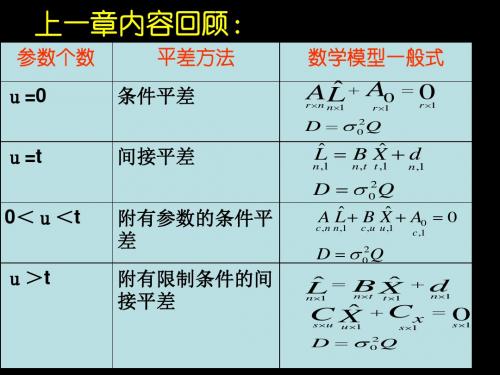
第三章 条件平差..
第三章 条件平差

AP 1 AT K W 0
此式称为联系数法方程(简称法方程)。
条件平差原理
取法方程的系数阵 AP-1AT = N,由上式易知N阵关 于主对角线对称,得法方程表达式
NK W 0
法方程数阵N的秩 即N是一个r阶的满秩方阵,且可逆。移项得
NK W
R( N ) R( AP 1 AT ) r
1 2 4
相对应的改正数条件方程式形式
v1 v 2 v 4 w1 0 v 2 v3 v5 w2 0 v 4 v6 v7 w3 0 v5 v7 v8 w4 0 v 2 v7 w5 0
其中
高程网条件方程的个数及条件方程式
ˆ LL
T
取全微分式的系数阵为
f f 1 , f 2 , , f n T
由协因数传播律得
Q FF f T Q LL f ˆˆ
f f , L ˆ ˆ ˆ 1 L L L2
f , , L ˆ ˆ L L n
上式可分别表达成矩阵形式如下
ˆ AL A0 0
AV W 0
W ( AL A0 )
条件平差原理
按求函数极值的拉格朗日乘数法,引入乘系数 K [k k k ] (联系数向量),构成函数:
T r ,1 a b r
V T PV 2 K T ( AV W )
为引入最小二乘法,将Φ 对V求一阶导数,并令其 为零 ( K T AV ) d (V T PV ) T T
QAT N E QAT 0
QAT N 1 QAT N 1 AQ Q QAT N 1 AQ E AQ 0 1 1 N N AQ 0 QAT N 1 QAT N 1 AQ 0 T 1 0 0 Q QA N AQ
条件平差原理

§9.1 条件平差原理在条件观测平差中,以n 个观测值的平差值1ˆ⨯n L 作为未知数,列出v 个未知数的条件式,在min =PV V T 情况下,用条件极值的方法求出一组v 值,进而求出平差值。
9.1.1基础方程和它的解设某平差问题,有n 个带有相互独立的正态随机误差的观测值 ,其相应的权阵为 , 它是对角阵,改正数为 ,平差值为 。
当有r 个多余观测时,则平差值 应满足r 个平差值条件方程为:⎪⎪⎭⎪⎪⎬⎫=++++=++++=++++0ˆˆˆ0ˆˆˆ0ˆˆˆ221122112211οοοr L r L r L r b L b L b L b a L a L a L a n n n n n n (9-1) 式中i a 、i b 、…i r (i =1、2、…n )——为条件方程的系数;0a 、0b 、…0r ——为条件方程的常项数以ii i v L L +=ˆ(i =1、2、…n )代入(9-1)得条件方程(9-2)式中a w 、b w 、……r w 为条件方程的闭合差,或称为条件方程的不符值,即(9-3) 令⎪⎪⎪⎪⎪⎭⎫⎝⎛=⨯n n n n r r r r b b b a a a A212121⎪⎪⎭⎪⎪⎬⎫++⋅⋅⋅++=++⋅⋅⋅++=++++=022110221102211r L r L r L r w b L b L b L b w a L a L a L a w n n n n n b n n a ⎪⎪⎭⎪⎪⎬⎫=++⋅⋅⋅++=++⋅⋅⋅++=++⋅⋅⋅++000221122112211r n n b n n a n n w v r v r v r w v b v b v b w v a v a v a ⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯n n L L L L 211⎪⎪⎪⎪⎪⎭⎫ ⎝⎛=⨯n n L L L L ˆˆˆˆ2111⨯n L nn P ⨯1⨯n V 1ˆ⨯n L 1ˆ⨯n L则(9-1)及(9-2)上两式的矩阵表达式为0ˆ0=+A LA (9-4) 0=+W AV (9-5)上改正数条件方程式中V 的解不是唯一的解,根据最小二乘原理,在V 的无穷多组解中,取PV V T = 最小的一组解是唯一的,V 的这一组解,可用拉格朗日乘数法解出。
条件平差与间接平差的相互关系
条件平差与间接平差的相互关系
一、条件平差与间接平差
1、条件平差与间接平差是指:条件平差是指基础数据是现有被观
测坐标信息,假定各点位置坐标值满足一定近似关系时(即解算中假
定有约束关系或条件,以达到所求结果的平差方法);而间接平差是指,基础数据是待测点的被观测量,包括方位量、距离量等,无任何
关系的前提条件,是一种完全无条件的平差方法。
二、条件平差
2、条件平差一般会把条件设置为两个系统中坐标值的差值最小,
这样就能够更容易地实现平差。
条件平差的典型应用是重叠法平差,
它会利用各观测值之间的内在联系,并通过设定一定的几何条件,使
其之间被观测量满足某一关系,以解决无条件方程组的平差问题。
三、间接平差
3、间接平差是指以被观测量构成的方程组,可以以各种迭代方法
求解,但是必须有一定的条件限制才能使解出的坐标值符合实际要求。
