3DM-S10X用户指南(1).
Silicon Labs Connect v3.x 用户指南说明书
UG435.07: Energy Saving with Silicon Labs Connect v3.xThis chapter of the Connect v3.x User’s Guide discusses techni-ques to reduce power consumption of network applications based on the Silicon Labs Connect Stack. The Connect stack is delivered as part of the Silicon Labs Proprietary Flex SDK v3.0 and higher. The Connect v3.x User's Guide assumes that you have already installed the Simplicity Studio development environ-ment and the Flex SDK, and that you are familiar with the basics of configuring, compiling, and flashing Connect-based applica-tions. Refer to UG435.01: About the Connect v3.x User's Guide for an overview of the chapters in the Connect v3.x User's Guide. The Connect v3.x User's Guide is a series of documents that provides in-depth infor-mation for developers who are using the Silicon Labs Connect Stack for their applica-tion development. If you are new to Connect and the Proprietary Flex SDK, see QSG168: Proprietary Flex SDK v3.x Quick Start Guide.Proprietary is supported on all EFR32FG devices. For others, check the device's data sheet under Ordering Information > Protocol Stack to see if Proprietary is supported. In Proprietary SDK version 2.7.n, Connect is not supported on EFR32xG22.KEY POINTS•Discusses Silicon Labs Connect energy modes.•Describes the support for sending data to sleepy end devices.•Describes additional methods for reducing1. Introduction to Energy ModesIn battery-powered microcontroller applications, saving energy is essential. By reducing current consumption, the application's effective battery life can be significantly increased.The Wireless Gecko (EFR32™) portfolio supports five Energy Modes:•Run Mode (Energy Mode 0)•Sleep Mode (Energy Mode 1)•Deep Sleep Mode (Energy Mode 2)•Stop Mode (Energy Mode 3)•Hibernate Mode / Shut Off Mode (Energy Mode 4)Of these five energy modes, Silicon Labs Connect supports EM0, EM1, and EM2.1.1 Energy Mode 0This is the default mode. In this mode, the CPU fetches and executes instructions from flash or RAM, and all peripherals are available.1.2 Energy Mode 1In sleep mode, the clock to the CPU is disabled. All peripherals, as well as RAM and flash, remain available. By using the Peripheral Reflex System (PRS) and DMA, several operations can be performed autonomously. This helps save power by halting the main loop of the application but does not interfere with the timely handling of interrupts. For example, the radio can still receive packets in EM1.1.3 Energy Mode 2In deep sleep mode, no high-frequency oscillators run, which means that only asynchronous and low-frequency peripherals are availa-ble. This mode further improves energy efficiency while still allowing for a range of activities. In this mode, the radio is shut down and the node will not receive packets.1.4 Power Manager ComponentPower Manager is a platform-level software module that manages the system's energy modes. In case of the example applications, the Power Manager component is enabled by default. Silicon Labs recommends using Power Manager to control the energy modes of the applications.Figure 1.1. Silicon Labs Connect Power Manager ComponentThe application and the components can control the lowest allowed energy mode through the following power manager API calls:void sl_power_manager_add_em_requirement(sl_power_manager_em_t em);void sl_power_manager_remove_em_requirement(sl_power_manager_em_t em);1.5 Support for Sending Data to Sleepy End DevicesWhen a sleepy end device is in sleep mode, the MCU is stopped and the radio is turned off. As a result, the device is not able to re-ceive data from other parties. To overcome this issue, when a sleepy device wakes up it check whether messages are waiting to re-ceive. Silicon Labs Connect supports two ways to send data to sleepy end devices:•Indirect Queue•Mailbox (uses Indirect Queue)Note: If a device is configured as a sleepy end device, the radio is always in idle mode except when it transmits or during some limited period when it waits for specific message such as an acknowledge or pending frame. Conversely, non-sleepy devices are always in reception mode except during transmit periods.1.5.1 Indirect QueueIndirect queue is a component within parent support, which is implicitly enabled in coordinators (or range extenders) in star (or exten-ded star) topologies due to the Parent Support component. On the device side, the Poll component must be enabled to retrieve infor-mation from the coordinator—for example ,in cases when a request needs longer processing time, an end device may choose to sleep (to allow processing to complete) and retrieve the information when it wakes up later.The coordinator holds such data until it is requested by the relevant end device. In this case, to obtain data from the coordinator an end device must first poll the coordinator to determine whether any data is available. To achieve this, the device sends a data request which the coordinator acknowledges. Then, the coordinator determines whether it has any data for the requesting device. If it does, it sends a data packet which the receiving device may acknowledge.1.5.1.1 Coordinator/Extender SettingsThere are two parameters in the Parent Support component that modify the indirect queue behavior:•Indirect Queue Size determines how many packets can be in the queue at a time. If the queue is full, no additional items can be added to the queue until space in the queue is recovered—either by items being sent to the recipient device, or by items aging out (timeout reached).•The Indirect Transmission Timeout value is specified in milliseconds. Messages older than the specified timeout will be dropped by the coordinator.The following figure shows where to select the Silicon Labs Connect Parent Support component.Figure 1.2. Silicon Labs Connect Parent Support ComponentOn the coordinator side, no additional effort need be taken. In Connect, the stack handles the messages sent to a sleepy device.1.5.1.2 Sleepy End Device SettingsOn a sleepy end device, the Poll component should be enabled to receive stored messages from the coordinator. The following figure shows the available settings of the Poll component.Figure 1.3. Silicon Labs Connect Poll ComponentWhen the sleepy end device polls for messages, it sends a Data request to the coordinator and waits for the Acknowledge. If there is pending data addressed to the sleepy end device, the coordinator sets the Frame Pending bit in the Frame Control Field. Otherwise, that bit is not set. The sleepy end device checks the Frame Pending bit and waits for the next message from the coordinator. If the Frame Pending bit is not set, there is no pending message for the device and therefore it can return to sleep mode.The Poll component supports short and long poll intervals. Short poll is used to obtain data from the coordinator while long poll is used for "keep alive" purposes to make sure the sleepy end device is kept in the coordinator's child table.Switching between short and long polling is possible with the following Silicon Labs Connect API call:void emberAfPluginPollEnableShortPolling(bool enable);To poll for data the Poll component uses this API call:EmberStatus emberPollForData(void);which sends a data request command to the parent node.If there is a message waiting in the indirect queue, the device will receive it through this callback:void emberAfIncomingMessageCallback(EmberIncomingMessage *message)With a single poll, a device can retrieve only a single message. Therefore, to receive all pending messages, it is necessary to poll re-peatedly until no additional messages are received.1.5.2 MailboxThe Mailbox function is implemented at the application level. Mailbox is used to send information to a sleepy end device from the coor-dinator or from another device. In the case of sleepy devices, Mailbox uses the Indirect Queue feature of the stack to retrieve messag-es. Mailbox consists of two parts:•Mailbox Client•Mailbox ServerWith Mailbox, assignment of the client or server role is flexible. (For example, it is possible to add the server to an end device and the client to the coordinator.) Mailbox uses endpoints to transfer messages between clients and server. The endpoint selected for the proto-col is set in both the server and client component, and they must match. On the server side, two other parameters can be set: the maximum number of packets the server can store and their timeout. These values can be set in the Universal Configurator (see the following two figures).Figure 1.4. Silicon Labs Connect Mailbox Client ComponentFigure 1.5. Silicon Labs Connect Mailbox Server ComponentMailbox is not supported in MAC mode because it uses endpoints which are implemented in the Silicon Labs Connect Network layer. However, it works in Connect Direct mode where the application should implement sleep.The main advantage of using Mailbox is the server will notify clients that submit messages when a message was delivered or when it could not be delivered due to an error.1.5.2.1 Mailbox ClientThe Mailbox client can submit messages and check the inbox. In both cases, the result is delivered through callback functions.Check-related API calls:emberAfPluginMailboxClientCheckInbox()emberAfPluginMailboxClientCheckInboxCallback()Submit-related API calls:emberAfPluginMailboxClientMessageSubmit()emberAfPluginMailboxClientMessageSubmitCallback()emberAfPluginMailboxClientMessageDeliveredCallback()Note: The default value of the short poll interval is 4 quarter seconds (1s) while the Handshake timeout of the Mailbox Client is set to 250ms. Thus, it can happen that the Mailbox Client timeouts during waiting to poll for the pending message. Silicon Labs recommends setting these values to suit the application. This usually means that the Handshake timeout should be higher than the short poll interval.1.5.2.2 Mailbox ServerOn the server side, to set up the Mailbox system, you only need to enable the Connect Mailbox Server component. No additional code is necessary. However, if desired, there are available support functions that enable the server to add messages directly to the mailbox using these API calls:emberAfPluginMailboxServerAddMessage()emberAfPluginMailboxServerMessageDeliveredCallback()1.6 Additional Methods for Reducing Energy ConsumptionTo fully minimize power consumption, disable unnecessary features and unused peripherals.1.6.1 SPI FlashAll Silicon Labs EFR32 radio boards contain SPI Flash. Although these flash devices consume only 8-10µA in standby state, this con-stant drain will increase the apparent sleep current and reduce effective battery life. However, these flash devices have a deep power down mode which is accessed by issuing an SPI command. In the case of Silicon Labs radio boards, the default configuration is that the firmware puts the external SPI flash into deep power down mode through the MX25 Flash Shutdown component.1.6.2 Network Up LEDBy default, some Connect examples use an LED to show the network stack status. This LED is turned on when the stack is up.void emberAfTickCallback(void){if (emberStackIsUp()) {sl_led_turn_on(&sl_led_led0);} else {sl_led_turn_off(&sl_led_led0);}}To save energy, remove the sl_led_turn_on(&sl_led_led0); line or change it to sl_led_turn_off(&sl_led_led0);.As a rule of thumb, the aim is to spend as much time in sleep mode as possible and wake up only for short periods when necessary. Applying the above techniques, the sleep-mode current consumption of Silicon Labs Connect-based applications can be reduced to2-4 µA.Smart. Connected. Energy-Friendly.Products /productsQuality/qualitySupport and CommunitySilicon Laboratories Inc.400 West Cesar ChavezAustin, TX 78701USADisclaimerSilicon Labs intends to provide customers with the latest, accurate, and in-depth documentation of all peripherals and modules available for system and software implementers using or intending to use the Silicon Labs products. Characterization data, available modules and peripherals, memory sizes and memory addresses refer to each specific device, and "Typical" parameters provided can and do vary in different applications. Application examples described herein are for illustrative purposes only. Silicon Labs reserves the right to make changes without further notice to the product information, specifications, and descriptions herein, and does not give warranties as to the accuracy or completeness of the included information. Without prior notification, Silicon Labs may update product firmware during the manufacturing process for security or reliability reasons. Such changes will not alter the specifications or the performance of the product. Silicon Labs shall have no liability for the consequences of use of the information supplied in this document. This document does not imply or expressly grant any license to design or fabricate any integrated circuits. The products are not designed or authorized to be used within any FDA Class III devices, applications for which FDA premarket approval is required, or Life Support Systems without the specific written consent of Silicon Labs. A "Life Support System" is any product or system intended to support or sustain life and/or health, which, if it fails, can be reasonably expected to result in significant personal injury or death. Silicon Labs products are not designed or authorized for military applications. Silicon Labs products shall under no circumstances be used in weapons of mass destruction including (but not limited to) nuclear, biological or chemical weapons, or missiles capable of delivering such weapons. Silicon Labs disclaims all express and implied warranties and shall not be responsible or liable for any injuries or damages related to use of a Silicon Labs product in such unauthorized applications.Trademark InformationSilicon Laboratories Inc.