数字式光伏电池阵列模拟器的研制
Kewell-GK-IVS系列太阳能 I-V模拟器产品介绍

太阳能电池I-V模拟器GK-IVS系列产品介绍合肥科威尔电源系统有限公司版权所有(C)2011 Copyright Kewell太阳能电池I-V模拟器产品介绍:合肥工业大学能源研究所(教育部光伏系统工程研究中心)于2000年即开始研究太阳能电池I-V模拟器,近年来多次在国际、国内核心期刊发表相关论文,是国内最早也是唯一一家从事太阳能电池I-V模拟器研究的国家级科研单位。
合肥科威尔电源系统有限公司依托合肥工业大学能源研究所在光伏行业多年的研究经验及成果,联合开发出Kewell太阳能电池I-V模拟器GK-IVS系列,产品分为120KW/630KW两种功率等级,120KW太阳能电池I-V模拟器可满功率测100KW或以下光伏逆变器,630KW太阳能电池I-V模拟器可满功率测500KW或以下光伏逆变器,可并且可多台并机使用。
GK-IVS系列太阳能电池I-V模拟器为太阳能电池阵列模拟电源,即太阳能电池I-V特性模拟器,产品主要部件均选用国际知名品牌,大屏幕LCD显示触摸式操作,采用IGBT式整流设计,转换效率高可达95%以上并且对电网的谐波污染小,主要应用于光伏逆变器研发及测试。
产品功能:一、程控直流电源:1)输出电压:电压可设定2)输出电流:限流点可设定二、太阳能电池I-V模拟器:1)电压输出范围:0~1000V2)输出电流:0~230A/0~1200A3)太阳电池阵列模拟I-V功能4)模拟不同温度及光照强度下的I-V曲线5)模拟光伏阵列局部阴影遮挡I-V曲线6)模拟缩放全天日照变化下I-V曲线7)测试静态和动态下MPPT效能8)具有资料存贮记录功能9)标准的输出接口USB / RS232 / RS485控制接口 GPIB(选配)10)即时的最大功率追踪显示11)LCD大屏幕显示,曲线、编程一目了然12)触摸式操作,简单便捷13)友好的人机操作界面,可本机操作也可通过上位机软件操作14)模拟全天累计电能计量(最新的附加功能)15)自动编程控制I-V曲线输出(可自动编程任意多条曲线,按时间运行)。
光伏阵列模拟器综述
( h n qn nv r i tt Ke a o a o y o o rT a s s o q i me t S s m C o g i g U i es y S a e y L b r tr f P we r n mi in E u p n & y t t s e
场合 。最 后 对 该 领 域 今 后 的研 究 方 向做 了展 望 。 关键 词 : 伏 发 电 ; 伏 阵列 ; 拟 式 模 拟 器 ; 字 式 模 拟 器 光 光 模 数
中 圈分 类号 ; M9 4 4 T 1 . 文献 标识 码 : A
S m m a y o o a r y Si u a o u r fS l r Ar a m l t r
E E T I R VE 2 1 V 14 N . 1 L C RCD I 01 o. 1 o 1
ቤተ መጻሕፍቲ ባይዱ
电 气传 动 2 1 0 1年 第 4 1卷 第 1 期 1
光伏 阵列模 拟 器 综 述
冯 玉 , 林 , 望 , 珂 , 强 周 傅 郭 刘
( 庆 大学 输 配 电装 备及 系统 安全 与新技 术 国家重点 实验 室 , 重 重庆 4 0 3 ) 0 0 0
摘 要 : 伏 阵 列 是 光 伏 发 电 系 统 中最 基 本 组 成 部 分 , 伏 阵 列 模 拟 器 能 够 代 替 实 际 光 伏 阵列 在 室 内进 行 光 光
各种光伏实验 , 目前 国 内外 专 家 学 者 已经 成 功 研 制 了一 些 不 同类 型 不 同 功 率 等 级 的 模 拟 器 , 些 模 拟 器 有 各 这
smu a o s c n r p a e t e a t a o a ra o d a it f p o o o t i e p r n s i d o . Ex e t n i lt r a e l c h c u ls l r a r y t o a v re y o h t v l c x e i a me t n o r p rsa d s h l r th me a d a r a a e s c e s u l e eo e u e fsmu a o s i i e e t p we e es a d c o a s a o n b o d h v u c s f l d v l p d a n mb ro i lt r n d f r n o r lv l n y f d fe e tt p s i r n y e ,wh c a e d fe e tc a a t rs isa d a p ia i n . Th r f r ,h u f ih h v ifr n h r c e it n p l t s c c o e e o e t e s mma y o h h t v l r ft e p o o o — t l r a i l t rwa n r d c d i c u i g t e a a o o a r a i lt rwh c p e r n t e e ry s a e ac a r y smu a o s i to u e ,n l d n h n l g s l ra r y smu a o ih a p a si h a l t g a d t e d g t l o a r a i lt rwh c sc r e ty s u id mo e n h i i lra r y Smu a o ih i u r n l t d e r .Fr m h y e a d p i cp e o h o a as o t e t p n rn i l ft e s l r a r y smu a o , u r a i l t r s mma ie h h r c e itc f v ro s smu a o s a d a p ia in . F n l , t ma e h rz s t e c a a t rs is o a iu i l t r n p l t s c o i al i y k st e p o p c n t e f t r e e r h i h s fed r s e to h u u er s a c n t i i l . Ke r s p o o o t i p we e e a i n; o a r a a ao i lt r d gt lsmu a o ywo d : h t v lac o rg n r to s l ra r y; n l g smu a o ; i i i l t r a
光伏模拟器光伏阵列模拟电源光伏曲线模拟器

光伏模拟器光伏阵列模拟电源光伏曲线模拟器光伏模拟电源光伏模拟器太阳能电池阵列模拟器光伏板模拟器
TPV1000太阳能电池阵列模拟器
深圳拓沃得⾃主研发⽣产光伏模拟器太阳能电池阵列模拟器光伏板模拟器欢迎考察⼯⼚
