飞行器姿态测量系统设计
四轴飞行器姿态控制算法

四轴飞行器姿态控制算法四轴飞行器姿态控制是指通过调整四个电机的转速,使得飞行器能够保持所需的姿态,例如平稳飞行、转弯、盘旋等。
姿态控制算法主要包括传感器采集、姿态估计和控制指令生成等几个部分。
以下将详细介绍四轴飞行器姿态控制的算法原理。
1.传感器采集:四轴飞行器通常会配备三个主要的传感器:加速度计、陀螺仪和磁力计。
加速度计用于测量飞行器的重力加速度,陀螺仪用于测量飞行器的角速度,磁力计用于测量地磁场强度。
这些传感器的数据将用于后续的姿态估计和控制。
2.姿态估计:姿态估计是根据传感器提供的数据计算出飞行器的当前姿态角。
一种常用的姿态估计方法是互补滤波器。
互补滤波器将加速度计和陀螺仪的数据进行融合,通过加速度计估计出的姿态角和陀螺仪估计出的姿态角进行加权平均,从而得到更准确的姿态估计。
3.控制指令生成:姿态控制器的目标是生成适当的转速指令,使得飞行器能够达到所需的姿态。
在四轴飞行器中,姿态控制通常分为俯仰控制、滚转控制和偏航控制三个方向。
俯仰控制用于调整飞行器的前后倾斜角度,滚转控制用于调整飞行器的左右倾斜角度,偏航控制用于调整飞行器的旋转角度。
在控制指令生成中,通常会采用PID控制器。
PID控制器根据目标姿态角和当前姿态角的误差,计算出相应的控制指令。
PID控制器包括三个参数:比例项、积分项和微分项。
比例项用于快速响应误差,积分项用于消除稳态误差,微分项用于抑制系统的振荡。
通过将三个方向的控制指令进行线性叠加,得到最终的转速指令。
转速指令将被发送到四个电机,控制它们的转速,从而实现飞行器的姿态调整。
值得注意的是,四轴飞行器还需要考虑到动力学和非线性因素。
动力学因素包括电机的动态响应和旋转惯量的影响,通常会使用动态模型进行补偿。
非线性因素包括旋翼的非线性动力学和空气动力学特性的影响,通常会采用非线性控制器进行补偿。
综上所述,四轴飞行器姿态控制算法主要包括传感器采集、姿态估计和控制指令生成等几个部分。
飞行器导航控制系统设计与实现

飞行器导航控制系统设计与实现随着航空技术的不断发展,飞行器导航控制系统的设计与实现也在不断升级和优化。
该系统是飞行器安全飞行的重要保障措施之一,需要满足高精度、高稳定性、高可靠性等要求。
一、概述飞行器导航控制系统是指在飞行器飞行过程中,实现导航、控制和监测的一套系统。
随着航空技术的迅速发展,该系统的要求也越来越高,必须满足多模态、高精度和全天候运行的需求。
二、系统组成1、惯性导航系统惯性导航系统是飞行器导航控制系统的重要组成部分,用于提供飞机的三维姿态信息(即俯仰角、滚转角和偏航角),同时也提供飞机的机动状态。
2、全球卫星定位系统(GPS)GPS提供高精度的位置和速度信息,一般用于飞行器的航线规划和飞行期间的导航控制。
3、气压计高度计气压计高度计主要用于测量飞机的高度,以确定飞行器的高度信息。
4、电子罗盘电子罗盘可以测量飞机的头向角,即航向角。
它通过测量地磁场来确定航向角。
5、飞行数据记录器飞行数据记录器用于记录飞机的运行状态和相关数据,以供后续分析和评估使用。
三、系统设计飞行器导航控制系统的设计要满足精度高、可靠性强、实时性好等要求。
下面是一些常见的设计要点:1、采用多重备份导航控制系统中的每个组件都有可能出现故障,因此必须采用多种备份措施,保证系统的稳定性和可靠性。
可以采用冗余设计或备件更换等方法来提高飞行器的安全性能。
2、强化通信导航控制系统和地面控制站之间需要进行通信,确保飞行器的实时控制和导航。
通信环节需要注意互联网安全以及保密性等方面的问题。
3、进行模拟仿真分析在设计导航控制系统时,可以采用模拟仿真分析的方式,模拟各种复杂的飞行情况,以评估系统的稳定性和性能。
这种方法能有效提高系统的可靠性和安全性。
四、系统实现系统实现需要依据设计方案对相关组件进行集成和测试,实现系统的正确运行。
在实现过程中,应该关注以下几个方面:1、功能实现导航控制系统的实现目标是保证飞行器的安全运行。
因此,系统实现必须能够准确地实现飞机的状态监测和控制。
航天飞行器导航与控制系统设计与仿真
航天飞行器导航与控制系统设计与仿真导语:航天飞行器是现代科技的巅峰之作,它的导航与控制系统是其正常运行和控制的核心。
本文将探讨航天飞行器导航与控制系统的设计原理、关键技术以及仿真模拟的重要性。
一、航天飞行器导航与控制系统设计原理航天飞行器的导航与控制系统设计原理主要包括三个方面,即姿态控制、导航定位和轨迹规划。
1. 姿态控制:姿态控制是指通过控制飞行器的各种运动参数,使其保持稳定的飞行姿态。
对于航天飞行器来说,由于外部环境的复杂性和飞行任务的特殊性,姿态控制尤为重要。
常用的姿态控制方法包括PID控制、模型预测控制和自适应控制等。
2. 导航定位:导航定位是指通过测量飞行器的位置和速度等参数,确定其在空间中的位置。
现代航天飞行器的导航定位通常采用多传感器融合的方式,包括惯性导航系统、卫星定位系统和地面测控系统等。
其中,卫星导航系统如GPS、北斗系统等具有广泛应用。
3. 轨迹规划:轨迹规划是指根据航天飞行器的飞行任务和外部环境的要求,确定其飞行轨迹和航线。
航天飞行器的轨迹规划需要考虑多个因素,如飞行器的运动特性、飞行任务的要求、空间障碍物等。
二、航天飞行器导航与控制系统的关键技术航天飞行器导航与控制系统设计离不开一些关键技术的支撑,其中包括:1. 传感器技术:传感器技术是导航与控制系统的基础,可以通过传感器对飞行器的姿态、速度、位置等进行准确测量。
陀螺仪、加速度计、GPS接收机等传感器设备的精度和稳定性对导航与控制系统的性能有着重要影响。
2. 控制算法:姿态控制和导航定位需要高效的控制算法来实现。
PID控制算法是常用的姿态控制方法,模型预测控制和自适应控制等算法则在一些特殊应用中得到了广泛应用。
对于导航定位,卡尔曼滤波和粒子滤波等算法可以很好地利用多传感器信息进行位置估计。
3. 轨迹规划算法:航天飞行器的轨迹规划需要考虑多个因素,如安全性、能耗等。
基于遗传算法和优化算法的轨迹规划方法可以在不同的约束条件下求解最优解。
哈工大《飞行器设计综合实验》高桦实验一
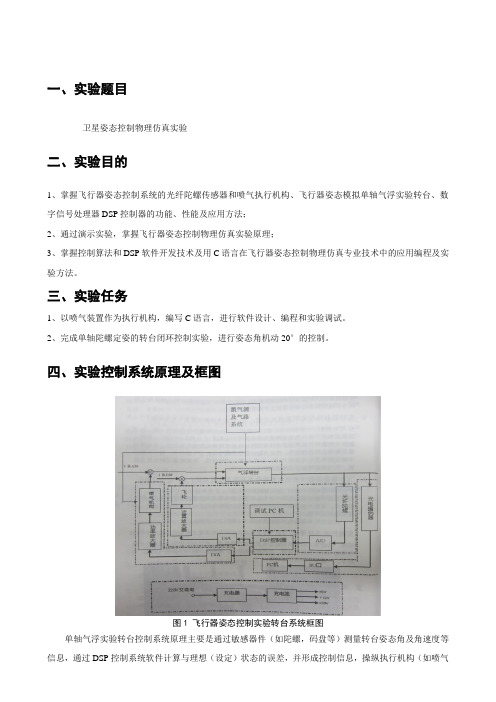
一、实验题目卫星姿态控制物理仿真实验二、实验目的1、掌握飞行器姿态控制系统的光纤陀螺传感器和喷气执行机构、飞行器姿态模拟单轴气浮实验转台、数字信号处理器DSP控制器的功能、性能及应用方法;2、通过演示实验,掌握飞行器姿态控制物理仿真实验原理;3、掌握控制算法和DSP软件开发技术及用C语言在飞行器姿态控制物理仿真专业技术中的应用编程及实验方法。
三、实验任务1、以喷气装置作为执行机构,编写C语言,进行软件设计、编程和实验调试。
2、完成单轴陀螺定姿的转台闭环控制实验,进行姿态角机动20°的控制。
四、实验控制系统原理及框图图1 飞行器姿态控制实验转台系统框图单轴气浮实验转台控制系统原理主要是通过敏感器件(如陀螺,码盘等)测量转台姿态角及角速度等信息,通过DSP控制系统软件计算与理想(设定)状态的误差,并形成控制信息,操纵执行机构(如喷气装置,飞轮等),使转台回到设定位置。
