实例7 运用VRML和3DS MAX进行虚拟现实制作--以座灯为例
利用3Dmax进行VR虚拟现实体验设计

利用3Dmax进行VR虚拟现实体验设计引言:VR(虚拟现实)技术现在已经成为了科技领域的热门话题之一。
作为一种可以提供身临其境的沉浸式体验的技术,VR已经在游戏、教育、医疗等领域得到了广泛的应用。
本文将详细介绍如何使用3Dmax软件来进行VR虚拟现实体验的设计,以帮助读者了解和掌握这一流行的技术。
一、VR虚拟现实体验的定义和作用1. VR虚拟现实体验的定义:VR是指一种通过电脑生成的模拟器材,模拟人的某种感官,以达到虚拟重现真实场景的技术。
2. VR虚拟现实体验的作用:VR技术的出现可以让人们身临其境地感受到虚拟场景,有助于提升用户体验并提供更加沉浸式的感觉。
对于游戏、教育、医疗等领域来说,VR技术具有巨大的发展潜力。
二、制作VR虚拟现实体验的工具1. 3Dmax软件简介:3Dmax是目前市场上最为流行的3D建模和动画软件之一。
2. 3Dmax软件的功能:3Dmax软件提供了丰富的建模工具和材质库,可以实现从三维模型的建立到动画的制作的全过程。
三、使用3Dmax制作VR虚拟现实体验的步骤1. 确定虚拟现实体验的主题和场景:首先需要明确虚拟现实体验的主体和场景,例如游戏、博物馆或房屋展示等。
2. 创建3D模型:使用3Dmax的建模工具,根据虚拟现实体验的主题,依据设计需求创建相应的3D模型。
3. 设计场景:将创建的3D模型放置到虚拟现实体验场景中,通过3Dmax 的场景设置功能,调整模型的位置、大小和角度,搭建虚拟现实环境。
4. 添加材质和纹理:使用3Dmax的材质库,为3D模型添加适当的材质和纹理,以增强虚拟现实体验的真实感。
5. 调整光照效果:通过调整3Dmax的灯光设置,改变虚拟现实体验场景的光照效果,使其更加逼真。
6. 动画制作:利用3Dmax的动画制作功能,为虚拟现实体验中的场景和模型添加动态效果,以增强用户的沉浸感。
7. 导入VR设备:将设计好的虚拟现实体验导入VR设备中,例如VR头盔或手柄,与用户进行交互。
3Dmax虚拟现实制作教程:制作适用于VR的作品

3Dmax虚拟现实制作教程:制作适用于VR的作品随着虚拟现实(Virtual Reality,简称VR)技术的日益成熟和普及,越来越多的人对于如何制作适用于VR设备的作品产生了兴趣。
在本篇教程中,我将为大家详细介绍使用3Dmax软件制作适用于VR的作品的步骤。
无论你是初学者还是有一定经验的设计师,本教程都将对你有所帮助。
步骤一:熟悉VR技术和设备在开始制作适用于VR的作品之前,首先需要了解VR技术和设备的基本原理和功能。
VR设备通常由头戴式显示器(Head Mounted Display,HMD)、追踪设备和控制器组成。
熟悉这些设备的特点和工作方式将有助于你更好地设计和制作适用于VR的作品。
步骤二:选择合适的3D建模软件在制作适用于VR的作品时,选择一款适合自己的3D建模软件非常重要。
本教程以3Dmax为例进行讲解,因为3Dmax是一款功能强大且广泛使用的三维建模软件,它具备制作适用于VR的作品所需的基本功能和工具。
步骤三:确定制作的作品类型和风格在使用3Dmax制作适用于VR的作品之前,需要明确自己制作的作品类型和风格。
是制作一个虚拟场景、一个建筑模型还是一个角色模型?是选择写实风格还是卡通风格?这些都需要在开始制作之前进行计划和决策。
步骤四:进行模型建立和调整在3Dmax中进行模型的建立是制作适用于VR的作品的第一步。
你可以使用3Dmax提供的基础几何体工具进行建模,也可以导入其他软件或者下载的模型进行调整和优化。
在建立模型的过程中,需要密切关注模型的细节和比例的准确性,以确保在VR环境中呈现出逼真和舒适的效果。
步骤五:贴纹理和渲染模型建立完成后,下一步是给模型贴上适当的纹理。
3Dmax提供了丰富的纹理和材质库,可以根据自己的需要选择合适的纹理进行贴图。
在VR环境中,贴图需要考虑到视觉效果和性能的平衡,以达到更好的用户体验。
完成纹理贴图后,可以进行渲染,调整光照和阴影效果,以增强作品的逼真感。
3ds MaxVRay全套室内效果图制作完全剖析课件+制作各种室内灯具

(时间:4学时)
第8章 制作各种室内灯具
8.1 8.2 8.3 8.4 8.5 8.6 8.7 8.8
现代玻璃吊灯 欧式客厅吊灯 欧式餐厅吊灯 筒式壁灯 锥式壁灯 欧式台灯 中式落地灯 圆筒灯
8.1 现代玻璃吊灯
【制作难度】:★★☆☆☆ 【应用方向】:现代玻璃吊灯以简约风格为主,令人感到随性、自然,主要用于书
图8-8
8.5 锥式壁灯
【制作难度】:★★☆☆☆ 【应用方向】:锥式壁灯造型古朴端庄,多置于客厅。 【案例文件】:随书附带光盘CDROM/Scene/cha08/锥式壁灯.max 【视频教程】:随书附带光盘