产品特点:
功率容量:600W--1500kW
可模拟太阳能电池板输出特性(国内⾸创)
可模拟不同光照和温度下I-V曲线
通过填充因⼦(Fill Factor)可模拟多种太阳能电池的输出特性
可模拟太阳能电池板被遮罩时的I-V曲线
可测试静态和动态下的MPPT情况
MPPT⼯作点实时显⽰于上位机软件上
具有恒功率模式
具有恒内阻模式,对内阻进⾏设定
具有强⼤的图形化上位机软件
稳压精度⾼、纹波电压低
采⽤16bit⾼速ADC,快速精确测量
采⽤ARM、DSP双CPU控制
应⽤全桥移相软开关技术
动态稳定性⽤Matlab仿真优化
采⽤⾼速DSP进⾏PID运算,直接输出PWM
变压器采⽤⾮晶铁芯,具有⾼饱和磁感应强度、⾼导磁率、⾼电感量、
低损耗、体积⼩、重量轻、抗电磁⼲扰能⼒强、频率特性优良、温度
稳定性⾼的特性
快速存储9组数据(电压,电流,功率)
具有过压、过流、过温、短路保护功能
电压、电流、时间设定,数字式按键输⼊,精确度⾼;
具有RS232C通讯接⼝(RS485,GPIB为可选)
产品通过CE认证
符合EN50530/Sandia/CGC-GF004标准
可以根据客户需求定制不同规格的光伏模拟器
原理图:。
直流微电网光伏模拟器
1
1.1 课题的背景及意义
绪论
在当今世界上,各个国家都将经济的发展作为主要任务,故而,对能源的需 求也是日益增大, 可以说经济增长离不开能源的开发利用。目前世界范围内的国 家都已煤、石油、天然气等化石能源为主。但这些化石能源都是不可再生且及其 有限的能源。 据联合国能源署的报告称,以目前地球上各国开采化石能源的速度 和地球化石能源的存储量来计算,煤炭资源可供开采 30 年,石油资源可供开采 30 年,天然气资源可供开采 50 年。可以说未来五十年,人类将把地球上几亿年 储存的化石能源消耗殆尽。 而且开采能源也会引发一系列的环境问题。可以说人 类面临的不仅仅是能源的匮乏,还有生存环境的挑战。 人类对化石能源的使用排放了大量的二氧化碳[1],这就造成全球气候变暖, 南北极冰川融化,陆地的干旱、沙漠化逐年加重。可以说未来如果人类还是如此 依赖化石能源必将造成十分严重的环境、气候问题。解决能源问题、保护生态环 境是人类急需解决的两件大事, 各国也在积极开发新能源。目前对一些可再生的 能源如水力、风能、潮汐、地热能等的开发利用受到了广泛的关注。但是这些能 源的利用很容易受到天气、 地域的影响, 严重时甚至对当地的生态环境造成影响。 而还有一种比较特别的能源核能也受到广泛的研究, 但是随着前苏联切尔诺贝利 核泄漏事件和 2011 年日本地震引起的核泄漏事情给社会造成了极大的危害,人 们对核能利用的副作用更加关注, 这就要求对核能的利用的技术必须更加成熟过 关。根据这些情况,为了解决能源和环境压力,人类必须开发出一种清洁可靠的 可再生能源[2],如此方能满足社会对能源的需求已经对生态环境的保护。 目前来说,最为清洁可靠的可再生能源当属太阳能。太阳能获取简单方便, 人类取之不尽。据相关计算,太阳每一秒钟发出的能量相当于地球上 1.3 亿亿吨 煤燃烧产生的热量,而其中照射到地球表面的约为全球发电力总和的 20 万倍。 更为关键的是太阳能发电没有废物排放,清洁绿色,利于人类生态环境的保护, 而其发电形式多种多样,不会受到空间地域的影响。从上个世纪开始,各国已经 开始了对太阳能的研究利用。 上世纪 90 年代许多国家开始实行光伏屋顶计划[3], 让光伏发电伴随建筑物。光伏屋顶是指将光伏电池阵列安装在屋顶或者墙壁, 就
交互式数字光伏阵列模拟器设计
作者 简介 : 刘璐( 1 9 9 0 一 ) , 女, 本科生 , 浙江大学 电子信息工程专业 , E —
ma i l : c a c t u s 0 9 @1 2 6 . e o m.
王正仕 , 男, 副教授 , 硕 士生导 师, E - ma i l : w z s @z j u . e d u . e n .
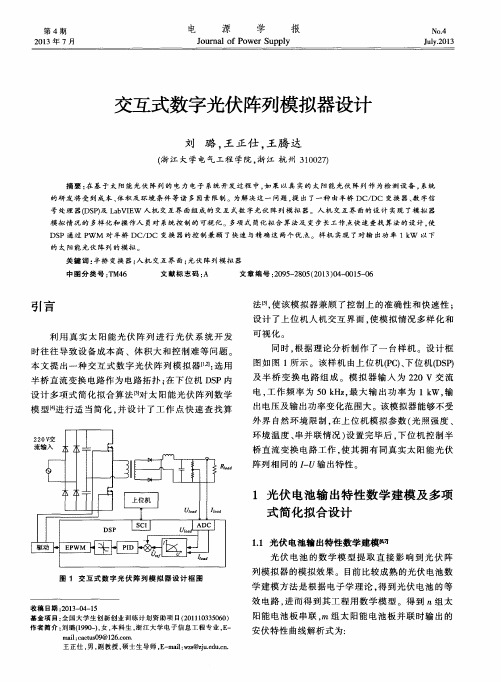
出 电压及 输 出功率 变化 范 围大 。该模 拟器 能够 不受 外 界 自然环 境 限制 , 在 上 位 机模 拟 参数 ( 光照 强 度 、
环境 温 度 、 串并联 情况 ) 设置 完 毕后 , 下位 机 控 制半 桥直 流 变换 电路 工作 , 使 其拥 有 同真 实太 阳能 光伏
阵列相 同的 , _ 输 出特 性 。
光伏 阵 列 的 , - 输 出 为对 数关 系 , D S P进 行 对
第 4期
2 0 1 3年 7月
电
源
学
报
No. 4
J o ur n a l of P owe r S up p l y
J u l y . 2 01 3
交互式数字光伏阵列模拟器设计
刘 璐, 王 正仕 , 王腾 达
( 浙 江大 学 电气工程 学 院 , 浙江 杭 州 3 1 0 0 2 7 )
本文 提 出一 种交 互 式 数 字光 伏 阵 列 模 拟器 ㈣ : 选 用 半桥 直 流变 换 电路 作为 电路 拓 扑 : 在 下位 机 D S P内 设 计 多 项式 简化 拟合 算 法[ 3 1 对 太 阳 能光 伏 阵列 数 学 模 型[ 4 1 进 行 适 当简 化 . 并 设 计 了 工作 点 快 速 查 找 算
同时 , 根 据理 论分 析 制作 了一 台 样机 。设 计 框
太阳能光伏阵列模拟器设计与实验研究

赵永强等 : 太阳能光伏阵列模拟器设计与实验研究
第1 期
阵列的输出特性 。对于光伏 发电模拟 系统的研究方案 , 图 1 压 电流分别为 = 7 V, 52A。B O T电路的发射极与 电源 如 爪 1 1 L= . 8 OS 如拍 O6284O64O % ∞ 所示 。其主要 由光 伏阵列模 拟器 以及 最大 功率点追 踪控制器 地相连 , 驱动电路 设计方便 , 其电压变 比恒大于 1易于满足光伏 , 构成 。 阵列输出电压较低情况下 , 电能送到直流母线 , 将 选用 B O T电 O S 路作为最大功率点追踪控制器主电路 。光伏发 电模拟系统 主电
出最 大功率 。
3 . 3各元器件参数选择
主电路的设计主要是功率开关器件的选取 , 以及输入 、 输出
L C参数 设 计 。
3 . 功 率开 关器件 选择 .1 3
选 取 型 号 为 1 H6D一 0 MB 0 10的 I B G T作 为 模 拟 器 主 电 路 的
功率开关器件 , 其额定参数 为 10 V6 A 续流二极管选用 I S 0 0 /0 。 XY
B C 5 0W, 5 可承受 的浪涌 电流高达 实现实质是光伏 系统 的一个 自寻优 过程 ,即通过控制阵列端 电 K P 3 1/ 可通过的平均电流为 3 A, 0A 2 0 ̄ 6 V, , 3 F 2 f。 压 ,使阵列能在各种不 同的 日照和温度环境下智能化地输 4 0 。滤波电容 c 采用 2 0 1 / 0 限流电阻 R= 0  ̄
模拟 器 输 出电 压 。
l; i i!
