核电站水压堆一回路水温控制1
华龙一号一回路压力和温度运行限制曲线研究
华龙一号一回路压力和温度运行限制曲线研究摘要:一回路压力和温度运行限制曲线作为核电厂运行限值和条件的重要组成部分,对核电厂安全运行有重要作用。
文章给出了一回路压力和温度运行限制曲线的内容、绘制的流程和方法,并就华龙一号堆型给出了示例。
关键词:核电厂;一回路;温度;压力;运行限制;华龙一号1引言在核电厂初步设计阶段,总体设计的重点工作之一是确定核电厂设计安全原则和要求。
核能虽然是一种清洁、安全可靠的能源,但是一旦发生重大事故对人类和环境造成的危害要比其它工业项目造成的风险和危害来得严重,所以制定并落实核电厂安全原则和要求就非常必要。
本文就设计安全原则和要求之一的一回路压力和温度运行限制(以下简称大刀图)展开论述,给出其内涵和绘制方法,并以华龙一号堆型为例,就重要曲线给出示例。
2简介为保障电厂工作人员,群众和环境不致遭到超过国家规定限值的辐射照射和污染,并将辐射照射和污染减至可以合理达到的尽量低的水平,在核电厂设计过程中,要采取各种安全方法和设计措施,达到核电厂设计的安全原则要求。
为了确保核电厂安全运行,应从核电厂的厂址选择、设计、建造、运行等方面全面落实国家核安全局颁布的有关安全规定和导则。
有关安全准则和要求涉及到核电厂的纵深防御原则,辐射防护设计,可靠性设计,安全功能分级,对假想始发事件的分析和对策,设计限值,在役试验和检查,设备鉴定,质量保证,安全分析和评价等各方面的要求。
为保证核电厂安全运行,必须制定一组反映最终设计及对设备和人员要求的运行限值和条件。
并且在核电厂运行开始前报国家核安全当局批准。
制定核电厂的运行限值和条件是一项十分重要的设计工作,它是作为核电厂营运单位授权运行核电厂依据的一个重要部分。
它的作用是:⑴对核电厂在启动、功率运行、停堆过程及停堆状态,维修,试验和换料等各种正常运行方式和预计运行事件规定安全要求,防止核电厂发生可能导致事故工况的状态;⑵对保证所有安全系统,包括专设安全设施能在事故工况下执行功能的各种要求作出规定。
压水堆核电厂一回路水汽化学监督导则
压水堆核电厂一回路水汽化学监督导则
压水堆核电厂一回路水汽化学监督导则是指对压水堆核电厂的一回路水和蒸汽进行化学监督的规定和指导。
一回路水和蒸汽在核电厂中起着重要的作用,它们不仅用于冷却核反应堆,还直接接触到核燃料和其他核设备,因此其化学性质对核电厂的安全和运行稳定性具有重要影响。
一回路水和蒸汽的化学监督主要包括以下内容:
1. 水质控制:监督一回路水的化学成分,确保其符合规定的标准。
包括控制水中的溶解氧、氧化还原电位、硅、铁、铜、铅、镉等离子的浓度,防止水中的腐蚀、沉积和污染。
2. 蒸汽质量控制:监督蒸汽中的化学成分,防止蒸汽中的杂质对设备和管道的腐蚀和堵塞。
包括控制蒸汽中的溶解氧、硅、铁、铜、铅、镉等离子的浓度。
3. 水处理剂的使用和监督:核电厂通常使用一些化学品作为水处理剂,用于控制水中的腐蚀、沉积和污染。
监督水处理剂的使用和浓度,确保其在安全范围内使用。
4. 水和蒸汽的监测和分析:定期对一回路水和蒸汽进行取样,进行化学分析,了解其化学特性和质量情况。
监测结果用于评估水质和蒸汽质量的稳定性,并根据分析结果进行必要的调整和控制。
5. 废水处理:对一回路水的废水进行处理和排放,确保其符合环境保护的要求。
通过对一回路水和蒸汽的化学监督,可以保证核电厂的一回路系统的安全运行和设备的寿命,减少事故和故障的发生。
同时,也可以保护环境,防止化学污染物的排放。
压水堆核电站一回路主要活化腐蚀产物及水化学控制措施
压水堆核电站一回路主要活化腐蚀产物及水化学控制措施压水堆核电站一回路主要活化腐蚀产物包括铁、镍、铬等金属离子和铁锈颗粒,同时还有氢气和各种氧化物。
这些活化腐蚀产物会对核电站设备和管道造成损坏,同时对工作人员和环境也有潜在的危害。
为了控制活化腐蚀产物的形成和减少其对设备和环境的影响,压水堆核电站采取了一系列水化学控制措施。
其中包括:
1. 水质控制:核电站通过严格的水质控制,尽可能减少水中金
属离子和其他活化腐蚀产物的浓度。
2. 化学清洗:核电站定期对设备和管道进行化学清洗,清除附
着在表面的铁锈颗粒和其他污染物。
3. 电化学处理:核电站采用电化学处理技术,通过施加电流来
减少金属离子的生成,防止活化腐蚀的发生。
4. 加药控制:核电站在水中加入一定量的缓蚀剂和其他化学试剂,以控制水中活化腐蚀产物的生成和减少其对设备的损害。
通过这些水化学控制措施,压水堆核电站能够有效地控制活化腐蚀产物的形成和减少其对设备和环境的影响,保证核电站的安全运行。
- 1 -。
压水堆核电厂一回路水化学控制
、
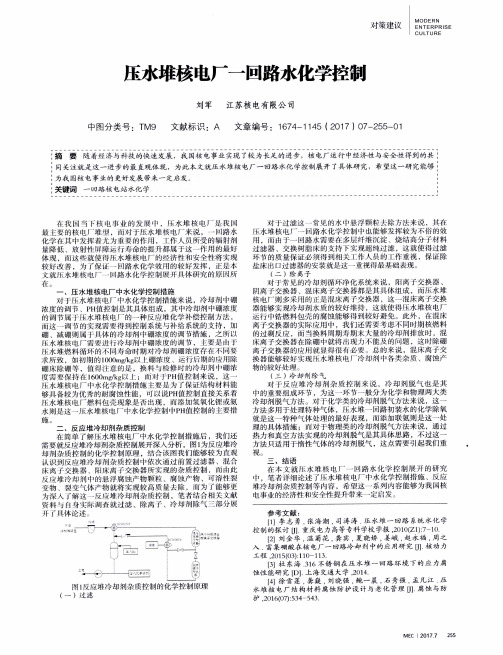
对 于 常 见 的冷 却剂 循 环 净化 系 统来 说 ,阳离 子 交换 器 、 离子 交 换 器 、混 床 离予 交 换器 都 是其 具 体组 成 ,而压 水 堆 核 电厂 则 多采 用 的 正是 混 床 离子 交 换器 ,这一 混 床 离子 交换 器 能够 实 现冷 却 剂 水质 的较好 维 持 ,这 就使 得 压水 堆 核 电厂 运行 中锆 燃料 包 壳 的腐 蚀 能够 得 到 较好 避免 。此 外 ,在 混床 离 子交 换 器 的实 际 应用 中 ,我 们 还需 要 考 虑不 同 时期 核 燃料 的过 剩 反 应 ,而 当换料 周 期 寿期 未 大 量的 冷却 剂 排放 时 ,混 床离 子 交 换器 在 除 硼 中就将 出现 力 不能 及 的 问题 ,这 时 除硼 离 子交 换 器 的应 用 就 显得 很 有必 要 … c j 、 的 来说 ,混床 离 子交 换 器 能 够较 好 实 现 压水 堆核 电厂 冷 却剂 l I 1 各类 杂质 、腐 蚀产
在。
对 于过 滤 这 一 常见的水r 恳 浮颗 札 太除 方法 来 说 ,其 在 水 堆 核 电厂 一 叫路 水 化学 控 制 t I , Ⅱ 土 能 够 发挥较 为 不 俗 的效 删 ,而 由 于一 回路 水 需 要在 多 层纤 维 沉 淀 、烧结 高 分 子材 料 过 滤 器 、交 换 树脂 床 的 支持 卜 实现 超 纯过 滤 ,这 就 使 得过 滤 环 节 的质 量 保 证必 须 得 到相 关 I 作 人 员的 工作重 视 ,保 证 除 盐 床 出 口过 滤器 的 安装 就足 这 一重视 得最 基础 表现 。
