51单片机的一个IO口控制speaker发声
51单片机蜂鸣器的工作原理

51单片机蜂鸣器的工作原理蜂鸣器是一种常见的声音输出设备,广泛应用于各种电子产品中。
在51单片机中,蜂鸣器也被广泛使用,用于发出警报、提示和音乐等声音信号。
那么,51单片机蜂鸣器的工作原理是什么呢?一、蜂鸣器的基本原理蜂鸣器是一种由压电陶瓷材料制成的声音输出器件。
当在蜂鸣器的两个引脚上加上一定的电压时,压电陶瓷材料会产生机械振动,从而产生声音。
蜂鸣器的发声频率取决于电压信号的频率和振动器的特性。
二、51单片机蜂鸣器的接口在51单片机中,蜂鸣器通常通过一个IO口连接。
通过向该IO口输出高电平或低电平信号,可以控制蜂鸣器的开关状态,从而发出不同的声音。
三、蜂鸣器的工作方式1. 通过IO口控制在51单片机中,通过向蜂鸣器的接口引脚输出高电平或低电平信号,可以控制蜂鸣器的工作状态。
当向蜂鸣器接口输出高电平时,蜂鸣器处于工作状态,发出声音;当向蜂鸣器接口输出低电平时,蜂鸣器处于停止状态,不发出声音。
2. 软件控制除了通过IO口控制蜂鸣器的开关状态外,还可以通过软件控制蜂鸣器发出不同的声音。
通过改变蜂鸣器接口引脚的电平信号的频率和持续时间,可以发出不同频率和持续时间的声音信号。
四、51单片机蜂鸣器的应用1. 发出警报信号蜂鸣器可以被用于发出警报信号,用于提醒和警示。
例如,在安防系统中,当检测到入侵者或异常情况时,通过控制蜂鸣器发出警报声,以引起注意。
2. 提示和提示音蜂鸣器还可以用于发出各种提示和提示音。
比如,在电子设备中,当按下按钮或操作出现错误时,可以通过蜂鸣器发出滴滴声或警示声,以提醒用户。
3. 音乐播放通过控制蜂鸣器的频率和持续时间,可以模拟出一些简单的音乐。
虽然蜂鸣器的音质较差,但在一些简单的应用场景中,如游戏机、玩具等,仍然可以发挥一定的作用。
五、总结51单片机蜂鸣器的工作原理是通过控制IO口的电平信号来控制蜂鸣器的开关状态,进而发出不同的声音信号。
蜂鸣器可以应用于警报、提示和音乐等方面,为电子设备提供声音输出功能。
51单片机的IO口

51单片机的I O口.2P0口作为普通I/O口:①输出时,CPU发出控制电平"0"封锁"与"门,将输出上拉场效应管T1截止,同时使多路开关MUX把锁存器与输出驱动场效应管T2栅极接通。
故内部总线与P0口同相。
由于输出驱动级是漏极开路电路,若驱动NMOS或其它拉流负载时,需要外接上拉电阻。
P0的输出级可驱动8个LSTTL负载。
②输入时--分读引脚或读锁存器读引脚:由传送指令(MOV)实现;下面一个缓冲器用于读端口引脚数据,当执行一条由端口输入的指令时,读脉冲把该三态缓冲器打开,这样端口引脚上的数据经过缓冲器读入到内部总线。
读锁存器:有些指令如:ANLP0,A称为"读-改-写"指令,需要读锁存器。
上面一个缓冲器用于读端口锁存器数据。
*原因:如果此时该端口的负载恰是一个晶体管基极,且原端口输出值为1,那么导通了的PN结会把端口引脚高电平拉低;若此时直接读端口引脚信号,将会把原输出的"1"电平误读为"0"电平。
现采用读输出锁存器代替读引脚,图中,上面的三态缓冲器就为读锁存器Q端信号而设,读输出锁存器可避免上述可能发生的错误。
*说明:nP0口必须接上拉电阻;n在读信号之前数据之前,先要向相应的锁存器做写1操作的I/O口称为准双向口;n三态输入缓冲器的作用:n(ANLP0,A)准双向口:从图中可以看出,在读入端口数据时,由于输出驱动FET并接在引脚上,如果T2导通,就会将输入的高电平拉成低电平,产生误读。
所以在端口进行输入操作前,应先向端口锁存器写"1",使T2截止,引脚处于悬浮状态,变为高阻抗输入。
这就是所谓的准双向口。
2、P0作为地址/数据总线在系统扩展时,P0端口作为地址/数据总线使用时,分为:(1)P0引脚输出地址/数据信息:CPU发出控制电平"1",打开"与"门,又使多路开关MUX把CPU的地址/数据总线与T2栅极反相接通,输出地址或数据。
51单片机beep的用法

51单片机beep的用法51单片机是一种广泛应用于嵌入式系统中的微控制器,它具有体积小、功耗低、易于编程等优点,因此被广泛应用于各种电子设备中。
其中,beep是51单片机中常用的一个功能,它可以通过控制蜂鸣器发出不同的声音,用于提醒用户或作为设备的报警信号。
在51单片机中,beep的使用非常简单,只需要将蜂鸣器连接到单片机的IO口上,然后通过控制IO口的电平来控制蜂鸣器的发声。
具体来说,可以通过以下步骤来实现beep的使用:1. 首先,需要定义一个IO口来控制蜂鸣器,例如可以定义P1.5作为控制口。
sbit beep=P1^5;2. 然后,在程序中可以通过控制beep口的电平来控制蜂鸣器的发声。
例如,可以通过以下代码来让蜂鸣器发出一段短促的声音:beep=1; //控制beep口输出高电平delay(100); //延时一段时间beep=0; //控制beep口输出低电平delay(100); //延时一段时间3. 如果需要让蜂鸣器发出不同的声音,可以通过控制beep口的电平和延时时间来实现。
例如,可以通过以下代码来让蜂鸣器发出长时间的声音:beep=1; //控制beep口输出高电平delay(1000); //延时一段时间beep=0; //控制beep口输出低电平delay(1000); //延时一段时间4. 如果需要让蜂鸣器循环发出声音,可以通过使用循环语句来实现。
例如,可以通过以下代码来让蜂鸣器循环发出短促的声音:while(1) //循环执行{beep=1; //控制beep口输出高电平delay(100); //延时一段时间beep=0; //控制beep口输出低电平delay(100); //延时一段时间}51单片机beep的用法非常简单,只需要通过控制IO口的电平和延时时间来控制蜂鸣器的发声即可。
在实际应用中,可以根据需要来调整蜂鸣器的声音和频率,以实现不同的功能。
51单片机控制喇叭原理

51单片机控制喇叭原理让我们了解一下51单片机。
51单片机是一种常用的8位微控制器,具有高性能和低功耗的特点。
它被广泛应用于各种嵌入式系统中,包括电子设备、家用电器、汽车电子等。
51单片机具有丰富的外围接口和强大的计算能力,可以实现各种功能的控制。
在控制喇叭时,我们首先需要连接喇叭和51单片机。
通常情况下,喇叭的两个引脚分别连接到51单片机的IO口和GND(地)。
接下来,我们需要编写相应的程序来实现对喇叭的控制。
在51单片机中,我们可以使用C语言或汇编语言来编写程序。
下面我们以C 语言为例,介绍如何使用51单片机控制喇叭。
我们需要初始化相应的IO口。
在51单片机中,可以使用特定的寄存器来配置IO口的工作模式。