CDROM/视频/ cha08/8.5锥式壁灯 .swf 本例介绍使用管状体施加 FFD4×4×4、涡轮平滑修改器制作灯 罩模型,使用线创建图形施加车削修改 器制作灯罩座模型,使用可渲染的样条 线制作支架模型,使用切角长方体制作 墙座模型,完成的模型效果如图8-9所 示。
图8-6
8.4 筒式壁灯
【制作难度】:★★☆☆☆ 【应用方向】:筒式壁灯造型简单、
淡雅、自然,多置于卧室床头两侧的墙 壁。 【案例文件】:随书附带光盘 CDROM/Scene/cha08/筒式壁灯 .max 【视频教程】:随书附带光盘 CDROM/视频/ cha08/8.4筒式壁灯 .swf 本例介绍使用管状体施加编辑多边 形修改器制作灯罩模型,使用切角圆柱 体制作底座模型,使用圆柱体制作杆架 模型,使用线创建图形施加车削修改器 制作灯槽模型,完成的模型效果如图87所示。
房、餐厅、装饰吧台等的照明。 【案例文件】:随书附带光盘 CDROM/Scene/cha08/现代玻璃吊灯 .max 【视频教程】:随书附带光盘 CDROM/视频/ cha08/8.1现代玻璃吊 灯.swf 本例介绍使用线创建图形施加车削修 改器制作灯罩、灯槽、灯泡模型,使用 可渲染的样条线制作电线模型,完成的 模型效果如图8-1所示。
浅析3DSMAX-VRAY场景空间中灯光技术的应用方法

浅析3DSMAX-VRAY场景空间中灯光技术的应用方法3DSMAX是一款非常流行的三维建模和渲染软件,而VRAY则是3DSMAX中常用的渲染引擎。
在3DSMAX-VRAY场景中,灯光技术的应用是非常重要的,它直接影响到场景的渲染效果和氛围营造。
本文将从灯光的基本原理和VRAY中的灯光类型开始,剖析在3DSMAX-VRAY 场景中灯光技术的应用方法。
一、灯光的基本原理在3DSMAX-VRAY场景中,灯光的作用是模拟现实世界中的光源,为场景提供光照。
灯光在渲染中起着至关重要的作用,它能够为整个场景增添氛围和情感,烘托出主题和重点。
在光线的传播中,有三个主要的光线成分:漫反射光、镜面光和环境光。
漫反射光代表了光线在物体表面上的传播,镜面光代表了物体表面的高光反射,而环境光代表了场景中的整体光照。
在3DSMAX-VRAY场景中,我们可以通过控制灯光的属性和类型,来模拟这些光线成分,从而达到渲染出真实感和美感的效果。
二、VRAY中的灯光类型在VRAY中,有多种灯光类型可供选择,每种类型都有不同的特点和适用场景。
下面介绍几种常见的灯光类型:1. 点光源:点光源是一种从单个点或单个对象发出的光源,它的光线是均匀的,可以用于模拟室内灯光或者夜景中的路灯等。
2. 方向光:方向光是一种无限远的、平行的光源,它的光线是平行的,不会随着距离的增加而衰减,可以用于模拟太阳光或者月光等。
3. 环境光:环境光是一种可以均匀地照亮整个场景的光源,它不存在光线传播的方向和距离,可以用于增强整个场景的光照效果。
4. 矩形灯:矩形灯是一种可以自定义大小和形状的灯光,它可以模拟各种现实世界中的光源,比如天花板上的灯带、车库里的日光灯等。
除了以上几种常见的灯光类型,VRAY还提供了其他多种类型的灯光,比如IES灯、光线、灯带等,可以根据需要选择合适的灯光类型。
三、灯光技术的应用方法在3DSMAX-VRAY场景中,灯光技术的应用方法非常重要,它直接影响到整个渲染效果和场景的表现。
高教社2024VRay 6.0+3ds Max 2024室内效果图案例教程(第3版)课件第5章 灯光

• 5.3 标准灯光
5.3.2 目标平行光
【目标平行光】可以产生一个照射区域,主要用来模拟自然光线的照射 效果,主要用来模拟自然的照射效果,常用该灯光模拟室内外日光效果。
【太阳定位器】是3ds Max使用频率较高的一种的灯光,配合 Arnold 渲 染器使用,可以非常方便地模拟出自然的室内及室外光线照明。在【创建 】面板中单击【太阳定位器】按钮可以在场景中创建出该灯光。
• 5.2 光度学灯光 实例--利用目标灯光制作筒灯效果
• 5.3 标准灯光
5.3.1 目标聚光灯
• 5.1 灯光常识
5.1.1 什么是灯光
灯光主要分两种:直接灯光和间ห้องสมุดไป่ตู้灯 光。
直接灯光主要泛指那些直射式的光线 ,如太阳光等。光线直接散落在指定的位 置上并产生投射,直接而简单。
间接灯光在气氛营造上则能发挥独特 的功能性,营造出不同额意境。它的光线 不会直射的地面,而是被置于灯罩、天花 板后,光线被投射到墙上再反射至沙发和 地面,柔和的灯光仿佛轻轻地洗刷整个空 间,浪漫而温柔;这两种灯光适当配合才 能缔造出完美的空间意境。有一些明亮活 泼,又有一些浪漫柔和,才能透过当中的 对比表现表现出灯光的特殊魅力,散发出 不凡的意韵。