五、控制算法及说明:喷气控制单回路姿态控制动力学方程为:dj T T J +=θ ,()00θθ=t ,()00θθ =t 式中,0θ、0θ 为姿态角、姿态角速度的初值,且00θθ =。
喷气推力器取为理想继电特性,并以线性姿态角θ作为反馈信号,当不计姿态角给定量(0=r θ)时,有控制方程0,0>-θj T()=t T j0,0<+θj T式中,0j T 为()t T j 的幅值。
系统的方框图如图2所示。
图2 喷气推理器取为理想继电特性的单回路姿态稳定系统方框图研究非线性控制系统常用的一种分析方法是相平面法,即在有姿态角θ和姿态角速度θ构成的直角坐标平面(相平面)上,研究θ与θ 间的运动轨迹(相轨迹),进而可获得关于系统过渡过程时间、超调量、极限环等主要姿控指标。
图3 理想喷气推理器的单回路姿态稳定系统的相轨迹图4 相平面法的DSP 实现原理图控制算法为0,≤+s U=U0,>-s U式中,U 为输出的控制量,f θ为角度预期值,M 为气浮转台的力矩,J 为气浮转台的转动惯量。
基于STM32单片机的无人机飞行控制系统设计

基于STM32单片机的无人机飞行控制系统设计基于STM32单片机的无人机飞行控制系统设计一、引言无人机作为一种高效、灵活的飞行器,已经广泛应用于农业、航空摄影、物流等领域。
无人机的飞行控制系统是实现无人机稳定飞行的核心部件,关乎到无人机的安全性和性能。
本文将基于STM32单片机,设计一种高效稳定的无人机飞行控制系统。
二、系统设计方案1. 硬件设计无人机飞行控制系统的硬件设计包括主控芯片选型、传感器选择与连接、无线通信模块等。
(1)主控芯片选型本系统选用STM32系列单片机作为主控芯片。
STM32单片机具有高性能、低功耗和丰富的外设接口等特点,适合用于嵌入式系统设计。
(2)传感器选择与连接无人机的稳定飞行依赖于姿态传感器、气压传感器等,用于实时测量无人机的姿态信息和气压信息。
通过SPI或I2C接口,将传感器与STM32单片机连接。
(3)无线通信模块为了实现与地面控制站的通信,本系统选用WiFi或蓝牙模块作为无线通信模块。
通过无线通信模块,实现无人机与地面控制站之间的数据传输和指令控制。
2. 软件设计无人机飞行控制系统的软件设计包括飞行控制算法的实现、通信协议的设计和图形界面开发等。
(1)飞行控制算法本系统采用PID控制算法实现无人机的稳定飞行。
PID控制算法能根据无人机的姿态信息,实时调整无人机的控制指令,使其保持稳定飞行。
(2)通信协议设计在无人机飞行控制系统中,需要设计一种通信协议,在无人机和地面控制站之间进行数据传输。
本系统采用串口通信协议,在硬件上通过UART接口实现无人机和地面控制站之间的数据交互。
(3)图形界面开发为了方便用户对无人机进行操作和监控,本系统设计了图形界面。
通过图形界面,用户可以实时查看无人机的姿态信息、图像传输和设置飞行参数等。
三、系统实现及测试在系统设计完成后,需要进行实际的硬件搭建和软件开发。
在硬件搭建过程中,需要将选用的传感器、无线通信模块等进行连接。
在软件开发过程中,需要编写飞行控制算法、通信协议和图形界面等。
飞行器控制系统设计及性能评估

飞行器控制系统设计及性能评估飞行器控制系统是飞行器的核心组成部分之一,负责飞行器的控制和导航任务。
在现代飞行器控制系统设计中,越来越多的采用了各种复杂的控制算法和高级传感技术,以确保飞行器能够实现更精确的控制、导航和飞行任务。
本文将就飞行器控制系统的设计和性能评估这两个方面进行论述,为读者提供有关该主题的详细信息。
一、飞行器控制系统设计在现代飞行器控制系统设计中,传感器、执行器、控制器等组件是必不可少的组成部分。
这些组件分别用于测量飞行器的状态、驱动飞行器舵面、以及实现控制和导航算法。
接下来我们将分别对这些组件进行讲解。
1. 传感器传感器是飞行器控制系统中最重要的组件之一,它能够测量飞行器的状态和环境信息,这些信息可以用于飞行器的控制和导航任务。
例如,加速度计和陀螺仪可以测量飞行器的加速度和角速度,从而计算出飞行器的速度和姿态;GPS接收机可以获取飞行器所在的经纬度和高度等信息,从而确定飞行器的位置。
传感器的种类繁多,根据任务需求,可以选择使用不同的传感器类型。
2. 执行器执行器是飞行器控制系统中另一个重要的组件,它可以驱动飞行器舵面来实现飞行器的控制和姿态调整。
执行器的种类也很多,例如电机、伺服马达、升降机、襟翼等。
在选用执行器时,需要考虑到任务需求、性能要求和成本等方面的因素。
3. 控制器控制器是飞行器控制系统中最核心的部件之一。
控制器的作用是根据传感器提供的状态信息,计算出需要调整的控制量,然后将调整信号发送给执行器。
现代控制器通常采用数字信号处理技术,并采用复杂的控制算法来实现更加精确的控制和导航任务。
例如,PID控制算法可以实现稳定的飞行姿态调整;LQG控制算法可以实现最优控制任务。
二、飞行器控制系统性能评估一旦飞行器控制系统被设计和实现完毕,就需要对其性能进行评估。
性能评估是评价飞行器控制系统能否满足任务需求的重要手段。
下面我们将就飞行器控制系统性能评估这一话题进行讲解。
1. 实验验证实验验证是飞行器控制系统性能评估的一个重要手段。
飞行器控制中的制导和姿态控制技术
飞行器控制中的制导和姿态控制技术飞行器作为现代航空运输工具的重要组成部分,其安全性和性能指标的提高,关系到人类文明进步、国家安全以及人民幸福的重大问题。
而制导与姿态控制技术则是飞行器控制系统的两个核心技术,其是否合理、高效、可靠,直接关系到飞行的安全、舒适性、运输效率和经济效益。
一、制导技术制导是指飞行过程中,通过指挥飞行器在所期望的轨道上自动或半自动飞行的一种技术。
制导系统的任务是自动或半自动地进行导航、规划、跟踪飞行轨迹,以及在允许范围内对轨迹误差进行补偿和校正。
常见的制导技术有惯性制导、GPS制导、光电制导及组合制导等。
其中惯性导航是最为常见的一种,其系统通过测量飞行载体加速度与角速度,以及改变速度和方向的环境载荷,计算出自身的飞行状态,进而实现导航与姿态控制。
而GPS制导、光电制导等技术则通过卫星信号和目标识别等手段,对飞行状态进行测量和矫正。
二、姿态控制技术姿态控制技术是指在飞行过程中,保持飞行器的稳定状态和期望的位置、方向和速度等参数,防止受到外界扰动而出现姿态失控、飞行不稳定等情况。
姿态控制系统对飞行器的姿态控制进行监视,并对不稳定的姿态状态进行补偿或控制,以实现飞行器的平稳、稳定地运行。
常见的姿态控制技术有PID反馈控制法、模型预测控制法、自适应控制法等。
PID控制法是一种传统的控制技术,通过对姿态转角误差、偏差和积分项等要素进行测算和控制,从而实现对飞行器姿态的控制。
模型预测控制法则是一种基于预测模型的控制技术,通过对飞行器状态和扰动进行预测,并对姿态进行补偿和控制,逐渐实现从预测精度转向实际精度的实时控制。