物 的较好 处理 。 ( 三 )冷 却 剂除 气
施。 二 、反 应堆 冷却 剂 杂质 控制
在 简单 了解 压 水堆 核 电 厂 中水 化 学控 制 措 施 后 ,我 们 还 需 要 就 反应 堆冷 却 剂杂 质控 制 展开 深入 分析 ,图 1 为反 应堆 冷 却 剂杂 质 控 制 的化 学 控制 原 理 ,结 合 该 图我 们 能 够较 为 观 认识 到 反 应堆 冷 却 剂 杂质 控 制 中依 次 通过 前 置 过 滤器 、混 合 床 离 子交换 器 、 床离 子 交 换器 所 实 现 的杂 质 控 制 ,而 } } 1 此 反廊 堆 冷 却 刹 I I l 的 悬 浮腐 蚀 产物 颗 粒 、腐 蚀 产 物 、可 溶 性 裂 变物 、裂 变气 体 产 物 就将 实 现较 高 质 量去 除 ,而 为 r 能 够 更 为深 入 了解 这 ・ 反 堆 冷 J 4 】 剂杂 质 控 制 ,笔 荇 结 合相 天 史献 资 料 一身 文际 渊 就过 滤 、除离 子 、冷却 剂 除 气 部 分腱 开 了具体 论述 , 、
海外某核电机组一回路水压试验实施
海外某核电机组一回路水压试验实施摘要:本文主要对海外某核电机组水压试验进行了描述,主要介绍了水压试验的技术条件,包括试验压力、试验温度、试验的水质要求和压力边界等,还介绍了水压试验的准备情况以及水压试验的试验过程和试验结果。
关键词:核电;水压试验;泄露检查;进度控制1 水压试验介绍核电厂一回路水压试验是对安装完毕的一回路系统冷态打压,以检查设备、管道的焊接质量,验证反应堆冷却剂系统压力边界的严密性和完整性。
水压试验是核电厂建设的一个重要里程碑,水压试验的完成标志着核电厂的核岛安装工作基本完成,核电厂全面进入调试阶段。
海外某核电机组反应堆冷却剂系统压力升至21.5MPa并保持稳定24 分钟无泄漏,一回路水压试验一次成功。
水压试验是一项要求很高试验项目,下面简单介绍一下水压试验的一些技术条件。
1.1 试验压力根据ASME 规范,强度性水压试验的试验压力应为设计压力的1.25 倍,改核电机组的一回路设计压力为17.2MPa,所以强度性水压试验的试验压力为21.5MPa。
在实际试验过程中,一回路中凡属于压力边界的第二道隔离阀均要打压至21.5MPa,以进行强度性验证。
1.2 试验温度在进行一回路水压试验时,必须避免系统内的温度低于压力边界内设备的脆性转变温度,根据ASME规范要求,规定水压试验温度应不低于承压部件材料的参考脆性转变温度加上33℃。
寿期初压力容器的 =-10℃。
即水压试验期间,一回路水温不能低于23℃。
实际在考虑水压试验温度时,需对压力容器母材、安全壳环境温度、补水温度等作综合考虑,该核电机组一回路水压试验选取的水压试验温度为55℃至65℃,同时确定在水压试验期间,金属壁温度应该大于42℃。
1.3水质要求水压试验的试验用水必须满足《海外某核电机组一回路反应堆冷却剂系统安全级设备水压试验技术条件》规定的水质要求,具体标准如表1.1所示:表1.1 水质等级及指标水压试验要求应充入A级水,同时在整个试验过程中,由于各种污染,水的纯度可能有所降低,但应保持不低于B级水的标准。
核电机组启动阶段的一回路水化学控制

核电机组启动阶段的一回路水化学控制摘要:压水堆核电站具有功率密度高、结构紧凑、安全控制容易、技术成熟、成本和发电成本相对较低的特点。
它是世界上使用最广泛的商用核电站,占轻水堆核动力机组总数的3/4。
高温高压轻水作为一回路冷却剂、慢化剂和二回路工作介质。
主系统冷却剂在强辐射条件下工作。
因此,核电站的水化学问题,如放射性污染、设备和材料的腐蚀、水质的保证和控制等变得非常复杂和严重。
多年来,国内外许多研究机构或专家对核电站水化学进行了大量的研究工作。
通过对水化学的控制,减少了腐蚀和放射性污染,从而维护了反应堆的运行安全,提高了核电站的可用性,效果显著。
关键词:核电机组;启动阶段;一回路;水化学控制1、前言作为包含核心的系统回路,系统设备长期处于高温、高压、高辐射环境中。
为了保证系统设备在使用寿命期内安全可靠地运行,水化学控制是必不可少的。
一次水化学主要从两个方面影响机组的运行安全:一是影响一次回路边界的完整性;二是影响堆芯外的辐射剂量水平。
实践表明,为了提高一回路水化学控制水平,减少腐蚀,减少放射性污染,除加强正常运行期间水质的监督控制外,机组启动阶段的水质控制也显得尤为直接和必要,对后续机组正常运行时的水化学有着直接而深远的影响。
2、启动期间的水化学指标机组启动时,通常只进行热态试验或大修,所有重要设备和管道容器长期处于停(备)开状态,不可避免地会产生大量杂质和腐蚀。
应严格控制含氧量及其它各项指标,尤其是含氧量高的水质指标。
2.1溶解氧氧本身是一种活性腐蚀元素,也是其他元素腐蚀不锈钢的催化剂。
当温度超过120℃时,会引起不锈钢和燃料包壳的应力腐蚀。
因此,在反应堆冷却剂温度升至120℃之前,溶解氧含量必须控制在100μg/kg以内,因此在化学平台期间加联氨进行除氧,确保主系统和稳压器溶氧小于100μg/kg,否则应停止升温和机组上升,直到溶解氧合格为止。
2.2氢水在高辐射环境中的分解反应是可逆的。
加氢可以有效地抑制水的辐射分解,从而减少氧化产物的生成,使一回路系统处于还原环境中。
核电水位控制系统介绍

核电水位控制系统介绍压水堆核电厂由一、二次回路构成,蒸汽发生器在其中起到枢纽的作用。
蒸汽发生器的水位控制在核电站的安全运行中占有重要的地位。
稳压器水位控制系统是核电站另一个重要的控制系统,与核电站的安全、稳定、可靠运行有直接关系。
标签:压水堆;核电厂;核能1 核岛组成和运行原理核电厂是利用核能生产电能的电厂。
压水堆核电厂是由一回路(包括压水反应堆系统和反应堆冷却剂系统)、二回路(包括动力转换和蒸汽系统)、发电机系统、输配电系统、循环水及其他辅助配套系统。
流程图如下图1所示。
产生蒸汽的原理是核反应堆裂变释放的热能通过反应堆冷却剂传递给二回路。
压水堆核电厂反应堆冷却剂系统的构成如下图2,每一条压力压力容器上的封闭环路包括至少一台冷却剂泵、一台蒸汽发生器及其相应的管道。
蒸汽发生器将传递热量给水使之变成高温高压蒸汽,驱动汽轮机带动发电机组发电,在冷凝器内作功后的乏汽冷凝成水,凝结水泵将凝结水先输送至低压加热器经加热后进入除氧器,给水泵将除氧水送入高压加热器加热后再返回蒸汽发生器,形成水的循环利用。
