汽车自动变速器行星齿轮速比分析
自动变速器行星齿轮系统的快速分析方法
矗峨影.///.垃7,,垲j,i1刀.i‘”,5.3位(3—1档、3-2档、3—3档)3—1档、3—2档与D一1档、D一2档完全相同,3—3档在D一3档的基础上增加了Cl、F1。
由图1b)可以看出,C1、FI、C3、F3共同作用的结果是超越离合器Fl的超越作用被取消,这相当于一个离合器单独工作。
参考图1、图6,3—3档与D一3档在车辆加速时的传动机理类似,在车辆滑行时,由于F1的超越作用被取消,所以动力输入发动机形成发动机制动。
6.2位(2—1档、2—2档)1)2-1档2—1档与D一1档、3—1档比较,增加了1/2档制动带B1,固定后排太阳轮,单向离合器F2的单向离合作用被取消。
参考图1、图4,2一l档与D—l档在车辆加速时的传动机理类似,在车辆滑行时,虽然由于Bl的加入取消了F2的单向离合作用,但由于Fl仍超越,所以动力还是不能传递到发动机形成发动机制动。
2)2—2档2—2档在D一2档的基础上增加了1/2档制动带B1。
参考图l、图5,2—2档与D一2档在车辆加速时的传动机理类似,在车辆滑行时,由于F2的单向离合作用被取消,所以动力输入发动机形成发动机制动,传动比为2档传动比的倒数。
此时,由式(6)可以得出,Fl超越,前行星排空转。
7.1位(1一l档)1—1档在2—1档的基础上增加了C3、F3。
参考图l、图4,1—1档与D一1档在车辆加速时的传动机理类似,在车辆滑行时,由于C1、F1、C3、F3的共同作用,F1的超越作用被取消;由于B1的作用,F2的单向离合作用被取消,所以动力输入发动机形成发动机制动。
B1在2—2档、1一l档时配合B2、F1工作。
可以看出,Bl仅需控制发动机制动,所以B1在结构上要比B2窄小。
2—1档仅B1作用并不能实现发动机制动。
保留Bl可以简化阀体设计,B1的油路在换档杆位于2位和1位时均接通,即仅需通过与换档杆相连的手动阀控制Bl的供油(-y-动阀与换档杆相连)。
8.快速分析法总结表3是4T65E型自动变速器运行分析简表,是对前面分析的简略概括。
通用自动变速器行星齿轮机构的速比计算

增 大到
225r/min,
因此无法
滑行。第一 排太阳轮
未参与工
图10通用6档变速器结构示意图
万方数据
蔡瓤湃痊
AUTOMOBILE MAINTENANCE
Ot,相等,且等于整数2,即以a=2、 (1+仅)=3代入方程:
N22=N13=(N11+2N12)÷3
又因为N。;=0,所以:
N13=(0+2N12)+3=2/3N12
2档滑行的另一种方法是,在第 三排太阳轮制动路线上配置自由轮 (右面三列方程)。在第一排行星齿轮 机构中,由于齿圈提速,太阳轮相对 固定,使行星架也提速到733ffmin。 因而在第二排行星齿轮机构中,由于 齿圈提速,太阳轮相对固定,使行星 架也提速到1544r/rain。最终,在第二 排行星齿轮机构中,由于齿圈提速, 太阳轮提速到212r/min。因此,在第 三排太阳轮制动路线上配置自由轮, 才能够使2档滑行。
又因为N1l_N2。,二者都是主动元 件,可以将它们合并为N:。;N。=N。2, 二者都是输出元件,可以将它们合并 为N,,,解得:
(5/3)N2l=(9,2—“3)N33 N21=(19/6)X(3/5)N33=57/30N33=
1.900N33
即:11=1.900 3档工作时三排行星齿轮机构 中各元件的转速计算如下: 1900+2x(1000)一3x(1300)=O
NI L+dINl2一(1+oq)N13=0
动器B3增配自由轮比较合理。
N21+c£2N笠一(1+cx2)N2a=0
10%,为1 lOOdmin时,第二排行星架 和第三排齿圈转速也增加10%,达到 1650ffmin。为此,第一排行星架和第 二排齿圈也从1500dmin提速到 1725r/Ⅱlin。第一排太阳轮必须随之从 2500r/min提速到2975dmin才能保 证滑行,应配置自由轮,否贝U 4档无 滑行。从左、右两边方程分析右边制
自动变速器行星齿轮机构的速比计算

出 , N 不 是 输 入 、 出 元 件 , 此 但 输 因
比 ) 只 能 间 接 求 得 。再 从 第 一 排 和 第 , 二 排 的 联 立 方 程 中得 知 :
N l+2N 1_3N 1=O 1 2- 3 N2+2N 2—3N∞=O 1 2
不 能直 接 求 得 输入 、 出的 关 系 ( 输 速
N 1 2 3 3 1= 2 N 一 ( N2) O +
N3 3 2 ( + ) 3 O 1 N3 - 1 3 N3 + _ =
解 得 : N 1N2 2 , N2 2 o 9 2 一 l N 8 1 N = =
因 为 N N3, 所 以 N lN 4= = 3 2= ÷
勒 6档 变 速 器 的 3档 速 比 计 算 为 例
进行说 明。先 列 出三排联 立方 程 :
N1 l 2 1 N1 + 一(1 1 N1 O + ) 3 = N2+ N2一(1 2 N∞ O 1 2 2 + ) =
得 : = l3 3 3 1 N∞ N1 N1 N2 = = 代入 第二排 方程 中 :
N2+2N2—3N∞=O 1 2
消 除 了 共 体 元 件 项 , 输 入 和 输 出 直 使 接 列 在 主 方 程 中 , 后 求 得 输 入 和 输 最
出 的 关 系 ( 比 ) 速 。 在 三 排 行 星 齿 轮 机 构 的 联 立 组 合 中 , 以 克 莱 斯 勒 6档 自 动 变 速 器 又 ( 图 1 ) 为 复 杂 , 是 在 Z 4变 见 最 1 它 F 速 器 的基础 上 , 前部 再增 加一 个行 在 星 排 ,主 要 用于 改 变 第 二 排 太 阳轮
5档 以 上 的 自 动 变 速 器 必 须 采
用 三 排 行 星 齿 轮 机 构 组 合 。 些 是 以 有 两 排 行 星 齿 轮 机 构 为 主 , 增 加 一 排 再