.
宝
√ 、 . J 墨 三
苫
堰
: 1
:
蓦
避
基于TMS320F2812的太阳能电池阵列模拟器设计

具库 中的元件模 型描述 主电路 ,另一方面则利用它提供 的强 大函数库进行 仿真 。
外环的快速性 , 电压调节器采用积分分离式 制 流 程 框 图
4 总结 与展 望
太 阳 能 电 池 阵 列模 拟 器 是 以 太 阳 能 电 池 的 数 学 模 型 为 基
+
一
② 开路电压 ( c u。)在给定温度照度下所 能输 出的最大 电
压:
③最大功率点电流( 在给定温度照度下最大功率点上 I m)
1 6
图 2 系统主电路设计 本系统的控制 电路 以 DS P芯片 T 3 0 2 1 MS 2 F 82为控制核
信 息通 信
心 , M S 2 F 82数 字信 号处 理 器 是 是 T 公 司推 出 的 3 T 30 2 1 I 2位
Ke r sT S 2 F 8 2 F l b i g o v re ; I e u ao y wo d : M 3 0 2 1 ; u l rd e c n e tr P g lt r - r
0 引言
虽然我国近十年经济发展迅猛 ,但随着 常规 能源 的曰益 减少 , 生态环境不断遭到破坏, 开发新能源 已成为我国的重要
3 太 阳能 电池 阵列模 拟器 的仿 真实现
为 了验 证 理 论 分 析 的 正 确 性 ,我 们 可 以 通 过 系 统 仿 真 的
光伏电池阵列模拟器的研究

0 引 言
目前 ,全球性 的 能源 危机迫使越 来越 多的 国家 开 始重 视 新 能源 的研 究 ,光 伏 发 电作 为 其 中很 重 要 的一 种 也得 到 了广 泛研 究 。但 由于 光 伏 电池 造 价高 ,导致研 究成本很 高 ,不利 于其初期 的研 究, 因此 ,很 有必要 设计一种 成本较低 ,能够代 替实 际 光伏 电池 阵列进行 各种光伏 实验 的太 阳 能电池 模拟
器。
l 光 伏 电 池 阵列 的 电气 特性
光伏 电池 阵列在 太 阳辐 射强度 为 1 0 / 0 m, 0 W
温度 为2 ℃条 件下 的 特 性 曲线如 图1 曲线 所 5 一 中
示 。从 图中可 以看 出光伏 电池 阵列是 一种非线 性
直流 电源 ,在 低压段 近似 为恒 流源 ,在 高压段特 性
AbtatBae ntep oo oti fV) r ys up t 。 hrc r,tassht orl e a eue t e ec aat ii src: sdo h tv l c P ar ’o tu Uc aat siri a fu n s nb sdt i a h ce s c h a a I e et i c o mit t h r rt
Re e r h o l rA r a i u a o s a c n So a r y S m l t r
T ANG . h n L1 i g y o。ZHANG e c e g。 N M n . a W i
, ,
( ol e f lcrncE gneigo o tes U iest N nig2 0 9 , hn ; 1C lg o Eet i n ier fS uha t nvri, ajn 10 6 C ia e o n y 2 C l g fEet nc n ier go N nogU ies Na tn 2 0 7 C ma ol eo l r iE gn ei f a tn nvr咖 e co n no g2 6 0, h )
光伏电池模型及其仿真实现

光伏电池模型及其仿真实现摘要:能源领域中的新能源产业一度崛起并得到了高速的发展,而光伏是清洁能源的重压组成部分之一。
本文从数学角度分析研究了光伏电池模型的机理,将其分成光电电流模块、饱和电流模块、反向饱和电流模块、分流电流模块、输出电流模块五大模块,在数学模型的基础上,基于matlab的simulink对光伏电池模型进行仿真实现,根据输出电压电流以及功率图像分析,该电池模型具有良好的拟合度,与工程实际的太阳能电池输出一致,模型为研究光伏发电功的相关仿真实验提供了平台支持。
关键字:光伏电池;模型;仿真;拟合度引言光伏系统在可再生能源发电系统中是最成熟的技术之一,具有电力可扩展,安装简单,维护量少和模块化等优点。
美洲、日本和德国较早的光伏产业发展一直走在世界前列,而中国的光伏产业近年来发展迅速,“十四五”发展计划以来,中国光伏产业得到了迅猛的发展[1-2],已占据了世界光伏电池产量的一半,太阳能资源由于其取之不尽,用之不竭的特点已经被世界各国所开发利用。
影响其发展的主要因素是国家的能源发展战略以及总体的发电系统运行投入成本。
从经济性的角度来看,太阳能资源获得容易,发电成本较低,在未来的很长时间里都可以作为新能源并网发电工程中的中坚力量[3]。
随着技术的进步,太阳能光伏未来很有可能成为人类的主流能源利用形式,因此光伏发电作为太阳能的利用方式成为人类必须要研究的课题[4]。
本文对光伏发电原理进行了探究分析,在matlab中搭建了光伏电池的仿真模型,得到了模型的输出曲线。
用matlab编程对光伏发电功率进行了预测,经探究,光伏发电功率与太阳辐射强度、大气温度、大气湿度有关,本文根据在西藏林芝地区采集的数据,设计了一个太阳能光伏发电功率的预测系统,在已知太阳辐射、大气温度、大气湿度的情况下,可以预测光伏系统的发电功率。
1.光伏电池模型光伏电池作为光伏阵列的最小组成单元,是一种利用半导体“光生伏打”效应将光能直接转化为电能的新型能量转换器[5]。
光伏电池工程用数学模型研究

光伏电池工程用数学模型研究随着可再生能源的日益重视和广泛应用,光伏电池作为一种重要的可再生能源转换设备,其研究和发展具有重要意义。
为了准确模拟光伏电池的性能和行为,需要建立有效的数学模型。
MATLAB是一种强大的数学计算和仿真软件,为光伏电池建模提供了便利。
光伏电池的通用数学模型可以根据物理原理和电路拓扑结构建立。
在物理原理方面,光伏电池利用半导体材料的光电效应将光能转化为电能。
这个过程可以表示为:$P_{in} = P_{out} + P_{loss}$,其中$P_{in}$为输入光功率,$P_{out}$为输出电功率,$P_{loss}$为损失功率。
在此基础上,根据能量守恒定律和半导体方程,可以建立光伏电池的数学模型。
在电路拓扑结构方面,光伏电池可以等效为电压源和电阻抗的组合。
其中,电压源表示光伏电池的开路电压$V_{OC}$,电阻抗表示光伏电池的内阻$R_{s}$。
