基于纵向力分配的轮边驱动电动汽车稳定性控制
基于纵向力分配的轮边驱动电动汽车稳定性控制
$M =
b 2 ( - F x fl + F x fr - F x rl + F x rr )
( 2)
式中: F x fl为左前 轮所受纵向力; F x fr 为 右前轮所受 纵向力; F x rl 为左后轮所受纵向力; F x rr 为右后轮所 受纵向力; b 为轮距.
若 令 广 义 力 v = Fx , M z T, 令 u = F x fl, F x fr, F x rl , F x rr T , 则式( 2) 可改写为
四轮控制分配问题可以考虑采用重新分配广义 逆法, 加权最小二乘法以及层叠广义逆法求解. 仿真 分析表明, 加权最小二乘法相比其他两种方法在计 算时间与平均/ 最大迭代次数方面均具有明显优
第3期
熊 璐, 等: 基于纵向力分配的轮边驱动电动汽车稳定性控制
419
势[ 9] . 故本文采用加权最小二乘法作为实车控制分 配器的分配算法. 首先选定一个合理的优化目标, 该
418
同 济 大 学 学 报( 自 然 科 学 版)
第 38 卷
1 车辆稳定性控制结构
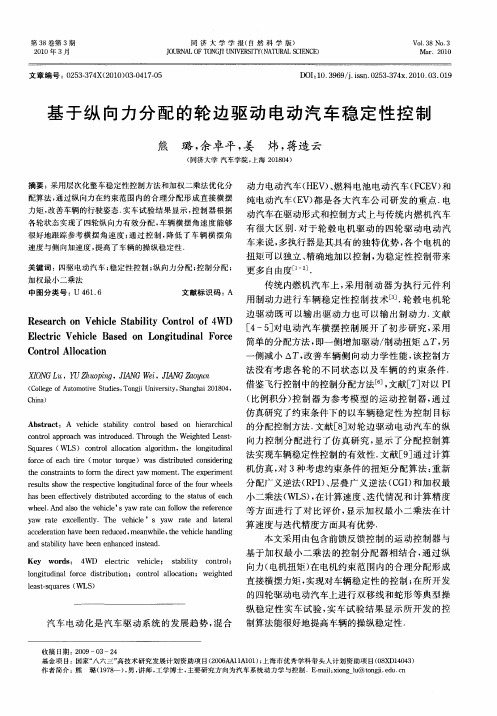
基于控制分配算法的整车稳定性控制结构分为 两层( 图 1) , 由运动控制器和控制分配器构成[ 8] .
图 1 车辆稳定性控制结构 Fig. 1 Vehicle stability control structure
动力电动汽车( H EV ) 、燃料电池电动汽车( FCEV) 和纯电动汽车( EV) 都是各大汽车公司研发的重点. 电动汽车在驱动形式和控制方式上与传统内燃机汽 车有很大区别. 对于轮毂电机驱动的四轮驱动电动 汽车来说, 多执行器是其具有的独特优势, 各个电机 的扭矩可以独立、精确地加以控制, 为稳定性控制带 来更多自由度[ 1- 2] .
电动汽车稳定性的横摆力矩控制
电动汽车稳定性的横摆力矩控制张金柱张洪田孙远涛哈尔滨工程大学动力与能源工程学院,黑龙江哈尔滨150001摘要:针对轮毂电机式电动汽车的稳定性控制问题,建立了七自由度整车模型和非线性轮胎模型。
在此基础上,提出基于横摆力矩控制的电动汽车稳定性控制策略。
通过线性二自由度车辆模型计算理想质心侧偏角和理想横摆角速度。
采用状态观测器估计实际质心侧偏角。
以汽车质心侧偏角和横摆角速度为控制变量,设计了基于滑模理论的稳定性控制器。
通过对单个车轮施加驱动或制动控制,产生纠正汽车行驶状态的横摆力矩。
建立了基于CarSim和Matlab/SIMULINK的稳定性控制系统虚拟仿真平台,在双移线工况下进行仿真分析。
结果表明该稳定性控制器能够快速施压驱动力或制动力,及时、准确地控制汽车的横摆角速度和质心侧偏角,避免汽车产生不足转向或过多转向,使汽车实际运行的路径与期望路径保持一致,提高了汽车的操纵稳定性。
电动汽车稳定性;滑模控制;横摆力矩;质心侧偏角;横摆角速度U461.6A1007- 449X (2012) 06- 0075- 06The direct yaw control of electric vehicle stability control ZHANG Jin-zhuZHANG Hong-tianSUN Yuan-tao2012 -03 -26黑龙江省自然科学基金(E200950);哈尔滨市优秀学科带头人项目(2010RFXXG001)张金柱(1963-),男,博士研究生,教授,研究方向为汽车电控技术,汽车动力工程;张洪田(1962-),男,博士,教授,博士生导师,研究方向为动力机械工程;孙远涛(1981-),男,博士研究生,实验师,研究方向为汽车动力工程。
万方数据以安装到每个制提高了汽车万方数据万方数据万方数据万方数据@@[ 1 ] NAKAZAWA M, ISOBE O, TAKAHASHI S, et al. Braking force distribution control for improved vehicle dynamics and brake per formance[ J ]. Vehicle System Dynamics, 1995, 24 ( 4 ) : 413 -426.@@[2] 赵景波,周冰,贝绍轶.电动汽车EPS系统阻尼工况Bang Bang PID控制[J].电机与控制学报,2011, 15(11): 95-100. ZHAO Jingbo, ZHOU Bing, BEI Shaoyi. Bang-Bang-PID control of automotive EPS system under damping condition[J].Electric Machines and Control, 2011, 15(11):95 - 100.@@[3] 张志远,万沛霖.一种用于电动车辆驱动控制的模糊控制系统 设计[J].电机与控制学报,2005,9(3):203 -206. ZHANG Zhiyuan,WAN Peilin.Design of a fuzzy control system in driving control of electric vehicle[J].Electric Machines and Con trol, 2005, 9(3): 203 -206.@@[4]丁惜瀛,张钦爽,覃艳丽,等.基于转矩分配的电动汽车横摆稳 定性控制[J].大功率变流技术,2010(5):41-44. DING Xiying,ZHANG Qinshuang,TAN Yanli, et al. Yaw stability control of EV based on torque distribution[ J]. High Power Con verter Technology, 2010( 5 ) : 41 -44.@@[5] ONOE, HATTORI Y, Muragish Y,et al. Vehicle dynamics inte grated control for four wheel distributed steering and four wheel distributed traction/braking systems[ J]. Vehicle System Dynam ics, 2006, 44(2) : 139-151.@@[6] 罗虹,张立双,来飞,等.采用横摆力矩优化分配方法的车辆稳 定性控制系统[J].重庆大学学报,2010,33(10): 19-24. LUO Hong, ZHANG Lishuang, LAI Fei, etal. Vehicle stability control system design using optimal allocation of yaw moment[ J]. Journal of Chongqing University, 2010, 33(10) : 19 -24.@@[7] TAHAMI F, FARHANGI S, KAZEMI R. A fuzzy logic direct yaw moment control system for all wheel drive electric vehicles [ J ]. Vehicle System Dynamics. 2004, 41 (3): 203 -221.@@[ 8 ] KIM D H, KIM J M, HWANG S H, et al. Optimal brake torque distribution for a four wheel drive hybrid electric vehicle stability enhancement[J]. Journal of Automobile Engineering. 2007, 221 (D11) : 1357 -1366.@@[9]玄圣夷,宋传学,靳立强,等.基于多级鲁棒PID控制的汽车稳 定性控制策略[J].吉林大学学报:工学版,2010,40(1): 13 -18. XUAN Shengyi,SONG Chuanxue, JIN Liqiang, etal. Multilevel robust PID control strategy for vehicle stability control[J]. Journal of Jilin University: Engineering and Technology Edition, 2010, 40 (1): 13-18.@@[10] YOU Seung-Han, HAHN Jin-Oh, LEE Hyeong-cheol. New a daptive approaches to real-time estimation of vehicle sideslip an gle[J]. Control Engineering Practice, 2009, 17(12): 1367 - 1379.@@[11] YI K, CHUNGT, KIM J,et al. An Investigation into differential braking strategies for vehicle stability control[ J]. Journal of Au tomobile Engineering, 2003, 217(12) : 1081 - 1094.@@[12]唐国元,宾鸿赞.ABS的模糊滑模变结构控制方法及仿真研 究[J].中国机械工程,2007,18(13):1630 -1632. TANG Guoyuan, BIN Hongzan. Simulation study on fuzzy sliding mode control approach for ABS [ J ]. China Mechanical Engineer ing, 2007,18(13) : 1630 - 1632.@@[13] YI Kyongsu, CHUNG Taeyoung,KIM Jeontae,et al. An investi gation into differential braking strategies for vehicle stability con trol[J]. Journal of Automobile Engineering, 2003, 217(12) : 1081 - 1093.@@[14]于卓平,姜炜,张立军.四轮轮毂电机驱动电动汽车扭矩分配 控制[J].同济大学学报:自然科学版,2008,36(8): 1115 -1119. YU Zhuoping, JIANG Wei, ZHANG Lijun. Torque distribution control for four wheel In-wheel-motor electric vehicle[J]. Journal of Tongji University: Natural Science, 2008, 36 (8): 1115 -1119.@@[15] CHEN B C, PEN G H. Differential braking based rollover preven tion for sport utility vehicles with human-in-the-loop evaluations [J]. Vehicle System Dynamics, 2001,36(4/5): 359-389.@@[ 16] MASAO Nagai, MOTOKI Shino, FENG Gao. Study on integrated control of active front steer angle and direct yaw moment [ J ]. JSAE Review, 2002, 23(3) : 309-315.@@[17]熊璐,余卓平,姜炜,等.基于纵向力分配的轮边驱动电动汽 车稳定性控制[J].同济大学学报:自然科学版,2010, 38 (3):417 -421. XIONG Lu,YU Zhuoping,JIANG Wei,et a1.Research on Vehi cle Stability Control of 4WD Electric Vehicle Based on Longitudi nal Force Control Allocation[ J]. Journal of Tongji University: Natural Science, 2010, 38(3): 417 -421.万方数据。