• 第5章 灯光
光线是画面视觉信息与视觉造型的基础,没有光也无法体现物体形状和质感。 光的应用是效果图表现过程中强有力的手段,灯光的合理运用能够突出室内外建筑 的空间层次感和纵深感,通过不同光的表现能够使人的心理产生不同的感受。灯光 在三维表现中显得尤为重要,3ds Max中的灯光类型分为标准灯光、光度学灯光和 Arnold灯光,可以模拟真实世界中的各种灯光,比如室内的灯光、室外的太阳光以 及化学反应的光等。
3Dmax虚拟现实教程:了解如何在3Dmax中制作适用于虚拟现实设备的场景和模型

3Dmax虚拟现实教程:了解如何在3Dmax中制作适用于虚拟现实设备的场景和模型在如今科技迅速发展的时代,虚拟现实(Virtual Reality,简称VR)已成为人们争相追捧的新兴技术。
越来越多的企业和个人开始利用VR技术创作各种场景和模型。
而作为一款强大的三维建模软件,3Dmax也被广泛运用于制作适用于VR设备的场景和模型。
本文将为您详细介绍如何在3Dmax中制作适用于虚拟现实设备的场景和模型,具体步骤如下:1. 了解虚拟现实技术的基本原理和应用领域- 虚拟现实技术通过计算机生成的环境模拟,使用户能够与虚拟环境进行交互。
- VR技术广泛应用于游戏、教育、医疗等领域,为用户提供身临其境的体验。
2. 熟悉3Dmax软件的基本操作和界面- 下载并安装3Dmax软件,学习基本的操作技巧和快捷键。
- 熟悉软件菜单、工具栏和视图控制目录,以及如何在3Dmax中创建场景和模型。
3. 创建适用于虚拟现实设备的场景- 打开3Dmax软件,点击"创建"并选择"建模"选项。
- 在视图窗口中创建一个合适的场景大小,可以是一个室内场景或户外景观。
- 添加适当的光照效果,以确保场景在虚拟现实设备中有舒适的展示效果。
- 创建并调整场景中的各个元素,如墙壁、家具、植物等,使其适应虚拟现实环境中的尺寸和比例。
4. 制作适用于虚拟现实设备的模型- 在3Dmax中选择适合的模型制作方法,如多边形建模、NURBS建模或体素建模。
- 使用各种工具和技巧来实现所需的模型形状和细节。
- 注意模型的细节要足够清晰,以确保在虚拟现实设备中呈现出真实感和逼真度。
- 确保模型的流畅性和性能要求,避免过多的多边形或模型负荷过重。
5. 导入场景和模型到VR设备中- 在3Dmax中选择"导出"选项,并将场景和模型导出为适用于VR设备的格式,如FBX或OBJ。
- 将导出的文件传输到VR设备中,可以连接到计算机或使用无线传输方式。
3dsMax和VRay创建超酷的霓虹灯效果

3dsMax和VRay创建超酷的霓虹灯效果
核⼼提⽰:使⽤软件:3ds Max、VRay查看原图(⼤图)图01在本教程中,你将学习关于如何实现霓虹灯效果,3ds Max和VRay创建超酷的霓虹灯效果,我将告诉你如何从⼀个模型,字体neons,第1步先输⼊⽂本“Neona”,并将其转换为可编辑样条,然后模拟⼀个真实霓虹灯效果的⽅法,最后
使⽤软件:3ds Max、VRay
3ds Max和VRay创建超酷的霓虹灯效果
查看原图(⼤图)
图01
在本教程中,你将学习关于如何实现霓虹灯效果。
我将告诉你如何从⼀个模型,字体neons,然后模拟⼀个真实霓虹灯效果的⽅法。
最后,介绍如何正确设置材质,使⽤VRay渲染和Alpha 通道设置。
第1步
先输⼊⽂本“Neona”,并将其转换为可编辑样条。
(图02)
3ds Max和VRay创建超酷的霓虹灯效果
查看原图(⼤图)
图02
第2步
将线调整为单⼀的线路。
(图03、图04)3ds Max和VRay创建超酷的霓虹灯效果
查看原图(⼤图)
图03
3ds Max和VRay创建超酷的霓虹灯效果。
浅谈虚拟现实中的VRML技术在夜景灯光中的应用
clr oo
该字段 的功能 是控 制光线 的颜色 ,以 RB三原 色的方 G 式控制光 线颜色 ,默认值 为 (, 1 ) 1 ,1。
itn iy ne st
该字段 的功能 是控 制光源 的光线 强度 。默 认值 10 .,
在V m 中P i t ih 节点语 法定 义 : r l onL gt P it ih { o n L g t
ep sd il xo eF ed S Fo t F la
O n
该字段是 ~个布尔 值。TU 表 示光线是 打开 的,这是 RE
默 认值 ;F LE表示光线 是关 闭的。 AS
该 字段 的功能是定 义局域 坐标系统 下光源 的位置 ,默 认值为 ( ,0 ) 0 ,0 。
Vm 中 含 有 P itih 点 光 源 ) 、Dr c inl ih 定 向光 源 ) 、 rl onL gt( ie t0a Lg t(
SoL gt ( 光 灯 光 源 ) 这 三 个 光 照 效 果 节 点 下 面 简 单 介 绍 p t ih 聚 P itih 点光源在 vm 中的语 法 o nLg t rl