®, Silicon Laboratories®, Silicon Labs®, SiLabs® and the Silicon Labs logo®, Bluegiga®, Bluegiga Logo®, Clock B uilder®, CMEMS®, DSPLL®, EFM®, EFM32®, EFR, Ember®, Energy Micro, Energy Micro logo and combinations thereof, "the world’s most energy friendly microcontrollers", Ember®, EZLink®, EZRadio®, EZRadioPRO®, Gecko®, Gecko OS, Gecko OS Studio, ISOmodem®, Precision32®, ProSLIC®, Simplicity Studio®, SiPHY®, Telegesis, the Telegesis Logo®, USBXpress® , Zentri, the Zentri logo and Zentri DMS, Z-Wave®, and others are trademarks or registered trademarks of Silicon Labs. ARM, CORTEX, Cortex-M3 and THUMB are trademarks or registered trademarks of ARM Holdings. Keil is a registered trademark of ARM Limited. Wi-Fi is a registered trademark of the Wi-Fi Alliance. All other products or brand names mentioned herein are trademarks of their respective holders.。
Techno HDS系列数控路由器用户手册说明书
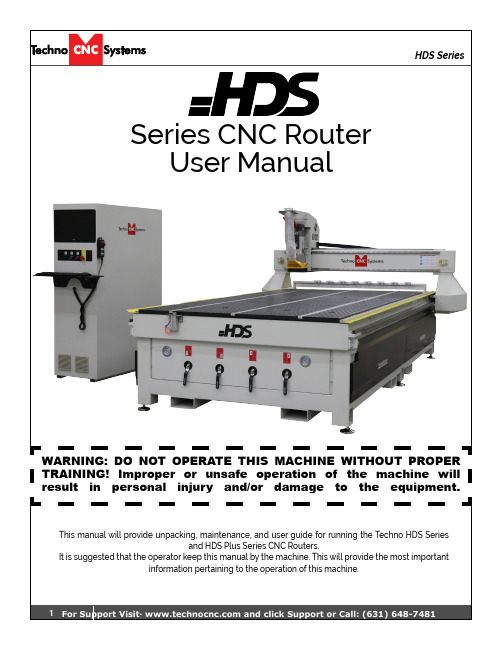
This manual will provide unpacking, maintenance, and user guide for running the Techno HDS Seriesand HDS Plus Series CNC Routers.It is suggested that the operator keep this manual by the machine. This will provide the most importantinformation pertaining to the operation of this machine.WARNING: DO NOT OPERATE THIS MACHINE WITHOUT PROPER TRAINING! Improper or unsafe operation of the machine will result in personal injury and/or damage to the equipment.1.3 Correct Colleting:Spindle Warm-up:1.3.6 —HSD Spindle WarmupRead these instructions thoroughly BEFORE operating machine.AND ADJUSTMENTPREHEATINGuses high-precision angular contact bearing pairs,pre-loaded and lubricatedgrease for high speeds.machine is switched on for the first time every day,allow the electrospindle preheating cycle in order to allow the bearings to gradually attain a uniform and hence to obtain a uniform expansion of the bearing races and thefollowing cycle is recommended,without machining operations:%of the maximum rated speed for2minutes.%of the maximum rated speed for2minutes.%of the maximum rated speed for1minute.preheating cycle should also be performed every time that the machine is inoperative the electrospindle to cool down to room temperature.for HSK versions:forbidden to run the electrospindle without the tool-holder inserted.While the machine is operating,the spindle can reach high temperatures.Be to touch it without due precautions.1.4.2All the electronics for the HDS machine are located in the housing cabinet. Do not open these doors when power is applied to the machine.1.4.3There are two rounded connectors on the side of the controller, these connectors provide 220 volts for the vacuum pump starter contactors.Lead the cable for 3 phase 220 volts that will be used to power machine through the hole on the bottom of the cabinet.220V in forpoweringmachine220V Outfor Vacuum PumpNetworkConnectionMotor/EncoderFig 1.4.3.Hole for mouse andkeyboard cableImproper electrical connections can result inFig 1.4.4.bFig 1.4.5 Should read90 psiFig 1.4.6starter. electronic unit.Attach the silver connectorfrom the starter box here. Attach the hoses from the machine to theT-connectors and attach them to the pump.Turn on individual sections of the vacuum table by turning the manifoldVacuum on and off functions are controlled by the Osai controllerand can only be turned on fromthe computer screen.To test the motor, press thereset button on the starter boxonce all connections are made.2432.1.2The red light on the front of the machine will light up. This indicates that 220 volts is coming into the machine.The Power ON light will light up Power OffPower ON E-stop: Turns off controller, motor and spindleUSB Port1243Press the Power ON button to start the system.Terminal192.168.0.1If the Boot Controller does not start after a minute and the message CNC is waiting for a BOOT mode directive appears on the screen, then normal mode needs to be selected.192.168.0.1The Axis not referenced error will appear.Click on “Home All” and all the axes will move to their home position. If any errors remain on the screen (i.e. Low Air Pressure,) rectify the problem and click on “Reset Errors” or “RESET” to remove the message.The machine is now ready to be jogged.Home AllReset ErrorsABC D E FGHJKLAFBC D EABCA - Home All:Sends the machine to the home position. (Absolute XYZ = 0). The Z axis will first move up to its limit, then the X and Y axes will move simultaneously.B - SINGLE AXIS HOME:When this button is left clicked, each axis can be homed separately. When the button is active, the user then clicks on the arrow key for the axis to be homed to enable the operation. [Ex: click single axis home, click X-, machine will home the x-axis only]C- CLEARANCE POSITION:A B C DA - Shroud Up/ Down:This button will raise or lower the dust shroud on the spindle.B - Pins Up / Down:This button will raise or lower the pop-up pins on the sides of the table.C - Vacuum 1 On/Off:This button will turn Vacuum 1 on and off, if it is connected. D - Vacuum 2 On/Off:This button will turn Vacuum 2 on and off, if it is connected.Shroud Up / Down and Pins Up / Down will only function if 90 lbs. of compressed air connected to the Vacuum 1 on/off and Vacuum 2 on/off send 220 volts to the starter coil of the vacuum pump, thus DownUpDown UpABCA - Offsets:Opens the Offset Menu. In this menu the user can save multiple offsets/originsand apply them to the coordinate system.B - I/O:Opens the Input and Output screen diagnostics. These screens will show thestates of the inputs and outputs.C - Tool:Opens the Tool Menu. In this menu the user can store tool lengths and changetool numbers.ABCDA - XYZ Coordinates:This displays the location of the machine. If the Origin No is zero,the numbers displayed are the distance from the Home position (Absolute XYZ = 0). If there is an Origin Number active, the numbers displayed are the distance from that origins zero position.B - Tool:This displays the tool that is currently in the spindle. If the number reads a single digit then there is no offset applied to that tool at this time. When the Tool displays 1.1, or 2.2, or 5.5 etc then the Z-offset is active. The Z-offset needs to be active when setting the origin.C - Origin No:This displays the active origin/ coordinate system. When it reads 0, no origin is active and the coordinate system displayed is the from the Home position. The system is setup to accommodate 8 origins, but many more can be made available.A B CA BC DEFG HBAA-Spindle On/Off :If you press the button beside the ON switch, you will turn the spindle on. If you press the button beside the OFF switch, you will turn the spindle off.B-AUX (Coolant) On/Off :Pressing the button beside On will turn the AUX (coolant) on, pressing the button beside Off will turn the AUX (coolant) off (it will do nothing if the system does not have a coolant).I-Load G-Code FileAA B C DE F GHI JA B C DE FGHA - Tool Offset Preset:This section allows the user to manually enter tool offsets.B - CHANGE TOOL:Left clicking on one of these buttons will make the machine pick up the corresponding tool number.C - IDENTIFY TOOL:Left clicking on one of these buttons will change the tool number on the screen and apply the Z-Offset to that specific tool D - Jog Functions:This is a minimized version of the regular jog functions.E - Z-Offset Update:Pressing one of these buttons will cause the Tool to move down until it touches the Tool Calibration Block, and then it will store the Z-offset for that tool number.F - Pneumatic Controls:This section controls dust shroud, chuck control and pop up pins.G - HOLD:IJ KABC D EFGHClick on the box beside the mode name toselect it.Increase (+) or decrease (-) the Jog Speed by pressing the (+) or (-) box. Speed is shown in % of maximum speed. Actual speed is displayed when the machine is running. Increase or decrease the Jog Step by pressing the (+) or (-) box. Step size in inches will be shown.When this mode is selected a Test box will appear.G-code commands can be entered in this box, then clicking Cycle Start will run the command. Eg,G0 X10Y10 in the box then Cycle start will move the machine to X10 Y10M3 S18000 will turn on the spindle at a speed of 18000rpmM5 will turn off the spindle.(UAO,03) will activate Origin 3-Click Reset to remove any offsets.-Click OFST # . Where # is the number of the Tool you have in the chuck.The machine will go to Top of the Z travel, then slowly move down to the pad. It will touch the brass colored section of the pad, retract, and then move down again to confirm the value. Repeat this procedure for the other tools.Tool Lengths are now learned. Press “RESET” to remove Blue Notification Warning take note of the T.OFFSET3To set the Origin:Move the machine to the location on the table you want to set as XYZ. Use the handwheel for precision.XYZ zero position is the location point on a drawing in a CAD/CAM package where X,Y and Z all equal zero. Generally, XY zero is on the bottom left corner and Z zero is the top of the part. The letters to be cut are located away from the XY zero.Once in position switch to Continuous Jog Continuous must be active to save origin.1 023 Locate the File you want to load.Left click on the file.Manual Setup will allow the user to change the Jog step size.Checking Auto will mean the machine will jog the full step size when the jog arrow is pressed once. Checking Manual will mean the machine will only jog while the arrow is held down. When it reaches the step size, it will stop and the user will have to release the button and press again.All the other options on this window are disabled.Click on Browse and pick / create a suitable folder to save the backup, enter a suitable file name for the backup and click Save.To Restore a saved backup, just reboot in setup mode again, and select Restore to load the saved settings.Y axisX axisZ axis(Diagram 2. The current aggregate angle.)(Diagram 3. Loosen these screws to adjust the aggregate angle.)Diagram 1 illustrates how the aggregate must be seated in the ISO30 tool clip.Diagrams 2 and 3 illustrate how to adjust the angle of the aggregate cutting tools. It is essential that the pin (shown in Diagram 1) remains in the shown position so that it aligns with the aggregate tool ring and ISO30 tool clip.1312Wipe the linear rails and bearings once a day to assure smooth play free motion.Lubricate the rack and pinion and the ball screw drive once every week so as to ensure longer service life.When lubricating the z-axis screw,recommended to use Kluber TA 15/2 or PETAMOGY 193 or equivalent.Caution:Switch off the main power supply before servicing. If power supply needed, qualified personnel shall operate it.Clean the cabinet with dust collector once every week. Be careful not to damage or loosen any wire connections. Compressed air may be used but from at least 4 foot distance.Check the fan filters every month. Clean and / or replace if necessary.。