2 稳压器水位控制系统2.1 稳压器水位控制系统的功能一回路压力的稳定由稳压器控制,冷却剂的变化由堆芯扰动和负荷的变化引起,导致载热剂体积的变化,一回路压力也将产生变化。
一回路压力太大将会产生严重后果,可能使整个回路处于危险的工况下,易管道爆管、设备因应力作用疲劳等事故。
水汽化,堆芯局部沸腾等是由于压力过低导致的,冷却剂和燃料元件的传热恶化,将会出现的危险是燃料元件融化。
所以一回路压力的稳定,维持在整定目标值的范围内直接影响核电厂的安全稳定运行,可见对稳压器压力控制的重要性。
通过稳压器水位的控制,使稳压器维持在一个适宜的水位定值上。
水位过高有失去压力控制作用的危险,也有可能出现安全阀进水的危险;水位过低有可能暴露加热元件而烧毁的危险。
电厂正常运行时,反应堆冷却剂系统除稳压器上部汽空间外,其余部分充满了水。
因此稳压器水位就代表了一回路的水装量。
材料与水化学第讲核电厂一回路水化学

中子反应
2
反 应 堆 中 主 要 的 中 子 核 反 应
反应物在冷却剂 中的存在
热中子 截面 Barn 0.0005 940 3838 1.81 0.01910-3 0.53 6 0890.65 1.48 16 0.38 13.3 2.5 1.14 19.9 37.5 4.4 15 1.5 0.08 0.05
各种粒子的核特性
The nuclear properties of particles
射线种类 a射线 b射线 g射线 质子(P) 中子(n) 氘(d) 氚(T) 裂变碎片(轻) 裂变碎片(重) 电荷数 +2 -1 0 +1 0 +1 +1 ~+20 ~+22 静止质量,原子单位 4.002675 0.000549 -1.007271 1.008665 2.014102 3.016050 ~95 ~139
天然 2H pH 控制剂 可溶性中子吸收剂 溶解空气, 联氨分解物 溶解空气或腐蚀产物 溶解空气或腐蚀产物 23 Na(n, g)24Na 杂质 36 Ar(n, g)37Ar 溶解空气 40 Ar(n, g)41Ar 溶解空气 41 pH 控制剂 K(n, g)42K 50 Cr(n, g)51Cr 腐蚀产物 54 Cr(n, g)55Cr 腐蚀产物 55 Mn(n, g)56Mn 腐蚀产物 54 Fe(n, g)55Fe 腐蚀产物 58 Fe(n, g)59Fe 腐蚀产物 59 Co(n, g)60mCo 腐蚀产物 59 Co(n, g)60Co 腐蚀产物 58 Ni(n, g)59Ni 腐蚀产物 62 Ni(n, g)63Ni 腐蚀产物 64 Ni(n, g)65Ni 腐蚀产物 94 腐蚀产物 Zr(n, g)95Zr 96 腐蚀产物 Zr(n, g)97Zr H(n, g)3H 6 Li(n, a)3H 10 B(n, a)7Li 14 N(n, p)14C 18 O(n, p)18F 16 O(n, p)16N
压水堆核电站蒸汽发生器水位控制浅析
压水堆核电站蒸汽发生器水位控制浅析核能将是我国21世纪的主要能源,压水堆核电站中蒸汽发生器的水位控制是主控室操纵员的核心工作。
本文重点分析主控室操纵员手动干预蒸汽发生器水位控制的方法。
标签:蒸汽发生器;手动干预;水位控制0 引言蒸汽发生器是压水堆核电站主控室操纵员在生产活动中重点关注的设备。
蒸汽发生器既是一回路的组成部分,又属于二回路组成部分[1]。
鉴于蒸汽发生器的重要性,主控室操纵员必须时刻关注蒸汽发生器的运行情况。
本文的分析主要针对M310核电机组立式U型管蒸汽发生器。
在蒸汽发生器运行过程中,如果水位过低,堆芯余热导出功能将恶化,会导致U型管顶部裸露,引起管束传热恶化,造成管板热冲击,甚至引起蒸汽进入给水环管,在给水管道中产生危险的汽锤现象;如果水位过高,会导致饱和蒸汽含水量过高,对汽轮机内设备产生冲蚀,影响设备使用寿命甚至损坏设备,同时水位过高会使得蒸汽发生器水装量增加,如果发生蒸汽管道破裂事故,会对堆芯产生过大的冷却而导致发生反应性事故,如果破口发生在安全壳内,产生的蒸汽将危害安全壳作为第三道屏障的安全性[2]。
1 水位自动控制系统1.1 蒸汽发生器水位测量蒸汽发生器通常由外壳、U型传热管、管板、隔板、管束围板、管束支撑板、旋叶式汽水分离器、蒸汽干燥器等部件组成,一回路冷却剂在U型管内流动,二回路水经倒J型管进入蒸汽发生器,与旋叶式汽水分离器分离出的饱和水混合,经U型管传热区的管束围板与蒸汽发生器筒体所形成的环形下降通道向下流动,然后在U型管传热区的上升通道中向上流动,同时吸收一回路冷却剂经U 型管传递的热量,过冷水吸收热量后变为饱和水和饱和蒸汽的混合物,经旋叶式汽水分离器和蒸汽干燥器分离后,饱和蒸汽进入汽轮机,饱和水与二回路给水混合后又沿环形下降通道开始自然循环,自然循环流动的驱动压头是二回路水在下降通道和上升通道中因密度差而产生的压差,驱动压头同时能够克服蒸汽发生器内汽水混合物在流道中摩擦阻力[3]。
压水堆核电厂一回路系统与设备简介补充讲义

从而既可避免放射性流体不可控地释放到海水中而污染环境,又可防止海水对核岛各热交换器的腐蚀 。
堆芯形状 圆柱形 方形
堆芯布置 立式 卧式
冷却剂流道 管束 排管型 多孔介质
燃料组件 排列形式:正方形、三角形、蜂窝型 数量:15x15、8x8、17x17等
堆芯
作用 核裂变链式反应的区域
堆芯特征
典型压水反应堆本体结构
反应堆本体
堆芯(活性区)
堆内构件
反应堆压力容器(压力壳)
控制棒驱动机构
压水堆堆芯
反应堆冷却剂系统即主系统,是核电厂最重要最基本的系统。
核裂变能量的导出、交换和转化在该系统内发生,该系统功能的正常发挥,具有重大的经济意义; 该系统基本部分均要承受高压,构成了所谓“压力边界”,是核电厂的三道“安全屏障”之一,维护了核电厂的安全,避免放射性物质向环境的释放。
(1)反应堆冷却剂系统
若水位过低,蒸汽发生器二次侧水量过少,会引起一回路冷却不充分,管束因温度升高有可能破裂;同时,在给水管道中有产生汽锤的危险,蒸汽发生器的管板还将受到热冲击;
反应堆主冷却剂泵(主泵)是反应堆的“心脏”。
在主系统充水时,利用主泵赶气;
在开堆前,利用主泵循环升温,达到开堆280C条件;
在反应堆正常运行时,冷却剂由反应堆流出经主管道流进蒸发器,把热量传给二回路侧给水,然后再由主泵送回反应堆进行循环。
B