根据电路原理,可以列出光伏电池的通用数学模型:$V_{OC} = V_{mp} + I_{mp}R_{s}$其中,$V_{mp}$为最大功率点电压,$I_{mp}$为最大功率点电流。
对于一个给定的光伏电池,其$V_{OC}$、$R_{s}$、$V_{mp}$和$I_{mp}$均为工作温度和光照强度等外部参数的函数。
利用MATLAB进行光伏电池建模时,可以根据上述数学模型编写程序代码。
根据物理原理和电路拓扑结构建立数学模型函数,然后使用MATLAB的仿真计算功能对函数进行求解和分析。
例如,可以使用MATLAB的优化工具箱对光伏电池的最大功率点进行寻址和控制,提高系统的效率和稳定性。
MATLAB还可以方便地绘制各种图表和图形来可视化结果,帮助人们更好地理解光伏电池的性能和行为。
基于MATLAB的光伏电池通用数学模型可以有效地模拟光伏电池的性能和行为,为光伏电池的研究和发展提供了有力支持。
光伏电池作为一种清洁、可再生的能源转换设备,已日益受到人们的。
光伏电池阵列模拟器研究

能较方便的模拟光伏电池在不同环境条件下 的特性 , 但数据 表 格会 占用 大 量 的存 储 空 间 ; 段 拟合 法 一 般 分 采用直线段对光伏特性曲线进 行拟合 , 对系统存储能 力要求不高, 以发挥数字控制器的实时运算能力, 可 但 拟合精 度 不高 。 本 文 提 出采 用 一次及 二 次 多项 式对光 伏 电池 特性 曲线进行分段拟合 , 同时结合电流反馈 P 控制提高系 1 统 的动 态性 能 以及稳 态 精 度 , 进行 了仿 真 和 实 验 验 并
tea t a v la ea d c re td t ,a d teo t u otg n u r n i lt n c a a trsi u v sgv n h cu l o tg n u rn a a n h u p tv la e a d c re tsmuai h rce it c r ei ie .Qu d ai o c a rt c
如图 所示。
』
始重 视新 能源 的研 究 , 伏 发 电作 为 其 中很 重要 的一 光 种也 得到 广泛研 究 。但 由于 光 伏 电池 造 价 高 , 导致 研 究成 本高 , 不利 于 初期 研 究 , 此 , 计 一 种 低成 本 能 因 设 模拟 光伏 电池 特性 的模 拟 器 来 代 替 实 际 的光 伏 电池 , 则能 大大 加快 光伏 发 电研 究 。实 现 对光 伏 电池 特性 的 模拟 主要 有 两 种 方 法 : 表 法 。 和 分 段 拟合 法[ 。 查 一 查表 法所 得到 的 电乐 ( 者 电流 ) 或 给定 量 较 精 确 , 同时
期 瓣
光 伏 电池 阵 列 模 拟 器 研 究
徐鹏威 , 杜 柯, 刘 飞 , 善旭 段 ( 华中科技大学 , 湖北 武 汉 4 0 7 ) 3 0 4 摘要 :文章 分析 了光伏电池阵列的输 出电压 电流特性 , 据光伏 阵 列实际 电压 电流参数进 行 了仿 真 , 出 了输 出电 根 给 压电流特性 的仿 真曲线 , 用 多项式对特性 曲线进行 了分段拟 合 , 刹 在此基础 上利 用 B K 电路设 计 了光伏 电池 阵 列模拟 UC
太阳能光伏电池模拟器的研究

1 太阳 能光伏 发 电简介
随着经济的增长 ,人们对能源的需求逐渐扩大 。目前 常规能源中的 石油 、天然气 、煤炭等已经不能满 足人们 日益增长 的能源需要 ,因此必 须利用和开发再生能源,太 阳能作 为一种不会枯竭 的清洁能源得到很多 国家 的重 视 。 对太 阳能的利用主要通过光 电转换 、光热转换和光化学转换三种途 径 ,其中光电转换是太阳能利用中最重要的方向。并且光电转换 中的光 伏发 电是太阳能发电的主流 ,光伏发 电就是将太阳能直接转变成 电能。 光伏 阵列作为光伏系统 的主要组成 部分 ,是将太 阳能转换 成电能的装 置 。目前光伏阵列 由于制造成本高 、 效率低 ,占地面积较大不适合科研 机构 购买开展光伏 系统的研究 ,因此 , 设计一个能够模拟光伏 阵列在各 种环境下工作的模拟器就非常必要 。 太阳能光伏阵列模拟器可以模 拟太 阳能电池在各种光照 、 温度下的 负载能力和系统性能 ,实现在线调试的完全逼真的模拟 。同时利用太阳 能电池阵列模拟器还可以检验 出系统的配置是否合理,通过改变太阳能 电磁 的连接方式 、连接数量从而实现最优 的配置方案。总之 ,太 阳能光 伏阵列模拟器可以缩短研究周期 ,降低研发成本 ,提高研究效率。
1 9 0
理 论研 究 苑
2宰6 科2 霸 L 0年 期 第 1
太阳能光伏 电池模拟器 的研究
张 广 宇
( 河南理1 大学 ,河南永城 4 6 0 7 6 0)
摘 要 太阳能作为一种不会 枯竭 的清 洁能源得到很多 闰家的重视 。光伏阵列作 为光伏 系统的 主要组 成部分 ,是将 太阳能转换成 电能的装
3 光 伏 阵列模拟 器 的硬件设 计及 控 制 电路 设计
光伏阵列模拟器在困内外都有研究 , 国的合肥工业大学 、西安交 我 通大学 、 浙江大学 、中科院电工所等单 位都开发 了基于不同工作原理的 模拟器 , 这些模拟器实现了对光伏阵列的很好模拟。通过研究发现,这 些模拟器有的制造成本较高,有的模拟效率较差 ,不能实现成本和效果 的完美结合。本文在数字式模拟器跟踪负载工作点的基础上 ,提出一种 使用模拟电路跟踪负载工作点的设计思路。
基于MATLAB软件的光伏阵列模拟器的研究

ap o o o ti ra i lt rb s d o h t v laca ry smu ao a e nDSP2 2c n r le, vn h e in o ad r nd s t r .Sm ua i e ut h w ha 81 o tolr giig t ed sg fh r wa ea ofwae i lt onr s lss o t t
此模 型可 以保证 与实 际情况 的误差 小于6 。 %
H
系 统 的数字 式光 伏 阵列模 拟器 , 实际上 就是 一种特
殊 的开 关 电源 ,数 字 信 号 处理 器D P 出 的开 关信 S输 号通过 驱动 电路 来控  ̄ B c 电路开关 管 的导通 和关 Ou k 断 ,从 而使B c 电路 输 出的 电压 和 电流根 据光伏 模 uk 块 的输 出特 性变化 。对软件 算法 以及硬 件 电路进 行 了研 究 ,设计 了… 个 输 出功 率 为5 0W 0 的光 伏 模 拟 器 ,通过 仿真 验证 ,模 拟器 的输 出特性 非 常接近 光
