一种新型智能清洁机器人测控系统的设计与实现_百度文库
《清扫机器人控制系统的实现与改进》范文

《清扫机器人控制系统的实现与改进》篇一一、引言随着科技的发展和人们对生活品质要求的提高,清扫机器人已经成为现代家庭不可或缺的家电之一。
其高效的清洁能力和便捷的操作方式,大大提升了人们的居住体验。
而清扫机器人的核心部分——控制系统,其实现与改进,对于机器人的性能和使用体验至关重要。
本文将详细探讨清扫机器人控制系统的实现及改进措施。
二、清扫机器人控制系统的实现1. 硬件设计清扫机器人的硬件系统主要包括主板、电机驱动、传感器、电池等部分。
其中,主板是整个系统的核心,负责控制电机的运动和传感器的数据采集。
电机驱动则负责将主板的指令转化为电机的运动,传感器则负责获取环境信息,如障碍物、地面材质等。
电池则为机器人提供动力。
2. 软件设计软件系统是清扫机器人的“大脑”,负责处理传感器数据,控制电机的运动,以及与用户的交互。
软件系统通常包括操作系统、控制算法、路径规划等部分。
(1)操作系统:通常采用嵌入式系统,具有实时性、低功耗等特点。
(2)控制算法:控制算法是清扫机器人的核心,包括电机控制、传感器数据处理等部分。
通过算法,机器人能够根据环境信息,自主决定运动路径和清洁策略。
(3)路径规划:路径规划是清扫机器人实现自动清洁的关键技术。
通过地图构建、路径规划算法等,机器人能够在室内环境中自主导航,完成清洁任务。
三、清扫机器人控制系统的改进1. 优化硬件设计(1)采用更高效的电机和电池,提高机器人的运行效率和续航能力。
(2)增加更多类型的传感器,如红外传感器、激光雷达等,提高机器人对环境的感知能力。
(3)优化主板设计,提高处理速度和稳定性,降低功耗。
2. 优化软件系统(1)改进控制算法:通过优化电机控制和传感器数据处理算法,提高机器人的清洁效率和适应性。
(2)地图构建与路径规划优化:通过改进地图构建算法和路径规划算法,使机器人能够更准确地识别和记忆室内环境,实现更高效的清洁路径规划。
(3)增加人机交互功能:通过引入语音识别、虚拟助手等交互方式,提高用户体验。
智能清洁装置控制系统设计毕业设计论文

毕业设计论文智能清洁装置控制系统设计(系统软件)摘要随着信息技术的不断发展,各种产品的技术含量及复杂程度也越来越高,智能化的概念开始逐渐渗透到各行各业以及我们生活中的方方面面。
本文以智能计算机控制技术为理论基础,设计了一种以MSP430F149单片机为主控制器的智能清洁装置。
该装置能按照一定的行走模式对复杂的空间环境进行清扫,当遇到障碍物时它能启动避障程序绕开障碍物再按照原来的模式进行清扫工作。
如果地面上有台阶,它还能自动启动防摔落程序防止清洁装置被摔坏。
文章主要围绕它的这些功能进行系统设计以及相关功能软件的分析与设计。
在IAR EW430编译环境下编写系统程序,编译成功并下载到硬件系统中。
最终,本设计完成了智能清洁装置预期的功能,达到设计要求。
关键字:智能控制系统;扫地机器人;MSP430;路径规划Intelligent control system designof cleaning device(System software)AbstractWith the development of the information technology, the technological content and complexity of products are becoming better than before. The concept of intelligent gradually began to infiltrate into all walks of life and we all aspects of the life.The paper based on the intelligent control