在安全注入的情况下,化容系统上充泵作为高压安注泵运行。此时,安注运行方式自动取代所有其他运行方式。
C
化容系统安全功能
化容系统简图
下泄回路
上充回路
净化回路
轴封水、轴封回流回路
过剩下泄回路
低压下泄管线
除硼管线
核电站压水堆一回路水温的MCP
核电站压水堆一回路水温的MCP-PID控制摘要:压水堆型核电站的一回路水温控制可通过反应堆的控制棒插入深度来控制,通过MCP-PID控制器与Z-N法对系统的被控过程数学模型的参数整定和性能评测。
导出按调整时间计算的MCP-PID控制器整定公式。
实验结果证明:MCP-PID控制器与Z-N法相比较,具有鲁棒性强和调整时间短的特点。
关键词:核电站;压水堆一回路;多容惯性;参数整定;控制系统设计0 引言压水堆核电站用铀制成的核燃料在反应堆内进行裂变并释放出大量热能;高压下的循环冷却水把热能带出,在蒸汽发生器内生成蒸汽;高温高压的蒸汽推动汽轮机,进而推动发电机旋转。
在压水堆核电站一回路中,反应堆堆芯因核燃料裂变产生巨大的热能,由主泵泵入堆芯的水被加热成高温高压水,高温高压水流经蒸汽发生器内的传热U型管,通过管壁将热能传递给U型管外的二回路冷却水,释放热量后又被主泵送回堆芯重新加热再进入蒸汽发生器。
水这样不断地在密闭的回路内循环,被称为一回路。
压水堆核电站的一回路系统与二回路系统完全隔开,它是一个密闭的循环系统。
压水堆型核电站的一回路水流温度可通过反应堆控制棒的插入深度来控制。
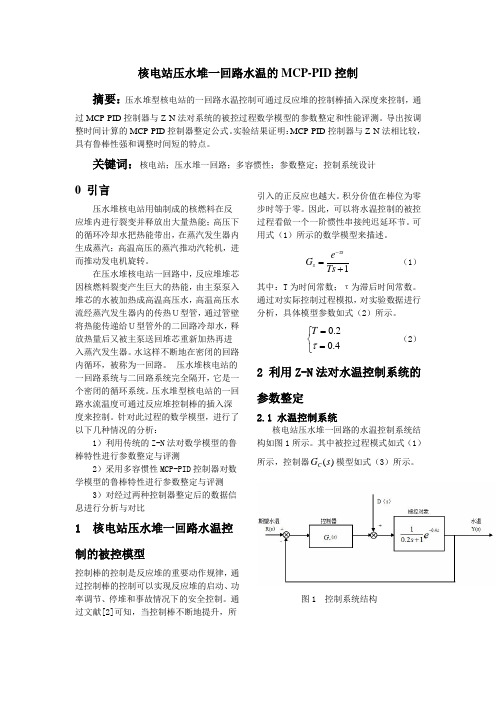
针对此过程的数学模型,进行了以下几种情况的分析:1)利用传统的Z-N法对数学模型的鲁棒特性进行参数整定与评测2)采用多容惯性MCP-PID控制器对数学模型的鲁棒特性进行参数整定与评测3)对经过两种控制器整定后的数据信息进行分析与对比1 核电站压水堆一回路水温控制的被控模型控制棒的控制是反应堆的重要动作规律,通过控制棒的控制可以实现反应堆的启动、功率调节、停堆和事故情况下的安全控制。
通过文献[2]可知,当控制棒不断地提升,所引入的正反应也越大。
积分价值在棒位为零步时等于零。
因此,可以将水温控制的被控过程看做一个一阶惯性串接纯迟延环节。
可用式(1)所示的数学模型来描述。
1+=-TseGssτ(1)其中:T为时间常数;τ为滞后时间常数。
通过对实际控制过程模拟,对实验数据进行分析,具体模型参数如式(2)所示。
典型压水堆核电厂一回路热力系统小破口失水事故计算分析
典型压水堆核电厂一回路热力系统小破口失水事故计算分析核工程与核技术专业学生指导老师[摘要]压水堆是使用轻水作冷却剂和慢化剂,在高温、高压条件下运行的核反应堆,它所使用的燃料为低浓度的浓缩铀。
在20世纪80年代,压水堆被认为是技术最成熟,最经济,最安全的堆型。
目前,我国内地大部分正在运行和在建机组为压水堆机组。
而压水堆核电站与普通火电站的最大区别就在于:它的一回路带有放射性。
当压水堆发生小破口失水事故后,可能导致反应堆冷却剂中的放射性物质进入安全壳,经安全壳泄露之后,会污染环境。
而通过研究典型压水堆核电厂一回路热力系统在小破口失水事故工况下的系统响应,能够让我们对压水堆核电厂的安全有更直观的认识,确保核电能够安全有效的为人类服务。
本论文是以典型压水堆核电厂为研究对象,用RELAP5软件为工具,对核电厂的一回路热力系统进行建模和仿真。
建模和仿真的范围是:反应堆冷却剂系统(RCP)、与安全分析有关的一回路辅助系统。
一回路辅助系统主要包括:辅助给水系统(ASG)、反应堆余热排出系统(RRA)、安全注入系统(RIS)和化学容积控制系统(RCV)。
在建模的过程中运用了模块化结构的方法,即:先将一回路的热力系统模型分解为若干个功能独立,能够分别调试、设计以及验证的模块,然后再逐层耦合组成分系统模型,最后整合成完整的一回路热力系统模型。
根据所建一回路热力系统模型进行稳态计算,并将计算结果与典型压水堆核电厂的数据进行对比分析。
在此基础上,对冷管段的小破口失水事故的极限工况瞬态过程进行了模拟和分析,通过仿真实验,了解事故发生过程中反应堆堆芯的热工水力状况。
[关键词] 压水堆,RELAP5,一回路热力系统,建模,小破口失水事故The analysis and calculation of typical nuclear power plant thermodynamic system of PWR primary small locaNuclear Engineering and Nuclear TechnologyStudent:Adviser:[ABSTRACT]Pressurized water reactor is the use of light water as coolant and moderator, running in the condition of high temperature, high pressure reactor, the fuel is uranium of low concentration. In twentieth Century 80 time, pressurized water reactor is considered to be the most mature technology, the economy, the security of the reactor type. At present, the mainland of China and most are in operation and under construction units for pressurized water reactor. The pressurized water reactor nuclear power plant with the biggest difference between ordinary thermal power station is a loop: it's radioactive. When a small break loss of coolant accident for pressurized water reactor, the reactor coolant may lead to radioactive substances into the containment, after