加拿大匹兹堡大学的Bloch教授认为,从下面几个原因考虑起,最好
用间接平差来解决坐标转换的问题:
(1)传统的解算序号很容易引起原点偏移和比例错误;
(2)间接平差可以很好地表示待解系统中的不确定性;
(3)使用间接平差可以很好地降低待解系统中分量精度和消隐关
系统时发生的偏差。
四、条件平差与间接平差的关系
4、条件平差与间接平差是有联系的,相互之间的联系是:可以把
条件平差看做是一种特殊的间接平差,即在无条件间接平差的基础上,再加入解算中的限制条件,以达到所求结果。
可以说,条件平差是间
接平差的分支,而间接平差是条件平差的总集合。
条件平差的基本原理

v1
V
n ,1
v2
vn
wa F1L1, L2 ,, Ln
wb F2 L1, L2 ,, Ln
wr Fr L1, L2 ,, Ln
则相应方程的矩阵表达式分别为
F Lˆ 0
AV W 0 W FL
3. 基础方程
按求函数极值的拉格朗日乘数法,设乘数
5)求观测值的平差值; Lˆ L V
6)检核。 F (Lˆ) 0
7)检核。
3. 实例分析 例6-1水准网如右图:观测值及其权矩阵如下:
L 0.023 1.114 1.142 0.078 0.099 1.216 T m
P diag1 1 1 2.5 2.5 2.5
求各水准路线的最或然值。
解: 1)列出条件方程
或
v1 v2 v3 v2
0 0 v4 4 0
v1
1 0
1 1
1 0
0 1
v2 vv43
0 4
0 0
令c=1,则由定权公式
,有 pi
C Si
1 Si
P 1
1 p1
0
0
0
0
1 p2
0
0
0
0
1 p3
0
0 s1 0 0 0 2 0 0 0
0 0
0 0
1 p4
0
K
r ,1
ka
kb
kr T
,称为联系数向量。组成函数
V T PV 2K T AV W
将 φ 对V 求一阶导数,并令其为零,得
d dV
2V T P
2KT
A
0
两边转置,得
三角网条件平差计算
§3-4 三角网条件平差计算2学时三角网测量的目的,是通过观测三角形的各角度或边长,计算三角网中各未知点的坐标、边的长度及方位角等。
三角网按条件平差计算时,首要的问题是列出条件方程。
因此了解三角网的构成,总结其条件方程的种类及各种条件方程的组成规律是十分重要的。
三角网的种类比较多,网的布设形式也比较复杂。
根据观测内容的不同,有测角网、测边网、边角同测网等;根据网中起始数据的多少,有自由三角网和非自由三角网。
自由三角网是指仅具有必要起算数据的三角网,网中没有多余的已知数据。
如果测角三角网中,只有两个已知点(或者已知一个已知点的坐标、一条已知边的长度和一个已知的方位角),根据数学理论,以这两个已知点为起算数据,再结合必要的角度测量值,就能够解算出网中所有未知点的坐标。
如果三角网中除了必要的起算数据外还有其它的已知数据,或者说已知数据有冗余,就会增加对网形的约束,从而增强其可靠性,这种三角网称之为非自由三角网。
无论多么复杂的三角网,都是由单三角形、大地四边形和中点多边形组合而成的。
在本节,我们先讨论三角网条件平差中条件方程个数的确定问题,然后主要讨论测角三角网的条件方程的形式问题。
一、网中条件方程的个数三角网平差的目的,是要确定三角点在平面坐标系中的坐标最或然值。
如图3-9所示,根据前面学到的测量基础知识,我们知道,必须事先知道三角网中的四个数据,如两个三角点的4个坐标值,或者一个三角点的2个坐标值、一条边的长度和一个方位角,这4个已知数据我们称之为三角网的必要起算数据。
有了必要起算数据,就可以确定三角网在平面坐标系中的位置、网的大小及其方位,就可以计算三角网中未知点的坐标。
要对三角网进行平差计算,还必须先知道网中的总观测数n、判定必要观测数t,从而确定了多余观测数:r = n - t由条件平差原理知,多余观测数与条件方程数是相等的,有了多余观测数,也就确定出了条件方程的个数。
因此,问题的关键是判定必要观测数t。
第3讲(三角网条件平差
第三章 条件平差
第四节
二、条件方程的列立 条件方程的种类:图形条件(内角和条件)、水平条件(圆周条件)、极条件、 条件方程的种类:图形条件(内角和条件)、水平条件(圆周条件)、极条件、 )、水平条件 )、极条件 方位角条件、边长条件、坐标条件。 方位角条件、边长条件、坐标条件。 1. 图形条件(n=15 图形条件(n=15 t=8 r=7 哪7个?) 每个三角形内角平差值和等于180 每个三角形内角平差值和等于180
sin L1 sin L4 sin L7 sin L10 sin L13 sin L1 sin L4 sin L7 sin L10 sin L13 v v cot L1 1 − cot L2 2 sin L2 sin L5 sin L8 sin L11 sin L14 ρ ′′ sin L2 sin L5 sin L8 sin L11 sin L14 ρ ′′
第三章 条件平差
第四节
三角网平差的目的 求待定点平面坐标平差值, 求待定点平面坐标平差值,并进行精度 评定。 评定。 三角网件方程个数等于多余观测个数。 条件方程个数等于多余观测个数。