technology, designing a intelligent cleaning device by MSP430F149 MCU which was the master controller of the system. The device can clean complicated space according to establish walking pattern. When faced with obstacles it can start the obstacle avoidance procedures around obstacles. Then according to the original mode of cleaning work.If the ground with a step, it can also automatically start a program to prevent the cleaning device being broken. The paper mainly around which these functions of the system design and function of software analysis and design. The next task is writing system programs in the compiler environment, After successfully compiled and downloaded to the hardware system. Eventually, the design completed intended function of the intelligent cleaning device and reached the design requirement.Key Word:Intelligent control system; Cleaning robot; MSP430; Path planning目录摘要 (II)Abstract (III)1 绪论 (1)1.1 序言 (1)1.2 选题的背景和意义 (1)1.3 智能清洁装置的研究现状 (2)1.4 智能清洁装置研究的关键技术 (3)1.5 本课题研究的主要内容 (4)1.6 本章小结 (4)2 智能清洁装置控制系统结构与总体方案设计 (5)2.1 智能清洁装置结构 (5)2.2 智能清洁装置控制系统总体方案设计 (6)2.2.1 控制器模块 (6)2.2.2 信息采集模块 (7)2.2.3 电机驱动模块 (8)2.2.4 电源模块 (10)2.3 本章小结 (10)3 智能清洁装置控制系统软件设计 (11)3.1系统软件总体设计思路 (11)3.1.1 软件结构 (11)3.1.2 软件实现的总体思想 (12)3.2 各模块程序设计 (14)3.2.1 单片机系统时钟初始化 (14)3.2.2 电机驱动模块程序设计 (15)3.2.3 避障模块程序设计 (16)3.2.4 防摔模块程序设计 (18)3.2.5 主程序模块设计 (19)3.3 中断程序与中断嵌套问题 (20)3.4 本章小结 (21)4 系统调试 (22)4.1 软件调试 (22)4.2 系统软硬件联调 (23)5 结论 (24)致谢 (25)参考文献 (26)附录1 (27)附录2 (37)1绪论1.1 序言顾名思义,智能清洁装置控制系统也被叫做智能清洁机器人。
基于机器人技术的智能家居保洁系统设计
基于机器人技术的智能家居保洁系统设计智能家居保洁系统设计:在现代社会,智能家居技术越来越受到人们的关注和追捧。
随着科技的不断发展和进步,机器人技术在智能家居中的应用变得越来越广泛。
基于机器人技术的智能家居保洁系统设计旨在提供一种方便、高效且智能的家居清洁解决方案。