BG-PACKSHOT-C10X HD直播相机用户手册说明书

BG-PACKSHOT-C10X HD LIVE CAMERAUser ManualAttentionThis manual introduces functions, installation and operation for this live camera. Please read this manual carefully before installation and use.1. Caution1.1 Avoid damage to product caused by heavy pressure, strong vibration or immersion during transportation, storage and installation.1.2 Housing of this product is made of organic materials. Do not expose it to any liquid, gas or solids which may corrode the shell.1.3 Do not expose the product to rain or moisture.1.4 To prevent the risk of electric shock, do not open the case. Installation and maintenance should only be carried out by qualified technicians.1.5 Do not use the product beyond the specified temperature, humidity or power supply specifications.1.6 Wipe it with a soft, dry cloth when cleaning the camera lens. Wipe it gently with a mild detergent if needed. Do not use strong or corrosive detergents to avoid scratching the lens and affecting the image;1.7 This product contains no parts which can be maintained by users themselves. Any damage caused by dismantling the product by user without permission is not covered by warranty.2. Electrical SafetyInstallation and use of this product must strictly comply with local electrical safety standards.The power supply of the product is ±12V, the max electrical current is 2A.3.Install3.1Do not rotate the camera head violently, otherwise it may cause mechanical failure.3.2This product should be placed on a stable desktop or other horizontal surface. Do not install the productobliquely, otherwise it may display inclined image.3.3Ensure there are no obstacles within rotation range of the holder.3.4Do not power on before completely installation.4. Magnetic InterferenceElectromagnetic fields at specific frequencies may affect the video image. This product is Class A. It may cause radio interference in household application. Appropriate measure is required.Content1. CAMERA INSTALLA TION (3)1.1C AMERA I NTERFACES (3)1.2P OWER-ON I NITIAL C ONFIGURATION (3)1.3V IDEO O UTPUT (3)2.PRODUCT OVERVIEW (4)2.1P RODUCT I NTRODUCTION (4)2.1.1 Dimension (4)2.1.2 Accessories (4)2.2M AIN F EATURES (4)T ECHNICAL P ARAMETERS (5)2.3I NTERFACES AND C ONNECTION (6)3. APPLICA TION INSTRUCTION (7)3.1R EMOTE C ONTROL (7)3.1.1M A TCH C ODE FOR W IRELESS R EMOTE C ONTROL (7)3.1.2 Keys Introduction for IR Remote Control (7)3.2M ENU I NTRODUCTION (9)3.2.1 Main Menu (9)4. MAINTENANCE AND TROUBLESHOOTING (15)4.1C AMERA M AINTENANCE (15)4.2T ROUBLESHOOTING (15)5. WARRANTY (16)6. MISSION STA TEMENT (16)1. Camera Installation1.1 Camera Interfaces1.1 Product Interfaces1. Built in pick-up 4. Screw Hole for Tripod 7. HDMI Interface2. Focusing aid 5. Tripod Screw Hole 8. USB3.0 Interface3. Lens 6. Power Switch 9. Image Orientation Switch1.2 Power-on Initial Configuration1) Power-on: Connect DC12V power supply adapter with power supply socket2) Initial Configuration: The movement first shrinks and then stretches after power on, finally returns to the front, and the camera is normally identified on the computer, indicating that the self-checking is completed.1.3 Video Output1) HDMI Video Outputa. HDMI video cable connection: as shown in Figure1.1 label 7b. Connect the camera and the monitor via HDMI video cable, and the video output is available after thecamera self-test.2) USB3.0 Video Outputa. USB 3.0 video cable connection: as shown in Figure1.1 label 8b. Connect the camera and the computer via USB3.0 video cable, open the video software and select theimage device to output the video.2.P roduct Overview2.1 Product Introduction2.1.1 DimensionsFigure 2.1 Product Dimension2.1.2 AccessoriesPlease check below standard accessories when unpacking the box.Standard AccessoriesWireless Remote ControlUSB3.0 CableUser Manual2.2 Main FeaturesThis product is a new HD camera for the live broadcasting industry. It features a unique image orientation switch, allowing the user to switch from landscape format to portrait format optimized for mobile devices. Equipped with advanced ISP processing algorithms it offers vivid and high resolution video with a strong sense of depth and fantastic color rendition. The camera is stable and reliable, and easy to operate and maintain. It is suitable for various live scene applications.Full HD Resolution: 1/2.8 inch high quality CMOS sensor. Resolution is up to 1920x1080 with frame rate up to 30fps.Optical Zoom Lens: 10X optical zoom lens and 68.8° wide angle lens.Multiple Video Interfaces: HDMI, USB3.0; Simultaneously output audio and video signalLeading Auto Focus Technology: Fast, accurate and stable auto focusing technology.Horizontal and Vertical Screen: Allows the user to switch formats from landscape to portrait to optimize for mobile devices.Professional Image Style: Supports beauty and jewelry style mode to tailor image to makeup and fashion applications.Built-in microphone: Dual microphone array with a 6 meter omnidirectional pickup pattern (optimal pickup distance is 3 meters), the noise suppression algorithm enhances voice capture.Multiple Audio/Video Compression Standards: Support YUY2/NV12/MJPG/H.264/H.265 videocompression format.Low Noise and High SNR: Super high SNR image is achieved with low noise CMOS. Advanced 2D/3D noise reduction technology further reduces the noise while ensuring high image clarity.Easy to use: No need to download drivers, USB output is plug and play with a convenient user experience. Technical ParametersCamera ParameterSensor1/2.8inch sensorEffective Pixels 2 megapixel, 16:9Video Format HDMI video format1080I@60fps, 1080I@50fps, 1080P@30fps, 1080P@25fps, 720P@60fps,720P@50fpsUSB3.0 interface video formatHorizontal screen: 1920×1080@30fps, 1280×720@30fps,1024×576@30fps, 960×540@30fps, 800×448@30fps, 640×360@30fps,640×480@30fps, 320×176P30fpsVertical screen: 1080×1920@30fps, 720×1280@30fps, 576×1024@30fps,540×960@30fps, 448×800@30fps, 480×720@30fps, 480×640@30fpsView Angle 8.8°~68°Focus Length f=4.34mm~41.66mmA V F1.85 ~F2.63Optical Zoom 10X0.1Lux(F1.8, AGC ON)MinimumIlluminationDNR 2D﹠3D DNROn/OffSuper Auto noisereductionWhite Balance Auto / Manual/ One Push/3000K/3500K/4000K/4500K/5000K/5500K/6000K/6500K/7000KFocus Auto/Manual/One Push FocusExposure Auto/ManualBLC On/OffSNR >50dBOn/OffV ertical ScreenSwitchFocus Assist On/Off10cm(W)~100cm(N)Minimum ObjectDistance2.3 Interfaces and ConnectionFigure 2.3 Wiring Diagram3. Application Instruction3.1 Remote Control3.1.1 Match Code for Wireless Remote ControlOne to One Code Matching:Press the "set" and "*" keys combined for 5 seconds, LED indicator starts flashing. Camera receive the signal and power on, LED indicator will go off if code matching successfully. The camera can be controlled by this wireless remote control only after one to one code pairing. Otherwise please clear the code matching of this remote control, or use other remote control to pair with the camera again.If one to one code matching failed, the red LED light flashes for 20 seconds and then goes off, camera will stop code match and turn on sleep mode; Press any key to wake up the camera and re-match code.Note: After code matching successfully, please select the camera address to control it.3.1.2 Keys Introduction for IR Remote Control1. Standby KeyThe camera enters standby mode if long press 3s on standby key;Long press 3s again on the standby key, the camera will self-check again and return to HOME position (If preset 0 position is set, the camera will return to preset 0 position).2. Camera SelectionSelect the camera address to control.3. Focus ControlAuto: auto focus modeManual: manual focus modeFocus + (near):Press【FOCUS +】key (V alid only inmanual focus mode)Focus - (far): Press【FOCUS -】key (V alid only inmanual focus mode)Press and hold the keys, the action of focus will keepcontinue and stop as soon as the key is released.4. Zoom ControlZOOM +: press【ZOOM +】key to zoom inZOOM - : press 【ZOOM -】key to zoom outPress and hold the keys, the action of focus will keepcontinue and stop as soon as the key is released.5. Set and Clear PresetsSet Preset: press 【SET PRESET】button, and thenpress the number key 0-9 to set preset positions.Note: 10 presets via remote control.Call Preset: Press a number key 0-9 directly to call apreset position.Clear Preset: press 【CLEAR PRESET】button, andthen press the number key 0-9 to clear preset positions.Note : press the【#】key three times continually toclear all presets.6. Direction ControlUp: pressDown: pressLeft: pressRight: pressBack to middle position: press“【HOME】”Press and hold the up/down/left/right key, the pan/tiltmovements will keep running, from slow to fast, until itruns to the endpoint; stop as soon as the key is released.7. Menu Setting【MENU】: Open / close the OSD menu【HOME】: Camera lens back to the middle position;Confirm button; Enter next menu【↑】【↓】:Choose item【←】【→】:Modify values【BLC ON/OFF】:Turn on or off the back lightcompensation3.2 Menu Introduction3.2.1 Main MenuIn normal working mode, press 【MENU】key to display the menu, using scroll arrow to point at or highlight the selected items.1) Language: Move the pointer to (Language) in the main menu, and press the [←→] key to modify language.2) Image Style: Move the pointer to (Image S tyle) in the main menu, and press the [←→] key to modify the style default / Beauty / Jewelry3) Anchor: Move the pointer to (Anchor) in the main menu, and press the [←→] key to modify the 1-4 host numbers; Image parameters can be modified manually under different host numbers, and can be saved after power failure.4) Exposure SettingMove the pointer to the (EXPOSURE) in the Main Menu, click the【HOME】key and enter into the (Exposure sub menu) as shown below,Mode: Auto, Manual, Shutter priority and Brightness priority.EV: On/Off (only available in auto mode)Compensation Level:-7~7 (only available in auto mode when EV is ON)BLC:ON/OFF for options (only available in auto mode)Dynamic Range: 1~8, closeAnti-Flicker: OFF/50Hz/60Hz for options (only available in Auto/Iris priority/Brightness priority modes) Gain limit: 0~15(only available in Auto/ Iris priority /Brightness priority mode)WDR: Off, 1~8ShutterPriority:1/25,1/30,1/50,1/60,1/90,1/100,1/120,1/180,1/250,1/350,1/500,1/1000,1/2000,1/3000,1/4000,1/ 6000, 1/10000 (only available in Manual and Shutter priority mode)Brightness: 0~23 (only available in Brightness priority mode)5) ColorMove the pointer to the (COLOR) in the Main Menu, click the【HOME】and enter the (COLOR sub menu) as follow,WB Mode: Auto, Manual, One Push, Specified color temperatureSaturation: 60%,70%,80%,90%,100%,110%,120%,130%,140%,150%,160%,170%,180%,190%,200%Red fine-tuning:-10~10 (only available in automatic mode)Blue fine-tunable:-10~10 (only available in automatic mode)RED GAIN: 0~255(only available in Manual mode)BLUE GAIN: 0~255(only available in Manual mode)A WB Sensitivity: high/middle/lowChroma: 0~146) ImageMove the pointer to the (IMAGE) in the Menu, click the【HOME】and enter into the (IMAGE sub menu) as follow,Brightness: 0~14Contrast: 0~14Sharpness: 0~15Flip-H: On/OffFlip-V: On/OffB&W Mode: color, black/whiteGamma: Default/0.45/0.50/0.55/0.63DCI: Dynamic Contrast: Off/1~8Minimum Illumination: On/Off7) Noise ReductionMove the pointer to the (NOISE REDUCTION) in the Menu, click the【HOME】and enter the (NOISE REDUCTION) as follow,2D Noise Reduction: Auto, close, 1~73D Noise Reduction: Close, 1~8Dynamic Hot Pixel: Close, 1~58) FocusMove the pointer to the (FOCUS) in the Menu, click the【HOME】and enter the (FOCUS) as follow,Focus Mode: Auto/manualFocus Assist: On/OffAF-Zone: Up/middle/downAF-Sensitivity: High/middle/low9) Video FormatMove the pointer to the (Video Format) in the Menu, click the【HOME】and enter the (Video Format) as follow,10) VersionMove the pointer to the (VERSION) in the Main Menu, click the【HOME】and enter the (VERSION) as follow,11) Restore DefaultMove the pointer to the (RESTORE DEFAULT) in the Main Menu, click the【HOME】and enter the (RESTORE DEFAULT) as follow,Restore default: YES/NO.Restore factory default only restores the image parameters under the current host number (Color style and video format cannot be restored to factory default)4. Maintenance and Troubleshooting4.1 Camera Maintenance1) Please power off the camera and disconnect the power adapter and socket, if it’s not used for an extended period of time.2) Use soft cloth or