提高车辆稳定性控制系统STEERABILTY、横向稳定性和侧倾稳定性

提高车辆稳定性控制系统STEERABILTY、横向稳定性和侧倾稳定性摘要:车辆稳定性控制系统是一种主动的安全系统,为防止事故发生并利用微分制动器产生人工横摆力矩稳定车辆的机动而设计。
在本文中,为了提高车辆的操纵性,横向稳定性,和侧倾稳定性,每个参考横摆角速度的设计和组合到目标横摆角速度都取决于驾驶情况。
偏航角速度控制器的设计以及跟踪目标横摆角速度都是基于滑模控制理论。
横摆角速度控制器所需的总的横摆力矩以及每个制动器压力的合理分布,都由有效控制车轮决定。
估计算法是一种可以识别出滚动角和车身侧滑角的简化动力学模型和参数自适应的方法。
本文中所提出的车辆稳定性控制系统和估计算法的性能与仿真结果可以验证实验结果。
关键词:车辆稳定性控制系统,目标横摆角速度,角速度控制器,制动力分配,滚动角估计,车身侧滑角估计1.介绍有一个日益需求的主动安全系统,通过人工干预的方法以防止或减少事故的发生(You et al .,2006)。
这个系统超出仅仅最小化损失事故的被动安全概念,它的必要性日益被市场所公认。
因此, 近年来进行了不同的地面上车辆主动安全系统的研究。
尽管有其他替代技术保护车辆的稳定性,例如4 ws(四轮引导),AFS(主动前轮引导),后轮转向,和微分牵引(Song et al .,2007),最近的主流车辆安全系统是集中在制动差动和制动干预。
这主要是从硬件现有的可靠性和成本效率出发考虑得出的结果。
现有的技术成果有ABS(防抱死制动系统)和TCS(牵引力控制系统)以及在制动/加速度时持有车轮滑转线性滑动。
在这里假设车辆配备了差动制动系统,因此, 本文提出了车辆稳定控制系统主要研究通过生成与控制车辆的横摆力矩差动制动在四个车轮。
本文使用的横摆角速度是一个控制变量。
由于车辆的车身侧偏角可以使横摆角速度稳定控制在一个适当的参考横摆角速度,使车身侧滑角动力转变成稳定的内部动力(You et al .,2006)。
同样,翻车的风险可以通过稳定辊动力学和控制横摆率减轻。
新能源汽车车身稳定性控制系统的研究与优化
新能源汽车车身稳定性控制系统的研究与优化随着全球对环境保护和能源替代的日益重视,新能源汽车作为一种清洁能源交通工具受到了广泛关注。
新能源汽车的发展不仅可以有效减少对传统石油能源的依赖,还可以降低运行成本、减少尾气排放,对环境友好。
然而,新能源汽车也面临着一些挑战,其中之一就是车辆的稳定性控制系统设计与优化问题。
在过去的几年里,随着新能源汽车技术的不断完善和发展,车身稳定性控制系统成为了研究的热点之一。
车身稳定性控制系统是指通过传感器感知车辆当前的状态,运用控制算法调整发动机、制动系统等车辆部件的工作状态,以提高车辆在不同路况下的操控性、稳定性和安全性。
该系统的设计和优化对于保障新能源汽车的安全性和性能至关重要。
为了提高新能源汽车的车身稳定性控制系统的性能,需要对系统进行深入的研究和优化。
首先,需要对车辆在不同路况下的动力学特性进行分析,以建立车辆稳定性控制系统的数学模型。
然后,可以根据建立的模型设计相应的控制算法,从而实现对车辆的稳定性控制。
同时,还可以通过机电一体化技术和智能控制技术来提高系统的自适应性和灵活性,以适应复杂多变的路况和驾驶环境。
在系统设计和优化过程中,还需要考虑到不同车辆型号和不同驾驶习惯对车身稳定性控制系统的影响。
通过对不同车辆和不同驾驶模式的实际测试数据进行分析和比对,可以优化系统的参数设置和控制策略,以提高系统的响应速度和稳定性。
此外,还可以采用先进的传感器技术和数据处理算法来提高系统的感知性能和准确性,确保系统对车辆状态的实时监测和反馈。
除了技术创新,车身稳定性控制系统的研究与优化还需要考虑到制度和的支持。
相关部门部门可以通过出台相关和标准来规范新能源汽车的车身稳定性控制系统设计和生产,促进系统技术的不断完善和推广应用。
同时,还需要加强对新能源汽车技术的宣传和推广,提高社会对新能源汽车的认知度和接受度,从而推动新能源汽车的发展和普及。
让我们总结一下本文的重点,我们可以发现,新能源汽车车身稳定性控制系统是新能源汽车技术研究的重要方向之一,其设计和优化对于提高车辆的操控性、稳定性和安全性具有重要意义。
分布式驱动电动汽车驱动控制技术研究综述
分布式驱动电动汽车驱动控制技术研究综述贾婕;赵景波;杨超越;陈云飞【摘要】分布式驱动电动汽车具有控制灵活、控制响应快等优势,越来越受到人们的关注.文章叙述了分布式驱动电动汽车驱动控制技术的研究现状,重点介绍了电子差速控制、横摆力矩控制、多目标协调集成控制和容错控制等控制技术的研究方法以及国内外研究现状,并对当前存在的问题及发展趋势进行了分析.【期刊名称】《常州工学院学报》【年(卷),期】2019(032)002【总页数】6页(P1-6)【关键词】分布式驱动;电动汽车;驱动控制;智能控制【作者】贾婕;赵景波;杨超越;陈云飞【作者单位】江苏理工学院 ,江苏常州 213001;江苏省新能源汽车动力系统集成控制重点建设实验室 ,江苏常州 213001;常州工学院 ,江苏常州 213032;江苏理工学院 ,江苏常州 213001;江苏省新能源汽车动力系统集成控制重点建设实验室 ,江苏常州 213001;江苏理工学院 ,江苏常州 213001;江苏省新能源汽车动力系统集成控制重点建设实验室 ,江苏常州 213001【正文语种】中文【中图分类】U469.72近年来,由于能源危机和环境问题,电动汽车逐渐成为研究热点。
电机和电机控制器技术的改进,为多种动力传动系统配置提供了更多的可能。
随着对电动汽车的深入研究,分布式驱动电动汽车开始备受关注。
它通过4个轮边电机分别驱动4个车轮实现独立控制。
该结构具有转矩响应速度快、精度高以及单个电机独立可控等优点,为车辆底盘的动力学控制提供了广阔的前景。
对分布式驱动电动汽车驱动控制技术进行研究,充分利用其独立驱动等优势,对改善车辆的动力性能以及稳定性、安全性具有重大意义。
1 分布式驱动电动汽车的优势相比于传统汽车以及中央驱动的电动汽车,分布式驱动电动汽车具有较大的优势和潜力。
1)取消了大部分的传动结构,减少车辆底盘部件数量,节省底盘空间,为实现整车轻量化带来了可能。
与集中驱动的车辆相比,可以获得更大的能量回收率,能够有效提高电动汽车的续航里程。
电动汽车后轮轮毂电机驱动的操纵控制
电动汽车后轮轮毂电机驱动的操纵控制祁新梅;郑寿森;付青【摘要】针对后轮轮毂电机驱动特定中速轻型电动汽车,集成运动学模型、动力学模型和轮毂电机机电模型,形成一个包含车辆纵向平动、横向平动、绕z轴的横摆运动、后轮驱动力、电机速度、电机驱动转矩等特性参数的控制模型;后轮的纵向驱动力与滑转率相关,横向力与侧偏角相关;采用Ackermann模型进行理想化速度分配,以行驶速度、两个电机转速作为控制变量和反馈变量;通过直线行驶速度阶跃变化、直线行驶速度缓慢变化、速度恒定转角阶跃变化和速度恒定转角正弦变化等四种行驶状态的仿真,对比分析了三环节集成PID控制模型、一环节控制模型和初始模型的响应特性,验证了控制模型的有效性.【期刊名称】《中山大学学报(自然科学版)》【年(卷),期】2019(058)001【总页数】8页(P83-90)【关键词】轮毂电机;后轮驱动;电动汽车;PID控制【作者】祁新梅;郑寿森;付青【作者单位】中山大学物理学院, 广东广州510275;中山大学物理学院, 广东广州510275;中山大学物理学院, 广东广州510275【正文语种】中文【中图分类】V469.72电动汽车以车载电源代替石油能源,以电动机代替内燃机,具有能量转换高、零排放等优点,是目前应对石化能源衰竭和环境恶化问题的首选城市交通工具。
现有成熟的电动汽车结构都是基于传统的内燃机汽车的集中驱动机构,除了动力源从内燃机变成电源外,主要动力传递结构与传统汽车类似,由减速器、机械差速和随动系统等把电机输出的力矩传递到车轮上,动力系统体积大、重量大、传动效率低。
分布式驱动电动汽车是动力控制的新形式,主要有轮边电机驱动与轮毂电机驱动[1-3]。
其中,轮毂电机驱动是将驱动电机直接安装在车轮中,传动效率高、不占用车身空间。
另外,适应强振动、多泥水等复杂工况的新型轮毂电机也得到了快速的发展[4-6]。
轮毂电机驱动对每个轮独立控制,实现转向、加速、启动、刹车、减速,去掉了底盘中的机械差速系统,缩短了传动链,减轻了汽车重量,简化了汽车结构,提高了可靠性和汽车续驶里程,具有动力系统体积小、传送效率高、可控性强的优点。
下载文档 - 同济大学研究生院
徐之松 外国哲学 陈欢 职业技术教育学
刘日明 柏拉图“灵魂不死”学说的解读 徐朔 引导教学法在职业学校中的应用研究
罗凤兰 职业技术教育学 余晓磊 国际法学 陆路 董昕 国际法学 国际法学
颜明忠 建筑业农民工MES模块化课程培训模式的研究 高旭军 国际经济中企业并购引发的垄断问题研究 高旭军 WTO争端解决机制中的第三方制度研究 高旭军 中国公司德国证券市场上市规则研究 高旭军 WTO框架下的中欧汽车零部件贸易纠纷 高旭军 中德企业跨国破产制度比较研究 高旭军 论国际保理中的风险及其防范对策 高旭军 我国再保险监管法律问题研究 黄自萍 弹性波方程的数值模拟 边保军 利率互换定价及对互换中介机构主要风险的模拟分析 陈宇光 半导体量子线中自旋极化电子输运的理论研究 顾牡 顾牡 X射线激发发射谱仪的研制与衰减时间谱仪的改进 第一性原理研究钽酸盐发光材料的电子性质与光学性 质
朱基千 P2O5含量对氟化镓铟玻璃热学及光学性能影响的研究 刘琳 浦鸿汀 阻燃剂BPS的合成及其在尼龙中的应用研究 二氧化硅中空微球的制备及其在质子交换膜中的应用 研究