自动变速器行星齿轮机构的速比计算

大于后太阳轮输入的速比, 即: α2=( 114+86) /86=2.279 α1=( 42+86) /86=1.488 简单地说, 这种结构的 1 档速比
大于 2, 2 档速比小于 2。 ②奔驰 7 档变速器与拉维奈
AG4 变速器相比, 两者都是通过长行 星齿轮输入, 但一个在上、方向相反, 一个在下。
6.作者应对所投稿件负责, 避免抄袭和一稿多投, 稿 件 发 生 版权纠纷等问题, 责任由作者自负。
汽车维修编辑部
%%%%%%%%%%%%%%%%%%&
%%%%%%%%%%%%%%%%%%&
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%&
47 汽车维修 2008.4
3.电子邮件的主题请用文章的标题, 以避免稿件丢失 , 并 方 便编辑选稿。希望作者不要重复投稿, 在收到稿件后, 编辑部会 及时回复电子邮件, 告诉作者稿件已收到。若没有得到回复, 可 用 电 子 邮 件 或 电 话 ( 0431- 85901097、0431- 85901310) 查 询 。 另 外, 有些作者将同一篇稿件分别投在两个信箱里, 这样做没有必 要, 还易造成混乱, 所以请投在一个信箱即可。
超速档为后齿圈转速低于前齿
档位
拉维奈部分
K1
B1
B3
速比
K2
1档
○ 2.279
双齿圈输入部分
K3
B2
BR
○○
总速比 速比
1.921 4.377
圈( 6 档、7 档) , 先在后排中两元件输 入, 由于齿圈降速, 由后排方程可知, 后太阳轮必须提高转速。进而, 前排
2档
○
自动变速器行星齿轮机构的速比计算

0 +2. 9 0 N 3. 9N2 = 0 30 :
连 成 一 体 。 齿 圈 必 须 通 过 3个 短 行 前 星 齿 轮 才 能 与 3个 长 行 星 齿 轮 啮合 ,
所 以前齿 圈大 于后 齿 圈。 拉维 奈 的后排 是 一组 由太 阳轮 、 小齿 圈和 长 行 星 齿 轮 组 成 的标 准 行 星 齿 轮 机 构 ,前 排 则 为 缺 少 太 阳 轮 , 但 多 出短 行 星 齿 轮 的 变 形 行 星 齿 轮 机 构 , 同样 称 拉 维 奈 机 构 。 也 用 长 、 行 星 齿 轮 共 用 的 行 星 架 短 作 为 输 出轴 , 接 变 速 器 后 半 部 双 齿 连 圈 输 入 的 后 齿 圈 , 其 成 为 由 拉 维 奈 使 机 构 驱 动 的 主 动 件 , 是 双 齿 圈 驱 动 也
之一 。
N2 3 0 / .9) 3 .8 2 .9 2 0 N2 4 8 N∞ =( =1
两种 类型 在其 它车 型 中采 用较 少 , 其
结 构 型 式 和 速 比 计 算 方 法 与 其 它 变 速器均 有所 不 同。 的主要 档位 属于 它 在行 星齿轮 机构 中有两 个输 入元 件 、
o =8 / 2  ̄ 6 4 =2. 9o 0
个 太 阳 轮 , 个 齿 圈 , 个 行 星 架 两 一 输 出 ,而 拉 维 奈 AG4变 速 器 是 一 个
又 因为 后 齿 圈 为 主 动 , 星 架 输 行
出, 得 : 解
N2 I I ) 1 3 =(2 1/ N + I
维普资讯
警 翟
。
|
帮 I 讲■ 0叭 M 0
行星变速器速比的计算方法

2 行星变速器速比的计算方法2.1 单排行星机构的运动特性方程对行星变速器速比计算时要用到单排行星机构的运动特性方程,现有众多的汽车自动变速器原理与维修类书籍中或是按照转矩平衡和能量守衡定律来推导或是没有推导直接给出,这里介绍一种由运动学方法推导的方法。
对于图1所示的行星机构,运用机械原理中的系杆(行星架)固定法,当在行星架上观察行星排各构件的运动时,行星排中各齿轮的啮合传动就如同定轴系一样,这相当于给行星排的各构件加上了一个与行星架转速大小相等、方向相反的转速,而各构件间的相对运动关系不变。
设太阳轮转速为n t ,行星架转速为n j ,齿圈转速为n q ,太阳轮齿数为z t ,齿圈齿数为z q ,行星轮齿数为z x ,行星轮相对于行星架的转速为jx n ,则太阳轮相对于行星架的转速为j t j t n n n -=;齿圈相对于行星架的转速为j q j q n n n -=;在单行星轮单排行星机构中,从太阳轮到齿圈的传动比用转速表示的表达式为:(1) j q j t j q j x jxj t j q j x j x j t n n n n n n n n n n n n n n i --=-⨯-=⨯=; 而从太阳轮到齿圈的传动比用齿数表示的表达式为:(2) tq x qt x z z z z z z i -=⨯-=;式中—号表示齿圈的转速方向与太阳轮相反(图1中箭头所示)。
令α=tq z z 为行星排特性参数,由式(1)和式(2)得:(3) α-=--jq j t n n n n ;由(3)式得单行星轮单行星排的运动特性方程为:(4) 0)1(=+-+j q t n n n αα同理可推出图2所示的双行星轮单行星排的运动特性方程为:(5) 0)1(=---j q t n n n αα式(4)和式(5)可合并为:(6) 0)1(=±-±j q t n n n αα式中±中的+号用于单行星轮行星排,—号用于双行星轮行星排。
自动变速器行星齿轮机构的速比计算

[ 1+ ) ] 3=[ 1 仅 ) ( 仅3/ N 3 N4 ( + 4 ]+ 仅3
N 3/ 1仅3
目
。
因 为 N, N 共 体 输 出 ,二 者 转 。 。 、
从 第 三 排 行 星 齿 轮 机 构 开 始 及
速相 同 , 合并 同类项 , : 可 得
[ 1+ 3/ ] 3 [ 4 ( 仅 ) + ( 仅 ) N3= N I 1+ 4 ] 仅3 ,
N 3, 1仅3
=
工 作 的 更 为 复 杂 的传 动 。 首 先 , 出 列