tissue to clean the camera cover.3) Wipe with a soft dry cloth when cleaning the camera lens. Wipe it gently with a mild detergent if needed. Do not use strong or corrosive detergents to avoid scratching the lens and affecting the video quality.4.2 Troubleshooting1)No video outputa. Check whether the device is connected to the USB cable and whether the power indicator is onb. Check whether the device is in standby state, long press the power button for 3s to see whether it can be turned onc. Restart the computerd. Check the video output cablee. Check whether the device is recognized, unplug the device and reconnect when it is displayed in the device manager2)Remote control not workinga. Re-code the wireless remote control to the camerab. Remote control address is set to 1 (if the machine is set back to the factory defaults, remote control addresses need to be back to 1 too)c. Check whether the battery is installed on the remote controller or lowd, Check the camera working mode is the normal operating mode5. WarrantyBZBGEAR wants to assure you peace of mind. All BZBGEAR cameras and camera-related products include our Stress-Free Three-Y ear Warranty.For complete warranty information, please visit /warranty.Forquestions,**************************************************.6. Mission StatementBZBGEAR manifests from the competitive nature of the audiovisual industry to innovate while keeping the customer in mind. A V solutions can cost a pretty penny, and new technology only adds to it. We believe everyone deserves to see, hear, and feel the adva ncements made in today’s A V world without having to break the bank. BZBGEAR is the solution for small to medium-sized applications requiring the latest professional products in A V.We live in a DIY era where resources are abundant on the internet. With that in mind, our team offers system design consultation and expert tech support seven days a week for the products in our BZBGEAR catalog. You’ll notice comparably lower prices with BZBGEAR solutions, but the quality of the products is on par with the top brands in the industry. The unparalleled support from our team is our way of showing we care for every one of our customers. Whether you’re an integrator, home theater enthusiast, or a do-it-yourselfer, BZBGEAR offers the solutions to allow you to focus on your project and not your budget.All the contents in this manual and its copyright are owned by BZBGEAR. No one is allowed to imitate, copy, or translate this manual without BZBGEAR’s permission. This manual contains no guarantee, standpoint expression or other implies in any form. Product specification and information in this manual is for reference only and subject to change without notice.All rights reserved. No reproducing is allowed without acknowledgement.。
Serafim S1手把使用说明书

Serafim S1 遊戲手把使用說明書3 4 5 6 10 17 32 35 36 39 41 45 4648 51 59 61 65 66 68 70 77 78/zh-TW/serafim-s1/user-ma nual.html**********************產品保固本產品享有一年的碩擎科技保修服務,只有在以下情況下不再納入碩擎科技的保修服務範圍:1.本產品經過非碩擎科技授權之維修、修改、規格更改、零件替換或其他非碩擎科技書面授權之行為。
2.在所有情況下,保修服務的開始日期為自實際購買之日啓一年,依據在授權經銷商或分銷商提供給您開具的發票或收據上。
※因遊戲平台官方軟體升級或原始碼變更等不可抗拒因素造成部分遊戲與本產品無法連接操作時,碩擎科技不承擔責任,保留最終解釋權。
功能鍵、SELECT、HOME鍵(LS),支援下壓數位LS鍵(RS),支援下壓數位RS鍵、LT鍵,數位RB、RT鍵3,可按下鍵+X鍵3秒切換為通用手把模式,可支、Steam Link、Real Racing 3、Fortnite、8、9等遊戲(最高支援iOS 13.3版本)3325(最高支援iOS 13.3版本)打開「藍牙與1.2.:3.4.: 按下按鍵後,可在點位置周圍使用任5.:按下鍵後,觸發兩個位置。
6.127.:8.:按下按鍵後,會從標記1的按鍵滑動2的按鍵。
9.10.:從LB、LT、RB、RT鍵中選一個當1. 2. 3.4.5.進入主畫面,勾選右方的顯示自定義視窗,左上方自定義懸浮視窗即會出現,點擊左方自定義圖示即可開始自定義功能。
自定義功能操作Android - 新遊戲設定1.開啓要做設置的遊戲,進入遊戲按鍵配置畫面;或是使用手機截圖進入相簿裡做設置。
2.點擊自定義懸浮視窗左邊自定義圖示後進入自定義畫面。
3.按下Serafim S1上需要設定的按鍵,按鍵即會出現在自定義畫面的中間。
4.將設定按鍵按住並拖曳到需要對應的位置上。
3DM-E10A用户指南
MAHRS
3DM-E10A
用 户 指 南
Version 1.31
2012 年 6 月10 日
3DM-E10A 用户指南
Version 1.31
第 1 页
3DM-E10A 用户指南
Version 1.31
1. 简介
微型航姿参考系统(MAHRS)3DM-E10A 系列是一款微型的全姿态测量传感装置,它由三轴 MEMS 陀螺、三轴 MEMS 加速度计、三轴磁阻型磁强计等三种类型的传感器构成。三轴陀螺用于 测量载体三个方向的绝对角速率,三轴加速度计用于测量载体三个方向的加速度,在系统工作中, 主要作用是感知系统的水平方向的倾斜,并用于修正陀螺在俯仰和滚动方向的漂移,三轴磁阻型磁 强计测量三维地磁强度,用于提供方向角的初始对准以及修正航向角漂移。微型航姿参考系统 3DM-E10A 系列,可提供的输出数据有:原始数据、四元数、姿态数据等。
第 6 页
3DM-E10A 用户指南
Version 1.31
电电源标准值为 DC+5.0V,数据线和电源线整合在一个接插装置中,方便使用,各引脚定义参见表 3。
6. 机械尺寸
微型航姿参考系统(MAHRS)3DM-E10A 系列尺寸如图 3 所示。
图 3 微型航姿参考系统(MAHRS)3DM-E10A 系列尺寸
第 11 页
3DM-E10A 用户指南 4字节 4字节 4字节 4字节 1字节 四元数4 Z 滚动角 (deg) 俯仰角(deg) 方位角(deg) 校验位
Version 1.31
Quat3 Roll Pitch Yaw CS
52-55 56-59 60-63 64-67 68
表 10:AHRS1 命令-完全数据输出方式,连续输出 MID=0x82,单步输出 MID=0x83 字节段 PRE BID MID LEN GyroX GyroY GyroZ AccX AccY AccZ MagX MagY MagZ 字节数 1字节 1字节 1字节 1字节 4字节 4字节 4字节 4字节 4字节 4字节 4字节 4字节 4字节 字节号 0 1 2 3 4-7 8-11 12-15 16-19 20-23 24-27 28-31 32-35 36-39 描 述
M10V2 BluOS 串流綜合擴大機 (帶前級模式) 中文使用說明書说明书

M10V2Blu O S 串流綜合擴大機(帶前級模式)中文使用說明書一、安裝使用前說明應將M10V2串流擴大機放置於平穩的桌面或音響架上。
避免將本機放置於受到陽光炙曬、靠近熱源或潮濕的地方。
確保通風充足。
請勿將本機放置於地毯之類的封閉空間內,因為那樣可能會阻礙機器的通風槽的氣流。
對機器進行任何輸出入連接前,請確保機器已關機。
本機所採用隨附之電源線為符合安規檢驗之合格電源線,並為台灣電壓110Vac 規格,請勿私自改造電源規格或使用非合格之電源線,以確保安全。
如您在一段長期時間內不打算使用本機,請將關閉本機的電源,並將插頭從 AC 電源插座上拔出。
如果有水不慎進入您的機器內部,請切斷機器的供電,然後將電源插頭從 AC 插座上拔出。
機器必須經過合格的維修技術人員檢查方可被再次使用。
請勿擅自打開機器的機殼,本機器內沒有可供用戶自行維修的部件。
請使用柔軟的乾布清潔機器及喇叭表面。
在必要的情況下,也可以用略蘸肥皂水的布進行清潔。
請勿使用含苯的溶液或揮發性的溶劑清潔本機。
二、包裝內容物‧主機本體‧電源線 110V/ 220V‧BluOS 串流操作遙控器 (附 3V電池x2)‧空間校正系統 (收音麥克風/USB轉接線)‧資料隨身碟‧主機收納袋‧快速設定指南若以上包裝內容物有缺失,請聯絡您購買的經銷商或當地代理商。
為日後轉換環境使用或運輸安全用途,建議您保留包裝盒、主機收納袋與盒內所有配件以供日後移動使用。
三、機器安裝說明1.請取出內附的電源線,安裝於機背插座及插頭接上電源,頂部NAD 燈號亮紅。
2.接上各類預連接的訊源的訊號線、網路線(或WI-FI 連線)及喇叭線。
3.按壓機背電源開關(STANDBY)不放,直至頂部NAD 燈號閃爍變為白燈,正式開機運作。
4.下載安裝NAD 『BluOS Controller』APP 至手機、平板或電腦。
(BluOS APP 為免費下載,支援APPLE iOS 及Google Android 手機、平板及MAC、Windows 電腦)備註: 上述所有智慧裝置及電腦作業平台的BluOS Controller APP 的畫面皆配合各裝置及平台優化設計,畫面可能略有不同。
3dmxs功能

A——角度捕捉开关 B——切换到底视图C——切换到摄像机视图 D——封闭视窗E——切换到轨迹视图 F——切换到前视图G——切换到网格视图 H——显示通过名称选择对话框I——交互式平移 J——选择框显示切换K——切换到背视图 L——切换到左视图M——材质编辑对话框 N——动画模式开关O——自适应退化开关 P——切换到透视用户视图Q——显示选定物体三角形数目 R——切换到右视图S——捕捉开关 T——切换到顶视图U——切换到等角用户视图 V——旋转场景W——最大化视窗开关 X——坐标轴高亮显示开关Y——工具样界面转换 Z——缩放模式[——交互式移近 ]——交互式移远/——播放动画 F1——帮助文件F3——线框与光滑高亮显示切换 F4——DEGED FACES 显示切换F5——约束到X轴方向 F6——约束到Y轴方向F7——约束到Z轴方向 F8——约束轴面循环F9——快速渲染 F10——渲染对话框F11——MAX脚本程序编辑 F12——键盘输入变换一、主用户界面快捷键主用户界面命令快捷键Numeric Expression Evaluator(数字表达式求值)注:在用快捷键激活此命令之前,光标一定要在数字输入框中,这样才可以调出数字表达式求值窗口,且此快捷键不可以自定义。
CTRL+NAdaptive Degradation Toggle(显示自适应标记开关) O(字母)Lock User Interface Toggle(锁定用户界面开关) ALT+0(数字)Align(对齐) ALT+ANormal Align(法线对齐) ALT+NPlace Highlight(放置高光) CTRL+HSpacing Tool(间距工具) SHIFT+IAngle Snap Toggle(角度捕捉开关) ASnap Percent Toggle(百分比捕捉开关) SHIFT+CTRL+PSnap Toggle(捕捉开关) SSnaps Cycle(循环捕捉) ALT+SAnimate Mode ToggleAuto Key Toggle(自动添加关键帧动画模式开关) NGo to End Frame(到结束帧) ENDGo to Start Frame(到开始帧) HOMEBackup Time One Unit(向前移动一帧),Forward Time One Unit(向后移动一帧) .Set Key Mode(设置关键帧模式) 'Set Key(设置关键帧) KPlay Animation(播放动画) /Sound Toggle(声音开关) \Background Lock Toggle(背景锁定开关) ALT+CTRL+BBottom View(底视图) BCamera View(摄影机视图) CFront View(前视图) FLeft View(左视图) LDisable Viewport(非活动视图) DIsometric User View(用户视图) UPerspective User View(透视图) PTop View(顶视图) TSpot/Directional Light View(聚光灯/平行光灯视图) SHIFT+4 Delete Objects(删除物体) DELETEOpen File(打开文件) CTRL+O(字母)New Scene(新建场景) CTRL+NSave File(存储文件) CTRL+SHold(暂存) ALT+CTRL+HFetch(恢复至最后一次暂存状态) ALT+CTRL+FExpert Mode(专家模式) CTRL+XUndo Scene Operation(撤消场景操作) CTRL+ZRedo Scene Operation(重做场景操作) CTRL+YSmart Select(选择模式) Q注:当选择按钮被激活后再按Q键为循环选择Fence Selection Region (围栏式选择区域)方式。
USB Mass Storage Support用户指南说明书
USB Mass Storage Support ..............................................................................................Section 1 Introduction...........................................................................................1-11.References................................................................................................1-12.Abbreviations............................................................................................1-13.Supported Controllers...............................................................................1-14.Introduction...............................................................................................1-15.Operating Systems....................................................................................1-16.LUN support..............................................................................................1-27.Minimum size under windows...................................................................1-2Section 2Memory Targets....................................................................................2-31.Memories Supported.................................................................................2-32.Dataflash card...........................................................................................2-3Section 3Frequently Asked Questions.................................................................3-51.How to use my USB Mass Storage Device under Windows 98SE ?........3-52.How can I disconnect my Mass Storage Device ?....................................3-53.I can't see the "Safe Disconnect" icon in the System Tray !.....................3-54.My device is enumerated but I can't see it under Linux !..........................3-65.Procedure for support 40 Invalid block per 1024 block.............................3-6Section 1Introduction1. References Universal Serial Bus Specification, revision2.0Universal Serial Bus Class Definition for Communication Devices, version 1.1USB Mass Storage Overview, revision 1.2USB Mass Storage Bulk Only, revision 1.02. Abbreviations USB: Universal Serial BusVID: Vendor IdentifierPID: Product IdentifierLUN: Logical Unit Number3. SupportedControllersAT89C5130/31A & AT8xC5122D4. Introduction The aim of this document is to support the developer for Mass Storage Application.5. OperatingSystems The following OSs support the USB Mass Storage Device class:•Linux: USB mass storage is available in kernel 2.4 or later •USB mass storage is available in Mac OS 9/X or later •Windows XP: native driver•Windows 2000: native driver•Windows Me: native driver•Windows 98SE: Vendor specific driver requiredIntroductionsupport In order to support multiple LUN, please verify that you have correctly intalled the latest 6. LUNservice pack of your OS. Multiple LUN will works on:•Windows XP SP1 or more•Windows 2000 SP4 or moresize7. MinimumThe minimum number of sectors to declare in order to be recognized by windows is 8.under windowsSection 2Memory Targets1. MemoriesSupported2. Dataflash cardDo not remove card during read/write action Because of the low write speed in dataflash, the Operating System can report an error when writing a file, but the file is correctly written. In case of failure, format the data flash using the Operating System tools.3. DataflashBecause of the low write speed in dataflash, the Operating System can report an error when writing a file, but the file is correctly written. In case of failure, format the data flash using the Operating System tools.SupplierRefTypeManuf, Dev Code (hex)Capacity (MB)Supported bydriver Samsung MT29F2G08AACWG Nand Flash 2C, DA 2561x2KB,2x2KB Samsung K9K1G08U0A Nand Flash EC, 79, xx, C01281x512B Atmel AT45DB642DataFlash -81x512B Atmel AT45DB321DataFlash -41x512BAtmelAT45DB002 AT45DB004 AT45DB008DataFlash Card-Section 3 Frequently Asked Questions1.How to use myUSB MassStorage Deviceunder Windows98SE ?There is no native driver to support USB Mass Storage in Windows 98SE. Atmel pro-vides drivers derivated from the SDK/DDK Microsoft example. For ATMEL products, we deliver this driver. The mass_storage_driver_for_Win98SE.zip file is in \Atmel\c5131-mass-storage-complete-x_x_x\doc folder.This driver is composed of 3 files:•atusbms.inf file•atusbms.sys file•atusbms.pdr fileThe atusbms.sys and atusbms.pdr files are the system drivers for Windows 98SE.The .inf file describes the driver to load for your application. The application is recog-nized using the Vendor ID (VID) and Product ID (PID). Because you will use your own VID/PID in the final application, you have to modify the .inf file with the corresponding VID/PID. After driver installation :atusbms.inf is located in C:\windows\inf\atusbms.sys is located in c:\windows\system32\drivers\atusbpdr.pdr is located in c:\windows\system\iosubsys\2. How can Idisconnect myMass StorageDevice ?Under Windows, each Mass Storage device appears in the System Tray. Click on the corresponding icon in order to safely disconnect your USB device.3. I can't see the"SafeDisconnect" iconin the SystemTray !There are 2 conditions for that:•be under Windows 2000 Professional, server•use a composite Mass Storage device (mass storage + mouse for example)In such situation, no icon will appear in the System Tray. It's a bug from Microsoft. Please refers to this page:/default.aspx?scid=kb;en-us;841880&Product=win2000Frequently Asked QuestionsTo solve this problem, use the Hotfix from Microsoft.4.My device isenumerated but I can't see it under Linux !Check with the USBview tool that your device is correctly enumerated.The Linux kernel requires a Master Boot Record (MBR) and a Partition Boot Record (PBR). In root mode ("su" command), launch the fdisk tool for your device "fdisk /dev/sdx" (x is the number of your device), erase all existing partitions, and create a new partition. By default, this partition will use a Linux file system. You can change it to a FAT12 or FAT16 in order to be recognized by every OS.