2013年东南大学《机械原理》考研真题(标准版)
(完整版)机械原理考研试题
二O 一二年招收硕士研究生入学考试试题考试科目及代码: 机械原理 819 适用专业: 机械工程0802可使用的常用工具:直尺,圆规,计算器答题内容写在答题纸上,写在试卷或草稿纸上一律无效考完后试题随答题纸交回。
考试时间3小时,总分值 150 分。
姓名:报考学科、专业:准考证号码:密封线内不要写题所示机构运动简图中,已知:L=400mm转动,用瞬心法求机构3的速度v3。
(本小题二O 一二年招收硕士研究生入学考试试题参考答案及评分标准机械原理代码819一、单项选择题(本大题10小题,每题2分,共20分,错选、多选均无分)1.A 2.C 3.B 4.B 5.B 6.A 7.A 8.D 9.C 10.B二、判断题(正确的打√,错误的打⨯。
10小题⨯2分=20分)1、(⨯)2、(⨯)3、(√).4、(⨯)5、(√)6、(⨯)7、(√)8、(√)9、(⨯)10、(√)三、分析与简答题(10分⨯4小题 =40分) 1、如图2所示的曲柄滑块机构:(1)曲柄为主动件,滑块朝右运动为工作行程,试确定曲柄的合理转向,并简述其理由;(2分)(2)当曲柄为主动件时,画出极位夹角θ ,最小传动角γ min 。
(4分)(3)设滑块为主动件,试用作图法确定该机构的死点位置;(4分) 解题分析:1.顺时针为合理转向,这是利用机构急回运动特性,并使回程时间比工作时间快一个极位夹角θ的转动时间,节约循环时间。
见题解2图(a ) 2.若滑块为主动件,则AB 1C 1、AB 2C 2为死点位置。
见题解2-2图(a )解答: 若曲柄为主动件,极位夹角θ如图(a )所示,最小传动角如图(b )所示。
2、运动链代号:N 31—012, N 32—002,N 41—0122,画出该运动链的结构图。
变换出一个机构,要求以四元连杆为机架,且机构的执行构件为一个在固定导路上运动的滑块。
解答:运动链结构如图所示。
(5分) 变换的机构根据实际情况判断。
机械原理试题和答案解析(试题 答案解析)

2013年机械原理自测题(一)一.判断题(正确的填写“T”,错误的填写“F”)(20分)1、根据渐开线性质,基圆内无渐开线,所以渐开线齿轮的齿根圆必须设计比基圆大。
( F )2、对心的曲柄滑块机构,其行程速比系数K一定等于一。
( T )3、在平面机构中,一个高副引入二个约束。
( F )4、在直动从动件盘形凸轮机构中,若从动件运动规律不变,增大基圆半径,则压力角将减小( T )5、在铰链四杆机构中,只要满足杆长和条件,则该机构一定有曲柄存在。
( F )6、滚子从动件盘形凸轮的实际轮廓曲线是理论轮廓曲线的等距曲线。
( T )7、在机械运动中,总是有摩擦力存在,因此,机械功总有一部分消耗在克服摩擦力上。
( T )8、任何机构的从动件系统的自由度都等于零。
( T )9、一对直齿轮啮合传动,模数越大,重合度也越大。
( F )10、在铰链四杆机构中,若以曲柄为原动件时,机构会出现死点位置。
( F )二、填空题。
(10分)1、机器周期性速度波动采用(飞轮)调节,非周期性速度波动采用(调速器)调节。
2、对心曲柄滑块机构的极位夹角等于( 0 )所以(没有)急回特性。
3、渐开线直齿圆柱齿轮的连续传动条件是(重合度大于或等于1 )。
4、用标准齿条形刀具加工标准齿轮产生根切的原因是(齿条形刀具齿顶线超过极限啮合点N1 )。
5、三角螺纹比矩形螺纹摩擦(大),故三角螺纹多应用(联接),矩形螺纹多用于(传递运动和动力)。
三、选择题(10分)1、齿轮渐开线在()上的压力角最小。
A )齿根圆; B)齿顶圆; C)分度圆; D)基圆。
2、静平衡的转子(①)是动平衡的。