二 排 行 星 架 和 第 三 排 行 星 架 3个 元 件 共体输 出 , 第 三排 行星 齿轮 机构 为 中 的 行 星 架 输 入 , 是 后 半 部 各 行 星 也 齿轮机构 总 的输入 源 。也就 是说 , 输
由于两 式相 等 , 两式 合并 , : 将 得
[ 1 仅 ) 3 N3] = N 1仅 N4) ( + 3N3 1, ( 4 4 2, - 仅3 +
N3 [ 1 仅3N3 N 1, 3 2 ( + ) 3 3]仅 : -
N4 N4 仅 4)( + 4 3 :( 1 4N 2, 1 仅 ) +
星 架与 第三 排齿 圈共体 , 又迫 使 第 三 排 齿 圈 与 太 阳轮 同 转 速 。 据 直 接 档 根 原 理 , 在 3个 元 件 中 有 2个 转 速 相
三排 联立 方程 :
N 1 仅3 2 ( + ) 3 0 3 + N3 1 仅3N3 一 -
以 后 的 各 排 行 星 齿 轮 机 构 为 变 速 器 主体 变速部 分 , 们 都是 由另一根 操 它 纵 杆 来 依 次 操 纵 I、 、 、V 4个 档 Ⅱ Ⅲ I
自动变速器速比计算
自动变速器速比的计算为适应人们日益提高的对汽车安全与舒适度的要求,自动变速器在轿车上逐渐普及。
随着自动变速器的广泛应用,轿车驾驶变得轻松,乘坐变得舒适。
但由于自动变速器的结构相对复杂,自动变速器速比计算在很多教材中暂未涉及,这给汽车维修类专业学习者理解自动变速器的传动性能和档位分析造成了一定的困难。
下面,我们对典型的单排行星齿轮机构的传动比计算原理及方法作出仔细分析。
一、自动变速器动力传递概述自动变速器由液力元件、变速机构、控制系统、主传动部件等几大部分组成。
变速机构可分为固定平行轴式、行星齿轮式和金属带式无级自动变速器(CVT)三种。
在轿车上,自动变速器都采用行星齿轮式变速机构。
行星齿轮机构一般由2个或2个以上行星齿轮组按不同的组合方式构成,其作用是通过对不同构件的驱动或制动,产生不同速比的前进挡、倒挡和空挡。
换挡执行元件是指约束行星齿轮机构的某些构件,其作用包括固定并使其转速为0,或连接某部件使其按某一规定转速旋转。
通过适当选择行星齿轮机构被约束的基本元件和约束方式,就可以得到不同的传动比,形成不同的挡位。
换挡执行元件包括离合器、制动器和单向离合器三种不同的元件。
其中,离合器的作用是连接或驱动,以将变速机构的输入轴(主动部件)与行星齿轮机构的某个部件(被动部件)连接在一起,实现动力传递。
制动器的作用是固定行星齿轮机构中的某基本元件,它工作时将被制动元件与变速器壳体连接在一起,使其固定不能转动。
单向离合器具有单向锁止的功能,当与之相连接元件的旋转趋势使其受力方向与锁止方向相同时,该元件被固定(制动)或连接(驱动);当受力方向与锁止方向相反时,该元件被释放(脱离连接)。
由此可见,单向离合器在不同的状态下具有与离合器、制动器相同的作用。
二、单排单级行星齿轮机构1、单排单级行星齿轮机构的传动比。
最简单的行星齿轮机构由一个太阳轮、一个内齿圈和一个行星架组成,我们称之为一个单排单级行星排,如图1所示。
由于单排行星齿轮机构具有两个自由度,为了获得固定的传动比,需将太阳轮、齿圈或行星架三者之一制动(转速为0)或约束(以某一固定的转速旋转),以获得我们所需的传动比;如果将三者中的任何两个连接为一体,则整个行星齿轮机构以同一速度旋转。
复合行星齿轮变速器传动比分析毕业论文
Abstract
Through practical research , for the analysis and calculation of transmission are more complex,the automotive’stransmission structureismore complex than others ,and the work processes is difficult to understand.This paperanalyze and study the transmission ratio relationship among the planet 、the sun wheel and the ring gear , so that the single-gear ranked the transmission ratio changes into a general round of the axis of calculation .Boundedby its planetary line still use the general calculation methods of the axis calculation methods, and then we can put the setting value and sought value into the power row, finally calculate the transmission ratio when the complex planetary gear mechanism transfers power. It’s much easier to use the simultaneous equations to solve such compound planetary gear transmission institutions ratio, and we could understand it easily and conveniently. It makes great significance formeto improve the maintenance capacity, as well as to grasp the principle of this type’s transmission structure rapidly.