通过设置寄存器的值,我们可以将IO口设置为输出模式,以控制喇叭的状态。
接下来,我们可以使用51单片机的定时器来产生声音信号。
定时器是一种用于生成精确时间间隔的设备,可以用来产生各种信号。
在控制喇叭时,我们可以将定时器配置为产生特定频率的方波信号,从而产生相应频率的声音。
在产生方波信号时,我们需要设置定时器的计数值和工作模式。
通过调整计数值,我们可以改变方波信号的频率。
通过设置工作模式,我们可以将方波信号输出到相应的IO口上,从而控制喇叭的状态。
在程序中,我们可以使用循环语句来实现连续的声音输出。
通过不断改变方波信号的频率和持续时间,我们可以产生各种不同的声音效果。
除了控制声音的频率和持续时间,我们还可以通过调节方波信号的占空比来改变声音的音量。
占空比是指方波信号高电平的时间占整个周期的比例。
通过增大占空比,我们可以增加声音的音量;通过减小占空比,我们可以降低声音的音量。
在程序中,我们可以通过改变定时器的计数值和工作模式来调节方波信号的占空比,从而实现对声音音量的控制。
当我们完成程序编写后,就可以将程序下载到51单片机中,并连接喇叭进行实验。
通过调节程序中的参数,我们可以实现各种不同的声音效果。
单片机蜂鸣器发声代码

单片机蜂鸣器发声代码蜂鸣器是一种常见的电子元件,可以发出短促的蜂鸣声用于提醒或警示。
在单片机应用中,蜂鸣器可以用来作为声音提示的一种方式。
下面介绍一段单片机蜂鸣器的发声代码。
1. 引脚连接在使用单片机控制蜂鸣器发声之前,需要将蜂鸣器与单片机的引脚连接。
通常情况下,蜂鸣器有两个引脚,其中一个为正极,一个为负极。
将蜂鸣器的正极连接到单片机的一个IO口上,将负极连接到单片机的GND上。
2. 代码实现单片机发出频率为f的声音,需要将IO口以1/f的频率高低电平切换。
以下是一个基本的单片机蜂鸣器发声代码:#include 'reg51.h' //单片机头文件#define BEEP P1_5 //定义蜂鸣器连接的IO口void Delay(unsigned int Time) //延时函数{unsigned int i,j;for(i=Time;i>0;i--)for(j=110;j>0;j--);}void Beep(unsigned int Time) //发出一次蜂鸣声{BEEP = 0; //使IO口输出低电平Delay(Time); //延时BEEP = 1; //使IO口输出高电平Delay(Time); //延时}void main(void){while(1){Beep(100); //发出100ms的蜂鸣声}}在上述代码中,我们首先定义了蜂鸣器连接的IO口为P1_5,然后定义了一个延时函数Delay和一个发出蜂鸣声函数Beep。
Delay函数用于延时,Beep函数用于发出一次蜂鸣声。
在main函数中,我们使用一个while循环不停地发出蜂鸣声。
在Beep函数中,我们首先使IO口输出低电平,然后延时一段时间,再使IO口输出高电平,再延时一段时间,从而在IO口上形成一个频率为1/(2*Time)的方波信号,从而发出蜂鸣声。
3. 修改参数如果我们想要修改蜂鸣器发出的声音的频率和时长,只需要在Beep函数中修改Time的值即可。
51单片机IO口工作原理
51单片机IO口工作原理一、概述51单片机是一种广泛应用于嵌入式系统的微控制器,其IO口是其最基本和重要的功能之一。
IO口可以用于输入和输出信号,实现与外部设备的数据交互。
本文将详细介绍51单片机IO口的工作原理。
二、IO口的结构51单片机的IO口由多个引脚组成,每一个引脚都有特定的功能和工作模式。
通常,一个IO口引脚可以配置为输入模式或者输出模式,具体的配置由相应的寄存器控制。
三、IO口的输入模式当一个IO口引脚配置为输入模式时,它可以接收外部设备发送的信号。
在输入模式下,引脚的电平可以是高电平(1)或者低电平(0),这取决于外部设备发送的信号。
在51单片机中,可以通过P1口和P3口来配置引脚为输入模式。
当一个引脚配置为输入模式时,相应的寄存器会设置为1,表示该引脚为输入状态。
此时,我们可以通过读取相应的寄存器值来获取引脚的电平状态。
四、IO口的输出模式当一个IO口引脚配置为输出模式时,它可以向外部设备发送信号。
在输出模式下,引脚的电平可以是高电平(1)或者低电平(0),这取决于我们设置的值。
在51单片机中,可以通过P0口、P1口、P2口和P3口来配置引脚为输出模式。
当一个引脚配置为输出模式时,相应的寄存器会设置为0,表示该引脚为输出状态。
此时,我们可以通过写入相应的寄存器值来控制引脚的电平状态。
五、IO口的工作原理在51单片机中,IO口的工作原理是通过寄存器的读写操作来实现的。
通过读取或者写入相应的寄存器值,我们可以配置引脚的工作模式和控制引脚的电平状态。
对于输入模式,我们可以通过读取相应的寄存器值来获取引脚的电平状态。
通过读取P1口和P3口的寄存器值,我们可以判断引脚的电平是高电平还是低电平。
对于输出模式,我们可以通过写入相应的寄存器值来控制引脚的电平状态。
通过写入P0口、P1口、P2口和P3口的寄存器值,我们可以将引脚的电平设置为高电平或者低电平。
六、IO口的应用场景51单片机的IO口广泛应用于各种嵌入式系统中,如电子设备、家用电器、工业控制等。
51单片机控制喇叭(蜂鸣器)简单发声,频率可调

/*-----------------------------------------------------------------------------------------------------------------------------------*//*--*************************功能:【喇叭发出声音,频率可调】*********************--*//*--*************************芯片:【STC12C5A60S2】******************************--*//*--*************************说明:【频率500Hz,单次发声时长1s】******************--*//*--*************************控制:【每按下P1.0一次,喇叭发声1s,长按一直发声】**--*//*------------------------------------------------------------------------------------------------------------------------------------*//*头文件*/#include <reg52.h>#include <intrins.h>sbitControl_Key = P1^0; //定义控制独立按键P1.0,按下发声。