浦鸿汀 聚脲气相沉积聚合研究 浦鸿汀 5-乙烯基四唑类聚合物质子导电材料的研究 张雄 张雄 张雄 张雄 张雄 水泥基材料用竹纤维制备工艺及其性能的研究 高性能补偿收缩水泥基灌浆料的研制 新型低密度油井水泥浆体的研制 建筑节能用相变材料的应用研究 混凝土凝结时间调控外加剂及其机理研究
叶伟宏 车辆工程 张健 车辆工程
余卓平 汽车悬架橡胶衬套半经验参数化模型研究 余卓平 四轮轮边驱动电动车横摆角速度估计方法研究
程晓懿 车辆工程
63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84
四轮独立驱动电动汽车转向稳定控制
第38卷第6期2021年6月控制理论与应用Control Theory&ApplicationsV ol.38No.6Jun.2021四轮独立驱动电动汽车转向稳定控制于树友1,2†,李文博2,刘艺2,4,陈虹2,3(1.吉林大学汽车仿真与控制国家重点实验室,吉林长春130012;2.吉林大学通信工程学院,吉林长春130012;3.同济大学新能源汽车工程中心,上海200092;4.北京华为数字技术有限公司,北京100095)摘要:四轮驱动电动汽车在中高速转向行驶过程中,轮胎的非线性特性会使得汽车出现大摆动、侧滑、过度或不足转向等安全问题.针对可能出现的问题,提出了四轮驱动电动汽车转向稳定分层控制策略.上层横摆稳定控制器采用基于图表的滑模控制算法规划出使车辆转向稳定的附加横摆力矩.下层转矩优化分配控制器采用模型预测控制方法实现4个轮胎的转矩分配,保证车辆转向行驶安全性.仿真结果表明所设计的控制策略能够有效保证车辆的稳定转向行驶.关键词:横摆稳定;分层控制;预测控制;滑模控制;图表引用格式:于树友,李文博,刘艺,等.四轮独立驱动电动汽车转向稳定控制.控制理论与应用,2021,38(6):719–730DOI:10.7641/CTA.2020.00506Steering stability control of four-wheel-drive electric vehicleYU Shu-you1,2†,LI Wen-bo2,LIU Yi2,4,CHEN Hong2,3(1.State Key Laboratory of Automotive Simulation and Control,Jilin University,Changchun Jilin130012,China;2.College of Communication Engineering,Jilin University,Changchun Jilin130012,China;3.New Energy Automotive Engineering Center,Tongji University,Shanghai200092,China;4.Beijing Huawei Digital Technologies Co.,Ltd.,Beijing100095,China)Abstract:When the four-wheel-drive electric vehicle steers at high speed,the nonlinear characteristics of tyre will make the vehicle to appear some instable problems such as overswing,sideslip,oversteering and understeering.In order to tackle these instable problems,a steering stable hierarchical control strategy for four-wheel-drive electric vehicles is proposed. The outer-layer map-based sliding mode control scheme is to produce additional yaw moments to stabilize the vehicle;the inner-layer torque model predictive control scheme is to implement the torque distribution of four tires.Simulation results show that the proposed control strategy can effectively ensure the stable steering of the vehicle.Key words:steering stability control;hierarchical control;model-predictive control;sliding-mode control;map Citation:YU Shuyou,LI Wenbo,LIU Yi,et al.Steering stability control of four-wheel-drive electric vehicle.Control Theory&Applications,2021,38(6):719–7301引言据统计,全球每年会有130万人在车辆交通事故中死亡,另外致使2000至5000万人受伤或残疾,因交通事故造成的经济损失高达5180亿美元[1–2].因此设计保证汽车行驶安全的控制策略至关重要.近年来,四轮驱动电动汽车以响应速度快、精度高、灵活机动、节能减排的特性受到人们的广泛关注[3].由于四轮独立驱动电动车每个车轮的驱动转矩独立可控,转矩分配的自由度增加,在理论上可依据不同的工况直接控制各轮的输出转矩,既可以避免车辆因转矩过大而对地滑转,又可以根据需求提供足够的驱动力[4].因此,四轮独立驱动车辆在操纵性和稳定性方面较传统驱动方式具有显著的优势,可有效减少车辆因失稳而发生的交通事故[5].文献[6]介绍了四轮驱动电动汽车转向机构的工作原理和结构特性,设计了驾驶员辅助系统,在紧急工况时利用模糊逻辑控收稿日期:2020−08−25;录用日期:2020−12−30.†通信作者.E-mail:**************.cn.本文责任编委:张承慧.国家自然科学基金项目(U1964202,61520106008),吉林省教育厅项目(1526982655808),工业物联网与网络化控制教育部重点实验室开放基金项目(2019FF01)资助.Supported by the National Natural Science Foundation of China(U1964202,61520106008),the Jilin Province Education Department(152698 2655808)and the Foundation of Key Laboratory of Industrial Internet of Things&Networked Control(2019FF01).720控制理论与应用第38卷制方法控制每个车轮的转矩以维持车辆的稳定性.文献[7]分析了车辆参数对车辆路径跟踪的影响,并利用可测得的反馈参数对车辆的路径和加速工况输出转矩进行控制.文献[8]利用主动前轮转向和主动后轮转向的变转矩分配控制提高车辆的操纵性和稳定性.此外,采用分层控制结构处理因轮胎滑移带来的转向稳定性问题受到了广泛关注.文献[9]在上层控制器中采用非线性三步法对车辆稳定转向时需要的附加横摆力矩进行规划,在下层控制器中根据车辆垂直载荷与质心到前轴距离以及质心到后轴距离的比例关系设计力矩分配算法,提高了车辆在低附着路面的行驶安全性.文献[10]在横摆力矩控制层设计了一种基于模糊控制的横摆力矩控制器以计算车身稳定控制所需的附加力矩.在力矩分配层设计了针对两轮独立驱动和四轮独立驱动两种不同驱动模式的力矩分配算法.文献[11]在横摆力矩控制层采用滑模控制确定附加横摆力矩,在力矩分配层设计了考虑车辆滑移率和驱动力约束的力矩优化分配策略,提高了车辆的稳定性,改善了车辆动力性能.针对系统中的非线性和不确定性,文献[12]提出一种基于多模型的预测控制策略,在紧急驾驶工况下,保证了车辆的稳定性.文献[13–15]采用整车横摆稳定和电机转矩分配一体化控制,直接选用4个车轮转矩为控制变量进行四轮轮毂电机独立转矩分配,保证了滑移率在稳定区间内,提高了车辆稳定性.但是其系统模型复杂,优化策略维度偏高,不利于工程实现.轮胎力学具有明显的非线性特性,对车辆动力学具有重要影响.文献[16]认为轮胎侧偏刚度不确定性在车辆稳定性控制问题中是一种扰动,利用鲁棒H∞输出反馈跟踪期望路径.文献[17]通过递推最小二乘估计方法来确定轮胎模型参数,并估计车辆的质心侧偏角.针对线控转向控制系统,文献[18]提出一种非线性自适应滑模策略,提高操纵稳定性的同时减少来自侧偏刚度不确定引起的抖动.文献[19–20]采用轮胎经验模型“魔术公式”对轮胎侧偏特性进行拟合,具有统一性强,拟合精度高的优势.但是参数变化对拟合的误差影响很大,且不能很好地拟合极小侧偏情况下的轮胎侧偏特型.本文设计四轮驱动电动汽车的转向稳定控制策略解决车辆转向时的安全问题,具有如下3点优势:1)采用双层控制结构,将横摆稳定控制和驱动转矩优化分配分开处理,这种方案解耦了横摆控制系统与驱动系统之间的动力学关系.相对于横摆稳定和转矩分配一体化控制结构,降低了整体优化策略的系统维度,降低了计算负担,提高了带约束的多目标优化控制的计算效率,更易于实现.2)上层横摆稳定控制采用包含图表的滑模控制方法.滑模控制能够克服系统不确定性,对干扰和未建模动态具有很强的鲁棒性.同时通过嵌入MAP数据表,降低了轮胎模型拟合难度,提高了模型精度.针对系统控制器设计过程中采用公式拟合方式建模及计算带来的控制器结构复杂问题及计算负担问题,本文使用查找MAP表方法提供了一种新的解决的方案.3)下层力矩分配控制采用滚动时域优化方法.滚动时域优化能够跟踪上层横摆稳定所需要的附加横摆力矩,显式处理轮胎纵向滑移率约束及电机转矩约束,优化电机转矩能耗,保证了电机能量消耗较小的同时维持车辆稳定行驶.本文的章节安排如下:第2节建立了车辆七自由度动力学模型,第3节介绍了总体控制方案并详细给出了上层横摆稳定控制以及下层转矩优化分配控制的设计过程,第4节给出了仿真结果.2车辆动力学模型为进行车辆稳定性分析,以及控制器性能的仿真验证,本文建立了包含车辆纵向、侧向、绕z轴的横摆运动以及4个车轮转动的七自由度车辆模型,如图1所示.七自由度车辆模型的动力学为[21]m(˙v x−v yγ)=F xfl+F xfr+F xrl+F xrr,m(˙v y+v xγ)=F yfl+F yfr+F yrl+F yrr,I z˙γ=(F yfl+F yfr)·l f−(F yrl+F yrr)·l r+12(F xfr−F xfl)·d+12(F xrr−F xrl)·d,J x i˙w x i=T e i−F x i R e,(1)式中:m为整车质量,v x与v y分别为整车纵向速度和侧向速度,γ为车辆横摆角速度,F x与F y分别为车轮所受的纵向力和侧向力(下标fl,fr,rl,rr分别表示左前、右前、左后、右后车轮),I z为车辆绕z轴的转动惯量,l f与l r分别为质心到前轴和后轴距离,R e为轮胎半径,T e i为i车轮驱动力矩,w x i为i车轮角速度,J x i为i 车轮绕驱动轴转动惯量(i为fl,fr,rl,rr).