中图分类号 :T 6 5 M 1
文献标识码 :A
文 章编号 :10 — 15 2 1) 5 0 1— 3 0 7 3 7 (0 2 0 — 0 3 0
St y 0 ud fPho o o t i r y Si u a o s d 0 ATLAB t v la cAr a m l t rBa e n M
列模拟 器 ,并给 出了软硬 件设计 ,仿真 结果证 明基 于逐点 差值 比较 法 的双 闭环分段 跟踪 策略 可以使 模 拟器 的输 出特性 非常接近 光伏 阵列 的工程 用数学模 型 ,并具有 良好 的动态 响应 。
关键词: 光伏模拟器;D P 8 2 S 2 1 控制器 ;逐点差值 比较法;B c u k电路
一种数字式光伏阵列模拟系统的研究

和环 境温度 等 自然 条件 强烈约 束 ,得 到 的数据往 往 也存在 很大 的随机性 ,不 适合科 学研 究 。此 外 ,如
果实 验 中需要 不 同容量 、 电压 等级 的光伏 阵列 ,还
性 以及 温 度 特 性 。 日照 强 度 会 影 响 光伏 电池 的输 出特性 ,在 其他条件 ( 光伏 电池 的数量 及联结 方式 、
Ab tat T v  ̄o edsd atg s fh n lg u h tv l i P arys l o, ii l V r ys ltr d po src: oo e met iav nae teaao o s oo ot c(V) r i a radgt ar i a eu f h o p a a mu t aP a mu o ma a
试验 ,不仅成 本 高、耗 时长 ,而且 由于受 日照强 度
不 同室外 条件 下的性 能和动态 稳态行 为 ,实现对 系 统在 线工作 与在线 调试 的完全逼 真 的模 拟和仿 真 。
1 光伏 阵 列 模拟 器
1用 来模拟 任何 日照 及温 度 下 ,任意 组合 的太 阳能 电池 阵列 的特 性 。光 伏 阵 列 的特 性 u 是指输 出伏 安特性 ( 一 特性 ) 』V 、照度特
Ke r s p o o o t i r a ; i lt r DC h p e y wo d : h t v l c ar y s mu a o ; a co pr
0 引 言
太 阳能作为 一种新 型 的可 再生 资源 受到越来 越 广泛 的重视 ,光 伏发 电则是太 阳 能利用 中技术含 量 最 高、最有 发展前 途 的技术 。现在 ,光伏 发 电系统 已在 世界 范围 内得到越 来越广 泛 的应 用 。但在光 伏 发 电系统研 究过程 中,若采用 真实 的光伏 阵列进 行
基于Matlab的一种光伏阵列模拟器的研究

列模 拟 器 Malb仿真模型 , t a 可以模 拟任 意太 阳辐射强度 、 环境温度 、 光伏模 块参数 下的光 伏阵 列 I —u特性 , 真结果证 仿
明 了原 理 的 可 行 性 。
关 键 词 :光 伏 阵 列 特 性 ; 拟 器 ; t b仿 真 模 Mal a 中 图 分 类 号 :T 1 N7 1 文献标识码 : A
Re e c n t ePh t v lacAra i u a o s d O3M a lb s r h o h o o o ti r y Sm lt rBa e 1 _ t a
DU 。 Ke DUAN h n x 。 U e S a - u LI F i
( Hu z o g Un v r iy o c e c n c n l g , u a 3 0 4, ia a h n i e st fS in e a d Te h oo y W h n 4 0 7 Ch n ) Ab ta t s r c :Th s p p r p e e t h rn i l fa p o o o t i( i a e r s n s t e p i cp e o h t v lac PV)smu a o ih e lt s t e o t u h r ce it s i lt rwh c mu a e h u p t a a t rs i c c o f PV r a s A i lt n mo e o h t v lac a r y smu a o n e a l b e v r n n a e n t e ma h ma ia a r y . smu a i d lf r p o o o t i r a i lt r u d r M ta n io me tb s d o h t e tc l o mo u e fPV r a s a d p we lc r n c t c n l g u l u .I h d l t eIV h r c e it so h t v l i a r y d ls o a r y n o ree t o i e h o o y i b i p n t emo e , h - c a a t rs i fp o o o t c r a s t c a c n b i lt d a n o r s o d n n o a i n lv l mb e ttm p r t r n a a t r ft e p o o o t i d l . e a e smu a e ta y c r e p n i g i s l t e ,a in e e a u ea d p r me e s o h h t v lacmo u e Th o e f a i i t ft e t e r s p o e y t e r s l f a lb smu a i n . e sb l y o h h o y i r v d b h e u t o t i lto s i s M a Ke r s h r c e itco h t v l i a r y smu a o ;M a l b smu a in y wo d :c a a t rs i f p o o o t c r a ; i lt r a t i lto a
基于可编程电源的光伏电池阵列模拟系统设计

. . . . . . . . . . . . .
-
4 56 9
. . . . . . . . . . . . . . — —
实
验
技
术
与
管
理
.................. .
.
.
.
.
.