动平衡的转子(②)是静平衡的。
①A)一定; B)不一定; C)一定不。
②A)一定; B)不一定: C)一定不。
3、满足正确啮合传动的一对直齿圆柱齿轮,当传动比不等于一时,他们的渐开线齿形是()。
A)相同的; B)不相同的。
4、对于转速很高的凸轮机构,为了减小冲击和振动,从动件运动规律最好采用()的运动规律。
机械原理考研题库及答案详解大全

机械原理考研题库及答案详解大全机械原理考研题库及答案详解大全机械原理是机械工程专业考研的重要科目之一,涉及到力学、材料力学、结构力学等多个方面的知识。
为了帮助考生更好地备考,本文将为大家提供一份机械原理考研题库及答案详解大全。
第一部分:力学基础1. 以下哪个不是刚体力学的基本假设?A. 刚体是一个质点系B. 刚体的形状和大小不变C. 刚体的内部无任何相对运动D. 刚体上任意两点之间的距离不变答案:A解析:刚体力学的基本假设包括刚体的形状和大小不变、刚体的内部无任何相对运动、刚体上任意两点之间的距离不变。
刚体是一个质点系并不是刚体力学的基本假设。
2. 以下哪个不是刚体力学的基本定律?A. 牛顿第一定律B. 牛顿第二定律C. 牛顿第三定律D. 动量守恒定律答案:D解析:刚体力学的基本定律包括牛顿第一定律、牛顿第二定律和牛顿第三定律。
动量守恒定律是力学的基本定律,但不属于刚体力学的基本定律。
3. 以下哪个不是刚体力学的基本方程?A. 动力学方程B. 运动学方程C. 平衡方程D. 动量守恒方程答案:D解析:刚体力学的基本方程包括动力学方程、运动学方程和平衡方程。
动量守恒方程是力学的基本方程,但不属于刚体力学的基本方程。
第二部分:材料力学1. 以下哪个不是材料力学的基本假设?A. 弹性体的应力与应变之间存在线性关系B. 弹性体的体积不变C. 材料的应力与应变之间存在线性关系D. 材料的应力与应变之间存在非线性关系答案:D解析:材料力学的基本假设包括弹性体的应力与应变之间存在线性关系、弹性体的体积不变、材料的应力与应变之间存在线性关系。
材料的应力与应变之间存在非线性关系并不是材料力学的基本假设。
2. 以下哪个不是材料力学的基本定律?A. 霍克定律B. 应力应变关系C. 应力平衡定律D. 应变平衡定律答案:D解析:材料力学的基本定律包括霍克定律、应力应变关系和应力平衡定律。
应变平衡定律是材料力学的基本定律,但不属于刚体力学的基本定律。
南京理工大学812机械原理2013年真题完整回忆版

南京理工大学812机械原理2013年真题完整回忆版1.分析计算下图所示的平面机构自由度,如存在复合铰链、局部自由度以及虚约束,请指出。
此题有两个小题,第二个小题的构件数目太多(17个好像),题目不难,有些繁琐。
解:第一个图F=1第二个图构件多,只有虚约束和复合铰链。
2.如图四杆机构ABCD,四杆长均已知。
AB杆的角速度已知w1。
1)自定义比例尺画机构简图,标出所有瞬心。
2)若∠BAD=165°,求出C点的速度VC;3)画出C点速度为零时,机构的位置。
解:1)瞬心易求。
2)先画出机构简图,然后VC =VB+VCBvB的方向垂直AB杆,大小W1×lABvCB垂直于BC杆。
画速度分析图可求的。
3)即死点。
AB和BC共线时。
C点速度为0。
3.如图凸轮机构,已知凸轮半径R,OA,滚子半径r。
,BC,B点位置确定。
(1)画出理论轮廓线、基圆,并标出基圆半径;(2)画出凸轮在图示E点处的压力角α;(3)标出升程角φ,并说明凸轮的转向。
解:1)理论轮廓线:OC为半径 O为圆心基园:OA和凸轮交点M,以AM为半径,A为圆心画圆2)反转法。
B点绕A点转动,BC长固定,OE延长交理论轮廓线线于点P,以P为圆心,BC 为半径可求出B'点。