sbitSpeaker_port = P2^7; //定义喇叭控制端口unsigned intnum = 8; //num = (4 * 1000) / Frequency(500Hz) : 决定喇叭的响应周期,从而决定不同的频率unsigned int counter0 = 0; //T0控制频率unsigned int counter1 = 0; //T1控制时长unsigned char Juge_Start; //判断发声1s是否开始。
51单片机项目教程项目 5 蜂鸣器实验
图5- 9蜂鸣器实物结果
当SM0、SM1=01时,串行口设为方式1的双机串行通信。TXD脚和 RXD脚分别用于发送和接收数据。
5.2技术准备
方式1发送时,数据位由TXD端输出,发送一帧信息为10位:1位起始 位0,8位数据位(先低位)和1位停止位1。当CPU执行一条数据写 SBUF的指令,就启动发送。发送开始时,内部发送控制信号变为有 效,将起始位向TXD脚(P3.0)输出,此后每经过一个TX时钟周期, 便产生一个移位脉冲,并由TXD引脚输出一个数据位。8位数据位全部 发送完毕后,中断标志位TI置1。 方式1接收时(REN = 1),数据从RXD(P3.1)引脚输入。当检测到 起始位的负跳变,则开始接收。当一帧数据接收完毕后,同时满足以 下两个条件,接收才有效。 (1)RI = 0,即上一帧数据接收完成时,RI = 1发出的中断请求已被 响应,SBUF中的数据已被取走,说明“接收SBUF”已空。 (2)SM2 = 0或收到的停止位 = 1(方式1时,停止位已进入RB8), 则将接收到的数据装入SBUF和RB8(装入的是停止位),且中断标 志RI置“1”。
5.2技术准备
5.2.2 了解实验板蜂鸣器电路
图5- 3蜂鸣器电路
5.2技术准备
5.2.3 蜂鸣器驱动电路
蜂鸣器驱动电路如图5-4所示。
图5- 4蜂鸣器驱动电路
5.2技术准备
5.2.4串行口的结构
单片机串口结构如图5-5所示。有两个物理上独立的接收、发送缓冲器 SBUF(属于特殊功能寄存器),可同时发送、接收数据。控制寄存器共 有两个:特殊功能寄存器SCON和PCON。发送和接收引脚分别是TXD (P3.0)和RXD(P3.1)。
SM0 0 0 1 1 SM1 0 1 0 1 工作 方式 0 1 2 3 功能简介 移位寄存器 8位UART 9位UART 9位UART 比特率 OSC/12 可变 OSC/32或 OSC/64 可变
单片机蜂鸣器

单片机蜂鸣器(总5页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--实验原理51单片机的一个I/O口控制speaker发声,演唱祝你平安歌曲。
主要器件以及电路图单片机——AT89C51,蜂鸣器——speaker。
一、电磁式蜂鸣器驱动原理二、蜂鸣器发声原理是电流通过电磁线圈,使电磁线圈产生磁场来驱动振动膜发声的,因此需要一定的电流才能驱动它,单片机IO引脚输出的电流较小,单片机输出的TTL电平基本上驱动不了蜂鸣器,因此需要增加一个电流放大的电路。
S51增强型单片机实验板通过一个三极管C8550来放大驱动蜂鸣器,原理图见下面图三、如图所示,蜂鸣器的正极接到VCC(+5V)电源上面,蜂鸣器的负极接到三极管的发射极E,三极管的基级B经过限流电阻R1后由单片机的引脚控制,当输出高电平时,三极管T1截止,没有电流流过线圈,蜂鸣器不发声;当输出低电平时,三极管导通,这样蜂鸣器的电流形成回路,发出声音。
因此,我们可以通过程序控制脚的电平来使蜂鸣器发出声音和关闭。
四、五、程序中改变单片机引脚输出波形的频率,就可以调整控制蜂鸣器音调,产生各种不同音色、音调的声音。
另外,改变输出电平的高低电平占空比,则可以控制蜂鸣器的声音大小,这些我们都可以通过编程实验来验证。
;------------------------------------; 蜂鸣器演奏--祝你平安; 功能:蜂鸣器-蜂鸣器奏乐-祝你平安;------------------------------------SPK bitORG 0000HLJMP STARTORG 000BHINC 20H ;中断服务,中断计数器加1MOV TH0,#0D8HMOV TL0,#0EFH ;12M晶振,形成10毫秒中断RETISTART:MOV SP,#60H ;计数器中断初始化MOV TH0,#0D8HMOV TL0,#0EFHMOV TMOD,#01HMOV IE,#82HMUSIC0:NOPMOV DPTR,#DAT ;表头地址送DPTRMOV 20H,#00H ;中断计数器清0MOV B,#00H ;表序号清0MUSIC1:NOPCLR AMOVC A,@A+DPTR ;查表取代码JZ END0 ;是00H,则结束CJNE A,#0FFH,MUSIC5LJMP MUSIC3MUSIC5:NOPMOV R6,AINC DPTRMOV A,BMOVC A,@A+DPTR ;取节拍代码送R7MOV R7,ASETB TR0 ;启动计数MUSIC2:NOPCPL SPKMOV A,R6MOV R3,ALCALL DELMOV A,R7CJNE A,20H,MUSIC2 ;中断计数器(20H)=R7否?不等,则继续循环MOV 20H,#00H ;等于,则取下一代码INC DPTR; INC BLJMP MUSIC1MUSIC3:NOPCLR TR0 ;休止100毫秒MOV R2,#0DHMUSIC4:NOPMOV R3,#0FFHLCALL DELDJNZ R2,MUSIC4INC DPTRLJMP MUSIC1END0:NOPMOV R2,#64H ;歌曲结束,延时1秒后继续MUSIC6:MOV R3,#00HLCALL DELDJNZ R2,MUSIC6LJMP MUSIC0DEL:NOPDEL3:MOV R4,#02HDEL4:NOPDJNZ R4,DEL4NOPDJNZ R3,DEL3RETNOPDAT: ;祝你平安db 26h,20h,20h,20h,20h,20h,26h,10h,20h,10h,20h,80h,26h,20h,30h,20h db 30h,20h,39h,10h,30h,10h,30h,80h,26h,20h,20h,20h,20h,20h,1ch,20h db 20h,80h,2bh,20h,26h,20h,20h,20h,2bh,10h,26h,10h,2bh,80h,26h,20h db 