自动变速器行星齿轮机构的速比计算

45 汽车维修 2008.6
系列讲座 AUTOMOBILE MAINTENANCE
N11+α1N12 -( 1+α1) N13=0 N31+0-( 1+α3) N33=0 因 为 N11=- N31, 可 将 两 方 程 合 并 为单列方程: α1N12-( 1+α1) N13=( 1+α3) N33 α1N12 =( 1 +α1) N13 -( 1 +α3) N33 = ( α1+α3+2) N33 N12=( α1+α3 +2) /α1N33 以 此 类 推 , 如 果 N11=- 3N31, 则 此 时 的 速 比 为( α1+3α3+4) /α1N33; 如 果 N11=- 4N31, 则 此 时 的 速 比 为( α1+4α3+ 5) /α1N33。 由此可见, 1 档速比是随着泵轮 和涡轮的转速差变化的, 它们的差别 越大, 1 档速比的分子值越大, 1 档速 比 也 就 越 大 。当 泵 轮 与 涡 轮 转 速 相 等 时 , 1 档 速 比 为( α1+α3+2) /α1, 用 α1= α3=2 代入, 1 档速比为(2+2+2)÷2=3。 2) 2 档 该变速器从 2 档开始只使用前 半部分, 变矩器及后半部分不参与工 作。2 档时是离合器 C1 工作, 使第一 排齿圈主动; 制动器 B0 工作, 使第一 排太阳轮制动, 第一排行星架输出。 代入方程: N11+α1N12-( 1+α1) N13=0 式 中 N11=0、N12 主 动 、N13 输 出 , 解得: N12=( 1+α1) /α1N13 用 α1=2 代 入 , 2 档 速 比 为( 1+2) ÷2=1.5。 3) 3 档 离合器 C2 工作, 使 第 二 排 齿 圈 和第一排行星架直接为主动, 第一排 行星架直接带动输出轴输出动力, 其 传动比等于 1。 4) 4 档 离合器 C3 工作, 使 第 二 排 行 星 架为主动, 制动器 B0 工作, 使第 一 排 、第 二 排 太 阳 轮 制 动 , 第 二 排 齿 圈 和 第 一 排 行 星 架 直 接 为 输 出 。代 入 方 程: N21+α2N22-( 1+α2) N23=0 式 中 N21=0、N23 主 动 、N22 输 出 , 解得: N23=α2(/ 1+α2) N22
行星齿轮常见速比计算公式
行星齿轮常见速比计算公式行星齿轮是一种常见的传动装置,它由外齿圈、内齿圈和行星轮组成。
行星齿轮传动系统具有结构紧凑、传动比范围广、承载能力强等优点,因此在各种机械设备中得到广泛应用。
在设计行星齿轮传动系统时,需要计算速比,以确保传动系统的性能满足设计要求。
本文将介绍行星齿轮常见的速比计算公式,帮助读者更好地理解和应用行星齿轮传动系统。
行星齿轮传动系统的速比是指输入轴和输出轴的转速之比。
在行星齿轮传动系统中,速比可以通过以下公式计算:速比 = (1 + Zs/Zp) (1 + Zr/Zp)。
其中,Zs为太阳轮的齿数,Zp为行星轮的齿数,Zr为内齿圈的齿数。
这个公式适用于一般的行星齿轮传动系统,通过输入轴和输出轴的齿轮组合来计算速比。
除了上述公式外,还有一些特殊情况下的速比计算公式。
例如,当行星轮固定不动时,速比可以简化为:速比 = -Zs/Zr。
这个公式适用于固定行星轮的情况,通过太阳轮和内齿圈的齿轮组合来计算速比。
另外,当内齿圈固定不动时,速比可以简化为:速比 = (Zs + Zp)/Zr。
这个公式适用于固定内齿圈的情况,通过太阳轮和行星轮的齿轮组合来计算速比。
以上是行星齿轮常见的速比计算公式,通过这些公式可以方便地计算行星齿轮传动系统的速比。
在实际应用中,设计人员需要根据具体的传动要求和参数,选择合适的齿轮组合,以满足传动系统的性能要求。
同时,还需要考虑传动效率、扭矩传递、轴向尺寸等因素,综合考虑来确定最终的齿轮组合方案。
除了速比计算公式外,还需要注意行星齿轮传动系统的设计和制造工艺。
例如,齿轮的加工精度、装配间隙、润滑方式等都会影响传动系统的性能和寿命。
因此,在设计和制造行星齿轮传动系统时,需要综合考虑各种因素,以确保传动系统能够稳定可靠地工作。
在实际的工程应用中,行星齿轮传动系统广泛应用于各种机械设备中,如汽车变速箱、工程机械、航天器等。
通过合理的设计和制造,行星齿轮传动系统可以实现高效、可靠的动力传递,满足不同工况下的传动需求。
自动变速器行星齿轮机构的速比计算
排 齿 圈 为 主 动 ,则 1档 速 比 = 1 d。 (+ + d ) d. 如 两 太 阳 轮 相 等 , l档 速 ÷ ; 则
比 = 1 2 ) d。 (+ d ÷
式 中 : 为 主 动 件 , 为 制 动 N N。
动 , 星 架 输 入 , 圈 输 出 , 产 生 超 行 齿 则 速 档 ;单 向 离 合 器 F 与 c 并 联 , 0 。 防