互性和插补器控制场景灯光 的开关 、颜色 和方向的变化 ,使虚拟三维 夜景 中灯光产生千变万他 的效果 虚拟 现实三维虚拟场景为大型场景灯光设计提供 了一个很好 的平台,发展前景非常广阔,对场景灯光 的开发 设计 具有 重要的意义 。 关键 词: 虚拟现实:交互性:夜景灯光 ;V M RL 中图分类号:T 3 文献标识码 :A 文 章编号 :1 7 - 7 9 2 1 )0 2 0 9 0 P 6 1 5 7(0 0 7 0 3 - 2
3DMAX技术应用于虚拟现实交互设计的案例分享
3DMAX技术应用于虚拟现实交互设计的案例分享3DMAX技术应用于虚拟现实交互设计的案例分享虚拟现实(Virtual Reality,简称VR)是一种通过计算机生成的仿真环境,将用户置身于虚拟的三维空间中,并通过头戴式显示器等设备实现身临其境的感受。
虚拟现实技术的发展已经广泛应用于娱乐、教育、医疗等领域。
在虚拟现实交互设计方面,3DMAX技术正发挥着重要的作用。
本文将通过分享几个案例,来探讨3DMAX技术在虚拟现实交互设计中的应用。
案例一:建筑设计与体验虚拟现实为建筑设计师提供了一个全新的展示平台。
通过3DMAX技术,可以将建筑模型以更加真实、逼真的方式呈现给用户,使用户能够身临其境地感受到建筑设计的细节。
在虚拟现实中,用户可以自由漫游于建筑空间,与建筑进行互动。
例如,在一个商业广场的设计中,通过虚拟现实交互设计,用户可以漫游于商铺之间,模拟购物的过程,甚至可以用手势来操作虚拟商品。
这种交互方式为商家和用户提供了更加直观、真实的体验。
案例二:游戏设计与体验对于游戏设计来说,虚拟现实的应用非常广泛。
通过3DMAX技术,游戏开发者可以打造出逼真的游戏世界,使玩家感受到身临其境的游戏体验。
例如,在一款冒险类游戏中,虚拟现实技术可以将玩家置身于一个神秘的世界中,通过3DMAX技术打造出逼真的场景、人物和物品。
玩家可以亲自体验冒险的感觉,与游戏中的角色进行互动,并通过手势和声音等方式来操控游戏。
案例三:教育与培训虚拟现实在教育领域的应用越来越广泛。
通过使用3DMAX技术,可以打造出逼真的教学场景,为学生提供实践性的学习体验。
例如,在医学教育中,可以使用虚拟现实技术来模拟手术操作,让学生通过虚拟手术实践,熟悉真实手术的流程与技巧。
在职业培训中,也可以利用虚拟现实技术呈现出实际工作环境,让学员能够真实感受到工作的场景。
这样的教育方式不仅提升了学习者的参与度,也提高了教学的效果。
总结通过以上案例的分享,我们可以看到,3DMAX技术在虚拟现实交互设计中发挥着重要的作用。
3DMAX+与虚拟现实Vrml

3DMAX 与虚拟现实Vrml2007年05月07日星期一 20:383D Studio MAX 是 Autodesk 公司在 Windows 95/NT 环境下全面重新开发的一个动画制作产品,它具有一流的三维建模和动画制作功能,使用它可以在 PC 机上得到真正的工作站动画软件的性能和图像质量,因而深受广大用户的喜爱。
2. 2 VRML 2.0 Helpers有 VRML 编程经验的读者知道,用 VRML 建立复杂三维模型是相当繁难的,而且毫无直观性可言,而 3D Studio MAX 因其强大的三维建模和动画制作功能恰好可以弥补 VRML 这方面的不足。
为了更好地、更全面地支持 VRML 2.0,3D Studio MAX 还提供了 VRML 2.0Helpers 以帮助建立 VRML 世界,它包含了几乎全部的 VRML 特有造型,极大地方便了 VRML 世界的建立。
启动 3D Studio MAX 后,单击命令面板中的 Create,再单击次级面板中的Helpers,在下拉式组合框中选取 VRML 2.0,这时命令面板上出现了 12 种 VRML 特有造型。
1) Anchor。
Anchor 用来创建虚拟空间中的一个锚点造型,它用于 VRML 世界之间的链接。
点击锚点造型将引导 VRML 浏览器顺着链接检索出该链接所连的 VRML 文件。
这样当你漫步于 Internet时,你可以很方便地从一个虚拟空间跨入另一个虚拟空间。
2) TouchSensor。
TouchSensor 用来创建虚拟空间中的一个接触传感器造型,它用于检测参与者的动作并将其转化为适当的输出以触发一段动画。
这样当你将鼠标移到该造型或从该造型上移开时,就会开始或停止一段动画。
3) ProxSensor。
ProxSensor用来创建虚拟空间中的一块不可见的长方形区域,该区域可以感知参与者的进入、离开以及参与者在该长方形区域中移动的时间等,以此来触发一段动画或声音。
如何在3DMax中制作虚拟现实环境