P点速度垂直与B'C杆,力垂直于切线。
F和V的夹角即为E点压力角。
3)OA延长,交凸轮于MN两点,由MN两点找出BC杆的位置,然后,两个B1和B2的对圆心A的夹角即为升程角。
这里要自己假设凸轮的转向。
然后反转判断哪个角是升程角。
4. 在图示机构中,各杆杆长已知,构件2以等角速度w2按一定方向转动,当∠BAD一固定角度时,运用图解法求出6杆的角速度α,角加速度ε。
解:6杆的分析就是分析4件上的C点。
对2构件扩大到C点,然后列两个速度和加速度方程,一个是C点,一个是D点。
即可求解。
5.机构设计题。
机构简图如下:题目要求是使该机构在整个行程中有较小的压力角,画出机构简图,并求出OA,OC,DB的长度。
2013东大真题解答

图 1 题二电路图
= 解:Ru0/r/(ss)C10
−uc(s) R1+sC11
T(s) = − (R0C0s+1)(R1C1s+1)
R0C1s
三、(共 20 分)已知控制系统结构图如图 2 所示,其中������������(������)的单位脉冲响应为������������ − ������������������−������。 试分析内反馈������������的存在对系统稳定性以及系统稳态误差的影响。
继电器特性描述函数:������(������) = ������������ √������ − (������)������ ,������ ≥ ������。
������������
������
图 4 题七系统结构图
解:W (s)
3
, W ( j)
j3
s(0.8s 1)(s 1)
(s + 2)[(s + 2)(s + 5) − (s − 1)(2s + 10 + s + 2)] = 0 ������1 = −2,为两个开环极点 ������2 + ������ − 11 = 0
������ = −1±√1+44 = −1±6.7,
2
2
������2 = 2.85(舍去),������3 = −3.85——分离点
−1]Βιβλιοθήκη Kz−1(0.368 + 0.264Zz−1) = (1 − 0.368z−1)[1 + (K − 1)z−1]
所以,Wk(Z)
=
Z
[1]
s
∙
Wk1(Z)
2013年东南大学《机械原理》考研真题(标准版)
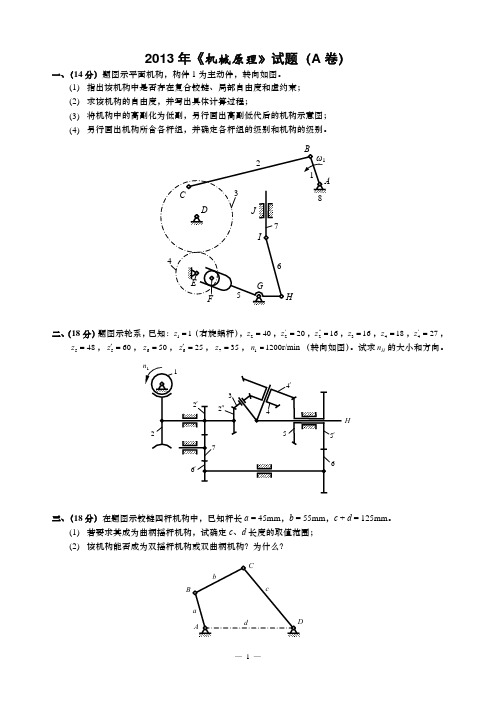
2013年《机械原理》试题(A 卷)一、(14分)题图示平面机构,构件1为主动件,转向如图。
(1) 指出该机构中是否存在复合铰链、局部自由度和虚约束;(2) 求该机构的自由度,并写出具体计算过程;(3) 将机构中的高副化为低副,另行画出高副低代后的机构示意图; (4) 另行画出机构所含各杆组,并确定各杆组的级别和机构的级别。
二、(18分)题图示轮系,已知:11=z (右旋蜗杆),402=z ,202=′z ,162=′′z ,163=z ,184=z ,274=′z ,485=z ,605=′z ,506=z ,256=′z ,357=z ,r/min 12001=n (转向如图)。
试求H n 的大小和方向。
三、(18分)在题图示铰链四杆机构中,已知杆长a = 45mm ,b = 55mm ,c + d = 125mm 。
(1) 若要求其成为曲柄摇杆机构,试确定c 、d 长度的取值范围; (2) 该机构能否成为双摇杆机构或双曲柄机构?为什么?H四、(16分)题图示一转子由两个互相错开90°的均质偏心轮1、2组成,每一偏心轮的质量均为m ,偏心距均为r 。
拟在平衡平面A 、B 上半径为2r 处分别添加平衡质量A b m )(和B b m )(,使该转子达到动平衡。