自适应控制法则通过对飞行器的复杂、不确定的动态特性进行建模和控制,实现了对飞行器姿态控制的更加高效和准确。
三、制导和姿态控制的结合制导与姿态控制两个技术的结合,协同作战,对飞行器的控制系统进行完美的设计和优化,不但可提高飞行器的性能和安全性,还能更好地适应不同的任务需求和环境变化。
飞行器控制系统设计与模拟
飞行器控制系统设计与模拟飞行器控制系统是航空领域中至关重要的一部分,它负责通过传感器和执行器实现对飞行器的控制和导航。
在本文中,将介绍飞行器控制系统的设计原理和模拟方法,以及在实际应用中的一些挑战和解决方案。
一、飞行器控制系统设计原理飞行器控制系统的设计原理可以分为三个主要部分:传感器、控制器和执行器。
1. 传感器传感器是飞行器系统中的关键组成部分,它通过感知环境中的物理量,并将其转化为电信号,以提供给控制器进行处理。
常见的飞行器传感器包括加速度计、陀螺仪、气压计、磁力计等。
加速度计用于测量线性加速度,可以帮助判断飞行器的姿态和运动状态;陀螺仪用于测量角速度,可以帮助判断飞行器的转动状态;气压计用于测量气压,可以帮助判断飞行器的高度;磁力计用于测量磁场强度,可以帮助判断飞行器的方向。
传感器的准确性对于飞行器的控制至关重要,因此在设计过程中需考虑噪声抑制和校准等因素。
2. 控制器控制器是飞行器控制系统的核心部分,它根据传感器提供的信息和预设的控制算法,通过计算和判断来生成相应的控制信号,以实现对飞行器的姿态和位置的控制。
常见的飞行器控制算法包括PID控制算法、状态反馈控制算法和模糊控制算法等。
PID控制算法是一种经典的控制算法,通过比较目标值和实际值的差异,根据比例、积分和微分三个参数来调整控制信号的大小。
状态反馈控制算法基于飞行器的数学模型,通过估计飞行器的状态变量并根据目标值进行调整。
模糊控制算法是一种基于模糊逻辑的控制算法,可以应对非线性和不确定性的飞行器控制问题。
3. 执行器执行器是控制器输出的信号在物理上作用于飞行器的装置,用于操纵飞行器的姿态和位置。
常见的飞行器执行器包括电动机、伺服阀和舵面等。
电动机通常用于控制飞行器的推力和动力系统;伺服阀用于控制飞行器的液压系统,如液压舵面和液压地平线;舵面用于控制飞行器的姿态变化,如副翼、升降舵和方向舵等。
执行器的稳定性和响应速度对于飞行器的控制效果至关重要,因此在设计过程中需考虑动力和机械的匹配和协调等因素。
飞行器姿态控制系统设计及仿真
飞行器姿态控制系统设计及仿真近年来,随着无人机技术的快速发展,飞行器姿态控制系统的设计和仿真成为了一个备受关注的领域。
飞行器姿态控制系统是无人机飞行过程中保持稳定的重要组成部分,它能够通过精确的姿态控制来实现飞行器的稳定飞行和各种机动动作。
本文将介绍飞行器姿态控制系统的设计原理和步骤,并通过仿真验证其性能。
一、飞行器姿态控制系统的设计原理飞行器姿态控制系统的设计原理主要基于控制理论和传感器技术。
控制理论提供了一种系统动力学建模和控制器设计的理论基础,而传感器技术能够提供准确的姿态信息,为控制系统提供反馈信号。
在飞行器姿态控制系统设计中,常用的控制方法包括PID控制和模型预测控制。
PID控制是一种经典的控制方法,通过测量当前状态与目标状态的误差,综合考虑比例、积分和微分三个部分,计算出控制输出。
模型预测控制则是基于飞行器的数学模型,通过预测未来一段时间内的状态变化,计算出最优的控制策略,从而实现姿态控制。
二、飞行器姿态控制系统的设计步骤1. 系统动力学建模飞行器姿态控制系统的设计首先需要进行系统动力学建模。
根据飞行器的物理特性和运动方程,建立数学模型。
常见的模型包括刚体模型、欧拉角模型和四元数模型。
选择合适的模型能够更好地描述飞行器的运动特性。
2. 控制器设计根据系统模型,选择适当的控制方法进行控制器设计。
常用的控制方法有PID控制和模型预测控制。
PID控制是一种简单而有效的方法,但对于复杂的飞行器姿态控制来说,模型预测控制能够提供更好的性能。
根据系统的需求和性能指标,设计合适的控制器参数。
3. 传感器选择飞行器姿态控制系统需要依赖传感器来获取准确的姿态信息。
常用的传感器包括加速度计、陀螺仪和磁力计等。
根据飞行器的需求和环境条件,选择合适的传感器,并进行校准和数据处理,以提供准确的姿态反馈。
4. 闭环控制设计好控制器和选择好传感器后,将其组合成一个闭环控制系统。
将传感器获取的姿态信息与目标姿态进行比较,计算出控制输出,通过执行机构来实现姿态控制。
四轴飞行器控制系统设计及其姿态解算和控制算法研究

本次演示提出的基于嵌入式的四轴飞行器控制系统架构由以下几个部分组成: 飞行器主体、传感器模块、嵌入式控制器、无线通信模块以及电源模块。其中, 飞行器主体负责产生升力和重力;传感器模块包括加速度计、陀螺仪和气压计等, 用于实时监测飞行状态;嵌入式控制器作为核心控制单元,负责处理传感器数据 并生成控制指令;无线通信模块用于传输控制指令和飞行状态数据;电源模块为 整个系统提供能量。
3、设计高效的执行器,实现了电机转速的准确控制。
参考内容二
引言
四轴飞行器是一种具有广泛应用前景的无人机,其控制系统对于飞行器的稳 定性和精度具有至关重要的作用。随着科技的不断进步,嵌入式技术逐渐成为四 轴飞行器控制系统的重要发展方向。本次演示将围绕基于嵌入式的四轴飞行器控 制系统展开研究与设计进行详细阐述。
在设计四轴飞行器姿态控制系统时,我们需要明确设计理念。在本设计中, 我们的主要目标是通过优化控制算法和提高硬件性能,实现飞行器的高精度和稳 定控制。为了达到这个目标,我们将采用以下措施:
1、采用先进的控制算法,如PID控制器和卡尔曼滤波器等,以增加系统的稳 定性和精度;
2、选择高性能的传感器和微处理器,以提高传感器数据的准确性和处理速 度;
1、实现方法
在实现基于嵌入式的四轴飞行器控制系统过程中,我们首先完成了硬件设备 的选型和搭建,然后编写了控制算法和通信协议。在调试过程中,我们通过连接 PC与嵌入式控制器,利用上位机软件实时监测飞行状态和调整控制参数。
2、实验结果
通过多次实验,我们发现该控制系统能够实现稳定的飞行,并且具有较强的 抗干扰能力。在控制算法方面,PID控制算法表现出了良好的性能,能够快速跟 踪期望轨迹,减小误差。此外,我们还对该系统的通信协议进行了测试,结果表 明通信模块工作正常,数据传输稳定可靠。
光学测量的飞行器空间姿态测量方法

( c o l f e t ia g n e i g a d Au o t n S h o c r l o El c En i e rn n t ma i ,Ha b n I s i t fTe h o o y,H a b n 1 0 0 ,Ch n ) o r i n t u e o c n l g t r i 5 0 1 ia