$ su Password:# fdisk /dev/sdx Command : dnumber of the partition (1-4) : 1Command : dnumber of the partition (1-4) : 2Command : dnumber of the partition (1-4) : 3Command : dnumber of the partition (1-4) : 4Command : n e Extendedp Primary partition pFirst cylinder ():Last cylinder():Command: tNumber of the partition: 1Code Hex : 6Command: w5. Procedure for support 40 Invalid block per1024 block1) You must modify the number of free blocks in the file "nf_drv.h" :/* Number maximum of free block per zone */ #define NB_FREE_MAX (24+20)This variable increases the size of XDATA, and this one must be less than 2048 bytes.Change the MAX_FILE_FRAGMENT_NUMBER variable in "nf_drv.h" to reduce the xdata size.#define MAX_FILE_FRAGMENT_NUMBER ((Byte)140) /* The maximum number authorized2) if the Nand Flash has been used with a firmware generated with other NB_FREE_MAX value, you must reinitialize the NF : - modify in "config.h" the option format at TRUE :#define NF_FULL_CHIP_ERASE TRUEFrequently Asked Questions- include the new value of NB_FREE_MAX- compile, load and start the firmware- format the NF via the player menuAt this step the NF correct, and you can change this option to FALSE.3) You must format the NFDisclaimer: The information in this document is provided in connection with Atmel products. No license, express or implied, by estoppel or otherwise,to any intellectual property right is granted by this document or in connection with the sale of Atmel products. EXCEPT AS SET FORTH IN ATMEL’S TERMS AND CONDI-TIONS OF SALE LOCATED ON ATMEL’S WEB SITE, ATMEL ASSUMES NO LIABILITY WHATSOEVER AND DISCLAIMS ANY EXPRESS, IMPLIED OR STATUTORY WARRANTY RELATING TO ITS PRODUCTS INCLUDING, BUT NOT LIMITED TO, THE IMPLIED WARRANTY OF MERCHANTABILITY, FITNESS FOR A PARTICULAR PURPOSE, OR NON-INFRINGEMENT. IN NO EVENT SHALL ATMEL BE LIABLE FOR ANY DIRECT, INDIRECT, CONSEQUENTIAL, PUNITIVE, SPECIAL OR INCIDEN-TAL DAMAGES (INCLUDING, WITHOUT LIMITATION, DAMAGES FOR LOSS OF PROFITS, BUSINESS INTERRUPTION, OR LOSS OF INFORMATION) ARISING OUT OF THE USE OR INABILITY TO USE THIS DOCUMENT, EVEN IF ATMEL HAS BEEN ADVISED OF THE POSSIBILITY OF SUCH DAMAGES. Atmel makes no representations or warranties with respect to the accuracy or completeness of the contents of this document and reserves the right to make changes to specifications and product descriptions at any time without notice. Atmel does not make any commitment to update the information contained herein. Unless specifically providedot-herwise, Atmel products are not suitable for, and shall not be used in, automotive applications. Atmel’sAtmel’s products are not intended, authorized, or warranted for use as components in applications intended to support or sustain life.Atmel CorporationAtmel Operations2325 Orchard Parkway San Jose, CA 95131Tel: 1(408) 441-0311Fax: 1(408) 487-2600Regional HeadquartersEuropeAtmel SarlRoute des Arsenaux 41Case Postale 80CH-1705 Fribourg SwitzerlandTel: (41) 26-426-5555Fax: (41) 26-426-5500AsiaRoom 1219Chinachem Golden Plaza 77 Mody Road Tsimshatsui East Kowloon Hong KongTel: (852) 2721-9778Fax: (852) 2722-1369Japan9F, Tonetsu Shinkawa Bldg.1-24-8 ShinkawaChuo-ku, Tokyo 104-0033JapanTel: (81) 3-3523-3551Fax: (81) 3-3523-7581Memory2325 Orchard Parkway San Jose, CA 95131Tel: 1(408) 441-0311Fax: 1(408) 436-4314Microcontrollers2325 Orchard Parkway San Jose, CA 95131Tel: 1(408) 441-0311Fax: 1(408) 436-4314La Chantrerie BP 7060244306 Nantes Cedex 3, France Tel: (33) 2-40-18-18-18Fax: (33) 2-40-18-19-60ASIC/ASSP/Smart CardsZone Industrielle13106 Rousset Cedex, France Tel: (33) 4-42-53-60-00Fax: (33) 4-42-53-60-011150 East Cheyenne Mtn. Blvd.Colorado Springs, CO 80906Tel: 1(719) 576-3300Fax: 1(719) 540-1759Scottish Enterprise Technology Park Maxwell BuildingEast Kilbride G75 0QR, Scotland Tel: (44) 1355-803-000Fax: (44) 1355-242-743RF/AutomotiveTheresienstrasse 2Postfach 353574025 Heilbronn, Germany Tel: (49) 71-31-67-0Fax: (49) 71-31-67-23401150 East Cheyenne Mtn. Blvd.Colorado Springs, CO 80906Tel: 1(719) 576-3300Fax: 1(719) 540-1759Biometrics/Imaging/Hi-Rel MPU/High Speed Converters/RF DatacomAvenue de Rochepleine BP 12338521 Saint-Egreve Cedex, France Tel: (33) 4-76-58-30-00Fax: (33) 4-76-58-34-80e-mail********************Web Site© Atmel Corporation 2005. All rights reserved. Atmel ®, logo and combinations thereof, are registered trademarks, and Everywhere You Are ® are the trademarks of Atmel Corporation or its subsidiaries. Other terms and product names may be trademarks of others.。
萤石 全屋网络 智能家居网关 CS-W3X-V100-WD1800GM 使用说明书

添加至“萤石云视频”装箱清单用户指南(x1)设备(x1)电源适配器(x1)外观介绍长按7秒,设备重启并恢复出厂设置;短按一下,可以开启Mesh组网,或者对萤石摄像机进行一键配网,参见“Mesh组网”/“一键配网”章节。
RESET键*电源开关绿色闪烁:设备启动中(设备上电启动时,指示灯先绿色常亮几秒后绿色闪烁)蓝色常亮:未连网绿色常亮:正常工作(已连网)蓝色闪烁:处于萤石产品一键配网状态,或者MESH组网状态蓝色绿色交替闪烁:恢复出厂设置中指示灯熄灭:设备未上电或用户手动关闭灯光LED指示灯*背面RESET键*WAN口LED指示灯*1连接线路将手机连接上设备的网络(默认无线网络名称EZVIZ_XXXXX,默认无密码),打开浏览器,在地址栏输入 ,按“Enter”键,进入设备配置界面。
首次登录后,请您根据需要按配置向导进行操作:配置设备管理密码、Wi-Fi名称和密码等。
首次使用请先进行配置,您可以打开计算机或者手机的浏览器配置设备参数,本手册以手机浏览器为例。
122配置管理注册并登录“萤石云视频”客户端,选择添加设备,进入扫描二维码界面。
21扫描下面的二维码,下载并安装。
手机扫描二维码下载“萤石云视频”客户端下载“萤石云视频”正面3电源接口LAN口底部扫描二维码将设备水平放置在桌面上。
用网线(需自备)连接设备的WAN口和您的网络出口。
使用原装配套的电源适配器将设备连接电源,设备自动开启。
在设备详情页点击 按钮,进入设置页,可以查看设备信息、删除设备等。
设置页设备添加到“萤石云视频”客户端后,用户可在设备详情页查看设备的控制面板、终端管理、工具箱。
或者点击 图标,进入设置页。
交互界面会有不定时更新,具体以实际界面为准交互界面会有不定时更新,具体以实际界面为准设备详情页控制面板本用户指南中所有图片仅供参考,一切请以实物为准。
对设备进行路由管理(添加路由器进行Mesh组网等)、网络设置等、萤石摄像机快速配网等操作。
SVX无线系统用户指南说明书

SVX Wireless SystemOnline user guide for SVX wireless system. Version: 1.0 (2022-A)Table of ContentsSVX Wireless System3安全事項3快速設定3 Shure SVX 無線系統4接收機4發射機 5系統組件6所有系統 6手持式發射機 6腰包式發射機 6電源6連接到音響系統 7頻道 7腰包增益 7 RF 水平 7靜噪 7電池電量過低指示燈 7顏色標識環 7獲得良好音質7正確放置麥克風 8佩戴頭戴式麥克風 8腰包式傳送器的佩戴 8可提高系統性能的無線使用提示9故障排除9選配附件10備件10 10頻率範圍10澳大利亞無線警告11規格 11SVXWireless System安全事項根據危險程度和損壞嚴重性的不同,使用“警告”和“小心”文字對未正確使用可能導致的後果做出標識。
警告:如果沒有遵循這些警告事項,在操作不正確的情況下可能會導致嚴重的人身傷亡事故。
小心:如果沒有遵循這些警告事項,在操作不正確的情況下可能會導致常見的人身傷害或財產損失。
警告如果有水或其他異物進入設備內部,可能會導致起火或觸電事故。
不要嘗試改裝本產品。
這樣做會導致人身傷害和/或產品故障。
小心不要拆開或改裝本設備,這樣可能會導致故障。
不要用力過大,不要拉扯線纜,否則會損壞線纜。
讓話筒保持乾燥,並避免暴露在極高溫度和濕度環境下。
快速設定Shure SVX 無線系統恭喜您購買了舒爾的 SVX 無線系統。
舒爾專業音響產品能夠提供出色的音響質量,在舞臺上經久耐用,讓您的演出輕鬆自如。
SVX 無線系統可與領夾式、手持式或頭戴式話筒一起使用,適用於演示、卡拉 OK 表演、增氧運動/健身教練或其它需要無線移動功能場合。
接收機KCX4KCX88①電源指示燈②音訊指示燈③無線電頻率密度指示燈④平衡輸出(XLR 接頭)⑤非平衡輸出(6.35 毫米接頭)⑥音訊輸出電平(線路/話筒)切換製⑦頻道選擇旋鈕⑧靜噪旋鈕⑨電源適配器輸入⑩天線發射機①電源按鈕••••••••••② 頻道選擇旋鈕③ 音訊輸入電平(線路/話筒)切換開關④ 電池艙⑤ 發射機增益旋鈕⑥ 皮帶夾⑦ 話筒輸入(CVL 領夾式或 PGA31 頭戴式)⑧ 無線電射頻 (RF) 電平切換開關⑨ 天線⑩ 顏色標識環⑪ 防滾環⑫ 電源 LED 指示燈系統組件所有系統SVX 接收機PS24 電源部件頻道選擇工具2 枚 AA 電池手持式發射機SVX2 手持式話筒發射機話筒底座轉接頭腰包式發射機SVX1 腰包式發射機話筒PG185 領夾式話筒或PG30 頭戴式話筒電源插上電源適配器,將接收機電源打開。
锐捷命令行操作手册

4.7 DNS...................................................................................................................................... 20
4.7.1 DNS 简介.......................................................................20
星网锐捷网络有限公司
第 3/42 页
详细信息,请参考随机附带的光盘中的信息。详细说明和配置以随机附带的光盘为准,如果 因为时间而有改变,恕不另行通知。
读者对象 本书适合下列人员阅读: 网络工程师 技术推广人员 网络管理员
夏普打印机使用说明书
纸张 ................................................................................................................. 14 加载纸盒 .......................................................................................................... 15 手送(包括特殊纸张)..................................................................................... 17 更改纸盒的纸张尺寸设置 ................................................................................. 19
5 软件安装
AR-158F 的软件 .............................................................................................. 36 安装之前 .......................................................................................................... 37 软件安装 .......................................................................................................... 38 设置 Button Manager....................................................................................... 51 将机器连接到您的计算机 ................................................................................. 55
S10实操教程(1)
1.先打开后盖
2.后打开放水阀
注意事项:
1.仪器要远距离移动,一定要把水放干。
2.更多的注意事项请参照产品说明书。
屏幕会显示进入操作界面
1.保险丝位置作用:仪器屏幕不亮或者电源开关不亮,检查一下保险丝是否有烧断。(换保险教程)
测试杯使用和仪器开机状态
1.
1.放水放置刚刚好达到0.8水线下。
2.热力塑启动时候,在不做客户或测试杯的时候不能空打,否则很容易损坏探头。
操作界面说明
复位键
操作完之后更换探头,应该点击屏幕的复位键,让手柄的电机恢复到中点(你会听到2声,每隔着3秒钟,就会听到1声音嗒的声音),这样证明电机回到中心点。这样做仪器的寿命长。
S10实操教程
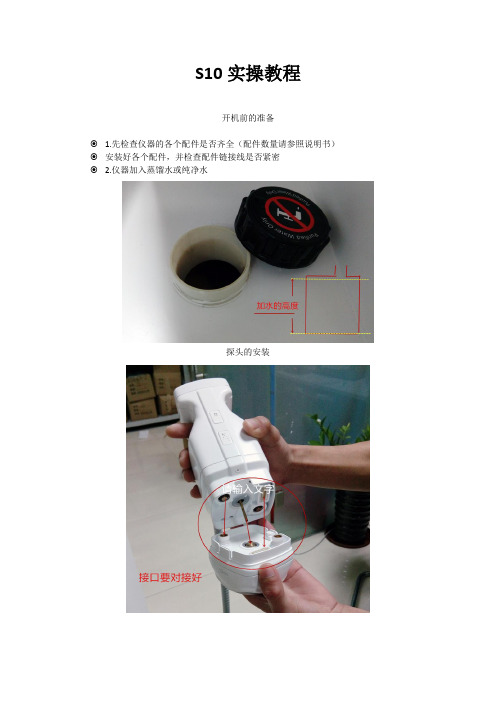
开机前的准备
1.先检查仪器的各个配件是否齐全(配件数量请参照说明书)
安装好各个配件,并检查配件链接线是否紧密
2.仪器加入蒸馏水或纯净水
探头的安装
屏幕角度调整
ห้องสมุดไป่ตู้探头的按键说明
启动/暂停开关作用:仪器启动打点工作时,可以暂停调整位置或手柄姿势或能量的大少调节
喷水开关作用:
开机
按下仪器背后的电源按键,按键会出现红色灯
米洛斯徽标系统2021年1季XProtect屏幕录制器管理员用户手册说明书
2021ContentsCopyright,trademarks,and disclaimer3 Overview4 Introduction4 How XProtect Screen Recorder works4 Licensing5 Licensing5 Installation6 Installing and configuring on computer6 Set password7 Set port number7 Set MAC address8 Configuration10 Configuring after installing on computer10 Change password10 Change port number10 Change MAC address10 Installing on recording server11 Set frames per second/live frame rate11 Set quality11 Set capture mode11 Optimization13 Security13 Maintenance14 Uninstalling from computer14 Troubleshooting15 Troubleshooting15Copyright,trademarks,and disclaimerCopyright©2021Milestone Systems A/STrademarksXProtect is a registered trademark of Milestone Systems A/S.Microsoft and Windows are registered trademarks of Microsoft Corporation.App Store is a service mark of Apple Inc.Android is a trademark of Google Inc.All other trademarks mentioned in this document are trademarks of their respective owners.DisclaimerThis text is intended for general information purposes only,and due care has been taken in its preparation. Any risk arising from the use of this information rests with the recipient,and nothing herein should be construed as constituting any kind of warranty.Milestone Systems A/S reserves the right to make adjustments without prior notification.All names of people and organizations used in the examples in this text are fictitious.Any resemblance to any actual organization or person,living or dead,is purely coincidental and unintended.This product may make use of third-party software for which specific terms and conditions may apply.When that is the case,you can find more information in the file3rd_party_software_terms_and_conditions.txt located in your Milestone system installation folder.OverviewIntroductionThis manual describes the Milestone XProtect Screen Recorder feature.It allows a Windows computer to act as an IP video camera,sending the contents of its desktop to the recording server it is connected to.The XProtect Screen Recorder feature is a small application to be installed on one or more Windows computers where you want to record desktop contents,and a camera driver included in XProtect Device Pack6.0and later versions. XProtect Screen Recorder works with all XProtect products on the following Windows platforms in both32-and 64-bit versions:l Client operating systems:Microsoft Windows8.1or newerl Server operating systems:Microsoft Windows Server2008R2or newerIn this document,when the term"recording server"is used,it refers to XProtect recording servers.How XProtect Screen Recorder worksOnce installed,XProtect Screen Recorder is automatically controlled from the startup menu of the computer where it is installed and runs in the context of the user logged into this computer.This means that XProtect Screen Recorder automatically and invisibly starts up every time the user logs in to the computer and closes down every time the user closes down.If online user-switching is done via Window's Fast User Switching feature,the XProtect Screen Recorder will continue to record in the context of the new user,however any other