试求平衡质量A b m )(、B b m )(的大小和相应的方位角A b )(θ、B b )(θ。
五、(22分)题图(a)为一机械系统的等效动力学模型。
已知稳定运转时期一个运动周期内等效阻力矩M r 的变化规律如图(b)所示,等效驱动力矩M d 为常数,等效转动惯量为J = 1kg ⋅m 2(为常数),等效构件的平均转速为n m = 1500r/min 。
试求: (1) 等效驱动力矩M d ;(2) 等效构件的速度波动系数δ 以及等效构件的最高转速n max 和最低转速n min ;(3) 若要求等效构件的许用速度波动系数为[δ ] = 0.01,试求安装在等效构件A 轴上飞轮的最小转动惯量J F 。
东南大学机械考研@东南机械原理13-15答案

写在前言:
以下的答案是我的一位同学在考前几天发给我的,由于之前13至15都没答案,有些题目做得稀里糊涂的。
作为过来人,我深知你们对答案的渴求,现在在你们刚准备考研时,我将他们整理好送给你们,也算是将传统发扬光大,希望你们好好珍惜,不要走我们所走过的弯路,最后祝各位2017的考研成功!努力吧,少年们!(个人对高价卖资料非常痛恨,群里的资料足够你用的了,希望你们不要花冤枉钱,这是学长发自肺腑之言。
当然,我也希望你们不要以此牟利。
)
13年答案:。
机械专业课真题汇总
机械专业课真题汇总机械原理真题09重庆大学机械原理真题11山东科技大学机械原理真题18华中农业大学机械原理真题2010武汉理工机械原理09山东科技大学机械原理真题19西安电子科技大学机械原理2015西工程机械原理试题及答案解析05年上海理工大学机械原理13年上海理工大学机械原理2010武汉理工机械原理20浙江工业大学机械原理14西安电子科技大学机械原理17西安电子科技大学机械原理18西安电子科技大学机械原理2019浙江理工大学机械设计基础2018浙江理工大学机械设计基础2017浙江理工大学机械设计基础2020温州大学机械原理2009武汉理工机械原理2012河北工业大学机械原理2010北京交通大学机械原理2020南京航空航天大学机械原题真题2020机械原理考研真题及答案(武汉科技大学)2019机械原理真题及答案(武汉科技大学)2018机械原理真题及答案(武汉科技大学)2017机械原理真题及答案(武汉科技大学)2016机械原理真题及答案(武汉科技大学)2015机械原理真题及答案(武汉科技大学)2014机械原理真题及答案(武汉科技大学)2013机械原理真题及答案(武汉科技大学)2012机械原理真题(武汉科技大学)2011机械原理真题(武汉科技大学)2011机械原理真题答案(武汉科技大学)2019杭州电子科技大学机械原题真题2012南京航空航天大学机械原题真题2013东南大学机械原题真题2011东南大学机械原题真题及答案2004福州大学机械考研真题答案2004福州大学机械考研真题2011中国矿业大学机械原理真题2014江苏理工学院机械原理真题A答案2014江苏理工学院机械原理真题A上海理工大学机械06年考研真题笔记(一)上海理工大学机械07年考研真题笔记(二)上海理工大学机械08、10、12、13年考研真题笔记(三)2007河北工业大学机械原理真题答案2007河北工业大学机械原理真题2018西安工业大学机械原理真题2019三峡大学机械原理考研真题2018三峡大学机械原理考研真题2015年南京理工大学机械原理考研真题2019年武汉科技大学机械原理考研真题江苏大学803机械原理样题答案江苏大学803机械原理考试样题2012江苏大学803机械原理考研真题2008江苏大学803机械原理考研真题2006江苏大学803机械原理考研真题2011江苏大学803机械原理考研真题2007江苏大学803机械原理考研真题2009江苏