30h,20h,30h,20h,39h,10h,26h,10h,26h,60h,40h,10h,39h,10h,26h,20h db 30h,20h,30h,20h,39h,10h,26h,10h,26h,80h,26h,20h,2bh,10h,2bh,10h db 2bh,20h,30h,10h,39h,10h,26h,10h,2bh,10h,2bh,20h,2bh,40h,40h,20h db 20h,10h,20h,10h,2bh,10h,26h,30h,30h,80h,18h,20h,18h,20h,26h,20h db 20h,20h,20h,40h,26h,20h,2bh,20h,30h,20h,30h,20h,1ch,20h,20h,20h db 20h,80h,1ch,20h,1ch,20h,1ch,20h,30h,20h,30h,60h,39h,10h,30h,10h db 20h,20h,2bh,10h,26h,10h,2bh,10h,26h,10h,26h,10h,2bh,10h,2bh,80h db 18h,20h,18h,20h,26h,20h,20h,20h,20h,60h,26h,10h,2bh,20h,30h,20h db 30h,20h,1ch,20h,20h,20h,20h,80h,26h,20h,30h,10h,30h,10h,30h,20h db 39h,20h,26h,10h,2bh,10h,2bh,20h,2bh,40h,40h,10h,40h,10h,20h,10h db 20h,10h,2bh,10h,26h,30h,30h,80h,00HEND ;程序结束。
基于51单片机的智能声光控开关毕业设计
基于51单片机的智能声光控开关毕业设计智能声光控开关是一种集声音和光线传感技术于一体的自动控制装置,能够通过声音和光线变化来实现开关的控制。
本文将围绕基于51单片机的智能声光控开关进行介绍,总结设计思路、实现方法和功能特点等方面内容。
首先,针对智能声光控开关的设计思路,我们需要考虑以下几个方面:1.声音传感器:通过选择合适的声音传感器来感知外界的声音变化。
可以选择一个高灵敏度的麦克风模块,能够准确地捕捉到声音的频率和强度。
2.光线传感器:用来感知环境光线的变化,可以选择一个光敏电阻模块,通过测量光敏电阻的电阻值来判断光线的亮度。
3.51单片机:作为控制中心,通过编程实现智能声光控开关的控制逻辑。
通过与传感器的通信和数据处理,实现根据声音和光线变化进行开关控制。
接下来,我们来介绍智能声光控开关的实现方法:1.硬件连接:将声音传感器和光线传感器与51单片机进行连接。
声音传感器通常需要一个模拟输入接口,而光线传感器可以选择模拟输入接口或数字输入接口。
2.传感器数据采集:通过编程配置51单片机的模拟输入口,并实现对声音传感器和光线传感器的数据采集。
可以通过ADC(模数转换器)将模拟信号转换为数字信号进行处理。
3.数据处理与控制逻辑:根据采集到的声音和光线数据,编写控制逻辑,实现智能声光控开关的功能。
例如,当声音强度超过一定阈值或光线强度低于一定阈值时,开关自动打开或关闭。
4.开关控制:通过编程配置51单片机的IO口,实现对开关的控制。
当满足开关条件时,将IO口拉高或拉低,来控制开关的状态。
最后,我们总结一下智能声光控开关的功能特点:1.自动感知:基于声音和光线传感技术,实现对外界环境的自动感知和控制。
不需要手动操作,提高了使用的便利性。
2.节能环保:根据光线的亮度自动调节开关的状态,合理利用自然光,降低能耗。
3.安全可靠:通过声音的监听,当有异常声音时,可以自动报警或进行其他安全措施,增加安全性。
4.可扩展性:基于51单片机的设计,可以根据需要进行功能扩展和升级,增加其他传感器模块或实现与其他设备的联动。
简易的单片机音乐控制
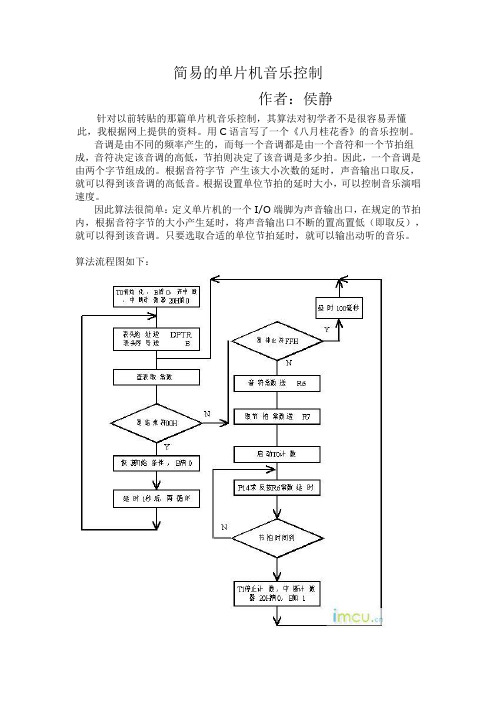
简易的单片机音乐控制作者:侯静针对以前转贴的那篇单片机音乐控制,其算法对初学者不是很容易弄懂此,我根据网上提供的资料。
用C语言写了一个《八月桂花香》的音乐控制。
音调是由不同的频率产生的,而每一个音调都是由一个音符和一个节拍组成,音符决定该音调的高低,节拍则决定了该音调是多少拍。
因此,一个音调是由两个字节组成的。
根据音符字节产生该大小次数的延时,声音输出口取反,就可以得到该音调的高低音。
根据设置单位节拍的延时大小,可以控制音乐演唱速度。
因此算法很简单:定义单片机的一个I/O端脚为声音输出口,在规定的节拍内,根据音符字节的大小产生延时,将声音输出口不断的置高置低(即取反),就可以得到该音调。
只要选取合适的单位节拍延时,就可以输出动听的音乐。
算法流程图如下://**********主程序*********#include<reg51.h>#include"SoundPlay.h"uchar data count=0;void init_com(){TMOD=0x01;TH0=0xff;TL0=0xff;EA=1;ET0=1;}void timer0(void) interrupt 1 using 3 {counter=counter+1;//节拍次数计数TH0=0xd8;//定义单位节拍的延时大小TL0=0xef;}void delay(uchar n){uchar i;while(n--)for(i=0;i<125;i++);//延时1毫秒}void sound_delay(uchar n){uchar i;while(n--){for(i=0;i<2;i++);}}void main(){uint i;uchar sound_signal;//定义音符大小uchar sound_pace;//定义节拍大小init_com()//array[i]=0x00 代表歌曲演唱完毕//array[i]=0xff 代表是休止符while(1){i=0;while(array[i]!=0x00){//如果是休止符,延时100ms,并终止本次循环,进入下一个循环 if(array[i]==0xff){TR0=0;i++;delay(100);continue;}//从表中取得音符大小sound_signal=array[i];i=i+1;//从表中取得节拍大小sound_pace=array[i];TR0=1;//当节拍数未达到时候,继续循环,产生该音调的声音while(counter!