type of user-switching/-logging in or out will result in discontinuation of the feature.Read more about switching users without logging off onhttps:///windows-10-enable-or-disable-fast-user-switching/.This is possible because it is a service running in the background,capturing the computer’s screen at a set frame rate.It is also this service that provides the interface that your XProtect surveillance system can connect to and retrieve images from similarly as any other camera.LicensingLicensingWhen you add a screen recorder device in Management Client,you need a device license,just like with any other device.However,downloading and installing the XProtect Screen Recorder software is free of charge and you can install it as many times as required.XProtect Screen Recorder can and may only be used with Milestone software.InstallationInstalling and configuring on computerBefore you can start using the XProtect Screen Recorder feature,you must first download and install it on one or more Windows computer(s)where you want to receive desktop images.The application part of XProtect Screen Recorder consists of a Windows service and a desktop capture process. When installing the feature,you must have administrator rights to the computer you are using.Uninstalling or stopping the Windows service also requires administrator rights.Locate the file(https:///downloads/)named MilestoneXProtectScreenRecorderInstaller.exe and follow the download and installation procedure.When complete,the computer will work as an IP camera.From Management Client,you can add the XProtect Screen Recorder device,similar to adding a camera,to connect to it.Towards the end of the installation,the Milestone XProtect Screen Recorder-Administrator window appears. Address the configuration parameters below and click OK to save and finish the installation process.Set passwordIt is important that only the relevant recording server connects to and request video from a computer with XProtect Screen Recorder installed.You do this by entering a password of your choice in the text fields displayed in the illustration below.Milestone recommends that you fill in the password fields.In addition,there is no way to be reminded of the password,so it is important to remember the password.You must enter the password in Management Client on the recording server side.Set port numberFor the relevant recording server to connect to a computer with XProtect Screen Recorder installed,you must specify a Transmission Control Protocol(TCP)port.TCP ports are identified by their number.The default number is52111.If this port is already in use by another program,change it.Make sure that the selected port is open on your firewall so the recording server canconnect to it.Set MAC addressFor licensing purposes,you must also select a MAC address.You can choose between all MAC addresses available on the computer with XProtect Screen Recorder installed.1.Make a selection in the MAC address available list.2.Click Set.3.The selected MAC address is displayed in the MAC address used field.When you configure the screen recorder device in Management Client,you must provide a license key that matches the selected MAC address.ConfigurationConfiguring after installing on computerAfter installing,it possible to change all XProtect Screen Recorder configurations.This is done from the Milestone XProtect Screen Recorder-Administrator’s window which can be reached in the following way:1.Open Windows’Start menu.2.Click Milestone XProtect Screen Recorder Administrator.3.Confirm that the XProtect Screen Recorder is allowed to make changes to your hard drive.Next,theXProtect Screen Recorder-Administrator’s window will open.4.From the left-hand menu of the window,click Password,Port Number or MAC Address(depending onwhat you want to do).Change password1.In the Administrator’s window,on the Password tab,move focus to either text field to clear them both.2.Next,click OK to delete the old password(you will be presented with a warning).3.Enter a new password and click OK.This saves changes and restarts the XProtect Screen Recorder.4.Close the window.Change port number1.In the Administrator’s window,go to the Port Number tab.2.Fill in the port number(see Set port number on page7).3.When done,click OK.This saves changes and restarts the XProtect Screen Recorder.4.Close the window.Change MAC addressMAC addresses relate to hardware.If you change your network adapter,the selected MAC address may no longer be available.You must then select another valid address.This also requires that you enter a new license on the recording server side.1.In the Administrator’s window,go to the MAC Address tab.2.Set the MAC addresses(see Set MAC address on page8).3.When done,click OK.This saves changes and restarts the XProtect Screen Recorder.4.Close the window.Installing on recording serverIn Management Client,you must add a screen recorder device that connects to the XProtect Screen Recorder service.It is added and configured like any other IP video camera(see relevant documentation of your surveillance system for details on how to add and configure a camera).When you add a screen recorder device,the user name must be videoos and the device type Screen Recorder.A screen recorder device has the following configurable parameters:l Frames per second/live frame ratel Qualityl Capture modeWhen adding a screen recorder device,you must provide the IP address of the device.Inthis case,the device is a computer.But when adding a device of the Screen Recorder type,you may be in a situation where the computer does not have a permanent IP address.Inthat case,you can use the Domain Name System(DNS)name of the computer.Set frames per second/live frame rateFrames per second in XProtect Corporate/Live frame rate in other Milestone surveillance products.A low frame rate is recommended because high frame rates may cause heavy CPU usage on the computer with XProtect Screen Recorder installed.For this reason,the XProtect Screen Recorder feature never yields more than4frames per second.Two frames per second offers a nice impression of screen activity and causesapproximately5-8%extra CPU usage on an average Windows7computer anno2010.Thus,2or3frames per second is the recommended daily setting.Set qualityVideo frames are sent to the recording server as a series of JPEGs.It is possible to lower network and storage consumption by configuring a lower quality.However,this will result in a more blurred image.The effective valid range is0(poorest quality)to100(best quality).Default is75,which reduces the amount of data nicely without reducing the visual quality too much.However,the JPEG algorithm is not optimized for computer images with many rectangles.So even with a high quality you will still observe glitches around straight lines.Set capture modeWith regards to capture mode,there is a choice of:l Primary screen only:the primary screen onlyl All screens(if there is more than one screen):a mosaic of all screens setup for the computer in question l Screen1,Screen2,etc.(if there is more than one screen):The selected screen onlyOptimizationSecurityAs mentioned earlier,XProtect Screen Recorder’s recording process is controlled from the computer startup menu and runs in the context of the logged in user.This means that the user can use the Windows Task Manager to shut down the process.To prevent that,Windows must be configured so that the user has no access to Windows Task Manager or other programs with similar capabilities.Disabling XProtect Screen Recorder results in the device connecting to the XProtect Screen Recorder service showing a red screen with a cross over it.The TCP based protocol used between the recording server and the computer withXProtect Screen Recorder installed utilizes Digest Authentication(RFC7616)with SHA256as a hashing algorithm.The risk of other products intercepting a desktop is thereforeminimal,but you are urged to define a password in the Milestone XProtect ScreenRecorder-Administrator’s window.MaintenanceUninstalling from computerThe following procedure describes standard system component removal in recentWindows versions;the procedure may be slightly different in older Windows versions.1.In Windows'Start menu,select Control Panel,and:l If using Category view,find the Programs category,and click Uninstall a programl If using Small icons or Large icons view,select Programs and Features2.In the list of currently installed programs,right-click the required Milestone program or service.3.Select Uninstall if you wish to uninstall all components.Select Change if you only wish to uninstall somecomponents.4.Follow the removal instructions.TroubleshootingTroubleshootingA problem which may occur with XProtect Screen Recorder is that the recording server and the computer with XProtect Screen Recorder installed cannot connect.These are probable causes:l The configured TCP port is not open on the firewall that the XProtect Screen Recorder is installed on.Or if communication runs through a router,the router may also have a firewall that causes problemsl The IP address defined on the recording server is different from the IP address on the computer withXProtect Screen Recorder installedl The IP port defined on the recording server is different from the one configured on the computer with XProtect Screen Recorder installedl The password defined on the recording server is different from the one configured on the computer with XProtect Screen Recorder installedl The Device Pack and XProtect Screen Recorder versions are incompatibleXProtect2019R3includes Device Pack10.5.Connection will fail if you are runningDevice Pack10.4(or earlier)and using the XProtect Screen Recorder version2019R3(or later).To investigate other problem scenarios,you can enable the tracing of relevant desktop recordings:1.In Windows Explorer,in the directory:%PROGRAMFILES%\Milestone\XProtect Screen Recorder,locate thefile:ScreenRecorderService.exe.config.ing an editor,for example,Microsoft©Notepad,change the value of the attribute"Log"to"yes"asillustrated below:<?xml version="1.0"?><configuration><startup><supportedRuntime version="v2.0.50727"/></startup><appSettings><add key="Log"value="yes"/></appSettings></configuration>4.Save the file under the same name and in the same location.5.Start Milestone XProtect Screen Recorder Administrator(see Configuring after installing on computer onpage10).6.Click OK to restart XProtect Screen Recorder.Logging is now enabled.7.In the AllUsers ProgramData folder,in the subdirectory:Milestone\XProtect Screen Recorder,two logfiles are now available:Servicelog.txt and Desktoplog.txt.l Servicelog.txt is a log of all network traffic and communication between the recording server andthe computer with XProtect Screen Recorder installedl Desktoplog.txt is a log of the process running on the computer with XProtect Screen Recorderinstalled,capturing desktop images and sending them to the Windows service as JPEG images 8.To avoid that the two log files grow extensively,it is important to reset the"Log"attribute to"no"whendone.See step2.9.Restart Milestone XProtect Screen Recorder Administrator(see Configuring after installing on computeron page10).open platform video management software;technology that helps assets and increase business estone Systemscollaboration and innovation in the development and use of scalable solutions that are proven in more than 150,000sitesis a stand-alone company in the Canon Group.For more *************************。
Xbox 360 Kinect 游戏手册说明书
ᏨݟЫٙ൷ᕎ
Ы̀१ίᕎชᏐኜЇˇ 1.8 ʮˉٙ൷ᕎdʑঐᐏ௰Գٙ ༷Ꮥ᜕f
1.8 ʮˉ
3 ʮˉ
՟ Kinect Դ͜Ⴍ
ν؈ࠅ՟Դ͜Ⴍdሗਗ਼Ы̸ٙ˓ФՑ̸ɨ˙઼ ਗ Kinect ʝਗʕː (ν؈Ы͍ίආБ༷Ꮥdۆ ̀ί [˴̌ঐ ]ڌ፯՟ Kinect ʝਗʕː)f
ක༷Ꮥ
ண֛ Kinect ༷Ꮥ٤ග
ண֛༷Ꮥ٤ගࣛdࠅাИ௰ࠠࠅٙԫj • ਗ਼ KinectTM ชᏐኜ׳ί̙˸ՑЫٙή˙f • ʔࠅ१ίᕎชᏐኜ˄˄אڐჃٙή˙f • ٤༷Ꮥ٤ගʫٙהϞ௧ࡆձՉ˼ღᖟيf Ы̙˸ਗ਼ Kinect ชᏐኜ׳ίཥൖɨ˙͍אɪ˙d׳݊אίቦ ࣲڐɿݖאɿٙᗙᇝfν؈׳ίཥൖዚɪࠦdሗਕ̀͜Ѱɿ ѰИd˸еદໝfሗাИdவԬ༷Ꮥึ͜ՑܘεਗЪd˸ה ɓ֛ࠅո֛λชᏐኜf
警告
在您開始玩遊戲之前,請詳讀 Xbox 360® 主機說明、Kinect 感應器手冊、以及其 他任何周邊裝置手冊上的重要安全與健康須知。請妥善保留所有手冊,以供日後參 考之用。如需替換硬體手冊,請前往 /support 或致電 Xbox 客戶支 援部門。
如需其他安全資訊,請見封底內頁。
৾व
ν؈ࠅක༷Ꮥdਗ਼Ыٙ˓Ф̈Ըᜫ̴ᘔί ٤ʕd৾݊אवίፃ࿇ɪٙ [ක] ܲඐf ܲඐմఖٙͣਸ਼ਸ਼෬တࣛdఱ̙˸ක ઞᎈəl ৾व˓ැɰ̙˸ᜫЫ፯՟ፃ࿇ɪٙՉ˼ ධͦf
౨ɓɨ
౨ɓɨ˓ැ̙˸ᜫЫજਗධͦdԷνҬర̙ ˸ձЫϓމλʾٙʃ௧f
8
ˣଢʃᕄ
ˣଢʃᕄ݊Ыגɿմఖٙɓɽ˪ণήd݊ʃ௧ࡁ͛ݺձِߘٙή ˙fՑԟԬʃ܊ək ල˝୵މڗӊ৳ʃ௧ܔɓගʃ܊dҎૐ ̙˸ձӬࡁһፋڐfШ݊୵ڗɪϣᕎක̘ࣚБܝdʃ௧ࡁܘซׂ ˼dӚεɮӬࡁఱɓ৳ɓ৳ยΫ̮əf
SX9Quick摄像头用户手册说明书