图1七自由度模型Fig.1Seven degree-of-freedom vehicle model第6期于树友等:四轮独立驱动电动汽车转向稳定控制7213四轮驱动电动汽车转向稳定控制3.1总体控制方案车辆在中高速行驶时,突然的换道超车以及路面的复杂附着条件都会影响车轮的侧偏特性,进而影响车辆的转向性能.图2给出了四轮驱动车辆的总体控制方案.图2四轮驱动车辆控制系统Fig.2Four-wheel-drive vehicle control system图2所示的总体控制方案可以分为3个子模块,即车辆行驶理想参考模块、横摆稳定控制模块、转矩分配模块.通过3个模块的协调配合,可以实现四轮驱动电动汽车的转向稳定控制.框图中:δf 为前轮转角,β∗和γ∗分别为理想质心侧偏角和理想横摆角速度,(κfl,κfr ,κrl ,κrr )为4个轮胎纵向滑移率,M x 为使车辆稳定的附加横摆力矩,(T efl,T efr ,T erl ,T err )为4个车轮驱动力矩.注1整车横摆稳定和电机转矩分配一体化控制主要针对系统轮胎非线性和存在的约束带来的挑战.采用分层控制策略,在关注上述挑战问题的同时,将横摆稳定控制和驱动转矩优化分配分开处理,这种方案能够解耦车辆横摆控制系统与驱动系统之间的动力学关系,降低整体优化策略的系统维度以减小计算负担,提高带约束的多目标优化控制的计算效率.注2如图2所示,四轮驱动车辆控制系统包含4个模块.车辆行驶理想参考模块的设计采用线性二自由度车辆模型.横摆稳定控制模块的设计采用忽略轮胎动力学的车身二自由度动力学模型,计算车身横摆稳定的附加横摆力矩.转矩分配模块的设计采用车轮旋转运动模型,合理分配4个车轮的驱动力矩,跟踪上层控制器规划出的期望附加横摆力.四轮驱动电动汽车模块采用七自由度车辆模型进行仿真验证.3.2理想参考模型理想参考模型要求能够准确的反映车辆理想转向过程,既要保证系统具有和传统前轮转向汽车相一致的转向灵敏度,又要保证车身具有良好的姿态.即:横摆角速度稳态增益和传统前轮转向汽车相同,质心侧偏角尽量减少到零.实验表明在正常车速和较小的转向角度下,二自由度车辆模型可用于分析四轮驱动电动汽车的转向稳定性[22–23].本文利用理想参考模型,计算出给定方向盘转角对应的理想质心侧偏角β∗和理想横摆角速度γ∗[24].为了建立线性二自由度车辆模型,需要忽略转向系统和悬架的影响;假设汽车只与地面平行恒速运动;假设汽车横向加速度小于0.4g;轮胎轮廓线工作在一个线性范围内;忽略空气阻力作用.在以上假设的前提下,根据牛顿第二定律推导出二自由度车辆模型的动力学方程mv x (˙β∗+γ∗)=−(C f +C r )β∗−l f C f −l r C r v xγ∗+C f δ∗f ,I z ˙γ∗=−(l f C f +l r C r )β∗−l 2f C f −l 2r C r v xγ∗+l f C f δ∗f ,(2)式中:C f 为前轴侧偏刚度,C r 为后轴侧偏刚度.选取质心侧偏角以及横摆角速度作为状态变量,即x =[β∗γ∗].选取前轮转角作为控制输入,即u =δ∗f .将式(2)写成标准状态空间形式{˙x =Ax +Bu,y =Cx,(3)其中:A = −(C f +C r )mv x l r C r −l f C f mv 2x −1l r C r −l f C f I z l 2f C f +l 2r C r I z v x,B = C f mv x l f C f I z,C =[1001].(4)3.3基于MAP 的滑模横摆稳定控制器选取侧向速度、纵向速度以及横摆角速度3个自由度参与横摆稳定控制器设计.质心侧偏角可以表达为β=v y /v x .假设车辆的纵向速度不变,那么车辆的质心侧偏角加速度可以表示为˙β=˙v y /v x .基于以上假设以及式(1)可以得到车辆质心侧偏角以及横摆角速度的微分方程[25]˙β=F yfl+F yfr +F yrl +F yrr mv x−γ,(5a)˙γ=l f (F yfl+F yfr )−l r (F yrl +F yrr )+M xI z,(5b)其中由4个车轮纵向力形成的附加横摆力矩M x =d2(F xfr −F xfl+F xrr −F xrl ).(6)车辆在转向行驶时,质心侧偏角能够体现车辆的行驶稳定性,横摆角速度能够体现车辆的操纵稳定性[26].因此若想保证车辆转向行驶时的稳定性,可以选取质心侧偏角以及横摆角速度作为联合控制目标.722控制理论与应用第38卷采用具有快速响应、对干扰和未建模动态具有强鲁棒性的滑模变结构控制器作为上层横摆稳定控制器.定义滑模切换函数[27]s=a(γ−γ∗)+b(β−β∗),(7)式中:a代表控制目标中横摆角速度所占权重系数,b代表质心侧偏角所占权重系数.权重系数选取首先需考虑参数数量级差异性,其次考虑仿真验证过程中系统受模型偏差、参数摄动以及外界扰动影响而存在的跟踪误差响应情况,最后通过试凑选取权重系数.对滑模切换函数s微分可得˙s=a(˙γ−˙γ∗)+b(˙β−˙β∗),(8)其中˙γ∗和˙β∗表示的是目标横摆角速度和质心侧偏角的微分,整理可得˙γ=1a[˙s−b(˙β−˙β∗)]+˙γ∗.(9)由式(5)和式(9)可得总的横摆力矩M=I z˙γ=I z{1a[˙s−b(˙β−˙β∗)]+˙γ∗}.(10)选取指数趋近律[28]˙s=−k1·sgn s−k2s,(11)式中:sgn为符号判断函数,k1和k2为正的常数,k1的值能够体现系统状态被滑模控制迫使向滑模面s=0运动的趋近速度,k2的大小能够体现系统状态到达滑模面后向平衡点运动的收敛速度,两者的值可以通过试凑的方式选取.为了消除滑模控制中sgn s不连续性导致的控制系统抖振,将其用饱和函数sat(s/c)进行替换,其中c为代表滑模面s=0周围的边界层厚度的正常数.定义Lyapunov函数V=12s2,则˙V=s(−k1sgn s−k2s)=−k1sgn s·s−k2s2,其中sgn s·s非负,所设计的滑模控制器满足全局可达性条件s˙s 0.因此横摆稳定控制系统可以按照本文设计趋近律从任意状态运动到滑动模态并收敛至平衡点.由式(11)可得期望附加横摆力矩M x=M−M y=I za[−k1·sgn s−k2s−b(˙β−˙β∗)]+I z˙γ∗−M y,(12)其中M y为轮胎侧向力产生的横摆力矩:M y=l f(F yfl+F yfr)−(F yrl+F yrr)l r.(13)通过观察式(13)可知,轮胎侧向力产生的横摆力矩M y受限于侧向力的精度.由于采用传统“魔术公式”描述的轮胎侧向力与侧偏角的关系时近似的精度会受到模型参数的严重影响,本文拟采用车辆动力学仿真软件CarSim中提取出的轮胎侧向力与侧偏角数据,建立轮胎侧向力MAP表.MAP表一方面能够反映真实情况下轮胎侧向力和侧偏角的关系,充分表征轮胎的非线性特性;另一方面由于MAP表的特殊形式将复杂的式变成了“一一对应”的关系,在不失非线性的情况下简化了计算的复杂度、且占用存储空间相对较小,有利于工程实现.当垂向载荷为4780N时,在CarSim中提取车辆轮胎侧向力与侧偏角对应关系如图3所示.图3轮胎侧向力侧偏角曲线Fig.3Tyre lateral force-slip angle curve通过提取的数据关系建立MAP数据表,采用哈希查表方法[29]得到轮胎侧向力进而通过式(13)得到横摆力矩M y.3.4基于滚动时域的转矩优化控制器四轮独立驱动电动汽车的控制目的是在转向时保持良好的操纵性和稳定性.上层横摆稳定控制通过对车辆参考状态(β∗,γ∗)的跟踪计算得到期望附加横摆转矩M x,但它不能直接作用到车辆上.本文在下层控制策略中采用基于滚动时域的转矩优化控制器.滚动时域方法可以显式处理约束条件,并充分考虑不确定性对系统的影响,始终保持最优控制.通过合理分配4个车轮的驱动力矩,使得车辆在转向行驶时能够跟踪上层控制器规划出的期望附加横摆力矩M x,实现车辆的稳定转向行驶.假设车轮旋转中心的线速度与车辆质心纵向速度相等.根据轮胎纵向特性,每个车轮纵向滑移率为[30]κi=w x i R e−v xv x,i=fl,fr,rl,rr.(14)假设车辆的静态质量m平均分配到4个车轮上.单个车轮的旋转动力学方程为14m˙v x=F x i,(15a)J x i˙w x i=T e i−F x i R e.(15b)轮胎纵向滑移率动态方程为˙κi=˙w x i R e v x−w x i R e˙v xv2x.(16)将式(14)及式(15)代入至式(16)可得第6期于树友等:四轮独立驱动电动汽车转向稳定控制723˙κi =(−R 2e J x i v x −4κi +1mv x )F x i +R eJ x i v xT e i .(17)轮胎纵向力主要由垂向载荷和纵向滑移率决定.假设轮胎垂向载荷为定值,将轮胎纵向力简化为[31]F x i =C ki κi ,(18)式中C ki 为轮胎纵向刚度.相应地,轮胎纵向滑移率的动态特性可简化为˙κi =(−R 2e J x i v x −4κi +1mv x )C ki κi +R eJ x i v xT e i .(19)选择体现轮胎驱动特性的轮胎纵向滑移率为系统状态x =[κflκfr κrl κrr ]T ,4个车轮的驱动力矩为系统输入u =[T eflT efr T erl T err ]T ,由纵向力产生的车辆附加横摆力矩为系统输出y =M zx .˙x =(−R 2e J x i v x −4x +1mv x )·C k x +R e J x i v xu,y =Cx,(20)式中C k =diag {C kfl,C kfr ,C krl ,C krr },系统输出矩阵C =d2[−C kflC kfr −C krl C krr ].将式(20)状态方程简写为˙x =g (·,·)形式,其离散模型可描述为x (k +1)=g (x (k ),u (k ))·T s +x (k ),y (k )=C ·x (k ).(21)式中:T s 表示定步长采样时间间隔,k 表示采样时刻.为了保证横摆稳定的同时避免车辆因轮胎滑移带来的行驶稳定性问题,对轮胎纵向滑移率的约束为−κmax κ κmax ,(22)式中κmax 为轮胎纵向滑移率安全范围边界值.记m 0为控制时域,选择预测时域p =m 0.