一、智能家居保洁系统的设计思路(1)智能家居保洁系统的核心利用机器人技术,实现自动化清洁任务。
首先,智能家居保洁系统需要一个可靠、稳定且智能化的机器人平台。
该平台应具备自主移动、环境感知、路径规划、智能清洁等功能。
通过使用先进的感知技术如机器视觉、激光雷达等,机器人能够自主感知和识别需要清洁的区域。
路径规划算法可以帮助机器人规划最佳的清洁路线,从而提高清洁任务的效率。
(2)智能家居保洁系统需要集成智能家居控制中心。
为了实现集成化管理,智能家居保洁系统需要与智能家居控制中心进行连接和集成。
通过与智能家居控制中心的互动,用户可以通过手机、平板电脑等终端设备远程监控和操作智能家居保洁系统。
这样,用户可以随时随地掌握家居清洁的情况,并进行相应的调整和控制。
(3)智能家居保洁系统需要多种清洁模式和功能的支持。
为了满足不同用户的需求,智能家居保洁系统应支持多种清洁模式和功能。
例如,可以提供全自动清洁模式、定点清洁模式、定时清洁模式等,以适应不同家居环境和用户需求。
此外,系统还应支持多种功能,如地板清洁、窗户清洁、家具清洁等,以提供全面的家居保洁服务。
二、智能家居保洁系统的关键技术(1)机器人导航与路径规划技术机器人导航与路径规划技术是智能家居保洁系统的关键技术之一。
通过使用激光雷达等传感器,机器人能够感知周围环境并构建地图。
路径规划算法可以根据地图信息和清洁任务需求,制定最佳的清洁路线,从而提高清洁任务的效率。
(2)机器视觉和物体识别技术机器视觉和物体识别技术可以帮助机器人感知和识别需要清洁的区域和物体。
通过使用摄像头和图像处理算法,机器人可以自主辨别出墙角、家具和地板等需要清洁的位置,从而实现智能化的清洁任务。
《清扫机器人控制系统的实现与改进》范文

《清扫机器人控制系统的实现与改进》篇一一、引言随着科技的飞速发展,智能家居逐渐成为人们生活的必需品。
其中,清扫机器人作为智能家居的重要组成部分,其控制系统的实现与改进对于提升用户体验和产品性能至关重要。
本文将详细介绍清扫机器人控制系统的实现过程及后续的改进措施。
二、清扫机器人控制系统实现1. 硬件设计清扫机器人硬件主要包括主控芯片、电机驱动模块、传感器模块(如红外传感器、超声波传感器等)、电池及充电模块等。
主控芯片负责控制机器人的整体运行,电机驱动模块驱动机器人移动,传感器模块用于感知环境信息,电池及充电模块为机器人提供动力。
2. 软件设计软件设计主要包括操作系统、算法及控制策略。
操作系统负责管理机器人硬件资源,算法包括路径规划、避障、电量管理等,控制策略则是将算法与硬件结合起来,实现对机器人的有效控制。
3. 系统集成系统集成是将硬件和软件进行整合的过程,确保各个模块之间的协调工作。
在集成过程中,需要进行多次调试和优化,以保证机器人的稳定性和性能。
三、清扫机器人控制系统改进措施1. 优化路径规划算法路径规划是清扫机器人的核心算法之一。
通过优化路径规划算法,可以提高机器人的清扫效率,减少重复和遗漏。
例如,可以采用改进的遗传算法或蚁群算法等智能算法,实现更高效的路径规划。
2. 增强传感器性能传感器是机器人感知环境的重要工具。
通过增强传感器性能,可以提高机器人的环境感知能力,从而更好地适应各种复杂环境。
例如,可以引入更高精度的激光雷达或红外传感器等。
3. 引入人工智能技术引入人工智能技术,如深度学习和机器学习等,可以使机器人具备更强的自主学习和决策能力。
例如,通过训练神经网络模型,使机器人能够识别和区分不同类型的垃圾,并自动调整清扫策略。
4. 优化用户体验界面用户体验界面是用户与机器人进行交互的窗口。
通过优化用户体验界面,可以提高用户的使用体验和满意度。
例如,可以增加语音交互功能、实时显示清扫进度和电量等信息。
智能清洁机器人设计