第2 8卷
第1 1期
21 年 1 01 1月
C 1 2 3/ N1 ~ 0 4 T
摘
要 : 了提 高 高 校 实 验设 备 的综 合 利 用 率 , 出 了 一 种基 于 可 编程 电源 的光 伏 电池 阵 列 模 拟 系 统 实 现 方 为 给
法 。采 用 上 位 P C机 计算 太 阳 能 电池 阵列 的伏 安 特 性 曲 线 , 通 过 串 行 通 信 控 制 可 编 程 电 源 , 其 输 出 电压 并 使 和 电 流跟 踪 该 伏 安 特 性 曲线 , 而用 可 编 程 电 源 实 现 了 光 伏 电 池 阵 列 模 拟 器 的 功 能 。根 据 光 伏 电 池 等 效 电 从 路 模 型 , 出 了 基 于 光 伏 电 池 阵列 开 路 电 压 、 路 电 流 、 大 功 率 点 对 应 电压 和 电 流 等 参 数 的 光 伏 电 池 伏 安 导 短 最
D s no oa ra i lt n s s m a e n po rmma l p w rs p l ei ห้องสมุดไป่ตู้f l arys g s r muai y t b sdo rg a o e be o e u py
W a g M ig a u i n n d ,S nJe
( c o l fM e h nc l S h o c a ia ,Elcrcl& I fr t n En ie r g h n o g Unv r i tW eh i o e tia n o ma i gn ei ,S a d n ie st a ia ,W eh i2 4 0 ,Chn ) o n y ia 6 2 9 ia
KDCIV系列光伏阵列IV模拟器
KDC/IV系列光伏阵列IV模拟器产品简介合肥科威尔电源系统有限公司最新推出KDC/IV系列光伏阵列IV模拟器最大输出电压达1500V,单机最大输出功率为15kW,采用移相全桥软开关技术,效率在93%以上。
可以精确的仿真太阳能光伏阵列,确保了I-V模拟器实际输出的精度和动态特性。
KDC/IV系列光伏阵列IV模拟器是测试逆变器MPPT效率的重要工具,产品性价比高,解决了光伏逆变器MPPT跟踪及其效能满载测试的难题。
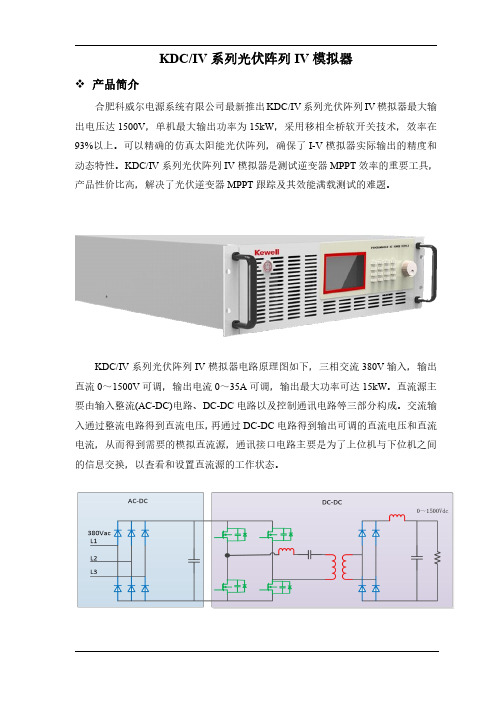
KDC/IV系列光伏阵列IV模拟器电路原理图如下,三相交流380V输入,输出直流0~1500V可调,输出电流0~35A可调,输出最大功率可达15kW。
直流源主要由输入整流(AC-DC)电路、DC-DC电路以及控制通讯电路等三部分构成。
交流输入通过整流电路得到直流电压,再通过DC-DC电路得到输出可调的直流电压和直流电流,从而得到需要的模拟直流源,通讯接口电路主要是为了上位机与下位机之间的信息交换,以查看和设置直流源的工作状态。
KDC系列高频直流源电路原理图产品功能特点●自动宽范围输出电流可达35A电压达到1500V(可以多机并联使用);●自动编程控制I-V曲线输出(可自动编程任意多条曲线,按时间运行);●模拟不同类型太阳电池阵列I-V曲线(单晶,多晶,薄膜);●模拟不同温度及光照强度下的I-V曲线;●模拟光伏阵列局部阴影遮挡I-V曲线;●模拟缩放全天日照变化下I-V曲线;●静态和动态下MPPT效能测试;●内置EN50530及CGC/GF004关于动态MPPT测试要求,一键式调取测试;●模拟全天累计电能计量;●输出电流、电压精度高;●多种标准的输出接口CAN/USB/RS485/ETHERNET;●转换效率最高可达93%以上;●LCD大屏幕显示,曲线、编程一目了然,触摸式操作,简单便捷;●具有资料存贮记录功能;●友好的人机操作界面,可本机操作也可通过上位机软件操作●标准3U机箱,方便安装。
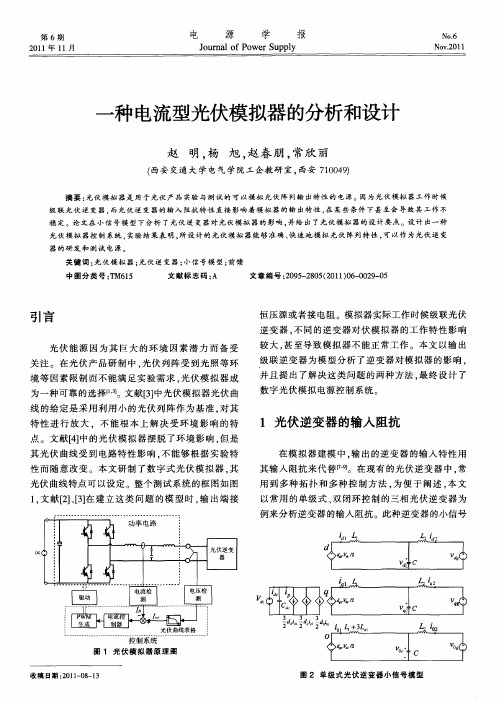
一种电流型光伏模拟器的分析和设计
会 导 致 整 个 控 制 系 统 的低 频 增 益 降低 ,抗 扰 动性
差 。因此 , 在设计 调 节器 的 时候 , 必须 将低 频增 益设
计 的尽 可 能 的 高 . 且 保 证 系统 的稳定 性 以增 强抗 并 扰性 能 。通 常情 况 下 , 考虑 输 出阻抗 特 性 , 节 器 不 调 设 计 成 式 ( ) 示 , 种 情 况 下 系 统 的 相 角裕 度 较 7所 这 大, 但是 低 频 增 益不 是 很 高 。按 照 本文 的分 析 的结 论 , 节 器 需 要 设 置 成 式 ( ) 其 相 角 裕 度 相 对 较 调 6, 小 , 是低 频 增益很 高 , 但 以满足 跟踪 效果 。加人 调 节
引言
光 伏 能 源 因为 其 巨 大 的环 境 因 素 潜 力 而 备 受
关 注 。在 光伏 产 品 研制 中 , 伏 列 阵受 到 光 照等 环 光 境等 因素 限制 而 不 能满 足 实 验需 求 , 伏 模 拟器 成 光 为一 种 可靠 的选 择【] l 。文献 『1 1 3 3中光伏 模拟 器光 伏 曲 线 的给 定 是采 用 利 用小 的光伏 列 阵作 为基 准 , 其 对
足原 因 . 真 M 仿
电压 变 化 设 置 为 1 时 间 步 OV,
长设 置为 01s 以加快仿 真 速度 。 . , 实验 方 面 ,本 文在 模 拟器 接 逆 变器 的情 况 下 . 采用 G 调 节 器 , 进行 了 MP T实验 , 验结 果 如 图 P 实