大学803机械原理考研真题2010江苏大学803机械原理考研真题2016年中山大学886机械原理考研真题05合肥工业机械原理17昆明理工机械原理20昆明理工机械原理19昆明理工机械原理机械设计/机械设计基础真题2021扬州大学机械设计真题07江南大学机械设计真题08江南大学机械设计真题07浙江大学机械设计基础真题18广东工业大学机械设计基础真题2016太原科大机械设计基础真题中国科学院大学20机械设计真题15广东工业大学机械设计基础真题07天津工业大学机械设计基础真题11厦门大学机械设计基础真题2012宁夏大学机械考研试题2018浙江理工大学机械设计基础2017宁夏大学机械设计2010西安理工机械设计基础2018山东大学机械设计基础2013深圳大学机械设计基础2007西安交通大学机械设计基础2008西安交通大学机械设计基础2019湖北工业大学机械设计真题2020湖北工业大学机械设计真题2018湖北工业大学机械设计真题20南京工业大学机械设计真题20河海大学机械考研真题及答案2018华侨大学机械设计考研真题2018广州大学机械设计真题答案2018广州大学机械设计真题2016广州大学机械设计真题答案2016广州大学机械设计真题2015广州大学机械设计真题答案2015广州大学机械设计真题2014广州大学机械设计真题答案2014广州大学机械设计真题2020广东工业大学机械设计基础真题答案2020广东工业大学机械设计基础真题2019广东工业大学机械设计基础真题答案2019广东工业大学机械设计基础真题2008西安交通大学机械设计基础真题答案西安交通大学2008年机械设计基础真题2014年江西理工大学机械设计基础考研真题2018年山东大学844机械设计基础考研真题2017年山东大学844机械设计基础考研真题2016年山东大学844机械设计基础考研真题2019年广东工业大学801机械设计基础考研真题2017年华南理工大学856机械设计基础考研真题2018东华理工大学832机械设计考研真题2017东华理工大学832机械设计考研真题2017东华理工大学832考研真题答案2016东华理工大学832机械设计考研真题2016东华理工大学832考研真题答案2011广东工业大学机械设计基础真题2011广东工业大学机械设计基础真题答案华中科技大学2010年机械设计基础真题湘潭大学2013年机械设计基础真题2011宁夏大学机械设计(含机械原理)考研真题厦门大学2012年机械设计基础真题中国科学技术大学2014年机械设计真题材料力学真题2015年南京理工大学材料力学考研真题2014年江西理工大学材料力学考研真题2017年华南理工大学841材料力学考研真题2008年吉林大学材料力学真题答案(资料样板)2020南京航空航天大学材料力学真题理论力学真题2004燕山大学理论力学2015年南京理工大学理论力学考研真题2019年宁波大学理论力学考研真题(B卷)2015青岛理工大学814理论力学考研真题2012南京航空航天大学815理论力学考研真题汽车理论真题2019年武汉科技大学汽车理论考研真题2018年华南理工大学812汽车理论考研真题答案2018浙江工业大学819汽车理论考研真题2019年广东工业大学805汽车理论考研真题2018年华南理工大学812汽车理论考研真题2017年华南理工大学812汽车理论考研真题2016年华南理工大学812汽车理论考研真题液压传动真题2019年武汉科技大学液压传动考研真题流体力学真题2017年华南理工大学836流体力学与传热考研真题2016年华南理工大学836流体力学与传热考研真题每日一题:静平衡的转子( B )是动平衡的,动平衡的转子( A )是静平衡。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