M A N U A L D E U S U A R I O CÁM A R A D E S E G U R I D A DS X9P2P00009QuickManualManual de usuario x 1Base fijadora ×1Kit de accesorios ×1Lista de contenidoLuego de abrir la caja del empaque, chequea quecontenga todos los accesorios descritos a continuaciónCámara x 1Cable USB/Micro USB x 1Adaptador de carga x 1FONDOResetInterfazAntes de usarlo por favor presta atención a la interfaz ybotón de la cámara.PARTE TRASERA1. Descargue la APP “Gadnic IP” en Google Play oAppStore según el sistema operativo de su dispositivo.Operación2. Enciende el dispositivoConecta la cámara a la salida de corriente. Luego de encenderla, el dispositivo hará una señal sonora indicando que “El sistema hainiciado, esperando para ser configurado”. Eso significa que has encendido la cámara.Imagen 1Imagen 21. Abre la app “Gadnic IP”, presione ingreso, si no tienes datos para ingresar, deberás registrarte primero.2. Agregue un dispositivo.Haga click en “+” ubicado en la esquina superior derecha (imagen 2).Nota : Habrá asistencia por voz durante la configuración, por favor no empiece a configurar el dispositivo hasta que éste se lo indique.Imagen 3Imagen 4Haga que su teléfono esté cerca de la cámara hasta que escuche ”Conexión exitosa (connect successfully) ”Nota:1. Configurar el dispositivo con WiFi : Para el primer uso, o usos después de reiniciar el equipo a la configuración de fábrica.(Recomendado)2. Agrega mi dispositivo (Modo AP): Presione el botón de reinicio 3 veces para entrar en el modo AP. Una vez dentro, la cámaracompartirá un punto de conexión llamado “camara_xxxx”. Parateléfonos Android, haga click en “camera_xxxx” para conectartedirectamente. Para iPhone, por favor vaya a Configuraciones, WLAN -- Encontrar cámara con punto de red WiFi, e introduce la clave: 1234567890Imagen 5Imagen 6encuentre dentro del rango de acción de la cámara.3. Agregar dispositivos compartidos: p ara equipos que se encuentran conectados, introduzca el número de serial de la cámara o escanee el código QR para entrar directamente.4. Agregar el dispositivo en la misma WLAN: Busque dispositivos en la misma red, haga click en esos dispositivos. (Para conexión con cables)04. Luego de escuchar la voz indicando “Conexión exitosa”,solicitará introducir la clave, y confirmar. (Imagen 5)05. Luego de “confirmar” solicitará escoger un nombre (imagen 6)de vídeo (imagen 7). Haga click sobre el botón de la parte superior derecha de vista en vivo, como muestra la imagen. Aquí podrárealizar configuraciones básicas del dispositivo.●● ●No necesita registrarse. Agregue el dispositivo, luego chequee el vídeo. (la información será almacenada sólo en su telefono. Si cambia de teléfono,deberá reiniciar, descargar y agregar el dispositivo nuevamente. Este método de ingreso no soporta notificaciones.Abre la app “Gadnic IP”, elige visita temporal.Haga click sobre la parte superior derecha “+”, según muestra la imagen y finalice agregando la cámara.Por favor, busque la instrucción a operaciones del “modelo de usuario - 02/03”Preguntas FrecuentesQ: ¿En qué formato se guardan los vídeos?A: Actualmente, la cámara soporta formato FAT32G, tarjetas de memoria Class6, Class10, de máximo 128G. Cuando la tarjeta de memoria está ful, automáticamente borrará los vídeos más antiguos y seguirá grabando.Q: Si la cámara se desconecta, ¿qué hago?A: Chequee la corriente y el WiFi.Reinicie la conexión y la cámara.Reconfigure la cámara.Chequee la conexión de banda ancha.Q: ¿Cómo cambiar de red?A: Cuando desee utilizar una nueva red, por favor mantenga presionado el botón (SET) por 6 segundos hasta que se reinicie a la configuración defábrica. Luego de eso la cámara estará lista para ser configurada nuevamente.Q: Me encuentro en una red de 5GHz, ¿aún podría usar la cámara? A: Nuestras cámaras no pueden conectarse a redes de 5GHz y deben conectarse necesariamente a redes de 2.4GHz. Todos los routers tienen redes de 2.4GHz disponibles, si te encuentras en una red de 5GHztendrás que ajustar tu configuración para conectarte con tu cámara.InstruccionesLa app y el sistema del dispositivo tendrán actualizaciones de forma irregular, podrás actualizarlo de forma online a través de las opciones de la app, las instrucciones son solamente por referencia.Mientras use este producto, por favor modifique la contraseña frecuentemente para evitar apropiaciones indeseadas.No instale el aparato en lugares húmedos, polvorientos, o de fácil acceso para niños.Por favor permita, dentro de lo posible, guardarlo en un ambiente seguro. No intente desarmar el aparato bajo ningún motivo.Problemas y Soluciones1. Si se presenta retraso, lentitud o problemas de reproducción de vídeo, pérdida de conexión, el problema puede deberse a baja señal causada por no estar dentro del rango óptimo de distancia entre la cámara y elteléfono. Por favor acérquese para poder realizar estas operaciones sin problemas.2. Asegúrese de que el CPU no esté a menos de 1.5GHz, o el vídeo en tiempo real podría retrasarse durante la previsualización. (La grabación de vídeo en la tarjeta de memoria no será interrumpida por esto)3. Químicos abrasivos no son permitidos a la hora de limpiar la superficie de la cámara. Se recomienda usar una toalla húmeda de tela o papel.。
萤石云视频说明书

参数与维护
电源供应 工作温度 工作湿度 维修保存条件
DC12V/1A - 20℃~50℃ 0~95%RH 清洁与维护前,应先断开电源并关机
FAQ
Q: 视频加密密码是什么? A: 视频加密密码默认为设备的验证码,即设备标签上六位大写的
字母。
Q: 如何存储录像? A: 摄像机支持两种存储方式:
1、Micro SD卡(需购买):初次使用前请登录“萤石云视频” 客户端初始化; 2、云存储(需购买):4G网络下使用云存储会消耗大量4G流 量,敬请注意。
扫描设备二维码
4 根据界面提示完成设备添加。
设备出厂时有赠送4G网络流量,请在“萤石云视频”客户端的“设置 ->4G网络”关注设备的流量使用情况,建议在赠送流量消耗完前,及 时进行流量充值。
设备流量充值入口1: 在“萤石云视频”客户端,点击“设置->4G网络”进入物联网卡流量管理 页面,点击“购买套餐”,即可为其充值。
,需在萤石云平台()完成用户注册,遵守《萤石
服务协议》、《萤石隐私政策》等,并接入萤石设备,以实现对萤
石设备的管理。
规范使用视频产品的倡议
感谢您选择萤石产品。 随着科技进步,技术应用的影响涉及到我们生活的方方面面。作为一家高 科技公司,我们日益深刻地认识到科技在提升效率、改善生活品质方面的 贡献,同时也认识到科技被不当使用也会带来伤害。例如视频监控产品, 因其能够录制真实、完整、清晰的影像,在回溯和还原事实方面具有突出 的价值,然而对影像记录的不当传播、不当使用和不当加工等也可能产生 侵犯他人合法权益的问题。为了不断推进科技向善,萤石倡议每一位用户 善用科技、善用视频产品,不仅遵循法律法规等规范要求,也遵循道德风 俗的约束,共同建立和维护我们良好的社会环境和氛围。 请您仔细阅读如下倡议: 1. 每个人都拥有合理的隐私期待,视频类产品的安装不应违背一个正常人 的合理隐私期待。在公共场所安装视频监控类产品时,应当以合理有效的 方式做出提示,明确监控区域;在非公共场所安装视频类产品时,不应当 侵犯他人的权利和利益,包括但不限于不应当在未经利害关系人同意的情 况下安装视频监控类产品、安装高隐蔽性的视频监控类产品。 2. 视频类产品使用期间,将在特定的条件下,对特定的时间和空间范围内 真实活动进行记录,用户应当对自身在该特定范围内享有的权利进行合理 界定,避免侵犯他人肖像、隐私或其他合法权利。 3. 视频类产品使用期间,将持续产生源于真实场景的视频影像数据,包括 产生大量生物数据(如人脸数据),数据可被应用或再加工应用等。视频 类产品本身并不能对数据使用做出好坏善恶的识别和区分,数据使用的结 果取决于数据控制者的使用方式、使用目的,数据控制者不仅应当遵循法 律法规等规范性要求,也应当尊重国际惯例及本地常规、社会道德、公序 良俗等非强制性要求,尊重个人的隐私、肖像及其他权利。 4. 鉴于视频类产品持续产生的视频影像数据承担有各利益相关方的权利保 护要求、价值主张或其他诉求,保护产品不受侵入、保护数据的安全是至 关重要的。产品使用者、数据控制者应当采取合理必要的举措,从而保证 数据安全,避免数据泄露、不当披露和使用,包括但不限于合理分配产品 的使用与管理权限,结合产品的使用场景建立并不断优化产品所接入的互 联网、局域网等各类网络的安全体系等。 5. 视频类产品已经为社会安全的提升做出了很大的贡献,我们相信这些产 品还将在社会生活的更多方面发挥积极作用。任何将这些产品用于侵犯人 权或违法犯罪的行为,都是违背技术创新和产品研发本意的。为此,萤石 鼓励每一位用户建立评估与跟踪机制,确保产品被正当、合理与善意地使 用。
萤石 智能屏幕 智能监控屏-SD7 CS-SD7-V100-1WTC 使用说明书

萤石SD7用户指南使用产品前请仔细阅读用户指南目录重要安全信息 �����������������������������������������������������3装箱清单 ������������������������������������������������������������4外观介绍 ������������������������������������������������������������5配置流程概览 �����������������������������������������������������6首次使用 ������������������������������������������������������������7设备安装 ������������������������������������������������������������9墙面/门上安装 ����������������������������������������������������������������������������9桌面安装 �����������������������������������������������������������������������������������13添加至“萤石云视频”客户端 ���������������������������15使用“萤石云视频”客户端 ������������������������������16规格参数 ����������������������������������������������������������18售后服务支持 ���������������������������������������������������18上门安装服务 �����������������������������������������������������������������������������19声明 ������������������������������������������������������������������������������������������19版权声明 ����������������������������������������������������������20规范使用视频产品的倡议 ���������������������������������22重要安全信息使用设备前请先阅读说明书。
智能3路开关套装用户指南 HS210 KIT 1910012319 REV1.0.0说明书
User GuideSmart Wi-Fi Light Switch, 3-Way KitHS210 KIT1910012319 REV1.0.0ContentsAbout This Guide (1)Introduction (2)Appearance (3)Set Up Y our Smart 3-Way Switch Kit (4)Main Pages (6)Configure Your Smart 3-Way Switch Kit (7)Create Scenes (9)Connect to Amazon Alexa or Google Home (10)Authentication (11)About This GuideThis guide provides a brief introduction to Smart 3-Way Switch Kit and the Kasa app, as well as regulatory information.Please note that features of Smart 3-Way Switch Kit may vary slightly depending on the model and software version you have, and on your location, language and internet service provider. All images, parameters and descriptions documented in this guide are used for demonstration only.ConventionsMore Info• Specifications can be found on the product page at .• Our T echnical Support and troubleshooting information can be found at /support.12Introduction 3-Way Switching, where a light is controlled from two switch locations, is common in hallways, stairs, and living rooms. 3-Way Switch wiring can be complex, but TP-Link’s Smart 3-Way Switch Kit makes it an easy smart home upgrade and provides control from anywhere, scheduling, and much more. The Kit includes 2 smart switches specially designed for 3-way switch wiring. The free Kasa app provides step-by-step instructions for wiring your switches and connecting them to your home Wi-Fi network.• No Extra Hardware Required - Convenient smart swtiches with no extra hardware required• Control Y our Lights From Anywhere - Control all of your home lighting using the Kasa app• Hands-free Experience - Control your lights by voice commands through support from Amazon Alexa and Google Assistant• Scheduling - Program lights to turn off and on at set times throughout the day or nightPhone not included;Works with iOS and Android3AppearanceSmart 3-Way Switch Kit has two LEDs that changes color according to its status, a RESTART button and a RESET button. See the explanation below:Press and hold (about 5 seconds) until the Wi-Fi status LED blinks amber and green alternately to initiate App-Config mode.Press and hold (about 10 seconds) until the Wi-Fi status LED blinks amber rapidly to factory reset the Smart Switch.Press to reboot the Smart Switch.White Lit up when the light is switched OFF to show the Smart Switch location in the dark.Blinking Amber and Green App-Config mode initiated.Green Lit up for about 30 seconds when connected to the Wi-Fi network, then turns off.Blinking Amber Res etting.RedNo Wi-Fi connection.4Follow the steps below to set up your Smart 3-Way Switch Kit via Kasa for Mobile app.1. Download and install Kasa app Go to Google Play or the Apple App Store or scan the QR code below to download the Kasa app on your Android or iOS smartphoneor tablet. 2. Log in or sign up with TP-Link ID Open the app. Use your TP-Link ID to log in. If you don’t have a TP-Link ID, tap Create Account and the Kasa app will guide youthrough the rest. 3. Remove old switches Find the circuit breaker and turn off the power. Remove your old switches but do notdisconnect the wires.5Follow the steps below to set up your Smart 3-Way Switch Kit via Kasa for Mobile app.4. Wire your new smart switch kit Follow the Kasa app instructions to wire your smart switch kit with the 3-Way wiring method. Then install and secure both switches afterthe wiring. 5. Set up and pair both switches With your smart switch kit secured, set up your first switch and then pair your secondone. Make sure they control the same light. 