=sound_pace)0x20, 0x26, 0x20, 0x20, 0x20, 0x30, 0x80, 0xFF, 0x20, 0x20, 0x1C, 0x10, 0x18, 0x10, 0x20, 0x20, 0x26, 0x20, 0x2B, 0x20, 0x30, 0x20, 0x2B, 0x40, 0x20, 0x20, 0x1C, 0x10, 0x18, 0x10, 0x20, 0x20, 0x26, 0x20, 0x2B, 0x20, 0x30, 0x20, 0x2B, 0x40, 0x20, 0x30, 0x1C, 0x10, 0x18, 0x20, 0x15, 0x20, 0x1C, 0x20, 0x20, 0x20, 0x26, 0x40, 0x20, 0x20, 0x2B, 0x20, 0x26, 0x20, 0x20, 0x20, 0x30, 0x80, 0x20, 0x30, 0x1C, 0x10, 0x20, 0x10, 0x1C, 0x10, 0x20, 0x20, 0x26, 0x20, 0x2B, 0x20, 0x30, 0x20, 0x2B, 0x40, 0x20, 0x15, 0x1F, 0x05, 0x20, 0x10, 0x1C, 0x10, 0x20, 0x20, 0x26, 0x20, 0x2B, 0x20, 0x30, 0x20, 0x2B, 0x40, 0x20, 0x30, 0x1C, 0x10, 0x18, 0x20, 0x15, 0x20, 0x1C, 0x20, 0x20, 0x20,用单片机控制蜂鸣器放音乐悬赏分:0 - 解决时间:2008-11-25 14:44下面的程序怎么理解,数组是怎么得到的#include "reg51.h"unsigned char Count;sbit FMQ =P3^5 ; //蜂鸣器控制脚unsigned char code SONG[] ={0x26,0x20,0x20,0x20,0x20,0x20,0x26,0x10,0x20,0x10,0x20,0x80, 0x26,0x20,0x30,0x20,0x30,0x20,0x39,0x10,0x30,0x10,0x30,0x80, 0x26,0x20,0x20,0x20,0x20,0x20,0x1c,0x20,0x20,0x80,0x2b,0x20, 0x26,0x20,0x20,0x20,0x2b,0x10,0x26,0x10,0x2b,0x80,0x26,0x20, 0x30,0x20,0x30,0x20,0x39,0x10,0x26,0x10,0x26,0x60,0x40,0x10, 0x39,0x10,0x26,0x20,0x30,0x20,0x30,0x20,0x39,0x10,0x26,0x10, 0x26,0x80,0x26,0x20,0x2b,0x10,0x2b,0x10,0x2b,0x20,0x30,0x10, 0x39,0x10,0x26,0x10,0x2b,0x10,0x2b,0x20,0x2b,0x40,0x40,0x20, 0x20,0x10,0x20,0x10,0x2b,0x10,0x26,0x30,0x30,0x80,0x18,0x20, 0x18,0x20,0x26,0x20,0x20,0x20,0x20,0x40,0x26,0x20,0x2b,0x20, 0x30,0x20,0x30,0x20,0x1c,0x20,0x20,0x20,0x20,0x80,0x1c,0x20, 0x1c,0x20,0x1c,0x20,0x30,0x20,0x30,0x60,0x39,0x10,0x30,0x10,0x20,0x20,0x2b,0x10,0x26,0x10,0x2b,0x10,0x26,0x10,0x26, 0x10,0x2b,0x10,0x2b,0x80,0x18,0x20,0x18,0x20,0x26,0x20,0x20, 0x20,0x20,0x60,0x26,0x10,0x2b,0x20,0x30,0x20,0x30,0x20,0x1c, 0x20,0x20,0x20,0x20,0x80,0x26,0x20,0x30,0x10,0x30,0x10,0x30, 0x20,0x39,0x20,0x26,0x10,0x2b,0x10,0x2b,0x20,0x2b,0x40,0x40, 0x10,0x40,0x10,0x20,0x10,0x20,0x10,0x2b,0x10,0x26,0x30,0x30,0x80,0x00,};void Time0_Init() //定时器0初始化函数{TMOD = 0x01; //工作模式选择IE = 0x82; //中断设置TH0 = 0xD8; //装初值TL0 = 0xEF; //12MZ晶振,10ms}void Time0_Int() interrupt 1 //定时器0中断子函数{TH0 = 0xD8;TL0 = 0xEF;Count++; //长度加1}void Play_Song(unsigned char i){unsigned char Temp1,Temp2;unsigned int Addr;Count = 0; //中断计数器清0 Addr = i * 217;while(1){Temp1 = SONG[Addr++];if ( Temp1 == 0xFF ) //休止符{TR0 = 0;Delay_xMs(100);}else if ( Temp1 == 0x00 ) //歌曲结束符{return;}else{Temp2 = SONG[Addr++];TR0 = 1;while(1){FMQ = ~FMQ;Delay_xMs(Temp1);if ( Temp2 == Count ){Count = 0;break;}}}}}问题补充:谢谢你,我已经自己编出来了,恩,你说的问题确实是延时定义有问题。
单片机实现喇叭音调控制课程设计
【摘要】单片机是单片微型计算机的简称。
单片机微控制器就是把中央处理单元、存储器和输入/输出口等全部放置在一个芯片里,再配置几个小零件,如电容、电阻、石英晶体等,即可形成完整的微型计算机,因此单片机整个那个的体积小、成本低、可靠度高,是目前微型计算机控制系统的主流。
所以说利用单片机开发项目,既简单又经济实惠。
尤其对于中、小规模的电路设计来说,单片机最为合适。
由于微控制器的主要功能是控制,所有的部件都连接在三大总线上面,各部件之间的数据和信号都通过总线传送。
总线包括数据总线(DB)、控制总线(CB)和地址总线(AB)。
数据总线用于为处理器和存储器之间以及微处理和输入/输出接口之间传送数据。
数据总线是双向的,即数据可以从CPU传送至存储器或外部设备中,也可以从存储器或外部设备中传送至CPU。
计算机对存储器或外部设备的访问都是通过地址来进行的。
地址总线是单向的,即只能由CPU向外传送地址信息,其地址总线的数目决定了可以直接访问的存储器的单元数量。