智能清洁机器人设计第一篇:智能清洁机器人设计传感器应用——智能清洁机器人设计成员及分工:指导老师:徐晓冬智能清洁机器人设计测控技术与仪器(2)班 CK Star 摘要:智能清洁机器人是内置智能芯片,能自动识别判断家庭环境,计算行走路径,自动清扫地面上的灰尘,自动清理毛发和碎物,低电压自动返回充电。
智能清洁机器人具有智能计算机系统、自动螺旋导航系统和传感器感应头。
可以对房间做出测量,自动清洁房间的每个角落、记录您的理想设置,避让墙壁、楼梯等障碍物,即使您把放到桌子上面它也不会掉下来。
随机配备的虚拟墙发射器可有效地阻止它进入您不想让它进入的地方。
适用范围:家庭,办公室,电脑房,可以有效清扫各种木地板、水泥地板、瓷砖地板以及短毛地毯。
采用全新智能控制系统,自动清扫,自动回充,智能分析,路径规划,智能防撞,以及遥控的功能,最终实现卫生清洁、空气净化加湿的效果。
关键词:传感器清洁机器人智能控制单片机系统目录一、背景及意义 (3)二、国内外研究现状 (3)三、总体功能 (4)四、工作主流程图 (5)五、各模块设计 (6)1、传感部分........................................................................................6 1)超声波传感器............................................................................6 2)红外测距传感器........................................................................7 3)接触式传感器............................................................................7 4)红外光电传感器 (7)2、控制部分 (8)3、驱动部分 (8)4、全方位移动机构 (9)5、吸尘及处理部分 (9)6、垃圾收集过程流程图 (11)7、电源部分 (11)六、性能参数 (12)七、结论与展望......................................................................................13 参考文献.. (14)一、背景及意义随着人们生活水平的提高,健康、舒适的家居环境越来越被更多的人所关注。
基于机器人的智能保洁服务系统设计

基于机器人的智能保洁服务系统设计随着人们生活水平的提高,对环境卫生的要求也越来越高。
传统的保洁方式已经难以满足现代人的需求,因此机器人智能保洁系统应运而生。
本文将就此话题展开探讨。
一、引言机器人保洁已经成为了未来的主流趋势。
它不仅可以提高工作效率,还可以减少人力成本和提高清洁质量。
因此,建立机器人保洁系统已经是时代的需要。
在本文中,我们将介绍机器人保洁系统的设计和实现。
二、机器人保洁系统机器人保洁系统是一种基于机器人技术的创新型保洁系统。
它可以代替人工进行保洁工作,使我们的生活更加便捷。
机器人保洁系统具有以下基本特点:1. 高度智能化:机器人保洁系统具有较高的智能化程度,它可以根据环境的情况进行巡逻和清洁,并自动避开障碍物。
2. 综合性:机器人保洁系统不仅可以进行地面的保洁工作,还可以进行天花板、墙壁等高空部位的清洁工作。
3. 高效性:机器人保洁系统可以高效地完成保洁任务,从而提高了保洁效率和减少了人力成本。
三、机器人保洁系统设计原理机器人保洁系统的设计原理主要分为以下几个方面:1. 传感器技术:机器人保洁系统采用了多种传感器技术,如激光、红外线等,以便于系统自动控制、监测防止碰撞和避开障碍物2. 嵌入式系统:机器人保洁系统采用了嵌入式系统,具有较高的控制精度,可以更精确地对机器人进行控制,从而提高了保洁效率。
3. 机器视觉技术:机器人保洁系统还采用了机器视觉技术,通过机器视觉算法,以识别保洁环境中存在的污物。