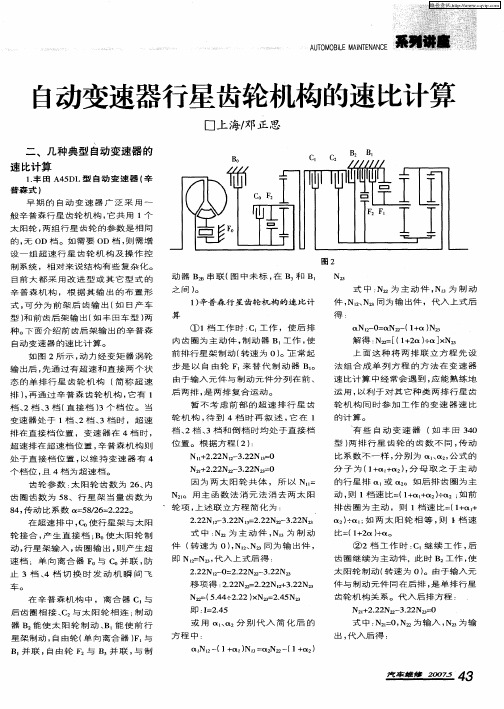
自动 变 速 器 的速 比计 算 。 如 图 2所 示 , 力 经 变 矩 器 涡 轮 动 输 出后 , 通 过 有 超 速 和 直 接 两 个 状 先 态 的 单排 行 星 齿 轮 机 构 ( 称 超 速 简 排 )再 通 过 辛 普 森 齿 轮 机 构 , 有 1 , 它 档、 2档 、 3档 ( 接 档 ) 直 3个 档 位 。 当 变 速 器 处 于 1档 、 2档 、 3档 时 ,超 速 排 在 直 接 档 位 置 , 变 速 器 在 4档 时 , 超 速 排 在 超 速 档 位 置 , 普 森 机 构 则 辛
式 中 N 为 主 动 件 , ,为 制 动 N。
1 辛 普 森 行 星 齿 轮 机 构 的 速 比计 )
算
件 , N 同 为 输 出件 ,代 入 上 式 后 N
得 :
① 1档 工 作 时 : 工 作 ,使 后 排 c, 内齿 圈为 主 动件 , 动 器 B 工作 , 制 . 使
前 排 行 星 架 制 动 ( 速 为 0) 正 常 起 转 。. 步 是 以 自 由 轮 F 来 替 代 制 动 器 B。 . 。 由于 输 入 元 件 与 制 动 元 件 分2 Nl = = ( + N 3 一
解 得 : [ 1 2  ̄÷ x 2 N ( + c) d] N 3 上 面这 种 将 两排 联 立方 程 先 设
自动变速器行星齿轮机构的速比计算
N2 ( + + + × 2 dl d ) I 1 dId2 dI d 一 × 2 ÷ ={
合 为 主 动 , 太 阳 轮 N.可 用 离 合 器 前 . C 与 输 入 轴 接 合 成 为 主 动 , 可 用 制 : 也 动 器 B。 其 制 动 。 齿 圈 N。与 后 行 使 前 :
联立 方程 :
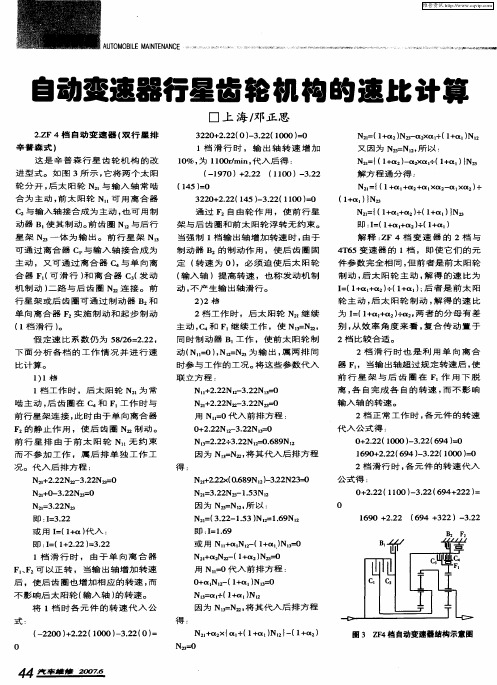
NI I 2 N I - 22 3 0 +2. 2 2 3. Nl . - N2 I 2 N2 - 22 +2. 2 r 3. N = 0
1档 工 作 时 ,后 太 阳 轮 N:为 常 。
啮 主 动 , 齿 圈 在 C 和 F 工 作 时 与 后 。
前 行 星 架 连 接 , 时 由 于 单 向 离 合 器 此
况 。代 入后 排方 程 :
N2 I 2 N2_ 22 +2. 2 2 3. N ̄ _ =0 N2 —3. 2 I +0 2 N ̄ =0 N2 l 2 N =3. 2
( 17 - 9 0)+ .2 ( 1 0) 32 22 1 0 - .2 (4 = 1 5)0 3 2 + .2 1 5)32 ( 0) 0 2 0 22 ( 4 一 .2 1 0 = 1
又 因 为 N = 2所 以 : NI ,
N2 { 1 a ) O X t ( + )N l ( + 2一 t Ol 1 aI } = 2 ÷
F 的 静 止 作 用 ,使 后 齿 圈 N笠制 动 。 2
用 N¨ 0代 入 前 排 方 程 : =
0 +2. 2Nl _ . 2NI 2 2 32 _ 3 =0
前 行 星 排 由 于 前 太 阳 轮 N。 无 约 束 。 而 不 参 加 工 作 , 属 后 排 单 独 工 作 工
自动变速器行星齿轮机构的速比计算

前 、后 两 排 行 星 齿 轮 机 构 的 传 动
比系数为: α1=110/42=2.62( 未采用) , α2=86/42=2.09。
①当 B1 制动时, 太阳轮 N21 转速 为 0。在后排行星齿轮机构中, 太阳 轮制动, 齿圈输入, 行星架输出。代入
BR
B2
公式: S1N1+IN2-( S1+I) N3=0 0+2.09N22- 3.09N23=0 N22=( 3.09/2.09) N23=1.488 N23 或直接用公式: 0+86×N22-( 42+86) ×N23=0 N22=( 128/86) N23 即: 速比 I=1.488 ②当 B3 制动时, 前齿圈被 制 动 ,
结构型式和速比计算方法与其它变
速 器 均 有 所 不 同 。它 的 主 要 档 位 属 于
在行星齿轮机构中有两个输入元件、
一个输出元件的复合传递运动。
该 变 速 器 的 结 构 如 图 13 所 示 。
变矩器的输出动力由蜗轮轴传至变
速器输入轴, 动力输入到变速器后分
为两部分: 输入轴连接拉维奈的后内
这种双齿圈输入的行星齿轮机 构, 当两齿圈的输入转速相等时, 输 出轴以直接档输出; 当后齿圈的输 入转速发生无级变化, 与前齿圈不 同步时, 输出轴随之发生反向无级 变速; 当后齿圈输入定量减速变化 时 , 输 出 轴 则 产 生 定 量 增 速 档 位 。奔 驰 7 档变速器是利用后者, 而非无 级变速。
自动变速器行星齿轮机构的速比计算