r=nr=n-t
测角网、测边网、边角同测网。无 关键在于确定必要观测个数 t 。 测角网、测边网、边角同测网。 论网型多么复杂, 论网型多么复杂,都是由三角形和 大地四边形相互邻接或重叠而组成。 当网中有2个或2 大地四边形相互邻接或重叠而组成。 1.当网中有2个或2个以上已知点时 t=2 t=2倍待定点数 当网中仅具备4个必要起算数据( 当网中仅具备4个必要起算数据(一点 坐标、一条边的方位、 坐标、一条边的方位、一条边的边 2.当网中少于2个已知点时 当网中少于2 长或已知两点坐标) 称为自由 长或已知两点坐标)时,称为自由 这四个数据成为必要起算数据。 网。这四个数据成为必要起算数据。 (1)测角网 t=2倍总点数t=2倍总点数-4 多余四个必要起算数据时,成为非自由 多余四个必要起算数据时,成为非自由 网。 (2)测边或边角网 t=2倍总点数t=2倍总点数-3
3-2 高程网条件平差

§3-2 高程网条件平差0.5学时高程网包括水准网和三角高程网。
对高程网进行条件平差时,一般以已知高程点的高程值作为起算数据,以各测段的观测高差值作为独立观测值,写出其满足的条件关系式,按照条件平差的原理解算各高差值的改正数和平差值,然后再计算出各待求点的高程平差值,并进行精度评定。
一、高程网条件方程的个数及条件方程式进行条件平差时,首先要确定条件方程的个数。
从上节内容可知道,在一般情况下,条件方程式的个数与多余观测的个数r相符。
而要确定多余观测个数就必须先确定必要观测个数t。
高程测量(包括三角高程测量和水准测量)的主要目的是确定未知点的高程值。
如图3-2所示高程网中,有2个已知高程点A、B,3个未知高程点C、D、E和8个高差观测值。
从图中可以看出,要确定3个未知点的高程值,至少需要知道其中的3个高差观测值(如h1、h2、h3,或h6、h7、h8,或h2、h4、h5等多种选择),即必要观测个数t = 3。
图3-2 则多余观测个数r = n – t = 8 - 3 = 5,可以写出这5个条件方程式⎪⎪⎪⎭⎪⎪⎪⎬⎫=-++=+-=-+=+-=--0ˆˆ0ˆˆ ˆ0ˆˆˆ0 ˆˆˆ 0ˆˆˆ72875764532421B A H H h h h h h h h h h h h h h h相对应的改正数条件方程式形式⎪⎪⎪⎭⎪⎪⎪⎬⎫=-+=-+-=--+=-+-=--+00 0005724875376425321421w v v w v v v w v v v w v v v w v v v其中⎪⎪⎪⎭⎪⎪⎪⎬⎫-++-=+--=-+-=+--=---=)()()()()(7258754764353224211B A H H h h w h h h w h h h w h h h w h h h w这些条件方程式(或改正数条件方程式),大体上分为两类:其一是闭合路线情况,如条件方程式中前四个条件方程式,可称为闭合条件方程式;其二是附合路线情况,如条件方程式中第五个,反应的是从A 点出发后测得的B 点的高程值是否与B 点的已知高程值相等的问题,可称为附合条件方程式。
条件平差
得法方程: AQATK-W=0 T 1 T N AQA AP A 令 aa r .r r .nn.nn.r 则有: NaaK-W=0
法方程系数阵Naa是一个r阶的满秩方阵,且可逆
N11k1 N12k 2 N1r k r W1 0 N 21k1 N 22k 2 N 2 r k r W2 0 N r1k1 N r 2 k 2 N rn k r Wr 0
目标函数:f x min n1 x a h x min F a , x f 1k 约束条件: h x 0 k 1 n1 F a, x
0 a F a, x 0 x
L2
L4 L1 L3 L2
A
B
C
§6-2 条件方程
条件方程的个数等于多余观测数r。条件方程之间 不能线性相关,在一个平差问题中,条件方程的个 数是固定不变的.
一、r的确定: r=n-t 二、条件方程的列立: 原则:足数(r个),线性无关,形式简单,易 于列立
控制网常见几何模型
水准网 三角网(测角网) 三边网(测边网) GPS基线向量网 单一附合导线
由此可得联系数K的解:
r ,1
K ( AQA ) W
T
T 1
V QA K
条件平差的 最小二乘解:
n,1
ˆ L V L
三、条件平差计算步骤:
1.根据平差问题的具体情况,列出条件方程,条 件方程的个数等于多余观测数r。 2.组成法方程式,法方程的个数等于多余观测数r 3.解法方程,求出联系数K值。 4.将K代入改正数方程式,求出V值,并求出观测 值的平差值=L+V。 5.检验平差计算的正确性(可用平差值重新列出 平差值条件方程式,看其是否满足方程)。
第三章条件平差
独立三角网
自由三角网
自由测角网
附合三角网(测角)
• 例:
∆ቤተ መጻሕፍቲ ባይዱ
α ∆
当n=35、n=22、n=35+22时,其条件式个数各为多 少?有哪些类型?