Frqu n y c s c e e c  ̄aV e
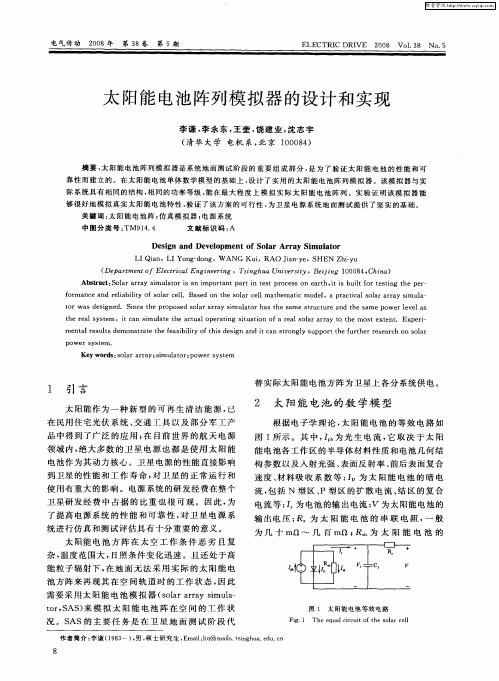
太阳能电池阵列模拟器的设计和实现
( p rme t f Elcrc lEn i ern De a t n etia g n e ig,Tsn h a Un v ri o ig u ie st y,Bej n 0 0 4 Ch n ) iig 1 0 8 , ia
Absr t S ara r y sm ul t ri n i po t ntp ti e tpr e s o a t i s bu l ort s i g t r tac : ol r a i a o s a m r a ar n t s oc s n e rh,ti itf e tn he pe —
际 系 统 具 有 相 同的 结 构 , 同 的功 率 等 级 , 在 最 大 程 度 上 模 拟 实 际 太 阳 能 电池 阵 列 。实 验 证 明 该 模 拟 器 能 相 能 够 很 好 地 模 拟 真 实 太 阳 能 电 池 特 性 , 证 了该 方 案 的可 行 性 , 卫 星 电源 系 统 地 面测 试 提 供 了坚 实 的基 础 。 验 为 关 键 词 : 阳能 电池 阵 ; 真 模 拟 器 ; 源 系 统 太 仿 电
摘 要 : 阳 能 电 池 阵 列模 拟 器 是 系 统地 面测 试 阶 段 的 重 要 组 成 部 分 , 为 了 验 证 太 阳 能 电 池 的性 能 和 可 太 是
靠 性 而 建 立 的 。在 太 阳 能 电 池 单 体 数 学 模 型 的 基 础 上 , 计 了 实 用 的 太 阳 能 电 池 阵 列 模 拟 器 。该 模 拟 器 与 实 设
2 太 阳 能 电 池 的 数 学模 型
根据 电子 学理 论 , 阳能 电池 的 等效 电路 如 太
图 1所示 。其 中 , 光 生 电流 , 取 决 于 太 阳 。为 它 能 电池各工 作 区 的半 导体 材料 性质 和 电池几何 结 构 参 数 以及 入射 光强 、 面反射 率 、 表 前后 表面 复合 速度 、 材料 吸 收 系 数 等 ;。为 太 阳能 电池 的暗 电 I 流 , 括 N型区、 包 P型 区的 扩散 电流 、 区 的复 合 结 电流 等 ; 电池 的输 出电流 ; 为太 阳能 电池 的 I为 V
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
数字式光伏电池阵列模拟器的研制
2011-03-17 16:30:18 来源:OFweek太阳能光伏网
介绍太阳能电池的工作原理及其数学模型的基础上,选择半桥变换器作为主电路拓扑,研制了一台光伏电池阵列模拟器。
控制部分采用TMS320F2812 DSP作为模拟器控制电路的主控制器,将数字PI控制算法应用在数字式光伏电池阵列模拟器中。
在闭环实验下,模拟器的静态工作点与所模拟的太阳能电池的输出特性相吻合,并能够动态模拟负载变化的工作情况。
证明了所设计的模拟器能够用于光伏发电系统实验。
1 引言
太阳能作为一种新型的可再生资源受到越来越广泛的重视,但在光伏系统的研发过程中,太阳能电池阵列由于实验受到日照强度、环境温度的影响,导致实验成本过高,研发周期变长。
光伏电池阵列模拟器可以大大缩短光伏系统的研究周期,提高研究效率及研究结果的可信性。
本文设计的光伏电池阵列模拟器以半桥电路为基础,基于DSP控制,并加入了PI控制改善系统动态性能和稳态精度。
2 太阳能电池的工作特性
太阳能电池在有光照条件下,光生电流会流过负载,从而产生负载电压。
这时太阳能电池的等效电路如图1所示。
其中,RS为串联电阻,Rsh为旁漏电阻,也称跨接电阻,它是由体内的缺陷或硅片边缘不清洁引起的。
显然,旁路电流Ish 和二极管的正向电流ID (通过PN结总扩散电流)都要靠IL提供,剩余的led光电流经过RS,流出太阳能电池而进入负载。
根据文献资料[1],利用厂家提供的短路电流Isc,开路电压VOC,最大功率点处的电流Im和最大功率点处的电压Vm这四个参数可以得到太阳能电池板便于工程计算的模型:
这样,就把太阳能电池板的I-V特性曲线转换为简单的、便于工程计算的形式。
3 光伏电池阵列模拟器设计
模拟器的目的是要能模拟一定光照下,随负载变化的太阳能电池板的电特性,包括最大输出功率,输出I-V特性,以及不同日照下的变化。
其应该完成以下三个方面的要求:
(1) 系统能够按照光伏阵列的输出特性完成输出,当外电路负载一定时,系统能够在工作点上保持稳定的输出;
(2) 当外接负载发生变化时,模拟器能够以合乎要求的速度变化到新工作点并能稳定在该点;
(3) 能够输出要求的功率;
本文设计的光伏阵列模拟器的系统结构框图如图2所示,整个系统主要由功率电路和采集控制电路两部分构成。
功率电路采用半桥拓扑,用以完成直流变换,经整流滤波后,产生合适的输出电压。
检测电路实时采集输出电压、电流,并送给DSP控制电路。
DSP依据采集到的值,产生合适的占空比信号控制半桥两个IGBT开关。
隔离驱动电路用于驱动IGBT开关,并实现与控制电路的隔离。
如果想要模拟一条新的太阳能电池板I-V曲线,只需在软件中重新设定该曲线的和,这四个参数就可以了。
由于半桥母线电压为100V,单个管子承受耐压应该在100V以上,系统最大输出电流为3.5A。