控制总线用来传送CPU送出的控制信号,也可以传送其他外部设备输入到CPU的信号。
本次单片课程音频控制设计中,单片机选用MCS-51系列中的8031芯片、译码器选用74LS373、扩展的程序存储器选用2632(4k)、数据存储器选用6164(8k)、I/O接口扩展选用8255芯片,设计出电路图,将硬件连接好后,编译相应程序,来控制喇叭的音频变化和时间长短变化。
关键字:单片机存储器 8255芯片三大总线音频控制目录摘要 (1)引言 (3)第1章电路图及硬件连接 (3)1.1 复位电路和时钟电路设计 (3)1.2 控制P10口输出电路图及硬件连接 (4)1.3 扩展存储器、8255后电路图、硬件连接及地址计算 (4)第2章程序设计 (6)2.1 程序流程图 (6)2.2 控制P10口输出单频率音调的程序及实验分析 (6)2.3 控制P10口输出多频率音调的程序及实验分析 (7)2.4 控制8255PC端口音频输出程序及实验分析 (9)2.5 控制8255PA端口音频输出程序及实验分析 (11)第3章课程设计总结 (13)3.1 课程设计总结 (13)3.2 关于本次课设的心得体会 (13)参考文献 (14)附:图4 (15)引言用单片机实现对喇叭不同音调的控制,其实是由单片机(8031)输出一定频率的脉冲信号来驱动喇叭。
51单片机io口的用法

51单片机io口的用法51单片机是一种经典的单片机系列,广泛应用于各种嵌入式系统中。
其IO口是单片机最基本的输入输出功能,可以用来连接外部设备和实现与外界的交互。
本文将介绍51单片机IO口的用法,并提供相关参考内容,帮助读者更好地理解和应用。
一、51单片机IO口简介51单片机的IO口是通过P0、P1、P2、P3四个寄存器来控制的。
其中P0口为8位双向I/O口,P1、P2、P3口为8位I/O 口,可以通过配置将其设置为输入(IN)或输出(OUT)模式。
在51单片机中,IO口的状态(高电平或低电平)决定了其在电路中的功能。
二、IO口的输入模式通过将IO口设置为输入模式,可以实现对外部信号的读取。
以下是51单片机IO口输入模式的几种常见应用:1. 按键输入:通过将IO口与按键连接,读取按键的状态(按下或松开)。
2. 传感器输入:通过将IO口与传感器连接,读取传感器的输出信号,如光线强度、温度等。
3. 外部信号输入:通过将IO口与其他设备连接,读取外部设备的状态或数据。
在使用IO口作为输入时,需要设置对应端口的引脚为输入模式,并读取相应寄存器的值进行判断。
三、IO口的输出模式通过将IO口设置为输出模式,可以实现对外部设备的控制。
以下是51单片机IO口输出模式的几种常见应用:1. LED显示:通过将IO口与LED连接,控制LED的闪烁、亮灭。
2. 电机驱动:通过将IO口与电机驱动芯片连接,控制电机的转动方向、速度。
3. 继电器控制:通过将IO口与继电器连接,控制继电器的开关状态。
在使用IO口作为输出时,需要设置对应端口的引脚为输出模式,并将相应寄存器的值设置为高电平或低电平。
四、IO口的控制方法有两种常见的方式可以控制51单片机的IO口:位操作和寄存器读写。
1. 位操作:通过对相应寄存器的位进行操作来控制IO口的状态。
例如,要将P1口的第0位设置为高电平,可以使用以下代码:P1_0 = 1;要将P1口的第1位设置为低电平,可以使用以下代码:P1_1 = 0;2. 寄存器读写:通过读写相应寄存器的值来控制IO口的状态。
基于51单片机控制的ISD4004语音模块引脚电平触发发音程序
uchar second_count=170,msecond_count=0;
//second_count为芯片录音的起始地址,起始地址本来是A0,也就是160,
//我们从170开始录音吧。
#define Busy 0x80 //用于检测LCM状态字中的Busy标识
// ISD4004控制口定义:
sbit SS =P1^0;//4004片选
sbit MOSI=P1^1;//4004数据输入
sbit MISO=P1^2;//4004数据输出
sbit SCLK=P1^3;//ISD4004时钟
sbit INT =P1^4;//4004中断
sbit STOP=P3^4;//4004复位
DisplayOneChar( 0,12,'-');
DisplayOneChar( 0,13,'X');
sbit LED1 =P1^6;//录音指示灯
//===============================LCD1602接口定义=====================
/*注意,P2.2到P2.4需要接上拉电阻
---------------------------------------------------
sbit K6= P3^3; //
sbit K7= P3^5; //
sbit K8= P3^6; //
sbit K9= P3^7; //
////////////////////////////////////////////////
void main(void)
用单片机实现电子音调的发声
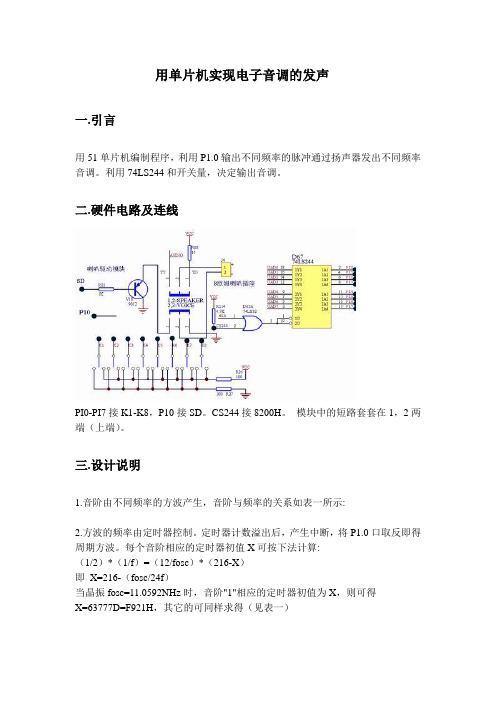
用单片机实现电子音调的发声一.引言用51单片机编制程序,利用P1.0输出不同频率的脉冲通过扬声器发出不同频率音调。
利用74LS244和开关量,决定输出音调。
二.硬件电路及连线PI0-PI7接K1-K8,P10接SD。
CS244接8200H。
模块中的短路套套在1,2两端(上端)。
三.设计说明1.音阶由不同频率的方波产生,音阶与频率的关系如表一所示:2.方波的频率由定时器控制。
定时器计数溢出后,产生中断,将P1.0口取反即得周期方波。
每个音阶相应的定时器初值X可按下法计算:(1/2)*(1/f)=(12/fosc)*(216-X)即X=216-(fosc/24f)当晶振fosc=11.0592NHz时,音阶"1"相应的定时器初值为X,则可得X=63777D=F921H,其它的可同样求得(见表一)表一:(单位:Hz,X为十六进制)3. 音的节拍由延时子程序来实现。
延时子程序实现基本延时时间,节拍值只能是它的整数倍。
4. 做此实验时,八位开关K1~K8均拨在下端,运行时,从左至右依次拨动K1~K8至上端,扬声器会发出1234567i。