如何在3DMax中制作虚拟现实环境虚拟现实(Virtual Reality,简称VR)是一种能够创造出仿佛置身于真实世界中的沉浸式体验的技术。
在虚拟现实环境中,人们可以通过佩戴VR头盔或使用其他设备,与虚拟世界进行互动。
3DMax是一款常用的三维建模软件,也可以用来制作虚拟现实环境。
本文将详细介绍在3DMax中制作虚拟现实环境的步骤。
1. 规划虚拟现实场景- 确定虚拟现实环境的主题和背景,比如游戏场景、旅游景点等。
- 确定虚拟现实环境的大致规模和布局。
- 设计虚拟现实环境中的物体、建筑等元素。
2. 创建基础模型- 在3DMax中创建一个新项目,设置合适的单位和尺寸。
- 使用3DMax的建模工具,创建虚拟现实环境中的基础模型,如地形、建筑等。
- 注意模型的细节,确保其与虚拟现实环境的主题相符合。
3. 添加材质和纹理- 在3DMax中选择合适的材质和纹理,为模型添加真实感。
- 使用材质编辑器对模型进行调整,调整颜色、光照等参数。
- 为不同的物体和建筑赋予不同的材质,以增加场景的多样性。
4. 添加光源- 在3DMax中添加合适的光源,以增加虚拟现实环境的逼真程度。
- 调整光源的颜色、强度和角度,以达到理想的光照效果。
- 注意光源的位置和布局,保证场景中的物体能够得到合适的照明。
5. 导入模型和动画- 通过3DMax的导入功能,将已经制作好的模型和动画导入到虚拟现实环境中。
- 调整导入的模型和动画的尺寸和位置,使其融入到场景中。
- 添加适当的动画效果,如移动、旋转等,以增加场景的交互性和动感。
6. 创建交互元素- 在虚拟现实环境中添加交互元素,如按钮、触发器等。
- 使用3DMax中的交互设计工具,为交互元素添加合适的功能和动画效果。
- 确保交互元素与场景中的其他元素具有良好的协调性和互动性。
7. 优化性能和体验- 对场景中的模型和动画进行合理的优化,以提高虚拟现实环境的运行效果。
- 考虑场景中的视角和移动方式,确保用户在体验过程中感到舒适。
使用3DS Max进行虚拟现实开发的技巧

使用3DS Max进行虚拟现实开发的技巧虚拟现实(VR)技术正在成为一种越来越受欢迎的体验方式,它可以提供一种身临其境的感觉,让用户感觉自己置身于一个完全不同的世界。
而在虚拟现实开发的过程中,3D建模软件3DS Max是一款非常强大和常用的工具。
在本文中,我将详细介绍使用3DS Max进行虚拟现实开发的技巧与步骤。
技巧一:模型制作与优化步骤1:创建基本模型首先,我们需要在3DS Max中创建基本的模型。
可以使用基本的几何体或通过导入现有的3D模型来完成。
在创建过程中,需要确保模型的细节和比例准确,并注意模型的面数不要过高,以免影响性能。
步骤2:材质和纹理为了使模型更加真实和逼真,需要为其添加适当的材质和纹理。
3DS Max提供了丰富的材质和纹理库,也可以通过自定义纹理来实现。
在选择纹理时,需要考虑到性能问题,尽量选择较小的纹理文件以保证流畅的运行。
步骤3:优化模型为了提高性能和流畅度,需要对模型进行优化。
可以尝试减少模型的面数、合并重复的顶点和边缘,以及减少不必要的细节。
还可以使用3DS Max提供的优化工具进行模型优化。
技巧二:场景设计与构建步骤1:场景布局在创建虚拟现实场景时,需要合理布局各种元素。
根据需求和视觉效果的要求,将模型、灯光、相机等放置在合适的位置,并调整其大小和角度,以实现期望的效果。
步骤2:灯光设置灯光在虚拟现实场景中起着至关重要的作用。
通过合理设置灯光,可以为场景提供合适的氛围和明暗效果。
在3DS Max中,可以选择不同类型的灯光,并调整其颜色、强度和方向等参数。
步骤3:特效添加为了增加场景的趣味性和互动性,可以添加各种特效。
比如,可以在场景中添加烟雾、雨水、火光等特效,通过调整参数实现期望的效果。
技巧三:动画制作与优化步骤1:关键帧动画虚拟现实场景通常需要一些动画元素,包括人物、物体或相机的运动。
通过设置关键帧和插值来实现简单而精确的动画效果。
在设置关键帧时,需要仔细选择动画帧的位置和时间间隔。
3DSMAX建模教程灯座
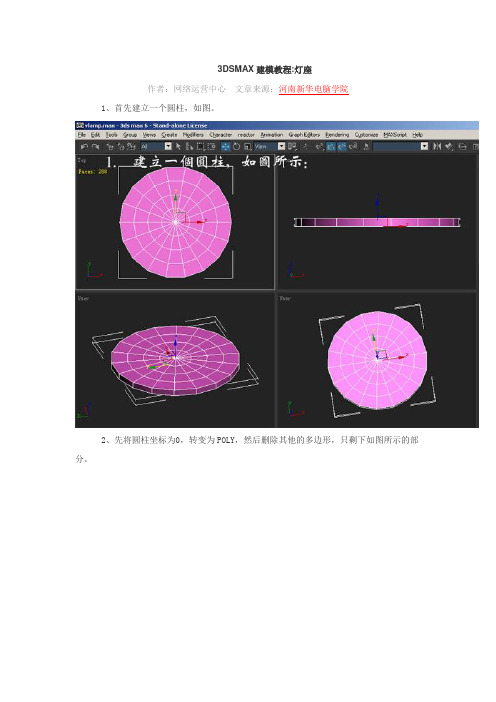
3DSMAX建模教程:灯座作者:网络运营中心文章来源:河南新华电脑学院1、首先建立一个圆柱,如图。
2、先将圆柱坐标为0,转变为POLY,然后删除其他的多边形,只剩下如图所示的部分。
3、添加对称修改器,旋转他的mirror对称复制,在旋转之前先修改捕捉角度到10度,如图。
4、继续对称工具的应用。
5、继续对称工具的应用,如图设置。
6、继续对称工具的应用,如图设置。
7、还是进行对称操作,如图。
8、然后进入物体的点编辑状况,并调节侧面,大体成下图的样子。