Ab ta t An i g n t o sn e u n i l c e n s o ma e e e a e y c o e r n e o tc l r c i g sr c : ma i g me h d u i g s q e t r e — p ti g s g n r t d b l s - a g p ia a k n a s t s p o o e o e tb d me s r m e to - ar r f a t e p r me e s r p s d f r t s e a u e n f3 D ic a t tiu a a t r .W ih t i e h d a e mit r td t h sm t o ,ls r e t e s
go al ai r t li ie t n l i h s e dc m e a n h ie ce n ,e tb ih n r n f r rl— l b l c l aemu t dr ci a g —p e a r sa d t efx ds r e s sa l ig ata so m ea y b — o h s
型 . 过 安 装 在 飞 行 器 表 面 的 激 光 发射 装置 向屏 幕 上 投 射 激 光 光 斑 的方 法 , 先用 激 光 跟 踪 仪 对 实 验 场 地 内 的多 方 通 首
飞行器三轴姿态测量方法

α文章编号:100127445(2004)增20060203飞行器三轴姿态测量方法海 涛,徐 嫣,高 翔(广西大学电气工程学院,广西南宁530004)摘要:介绍了到目前为止常用飞行器三轴姿态测量敏感器.详述了这些姿态敏感器的工作原理.根据这些原理分析了它们的优缺点,并比较了它们的性能指标.给出了具有指导意义的结论.关键词:姿态敏感器;太阳敏感器;红外地平仪;射频敏感器;惯性陀螺;磁强计;星敏感器中图分类号:T P 212.9 文献标识码:A姿态控制的前提是姿态敏感,即探测出飞行器的当时姿态.姿态敏感器是实现空间飞行器姿态测量与控制的仪器[1].确定飞行器姿态的一般方法是选择一个可靠的参考系.对于不同的参考系,所用的姿态敏感器的工作原理和所测量的对象是不同的,在工程上姿态敏感器的种类很多,这些敏感器利用光学原理、力学惯性原理、无线电测原理以及地球磁场原理设计的.按其基准方位分为如下五类[2]:(1)以地球为基准方位,有红外地平仪、地球反照敏感器等;(2)以天体为基准方位,有太阳敏感器、星敏感器等;(3)以惯性空间为基准方位,有陀螺仪、加速度计等;(4)以地面站为基准方位,有射频敏感器;(5)其它,如以地球磁场为基准方位的磁强计,以地貌为基准方位的陆际敏感器等.下面介绍三轴稳定空间飞行器最常用的几种姿态敏感器:太阳敏感器[3]、红外地球敏感器(红外地平仪)、射频敏感器、惯性敏感器(陀螺)、磁强计和星敏感器.1 太阳敏感器图1 太阳敏感器的测角原理图 太阳敏感器是通过对太阳光辐射的敏感来测量太阳视线与空间飞行器某一体轴之间的夹角的敏感器.太阳敏感器用来确定姿态最普遍,几乎每个飞行器都采用.太阳敏感器之所以有这样广泛的通用性是因为在大多数应用场合,可以把太阳近似看作点光源,因此就可简化敏感器的设计和姿态确定的算法;另外太阳光照度很强,从而使敏感器结构简单,其功率也很小;视场很大(从几分×几分到128°×128°)以及分辨率高(从几度到几角秒)的特点.太阳敏感器有三种类型:模拟式、数字式和(01)太阳指示式.经常使用的为模拟式和数字式两种.(1)模拟式太阳敏感器 模拟式太阳敏感器的输出信号为模拟量,其大小和符号是太阳光入射角的连续函数.模拟式太阳敏感器通常又称余弦检测第29卷增刊2004年9月广西大学学报(自然科学版)Journal of Guangxi U niversity (N at Sci Ed )V o l .29,Sup. Sep t .,2004 α收稿日期:20040520;修订日期:20040616作者简介:海 涛(1963),男,广西桂林人,广西大学高级工程师.器,这是因为硅太阳电池输出电流与太阳光入射角成正弦规律变化.模拟式太阳敏感器视场在几十度时,精度可达到0.5°;当视场很小,仅为1°~2°时,精度可达到秒级.例如“阿波罗”飞船所使用的模拟式太阳敏感器即属此类.(2)数字式太阳敏感器 数字式太阳敏感器的输出信号是与太阳入射角相关的以编码形式出现的离散函数(图1为太阳敏感器的测角原理图).图1左边是测量码盘,右边是指令码盘.码盘上、下两面都镀上不透光的金属模,并光刻成图中所示的图案.测量码盘的上表面有一个测量前缝,下表面左六道为格莱码,右边有一个全开码.太阳光通过前缝在格莱码图案上形成一条窄像.光像落在码道透明区时,光线便到达下面的太阳电池,经过线路处理为1,反之处理为0,我们利用这些0和1来测量姿态角.2 红外地球敏感器红外地球敏感器用来测量飞行器相对于地球的方位.地球大气二氧化碳层的14~16.25Λm 波段的红外能量辐射进入到地球敏感器视场,被热敏感元件(红外探头)接收并转换成代表地球波形的电信号,可以测量出当地垂线或地平方位,故称为红外地平仪.三轴稳定空间飞行器常用圆锥扫描式、摆动扫描式和辐射热平衡式三种类型的地球敏感器.圆锥扫描式发展较早,应用也较多.这种敏感器的优点是:扫描视场大,响应时间快,对于许多飞行任务适应性强,特别是对大范围姿态测量和姿态机动捕获更为合适.但由于存在运动扫描机构,因此寿命受到限制.这种敏感器的精度可达0.10°.辐射热平衡式地球敏感器不需要扫描机构,又称为静态红外地平仪.优点在于没有运动部件,体积和质量较小,功耗低,适合于长寿命飞行任务.但是,目前这种敏感器存在两个技术困难:仪器各部分之间的温度梯度所产生的热交换及季节变化所引起的地球红外辐射不均匀性和不平行性对测量精度产生严重影响.但目前技术有较大发展,如法国SOD EN 公司研制的SA T 04型敏感器用于T elecom 1卫星上,精度达到0.04°,运行寿命达7年.摆动扫描式地球敏感器分为单地平摆动扫描式和双地平摆动扫描式.其优点为:(1)由于对地球信号进行交流调制,减少了背景辐射和温度变化对探头的影响,从而降低了敏感器的误差;(2)对地球辐射的大范围变化不敏感,特别是视场扫描沿纬度方向,使纬度效应误差大大减少,从而降低了敏感器的系统误差;(3)由于敏感器选用了无摩擦的绕性轴承结构,因此使敏感器的可靠性及寿命大为提高.意大利伽利略公司生产的单地平摆动扫描式敏感器应用在同步轨道三轴稳定卫星O T S 上.敏感器运动部件由无刷电动机驱动,扫描频率为5H z ,寿命达八年以上(其中一个已经运行了十年),视场扫描范围为5°~10°,达到随机误差≤0.03°,系统误差≤0.03°的精度.我国“东方红三号”也选用这种敏感器.3 射频敏感器为了提高空间飞行器的姿态控制精度,姿态控制系统常采用两级测姿方式:对于有效载荷为通信天线的对象,可采取雷达原理和天线结合在一起的方式测量姿态,这就是射频敏感器,又称无线电敏感器.射频敏感器的精度高于红外地球敏感器.射频敏感器确定飞行器姿态的原理是基于飞行器的天线轴与目标无线电波瞄准线之间的夹角的测量.目前大多数采用两种形式:基于振幅定向法的比幅单脉冲射频敏感器和基于相位定向法的比相单脉冲的射频敏感器(又称干涉仪).