4. 高精度传动系统:机器人保洁系统采用了高精度传动系统,可以更加准确地进行定位和操作,保证了机器人的运行稳定性。
四、机器人保洁系统的实现机器人保洁系统的实现主要包含以下几个方面:1. 机器人硬件平台的设计:机器人的硬件平台包括电机、传感器、控制器等组成部分。
在设计机器人硬件平台时,需要根据具体的保洁任务要求进行设计,从而保证机器人的稳定性、灵活性和安全性。
2. 机器人软件平台的设计:机器人软件平台需要涉及机器人的控制、定位、导航、传感器数据处理等方面。
《清扫机器人控制系统的实现与改进》范文
《清扫机器人控制系统的实现与改进》篇一一、引言随着科技的飞速发展,智能家居逐渐成为现代家庭生活的重要组成部分。
其中,清扫机器人作为智能家居的代表之一,以其高效、便捷的特点赢得了消费者的广泛喜爱。
然而,清扫机器人的性能与效率很大程度上取决于其控制系统的设计与实现。
本文将探讨清扫机器人控制系统的实现过程及其后续的改进策略。
二、清扫机器人控制系统的实现1. 硬件设计清扫机器人的硬件部分主要包括主控芯片、电机驱动模块、传感器模块(如红外传感器、超声波传感器等)以及电源模块等。
主控芯片是整个系统的核心,负责处理传感器数据、控制电机驱动等任务。
电机驱动模块则负责驱动清扫机器人的电机,使其能够按照预设的路径进行移动。
传感器模块则用于感知周围环境,帮助机器人进行路径规划与避障。
2. 软件设计软件部分主要包括操作系统、算法以及用户界面等。
操作系统负责管理硬件资源,提供稳定的运行环境。
算法则是控制系统的核心,包括路径规划、避障算法、清扫模式等。
用户界面则用于接收用户的操作指令,并将操作指令转化为机器人的行动指令。
3. 控制系统实现在硬件与软件设计的基础上,通过编程实现控制系统的各项功能。
首先,通过传感器数据感知周围环境,然后根据路径规划算法计算出最优的移动路径。
接着,通过电机驱动模块控制机器人的移动,同时根据避障算法避开障碍物。
最后,通过用户界面接收用户的操作指令,并转化为机器人的行动指令。
三、清扫机器人控制系统的改进策略1. 优化算法针对清扫机器人的路径规划与避障算法进行优化,提高机器人的工作效率与清扫效果。
例如,采用更加先进的路径规划算法,使机器人能够更快地找到最优路径;或者改进避障算法,提高机器人在复杂环境下的避障能力。
2. 增加智能功能通过增加更多的传感器和智能识别技术,使清扫机器人具备更多的智能功能。
例如,增加摄像头和图像识别技术,使机器人能够识别不同类型的垃圾并进行分类清扫;或者增加语音识别功能,使机器人能够根据用户的语音指令进行操作。
《清扫机器人控制系统的实现与改进》范文
《清扫机器人控制系统的实现与改进》篇一一、引言随着科技的飞速发展,智能家居已成为现代家庭生活的重要组成部分。
其中,清扫机器人作为智能家居的代表之一,其控制系统是实现其高效、智能工作的核心。
本文将详细介绍清扫机器人控制系统的实现过程及其后续的改进措施。
二、清扫机器人控制系统实现1. 硬件设计清扫机器人控制系统硬件主要包括机器人主体、电池、电机驱动、传感器等部分。
其中,机器人主体采用先进的机械结构设计,以实现高效的清扫效果;电池为机器人提供持续的动力支持;电机驱动则负责驱动机器人行进;传感器则用于实现机器人的避障、定位等功能。
2. 软件设计软件设计是清扫机器人控制系统的核心。
通过编写控制算法,实现对机器人的导航、路径规划、避障等功能。
同时,软件还需与用户界面进行交互,以便用户能够方便地控制机器人。
在软件实现过程中,我们采用了模块化设计思想,将系统分为传感器数据处理、电机控制、路径规划等模块。
每个模块独立负责特定的功能,使得系统更加稳定、易于维护。
三、控制系统改进措施1. 优化算法针对清扫机器人在工作过程中可能出现的路径规划不合理、避障能力不足等问题,我们通过优化算法来提高机器人的工作效率和安全性。
例如,采用更先进的路径规划算法,使机器人能够更高效地完成清扫任务;通过改进避障算法,提高机器人在复杂环境中的避障能力。