security shell leakage, pollution of the environment. The loss of coolant accident response by studying typical pressurized water reactor nuclear power plant thermodynamic system of a loop, so that we can have a more intuitive understanding of the pressurized water reactor nuclear power plant safety, ensure that nuclear power is safe and effective for the human services.This paper is based on the typical pressurized water reactor nuclear power plant as the research object, using RELAP5 software as a tool, the modeling and Simulation of a loop of nuclear power plant thermal system. Scope: Modeling and Simulation of the reactor coolant system (RCP), and safety analysis of auxiliary system related. Auxiliary system mainly includes: auxiliary feedwater system (ASG), the reactor residual heat removal system (RRA), safety injection system (RIS) and the chemical and volume control system (RCV). In the modeling process using the method of modularization structure, namely: first the thermodynamic system model of a circuit is divided into several independent function, can be respectively debugging, design and verification module, and then layer by layer coupling component system model, finally integrated into a complete loop model of thermodynamic system.According to the calculation of the loop thermodynamic system model for steady state, and compare the results with a typical pressurized water reactor nuclear power plant by the comparative analysis of the data. On this basis, the simulation and analysis of transient process of small break loss of coolant accident of cooling pipe, through the simulation experiments, to understand the thermal hydraulic conditions in the process of the accident the reactor core.[Keywords] Pressurized-water reactor,RELAP5, The first loop thermal system,Modeling,Small break loss-of-coolant accident.目录1 绪论 (5)1.1研究的背景和意义 (5)1.2国内外研究现状 (6)1.3论文的工作 (6)2 典型压水堆核电厂一回路热力系统概述 (7)2.1冷却剂系统(RCP)概述 (7)2.2冷却剂系统(RCP)的主要设备 (8)2.2.1 反应堆压力容器 (8)2.2.2 蒸汽发生器 (9)2.2.3 冷却剂泵 (10)2.2.4 稳压器 (11)2.3一回路辅助系统 (12)2.3.1 化学与容积控制系统(RCV) (12)2.3.2 硼和水补给系统(REA) (13)2.3.3 余热排出系统(RRA) (13)3 典型压水堆核电厂一回路热力系统建模 (14)3.1热力系统的建模方法 (14)3.2反应堆冷却剂系统的建模 (15)3.2.1反应堆压力容器 (15)3.2.2稳压器 (17)3.2.3蒸汽发生器 (18)4 核电厂小破口失水事故安全分析 (20)4.1小破口失水事故概述 (20)4.2小破口失水事故分析 (22)4.3结论 (25)5 全文总结 (25)参考文献 (25)致谢 (26)附录 (28)1绪论1.1研究的背景和意义随着中国经济的高速发展,社会对能源的需求也日益增加。
核电站水压堆一回路水温控制1

目录1课程设计选题简介 (1)1.1概述 (1)1.2设计流程 (1)1.3选择控制系统 (1)2 被控对象系统模型及性能分析 (2)3控制方案选择系统仿真及数据分析 (3)3.1 (3)3.2 (4)3.3 (4)课程设计总结 (5)参考文献 (5)核电站水压堆一回路水温控制 设计背景压水堆,字面上看就是采用高压水来冷却核燃料的一种反应堆,其工作原理为:主泵将120~160个大气压的一回路冷却水送入堆芯,把核燃料放出的热能带出堆芯,而后进入蒸汽发生器,通过传热管把热量传给二回路水,使其沸腾并产生蒸汽;一回路冷却水温度下降,进入堆芯,完成一回路水循环;二回路产生的高压蒸汽推动汽轮机发电,再经过冷凝器和预热器进入蒸汽发生器,完成二回路水循环。