图形条件(内角和条件):
B
b1
a2
c1 D c2 a1 b3 c3 a3 b2 C
A
圆周条件(水平条件):
b1
a2
c1 a1 a3 c3
c2 b2 b3
5.1.06、 5.1.07
上节内容回顾:
改正数条件式 观测值的协方差阵 法方程
AV W 0
D P Q
2 0 1 2 0
r n n n
Naa K W 0 N aa AQ AT
r r n r
改正数方程
V P A K QA K
T
1 T
wr
T
• 则条件方程可写成:
ˆA 0 AL 0
• 以及改正数条件式:
W AL A0
AV W 0
这样一来,对于一个平差问题,我们能够得到 其数学模型:
AV W 0 D P Q
2 0 1 2 0
下面要解决的问题是: 由上述的数学模型来求改正数V。
不难发现,不能求得V的唯一解!!! 解决不唯一解的办法就是附加一个约束条件---“最小二乘估计” 即满足:
极条件(边长条件):
b1 a2
c1
a1 b3 c3
c2 b2 a3
极条件(边长条件)就是指由不同路线推算得到 的同一边长的长度应相等。
三角网的基本图形 1) 单三角形 2)大地四边形
3)中点多边形。
条件平差

L 1 L 2 L 3 180 0
(3)根据条件方程系数、闭合差及观测值的权组成法方程
v 1 v 2 v 3 12 0
A 1 1 1
1 P 1
NK W 0
N A P1 3 1 3 3 Nhomakorabea1
A
T
3 1
1.条件平差原理
A
h3
v1 v 3 v 4 v 5
f
0
C
v1 v 2 v 3 g 0
2.水准网条件平差
课本第35页例【3-4】
必要观测数t=3 多余观测r=4
h5
A
h2
h1
P1
观测总数n=7
解: (1)确定条件方程的个数
r nt 73 4
P2
(2)列出条件方程
V P
1
A K
T
V 4
(6)计算平差值
4
4
T
L L 1 v 1 42 38 17 - 4 42 38 13 1 L 2 L 2 v 2 60 15 24 - 4 60 15 20 L 3 L 3 v 3 77 06 31 - 4 77 06 27
1.条件平差原理
4 条件平差精度评定
(1)单位权中误差的计算
0
pvv
r
V
T
PV r
1.条件平差原理
(2)平差值函数的中误差
平差值函数
f ( L1 , L 2 , , L n )
测量程序设计_条件平差和间接平差
程序代码如下:
disp(‘-------水准网间接平差示例-------------’) disp(‘已知高程’) Ha = 5.015 % 已知点高程,单位m Hb = 6.016 % 已知点高程,单位m
A h2 D h1
C h6 E h7 B h4
h5
h3
disp(‘观测高差,单位m’)
L = [1.359; 2.009; 0.363; 1.012; 0.657; -0.357] disp(‘系数矩阵B’)
则: PV AT K
V P A K QA K
T
1 T
4、法方程: 将条件方程 AV+W=0代入到改正数方程V=QATK 中,则得到:
AQAT K W 0
r1 r1 r1
记作: 由于
N aa K W 0
rr
R( Naa ) R( AQAT ) R( A) r
Naa为满秩方阵, K Naa1W ( AQAT )1 ( AL A0 )
if H(1,1)+H(2,1)-H(3,1)+HA-HB==0 && H(2,1)H(4,1)==0 disp(‘检核正确') else disp(‘检核错误') end disp(‘平差后的高程值') HC = HA + H(1,1) HD = HA + H(1,1) + H(4,1)
二、间接平差的基本原理
其中l=L-d.
ˆ 设误差Δ和参数X的估计值分别为V 和 X
则有
ˆ V AX l
X0 为了便于计算,通常给参数估计一个充分接近的近似值
ˆ ˆ X X0 x
则误差方程表示为
测量平差复习题汇总

《测量平差》复习题第一章:绪论1、什么是观测量的真值?任何观测量,客观上总存在一个能反映其真正大小的数值,这个数值称为观测量的真值。
2、什么是观测误差?观测量的真值与观测值的差称为观测误差。
3、什么是观测条件?仪器误差、观测者和外界环境的综合影响称为观测条件。
4、根据误差对观测结果的影响,观测误差可分为哪几类?根据误差对观测结果的影响,观测误差可分为系统误差和偶然误差两类。
5、在测量中产生误差是不可避免的,即误差存在于整个观测过程,称为误差公理。
6、观测条件与观测质量之间的关系是什么?观测条件好,观测质量就高,观测条件差,观测质量就低。
7、怎样消除或削弱系统误差的影响?一是在观测过程中采取一定的措施;二是在观测结果中加入改正数。
8、测量平差的任务是什么?⑴求观测值的最或是值(平差值);⑵评定观测值及平差值的精度。
第二章:误差理论与平差原则1、描述偶然误差分布常用的三种方法是什么?⑴列表法;⑵绘图法;⑶密度函数法。
2、偶然误差具有哪些统计特性?(1) 有界性:在一定的观测条件下,误差的绝对值不会超过一定的限值。
(2) 聚中性:绝对值较小的误差比绝对值较大的误差出现的概率要大。
(3) 对称性:绝对值相等的正负误差出现的概率相等。
(4) 抵偿性:偶然误差的数学期望或偶然误差的算术平均值的极限值为0。
3、由偶然误差特性引出的两个测量依据是什么?⑴制定测量限差的依据;⑵判断系统误差(粗差)的依据。
4、什么叫精度?精度指的是误差分布的密集或离散的程度。
5、观测量的精度指标有哪些?(1) 方差与中误差;(2) 极限误差;(3) 相对误差。
6、极限误差是怎样定义的?在一定条件下,偶然误差不会超过一个界值,这个界值就是极限误差。
通常取三倍中误差为极限误差。
当观测要求较严时,也可取两倍中误差为极限误差。
7、误差传播律是用来解决什么问题的? 误差传播律是用来求观测值函数的中误差。