射频敏感器也可用作指向参考,但如果要求高准确度的话,还需要一个指向天线.使用射频敏感器可以得到1角分的指向精度.这种敏感器非常适合通信卫星,因为通信卫星本身具有无线电电源信标.4 惯性姿态敏感器(陀螺)惯性导航系统(简称惯导系统,Inertial N avigati on System ,I N S )是一种利用加速度计测得的运载体的运动加速度、经过运算求出运载体即时位置的导航设备.实现此种导航定位计算所需的基准坐标16增刊海 涛等:飞行器三轴姿态测量方法26广西大学学报(自然科学版)第29卷 (导航坐标系)则依靠陀螺仪来建立.惯导系统可以工作两种不同的状态:第一种工作状态是向驾驶员提供运载体(舰船、飞机等)的位置与速度等导航参数,然后由驾驶员依据这些参数,靠人工将运载体按照预定的航线引导至目的地;第二种工作状态是在提供导航参数的基础上,通过控制系统将运载体自动地按照预定的航线至目的地,而驾驶员仅起监控作用.在无人操作的运载体(鱼雷、导弹、火箭等)上,惯性导航与自动控制相结合,将运载体自动导向预定的目标.惯导系统求得导航参数无需任何外界信息,而只依靠陀螺仪与加速度计这两种惯性仪表,因此是一种自主式的导航系统.这种系统不受外界的干扰,隐蔽性好.惯性系统还能方便地提供运载体的三维姿态参数,这些参数都是舰艇与飞机上观通系统和火控系统所必需的.惯性导航由于具有上述一系列优点而受到海陆空军、航天和交通运输等部门的青睐和重视.5 磁强计磁强计是以地球磁场为基准,测量航天器姿态的敏感器.磁强计本身是用来测量空间环境磁场强度和方向的仪器.由于空间每一位置的地球磁场强度都可以事先用地球磁位来确定,因此利用航天器上磁强计测得的信息便可以确定出星体相对于地球磁场的姿态.目前应用较多的是感应式磁强计,它是建立在法拉第磁感应定律的基础上的.法拉第电磁感应定律可以表示为:V=-N d5 d t,式中5为线圈中的磁通量;N为线圈的匝数;V为线圈的感应电势.感应式磁强计分为搜索线圈式磁强计和磁通门磁强计两种类型.前者用于自旋卫星上,依靠卫星的自旋使通过搜索线圈的地磁场磁通量作周期性的变化,并感应出一个周期性的交流电压,在此交流电压的相位包含了姿态的信息.也就是说搜索线圈式磁强计可用在自旋卫星上提供精密的相位信息.磁强计由于质量小、性能可靠、功耗低、工作温度范围宽以及没有活动部件而得到广泛应用.但是地球磁场模型仅仅是对地球磁场的近似描述,以此模型作为磁强计测量星体姿态的基准,将会带来较大的误差,因此磁强计不是一种高精度的姿态敏感器.另外,地球磁场强度是与地心距三次方成反比的,使得高轨道(高度大于1000公里)卫星内的剩余磁偏置将会超过地球磁场的影响.这时地球磁场便不能作为测量基准,使得磁强计的应用受到限制.本文综述了到目前为止出现的常用飞行器三轴姿态测量敏感器,并对它们的性能进行了分组分析比较,给出了具有一定指导意义的结论,对这一领域今后的研究工作具有启示作用.参考文献:[1] L iebe C C.Star trackers fo r attitude deter m inati on[J].IEEE A ES System s M agzine,1995,31(6):10216.[2] 黄圳圭.航天器姿态动力学[M].长沙:国防科技大学出版社,1997.1290.[3] 袁 信,俞济祥,陈 哲.导航系统[M].北京:航空工业出版社,1993.15247.The m ethod of m ea sur i ng a ttitude for aerocraf tHA I T ao,XU Yan,GAO X iang(Co llege of E lectrical Engineering,GuangxiU niversity,N anning530004,Ch ina)Abstract:T he sen so rs of m easu ring th ree axes attitude fo r aerocraft are p resen ted in the pap er.T he w o rk theo ry of sen so rs is then p resen ted in detail.T he advan tage and disadvan tage of these sen so rs are analyzed acco rding to their w o rk theo ry,at the sam e ti m e p erfo r m ance of som e comm on attitude sen so rs is com p ared.A t last som e conclu si on s are given.Key words:attitude sen so r;so lar sen so r;infrared earth sen so r.;radi o sen so r;inertial gyro m agnetom eter;star sen so r(责任编辑 刘海涛)。
飞行器姿态控制系统设计与实现
飞行器姿态控制系统设计与实现一、引言飞行器姿态控制是现代航空技术领域中的重要问题,它的实现涉及机械、电子、计算机、控制等多个学科的知识,因此具有一定的复杂性和专业性。
本文将探讨飞行器姿态控制系统的设计与实现过程,主要包括传感器选择、控制算法设计、模拟仿真及实验验证等方面的内容。
二、传感器选择姿态控制系统需要依靠传感器来获取姿态信息,目前常用的传感器有以下几种:1.加速度计:用于测量加速度,可以计算出飞行器的姿态角度。
2.陀螺仪:用于测量角速度,可以计算出飞行器的角位移。
3.磁力计:用于测量地磁场,可以用于判断飞行器的方向。
基于以上传感器,可以采用三轴组合(加速度计+陀螺仪+磁力计)的方式获取飞行器的姿态信息。
三、控制算法设计飞行器的姿态控制需要采用一定的控制算法,最常用的算法有以下几种:1.比例-积分-微分(PID)控制:根据误差的大小和变化率,调节控制量来达到稳定控制的目标。
该算法简单易懂,且可靠性高,适用于飞行器高精度控制场合。
2.自适应控制:根据系统状态和环境变化,自适应地调整控制参数,以实现智能化控制。
该算法具有适应性强、鲁棒性好的特点,但计算量较大。
3.模型预测控制:根据飞行器的数学模型,预测未来一段时间的姿态变化,并计算出最优控制量,以实现控制目标。
该算法精度较高,但对飞行器的模型要求较高。
四、模拟仿真为了验证控制算法的有效性,可以进行模拟仿真实验。
其中,MATLAB是一款常用的仿真软件,可以使用Simulink进行建模和仿真。
在仿真中,需要对飞行器的物理特性进行建模,包括飞行器的动力学模型、姿态控制系统模型等。
通过仿真实验,可以验证不同控制算法的控制效果,并进行优化。
五、实验验证模拟仿真只是一种理论上的验证方法,实验验证是解决实际问题的关键。
在实验中,需要借助实验平台进行实际验证,实验平台一般由飞行器物理平台和控制系统软件组成。
在实验中,需要进行传感器的校准和陀螺仪漂移的处理,以提高姿态控制的精度。
