.1 GPIO 基本配置
• 每个 GPI/O 端口有:
– 2 个 32 位配置寄存器( GPIOx_CRL, GPIOx_CRH ),
– 2 个 32 位数据寄存器( GPIOx_IDR, GPIOx_ODR ),
– 1 个 32 位置位/复位寄存器( GPIOx_BSRR ), – 1 个 16 位复位寄存器( GPIOx_BRR ) – 1 个 32 位锁定寄存器( GPIOx_LCKR )。