2013年《机械原理》试题(A 卷)
一、(14分)题图示平面机构,构件1为主动件,转向如图。
(1) 指出该机构中是否存在复合铰链、局部自由度和虚约束;
(2) 求该机构的自由度,并写出具体计算过程;
(3) 将机构中的高副化为低副,另行画出高副低代后的机构示意图; (4) 另行画出机构所含各杆组,并确定各杆组的级别和机构的级别。
二、(18分)题图示轮系,已知:11=z (右旋蜗杆),402=z ,202=′z ,162=′′z ,163=z ,184=z ,274=′z ,
485=z ,605=′z ,506=z ,256=′z ,357=z ,r/min 12001=n (转向如图)。
试求H n 的大小和方向。
三、(18分)在题图示铰链四杆机构中,已知杆长a = 45mm ,b = 55mm ,c + d = 125mm 。
(1) 若要求其成为曲柄摇杆机构,试确定c 、d 长度的取值范围; (2) 该机构能否成为双摇杆机构或双曲柄机构?为什么?
H
四、(16分)题图示一转子由两个互相错开90°的均质偏心轮1、2组成,每一偏心轮的质量均为m ,偏
心距均为r 。
拟在平衡平面A 、B 上半径为2r 处分别添加平衡质量A b m )(和B b m )(,使该转子达到动平衡。
试求平衡质量A b m )(、B b m )(的大小和相应的方位角A b )(θ、B b )(θ。
五、(22分)题图(a)为一机械系统的等效动力学模型。
已知稳定运转时期一个运动周期内等效阻力矩
M r 的变化规律如图(b)所示,等效驱动力矩M d 为常数,等效转动惯量为J = 1kg ⋅m 2(为常数),等效构件的平均转速为n m = 1500r/min 。
试求: (1) 等效驱动力矩M d ;
(2) 等效构件的速度波动系数δ 以及等效构件的最高转速n max 和最低转速n min ;
(3) 若要求等效构件的许用速度波动系数为[δ ] = 0.01,试求安装在等效构件A 轴上飞轮的最小转
动惯量J F 。
六、(16分)在一对上下布置、标准安装的渐开线直齿圆柱外啮合标准齿轮机构中,位于上方的主动轮
1作逆时针转动。
已知:标准中心距a = 126mm ,z 1 = 17,z 2 = 25,°=20α,1*
=a
h 。
(1) 求齿轮模数m 以及两轮的分度圆半径(r 1、r 2)、基圆半径(r b1、r b2)、齿顶圆半径(r a1、r a2)
和齿根圆半径(r f1、r f2);
(2) 以中心线为垂直布置,取长度比例尺μ l = 2mm/mm ,画出两轮的基圆、齿顶圆、分度圆、齿根
圆和节圆(r 1′、r 2′),标出对应的半径,并说明各轮分度圆和节圆之间的大小关系; (3) 画出理论啮合线N 1N 2和实际啮合线B 1B 2,标出啮合角α′; (4) 标出两轮齿廓在齿顶圆上的压力角1a α和2a α; (5) 求重合度αε的大小(有关参数可直接从图上量取)。
七、(14分)如题图所示,已知铰链四杆机构ABCD 中主动连架杆AB 的长度l AB = 16mm ,机架AD 的长
度l AD = 50mm ,当AB 从图示AB 1位置顺时针转动过程中,连杆BC 平面上的E 点经过E 1、E 2、E 3三点,β = 45°,DE 1 = 30mm ,E 1E 2 = E 2E 3 = 12mm 。
试采用图解法设计该机构,求出BC 、CD 和CE 的长度,并简要说明作图步骤。
1000
(a)
(b)
八、(32分)
(1) 在图(2) 在图δ(要
(3) 在图(4) 在图(5) 在图(6) 在图,
(7) F Q 所需M d
(a)
(b)
B 13
μ l。