6. Complete and enjoy Y our smart switch kit is all set up and saved in your device list. Y ou can now enjoy using it.Main PagesAfter you successfully set up your Smart 3-Way Switch Kit, you will see the home page of the Kasa app. Here you can view the working status of all devices that you've added to Kasa and manage them. T ap on a smart switch to check the current status and runtime of your smart switch kit.Device StatusHome Page67On Device Status page, you can set Schedule, preset Away Mode, set Timer and change the settings of your smart switch kit.Set Schedule T ap to set a schedule for your smart switchkit to simplify your daily routine by creatingautomatic On/Off action.Preset Away Mode Tap to preset the Away Mode and yoursmart switch kit will be randomly turned on /off during this time.8On Device Status page, you can set Schedule, Away Mode, Timer and change the settings of your smart switch kit.Set Timer T ap to set the time to turn your smart switchkit on or off after specific times. Device Settings Tap to view and change the settings ofyour smart switch kit.Create ScenesA scene is a preset group of smart devices that can be programmed, customized and activated simultaneously at the touch of a button from your smartphone or tablet, allowing you to easily set your mood, activity or fit any special occasion. This page allows you to preset how your smart homedevices should act automatically at special occasions.9Connect to Amazon Alexa or Google HomeConnect your Smart 3-Way Switch Kit to Amazon Alexa or Google Home to enjoy a full hands-free experience - control your lights by voice commands. Follow a method below to connect your Smart 3-Way Switch Kit to Amazon Alexa or Google Home.Method 1:Launch Kasa app and go to Add Device > WORKS WITH KASA > Amazon Alexa / Google Assistant for detailed instructions.Method 2:Visit FAQs on the TP-Link official website for detailed instructions:Google Assistant:/us/faq-1534.htmlAmazon Alexa:10AuthenticationCOPYRIGHT & TRADEMARKSSpecifications are subject to change without notice. is a registered trademark of TP-Link T echnologies Co., Ltd. Other brands and product names are trademarks or registered trademarks of their respective holders.No part of the specifications may be reproduced in any form or by any means or used to make any derivative such as translation, transformation, or adaptation without permission from TP-Link T echnologies Co., Ltd. Copyright © 2018 TP-Link T echnologies Co., Ltd. All rights reserved.FCC compliance information statementProduct Name: Smart Wi-Fi Light Switch, 3-Way KitModel Number: HS210 KITResponsible party:TP-Link USA Corporation, d/b/a TP-Link North America, Inc.Address: 145 South State College Blvd. Suite 400, Brea, CA 92821Website: /us/T el: +1 626 333 0234Fax: +1 909 527 6803E-mail: *********************This equipment has been tested and found to comply with the limits for a Class B digital device, pursuant to part 15 of the FCC Rules. These limits are designed to provide reasonable protection against harmful interference in a residential installation. This equipment generates, uses and can radiate radio frequency energy and, if not installed and used in accordance with the instructions, may cause harmful interference to radio communications. However, there is no guarantee that interference will not occur in a particular installation. If this equipment does cause harmful interference to radio or television reception, which can be determined by turning the equipment off and on, the user is encouraged to try to correct the interference by one or more of the following measures:• Increase the separation between the equipment and receiver.• Connect the equipment into an outlet on a circuit different from that to which the receiver is connected.• Consult the dealer or an experienced radio/ TV technician for help.This device complies with part 15 of the FCC Rules. Operation is subject to the following two conditions:1. This device may not cause harmful interference.2. This device must accept any interference received, including interference that may cause undesired operation.Any changes or modifications not expressly approved by the party responsible for compliance could void the user’s authority to operate the equipment.Note: The manufacturer is not responsible for any radio or TV interference caused by unauthorized modifications to this equipment. Such modifications could void the user’s authority to operate the equipment.FCC RF Radiation Exposure StatementThis equipment complies with FCC RF radiation exposure limits set forth for an uncontrolled environment. This device and its antenna must not be co-located or operating in conjunction with any other antenna or transmitter.“T o comply with FCC RF exposure compliance requirements, this grant is applicable to only Mobile Configurations. The antennas used for this transmitter must be installed to provide a separation distance of at least 20 cm from all persons and must not be co-located or operating in conjunction with any other antenna or transmitter.”We, TP-Link USA Corporation, has determined that the equipment shown as above has been shown to comply with the applicable technical standards, FCC part 15. There is no unauthorized change is made in the equipment and the equipment is properly maintained and operated.Issue Date: 2018.1.5Canadian Compliance StatementThis device complies with Industry Canada license-exempt RSSs. Operation is subject to the following two conditions:1. This device may not cause interference, and2. This device must accept any interference, including interference that may cause undesired operation of the device.Le présent appareil est conforme aux CNR d’Industrie Canada applicables aux appareils radio exempts de licence. L’exploitation est autorisée aux deux conditions suivantes :1. l’appareil ne doit pas produire de brouillage;2. l’utilisateur de l’appareil doit accepter tout brouillage radioélectrique subi, meme si le brouillage est susceptible d’en compromettre le fonctionnement.Radiation Exposure Statement:This equipment complies with IC radiation exposure limits set forth for an uncontrolled environment. This equipment should be installed and operated with minimum distance 20cm between the radiator & your body.Déclaration d’exposition aux radiations:Cet équipement est conforme aux limites d’exposition aux rayonnements IC établies pour un environnement non contrôlé. Cet équipement doit être installé et utilisé avec un minimum de 20 cm de distance entre la source de rayonnement et votre corps.Industry Canada StatementCAN ICES-3 (B)/NMB-3(B)NCC Notice注意!依據 低功率電波輻射性電機管理辦法第十二條 經型式認證合格之低功率射頻電機,非經許可,公司、商號或使用者均不得擅自變更頻率、加大功率或變更原設計之特性或功能。
萤石 宠物喂食器用户指南

微信扫描二维码关注“萤石智能生活”订阅号版权所有©杭州萤石软件有限公司。
保留一切权利。
本手册的任何部分,包括文字、图片、图形等均归属于杭州萤石软件公司或其关联公司(以下简称“萤石”)。
未经书面许可,任何单位或个人不得以任何方式摘录、复制、翻译、修改本手册的全部或部分。
除非另有约定,萤石不对本手册提供任何明示或默示的声明或保证。
关于本产品本手册描述的产品仅供中国大陆地区销售和使用。
本产品只能在购买地所在国家或地区享受售后服务及维保方案。
关于本手册本手册仅作为相关产品的指导说明,可能与实际产品存在差异,请以实物为准。
因产品版本升级或其他需要,萤石可能对本手册进行更新,如您需要最新版手册,请您登录萤石官网查阅()。
萤石建议您在专业人员的指导下使用本手册。
商标声明· 、 、 为萤石的注册商标。
·本手册涉及的其他商标由其所有人各自拥有。
责任声明·在法律允许的最大范围内,本手册以及所描述的产品(包含其硬件、软件、固件等)均“按照现状”提供,可能存在瑕疵或错误。
萤石不提供任何形式的明示或默示保证,包括但不限于适销性、质量满意度、适合特定目的等保证;亦不对使用本手册或使用萤石产品导致的任何特殊、附带、偶然或间接的损害进行赔偿,包括但不限于商业利润损失、系统故障、数据或文档丢失产生的损失。
·您知悉互联网的开放性特点,您将产品接入互联网可能存在网络攻击、黑客攻击、病毒感染等风险,萤石不对因此造成的产品工作异常、信息泄露等问题承担责任,但萤石将及时为您提供产品相关技术支持。
·使用本产品时,请您严格遵循适用的法律法规,避免侵犯第三方权利,包括但不限于公开权、知识产权、数据权利或其他隐私权。
您亦不得将本产品用于大规模杀伤性武器、生化武器、核爆炸或任何不安全的核能利用或侵犯人权的用途。
·如本手册内容与适用的法律相冲突,则以法律规定为准。
“萤石云”声明本产品部分功能(包括但不限于消息推送、远程管理、分享等功能)的实现将依赖于互联网、电信增值服务;您若希望实现以上功能,需在萤石云平台()完成用户注册,遵守《萤石服务协议》、《萤石隐私政策》等,并接入萤石设备,以实现对萤石设备的管理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
微型航姿参考系统 MAHRS 3DM-S10A/B 用户指南 Version 1.312012 年 6 月 10 日1. 简介微型航姿参考系统(MAHRS 3DM-S10系列是一款微型的全姿态测量传感装置,它由三轴 MEMS 陀螺、三轴 MEMS 加速度计、三轴磁阻型磁强计等三种类型的传感器构成。
三轴陀螺用于测量载体三个方向的绝对角速率,三轴加速度计用于测量载体三个方向的加速度,在系统工作中, 主要作用是感知系统的水平方向的倾斜,并用于修正陀螺在俯仰和滚动方向的漂移,三轴磁阻型磁强计测量三维地磁强度,用于提供方向角的初始对准以及修正航向角漂移。
微型航姿参考系统 3DM-S10系列,可提供的输出数据有:原始数据、四元数、姿态数据等(产品外形如图 1所示。
图 1 微型航姿参考系统(MAHRS 3DM-S10系列外形(A 型 / B型2. 特性实时三轴惯性输出;大于 100Hz 的内部更新率;尺寸小、重量轻;低功耗;RS-232/RS-485A串行接口,方便连接。
3. 应用领域车载控制系统;航空航天电子系统;虚拟现实系统;平台稳定系统;机器人控制等。
4. 工作原理及软硬件框图微型航姿参考系统(MAHRS 3DM-S10系列采用陀螺来测量载体的绝对角速率,然后载体的姿态角(航向角、俯仰角和滚动角就可以通过陀螺输出数据的特定的解算方法来获得。
加速度计用于确定 3DM-S10系列初始姿态角,并修正并确定陀螺在水平方向(俯仰角和滚动角的漂移。
三轴磁阻型磁强计用于提供方位角的初始对准以及修正陀螺的航向角漂移。
微型航姿参考系统 (MAHRS 3DM-S10系列内部的嵌入式处理器中设计有传感器融合算法,重力测量值(通过加速度计和磁北向测量值(通过磁力计有机融合并对漂移进行补偿,避免了因为角速率数据的积分运算带来的误差的无限累积。
而微型航姿参考系统(MAHRS 3DM-S10系列相比无陀螺的电子罗盘具有很大的优势, 在动态情况下它能够精确解算航姿, 而一般的电子罗盘只能在静态条件下运用, 在动态情况下无法得到精确的航姿信息。
微型航姿参考系统(MAHRS 3DM-S10系列可以可靠提供全姿态信息和原始数据,数据更新率可达到 100Hz 以上。
图 2 微型航姿参考系统(MAHRS 3DM-S10系列硬件框图图 3 微型航姿参考系统(MAHRS 3DM-S10系列软件框图5. 规格表 1 3DM-S10A/B 绝对最大额定值性能指标参数单位供电电压 (Vss-Vdd -0.3 … +9 V 引脚电压范围 -7 … +12 V 结温表 2 3DM-S10A/B 性能指标性能指标参数单位输出数据格式原始数据、姿态角、四元数内部更新率启动时间 < 1 sec 静态角度误差(俯仰、滚动 ± 0.1 degree 动态角度误差(俯仰、滚动 ± 1.0 degree 静态角度误差(航向 ± 0.5 degree 动态角度误差(航向 ± 2 degree 航向角分辨率加速度计测量范围 ± 2, ± 4, ± 8 g 加速度计零偏稳定性 ± 0.003 (± 2g g 加速度计非线性 0.2 % - 速率陀螺测量范围 ± 300, ± 500 , ± 2000 °/sec 速率陀螺零偏稳定性 ±0.2 ( 在 ± 300°/秒时 °/sec 速率陀螺非线性 0.2 % - 磁力计测量范围磁力计非线性 0.4 % - 磁力计零偏稳定性短时冲击 500 (Not reinforced表 3 3DM-S10A/B电气特性电气特性最小典型最大单位供电电压 4.5 5.0 9.0 V 供电电流 40 60 80 mA 功耗 <300 mW表 4 3DM-S10A/B物理特性物理特性参数单位尺寸长 x 宽 x 高 mm 重量规定温度范围工作温度范围存储温度范围 -25 +80 ºC表 5 3DM-S10A/B 引脚定义序号名称功能供电地A/B从陀螺仪、加速度计、磁力计以及内部温度传感器得到的数据,全部被传输到嵌入式系统 -数字信号处理器(DSP 中。
数字信号处理器(DSP 依据特定的算法以及存储在 Flash 存储器中的标定数据处理来自传感器的原始数据,作为其基本算法,微型航姿参考系统(MAHRS 3DM-S10系列采用自适应卡尔曼滤波算法,该算法能够自动调整并适应不断变化的动态条件,而无需外部人为的干预。
微型航姿参考系统(MAHRS 3DM-S10系列产品均在特定的环境实验条件下,并参考已知温度下的加速度、角速率和磁场进行全面的标定,并将标定数据输入每个产品中。
用户可以通过串口收发接口接收航姿信息及原始数据,同时也可以通过命令方式进行交互操作(详见微型航姿参考系统(MAHRS 3DM-S10系列通信协议。
微型航姿参考系统(MAHRS 3DM-S10系列的供电电源标准值为 DC+5.0V,数据线和电源线整合在一个接插装置中,方便使用,各引脚定义参见表 3。
6. 机械尺寸微型航姿参考系统(MAHRS 3DM-S10系列尺寸如图 4所示。
图 4 微型航姿参考系统(MAHRS 3DM-S10系列尺寸7 通讯协议及使用7.1 通讯接口及设置参数微型航姿参考系统(MAHRS 3DM-S10系列接口采用标准 RS232和 RS485A 串行接口,系统加电后,程序在处理器中运行,并通过串行接口连接通讯,启动时间小于 1秒。
接口参数设置如表 6:表 6波特率 115200数据位数 8校验位无停止位 17.2 通讯协议结构微型航姿参考系统(MAHRS 3DM-S10系列的通讯协议采用统一的报文包结构形式,有效传输数据长度为 0-255字节,总长度为 5-260字节。
其结构形式如下:PRE BID MID LEN DATA CS表 7字节段字节数描述PRE 1 字节首字节,表示包起始(0xFABID 1 字节设备地址(默认:0x01MID 1 字节报文种类(命令LEN 1 字节数据长度DATA 0 – 255 字节数据CS 1 字节校验位首字节(起始字节 (PRE每个消息包都以该字节作为起始字节,是一个特定字节,本版本下首字节为0xFA 。
设备地址(BID每个微型航姿参考系统(MAHRS 3DM-S10A/都有的设备地址定义,默认为0x01。
报文种类(命令 (MID该字节段表示何种报文(命令 ,具体意义见 7.3。
数据长度 (LEN表示数据(DATA 的长度,取值为 0-255。
如果为 0,表示无数据字节。
数据 (DATA报文中包含的有效数据,数据大小由数据长度(LEN 限定。
校验位(CS该字节段为一个字节,是报文的校验字节。
它是由除其本身外所有字节的异或(XOR 计算得出。
7.3 通讯协议一般每个报文包含特定的 MID 值,以及和报文种类(命令 MID 相对应的数据长度的数据。
3DM-S10系列数据输出方式包括:完全数据输出方式(原始数据 ;完全数据输出方式(处理数据 ;姿态角输出方式;四元数输出方式;姿态角及四元数输出方式。
7.3.1 输入报文格式输入报文内容包括:AHRS0 AHRS1, AHRS2, AHRS3, AHRS4 命令AHRS0命令 -完全数据输出方式(原始数据 ,连续输出 MID=0x80,单步输出MID=0x81; AHRS1命令 -完全数据输出方式(处理数据 ,连续输出 MID=0x82,单步输出 MID=0x83; AHRS2命令 -姿态角输出方式,连续输出 MID=0x84,单步输出MID=0x85;AHRS3命令 -四元数输出方式,连续输出 MID=0x86,单步输出 MID=0x87;AHRS4命令 -姿态角及四元数输出方式,连续输出 MID=0x88,单步输出MID=0x89;在收到输入报文后,微型航姿参考系统(MAHRS 3DM-S10A/B将立即响应,并执行相应的命令,连续或单步输出相应报文信息。
输入报文示例:AHRS1 命令–完全数据输出方式;输出报文:0xFA 0x01 0x82 0x00 0x79输出报文:0xFA 0x01 0x82 0x40 LL LH HL HH … … … … LL LH HL HH CS\________(数据区 64字节 ________/输出的报文前三个字节和输入报文相同,表示设备连接正常。
第 4字节为数据长度 0x40, 表示数据区有 64个字节的有效数据,末尾字节 CS 为前面所有字节的异或(XOR 。
7.3.2 输出报文格式如上面描述,用户可选择所需数据输出方式,输出报文格式如表 8所示。
表 8:输出报文格式字节段字节数字节号描述PRE 1字节 0 首字节,表示包起始(0xFABID 1字节 1 设备地址(默认:0x01MID 1字节 2 报文种类(命令LEN 1字节 3 数据长度Data1 4字节 4-7 数据 Data1DataN 4字节 4N 数据 DataNCS 1字节 4(N+1 校验位3DM-S10系列实际数据输出报文如表 9至表 13所示。
表 9:AHRS0命令 -完全数据输出方式(原始数据 ,连续输出 MID=0x80,单步输出MID=0x81 字节段字节数字节号描述PRE 1字节 0 首字节,表示包起始(0xFABID 1字节 1 设备地址(默认:0x01MID 1字节 2 0x80(或 0x81LEN 1字节 3 0x40(64字节GyroX 4字节 4-7 X 轴陀螺角速率原始数据 (rad/sGyroY 4字节 8-11 Y 轴陀螺角速率原始数据 (rad/sGyroZ 4字节 12-15 Z 轴陀螺角速率原始数据 (rad/sAccX 4字节 16-19 X 轴加速度计原始数据 (mgAccY 4字节 20-23 Y 轴加速度计原始数据 (mgAccZ 4字节 24-27 Z 轴加速度计原始数据 (mgMagX 4字节 28-31 X 轴磁强计原始数据 (mguassMagY 4字节 32-35 Y 轴磁强计原始数据 (mguassMagZ 4字节 36-39 Z 轴磁强计原始数据 (mguassQuat0 4字节 40-43 四元数 1 W (scalarQuat1 4字节 44-47 四元数 2 XQuat2 4字节 48-51 四元数 3 YQuat3 4字节 52-55 四元数 4 ZRoll 4字节 56-59 滚动角 (degPitch 4字节 60-63 俯仰角 (degYaw 4字节 64-67 方位角 (degCS 1字节 68 校验位字节段字节数字节号描述PRE 1字节 0 首字节,表示包起始(0xFA BID 1字节 1 设备地址(默认:0x01 MID 1字节 2 0x82(或 0x83LEN 1字节 3 0x40(64字节GyroX 4字节 4-7 X 轴陀螺角速率 (rad/sGyroY 4字节 8-11 Y 轴陀螺角速率 (rad/sGyroZ 4字节 12-15 Z 轴陀螺角速率 (rad/sAccX 4字节 16-19 X 轴加速度计 (mgAccY 4字节 20-23 Y 轴加速度计 (mgAccZ 4字节 24-27 Z 轴加速度计 (mgMagX 4字节 28-31 X 轴磁强计 (mguassMagY 4字节 32-35 Y 轴磁强计 (mguassMagZ 4字节 36-39 Z 轴磁强计 (mguassQuat0 4字节 40-43 四元数 1 W (scalarQuat1 4字节 44-47 四元数 2 XQuat2 4字节 48-51 四元数 3 YQuat3 4字节 52-55 四元数 4 ZRoll 4字节 56-59 滚动角 (degPitch 4字节 60-63 俯仰角 (degYaw 4字节 64-67 方位角 (degCS 1字节 68 校验位表 11:AHRS2命令 - 姿态角输出方式,连续输出 MID=0x84,单步输出 MID=0x85 字节段字节数字节号描述PRE 1字节 0 首字节,表示包起始(0xFA BID 1字节 1 设备地址(默认:0x01MID 1字节 2 0x84(或 0x85LEN 1字节 3 0x0C (12字节Roll 4字节 4-7 滚动角 (degPitch 4字节 8-11 俯仰角 (degYaw 4字节 12-15 方位角 (degCS 1字节 16 校验位字节段字节数字节号描述PRE 1字节 0 首字节,表示包起始(0xFABID 1字节 1 设备地址(默认:0x01MID 1字节 2 0x86(或 0x87LEN 1字节 3 0x10(16字节Quat0 4字节 4-7 四元数 1 W (scalarQuat1 4字节 8-11 四元数 2 XQuat2 4字节 12-15 四元数 3 YQuat3 4字节 16-19 四元数 4 ZCS 1字节 20 校验位表 13:AHRS4命令 -姿态角及四元数输出方式,连续输出 MID=0x88,单步输出MID=0x89 字节段字节数字节号描述PRE 1字节 0 首字节,表示包起始(0xFABID 1字节 1 设备地址(默认:0x01MID 1字节 2 0x88(或 0x89LEN 1字节 3 0x1C (28字节Quat0 4字节 4-7 四元数 1 W (scalarQuat1 4字节 8-11 四元数 2 XQuat2 4字节 12-15 四元数 3 YQuat3 4字节 16-19 四元数 4 ZRoll 4字节 20-23 滚动角 (degPitch 4字节 24-27 俯仰角 (degYaw 4字节 28-31 方位角 (degCS 1字节 32 校验位8 SY2303ZJH驱动安装在光盘中, Driver 目录下有 SY2303ZJH 的驱动安装程序,转接盒采用 USB 转RS485/RS232的方案, USB 芯片采用 PL-2303接口芯片。