9、注意在调整点的时侯尽量只沿着Z轴移动或者在移动点的时侯,我们可以选择在自己所在的边上移动,这样最后对称以后我们才可以得到正确的效果。
10、效果如图。
11、选中如图的边,然后对他均分(connect=2)。
12、调整其中的点然后给它选择如图的面,并进行拉伸,得到如图效果。
13、选择如图的一圈边,然后继续均分。
14、细细调整点到如图的样子。
15、对如图的边进行倒角,然后对红线部分进行切分(connect=1)。
16、利用倒边和切边工具进行相应操作,然后对点继续调整到如图的效果。
17、继续对选中的多边形进行拉伸,如图。
18、选择如图的面进行删除,为了便于后面的修改。
同样也删除后面。
19、效果如图。
21、继续增加细节,加边调节。
21、选择如图的面进行拉伸,然后删除两边的面。
22、看结果,出现这样的原来是点做对称的时侯距离太远了,默认的对称的值太小不能将他们焊接起来,我们可以调整点的位置让他能够焊接起来。
23、接下来是将这个物体转变为POLY继续修改。
24、现在进行底面处理,选中如图的55个点,缩小一个小,然后进行焊接,再细分几个边。
25、对如图的边进行拉伸到自己满意为止。
26、进行拉伸。
27、得到的效果如图。
使用3DMAX进行虚拟现实VR和增强现实AR设计

使用3DMAX进行虚拟现实VR和增强现实AR设计使用3DMAX进行虚拟现实VR和增强现实AR设计近年来,虚拟现实(Virtual Reality,VR)和增强现实(Augmented Reality,AR)技术在各个领域得到了广泛应用。
而在进行VR和AR设计时,3DMAX作为一款功能强大的软件工具,成为了设计师们的首选。
本文将探讨如何使用3DMAX进行虚拟现实VR和增强现实AR设计,并分享其中的技巧和应用场景。
一、了解3DMAX软件在开始进行虚拟现实VR和增强现实AR设计之前,首先要对3DMAX软件进行了解。
3DMAX是一款由美国Autodesk公司开发的三维计算机图形软件,它提供了丰富的建模、渲染、动画和后期制作等功能,非常适合进行VR和AR设计。
二、虚拟现实VR设计1. 设置合适的场景虚拟现实VR设计的第一步是设置合适的场景。
可以根据实际需求,选择不同的场景设置,比如室内、室外、自然环境等。
在3DMAX中,可以通过创建物体、添加材质、调整光照等方法来打造一个逼真的虚拟环境。
2. 创建虚拟物体在虚拟现实VR设计中,创建虚拟物体非常重要。
可以利用3DMAX提供的建模工具,进行建模、雕刻、布料模拟等操作,将所需的物体模型建立起来。
同时,还可以通过导入外部模型文件,使虚拟环境更加真实。
3. 添加交互功能虚拟现实VR设计的目的是让用户能够与虚拟环境进行交互。
因此,在设计过程中,需要添加一些交互功能,比如手势识别、物体操作、触摸感应等。
3DMAX提供了丰富的插件和脚本,可以方便地实现这些功能。
三、增强现实AR设计1. 选择增强现实技术在进行增强现实AR设计时,需要选择合适的增强现实技术。
目前主要有标记增强现实、位置增强现实和追踪增强现实等技术可供选择。
根据设计的要求和实际应用场景,选择适合的技术来实现增强现实效果。
2. 设计增强现实内容设计增强现实内容是增强现实AR设计的重要环节。
通过3DMAX软件,可以创建虚拟物体,并将其与真实环境进行融合,实现虚拟与现实的交互。
3DSMAX在虚拟现实技术中的应用
点 ,主要 用 来 加 入 程 序 脚 本 语 言 ( 如 J a v a ,J a v a S —
c r i p t o通过对这些 节点进行编程控制实现 动态 交互 。
C h i l d r e n[
D E F t r e e l S h a p e{ A p p e a r a n c e A p p e a r a n c e{
Tr a n s l a t i o n 1 0 0 ~1 3 8 0
景中的一 切都 看 作是 节 点 ,V R ML提供 了 5 4个 结 点
来构建 场景 ,一般要构造一 个交互性 的虚拟 场景 主要
用 到以下三类节点 :造 型节 点 ,用来 构造虚 拟场景 的 外观 ;探测器节 点 ,用 来感 知 用 户 的操作 ;S c i r p t 节
O. 1
比如对用 户动作 的探察 ,V R ML传感 器 所 能感受 到的用户 的动作 包括用 户在场 景 中的 鼠标 的操作 ,以
及通过浏览器 的视点控 制在场 景 中的漫游 。可 以通过 给出中心和尺寸指定一个 由 P r o x i m i t y S e n s o r 节点感知 的
的 ,否则不 能挤 出封 闭 的几 何 体 。进 入修 改 命 令 面 板 ,对道路 接合 不 准 确 的地 方 进行 调 整 ,最 后 用 挤 出命令 将道 路挤 出一定 高度 。 植 物 、路灯及 围栏 的制 作可分 为多种情 况 。地 面 植 被可 以简单 的为地面赋上绿 色 的贴 图 ,再给 它加上