基于合作靶标的单目视觉测量系统
基于合作靶标的单目视觉测量系统摘要:飞行器位姿测量系统是飞行器测控的重要课题。
利用相机和计算机视觉原理进行位姿测量是众多测量方式中重要的一种,其具有信息充分、非接触、精度高、受测量环境影响小等特点,在米量级范围有着广泛的应用。
本文设计了一种基于特定靶标合作目标的单目视觉测量系统。
通过识别棋盘格靶标得到后续计算的特征点,经过计算可以得到被测目标的三维信息。
本文采用基于共面矩形特征的算法,可以确定距离和角度的唯一解;在靶标识别方面提出一种连续帧检测方法,可以解决棋盘格靶标角点对称带来的角点跳变问题。
搭建了三维精密位移台测试系统,研制了测量系统人机交互软件。
实验表明可以在300mm~1000mm内达到2mm精度,可以满足一种室内/舱内飞行器的位姿测量指标,其系统也可以应用到机器人自身位置确定、两个飞行器相对位置确定等场景,具有一定的实用价值。
关键词:单目视觉;棋盘格靶标;识别;测量1 引言飞行器位姿测量系统是飞行器测控的重要课题。
常用的测量方法包括雷达定位方法、激光测距方法、惯性导航方法等。
不同的方法有着不同的应用场景。
雷达定位方法、GPS方法都可以在远距离大范围内对飞行器目标的测量,但对于姿态信息测量不敏感,精度不高;基于加速度计陀螺的惯性导航方法只能对飞行器自身进行定位;视觉测量包含的信息丰富,适用于近距离的场景,在米级范围内能够有较高的位姿确定精度。
视觉测量分为合作目标和非合作目标两种。
测量合作目标时,可以在目标上安装特定尺寸和形状的靶标,利用单个相机即可确定距离和位姿信息。
单目视觉测量的核心问题是目标检测和位姿解算。
目标检测是检测出用于后期计算的特征点;位姿解算是指基于摄像机数学模型,建立空间目标特征与图像特征之间的对应投影关系,从而确定目标位姿信息的过程。
在目标检测方面,本文采用以棋盘格为靶标检测边界四个角点,从而将问题转化为以四点为特征点的类似P4P问题。
实验表明可以在300mm~1000mm内达到2mm精度,满足一种室内/舱内飞行器的位姿测量指标。
飞行器姿态测量系统设计
本系统采用 Cortex-M3 为内核的 STM32F103CBT6 单片机作为微控制器,由全球首 例整合 3 轴加速度计和 3 轴陀螺仪的运动处理组件作为惯性测量单元分别感应 x 轴、 y 轴、z 轴的角速度和重力加速度。论文分析了基于姿态四元数、一阶毕卡解法的捷 联惯导姿态确定方法、基于加速度计/陀螺仪的姿态确定方法,利用 Mahony 的互补 滤波函数对 MEMS 陀螺仪随机漂移误差进行了建模和补偿。
小型飞行器MEMS姿态测量系统

提供 运载 体 的姿态 信 息 , 态 测量 信息 是 小型 飞行 姿
器 自主飞行 的前提 条件 。随着微纳 米技术 的迅速发 展, 采用 ME MS技 术制造 的微 型陀螺 和微型 加速度 计 等 惯性 测 量 元 件 也 得 到 了快 速 发 展 。尽 管 当前
ME MS惯 性 器件 的测 量精 度 还 远不 能达 到惯性 级
接 口与 自驾仪 通信 , 供运 载体 的姿态信 息 。 提
单 轴 陀 螺
ADXR¥ 1 6 0
水 平 , 它在体 积 、 量 、 但 重 功耗 、 成本 等方 面的优势使
其在小 型飞行 器惯性 导航 中的应用 研究成为 近年来 被广 泛关 注 的 问题 。S h wn h I 1 出 一种 采 用 a a e _提 ADX 0 E 2 2 B和A R 1 0 B的ME DX S 5 E MS惯性 测量单 元 实 现 方案 , 可满 足 飞行 器加 速 度 小 于 2 角速 度
器 S TM3 F 0 C 3 2 1 3 B( 2位 内 核 ) 。系 统 采 用 3片
本文 针对 姿态 测量 系统构 成 、 MS惯 性传 感 ME
器 的选择 、 数测 试及姿态 计算 等几方 面进行研究 , 参 提 出了一种 用于小 型飞行 器 的捷 联姿态 测量系统 的
ADX S 1 R 6 0和 1片 MMA7 6 2 0实现 6 自由度 的惯 个
收 稿 日期 : 0 0 0 — 0 修 改 稿 收 到 日期 : 0 00 — 2 2 1—41 ; 2 1 — 8 2
第6 期
张 丽 杰 , : 型 飞 行 器 ME 等 小 MS姿 态 测 量 系 统
张丽 杰 ,常 佶
( 内蒙 古 工 业 大学 信 息 工 程 学 院 呼 和浩 特 , 10 1 005)
测绘技术中的飞行器姿态测量方法与误差控制

测绘技术中的飞行器姿态测量方法与误差控制近年来,随着航空技术的发展和无人机市场的兴起,飞行器姿态测量技术在测绘领域中扮演着重要的角色。
飞行器姿态测量是指测量飞行器在空中的方位、俯仰和横滚姿态参数,以获取空中目标的准确位置信息。
本文将重点探讨测绘技术中常用的飞行器姿态测量方法及其误差控制方法。
一、传统的飞行器姿态测量方法在传统的飞行器姿态测量方法中,陀螺仪、加速度计和磁力计是常用的传感器。
这些传感器可以感知飞行器在空中的方位、俯仰和横滚角度,从而提供准确的姿态信息。
陀螺仪主要用于测量飞行器的角速度,通过积分运算可以得到方位角;加速度计则用于测量飞行器的加速度,从而得到俯仰和横滚角度;磁力计则可以感知地球磁场,以辅助方位角的测量。
这些传感器通过互补滤波算法将各自的测量结果进行融合,得到更加准确的姿态参数。
然而,传统的飞行器姿态测量方法存在一定的局限性。
首先,陀螺仪存在漂移问题,长时间使用后会导致姿态测量的累积误差增大。
其次,加速度计对振动和重力变化非常敏感,导致姿态参数的测量精度不高。
磁力计则容易受到外界磁场干扰,进而影响姿态测量的准确性。
因此,为了提高飞行器姿态测量的准确性,需要采取一些误差控制方法。
二、误差控制方法为了控制飞行器姿态测量中的误差,可以采用如下方法:1. 零偏校正陀螺仪的漂移误差是影响姿态测量准确性的主要因素之一。
为了消除陀螺仪漂移误差,可以进行零偏校正。
零偏校正是通过测量陀螺仪在静止状态下的输出值,并将其作为零偏进行校正,从而消除测量误差。
2. 多传感器融合传统的飞行器姿态测量方法中采用了陀螺仪、加速度计和磁力计等多个传感器进行姿态测量。
利用这些传感器的测量信息,可以采用多传感器融合算法,将各个传感器的测量结果进行融合,从而得到更加准确的姿态参数。
常用的多传感器融合算法包括卡尔曼滤波器、粒子滤波器等。
3. 外部引导点为了进一步提高飞行器姿态测量的准确性,可以利用外部引导点或引导航标来辅助测量。
飞行器姿态控制系统的设计与分析
飞行器姿态控制系统的设计与分析飞行器姿态控制系统是现代航空领域的重要组成部分,它在飞行器的稳定性和精确控制方面发挥着关键作用。
本文将就飞行器姿态控制系统的设计和分析进行探讨,以便更好地理解其工作原理和应用。
首先,飞行器的姿态控制系统起到了维持飞行器稳定的重要作用。
在飞行中,飞行器会受到各种外界干扰力的影响,如气流、气跃、风切变等。
姿态控制系统通过传感器获取飞行器各个方向上的姿态参数,如滚转角、俯仰角和偏航角等,并将这些参数反馈给控制器。