在k 时刻,优化问题形式如下:minimize U (k )J mpc (x (k ),U (k ),m 0),(23a)满足系统动力学如式(21)所示,以及时域约束−T e max T e i (k +j |k ) T e max ,−κmax κi (k +j +1|k ) κmax ,(23b)其中:j =0,1,···,m 0−1,T e max 为电机最大输出转矩,J mpc (x (k ),U (k ),m 0)=∥Γy (Y (k +1|k )−M x (k +1))∥2+∥Γu U (k )∥2,其中Γy 和Γu 是正定加权矩阵,给定为Γy =diag {Γy ,1,Γy ,2,···,Γy ,m 0},Γy ∈R m 0×m 0,Γu =diag {Γu ,1,Γu ,2,···,Γu ,m 0},Γu ∈R m 0×m 0,U (k )是控制变量序列,Y (k +1|k )是k 时刻基于模型(21)预测的m 0步输出.优化问题(23)不仅要求对期望附加横摆力矩M x 的跟踪,而且在保证车辆稳定的情况下,要求尽可能减小能量消耗.记在k 时刻优化问题(23)的解为U ∗(k ),给出四轮驱动电动汽车转向稳定控制算法如下所示:优化算法四轮驱动电动汽车转向稳定控制.1)初始化:k =0,设定预测时域与控制时域.2)while k <T final (T final 为系统仿真时间).3)测量系统状态β,γ;κfl,κfr ,κrl ,κrr .4)根据理想参考模型,由上层横摆稳定控制器计算期望附加横摆力矩M x (k +1).5)下层滚动时域转矩优化控制器求解优化问题(23),获得可行解U ∗(k ).6)将u (k )=[10···0]U ∗(k )作用于系统.7)k ←k +18)end while4仿真验证为了验证四轮驱动电动汽车转向稳定控制策略的控制效果,利用MATLAB/Simulink 进行动态仿真实验,采用的车辆参数和控制器参数分别如表1和表2所示[30].表1车辆模型参数Table 1The parameters of vehicle model符号参数含义数值m 整车质量1530kg l r 质心至后轴距离 1.67m l f 质心至前轴距离 1.11m d 左右车轮距离 1.55m J x i 车轮转动惯量0.9kg ·m 2I z 整车横摆转动惯量2315.3kg ·m 2C f 前轴轮胎侧偏刚度67262N /rad C r 后轴轮胎侧偏刚度67262N /rad L 轴距 2.78m R e 车轮滚动半径0.325m v x 纵向速度20m/s C ki轮胎纵向刚度系数12752N表2控制器参数Table 2The parameters of controller符号参数含义数值T e max 电机最大输出转矩180Nm κmax 轮胎纵向滑移率安全范围边界值0.08p 预测时域3T s采样时间间隔0.01s724控制理论与应用第38卷4.1方向盘角阶跃实验仿真工况设置:车速为72km/h,方向盘转角输入幅值为0.035rad,起跃时间为1s 的角阶跃信号.假设路面平坦没有坡度,路面与地面附着系数为0.8.将MPC 转矩优化分配控制效果与文献[9]中比例力矩分配控制进行对比,仿真结果如图4–8所示.图4方向盘转角输入Fig.4Steering angleinput图5横摆角速度Fig.5Yaw rateresponses图6质心侧偏角Fig.6Slip angleresponses(a)左前轮滑移率(b)右前轮滑移率(c)左后轮滑移率(d)右后轮滑移率图7轮胎纵向滑移率Fig.7Wheel slip ratio responses第6期于树友等:四轮独立驱动电动汽车转向稳定控制725(a)左前轮力矩(b)右前轮力矩(c)左后轮力矩(d)右后轮力矩图8驱动力矩Fig.8Drive torque responses图5和图6分别为车辆横摆角速度和质心侧偏角响应仿真对比结果.其中虚线为理想横摆角速度/质心侧偏角曲线,实线为MPC 转矩优化分配控制车辆横摆角速度/质心侧偏角响应,点虚线为比例力矩分配控制车辆横摆角速度/质心侧偏角响应.在控制策略作用下,电动汽车能够有效的补偿维持上层横摆稳定所需要的附加横摆力矩,即体现车辆稳定性的质心侧偏角以及体现车辆操纵稳定性的横摆角速度能够很好的跟踪理想参考值,车辆能够平稳安全转向.相比于比例控制力矩分配,MPC 转矩优化分配控制下车辆跟踪效果有所提升,尤其是体现车辆稳定性的质心侧偏角,其精度较比例力矩分配控制下的质心侧偏角提升了15%左右.仿真结果表明MPC 转矩优化分配控制在维持车辆转向稳定性方面更有效,性能更佳.图7和图8分别为MPC 转矩优化分配控制与比例力矩分配控制下的轮胎纵向滑移率与电机转矩输入对比结果.其中实线为MPC 转矩优化分配控制车辆纵向滑移率/力矩响应,虚线为比例力矩分配控制车辆纵向滑移率/力矩响应.由图7和图8可知,所设计控制策略均能够将轮胎滑移率限定在0.008内.相比于比例控制力矩分配,MPC 转矩优化分配控制下的车辆驱动力矩整体上有所降低.仿真结果表明MPC 能够将轮胎滑移率限定在约束范围内,有效的防止车辆轮胎出现打滑的情况.同时由于在MPC 转矩优化分配控制设计时,考虑了能量消耗因素,因此较比例控制分配的4个轮胎力矩总体上大幅度下降,这验证了MPC 转矩优化分配控制能够在消耗较小能量的同时维持车辆的转向稳定行驶,体现了MPC 转矩优化分配控制器的优越性.4.2方向盘连续正弦试验方向盘连续正弦试验是让汽车连续地进行移线行驶,通过观测汽车的质心侧偏角、横摆角速度、侧向位移等数据来对汽车的操纵稳定性以及安全性进行客观评价.4.2.1方向盘连续正弦试验1仿真工况设置:车速为72km/h,方向盘转角输入角频率为1.57rad/s,幅值为0.035rad 的正弦信号,仿真结果如图9–13所示.图9方向盘转角输入Fig.9Steering angle input726控制理论与应用第38卷图10横摆角速度Fig.10Yaw rateresponses图11质心侧偏角Fig.11Slip angleresponses(a)左前轮滑移率(b)右前轮滑移率(c)左后轮滑移率(d)右后轮滑移率图12轮胎纵向滑移率Fig.12Wheel slip ratioresponses(a)左前轮力矩(b)右前轮力矩第6期于树友等:四轮独立驱动电动汽车转向稳定控制727(c)左后轮力矩(d)右后轮力矩图13驱动力矩Fig.13Drive torque responses图10和图11分别为车辆横摆角速度和质心侧偏角响应仿真对比结果.其中虚线为理想横摆角速度/质心侧偏角曲线,实线为MPC 转矩优化分配控制车辆横摆角速度/质心侧偏角响应,点虚线为比例力矩分配控制车辆横摆角速度/质心侧偏角响应.图12和图13分别为MPC 转矩优化分配控制与比例力矩分配控制下的轮胎纵向滑移率与电机转矩输入对比结果.其中实线为MPC 转矩优化分配控制车辆纵向滑移率/力矩响应,虚线为比例力矩分配控制车辆纵向滑移率/力矩响应.仿真结果表明体现车辆稳定性的质心侧偏角以及体现车辆操纵稳定性的横摆角速度能够很好的跟踪理想参考,即MPC 转矩优化分配控制与比例力矩分配控制器均能够有效的补偿维持上层横摆稳定所需要的附加横摆力矩,车辆能够平稳安全转向.由图13可知,相比于比例控制器,MPC 控制力矩分配控制策略的电机转矩分配降低了能量损耗.4.2.2方向盘连续正弦试验2仿真工况设置:车速为72km/h,方向盘转角输入角频率为1.57rad/s,幅值为0.0525rad 的正弦信号,仿真结果如图14–18所示.图14方向盘转角输入Fig.14Steering angleinput图15横摆角速度Fig.15Yaw rateresponses图16质心侧偏角Fig.16Slip angleresponses(a)左前轮滑移率728控制理论与应用第38卷(b)右前轮滑移率(c)左后轮滑移率(d)右后轮滑移率图17轮胎纵向滑移率Fig.17Wheel slip ratioresponses(a)左前轮力矩(b)右前轮力矩(c)左后轮力矩(d)右后轮力矩图18驱动力矩Fig.18Drive torque responses图15和图16分别为车辆横摆角速度和质心侧偏角响应仿真对比结果.其中虚线为理想横摆角速度/质心侧偏角曲线,实线为MPC 转矩优化分配控制车辆横摆角速度/质心侧偏角响应,点虚线为比例力矩分配控制车辆横摆角速度/质心侧偏角响应.图17和图18分别为MPC 转矩优化分配控制与比例力矩分配控制下的轮胎纵向滑移率与电机转矩输入对比结果.其中实线为MPC 转矩优化分配控制车辆纵向滑移率/力矩响应,虚线为比例力矩分配控制车辆纵向滑移率/力矩响应.。
基于非线性MPC的电动赛车驱动防滑控制
基于非线性MPC的电动赛车驱动防滑控制
吴勃夫;徐晓;陈自强;孙亮;吴姚烨
【期刊名称】《合肥工业大学学报(自然科学版)》
【年(卷),期】2024(47)2
【摘要】文章采用非线性模型预测控制(model predictive control,MPC)方法实现轮边驱动电动赛车的驱动防滑控制。
为了实现电动赛车良好的纵向加速和轮胎抓地性能,将车轮滑移稳定区作为非线性模型预测时域约束,建立轮边电机滑移率控制模型;结合赛车空气动力学套件和轮胎特性,在MATLAB/Simulink软件中建立驱动防滑模型成本函数来平衡目标滑移率、目标扭矩变化率和最大扭矩限制等多个目标;通过CarSim和MATLAB/Simulink的联合仿真并结合半实物在环台架试验验证模型的有效性和可靠性。
联合仿真和试验验证结果表明,该文方法可以有效地提升赛车的纵向性能。
【总页数】7页(P182-188)
【作者】吴勃夫;徐晓;陈自强;孙亮;吴姚烨
【作者单位】合肥工业大学汽车与交通工程学院
【正文语种】中文
【中图分类】U461.6
【相关文献】
1.基于路面识别的四轮驱动电动汽车驱动防滑控制
2.基于非线性模型预测控制的轮边电驱动客车驱动防滑研究
3.基于路面识别的四轮驱动电动汽车驱动防滑控制
4.
基于非线性MPC的分布式驱动电动汽车转矩协调控制5.基于MPC的独立驱动电动汽车稳定性集成控制
因版权原因,仅展示原文概要,查看原文内容请购买。
分布式驱动电动汽车驱动转矩协调控制
最优滑转率 , 因此根据 经验将 最优 滑转 率设 置 为 2 %。考虑到车辆低速 时, 0 轮速信号毛刺较大 , 容易
出现错 误进 入 的情况 , 设定 门限值 为一 较 高定值 , 而在 车速 稍高 时 , 设定 随车速增 加 而增加 , 即
b T b f1 f b r b r
,
轮驱 动转 矩进 行协 调控 制 以改善 车 辆状 态 的 问题 尚
1 驱动转矩协 调控制方法
分 布 式驱 动 电动汽车 驱动 转矩 协调 控制 系 统 的 输入 为转 矩分 配层 制定 的各 轮纵 向需求驱 动 转矩 ( =12,,, i , 34 分别 指左 前 轮 、 右前 轮 、 后 轮和 右后 左 轮 ) 同时系统 采集 车 辆状 态 观 测 系统 测 量 到 的 车 。
汽
车
工
程
21 年 ( 3 卷 ) 3 02 第 4 第 期
Au o t g n e ig t moi En i e rn ve
2 23 01 0 7
分 布 式 驱 动 电动 汽 车驱 动转 矩 协 调 控 制 术
褚 文博 , 罗禹贡 , 赵 峰, 李克 强
10 8 ) 0 04 ( 清华大学, 车安全与节能 国家重点 实验 室, 汽 北京
分布 式 驱动 电动汽 车驱 动转 矩分 配
…
~
登 磐 氅 . ….
;
.