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二、对座灯零件进行外观处理
对于第一种情况,可以制作或另找其他合适的图片来替代被引用的贴图。 对于第二种情况,可在Vrmlpad编辑软件中打开它们的脚本文件,在资源查 看窗口(Resource)中找到相应贴图文件名,直接双击后按贴图文件保存 的实际路径、文件名进行修改即可(多处引用该贴图文件相关节点的代码 都会同时自动被修改),如图3-7-6所示。如果贴图与VRML脚本文件放在同 一文件夹,代码里只需给出文件名即可。
三、对灯泡、开关和手型支架零件进行关联和交互动作处理
3.设置开关旋转交互
本例对灯的控制开关是采用旋转式开关控制方式,开关的旋转动作是绕灯的垂直 主轴线进行的。先打开开关造型文件“kaiguan-1.wrl”并在代码的开头作如下旋 转交互设置:
DEF
kaiguan
#以“kaiguan”为名定义开关圆柱旋转交互节点
图3-7-3 要导出的开关、支架一、支架二零部件
图3-7-4 要导出的手型支架部件
一、对从3DS MAX软件导出的座灯零部件VRML脚本文件进行优化
从3DS MAX软件导出的每个VRML脚本文件会含有不必要的节点命名DEF定义、 光源节点、计时器节点、版本说明等定义和信息,造成脚本代码有无用冗 余,它们占据了文件空间影响以后脚本运行和网络传输,应该先作相应的 清除处理。 运行编辑软件Vrmlpad打开VRML脚本文件后点击下拉菜单【Tools】项,在 下会看到有【修改工具】栏,从该栏的下级菜单【代码】下点取【优化代 码】项,即可对当前打开编辑的VRML脚本文件进行优化,去除冗余代码。
三、对灯泡、开关和手型支架零件进行关联和交互动作处理
4.插入脚本节点 由于在对灯的开与关控制操作是在同一个开关中进行的,第一次转动开关实现开灯, 第二次转动开关实现关灯,需要用程序去控制开关,交替传递开或关的状态,本例 运用建立vrmlscript语言脚本节点的方式来实现这一过程,该脚本节点定义名为 “dkg”。因本书篇幅有限对脚本节点和vrmlscript语言不作详细的介绍,直接引 用即可。本例具体的脚本节点代码如下: DEF dkg Script {
二、对座灯零件进行外观处理
从3DS MAX软件导出的VRML脚本文件都已经带有外观节点(Appearance)的 设置,在3dmax中如果做过贴图处理。导出时也会带有贴图节点 (ImageTexture)。3DS MAX对VRML模型的导出是整体性的,不像UG那样分 成很多面,因此对独立的零件造型外观处理一次性设置就可完成。
Transform { translation .2603 586.3 .004042 children [ #原来代码
DEF kg CylinderSensor { } ,
#定义以“kg”为名的圆柱传感器
然后复制除文件头外的全部代码,将复制的代码粘贴到前面做好的手型支架文件
“shouzhijia-1.wrl”代码的最后面。
DEF guang on FALSE
SpotLight {
direction 0 0 1 intensity 1 radius 50000 ambientIntensity 1 color 1 1 1 location 0 0 -100 beamWidth 0.7 cutOffAngle 1.0}
完成设置后将代码按原文件名 保存以便后面的应用
field SFBool on TRUE eventIn SFBool set_active eventOut SFBool on_changed
url "vrmlscript: function set_active( b, tm ) { if ( b == FALSE ) return; if ( on == TRUE ) on = FALSE;
图3-7-5 Vrmlpad的代码优化菜单项
一、对从3DS MAX软件导出的座灯零部件VRML脚本文件进行优化
从3DS MAX软件导出的VRML脚本文件经处理后还会带有不必要的时间传感器 节点,可在Vrmlpad编辑器的场景树查看窗口(SceneTree)中找到时间传 感器节点,用光标标定后按【Delete】键将该节点删除。 经过处理冗余的文件应该换名保存,如“dizuo.wrl”文件可存成“dizuo1.wrl”将原来的文件保存下来以备万一出现不测情况时还可调出重新修改。
带灯泡的手型支架绕水平轴旋转的交互动作由VRML的圆柱传感器定义来设 定。由于圆柱传感器只能控制以铅垂轴(平行Y轴)为回转轴的旋转,所以 要先将整个部件绕Z旋转将手型支架的旋转水平轴转成铅垂轴,在设定了旋 转交互动作后再把它们回转回原状态。