8、应用误差传播律的实际步骤是什么? (1) 根据具体测量问题,分析写出函数表达式),,,(21n x x x f z =;(2) 根据函数表达式写出真误差关系式n nx x f x x f x x f z ∆∂∂++∆∂∂+∆∂∂=∆ 2211; (3) 将真误差关系式转换成中误差关系式。
第三章 条件平差

xˆn1 xC 0 yˆ n1 yC 0
单一附合导线条件平差
1.方位角附合条件式
Tˆn1 T0 [ˆi ]1n1 (n 1) 180 T0 [i vi ]1n1 (n 1) 180
则方位角附合条件式可写为
v2
Lˆ n
Ln
vn
在这n个观测值中,有t个必要观测数,多余观测
数为r。
条件平差原理
可以列出r个平差值线性条件方程
a1v1 a2v2 an vn wa 0
b1v1
b2v2 bn vn wb 0
r1v1 r2v2 rn vn wr 0
程中式的式中常中,数的ai、项系b。i数、相,…应、a0的、ri(改b0i、正= …1数,2、条,…r件0…为方n各)程平为式差各值平条差件值方条程件方式
E QAT
0
N 1 QAT N 1
0
N 1 AQ QAT N 1 AQ
0
0
0
Q
QAT
N
1
AQ
QLˆL
QLˆW
QLˆK
QLˆV
QLˆLˆ
由上式可见,平差值与闭合差W、联系数K、改 正数V是不相关的统计量,又由于它们都是服 从正态分布的向量,所以与W、K、V也是相互 独立的向量。
平差值函数的协因数
单一附合导线条件平差
设AB边方位角已知值为TAB = T0,CD边方位角已知值为TCD、 计算值为Tn+1,B点坐标的已知值为(,)或者(x1, y1),C点坐 标的已知值为(,)、计算值为(xn+1, yn+1)。三个条件中,有 一个方位角附合条件、两个坐标附合条件。
3.1第1讲(条件平差原理)

v1 v 2 V = n ,1 M v n
ˆ L1 ˆ L ˆ L = 2 n ,1 M ˆ Ln
n ,1
ˆ L = L+V
n ,1
n ,1
p1 ˆ L1 L1 + v1 ˆ L2 + v 2 P = L2 = M M n ,n ˆ Ln + v n Ln
p2
O pn
一、条件平差原理
L 有n个观测值 n ,1 ,均含有相互独立的偶
然误差, 然误差,相应的权阵为 P ,改正 n,n ˆ V ,平差值为 L ,用矩阵 数为 n,1 n ,1 表示为: 表示为:
2012-3-29
必要 观测 数t, 多余 观测 数为r 数为r r=nr=n-t
1
第三章 条件平差
第一节
改正数条件方程: 改正数条件方程: a1v1 + a 2 v 2 + L + a n v n − wa = 0 b1v1 + b2 v 2 + L + bn v n − wb = 0 LLLLLLLLLLLLL r1v1 + r2 v 2 + L + rn v n − wr = 0 方程的闭合差
ˆ 2. L、W、K、V、L 的协因数阵及互 协因数阵
L=L
W = −( AL + A0 ) = − AL − A0
K = N −1W = − N −1 ( AL + A0 ) = − N −1 AL − N −1 A0 V = P −1 AT K
传播律中的K 传播律中的K
第三章 条件平差

返回目录 返回本节
经化简即有
cv t c g v ta c gv t a c g v t a c g v t b c g v tb g b
1 a 1
2 a 2
3 a 3
1 b 1
2 b 1
33
(1
sina1 sinb1
sina2 sinb2
sina3)
sinb3
=0,
圆周条件,即
c ˆ1c ˆ2c ˆ336 o0
或
V V V W 0
c1
c2
c3
4
第三类是极条件或称边长条件。满足上述4个条件方程
的角值还不能使图3-5的几何图形完全闭合,例如,由边
长通过a2、b2、c2计算边长,通过a1、b1、c1由计算边长,
再由通过a3、b3、c3计算边长,计算的结果,其边长不会
(3-21)
这就是极条件(3-20)的线性形式。
三、测边网
和测角同一样,在测边网中也可分解为三角形,大地 四边形和中点多边形三种基本图形。对于测边三角形,决 定其形状和大小的必要观测为三条边长。所以t=3,此时 r=n-t=3-3=0,即测边三角形不存在的条件方程。对于测边 四边形,决定第一个三角形必须观测3条边长,决定第二 个三角形只需要再增加2条边长,所以确定一个四边形的 图形,必须观测5条边长,即t=5,所以r=n-t=6-5=1,存在 一个条件方程。对于中点多边形,例如中点五边形,它由 四个独立三角形组成,此t=3+2×3=9,故有r=n-t=10-9=1。
法,将上式用台劳公式展开取至次项,即可得线性形式的
极条件方程。
将 a ˆ a v,b ˆ b v,c ˆ c v代入(3-20)式,
测量平差第三章

测量平差 第三章.题目:试确定各图形按条件平差时的条件式个数及其条件方程式。
解答:()a 条件方程式个数:422r =-=条件方程式为:1430A B H h h h H +++-=1230A H h h h H +++-=()b 条件方程式个数:844r =-=条件方程式为:4583872761650000h h h h h h h h h h h h +-=+-=+-=+-=()c 条件方程式个数为:1284r=-=条件方程式为:()d 条件方程式个数为:431r=-=条件方程式为:12343600L L L L +++-=21233465798681211100000h h h h h h h h h h h h h h h+-=++-=+--=+--=.题目:如图3-18所示水准网,A 、B 两点的高程已知,各观测高差及路线长度如表3-6所列。
试用条件平差法计算未知点的高程平差值及2P 和3P 之间平差后高差值7ˆh 的中误差。