综合以上因素后,我们选择Infinion公司生产的IGBT单管IKW40N120T2,其耐压1200V,可通过的均值电流40A,且该单管价格便宜,开通、关断时间极短,开通压降只有1.7V,因此,开关损耗较小,是较理想的选择。
在本系统中,一共需要四路采集,分别是半桥高低端电压采集,输出电压电流采集。
这四路信号都要设定过压或过流保护。
采集电流信号使用电流传感器,采集电压信号使用电阻分压的形式。
本设计的采集电路使用差分信号传输,并基于三级采集电路设计:首先使用全差分放大器LTC1992进行单端到差分信号的转换;然后使用模拟线性光耦HCPL7840进行信号隔离;最后使用仪用运放INA121将信号进行适当放大。
4 控制算法实现
4.1 寻找负载工作点的算法设计
光伏模拟器主要是跟踪负载的工作点,使得模拟器在不同负载情况下的输出能满足光伏阵列的输出特性。
静态工作点的确定是模拟器的关键,如何在一特定负载下快速寻找到期望工作点,并使电源工作在这个点上。
当负载变化,或是环境条件变化时,又如何找到新的工作点,并快速且精确的控制电源运行在这个工作点上,是模拟器控制算法所要解决的核心问题。
当负载电阻确定后,想要确定工作点处的电压电流,需要代入式(1)进行计算,但公式复杂,且涉及指数运算,在程序实现上十分麻烦,而且也会影响系统响应的速度。
从我们研究太阳能电池的输出I-V特性曲线可以看到,在短路电流点附近,电池板接近恒流,输出I-V曲线在这一段接近一条直线;在开路电压点附近,电池板接近恒压,输出I-V曲线在这一段也接近一条直线。
所以我们用四条直线来对电池板输出I-V曲线进行拟合,如图3所示。
只要我们采集输出电压电流,得到负载电阻,其伏安特性曲线是一条通过原点的直线,这一直线与上面某一条直线必然交于一点,这一点就是我们系统的理想工作点。
然后再根据这一点的电压和半桥公式就能得到系统需要发出的占空比。
4.2 PI控制算法在模拟器中的应用
为了提高系统速度和减少静态误差,在控制系统中应用了PI控制算法,本设计的控制结构见图4。
根据上文的控制策略,从测得的输出电压电流,可以得到输出负载RL,进而得到参考电压Vref,它与实际输出电压相减送入PI控制器中,PI输出控制调节占空比,进而使实际输出电压与Vref一致。
依据振荡法,对PI参数进行了整定。
先让积分常数为零,比例系数KP 由小增加到0.03时,示波器观察输出压开始出现等幅振荡,振荡周期为0.014s,则,Kr《0.03,Pr《0.014。
进而得到:
表1 变负载时的输出电压
将上述得到的理论、代入程序中,运行测得输出几乎与理论值一致,偏差基本都在0.3V以内,证明了我们整定的参数是成功的。
4.3 软件主程序流程图
系统的控制工作是由软件部分完成的。
软件系统的工作主要有两点:一是采集数据;二是完成占空比的计算。
主程序模块中主要是进行系统初始化工作及等待处理中断,其中系统初始化主要包括ADC模块的初始化和事件管理器EVB 模块的初始化。
主程序流程图见图5。
5 实验结果
基于前面各章对硬件设计、算法、软件编程等方面的研究,设计了一台光伏电池阵列模拟器,其技术参数为:
5.1 模拟器系统的静态效果
为了验证系统输出是否能模拟出一条理想的太阳能电池的输出I-V特性曲线,需要测试RL取不同值时,输出的工作点情况。
依据四折线法,RL确定后,就能确定理论的输出电压。
依照以上方法进行了一组不同负载实验,测试的数据如表1所示。
由表1可以看到,系统输出电压在69.4V以上时,系统工作在最大功率点附近和开路电压附近,这时系统输出精度基本都在1%以下。
说明我们设计的光伏电池阵列模拟器能够在变负载时,比较精确的模拟出太阳能电池阵列的输出
I-V特性曲线
5.2 模拟器系统的动态效果
设计光伏电池阵列模拟器的最终目的是要用于光伏逆变系统实验,因此,只在静态情况下描出太阳能电池板输出I-V特性曲线是不够的,还需要用实验检测系统的响应速度,即动态特性。
影响本系统动态响应时间的因素主要有两个:一是输出电容的电压惯性;二是系统软件算法的执行时间。
我们做了两个实验,一是负载突变时,看输出电压的变化;二是直接接光伏逆变系统,让逆变器按照最大功率点跟踪算法(MPPT)去测试模拟器的性能。
如果逆变器能跟踪到最大的功率,则说明我们的模拟器达到了设计指标。
我们将负载电阻进行突变,输出电压也会变化。
图6是在模拟开路电压为40V时,负载电阻由21.6 Ω突变到49.5 Ω时,输出电压由31.6V跳变到36.1V 时的动态响应波形。
由图6可以看到,输出电压可以在约8ms的时间里完成变化响应,但是,这个速度到底够不够,还要看接上实际逆变器后的效果。
在逆变器前端是BOOST电路,用以实现MPPT算法。
BOOST电路输入端与我们设计的模拟器相连后,输出端接一电阻。
首先让模拟器工作,测量此时输出为开路电压。
然后,BOOST电路开始工作,执行MPPT算法。
实验测量,BOOST输入电压由开路电压90V逐渐减小,最终在最大功率点电压80V处基本稳定,证明找到了模拟电池的最大功率点。
6 结论
本文在研究了太阳能电池的数学模型的基础上,结合电力电子技术和控制技术,给出了一个基于微控制器和DC/DC环节的光伏阵列模拟器的设计。
实验证明,模拟器样机可以有效的模拟光伏阵列的输出,输出特性可以比较准确的模拟光伏阵列,输出电压、电流较稳定。