中国建成和在建共有13台核电机组,除秦山三期采用CANDU 堆技术,山东荣成采用高温气冷堆,其余均为压水堆。
压水堆核电站的一回路的主要设备有蒸汽发生器,稳压器,主泵和一些辅助设备。
压水堆目前是核电站的一种主流堆型,全世界约60%的反应堆是压水堆,压水堆核电站一般分为两个回路:一回路系统和二回路系统,一回路系统称为核岛部分。
二回路系统主要是常规岛部分,具体有汽轮机部分和电机部分等。
一、课程设计题目及其要求核电站压水堆一回路水温控制 1、实际控制过程压水堆型核电站的一回路水流温度可通过反应堆控制棒的插入深度来控制,其控制系统如下图所示.在蒸汽发生器处,一回路水流的热量传递给二回路的工质,二回路的蒸汽流将推动汽轮机做功发电.一回路水流温度控制对象的模型可用一阶惯性串接纯延迟环节表示:G(s)=1+-Ts e s τ.假设,T=0.2s ;τ=0.4s 。
图1一回路水流温度控制系统2、控制设计要求试用反馈控制器Gc(s),使系统的超调量σ%≤10%。
二、被控对象系统模型及性能分析被控函数G(s)=12.04.0+-s e s⨯D(s),该开环传函为一阶惯性串接纯延迟环节。
自控课程实计 核电站压水堆一回路水温控制
自动控制原理实验课程实验报告题目:核电站压水堆一回路水温控制学号:班级:姓名:学院:自动化工程学院实践报告内容(目录)一、课程设计背景------------------------------1二、控制对象建模------------------------------2三、控制对象特性分析--------------------------3四、控制策略的确定与实现----------------------3五、实验分析----------------------------------7六、课程设计体会------------------------------7一. 课程设计背景:压水堆,字面上看就是采用高压水来冷却核燃料的一种反应堆,其工作原理为:主泵将120~160个大气压的一回路冷却水送入堆芯,把核燃料放出的热能带出堆芯,而后进入蒸汽发生器,通过传热管把热量传给二回路水,使其沸腾并产生蒸汽;一回路冷却水温度下降,进入堆芯,完成一回路水循环;二回路产生的高压蒸汽推动汽轮机发电,再经过冷凝器和预热器进入蒸汽发生器,完成二回路水循环。
中国建成和在建共有13台核电机组,除秦山三期采用CANDU堆技术,山东荣成采用高温气冷堆,其余均为压水堆.压水堆核电站的一回路的主要设备有蒸汽发生器,稳压器,主泵和一些辅助设备压水堆目前是核电站的一种主流堆型,全世界约60%的反应堆是压水堆,压水堆核电站一般分为两个回路:一回路系统和二回路系统,一回路系统称为核岛部分。
二回路系统主要是常规岛部分,具体有汽轮机部分和电机部分等。
图1是压水堆核电站的大致的过程原理图。
图1核岛部分的关键设备是反应堆,反应堆是由压力容器,堆芯,堆型构件和控制棒驱动机构组成。
反应堆的高度大致在6m左右,直径在3m左右。
问题描述:核电站压水堆一回路水温控制1.实际控制过程压水堆型核电站的一回路水流温度可通过反应堆控制棒的插入深度来控制,其控制系统如下图所示.在蒸汽发生处,一回路水流的热量传递给二回路的工质,二回路的蒸汽流将推动汽轮机做功发电.一回路水流温度控制对象的模型可用一阶惯性串接纯延迟环节表示:()1Tse ss +=-τG假设,T=0.2s;τ=0.4s2.控制设计要求试设计控制器()sGc,使系统的超调量10%%p≤σ.二. 控制对象建模:在Simulink中搭建系统控制模型,如图2所示.在进行仿真实验时,控制器部分随具体控制器而变.选用实际PID控制器:图2三. 控制对象特性分析:被控对象为:()10.2sess4.+=-G;该开环传函为一阶惯性串接纯延迟环节;(1) 其中放大系数K=1;时间常数T=0.2;延迟系数τ=0.4;(2) 在MATLAB中绘制开环Nyquist图,并利用Nyquist判据来判断系统的稳定性;在MATLAB的命令窗中键入:”n=[1];d=[0.2 1];tao=0.4;g0=tf(n,d,'inputdelay',tao);nyquist(g0)”得到Nyquist图形如图3:图3系统开环Nyquist图没有逆时针包围(-1,j0)点(红色十字标识),又因为系统开环无又根,所以闭环系统稳定.四.控制策略的确定与实现:采用PID控制器进行温度控制PID控制器(Proportion Integration Differentiation.比例-积分-微分控制器),由比例单元 P、积分单元I 和微分单元 D 组成。
材料与水化学第讲核电厂一回路水化学

式中 z 为荷电粒子电荷数;Z为物质的原子序数。 可以看出,荷电粒子电荷越多,速度越慢,LET值越大。如20MeV的a粒子在
水中LET值为3.3eV/Å,而5MeV的a粒子在水中的LET值为9.5eV/Å,对同样能量 的氚荷而言,其相应的值分别为0.48eV/Å和1.42eV/Å。它们都比电子的LET大得 多,所以重荷电粒子的穿透能力比起同样能量的电子要小得多。
辐射化学的时间量级
Most of the chemical reactions are finished. However in certain systems reaction can continue for several days. 几乎所有反应结束
Radiative decay of triplet states. 三重态放射性衰变
El=12400;
E = hf 。
0 1n6 3Li 3 1H +2 4H e
0 1n14 18 3C d 14 18 4C d+γ
各种粒子的核特性
The nuclear properties of particles
射线种类
a射线 b射线 g射线 质子(P) 中子(n) 氘(d) 氚(T) 裂变碎片(轻) 裂变碎片(重)
反应物在冷却剂 中的存在
天 然 2H pH 控 制 剂 可溶性中子吸收剂 溶 解 空 气 ,联 氨 分 解 物 溶解空气或腐蚀产物 溶解空气或腐蚀产物 杂质 溶解空气 溶解空气 pH 控 制 剂 腐蚀产物 腐蚀产物 腐蚀产物 腐蚀产物 腐蚀产物 腐蚀产物 腐蚀产物 腐蚀产物 腐蚀产物 腐蚀产物 腐蚀产物 腐蚀产物
压水堆核电厂一回路水化学控制
龙源期刊网
压水堆核电厂一回路水化学控制
作者:王凤军刘红英彭彦龙