控制器根据反馈信息对飞行器进行实时调整,以维持飞行器的平衡和稳定。
其次,飞行器姿态控制系统还可以确保飞行器精确地完成各种操纵任务。
在飞行器进行机动飞行、礼仪飞行或任务飞行时,姿态控制系统可以根据设定的操纵指令,调整飞行器的姿态,使其准确地执行所要求的飞行动作。
例如,在进行滚转操纵时,控制系统会向飞行器的滚转作动器发送指令,使其产生相应的滚转力矩,从而使飞行器按照设定的滚转角度进行旋转。
飞行器姿态控制系统的设计过程需要考虑多个关键因素。
首先,要根据飞行器的类型和任务需求选择合适的控制策略。
常见的控制策略包括经典PID控制、模糊控制和自适应控制等。
每种控制策略都有其优缺点,需要根据实际应用场景进行选择。
其次,还需要确定控制器的结构和参数。
控制器通常由比例环节、积分环节和微分环节组成,通过调整这些环节的增益来实现期望的控制效果。
同时,传感器选择和安装位置的确定也十分重要,不同的传感器对姿态参数的测量精度和响应速度有不同的要求。
最后,还需要进行系统的建模和仿真,以验证设计方案的可行性和稳定性。
飞行器姿态控制系统的分析旨在评估系统的性能和稳定性。
通常,可以通过仿真软件对飞行器姿态控制系统进行建模和仿真,以验证系统设计的可行性和性能。
例如,可以通过施加不同的控制指令和干扰力,评估系统对于不同工况的响应和鲁棒性。
此外,还可以通过频域分析和时域分析等方法对系统的稳定性进行评估。
例如,可以通过帕加洛夫稳定性准则检测系统是否存在振荡或发散的情况,从而采取相应的措施进行稳定性改进。
飞行器智能控制系统设计及实现

飞行器智能控制系统设计及实现飞行器主要由结构体、动力系统、飞行控制系统三大部分构成。
其中,飞行控制系统是飞行器的智能部分,起到控制飞行器飞行状态、姿态和运动轨迹等作用。
本文将详细介绍如何设计和实现一款高效稳定的飞行器智能控制系统。
一、控制系统的架构一个完整的控制系统主要由三个部分构成:传感器、控制算法和执行器。
传感器采集飞行器的数据并将其传递给控制算法处理,处理后的信息再通过执行器组件传递给飞行器实现相应的控制操作。
其中,控制算法是控制系统的核心部分,通过对传感器采集的数据进行处理,输出合适的控制指令,从而实现对飞行器的控制。
传感器部分主要包括:陀螺仪、加速度计、磁力计、气压计等。
陀螺仪用于测量飞行器的旋转速度和方向。
加速度计用于测量飞行器的加速度和倾斜角度。
磁力计用于测量飞行器周围的磁场,以帮助判断飞行器的朝向。
气压计主要用于测量飞行器的高度。
控制算法部分主要包括卡尔曼滤波、姿态控制算法、轨迹控制算法等。
卡尔曼滤波是一种优化算法,可用于处理传感器采集到的数据,提高控制系统的精度和稳定性。
姿态控制算法主要用于控制飞行器的姿态和角度等参数,以保持飞行器的稳定。
轨迹控制算法主要用于规划和控制飞行器的运动轨迹,以实现特定的航线和飞行任务。
执行器部分主要包括电机、飞行控制面等组件。
电机主要负责提供动力,控制电机速度实现对飞行器的控制。
飞行控制面主要包括舵面、襟翼等组件,通过改变控制面的角度和位置实现对飞行器姿态的控制。
二、控制系统的设计与实现(一)传感器数据的采集和处理首先需要选用合适的传感器采集飞行器的运动状态和姿态数据。
这里我们选用常见的MEMS传感器来实现数据采集。
传感器数据采集后,需要对其进行预处理,包括滤波、归一化、去噪等。
通常使用卡尔曼滤波算法对传感器采集的数据进行处理,以提高数据的精度和稳定性。
(二)姿态测量与控制姿态测量和控制是控制系统的重要组成部分。
传感器采集姿态数据后,需要使用姿态控制算法对数据进行处理,输出合适的控制指令,控制飞行器的电机和飞行控制面完成姿态控制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
是否引证:否
15.1%(2045)
是否引证:否
14.8%(1998)
是否引证:否
14.1%(1909)
是否引证:否
10.6%(1431)
是否引证:否
9.3%(1255)
是否引证:否
9.2%(1238)
是否引证:否
9.1%(1225)
是否引证:否
8.7%(1173)
知 国 中 “
是否引证:否
8.7%(1173)
总字数:9928
13.1%(1305)
系
统
是否引证:否
11.1%(1098)
是否引证:否
3.3%(332)
是否引证:是
2.1%(210)
是否引证:否
2.0%(194)
是否引证:否
1.6%(158)
是否引证:否
1.2%(117)
是否引证:否
- 1 -
MEMS技术的发展与应用 刘成刚; - 《济南职业学院学报》- 2007-02-28 9 现代军用导航技术 马超杰,林志丹 - 《航空科学技术》- 2005-08-30 10 应用于MEMS中多孔硅显微结构及绝热性能的研究 崔梦(导师:胡明) - 《天津大学硕士论文》- 2004-12-01 11 MPU-6050模块角度算法处理及在嵌入式中的应用 邱云平;伍宝玉; - 《江西科技学院学报》- 2014-06-15 12 一种微机电系统器件的建模与仿真 王航宇; - 《北京电子科技学院学报》- 2007-12-15 13 基于SOC的MEMS双轴式数显倾角仪的研究 李晓豁;赵悦;姜鹤;朱兴梅; - 《机械》- 2010-01-25 14 浅谈物联网的技术特点及其广泛应用 刘陈;景兴红;董钢; - 《科学咨询(科技·管理)》- 2011-09-05 15 物联网核心技术专利态势分析——以MEMS技术为例 张运鸿;张善杰; - 《物流科技》- 2012-05-10 16 基于物联网的传感技术 子丰; - 《射频世界》- 2010-02-01 17 物联网发展应用给经济社会带来的影响 刘立琦; - 《物联网技术》- 2011-07-15 18 物联网传感器技术探讨 杨剑波;谭茜; - 《电信网技术》- 2011-12-15 19 便携式野外电法仪器故障检测装置的硬件设计 刘华(导师:陈一平) - 《中南大学硕士论文》- 2012-05-01 20 基于Nios 的直流电机PWM调速系统设计 陶东娅(导师:杨马英;何剑春) - 《浙江工业大学硕士论文》- 2009-05-01 21 MEMS-IMU/卫星组合导航技术研究与试验 王柬(导师:孙付平) - 《解放军信息工程大学硕士论文》- 2008-04-20 22 微机电系统发展的新动向 苑国良 - 《世界制造技术与装备市场》- 2005-10-10 23 Power ME MS研究现状及展望 甘霖,李伟,杨灿军,刘宜胜,宋瑞银,黎嘉杰 - 《机床与液压》- 2004-09-30 24 微电子机械系统的发展与应用 胡雪梅;王宏颖; - 《西安航空技术高等专科学校学报》- 2006-05-20 25 微机电系统的研究及应用 丁群燕;曾鑫; - 《装备制造技术》- 2008-07-15 26 浅议微电子机械系统 白木,周洁 - 《中国机电工业》- 2002-06-20 27 微电子机械系统的研究进展 李炳乾,朱长纯,刘君华 - 《国外电子元器件》- 2001-01-22 28 微机械传动技术概述 乔绪维;辛洪兵; - 《机械传动》- 2010-11-15 29 GPS/INS组合导航系统研究 黄兵超(导师:李纲) - 《国防科学技术大学硕士论文》- 2010-11-01 30 MEMS的应用及发展前景 刘虹,刘洁,杨立峰 - 《云南电大学报》- 2003-09-30 31 捷联惯导系统姿态解算模块的实现 杜海龙;张荣辉;刘平;郑喜凤;贾宏光;马海涛; - 《光学精密工程》- 2008-10-15