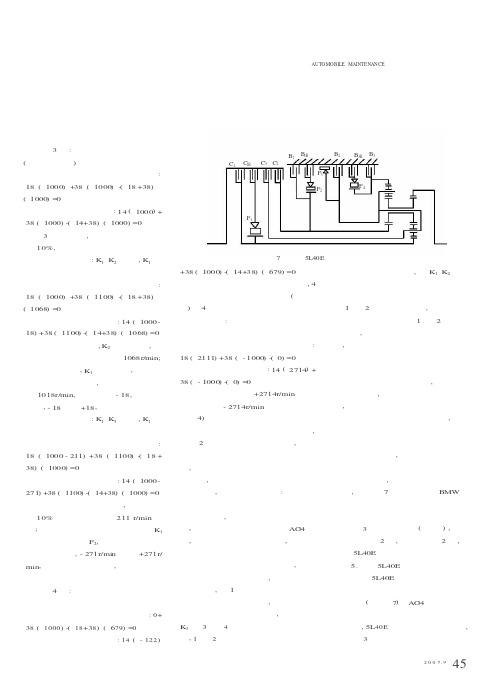
自动变速器行星齿轮机构的速比计算□上海/邓正思AUTOMOBILE MAINTENANCE系列讲座5汽车维修图7通用5L40E 变速器结构示意图③3档:后太阳轮主动、行星架(或前太阳轮)制动、后齿圈输出。
前太阳轮与后齿圈交叉组合:18×(1000)+38×(1000)-(18+38)×(1000)=0后排行星齿轮机构:14×(1000)+38×(1000)-(14+38)×(1000)=03档滑行时,当输出齿圈转速增加10%,可按两种工况分别说明。
第一种工况:K 1、K 2工作,K 1设置自由轮。
前太阳轮与后齿圈交叉组合:18×(1000)+38×(1100)-(18+38)×(1068)=0后排行星齿轮机构:14×(1000-18)+38×(1100)-(14+38)×(1068)=0在前排方程中,K 2无自由轮,齿圈增速迫使行星架提速为1068r/min;在后排方程中,K 1有自由轮,随着齿圈和行星架的提速,后太阳轮也提速到1018r/min,公式中是-18,由于有过桥,-18变为+18,滑行成立。
第二种工况:K 1、K 3工作,K 1设置自由轮。
前太阳轮与后齿圈交叉组合:18×(1000-211)+38×(1100)-(18+38)×(1000)=0后排行星齿轮机构:14×(1000-271)+38×(1100)-(14+38)×(1000)=0由于前太阳轮未啮合,齿圈增加的10%由前太阳轮减速211r/min 浮转;主动元件后太阳轮与离合器K 1之间增配自由轮F 2,又由于有短行星齿轮的过桥,-271r/min 变为+271r/min ,允许后太阳轮浮转,同样滑行条件满足。
④4档:前太阳轮制动、行星架主动、后齿圈输出。
行星齿轮速比计算解析法
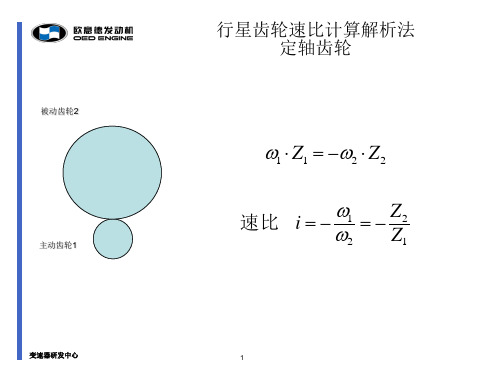
速比
主动齿轮1
变速器研发中心
2
行星齿轮速比计算解析法 定轴齿轮
1 Z 1 2 Z 2 3 Z 3
中间齿轮2
1 Z 1 3 Z 3
主动齿轮1
速比
Z3 1 i 3 Z1
被动齿轮3
变速器研发中心
3
行星齿轮速比计算解析法 行星齿轮
速比
i0
t j h j
Zh Zt
行星架j 太阳齿轮t
t (1 i0 ) j i0 h 0
齿圈h
变速器研发中心 4
行星齿轮速比计算解析法 4HP20
t 1 (1 i01 ) j 1 i01 h 1 0 t 2 (1 i02 ) j 2 i02 h 2 0 3 (1 i01 ) 5 i01 2 0 4 (1 i02 ) 2 i02 5 0
a2 b 2
a3 b3
2 1 an 3 1 bn n 1 比计算解析法 所有AT
离合器方程(结合轴
l 与 m ):
l m
变速器研发中心
5
行星齿轮速比计算解析法 所有AT
a 1 1 a 2 2 a 3 3 a 4 4 a 5 5 0 b1 1 b 2 2 b3 3 b 4 4 b5 5 0 a 2 2 a 3 3 a n n 1 b 2 2 b 3 3 b n n 1
l m 0
制动器方程(制动轴 k 0
变速器研发中心 7
自动变速器行星齿轮机构的速比计算

N3 ( + r) 3- + r ( + ) 2 1 o3N 3 0] o = 1 仅3/ =[ 3
仅 3 3 பைடு நூலகம் 3
共 体 。第 三 排 行 星 架 与 第 一 排 行 星 齿 轮机 构 中 的 齿 圈 共 体 , 输 出 轴 。 为 2 各 档 位 速 比计 算 )
它 们 分 别 是 N笠 N 再 列 出 对 应 共 体 、 ,
元 件 的 主 函数 方 程 。 第 一组 共体元件 :
N ̄ N1 ( 1 仅l 2 ÷ 1 仅 ) z 3 Nl = = + N1) ( + 1
1档 滑 行 时 三 排 行 星 齿 轮 机 构
中各 元件 的转速计 算 如下 :
又 因 为 N。 0, 以 : 所 =
N1:( o1 2 ÷ 1 仅1 = 1 1 3 0+ r ) ( + ) 仅 / + Nl (
仅1 N1 ) 2
轮 为 常 驱 动 。 圈 与 第 一 排 行 星 架 共 齿
体 , 样可 用 c 带 动 , 可 用 B 同 也 :制 动 。第 二 排 行 星 架 与 第 三 排 行 星 齿 轮 机 构 中的齿 圈共体 。 在 第 三 排 行 星 齿 轮 机 构 中 , 阳 太 轮 可 被 自 由轮 F( 中 未 画 出 ) 动 , 2图 浮
为 了 计 算 方 便 ,令 仅。仅 、 相 、 :仅,
等 , 等 于 整 数 2 克 莱 斯 勒 6档 变 且 ( 速 器 齿 数 比 为 8 / 2) 则 : 44 , 1档 速 比= 1 2) 1 2) 2 45 ( + X( + ÷ = .