四.实验程序框图五.汇编程序:PI EQU 8200H ;开关输入口地址ORG 0000HLJMP STARTORG 000BH ;T0 中断程序入口地址LJMP INT_T0ORG 0040HSTART:MOV SP,#60HMOV TMOD,#01H ;T0 方式1CLR TR0 ;关T0SETB ET0SETB EA ;开中断READ:MOV DPTR,#PIMOVX A,@DPTR ;读开关值MOV R1,AMOV R0,#08H ;置计数器初值MOV A,#01H ;置比较初值KEY:ANL A,R1JZ SOUND ;比较开关值RL A ;改变比较值DJNZ R0,KEYCLR TR0 ;开关未拨,不发声SJMP READSOUND:DEC R0MOV A,R0ADD A,R0 ;产生表格偏移量MOV R0,AMOV DPTR,#FREQUENCY ;置表格起始值MOVC A,@A+DPTRMOV R7,A ;查表,将结果存入公用寄存器R6,R7 MOV A,R0INC AMOVC A,@A+DPTRMOV R6,ASETB TR0 ;T0 允许SJMP READINT_T0: CLR TR0 ;T0 关闭CPL P1.0 ;产生波形MOV TH0,R7 ;重载定时器MOV TL0,R6SETB TR0 ;T0 允许RETI; 音阶频率表FREQUENCY:DB 0FCH,8FH,0FCH,5BH,0FBH,0E9H,0FBH,68H ;i,7,6,5 DB 0FAH,0D8H,0FAH,8CH,0F9H,0E1H,0F9H,21H ;4,3,2,1 END。
51单片机io口的用法

51单片机是一种常用的微控制器,它的IO口是用来控制外部设备的输入输出口,可以通过编程控制IO口的状态,实现对外设的控制。
下面是51单片机IO口的一些基本用法:
1. 输入口:可以读取外部设备的状态,通常需要连接外部开关、传感器等设备。
在程序中,需要将输入口设置为输入模式,并使用适当的读取指令(如INC、DEC、SBI、CBI等)读取输入口的状态。
2. 输出口:可以控制外部设备的状态,通常需要连接LED灯、电机、继电器等设备。
在程序中,需要将输出口设置为输出模式,并使用适当的写入指令(如MOV、AND、ORR等)设置输出口的状态。
3. 中断口:可以在外部设备发生变化时触发中断,通常需要连接外部中断源,如按键、传感器等设备。
在程序中,需要将中断口设置为中断模式,并编写中断服务程序,以响应中断事件。
4. P0口和P2口:是51单片机中两个常用的IO口,P0口有8个引脚,P2口有4个引脚,通常可以通过设置端口的方式,将多个IO口连在一起,以实现更多的功能。
5. 外部中断:可以在外部设备发生变化时触发中断,通常需要连接外部中断源,如按键、传感器等设备。
在程序中,需要将外部中断设置为触发方式,并编写中断服务程序,以响应中断事件。
需要注意的是,在使用51单片机IO口时,需要注意端口的电平状态,避免出现电平冲突或误操作等问题。
同时,也需要根据具体的应用场景选择合适的IO口和控制方式,以满足系统的需求。
单片机蜂鸣器工作原理

单片机蜂鸣器工作原理蜂鸣器是一种常见的声响器件,广泛应用于各种电子设备中,其中包括单片机系统。
在单片机系统中,蜂鸣器通常被用来发出警报、提醒或者指示某种状态。
本文将介绍单片机蜂鸣器的工作原理,帮助读者更好地理解其工作方式和应用。
蜂鸣器是一种能够将电能转换为声音能的电子元件。
它通常由振膜、震荡片和震荡腔组成。
当电流通过蜂鸣器时,振膜会受到电磁力的作用而振动,从而产生声音。
在单片机系统中,蜂鸣器通常被连接到单片机的IO口上,通过控制IO口的高低电平来控制蜂鸣器的发声。
单片机蜂鸣器的工作原理可以简单描述为,当IO口输出高电平时,蜂鸣器通电,振膜受到电磁力作用而振动,产生声音;当IO口输出低电平时,蜂鸣器断电,振膜停止振动,声音停止。
通过控制IO口的高低电平,单片机可以实现对蜂鸣器的音频控制。
在实际应用中,单片机蜂鸣器通常被用来发出不同频率和时长的声音,以实现不同的警报、提醒或指示功能。
通过控制IO口输出的高低电平的时间间隔和频率,可以发出不同的声音信号。
比如,可以通过一定的算法控制蜂鸣器发出不同音调的声音,从而实现不同的音乐效果。
除了基本的发声功能外,单片机蜂鸣器还可以与其他传感器或模块配合使用,实现更加丰富的功能。
比如,可以通过单片机读取温湿度传感器的数据,然后根据数据的不同值控制蜂鸣器发出不同的警报声音,以实现温度或湿度报警功能;或者可以通过单片机接收无线模块的数据,然后根据接收到的数据控制蜂鸣器发出不同的提醒声音,以实现远程控制提醒功能。
总之,单片机蜂鸣器是一种常用的声响器件,其工作原理简单直观,通过控制IO口的高低电平可以实现对蜂鸣器的音频控制。
在单片机系统中,蜂鸣器通常被用来发出警报、提醒或者指示某种状态,通过与其他传感器或模块配合使用,可以实现更加丰富的功能。
希望本文能帮助读者更好地理解单片机蜂鸣器的工作原理和应用。
基于51单片机蜂鸣器发声的-C语言程序
{
BEEP=~BEEP;
DelayMS(t);
}
BEEP=0;
}
void main()
{
P1=0xff;
BEEP=0;
while(1)
{
if(K1==0) Play(1);
if(K2==0) Play(2);
if(K3==0) Play(3);
if(K4==0) Play(4);
}
}
播放音乐
/*名称:播放音乐
说明:程序运行时播放生日快乐歌,未使用定时器中断,所有频率完全用延时实现
*/
#include<reg51.h>
#define uchar unsigned char
#define uint unsign7;
//生日快乐歌的音符频率表,不同频率由不同的延时来决定
for(k=0;k<SONG_TONE[i]/3;k++);
}
DelayMS(10);
i++;
}
}
void main()
{
BEEP=0;
while(1)
{
PlayMusic(); //播放生日快乐
DelayMS(500); //播放完后暂停一段时间
}
}
按键发音
/*名称:按键发音
说明:按下不同的按键会是SOUNDER发出不同频率的声音。本例使用延时函数实现不同频率的声音输出,以后也可使用定时器
*/
#include<reg51.h>
#define uchar unsigned char
#define uint unsigned int
单片机扬声器发声原理

单片机扬声器发声原理《单片机扬声器发声原理》嘿,你有没有想过咱们那些小巧玲珑的单片机是怎么让扬声器发出声音的呀?今天呀,我就来给你唠唠这个挺有趣的事儿。
咱们先来说说单片机,它就像是一个小小的智能指挥官。
你可以把它想象成一个超级迷你的大脑,虽然小,但是本事可不小呢。
它能够处理各种各样的信息,然后告诉其他部件该做什么。
那扬声器又是啥呢?扬声器就像是一个小嘴巴,专门负责把声音给“说”出来。
不过它可不能自己随便发声,得听单片机这个指挥官的话。