来源:《硅谷》2011年第02期
摘要:压水堆核电厂一回路水化学控制措施:控制一回路冷却剂硼浓度以调节反应堆堆芯的反应性;控制一回路冷却剂中氢浓度以抑制水的辐照分解,从而控制冷却剂中溶解氧的浓度;通过硼酸和氢氧化锂的调节,控制一回路反应堆冷却剂的pH值;通过化学和容积控制系统的过滤、离子交换和除气,减少一回路冷却剂中的杂质浓度。
关键词:一回路;水化学;控制
中图分类号:TK
文献标识码:A。
论核电厂反应堆的温度控制与保护

论核电厂反应堆的温度控制与保护作者:王伟华来源:《智富时代》2018年第10期【摘要】党中央和国务院在新的核电规划中,明确表示将由“适度发展核电”向“积极发展核电”迈进,根据专家的预测和有关部门的规划,到2020年,核电装机容量要达到总装机容量的4%,核电投运规模达到4000万千瓦,以下对核电厂反应堆的温度与保护进行了讲解与论述,通过对反应堆中温度参数的分析,来研究反应堆一回路和二回路中各个系统参数的变化与影响。
【关键词】反应堆;温度;控制;保护一、反应堆温度控制的概念核电厂反应堆的温度控制主要是指一回路平均温度的控制,以大亚湾核电站为例,共有两个环路,在每个环路的热段和冷段,各引出一个温度值,这2个温度的平均值即是一回路平均温度,而这2个温度的差值被称为温差,这也是一个很重要的参数,因为它反映的是一回路的功率输出水平。
影响一回路平均温度的因素主要来自两个方面,一方面来自反应堆,堆功率的变化导致温度上升或者下降,由于温度反馈的作用,温度和功率都不会无限制的变化,最后在反应性平衡后功率和温度都稳定在一个值上。
影响温度变化的另一个因素来自于二回路,即负荷的变化带来温度的变化,温度变化引起反应堆功率的变化,当二回路功率突然增加时,例如一回路平均温度急剧降低,将会导致核功率急剧上升,最后一回路平均温度可能会稳定在一个较低的值上,但是由于核功率的急剧上升,堆芯内某些部位的温度可能已经上升到超过设计要求的限值。
另外一种选择即为平均温度保持不变,这是一种对一回路比较有利的控制方法,假设保持一回路平均温度在整个负荷区间范围内保持310度不变,这样则意味着在0%负荷时,二回路的蒸汽压力将达到9.86MPa,而100%负荷是蒸汽压力将只有6.7MPa,很少有汽机能承受如此大的压力变化,而将平均温度的定值下移则又面临蒸汽品质的问题,为了克服上面两种控制方案的缺点,大部分核电厂都采用漂移一回路平均温度的折衷方案,即:随着机组功率的上升,一回路平均温度逐渐增加,同时蒸汽发生器的出口压力和温度逐渐下降。
(整理)【核电站】一回路主要辅助系统:化学和容积控制系统(RCV)

1.2 一回路主要辅助系统1.2.1 化学和容积控制系统(RCV)一、概述化学和容积控制系统(RCV)是反应堆冷却剂系统(RCP)的一个主要的辅助系统。
它在反应堆的启动、停运及正常运行过程中都起着十分重要的作用,它保证了反应堆的冷却剂的水容积,化学特性的稳定和控制反应性的变化。
二、系统功能:主要功能:a)容积控制:通过上充和下泄功能维持稳压器水位,保持一回路水容积;b)反应性控制:与反应堆硼和水的补给系统(REA)相配合,调节冷却剂硼浓度以跟踪反应堆的缓慢的反应性变化;c)化学控制:控制反应堆冷却剂的PH值,氧含量和其他容积气体含量,防止腐蚀,裂变气体积聚和爆炸,降低冷却剂放射性水平,净化冷却剂。
辅助功能:(1)为主泵轴封提供经过过滤及冷却的水(2)为稳压器提供辅助喷淋水(3)一回路冷却剂过剩下泄(4)需要时,上充泵可作为高压安注泵运行三、系统功能描述:1. 容积控制所谓容积控制就是通过RCV吸收稳压器不能全部吸收的那部分一回路水容积的变化的量,维持稳压器水位在一个整定的范围内。
一回路水容积变化的原因主要是温度的改变,如图(1)所示:从图可见当反应堆冷却剂系统RCP从冷态(60℃)增温到热态(291℃)时,其比容增加将近40%;正常运行时,冷却剂的平均温度随功率的变化而变化,从而比容也随之改变,也造成一回路中水的体积的改变。
另外,由于冷却剂系统处于155Bar的高压下,也会不可避免地发生泄漏,需系)上充泵图(2)容积控制原理2. 化学控制由于冷却剂在一回路内循环流动,其水化学特性会整个回路都相同:即由于水的温度增高,水中含氧量增加,及一回路水PH值降低,都将导致一回路部件的腐蚀,而冷却剂通过堆芯时,由于中子的辐照,水中的腐蚀产物被活化,并且,也有可能带出元件包壳破裂处逸出的裂变产物。
因此,为了把一回路所有部件的腐蚀限制在最低程度,避免杂质沉积在燃料元件表面而导致包壳因传热恶化而破裂,以及限制一回路水中腐蚀产物成为辐射源,就需要通过化学控制,维持一回路水的化学性质在规定的限值内。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
目录
1课程设计选题简介 (1)
1.1概述 (1)
1.2设计流程 (1)
1.3选择控制系统 (1)
2 被控对象系统模型及性能分析 (2)
3控制方案选择系统仿真及数据分析 (3)
3.1 (3)
3.2 (4)
3.3 (4)
课程设计总结 (5)
参考文献 (5)
核电站水压堆一回路水温控制 设计背景
压水堆,字面上看就是采用高压水来冷却核燃料的一种反应堆,其工作原理
为:主泵将120~160个大气压的一回路冷却水送入堆芯,把核燃料放出的热能带出堆芯,而后进入蒸汽发生器,通过传热管把热量传给二回路水,使其沸腾并产生蒸汽;一回路冷却水温度下降,进入堆芯,完成一回路水循环;二回路产生的高压蒸汽推动汽轮机发电,再经过冷凝器和预热器进入蒸汽发生器,完成二回路水循环。
中国建成和在建共有13台核电机组,除秦山三期采用CANDU 堆技术,山东荣成采用高温气冷堆,其余均为压水堆。
压水堆核电站的一回路的主要设备有蒸汽发生器,稳压器,主泵和一些辅助设备。
压水堆目前是核电站的一种主流堆型,全世界约60%的反应堆是压水堆,压水堆核电站一般分为两个回路:一回路系统和二回路系统,一回路系统称为核岛部分。
二回路系统主要是常规岛部分,具体有汽轮机部分和电机部分等。
一、课程设计题目及其要求
核电站压水堆一回路水温控制 1、实际控制过程
压水堆型核电站的一回路水流温度可通过反应堆控制棒的插入深度来控制,其控制系统如下图所示.在蒸汽发生器处,一回路水流的热量传递给二回路的工质,二回路的蒸汽流将推动汽轮机做功发电.一回路水流温度控制对象的模型可用一
阶惯性串接纯延迟环节表示:G(s)=1