三、对灯泡、开关和手型支架零件进行关联和交互动作处理
具体设置的代码编写详情如下:
ROUTE kg.rotation_changed TO kaiguan.rotation 将名为“kg”的圆柱传感器感应到的用鼠标交互拖动开关时的旋转角度,通过该传 感器“rotation_changed”输出接口传送到定义名为“kaiguan”的圆柱旋转交互 节点“rotation”旋转域中,实现开关按拖动的角度旋转。
{maxAngle 1.0 minAngle -1.57} #设定手型支架的旋转角度范围
Transform { rotation 0 0 1 1.57 center -42 733 0 #旋转部件使转轴垂直
children [ #(放置原来脚本全部代码)
]}
]}
]}
完成以上设置后将结果按原手型支架文件“shouzhijia-1.wrl”保存。
三、对灯泡、开关和手型支架零件进行关联和交互动作处理
5.设置路由 ROUTE kg.isActive TO dkg.set_active 将名为“kg”的圆柱传感器感应到用鼠标交互触动开关时的启动状态,通过该传感 器“isActive”输出接口传送到定义名为“dkg”的脚本节点“set_active”输入 接口中,激活脚本节点运行vrmlscript语言程序。
1.在灯泡脚本代码设置光源节点 2.设置手型支架旋转交互 3.设置开关旋转交互 4.插入脚本节点 5.设置路由
图3-7-7 灯泡、手型支架及开关组合
三、对灯泡、开关和手型支架零件进行关联和交互动作处理
1.在灯泡脚本代码设置光源节点 打开灯泡文件“dengpao-1.wrl”,在脚本代码第一个“children”域值最 前位置加入一个用“DEF”语句定义名为“guang”的锥光源,以便实现灯 发光的效果,该锥光源节点(SpotLight)有关域的域值设置如下:
本例介绍了怎样从3DS MAX中导出座灯的 VRML脚本代码、并对代码进行优化、以及 运用虚拟现实构造语言VRML的相关节点功 能,对座灯各部件进行外观设置、组合装 配、交互动作控制设置,生成虚拟可控座 灯的详细制作过程。
一、对从3DS MAX软件导出的座灯零部件VRML脚本文件进行优化
在3DS MAX软件中打开座灯的造型文件“RW座灯.max”,选择保留要导出的 零件,删除其他零件,在【文件】下拉菜单中选择【导出】项,在弹出的 【选择要导出的文件】对话框【保存类型】下拉框中选择【VRML97 (*.WRL)】格式,并进行文件名和文件存储路径的设置,如图3-7-1所示。
第三章 计算机辅助工业设计 表达实例
实例七 运用VRML和3DS MAX进行虚拟 现实制作——以座灯为例
实例七 运用VRML和3DS MAX进行虚拟现实制作——以座灯为例
案例介绍:
本例制作一个具有能实时实现开灯关灯、 绕灯杆水平轴旋转、绕灯柱垂直轴旋转和 平移灯整体四种交互动作的VRML虚拟座灯。
图3-7-8 在代码中设置锥光源
三、对灯泡、开关和手型支架零件进行关联和交互动作处理
2.设置手型支架旋转交互
打开手型支架文件“shouzhijia-1.wrl”,将经上述处理的灯泡脚本代码 全部复制粘贴到手型支架脚本代码的后面,这样灯泡就装配到了手型支架 的灯泡安装位置里了。因为在3DS MAX导出零部件时是在装配整体拆分出来 的,各零部件造型坐标都保存了相互的位置坐标关系,在零部件装配时不 需要再进行坐标变换,用简单的调入就可自行按装配位置进行装配。
图3-7-1 在3DS MAX中的导出设置
一、对从3DS MAX软件导出的座灯零部件VRML脚本文件进行优化
然后在弹出的【VRML97导出器】对话框选默认设置,逐个独立导出座灯的 七个零部件VRML脚本文件:dengpao.wrl(灯泡)、 dizuo.wrl(底座)、 xian.wrl(电源线)、kaiguan. wrl(开关)、zhijia1.wrl(支架一)、 zhijia2.wrl(支架二)、shouzhijia.wrl(手型支架)。为方便在网页调 用,VRML脚本文件用英文命名保存。
图3-7-2 要导出的灯泡、灯座、电源线零部件
一、对从3DS MAX软件导出的座灯零部件VRML脚本文件进行优化
然后在弹出的【VRML97导出器】对话框选默认设置,逐个独立导出座灯的 七个零部件VRML脚本文件:dengpao.wrl(灯泡)、 dizuo.wrl(底座)、 xian.wrl(电源线)、kaiguan. wrl(开关)、zhijia1.wrl(支架一)、 zhijia2.wrl(支架二)、shouzhijia.wrl(手型支架)。为方便在网页调 用,VRML脚本文件用英文命名保存。
图3-7-6 在Vrmlpad中修改贴 图文件路径和文件名