那单片机是怎么让扬声器发声的呢?这里面就涉及到一些挺好玩的原理啦。
首先呢,单片机要产生一种特殊的信号,这个信号叫脉冲宽度调制信号,咱们就简称PWM信号吧。
这个PWM信号就像是一种特殊的密码,它是由高电平和低电平按照一定的规律组合而成的。
你可以把高电平想象成是1,低电平想象成是0,就像我们计算机里的二进制一样。
比如说,一会儿是1,一会儿是0,这样按照一定的节奏排列起来,就成了这个特殊的密码信号。
那这个节奏有多快呢?一般来说,这个频率是可以调整的,就像我们唱歌的时候可以调整节奏快慢一样。
然后呢,这个PWM信号就被送到一个电路里,这个电路就像是一个翻译官。
它的任务就是把这个PWM信号翻译一下,变成一种能让扬声器理解的能量形式。
这个电路里面有一些电子元件,像是电阻、电容之类的,它们就像是一群小助手,互相配合着来完成这个翻译工作。
接下来呀,经过翻译之后的信号就到了扬声器这里。
扬声器里面有一个小线圈,这个小线圈就像是一个小小的魔法棒。
当有电流通过这个小线圈的时候,就会产生磁场。
这个磁场可就厉害了,它会和扬声器里面的一个永磁体互相作用。
就好像是两个小磁铁,一个固定着,一个可以动,它们互相推来推去的。
这个小线圈连着一个小纸盆,小纸盆就像一个小鼓面。
当小线圈在磁场里被推来推去的时候,就会带动小纸盆也动起来。
小纸盆这么一动呀,就会压缩周围的空气,空气就像一群小调皮,被压缩之后就会跑来跑去,这样就产生了声波,我们就听到声音啦。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
51单片机的一个I/O口控制speaker发声,演奏老鼠爱大米。
主要器件以及电路图
单片机——AT89C51,蜂鸣器——speaker。
C语言程序源码
C语言的程序代码更好读一些,相比较前面两个汇编的蜂鸣器程序,这个程序比较好理解。
/* 蜂鸣器--蜂鸣器奏乐-老鼠爱大米*/
#include
#define uint unsigned int
#define uchar unsigned char
#define ulong unsigned long
sbit beep=P2^7; //蜂鸣器输出引脚
uchar th0_f; //中断装载T0高8位
uchar tl0_f; //T0低8位
uchar code freq[36*2]={ //音阶码表0xf7,0xd8, //440hz , 1 //0
0xf8,0x50, //466hz , 1# //1
0xf8,0xbc, //494hz , 2 //2
0xf9,0x26, //524hz , 2# //3
0xf9,0x85, //554hz , 3 //4
0xf9,0xe5, //588hz , 4 //5
0xfa,0x3d, //622hz , 4# //6
0xfa,0x92, //660hz , 5 //7
0xfa,0xdd, //698hz , 5# //8
0xfb,0x29, //740hz , 6 //9
0xfb,0x70, //784hz , 6# //10
0xfb,0xb0, //830hz , 7 //11
0xfb,0xef, //880hz , 1 //12
0xfc,0x29, //932hz , 1# //13
0xfc,0x62, //988hz , 2 //14
0xfc,0x95, //1046hz, 2# //15
0xfc,0xc7, //1108hz, 3 //16
0xfc,0xf5, //1174hz, 4 //17
0xfd,0x20, //1244hz, 4# //18
0xfd,0x4c, //1318hz, 5 //19
0xfd,0x72, //1396hz, 5# //20
0xfd,0x97, //1480hz, 6 //21
0xfd,0xbb, //1568hz, 6# //22
0xfd,0xdc, //1662hz, 7 //23
0xfd,0xfb, //1769hz, `1 //24
0xfe,0x18, //1864hz, `1# //25
0xfe,0x34, //1976hz, `2 //26
0xfe,0x4e, //2092hz, `2# //27
0xfe,0x67, //2218hz, `3 //28
0xfe,0x7d, //2350hz, `4 //29
0xfe,0x94, //2488hz, `4# //30
0xfe,0xa8, //2639hz, `5 //31
0xfe,0xbc, //2794hz, `5# //32
0xfe,0xcf, //2960hz, `6 //33
0xfe,0xe0, //3136hz, `6# //34
0xfe,0xf1, //3322hz, `7 //35
};
uchar code diaodata[30]={ //音调代码0x10,0x0e,0x0c,0x10,0x0e,0x0c,
0x10,0x0e,0x10,0x0c,0x10,0x15,
0x13,0x10,0x13,0x15,0x15,0x13,
0x15,0x13,0x10,0x0e,0x0c,0x0e,
0x0e,0x10,0x0e,0x0c,0x0e,0x00};
uchar code jiedata[30]={ //音长代码0x04,0x04,0x08,0x06,0x02,0x08,
0x04,0x04,0x04,0x04,0x02,0x06,
0x08,0x02,0x02,0x04,0x04,0x04,
0x04,0x08,0x02,0x02,0x04,0x04,
0x02,0x02,0x04,0x04,0x0c,0x00};
void timer0() interrupt 1 //用于产生音符的T0中断服务程序{
TH0=th0_f;
TL0=tl0_f;
beep=~beep; //取反beep引脚,发声
}
void main(void)
{
uchar i,j,k=0;
uint n;
TMOD=0X01; //T0方式1
TR0=0; //关闭T0(不发声)
ET0=1; //允许T0中断
EA=1; //允许总中断
while(1)
{
TR0=1; //开T0
for(i=0;diaodata[i]!=0;i++)
{
th0_f=freq[diaodata[i]*2];
tl0_f=freq[diaodata[i]*2+1];
for(j=0;j<20000;n++); //(jiedata*20000) TR0=0;
for(n=0;n<256;n++); //音符之间的短暂延时
TR0=1;
}
TR0=0;
}
}。