即 :- 5 0 1 4.0
② 2档 工 作 时 : 先 列 出 三 排 联 首
自动变速器行星齿轮机构的速比计算

自动变速器行星齿轮机构的速比计算自动变速器行星齿轮机构是汽车自动变速器中非常重要的部件。
通过控制齿轮的转速和组合方式,可以实现车辆速度的调整和平顺的行驶感受。
其中,速比是该机构工作的重要参数之一。
下面就来分步骤介绍自动变速器行星齿轮机构的速比计算方法。
第一步,了解什么是速比所谓速比,指的是输入齿轮(通常指发动机)的转速与输出齿轮(轮毂)的转速之间的比值。
速比越高,车辆行驶的速度越快;速比越低,则车速越慢。
而自动变速器行星齿轮机构则是通过调整输入输出速比,来实现车辆的速度调整。
第二步,了解行星齿轮机构的结构和工作原理自动变速器行星齿轮机构主要由太阳齿轮、行星齿轮和环形齿轮组成。
太阳齿轮是被输入齿轮驱动的齿轮,环形齿轮则是输出齿轮,而行星齿轮则绕着太阳齿轮旋转。
当太阳齿轮旋转时,它会驱动行星齿轮通过齿轮轴转动。
而由于行星齿轮同时与太阳齿轮和环形齿轮相连,因此当太阳齿轮旋转时,行星齿轮就会带动环形齿轮一起旋转,最终实现输出,形成输出速比。
第三步,使用公式计算速比在行星齿轮机构中,输出速比是由太阳齿轮、行星齿轮和环形齿轮的齿数比例决定的。
具体公式如下:输出速比 = 1 + (N环 / N太阳)× (N太阳 + N行星)/ N行星其中,N环、N太阳和N行星分别表示环形齿轮、太阳齿轮和行星齿轮的齿数。
通常情况下,齿轮的齿数会根据需要进行设计和调整,来实现不同的输出速比。
总之,自动变速器行星齿轮机构的速比计算并不是很困难,唯一的难点可能在于齿轮的设计和制造。
精准的齿轮设计和加工,才能保证行星齿轮机构在工作中达到稳定和高效的输出速比效果。
自动变速器行星齿轮机构的速比计算

2档工作时,离合器c。继续工
阳轮与第二排太阳轮共体,。可被c, 作,使第二、三排的太阳轮为主动;制
动器B:工作,使第
Ⅶl
IU 呲
¨n|i{
c1
c2
T I一
丰 l=
l
l
-I
二排齿圈与第一排 行星架制动(转速为 0)。在第二排行星齿 轮机构中,太阳轮为 主动,齿圈制动,行 星架输出并传递给 第三排齿圈。在第三
汽车维修2008.2
行业资讯AUTOMOBlL…MENANcE
吝 注的交强险费率调整听证
|j军篆妻懑兹意
即 j
;I等 实
』|彦耸 的 一
五
付相关条款的质疑,成为 人们关注的焦点,修改《道 路交通安全法》第七十六 条相关条款势在必行, 2008年降低交强险费率 已毫无悬念。
:斡鬻篷蓄
||j;;囊黧巍嚣
1905+2.57×1000-3.57N∞=0
万方数据
解得:N33=(1905+2570)÷3.57=
1253
即5档速比1=1000+1253=0.799 6)倒档速比 这种结构的倒档也很复杂,也需 用三排联立才能求出。倒档I作时, 改为离合器c,工作,使第一排太阳 轮主动,同时制动器B,工作,使第 一、三排齿圈和第二排行星架制动 (转速为0)。同样,也是三排联立,首 先分析第一排,然后是第二排,最后 是第三排。 在第一排中,太阳轮主动,齿圈 制动,行星架输出,速比是1+d= 3.57,传递给第二排齿圈。如果太阳 轮转速为1000r/min,则输出转速为
图12 ZF一5HP24变速器结构示意图
排行星齿轮机构中,
万方数据
太阳轮和齿圈均为主动,但两者的转 速不同。假定太阳轮的转速为1,则 齿圈的转速为1/(1+仅:)。代入第三排 行星齿轮机构中:
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
自动变速器拉维纳行星齿轮典型结构速比分析
【摘要】汽车自动变速器行星齿轮的基本结构之一为拉维纳(Ravigneavx)结构。
大众01V自动变速器齿轮机构的结构包括一组拉维纳齿系和一个输出齿轮组(单行星排),拉维纳齿系和单行星排共齿圈,可实现5个前进速比。
汽车自动变速器行星齿轮的基本结构之一为拉维纳(Ravigneavx)结构。
如图-1所示,拉维纳行星排的结构特点是:???
拉维纳行星排的传动规律:???