表3-6图3-18解答:7,3, 4.n t r n t ===-=平差值条件方程为:12356734613000h0A Bh h h h h h h h h H h H -+-=+-=--=+--=改正数条件方程为:31255673461370703040v v v v v v v v v v v -+--=+-+=+-+=--=令C=1,观测值的全倒数为:11122112P-⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦111,,T TN AP A K N W V P A K---===得:[]()[]131011410015210230.46070.14610.12360.23600.14610.31460.11240.12360.12360.11240.32580.25840.23600.12360.25840.58430.432.84.40.3 3.8 1.22.01.359 2.0120.2590.6400.6530.9991.652TTN Nm m hh V -=--------=-----=+=- ()m下面求平差后7h 的中误差:[]123745670000001h h h h h h h h ⎡⎤⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥=⎢⎥⎢⎥⎢⎥⎢⎥⎢⎥⎣⎦[]~000001, 3.0()Tf m m σ===+10.7416TTTff Q f Qf f QA NAQf ---=中误差为:7h+2.6m m σ==.题目:如图所示的中点三角形,其内角观测值为等精度独立观测值,试用条件平差法,计算各观测角值的平差值及CD 边长的平差后的相对中误差。
第9讲第三章条件平差-条件方程2pdf

如图平面三角网,其中 A、B、C 为已知点,P 为未知点,观测值为 cotL1v1 cotL3v3 cotL4v4 cotL6v6 w极 0 ,观测 各内角 Li ( i 1,2, ,6 )
(3)固定边条件一个
ˆ ,L ˆ L v , 值的平差值为 L i i i i
20
C 75
(2)圆周条件(水平条件) 圆周条件的个数等于中心点的条数。
9 3 6 D 4 2 B
ˆ L ˆ L ˆ 3600 0 L 3 6 9
A
8 1
ˆ L v 代入: 将L i i i L3 v 3 L6 v 6 L9 v 9 3600 0
v3 v6 v9 w4 0,w4 L3 L6 L9 3600
17
二、条件方程的形式
例 1:在右图所示的水准网中(箭头指 向高端) ,设观测高差为 h1 , h2 , h3 , h4 , h5 ,高 ˆ ,h ˆ ,h ˆ ,h ˆ ,h ˆ ,列出最或 差的最或然值为 h 1 2 3 4 5 然值及改正数应满足的条件关系式。
ˆ h ˆ ˆ h h 0 1 2 4 ˆ h ˆ ˆ 0 h h 2 3 5
28
观测值独立时
N AP 1 AT
C 75 6 D 3 A 8 1 4 2 B
n=9 t=4 r=n-t=9-4=5
9
19
(1)图形条件(内角和条件) 独立图形条件的个数等于互不重叠的三角形个数再加实 对角线的条数。
ˆ L ˆ L ˆ 180 0 0 ABD : L 1 2 3 ˆ L ˆ L ˆ 180 0 0 BCD : L 4 5 6 ˆ L ˆ L ˆ 180 0 0 ACD : L 7 8 9
条件平差

1
线性化,并经整理后得
[ctga1 ctg(a1 b1 )]va1 ctg(a1 b1 )vb1 ctga2va2 ctgb2vb2 ctg(a3 b3 )va3 [ctg(a3 b3 ) ctgb3 ]vb3 w 0
w (1 sin(a1 b1 ) sin b2 sin b3 )
主要内容
第一节 条件平差原理 第二节 条件方程 第三节 精度评定 第四节 水准网平差示例
第1页/共37页
第一节 条件平差原理 ( ) 介绍条件平差原理,给出计算公式
一、基础方程及其解
设有r个观测值平差值线性条件方程:
ALˆ A 0 a1Lˆ1
a2 Lˆ2
...Βιβλιοθήκη an Lˆna00
b1Lˆ1 b2 Lˆ2 ... bn Lˆn b0 0( 4-1-5),矩阵形式为:
...
sin a1 sin a2 sin b1 sin b2
sin a3 sin b3
ctgb3
vb3
0
ctga1va1
...
ctga3va3
ctgb1vb1
... ctgb3vb3
(1 sin a1 sin a2 sin a3 ) 0
sin b1 sin b2 sin b3 第21页/共37页
..................................
0
r1Lˆ1 r2 Lˆ2 ... rn Lˆn r0
0
注意:第一个条件方程系数到最后一个条件方程系数分别 采用字母a-r,下标与观测值编号对应。r是最后一个条件方 程的编号,表示条件方程个数为r,但是r数目与r在英文字 母中序号无关。
求其一阶偏导数,并令其为0:
测量平差复习资料03[1]
![测量平差复习资料03[1]](https://img.taocdn.com/s3/m/ecc0ff23af45b307e87197ae.png)
《测量平差》复习题 第一章: 绪论1、观测量的真值:任何观测量,客观上总存在一个能反映其真正大小的数值,这个数值称为观测量的真值。
2、观测误差:观测量的真值与观测值的差称为观测误差。
3、观测条件:仪器误差、观测者和外界环境的综合影响称为观测条件。
4、根据误差对观测结果的影响,观测误差可分为哪几类:根据误差对观测结果的影响,观测误差可分为系统误差和偶然误差两类。
5、误差公理:在测量中产生误差是不可避免的,即误差存在于整个观测过程,称为误差公理6、观测条件与观测质量之间的关系:观测条件好,观测质量就高,观测条件差,观测质量就低。