2. 增强传感器性能传感器是清扫机器人实现避障、定位等功能的关键部件。
为了提高机器人的性能,我们计划对传感器进行升级,采用更先进的传感器技术,提高其精度和稳定性。
此外,我们还将对传感器数据进行实时处理和分析,以便机器人能够更好地适应各种环境。
3. 引入人工智能技术为了进一步提高清扫机器人的智能化程度,我们将引入人工智能技术。
通过机器学习算法,使机器人能够自主学习和优化清扫策略;通过语音识别技术,实现用户与机器人的自然交互;通过图像识别技术,使机器人能够识别地面上的障碍物和污渍程度,以便更好地完成清扫任务。
基于人工智能的自动化清洁机器人设计与实现

基于人工智能的自动化清洁机器人设计与实现自动化清洁机器人是一种基于人工智能的技术创新,它能够通过传感器和算法的结合,主动感知环境中的污垢,并采取相应的措施进行清洁。
本文将为您介绍基于人工智能的自动化清洁机器人的设计与实现的相关内容。
一、智能软件设计1. 环境感知算法为了使清洁机器人能够准确感知环境中的污垢,并做出相应的清洁措施,必须采用高效的环境感知算法。
该算法可以通过利用传感器获取环境信息,并通过对信息的处理和分析,实现对污垢的识别和定位。
常用的环境感知算法有计算机视觉、深度学习等,通过这些算法的应用,清洁机器人可以准确地找到并清洁污垢。
2. 路径规划算法在设计自动化清洁机器人时,路径规划算法的使用是必不可少的。
该算法能够根据环境信息和清洁机器人的运动能力,规划出机器人的清洁路径。
常见的路径规划算法有A*算法、RRT算法等,通过这些算法的运用,清洁机器人可以高效地清扫整个区域,避免重复清洁和错过清洁。
3. 自适应学习算法为了提高清洁机器人的智能化水平,可以采用自适应学习算法。
该算法能够使机器人根据不同的环境情况和清洁任务进行学习,并根据学习结果做出相应的调整。
通过自适应学习算法的应用,清洁机器人可以不断改进清洁效果,提高清洁的准确性和效率。
二、硬件设计1. 传感器传感器是自动化清洁机器人的重要组成部分。
常见的传感器包括激光雷达传感器、摄像头传感器、红外传感器等。
这些传感器能够感知环境中的障碍物、污垢等信息,并将信息传输给智能软件进行处理。
通过合理配置和使用传感器,清洁机器人可以更好地感知环境,完成清洁任务。
2. 运动控制系统运动控制系统是指清洁机器人中的驱动器、电机和控制器等组成部分。
通过这些组件的协同工作,清洁机器人可以进行灵活的移动和精确的定位。
同时,运动控制系统也需要与智能软件进行有效的通信,以实现路径规划和环境感知等功能。
3. 电池和充电系统清洁机器人需要长时间工作,并保持不间断的清洁能力,因此需要一个高效的电池和充电系统。
清扫机器人控制系统的实现与改进的开题报告

清扫机器人控制系统的实现与改进的开题报告一、题目清扫机器人控制系统的实现与改进二、研究背景和意义随着人们生活水平的提高和生活节奏的加快,家庭劳动力的短缺和对家庭卫生的要求越来越高,清扫机器人逐渐成为家庭清扫的必备物品。
清扫机器人的普及也为我们的生活带来了便利,但其控制系统的稳定性、灵活性和智能化程度也成为限制其发展和应用的瓶颈因素。
因此,对清扫机器人控制系统的实现和改进研究具有重要的现实意义和理论价值。
三、研究内容和思路本研究拟从以下几个方面进行探讨:1. 清扫机器人的硬件平台和系统框架设计研究。
2. 清扫机器人的机器视觉和传感器融合及信息处理与分析的研究。
3. 清扫机器人的控制算法与路径规划的研究。
4. 清扫机器人的智能决策和远程控制的研究。
5. 清扫机器人的实验测试及效果评估。
四、研究方法和技术路线本研究采用的研究方法主要有文献调查法、实验研究法和案例分析法。
文献调查法主要是针对国内外相关文献以及最新研究成果进行搜集和分析;实验研究法则通过搭建清扫机器人实验平台进行系统测试和数据分析;案例分析法则通过分析国内外已有的清扫机器人案例,总结不同设计方案存在的优点和缺陷,为本研究提供借鉴和参考。