大众01V自动变速器齿轮机构的结构如图—1所示,包括一组拉维纳齿系和一个输出齿轮组(单行星排),并且,拉维纳齿系和单行星排共齿圈。
换挡执行机构包括:4个离合器、3个制动器和1个单向离合器。
离合器C1、C2 和C3用于拉维纳行星齿轮组,C1用于将动力传给拉维纳齿系小太阳轮;C2用于将动力传给拉维纳齿系大太阳轮;C3用于将动力传给拉维纳齿系行星架。
C4用于接合输出单行星排的齿圈和太阳轮。
制动器Bl用于制动拉维纳齿系大太阳轮;制动器B2用于制动拉维纳齿系行星架;B3用于制动输出单行星排的太阳轮。
单向离合器F用于单向阻止拉维纳行星架的逆时针(逆向曲轴转动方向)转动。
C2
C1C3F B2C4
B3
B1
C 1 C 2 C 3 C 4 B 1 B 2 B 3 F 1档 √ √ √ 2档 √ √ √ 3档 √ √ √ 4档 √ √ √ √ 5档 √ √ √ R 档
√
√
√
√----工作
图—1 大众01V 自动变速器拉维纳结构与传动规律
速比分析:
N 1+α•N 2=(1+α)N 3 α= Z 2 /Z 1 N 4−β•N 2=(1+β)N 3 β= Z 2 /Z 4 N 01+γ•N 02=(1+γ)N 03 γ= Z 02 /Z 01 N 02= N 2
其中:
N 1为拉维纳齿系大太阳轮的转速; Z 1为拉维纳齿系大太阳轮的齿数; N 2为拉维纳齿系齿圈的转速; Z 2为拉维纳齿系齿圈的齿数;
N3为拉维纳齿系行星架的转速;
N4为拉维纳齿系小太阳轮的转速;
Z4为拉维纳齿系小太阳轮的齿数;
N01为输出单行星排太阳轮的转速;
Z01为输出单行星排太阳轮的齿数;
N02为输出行星排齿圈的转速;
Z02为输出行星排齿圈的齿数;
N03为输出行星排行星架的转速。
1 1档动力传递
1.1 动力传递分析
1档动力传递如图—4所示。
离合器Cl、制动器B3、单向离合器F工作。
离合器C1驱动小太阳轮顺时针转动,短行星轮逆时针转动,长行星轮顺时针转动,但其齿圈是输出元件运动阻力大,所以行星架有逆时针转动的趋势,由于单向离合器F阻止行星架逆时针转动,因此拉维纳行星齿轮组的齿圈只能被长行星轮驱动顺时针转动,并将动力传给输出齿轮组的齿圈。
在输出行星齿轮组中,制动器B3固定输出单行星排的太阳轮,因此齿圈顺时针转动驱动行星架,在固定的太阳轮上顺时针滚动将动力输出。
F B3
C1
图—4 大众01V 1档动力传递
1.2 速比分析
N4−β•N2=(1+β)N3β= Z2 /Z4
N01+γ•N02=(1+γ)N03γ= Z02 /Z01
其中:N3=0 N01=0 N02= N2
i1= N4/ N03=β/γ
2 2档动力传递
2.1 动力传递分析
2档动力传递如图—5所示。
离合器Cl、制动器B1、制动器B3工作。
离合器Cl驱动小太阳轮顺时针转动,短行星轮逆时针转动,由于制动器B1固定了大太阳轮,长行星轮在小太阳轮上顺时针滚动的同时,驱动齿圈顺时针转动,将动力传给输出单行星排的齿圈。
输出单行星排的齿圈顺时针转动驱动行星架,使其在被制动器B3固定的太阳轮上顺时针滚动,再次减速将动力输出。
B3
C1
B1
图—5 大众01V 2档动力传递
2.2 速比分析
N1+α•N2=(1+α)N3α= Z2 /Z1
N4−β•N2=(1+β)N3β= Z2 /Z4
N01+γ•N02=(1+γ)N03γ= Z02 /Z01
其中:N1=0 N01=0 N02= N2
故:
i2= N4/ N03=(1+γ)(1+2β+αβ)/(1+αβ)
3 3档动力传递
3.1 3档动力传递分析
3档动力传递如图—6所示。
离合器C1、C4、制动器B1工作。
拉维纳行星齿轮组的工
作情况与2档时相同,在输出单行星排,离合器C4工作,将动力传给太阳轮使其与齿圈同步转动将动力输出,输出单行星排传动比为1。
C4
C1
B1
图—6 大众01V 3档动力传递
3.2 速比分析
N1+α•N2=(1+α)N3α= Z2 /Z1
N4−β•N2=(1+β)N3β= Z2 /Z4
其中:N1=0 N03=N02= N2
故:
i3= N4/ N03=(1+(2+α)β)/(1+α)
4 4档动力传递
4档动力传递如图—7所示。
离合器C1、C3、C4工作。
拉维纳行星齿轮组的后太阳轮和行星架同时从离合器Cl、C3获得动力,各元件整体转动,传动比为1。
输出单行星排与3档时相同,离合器C4工作,将动力传给太阳轮,使其与齿圈同步转动,将动力输出,在输出单行星排传动比也为1,为直接档。
C1
C3C4
图—7 大众01V 4档动力传递
5 5档动力传递 5.1 动力传递分析
5档动力传递如图—8所示。
离合器C3、C4、制动器B1工作。
拉维纳行星齿轮组的前太阳轮被制动器B1固定,行星架从离合器C3获得动力,驱动齿圈超速转动,传动比小于1。
输出单行星排与3、4档时相同,离合器C4使太阳轮与齿圈同步转动将动力输出,在输出单行星排传动比为1,此档为超速挡。
C3
C4
B1
图—8 大众01V 5档动力传递
3.6.2 速比分析
N 1+α•N 2=(1+α)N 3 α= Z 2 /Z 1 N 4−β•N 2=(1+β)N 3 β= Z 2 /Z 4
其中:N 1=0 N 02= N 2
故:
i5= N4/ N03=(α+β+αβ)/(1+α)
6 R档动力传递
6.1 动力传递分析
R档动力传递如图—9所示。
离合器C2、制动器B2、制动器B3工作。
拉维纳行星齿轮组的行星架被制动器B2固定,前太阳轮从离合器C2获得动力,驱动齿圈反向转动。
制动器B3固定输出单行星排的太阳轮,齿圈驱动行星架再次减速,反向驱动车辆倒驶。
B2B3
C2
图—9 大众01V R档动力传递
6.2 速比分析
N1+α•N2=(1+α)N3α= Z2 /Z1
N4−β•N2=(1+β)N3β= Z2 /Z4
N01+γ•N02=(1+γ)N03γ= Z02 /Z01
其中:N3=0 N01=0 N02= N2
故:
i R= N1/ N03=α(1+γ)/γ。