7、怎样消除或削弱系统误差的影响?一是在观测过程中采取一定的措施;二是在观测结果中加入改正数。
8、测量平差的任务:⑴ 求观测值的最或是值(平差值);⑵ 评定观测值及平差值的精度。
第二章:误差理论与平差原则1、描述偶然误差分布常用的三种方法: ⑴ 列表法;⑵ 绘图法;⑶ 密度函数法。
2、偶然误差具有哪些统计特性?(1) 有界性:在一定的观测条件下,误差的绝对值不会超过一定的限值。
(2) 聚中性:绝对值较小的误差比绝对值较大的误差出现的概率要大。
(3) 对称性:绝对值相等的正负误差出现的概率相等。
(4) 抵偿性:偶然误差的数学期望或偶然误差的算术平均值的极限值为0。
3、由偶然误差特性引出的两个测量依据是什么? ⑴ 制定测量限差的依据;⑵ 判断系统误差(粗差)的依据。
4、精度:精度指的是误差分布的密集或离散的程度。
5、观测量的精度指标有:(1) 方差与中误差;(2) 极限误差;(3) 相对误差。
6、极限误差:在一定条件下,偶然误差不会超过一个界值,这个界值就是极限误差。
通常取三倍中误差为极限误差。
当观测要求较严时,也可取两倍中误差为极限误差。
7、误差传播律是用来解决什么问题的?是用来求观测值函数的中误差。
8、应用误差传播律的实际步骤:(1) 根据具体测量问题,分析写出函数表达式),,,(21n x x x f z =;(2) 根据函数表达式写出真误差关系式n nx x f x x f x x f z ∆∂∂++∆∂∂+∆∂∂=∆ 2211; (3) 将真误差关系式转换成中误差关系式。
第03章 条件平差

zqz99@
设观测值的权阵P为n×n的对角阵,又设联系
数矩阵K=(ka,kb,…,kr)T,则式(3-11)可用矩阵表 示为: Φ=VTPV-2KT(AV+W) 为求新函数Φ的极值,对上式的变量V求其一阶
偏导数,并令其为零。即
d d (V T PV ) d ( 2 K T ( AV W )) dV dV dV
zqz99@
2.1条件平差概述
在图3-1中,设HA为A点的已知高程,为了确定B、C 两点的高程,只要观测两个高差就够了,即必要观测数 为t=2,而图中按箭头方向观测了h1、h2、h3三个高差, 则n=3,因为有了多余观测(r=1),所以三个观测高差的 平差值产生了一个条件,即 ˆ h ˆ h ˆ 0 h
zqz99@
zqz99@
zqz99@
zqz99@
条 件 制约和影响事物存在、发展的
外部因素
zqz99@
第三章
1
2 3 4 5 6
条件平差
§1 条件平差原理
§2 必要观测与多余观测 §3 条件方程 §4 条件平差方程式 §5 条件平差的精度评定 §6 条件平差举例
式(3-13)称为改正数方程
vi
1 (ai ka bi kb ri kr ) pi
(3-13)
zqz99@
若多余观测为2, 即条件方程只有2个, 改正数方程为:
若多余观测为3, 即条件方程只有3个, 改正数方程为:
vi
v1
1 (ai ka bi kb ) pi
vi
v1
1 (ai ka bi kb ci kc ) pi
1 (a1ka b1kb ) p1 1 v2 (a2 ka b2 kb ) p2 1 vn (an ka bn kb ) pn
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
这些条件方程式(或改正数条件方程式),大体 上分为两类:其一是闭合路线情况,如条件方 程式中前四个条件方程式,可称为闭合条件方 程式;其二是附合路线情况,如条件方程式中 第五个,反应的是从A点出发后测得的B点的高 程值是否与 B 点的已知高程值相等的问题,可 称为附合条件方程式。
§3-3
平差值函数的协因数
T 1 QL ˆL ˆ Q QA N AQ
代入式得 Q f Q f f (Q QA N AQ) f 即 此式即为平差值函数式的协因数表达式。 该平差值函数的方差
FF T ˆL ˆ L T T 1
QFF f T Qf f T QAT N 1 AQf
测量平差
太原理工大学测绘科学与技术系
第三章
条件平差
第三章
§3-1
§3-2
条件平差
条件平差原理
高程网条件平差
§3-3
§3-4
导线网条件平差计算
三角网条件平差计算
§3-5
§3-6
附有参数的条件平差
条件平差估值的统计性质
§3-1
条件平差原理
n ,1 n ,n
n ,1
L 设在某个测量作业中,有n个观测值 ,均含有相互 V P 独立的偶然误差,相应的权阵为 ,改正数为 , ˆ ,表示为 平差值为 nL ,1
§3-2
高程网条件平差
高程网包括水准网和三角高程网。对高 程网进行条件平差时,一般以已知高程 点的高程值作为起算数据,以各测段的 观测高差值作为独立观测值,写出其满 足的条件关系式,按照条件平差的原理 解算各高差值的改正数和平差值,然后 再计算出各待求点的高程平差值,并进 行精度评定。
高程网条件方程的个数及条件方程式
1 2 4
0 0 0 0
相对应的改正数条件方程式形式
v1 v 2 v 4 w1 0 v 2 v 3 v 5 w2 0 v 4 v 6 v 7 w3 0 v 5 v 7 v 8 w4 0 v 2 v 7 w5 0
V P 1 AT K P 1 AT (N 1 AL N 1 A0 ) P 1 AT N 1 AL P 1 AT N 1 A0
ˆ L V L (P 1 AT N 1 AL P 1 AT N 1 A ) (E P 1 AT N 1 A)L P 1 AT N 1 A L 0 0
p1 P n ,n
v1 v2 vn
p2
pn
ˆ L 1 ˆ ˆ L2 L n ,1 ˆ L n
条件平差原理
可以列出r个平差值线性条件方程
a1v1 a 2 v 2 a n v n wa 0 b1v1 b2 v 2 bn v n wb 0 r1v1 r2 v 2 rn v n wr 0
其中