滑工 转况
状塑曼l控 豳圈 圈 圆 态与 滑 ▲测l 制 观 ^防 量 测
… … …
驾驶员操作 ll
多轮独 立 电驱 动车辆
:
协调控 制 方案
— l控l 调制; l 制 l控l 协 调 协
多轴轮毂电机驱动电动车电子差速控制研究
多轴轮毂电机驱动电动车电子差速控制研究靳立强; 田端洋; 宋琪【期刊名称】《《重庆交通大学学报(自然科学版)》》【年(卷),期】2019(038)012【总页数】10页(P123-132)【关键词】车辆工程; 电子差速; 轮毂电机驱动; 多轴车辆; 动力学仿真【作者】靳立强; 田端洋; 宋琪【作者单位】吉林大学汽车工程学院吉林长春130025【正文语种】中文【中图分类】U469.720 引言轮毂电机独立驱动的车辆,由于其省去了传统车辆的传动系统,同时每个车轮的驱动力矩独立可控、能实时准确反馈转矩转速等信息,使得整车传动效率大大提高,布置设计更为灵活,在稳定性、主动安全控制和节能方面比传统车辆更具显著的控制优势[1-2]。
轮毂电机驱动车辆的电子差速器主要是为了代替传统车辆的机械式差速器,通过协调各驱动电机,保证车辆行驶时的操纵稳定性,它是轮毂电机驱动车辆必须解决的关键技术之一。
对电子差速控制的研究,学界主要有3个方面:对电机转速控制、对电机转矩控制、改变电机结构。
翟丽等[3]所研制的“E-to uring Car”电动游览车,根据阿克曼转向定理估算出各车轮理论轮速,从而完成闭环控制;F.J.PEREZ-PINAL等[4]利用建立参考模型方法,计算得到各车轮转速;LEE Ju-sang等[5]通过神经网络拟合转向时车轮转角及轮速关系,对车轮转速进行控制;何仁等[6]根提出一种基于车轮滑转率的模糊PID控制方法,对电驱动桥客车左右轮进行转速协调控制。
这些研究都是基于不同的模型算法,目的是得到车轮期望转速,从而对各驱动电机进行转速控制。
单一转速控制对电机要求很高,同时不能适应路面不平或车轮滚动半径不等及车辆高速行驶时非线性动力学导致的差速问题。
吴浩[7]以目标滑转率为控制目标,利用鲁棒控制器得到各轮的驱动转矩;张慧慧[8]和赵艳娥等[9]分别以轮胎滑移率为控制目标,采用滑膜控制,对两侧车轮转矩进行分配;葛英辉等[10]采用比例控制方法,利用可获得的信息估算出路面附着及车轮滑转率,进而完成驱动轮期望滑转率的计算,对各车轮驱动转矩进行再分配,实现差速控制的目的。
分布式驱动电动汽车操纵稳定性控制评价体系
分布式驱动电动汽车操纵稳定性控制评价体系余卓平;肖振宇;冷搏;王竑博;熊璐【摘要】Based on features of distributed drive electric vehicle dynamic control system, an objective evaluation system for dynamic control systems of distributed drive electric vehicles was established. The evaluation system consists of performance evaluation parameters, evaluation methods and marking criteria. Performance evaluation was conducted in aspects of the vehicle and the dynamics control. Vehicle handling stability tests were carried out to assess a vehicle stability controller with the proposed evaluation system and to verify rationality and feasi-bility of the evaluation system itself.%基于分布式驱动电动车动力学控制系统的特点,设计了一套客观评价体系,用于评价分布式驱动电动车动力学控制系统的性能.评价体系包括性能评价项目、评价方法和评分准则3个方面.性能评价项目涵盖整车层面和动力学控制系统层面.利用提出的评价体系对搭载动力学控制的车辆进行了操纵稳定性试验评价,验证了评价体系的合理性和可行性.【期刊名称】《华东交通大学学报》【年(卷),期】2016(033)005【总页数】8页(P25-32)【关键词】操纵稳定性;评价体系;车辆动力学控制;分布式驱动电动汽车【作者】余卓平;肖振宇;冷搏;王竑博;熊璐【作者单位】同济大学中德学院,上海 200092;同济大学汽车学院,上海 201804;同济大学中德学院,上海 200092;同济大学汽车学院,上海 201804;同济大学汽车学院,上海 201804;同济大学汽车学院,上海 201804【正文语种】中文【中图分类】U461;U467.1分布式驱动电动车具有各轮独立驱动且驱动力矩可控等特点,其动力学控制方法一直是各大企业及高校研究的焦点[1]。
轮毂电机电动汽车纵向车速估计方法

03
纵向车速估计方法
基于车辆动力学模型的方法
总结词
该方法通过建立车辆动力学模型,利用车辆的运动状态和参数来估计车速。
详细描述
基于车辆动力学模型的方法利用车辆的运动方程和参数来估计车速。这种方法 需要精确的车辆参数和复杂的模型,但能够提供较高的估计精度。常用的动力 学模型包括纵向动力学模型和轮胎动力学模型。
实验过程与数据采集
实验过程
在各种路况下进行实际驾驶,记录车 辆的纵向速度、加速度、角速度等数 据。
数据采集
使用传感器采集数据,并实时传输到 计算机进行存储和分析。
实验结果与分析
结果
通过对比实际速度与估计速度,得到 纵向车速估计误差曲线和统计数据。
分析
分析误差产生的原因,提出改进方法 ,优化纵向车速估计算法。
研究不足与展望
目前的研究主要集中在特定工况下的速度估计,对于复杂道路和多变工况下的性能表现仍需进一步验 证。
现有方法对于电机特性和车轮转速的依赖较强,对于不同类型和品牌的轮毂电机电动汽车,其适用性和 通用性有待提高。
未来的研究可以探索更加智能的速度估计方法,如基于人工智能和机器学习的技术,以提高速度估计的 精度和鲁棒性,并适应更加复杂的道路和驾驶环境。
轮毂电机在车辆行驶时,根据车辆的行驶状态和驾驶员的加 速踏板信号,通过电子控制系统调节电机的转速和转矩,实 现车辆的加速、减速和制动等操作。
电子控制系统是轮毂电机电动汽车的核心部分,负责接收驾 驶员的加速踏板信号和其他传感器信号,根据控制算法计算 出电机的控制量,实现对电机的精确控制。
轮毂电机电动汽车特点
研究内容和方法
本研究旨在提出一种高精度、高鲁棒性 的轮毂电机电动汽车纵向车速估计方法 。
四轮轮毂电机驱动电动汽车扭矩分配控制
收稿日期 : 2006- 12- 07 作者简介 : 余卓平 ( 1961 ) ) , 男, 教授 , 博士生导师 , 工学博士 , 主要研究方向为电动汽车系统动力学及控制. E 2mail: yuzhuoping@fcv 2 sh. com
1116
同 济 大 学 学 报( 自 然 科 学 版)
第 36 卷
摘要 : 根据四轮轮毂电机驱动电动汽车驱动 / 制动力矩独立可控的 特点 , 采用层次化 结构的控 制分配方法 , 优化 分 配驱 / 制动扭矩来提高车辆的操纵稳定性 . 控制器由运动控制器和控制分配器组成 , 其中运 动控制器 根据车辆状 态 产生所需总横摆力矩 , 控制分配器优化分配各轮 上的驱 / 制动扭 矩 , 同 时考虑 了各种 执行器 的约束 条件 . 仿真结 果 表明 : 采用层次化结构的控制分配方法充分利用了垂直载 荷较大的轮胎摩擦圆 , 降 低了总的轮 胎利用率 , 提高车 辆 的操纵稳定性 . 与平均分配的方法相比 , 稳定性控制效果更佳 . 关键词 : 电动汽车 ; 四轮驱动 ; 轮毂电机 ; 直接横摆力矩控制 ; 控制 分配 中图分类号 : U 461. 6 文献标识码 : A 文章编号 : 0253- 374X( 2008) 08- 1115- 05
基于纵向力分配的轮边驱动电动汽车稳定性控制
的分 配控 制方 法 . 献 [3 轮 边 驱动 电动 汽 车 的纵 文 8对 向力 控 制 分 配 进 行 了仿 真 研 究 , 显示 了分 配 控 制 算
cnrl p rahw sit d cd T ru hteWe曲 t  ̄ s- o t poc a r ue . hog h i e L at oa no d
X O GL I N u,Y h o i g J NG W i JA G Z o  ̄ UZ u p n , I A e , I N ay n
( olg fA tmoieSu i , o gi nvri ,h n hi 0 8 4 C l eo uo t tde T n j U iest S a g a 2 10 , e v s y
M a .2 1 r 00
文 章 编 号 : 2 33 4 (0 0 0 —4 70 0 5 —7 X 2 1 ) 30 1 —5
D I1 .9 9 ji n 0 5 —7 x 2 1 .3 0 9 O :0 3 6 /. s. 2 33 4 .0驱 动 电动 汽 车 稳 定 性 控 制
纯电动汽车 (V 都是各 大汽车公司研发的重点 . E) 电
动 汽车在 驱 动形 式和 控制 方式 上 与 传 统 内燃 机 汽 车
有 很 大 区别 . 于 轮 毂 电机 驱 动 的 四轮 驱 动 电动 汽 对
车来 说 , 多执 行器 是其 具有 的独 特优 势 , 个 电机 的 各
扭矩 可 以独立 、 确地 加 以控 制 , 稳定 性 控 制 带来 精 为 更 多 自由度 .
分配广 义 逆法 ( P ) 层 叠 广 义 逆 法 ( G ) R I、 C I 和加 权 最
h s b e f ci ey d srb t d a c r ig t e sa u f e c a e n e f tv l itiu e c o d n o t t t s o a h e h
分布式驱动电动汽车稳定性控制仿真与试验
分布式驱动电动汽车稳定性控制仿真与试验刘志强;刘广【摘要】为提高电动汽车的操纵稳定性,建立了3层的控制策略.动力学建模层计算变量实际值和期望值;补偿力矩确定层结合可拓控制与滑模控制的优势,建立自适应滑模算法,协调各参数控制的权重并确定合适的补偿力矩;车轮转矩分配层对补偿力矩提供约束后将其分配给4个轮毂电机.采用Carsim和Simulink软件进行模型搭建和联合仿真.仿真结果表明,整车控制策略的实时性和自适应性好.最后,在样车上进行快速原型试验也验证了所采用的控制策略达到了改善车辆稳定性的预期目标.【期刊名称】《汽车工程》【年(卷),期】2019(041)007【总页数】8页(P792-799)【关键词】分布式驱动电动汽车;可拓控制;滑模控制;联合仿真;实车试验【作者】刘志强;刘广【作者单位】长沙理工大学汽车与机械工程学院,长沙410114;长沙理工大学汽车与机械工程学院,长沙410114【正文语种】中文前言日渐严重的生态污染与能源枯竭问题,加速了分布式电驱动汽车的研究进展[1]。
相比于内燃机车辆,此类汽车取消了冗长的传动链,直接将控制施加在各车轮处,为动力学控制带来了新的实现方式。
在新能源车辆操纵稳定性的研究领域,各国高校和企业已经开展了诸多研究。
文献[2]中综述了分布式电驱动汽车动力学控制的关键问题,通过对比分析指出滑模变结构控制器有良好的鲁棒性和控制效果,应用时要注意其抖动现象。
文献[3]中应用增益比例调节算法来确定补偿力矩。
这种控制方式计算和调整方便,但当路面附着情况改变时自适应能力下降,控制效果不理想。
文献[4]~文献[7]中的补偿力矩由设计的模糊算法得到,再通过具体驱动力分配方式将之分配给4个车轮以达到提高车辆稳定性的目的,此类控制方法易于实现但车辆转向角过大时无法满足稳定性要求。
文献[8]中的稳定性控制器以二次最优模型为基础,加入前馈和反馈因子,然后通过试验对算法进行了验证,此方法适用于一般工况,复杂工况下的实时性有待提高。
分布式驱动电动汽车直驶稳定性的仿真分析
式中,取 umax=120,经计算可求得单个电机功率需满足 Pe跃4.69kW。
根据爬坡度来确定轮毂电机的功率,电机功率需满足 车辆能以 40km/h 的车速在坡度为 30%(大约 16.7毅)的良 好路面爬坡,可知:
进行解剖做 X 射线探伤,探伤显示缩松尺寸在 椎3mm 以 内,完全符合客户的缩松要求。
图 2 质心侧偏角 图 3 横摆角速度
(8)
1.2 速度控制模型 在 Carsim 自带的驾驶员轨迹跟踪模型的前提下,用 Simulink 搭建出电动汽车的车速控制模型(如图 1 所示)。 2 仿真分析 设置目标车速在 5 秒内由 5km/h 直线增加到 55km/h, 并假定各轮毂电机响应完全一致、忽略定位参数误差和侧 向风等因素,通过驾驶员速度跟踪模型得到车辆行驶所需 总期望驱动力矩,并采用平均分配规则分配到各驱动轮轮 毂电机。 对前驱、后驱和四驱三种驱动方式在低附着系数路面 上进行仿真分析,得到的车辆质心侧偏角、横摆角速度、侧
(7)
式中,To 为轮毂电机模型实际输出的力矩;Tox 为轮 毂电机模型的期望输出转矩即控制器输出给电机模型的 输入量;孜 为电机参数常量,具体数值由电机特性决定。
建立电机模型时,将通过传递函数得到的实际电机输 出转矩与当前车轮转速下对应的峰值转矩作比较,如峰值 转矩数值更大则输出传递函数计算得到的驱动转矩,反之 则输出当前转速对应的电机峰值转矩。电机模型峰值转矩 限制如下:
关键词院直驶稳定性曰附着系数曰仿真验证