是否引证:否
8.3%(1126)
是否引证:否
8.1%(1099)
是否引证:否
8.1%(1099)
网
是否引证:否
7.9%(1066)
”
是否引证:否
7.7%(1036)
大
是否引证:否
7.6%(1033)
- 3 -
学
是否引证:否
7否
7.4%(998)
是否引证:否
7.1%(958)
是否引证:否
6.5%(876)
是否引证:否
5.5%(748)
系
是否引证:否
5.2%(699)
统
是否引证:否
4.9%(663)
是否引证:否
是否引证:否
0.4%(44)
是否引证:否
0.4%(44)
是否引证:否
0.4%(44)
是否引证:否
0.4%(44)
系
统
是否引证:否
0.4%(36)
是否引证:否
0.3%(34)
是否引证:否
0.3%(32)
是否引证:否 总字数:13514
20.4%(2762)
是否引证:否
18.2%(2466)
- 《大学生论文联合比对库》- 2014-06-02 3 基于STM32的人体姿态检测系统的设计与研究 沈威 - 《大学生论文联合比对库》- 2014-05-14 4 基于车载传感器的路面质量监测系统的设计和实现 徐庆江(导师:彭刚) - 《华中科技大学硕士论文》- 2012-01-的电动车动力电池管理系统 张正扬(导师:刘方) - 《南京航空航天大学硕士论文》- 2013-12-01 7 智能无线供电系统的设计与制作 陈大柱 - 《大学生论文联合比对库》- 2014-05-15 8 基于STM32的远程网络控制 翁开涛 - 《大学生论文联合比对库》- 2014-05-20 9 嵌入式RFID读卡器和无源标签设计 贺超阳 - 《大学生论文联合比对库》- 2014-05-08 10 11072_080602_200906060128 陈鹏 - 《大学生论文联合比对库》- 2013-06-20 11 11072_080602_200906060128 - 《大学生论文联合比对库》- 2013-07-10 12 岩石破裂次声探测技术与信号特征研究 朱星(导师:许强) - 《成都理工大学博士论文》- 2014-04-15 13 朱明想-100509054014-蔬菜大棚智能控制系统 朱明想 - 《大学生论文联合比对库》- 2014-05-23 14 论文-朱明想 - 《大学生论文联合比对库》- 2014-06-13 15 03100618胡凯政(姚桂锦) - 《大学生论文联合比对库》- 2014-04-22 16 刘雨霆_10031127_石油管道管径测量设备控制电路的设计与编程、调试 刘雨霆 - 《大学生论文联合比对库》- 2014-06-19 17 12010093019-王其凡-单片机测速与语音提示系统的设计-初稿 王其凡 - 《大学生论文联合比对库》- 2014-05-23 18 12010093019_王其凡_单片机测速与语音提示系统的设计论文终稿 王其凡 - 《大学生论文联合比对库》- 2014-06-05 19 谢志伟_201030601773_基于以太网的太阳能电池监控系统的实现 谢志伟 - 《大学生论文联合比对库》- 2014-06-03 20 通信-3090731119-陈超凡 通信 - 《大学生论文联合比对库》- 2013-05-21 21 毕业设计论文-高海振 - 无附件 高海振 - 《大学生论文联合比对库》- 2013-05-31 22 黄雄_自动化102_徐致远 徐致远 - 《大学生论文联合比对库》- 2014-06-05 23 13262_080606_080110021129左浩 - 《大学生论文联合比对库》24 基于STM32F107VCT6平台的I~2C总线使用技术研究 胡洪坡;钱宗锋;郑建国;余大波; - 《山西电子技术》- 2013-10-15 25 基于ARMcortex的远程控制系统升级的设计与实现 邬锦彬 - 《大学生论文联合比对库》- 2014-05-29 26 微型四旋翼飞行器实验平台的设计 巨星(导师:郝真鸣) - 《河北大学硕士论文》- 2014-06-01 27 基于nRF24L01的主动式电子标签的设计 唐磋;章国安;张之江;袁桅; - 《微计算机信息》- 2010-02-15 28 基于ARM的汽车防酒后驾驶及防盗系统设计 杨志刚(导师:孟立凡) - 《中北大学硕士论文》- 2014-05-28 29 嵌入式系统中GPIO模拟SPI总线主/从双向通信的设计与实现 孙松; - 《自动化技术与应用》- 2007-10-25
知 国 中 “
[8692] [2] 脚注与尾注:0
网
检测结果 总文字复制比:37.1% 去除引用文献复制比:35.6% 单篇最大文字复制比:11.8% 重复字数: 总段落数: 指
去除本人已发表文献复制比:37.1%
” 大
[23442]
学 生
总字数:
单篇最大重复字数:
[2762]
前部重合字数:[1512]
疑似段落最大重合字数:[5505] 疑似段落最小重合字数:[3187]
疑似段落数:[2] 标: 剽窃观点 一稿多投 表格:0
后部重合字数:[7180] 剽窃文字表述 自我剽窃 过度引用 整体剽窃
论
文
重复发表
管
32.1%(3187) 40.7%(5505)
飞行器姿态测量系统设计_第1部分(总9928字) 飞行器姿态测量系统设计_第2部分(总13514字)
理
1. 飞行器姿态测量系统设计_第1部分
相似文献列表 文字复制比:32.1%(3187) 剽窃观点:(0) 1 基于GMR传感器的姿态测量系统设计 林亚坤(导师:钱正洪) - 《杭州电子科技大学硕士论文》- 2013-12-01 2 无人机姿态测量系统设计实现 穆振兴(导师:曾庆双) - 《哈尔滨工业大学硕士论文》- 2009-06-01 3 基于STM32的捷联惯性测量系统设计 姜建飞(导师:张永;马国梁) - 《南京理工大学硕士论文》- 2014-02-01 4 基于微控制器系统的照片彩显设计与实现 程山 - 《大学生论文联合比对库》- 2014-06-01 5 基于si4432的高性能无线收发系统设计 许永通(导师:冯涛) - 《杭州电子科技大学硕士论文》- 2013-12-01 6 基于STM32的MEMS惯性传感器姿态检测系统 潘昊 - 《大学生论文联合比对库》- 2013-05-15 7 基于MEMS技术的惯性测量器件及系统的发展现状和应用 文炜; - 《飞航导弹》- 2006-09-05