高程网条件方程的个数及条件方程式
w1 (h1 h2 h4 ) w2 (h2 h3 h5 ) w3 (h4 h6 h7 ) w4 (h5 h7 h8 ) w5 (h2 h7 H A H B )
dV V 2 V 2V P 2 K A 0
V T P KT A 得 上式两端转置,得
P T V AT K
条件平差原理
由于P是主对角线阵,则 P = P T ,得 将上式两边左乘权逆阵P – 1,得
V P 1 AT K
PV AT K
此式称为改正数方程,其纯量形式为 1 v (a k b k r ( ik = )1,2,…,n) p 将上式代入,得
2 ˆ0 T
r
ˆ0
T
r
式中r为多余观测值个数,r = n – t。
协 因 数 阵
条件平差的基本向量L、W、K、V、都可以表达成 随机向量L的函数
LL
W AL A0
K N 1W N 1 ( AL A0 ) N 1 AL N 1 A0
协 因 数 阵
按协因数传播律,得Z的协因数阵为
ˆ L
QZZ
QLL QWL Q KL QVL Q ˆL L
QLW QWW Q KW QVW QL ˆW
Q LK QWK Q KK QVK QL ˆK
QLV QWV QKV QVV QL ˆV
Q LL ˆ Q QAT QWL ˆ AQ N N 1 AQ Q KL ˆ E T 1 T QA N AQ QA QVL ˆ Q QAT N 1 AQ 0 QL ˆL ˆ
2 ˆ0 DFF QFF
条件平差的计算步骤
( 1)根据实际问题,确定出总观测值的个数n、必要观测 值的个数t及多余观测个数r = n - t,进一步列出最或是值 条件方程或改正数条件方程; (2)组成法方程式; (3)计算出联系数K; (4)计算出观测值改正数V;并计算出观测值的平差值; (5)计算单位权方差和单位权中误差; (6)列出平差值函数关系式,并对其全微分,求出其线 性函数的系数阵f,计算出平差值函数的协因数QFF ,计 算出平差值函数的协方差DFF。
QAT N 1 QAT N 1 AQ Q QAT N 1 AQ E AQ 0 1 1 N N AQ 0 QAT N 1 QAT N 1 AQ 0 T 1 0 0 Q QA N AQ
由上式可见,平差值与闭合差W、联系数K、改 正数V是不相关的统计量,又由于它们都是服 从正态分布的向量,所以与W、K、V也是相互 独立的向量。
)的
协因数QFF及其中误差 ˆ 的计算等。
计算单位权方差和中误差的估值
单位权中误差的计算公式为
ˆ0 [ p] r
在一般情况下,观测值的真误差△是不知 道的,也就不可能利用上式计算单位权 中误差。但在条件平差中,可以通过观 测值的改正数V来计算单位权方差和中误 差: V PV V PV
若取
a1 a 2 b b 2 A 1 r ,n r1 r2
an bn rn
a 0 b A0 0 r ,1 r0
wa w W b r ,1 wr
平差值函数的协因数
设有平差值函数
ˆ f (L ˆ ,L ˆ , , L ˆ ) F 1 2 n
对上式全微分得
ˆ f dL ˆ f dL ˆ f dF 1 2 L L L ˆ ˆ ˆ ˆ L ˆL 1 L 2 L n ˆ dL n ˆL L
高程网条件方程的个数及条件方程式
则多余观测个数r = n – t = 8 - 3 = 5,可以写出这5个 ˆ h ˆ h ˆ 0 h 条件方程式
ˆ h ˆ h ˆ h 2 3 5 ˆ h ˆ h ˆ h 4 6 7 ˆ h ˆ h ˆ h 5 7 8 ˆ h ˆ H H h 2 7 A B
进行条件平差时,首先要确定条件方程的个数。 从上节内容可知道,在一般情况下,条件方程式 的个数与多余观测的个数r相符。而要确定多余观 测个数就必须先确定必要观测个数t。 高程测量(包括三角高程测量和水准测量)的主 要目的是确定未知点的高程值。如图所示高程网 中,有2个已知高程点A、B,3个未知高程点C、D、 E和8个高差观测值。从图中可以看出,要确定3 个未知点的高程值,至少需要知道其中的3个高 差观测值(如h1、h2、h3,或h6 、h7 、h8 ,或h2、 h4 、h5 等多种选择),即必要观测个数t = 3。
上式两边左乘法方程系数阵N的逆阵N – 1,得 联系数K的唯一解: K N W 代入前式,可计算出V,再将V代入,即可计算出 ˆ L V 所求的观测值的最或然值。 L
1
精 度 评 定
2 ˆ0 精度评定包括单位权方差 和单位权中
误差
ˆ0
的计算、平差值函数(
F
ˆ) F f (L
L1 L L 2 n ,1 Ln
v1 v V 2 n ,1 v n
其中
在这n个观测值中,有t个必要观测数,多余观测 数为r。
ห้องสมุดไป่ตู้
ˆ L L1 1 ˆ L2 L2 ˆ L Ln n
式中,ai、bi、…、ri(i = 1,2,……n)为各平差值条件方 程式中的系数, a0、b0、…、r0 为各平差值条件方程式 中的常数项。相应的改正数条件方程式
ˆ a L ˆ a L ˆ a 0 a1 L 1 2 2 n n 0 ˆ b L ˆ b L ˆ b 0 b1 L 1 2 2 n n 0 ˆ r L ˆ r L ˆ r 0 r1 L 1 2 2 n n 0
i i a i b i r i
AP1 AT K W 0
此式称为联系数法方程(简称法方程)。
条件平差原理
取法方程的系数阵 AP-1AT = N,由上式易知N阵关 于主对角线对称,得法方程表达式
NK W 0
法方程数阵N的秩 即N是一个r阶的满秩方阵,且可逆。移项得
NK W
R( N ) R( AP1 AT ) r
将向量L、K、V、组成列向量,并以Z表示之
0 L E A W A 0 1 K N A0 N 1 A Z L 1 T 1 P A N A0 V P 1 AT N 1 A L 1 T 1 ˆ P A N A0 E P 1 AT N 1 A
上式可分别表达成矩阵形式如下