0 引言 轮毂电机是将电机与轮毂做成一体,不仅省略了传统 汽车的变速器、差速器、万向节等传动装置,还减小了车辆 传动系统的空间。汽车领域将轮毂电机称之为电动汽车的 最终驱动形式[1]。传统机械传动系统的省略使得整车质量 大大降低,且轮毂电机具有转矩独立可控、响应速度快、控 制精确等优点,易于实现电动汽车的主动安全控制[2]。山东 大学针对四轮独立驱动/四轮独立转向电动车展开驱动防 滑 研 究 ,提出“主 动 前 后 轮 转 向 、直 接 横 摆 力 矩 ”的 横 摆 稳 定性集成控制方法,并对于路面利用附着系数实时估计方 法进行了探索[3]。驱动电动汽车作为纯电动汽车的一种,实 现了汽车底盘的电子化和主动化,提高了纯电动汽车的控 制性能。 1 车辆模型 本文使用了 CarSim 和 MATLAB/Simulink 建立模型, 其中车辆模型、路面模型都是在 CarSim 软件中搭建,电机 模型,驾驶员车速控制模型等都是在 MATLAB/Simulink 中 建立的。 要要要要要要要要要要要要要要要要要要要要要要要
电动汽车扭转梁式轮边驱动系统[实用新型专利]
![电动汽车扭转梁式轮边驱动系统[实用新型专利]](https://img.taocdn.com/s3/m/8b750b3976a20029bc642dda.png)
专利名称:电动汽车扭转梁式轮边驱动系统专利类型:实用新型专利
发明人:赵琦,时培成,王晨
申请号:CN201721122871.6
申请日:20170904
公开号:CN207190782U
公开日:
20180406
专利内容由知识产权出版社提供
摘要:本实用新型揭示了一种电动汽车扭转梁式轮边驱动系统,包括扭力梁、对称安装在扭力梁两端的电机,所述电机通过减速器与轮毂相连接,所述的电机的定子外缠绕有电机冷却管路,所述的扭力梁两端设有纵向延伸的支撑体,所述的支撑体一端内侧与电机外壳固接,外侧与减速器外壳固接,另一端设有扭力梁与车体安装孔,所述的电机外壳上设有由支撑体延伸出的减震器安装座及电机冷却管路输入输出端口。
本实用新型将扭转梁式驱动桥和轮边减速器电动轮融合构成电动汽车轮边驱动系统,不仅能够满足家用小型电动汽车正常动力性需求,且降低了整车质量,可实现车辆的轻量化;设计传动比大,机械传递效率高,减少了动能损失,有效果节约了能源。
申请人:安徽工程大学
地址:241000 安徽省芜湖市鸠江区北京中路8号
国籍:CN
代理机构:芜湖安汇知识产权代理有限公司
代理人:朱圣荣
更多信息请下载全文后查看。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第38卷第3期2010年3月同济大学学报(自然科学版)JO URNAL OF TON GJI UNIVERSITY(NATURAL SCIEN CE)Vol.38No .3 Mar.2010文章编号:0253-374X(2010)03-0417-05DO I :10.3969/j.issn.0253-374x.2010.03.019收稿日期:2009-03-24基金项目:国家/八六三0高技术研究发展计划资助项目(2006AA11A101);上海市优秀学科带头人计划资助项目(08XD14043)作者简介:熊 璐(1978)),男,讲师,工学博士,主要研究方向为汽车系统动力学与控制.E -mail:xiong_lu@基于纵向力分配的轮边驱动电动汽车稳定性控制熊 璐,余卓平,姜 炜,蒋造云(同济大学汽车学院,上海201804)摘要:采用层次化整车稳定性控制方法和加权二乘法优化分配算法,通过纵向力在约束范围内的合理分配形成直接横摆力矩,改善车辆的行驶姿态.实车试验结果显示,控制器根据各轮状态实现了四轮纵向力有效分配,车辆横摆角速度能够很好地跟踪参考横摆角速度;通过控制,降低了车辆横摆角速度与侧向加速度,提高了车辆的操纵稳定性.关键词:四驱电动汽车;稳定性控制;纵向力分配;控制分配;加权最小二乘法中图分类号:U 461.6文献标识码:ARe search on V ehicle Stability Control of 4WD Electric V ehicle Base d on Longitudinal Force Control AllocationXIONG Lu ,YU Zhuopin g,JIANG Wei ,JIANG Zaoyun(C ollege o f Auto motive Studies,Tongji University,Sha nghai 201804,C hina)Abstract :A vehicle stability control based on hierarc hica l c ontrol approach was introduced.Through the Weighted Lea s-t Squares (WLS)control allocation a lgorithm,the longitudina l force of ea ch tire (m otor torque)was distributed c onsidering the constraints to form the direct ya w m om ent.The experiment results show the respec tive longitudinal force of the four wheels has been effectively distributed ac cording to the status of eac h wheel.And a lso the vehic le .s yaw rate can follow the reference yaw rate exc ellently.The vehic le .s yaw rate a nd latera l a cceleration ha ve been reduced,meanwhile,the vehic le handling a nd stability have been enhanc ed instead.Key word s :4WD elec tric vehicle;stability control;longitudinal force distribut ion;control a lloc ation;weighted least -squares (WLS)汽车电动化是汽车驱动系统的发展趋势,混合动力电动汽车(H EV )、燃料电池电动汽车(FCEV)和纯电动汽车(EV)都是各大汽车公司研发的重点.电动汽车在驱动形式和控制方式上与传统内燃机汽车有很大区别.对于轮毂电机驱动的四轮驱动电动汽车来说,多执行器是其具有的独特优势,各个电机的扭矩可以独立、精确地加以控制,为稳定性控制带来更多自由度[1-2].传统内燃机汽车上,采用制动器为执行元件利用制动力进行车辆稳定性控制技术[3].轮毂电机轮边驱动既可以输出驱动力也可以输出制动力.文献[4-5]对电动汽车横摆控制展开了初步研究,采用简单的分配方法,即一侧增加驱动/制动扭矩$T ,另一侧减小$T ,改善车辆侧向动力学性能,该控制方法没有考虑各轮的不同状态以及车辆的约束条件.借鉴飞行控制中的控制分配方法[6],文献[7]对以PI (比例积分)控制器为参考模型的运动控制器,通过仿真研究了约束条件下的以车辆稳定性为控制目标的分配控制方法.文献[8]对轮边驱动电动汽车的纵向力控制分配进行了仿真研究,显示了分配控制算法实现车辆稳定性控制的有效性.文献[9]通过计算机仿真,对3种考虑约束条件的扭矩分配算法:重新分配广义逆法(RPI)、层叠广义逆法(CGI)和加权最小二乘法(WLS),在计算速度、迭代情况和计算精度等方面进行了对比评价,显示加权最小二乘法在计算速度与迭代精度方面具有优势.本文采用由包含前馈反馈控制的运动控制器与基于加权最小二乘法的控制分配器相结合,通过纵向力(电机扭矩)在电机约束范围内的合理分配形成直接横摆力矩,实现对车辆稳定性的控制;在所开发的四轮驱动电动汽车上进行双移线和蛇形等典型操纵稳定性实车试验,实车试验结果显示所开发的控制算法能很好地提高车辆的操纵稳定性.同济大学学报(自然科学版)第38卷1 车辆稳定性控制结构基于控制分配算法的整车稳定性控制结构分为两层(图1),由运动控制器和控制分配器构成[8].图1 车辆稳定性控制结构Fig.1 Vehicle s tab ility control structure运动控制器根据驾驶员的输入指令(转向盘转角、油门踏板、制动踏板等)以及车辆当前状态(车速、横摆角速度、质心侧偏角等)求取一个作用于质心的广义合力需求,包括纵向力需求和横摆力矩需求;然后将该广义合力需求输入给控制分配器;控制分配器通过控制分配算法,在约束条件范围内求解各个电机所需输出的扭矩.这一过程可以理解为将广义合力转化为各个执行器的分力的过程.1.1 整车控制器从结构上来说,运动控制器处于整个控制体系的第一层面,它收集来自驾驶员的转向盘转角信号、油门踏板信号以及制动踏板信号,根据参考模型计算出所需的/广义合力0,该/广义合力0作用于汽车质心,由纵向力需求F x 和横摆力矩需求M z 组成,即v =F x ,M zT.纵向力需求的计算以油门踏板信号及车身纵向加速度为依据,采用简单的PID(积分比例微分)控制来实现.而横摆力矩需求的计算则采用线性二次型调节器(LQR)控制,由前馈部分和反馈部分组成(图2).图2 横摆力矩需求的L QR 控制Fig.2 LQR co ntrol for yaw moment request对常用的前轮转向线性二自由度参考模型对比发现,零化质心侧偏角的直接横摆力矩控制参考模型在开环特性与驾驶员闭环评价方面均占优势[9].故本文选用零化质心侧偏角的直接横摆力矩控制参考模型[9].1.2 控制分配器控制分配器则是整车控制器的第二层面,它负责在满足外部约束条件(电机最大输出、路面附着系数等)的前提下将广义合力v 通过一定的分配法则,转换为各个执行器上的分力.对于本文所研究的四轮毂电机驱动电动汽车而言,执行器上的分力即指四个轮毂电机输出的转矩形成的作用于轮胎的纵向力.车辆平面运动的动力学方程如下:m v (v #x -r v y )=F x m v (v #y +r v x )=FyI z W ##=M z(1)式中:m v 为整车质量;r 为车轮半径;v x 为车辆纵向速度;v y 为车辆侧向速度;Fx为车辆所受的纵向合力;F y 为车辆所受的侧向合力;I z 为车辆绕z 轴转动惯量;W ##为车辆的横摆角加速度;M z 为车辆绕z 轴合外力矩.由于在高速工况下,前轮转角D f 通常较小,因此可忽略侧向力对纵向合力需求以及横摆力矩需求的影响,可得F x =F x fl +F x fr+F x rl +Fx rr$M =b2(-F x fl +F x fr -F x rl +F x rr )(2)式中:F x fl 为左前轮所受纵向力;F x fr 为右前轮所受纵向力;F x rl 为左后轮所受纵向力;F x rr 为右后轮所受纵向力;b 为轮距.若令广义力v =F x ,M zT,令u =F x fl ,F x fr ,F x rl ,F x rr T,则式(2)可改写为v =B u(3)式中:B 为效率矩阵.B =1111-b 2b 2-b 2b2(4)式(3)即为控制分配时所需满足的分配关系.2 控制分配算法设计四轮控制分配问题可以考虑采用重新分配广义逆法,加权最小二乘法以及层叠广义逆法求解.仿真分析表明,加权最小二乘法相比其他两种方法在计算时间与平均/最大迭代次数方面均具有明显优418第3期熊 璐,等:基于纵向力分配的轮边驱动电动汽车稳定性控制势[9].故本文采用加权最小二乘法作为实车控制分配器的分配算法.首先选定一个合理的优化目标,该优化目标都以矩阵二范数形式描述如下:min uJ =u TW T (5)约束条件:C u \u ma x -u min, D u [0, E u =0式中:C 为上下限约束;D 为不等式约束;E 为等式约束.本文中,控制向量为四轮纵向力,即u =F x fl ,F x fr ,F x rl,F x rr T ,而权重矩阵W 为对角阵,其对角元素为w ii =1(L ii F zii )2(6)式中:F zij 为各轮垂直负载,需要考虑行驶过程中的载荷转移,即包含了静态载荷和动态载荷;Lij 为各轮路面附着系数.约束条件包括了执行器约束,轮胎与路面附着能力约束与载荷约束等[8].其中各轮附着能力的约束条件如下:f 2xi+f2yi(L ii F zii )2-1[0(7)式中:f xi ,f yi 分别指四个车轮在车轮坐标系中的纵向和侧向分力.文献[7-8]中对各约束条件有详细描述.这一优化目标实质是使执行器(即轮毂电机)的控制能量消耗最小,同时,在满足优化方程约束的条件下尽量减小轮胎的纵向力,以维持较低的轮胎利用率,提高轮胎和整车的稳定性裕量.当轮胎纵向力、侧向力之和达到轮胎最大附着时即为轮胎饱和,轮胎利用率为1,是临界失稳工况.将该优化问题描述为序列最小二乘法(sequential least -squares,SLS)问题:u =arg min u I 8W u (u -u d )2(8a )8=arg min u-[u [u+W v (Bu -v )2(8b )式中:W u 是控制向量u 的权重矩阵,决定了u 的各元素之间的权重关系;而W v 是分配需求权重矩阵,决定了v 的各元素之间的权重关系.约束同前.通过引入一个权重系数C ,将式(8a)和(8b)结合起来,转化成为加权最小二乘问题(weighted least -squares,WLS).WLS 的优势在于将两步运算简化为一步,减少计算时间.