+-Ts e s τ.假设,T=0.2s ;τ=0.4s 。
图1一回路水流温度控制系统
2、控制设计要求
试用反馈控制器Gc(s),使系统的超调量σ%≤10%。
二、被控对象系统模型及性能分析
被控函数G(s)=1
2.04.0+-s e s
⨯D(s),该开环传函为一阶惯性串接纯延迟环节。
σ%=2
1ζξπ--
e
⇒ς≥0.6,假设系统调整时间t s =1s
t s =
n
ξω3
(Δ=0.05)or
n
ζω4
(Δ=0.02)⇒n ω=5.8
性能分析:控制约束条件ξ≥0.6,系统时域阻尼比性能指标稳定的,调整时间快速性控制在t s =1s<4s ,超调量σ%%5.9≤准确。
三、控制方案选择和系统仿真
方案一:PID 控制
PID 控制能加快系统响应速度具体作法如下:
①使积分环节和微分环节的不工作,调整比例增益Kp :从一个小数值开始,主
次增大,直到使率减振荡响应的衰减比为4:1;记录此时的比例系数K 1,振荡周期T k 。
②计算此时的比例带δk ,δk =1/k 1。
③再根据表计算出积分时间和微分时间。
(1)绘制受控对象的阶跃响应曲线
图2原系统响应曲线
曲线稳态性差,使用PID 控制优化
(2)根据K=1,T=0.2s, =0.4s,通过命令
k=1;T=0.2;tao=0.4;
Kp1=T/(k*tao)
Kp2=(0.9*T)/(k*tao)
Ti2=3*tao
Kp3=(1.2*T)/(k*tao)
Ti3=2*tao
Td3=0.5*tao
执行指令,整理计算结果可得到各控制参数:
Kp1 =0.5000
Kp2 =0.4500,Ti2 =1.2000
Kp3 =0.6000,Ti3 =0.8000,Td3 = 0.2000
(3)在Simulink中搭建系统控制模型图3,在进行仿真实验时,控制器部分随具体控制器而变。
选用实际PID控制器,PID控制器可以根据历史数据和差别的出现率来调整输入值,这样可以使系统更加准确,更加稳定。
图3系统simulink图
(4)使积分环节和微分环节的不工作,调整比例增益Kp:从一个小数值开始,主次增大,直到使率减振荡响应的衰减比为4:1;记录此时的比例系数K1,振荡
=1.176。
周期Tk,大约在K=0.883时,出现4:1,获得响应曲线图4,T
k
012345678910
图4
(5)测取相关数据有:δ=1/0.883,;T k=1.176
P控制系数:Kp=1.13;
PI控制系数:Kp=1.36;T
i
=0.588;
PID控制系数:Kp=0.906;T
i =0.3528;T
d
=0.1176。
可以将PID控制系数加入仿真获得PID控制效果图
图5 PID效果图
(6)经计算超调量43
.0
%=
σ>10%;不满足σ%≤10%。
经过调整后,改变PID参数Kp=0.587,T
i =0.353,T
d=
0.043
获得校正响应曲线图
0123456789
10
图6
通过以上PID 设计校正,可以得出σ%=5.4%<10%,成立满足设计要求。
方案二:根轨迹分析与设计
(1)由于根据设计要求σ%≤10%,执行以下指令 sigma=0.1;
zeta=(((log(1/sigma))^2)/((pi)^2+(log(1/sigma))^2))^0.5 可获得ς≥0.6,可取ς=0.65,假设t s =1s,⇒ωn =5.8。
运行计算期望主导极点2,1s =-ςωn ±j ωn 21ς-=-3.77±4.4j (2)绘制原来系统根轨迹
Root Locus
Real Axis
I m a g i n a r y A x i s
图7原根轨迹
(3)由上面的曲线根轨迹图看出根轨迹通过期望主导极点,则判断已满足设计要求,可以确定K 的取值为K=0.2,串联校正装置G c =K=0.2。
四、课程设计总结
本实验要求对核电站压水堆一回路水温进行实际控制,一回路水流温度一回路水流温度控制对象的模型为一阶惯性串接纯延迟环节.要求设计控制器Gc(s),使系统的超调量小于10%.
A 、根轨迹法,在以上设计的两个方案中,明显根轨迹法反映速度快,稳定时间短,但还可以对系统控制器进行优化。
根轨迹期望极点开始时不能达到,并且根轨迹趋近于期望极点,可以知道为了满足要求,我通过调整时间t s 的改变,从而调整了期望极点,使得原来系统符合要求,并且根据设计性能要求进行时域分析,可从根轨迹图上分析出控制系统的动态和稳态特性,都是比较稳定的曲线;
B 、PID 控制器。
为了满足超调量的要求,需要对PID 控制器的各项参数反复调整.其中Kp 为比例增益,T i 积分时间,T d 微分时间.在调整的过程中可以看到,Kp 一般将加快系统的响应,但是过大的比例系数会使系统有比较大的超调量,并产生振荡,使稳定性变坏。
如果在比例调节的基础上系统不能满足设计要求,则必须加入积分环节。
增大积分时间T i 有利于减小超调量,减小振荡,使系统的稳定性
增加,但是系统静态误差消除时间变长。
如果系统反复调整还不能得到满意的结果,则可以加入微分环节。
增大微分时间T
有利于加快系统的响应速度,使系
d
统超调量减小,稳定性增加,但系统对扰动的抑制能力减弱。
各种参数合理配置,能让在动态性能指标要求折中之后更倾向于我们所期待的最理想的结果。
在PID参数进行整定时,如果能够有理论的方法确定PID参数当然是最理想的方法,但是在实际的应用中,更多的是通过凑试法来确定PID的参数。
五、课程设计感想
通过课程设计,让我加深了课外自动控制的应用学习,实践中可以知道需要利用时域分析、根轨迹分析和其他设计分析,PID可以让装置优化达到理想化,使得整个过程变得很好,而根轨迹则能达到响应时间快,但感觉PID操作快捷,虽然课程设计的要求少,但达到要求经历了许多调试和反复校验,过程很繁琐,但是很感谢老师的亲切指导,我才能完成好这次设计。
参考文献
[1]自动控制原理——理论篇杨平、翁思义、郭平中国电力出版社
[2]自动控制原理——实验与实践篇杨平、余洁、徐春梅、徐晓丽中国电力出版社
[3]自动控制原理学习辅导杨平、翁思义、王志萍中国电力出版社
[4]发电厂动力部分关金峰中国电力出版社
[5]MATLAB在控制系统中的应用张静等电子工业出版社
[6]线性控制系统理论与方法李俊民、李靖、杜彩霞西安电子科技大学出版社
[7]自动控制系统廖晓钟、刘向东北京理工大学出版社。