式9)为WLS 问题的表达形式.u =arg min u-[u [u+W u (u -u d )22+C W v (Bu -v )22(9)该带有约束范围的WLS 问题通过有效集算法加以求解[10].3 实车试验实车试验在自行开发的/春晖二号0轮边驱动电动汽车上进行,表1与表2分别为车辆参数与驱动系统参数.表1 整车参数Tab.1 V ehicle parameters整车参数轴距/mm 1820轮距/mm 1200空载满载(2人)轮荷/kg左前轮右前轮左后轮右后轮9412487117155194161206总重/k g 497641质心高度/m0.5前轮侧偏刚度/(N #rad -1)10600后轮侧偏刚度/(N #rad -1)17600表2 驱动系统参数Tab.2 Po wertrain parameters驱动方式四轮电动轮驱动电动轮轮毂电机类型外转子直流无刷电机额定功率/k W 0.8峰值功率/k W 2.6峰值转矩/(N #m)155最高转速/(r #m in -1)816电压/V48试验采用双移线工况,道路设置参考5ISO 3888:乘用车车道急剧改变操纵用试验车道6.试验车由静止直线加速至8m #s -1以上,进入试验道路(图3).稳定性控制算法从车速大于7.5m #s-1后开始介入.第15s 左右车辆开始双移线运动,止于第25s(图4).图3 车速曲线(双移线工况,有控制)Fig.3 Vehicle velocity (lane change test,with co ntrol)419同济大学学报(自然科学版)第38卷图4 转向盘转角曲线(双移线工况,有控制)Fig.4 Steering wheel angle (lanechange test,with control)由于油门踏板踩到底,因此纵向力需求始终较大.而横摆力矩需求曲线的变化与转向盘转角曲线趋势相同,方向相反,其效果是使汽车趋向转向不足(图5).电机扭矩指令曲线显示,两侧电机有明显的交替变化趋势.当内侧电机达到最大驱动力矩输出时,外侧电机会减小驱动输出甚至输出制动力矩,以优先满足横摆力矩需求(图6).侧向加速度变化控制在较小范围(图7).图5 广义合力需求曲线(双移线工况,有控制)Fig.5 Generalized force request (lanechange test,with control)图6 电机扭矩指令曲线(双移线工况,有控制)Fig.6 Moto r to rqu e re qu es t (lane c hange tes t,with co n tro l)图7 侧向加速度曲线(双移线工况,有控制)Fig.7 Lateral ac celeratio n (lane c hange tes t,with c on tro l)对比实际横摆角速度与参考模型的期望值可以发现,曲线跟踪误差较小,偏差基本小于10%.整体控制效果令人满意(图8).图8 实际横摆角速度与期望值对比(双移线工况,有控制)Fig.8 C omp ariso n b etween the actual yaw rate and theex p ected yaw rate (lane c han ge tes t,with c ontrol)对比不加控制的双移线实验结果(图9),由于在行驶过程中未进行稳定性控制,最大侧向加速度达到8m #s-2,远大于采用分配控制的情况(图7);而且车辆的横摆角速度远远大于期望值,超出期望的横摆角速度一倍以上.蛇形工况的试验同样显示,车辆在控制之下,横摆角速度能够很好地跟踪参考横摆角速度.对比未加控制的情况,显然验证了该稳定性控制分配算法的有效性.从双移线和蛇形两种国标规定的汽车操纵稳定性试验的结果来看,本文设计的稳定性控制算法都能很好地利用轮边驱动的优点,通过各轮纵向力分配,实现附加横摆控制(见表3).两种工况下的侧向加速度都得到很大程度的降低,其中双移线工况的侧向加速度降低接近50%,显著提高车辆安全性;施加控制后车辆横摆角速度也有不同程度降低,两种420第3期熊璐,等:基于纵向力分配的轮边驱动电动汽车稳定性控制工况均降低超过20%,横摆角速度能很好地跟踪参考模型,提高了汽车稳定性,同时也改善了驾驶员的驾驶感觉,使车辆特性符合驾驶员的操纵预期,改善车辆操纵性.图9未加控制的的双移线工况试验结果Fig.9Lane change test results(without contro l)图10稳定性控制蛇形工况试验结果Fig.10Slalom test results(with co ntrol)图11未加控制的蛇形工况试验结果Fig.11Slalo m test results(witho ut control)表3有无控制试验结果对比Tab.3Result comparison of tests withco ntrol and without co ntro l工况侧向加速度最大值/(m#s-2)有控制无控制横摆角速度最大值/((b)#s-1)有控制无控制双移线工况 4.198.2129.337.2蛇形工况 4.717.0836.345.4注:试验车速8m#s-1.4结语建立了基于控制分配的适用于四轮独立驱动电动汽车的分层控制算法,选择了零化质心侧偏角的横摆力矩控制参考模型,通过WLS算法对四轮纵向力在电机约束范围内进行分配,产生直接横摆力矩来修正车辆行驶姿态.实车试验结果显示,控制算法根据各轮状态实现了四轮纵向力有效分配,车辆横摆角速度能够很好地跟踪参考横摆角速度;通过控制,降低了车辆横摆角速度与侧向加速度,提高了车辆的操纵稳定性.(下转第426页)421同济大学学报(自然科学版)第38卷轴向静压系数改善效果越显著.参考文献:[1]中国人民解放军总装备部军事训练教材编辑工作委员会.高低速风洞气动与结构设计[M].北京:国防工业出版社,2003.Editorial Committee of M ilitary Training Book of General Arm am ent Department of the Chines e People.s Lib eration Arm y.Aerodynamic and stru cture design of high and low s peed w ind tunn el[M].Beijing:Nation al Defense Indu stry Press,2003.[2]S tephen A A,T ony D B,M ichael Z.On low-frequen cy pres surepu lsation s an d s tatic pressure distribution in open jet automotive wind tunn els[C]M S ocial Autom otive Engineering.[S.L.]:SAE,1999-01-0813.[3]Gerhand W,W ilhelm V H,Stephen W.W ind tunnel pu lsationand their active suppression[C]M Social Au tom otive En gineering.[S.L.]:S AE,2000-01-0869.[4]郑志强,彭为,靳晓雄.汽车风洞声学控制研究[J].噪声与振动控制,2006,26(3):64.ZHE NG Zhiqian g,PENG W ei,JIN Xiaox iong.The s tu dy of automotive w ind tu nnel acoustic control[J].Nois e an d Vib ration Control,2006,26(3):64.[5]郑志强,王毅刚,杨志刚.一种抑制低频颤振的控制方法在模型风洞中的实验研究[J].汽车工程,2007,29(5):369.ZHE NG Zhiqian g,W ANG Yigang,YANG Zhigan g.An experimental study on the su ppres sion of the low-frequ ency pulsation of model w ind tunnel[J].Automotive Engineerin g, 2007,29(5):369.[6]Sh ih T H,Liou W W,Shabbir A,et al.A new k-E eddyvis cosity m odel for high Reynolds num ber turbulent flow s: m odel development and validation[J].Computers and Fluids, 1995,24(3):227.[7]Launder B E,Spalding D B.T he n umerical compu tation ofturb ulen t flow s[J].Com putational M eth ods in Applied M echanics and Engineerin g,1974,3(2):269.(上接第421页)参考文献:[1]Yoich i H ori.Future vehicle driven by electricity an d control)research on fou r-w hee-l m otored/UOT electr ic march II0[J].IEEE T ran saction s on Indus trial E lectr on ics,2004,51(5):954.[2]S hin-ichiro Sakai,Yoichi H ori.Advanced m otion control ofelectric vehicle w ith fast m inor feedb ack loops:bas icexperiments u sing the4-w heel motored E V/UOT ElectricM arch II0[J].JS AE Review,2001,22:527.[3]Anton T van Zanten,Rainer Erhardt,Klaus Landesfeind,etal.VDC sy stems developm ent an d p ersp ective[C]MInternational Con gres s and Ex position1998.Detroit:S ocietyof Au tom otive Engineers,1998:1-21.[4]M otoki Shin o,M asao Nagai.Yaw momen t control of electricvehicle for improving handling and s tability[J].J SAEReview,2001,22:473.[5]M asao Nagai,M otok i S hino,FE NG Gao.Study on integratedcon tr ol of active front steer angle and direct yaw moment[J].J SAE Review,2002,23:309.[6]杨恩泉,高金源.先进战斗机控制分配方法研究进展[J].飞行力学,2005,23(3):1.YANG Enquan,GAO Jin yuan.Research and development onadvanced fighter control allocation meth ods[J].Flig htDynamics,2005,23(3):1.[7]Jonas Fredrik sson,Johan Andreas son,Leo Laine.W heel forcedistribution for im proved handling in a hyb rid electric vehicleusing nonlinear con tr ol[C]M43rd IEEE C on feren ce onDecision an d Control.Atlantis:IE EE Control Sy stemsSociety,2004:4081-4086.[8]余卓平,姜炜,张立军.四轮轮毂电机驱动电动汽车扭矩分配控制[J].同济大学学报:自然科学版,2008,38(8):1115.YU Zhu oping,JIANG W ei,ZH ANG Lijun.T orquedistribution control for4-w hee-l motor driving electric vehicle[J].Journal of Tongji University:Natu ral Science,2008,38(8):1115.[9]蒋造云.四驱电动汽车稳定性控制纵向力分配算法研究[D].上海:同济大学汽车学院,2008.JIANG Zaoyu n.A research on the control allocationalgorith m for th e stab ility control of a4W D electric vehicle[D].S han ghai:T on gji University.College of Au tom otiveStudies,2008.[10]Ola H ark egard.Efficient active set algorith ms for solvin gconstrained least s quar es problems in aircraft contr olallocation[C]M Proceedings of41st IEEE Conference onDecision and s Vegas:IEEE Control Sy stemsSociety,2002:1295-1300.426。