五、预期成果本研究预计在清扫机器人控制系统的实现和改进方面做出如下贡献:1. 提出清扫机器人的系统框架设计方案,为清扫机器人的发展和应用提供理论和技术支持。
2. 实现清扫机器人机器视觉和传感器融合,并通过信息处理与分析提高清扫机器人的工作效率和清扫质量。
3. 优化清扫机器人的控制算法和路径规划算法,提高其运动控制的稳定性和精度。
4. 增加清扫机器人的智能决策和远程控制功能,提高其应用范围和灵活性。
5. 进行清扫机器人的实验测试及效果评估,为后续的研究和应用提供参考和借鉴。
六、研究进度安排第一年:1. 文献调查和理论准备,系统框架设计和机器视觉研究。
2. 搭建清扫机器人实验平台,编写相关控制算法和路径规划算法,并进行实验运动控制测试。
基于机器人技术的智能保洁系统设计

基于机器人技术的智能保洁系统设计一、引言如今,机器人技术已经在不同领域里得到了广泛应用,智能保洁系统作为其中的一种应用形式,已经在商场、餐厅、医院等公共场所里开始起到了越来越重要的作用。
本文将探讨基于机器人技术的智能保洁系统设计。
二、智能保洁系统的概述智能保洁系统是指集成机器人技术、传感器技术、信息技术等多种技术的一种智能化保洁服务系统。
智能保洁系统使用机器人代替传统保洁员的手工清洁工作,保证了清洁效率,而且在过程中减少了污染风险。
与此同时,智能保洁系统还能提供定制化的保洁服务,并且具有数据分析和远程监控等功能。
三、智能保洁系统的设计1.硬件设计智能保洁系统硬件设计主要包括机器人、传感器、地图制作和通信功能等。
机器人是智能保洁系统的核心,需要具有自主性、可编程性、自适应性和可扩展性等特点。
在机器人系统中,硬件方面的要求包括强大的计算能力,高精度的导航能力和精确的执行能力。
机器人应当具备人机交互界面,使得保洁服务更为便捷。
传感器的作用是感受环境信息和提供数据反馈,主要包括视觉传感器、声音传感器、温度传感器、湿度传感器、行进轮传感器等。
使用传感器可以使得机器人获取地面状况、负载、光线和交通情况等多方面信息,更好地完成保洁任务。
地图设计是实现智能保洁系统导航、路径规划等任务的基础。
地图设计应符合机器人扫地机器人的设计和地面状况布局,为机器人规划行走路径提供基础数据。
因此,地图制作是机器人导航控制的核心,影响着整个智能保洁系统的工作效率。
通信功能是保证智能保洁系统实时控制和远程监控的重要因素。
通信系统方便地传输清洁过程中的数据,同时还能将追踪和诊断信息传递回现场和维护团队。
2.软件设计软件是智能保洁系统的核心部分,主要包括操作系统、控制算法、数据处理和监控等。
机器人的程序应当结合多种作业方式使用,针对不同的使用环境,可以进行人工辅助、自主巡航和智能规划等模式。
同时,程序也要能够应付突发情况,如障碍物的出现等。
一种新型智能清洁机器人及其控制方法

一种新型智能清洁机器人及其控制方法矫玉菲;侯荣国;苏秋平;刘瑶;陈保胜【摘要】通过研制新型智能清洁机器人应用在卫生清洁服务领域以实现各种公共场所以及居民楼内部的卫生清洁工作。
该智能清洁机器人主要由行走及攀爬机构、自动拖地/吸尘装置、控制系统、智能识别模块等部分组成。
该装置通过增加带辐片式轮组的行走及攀爬机构,可实现机器人在平地行走和爬楼梯之间的转换;通过自动升降吸尘装置清理收集各种垃圾、尘土,经电动滚子式拖把将地面清理干净;其控制系统采用单片机作为核心部件,与智能控制模块相结合且具有语音识别功能和红外线接收功能,可控制机器人的各种行为,最终实现各种场地的卫生清洁工作。
【期刊名称】《制造业自动化》【年(卷),期】2013(000)024【总页数】4页(P26-29)【关键词】清洁机器人;攀爬机构;单片机;语音遥控;红外遥控【作者】矫玉菲;侯荣国;苏秋平;刘瑶;陈保胜【作者单位】山东理工大学机械工程学院精密与特种加工省级重点实验室,淄博255049;山东理工大学机械工程学院精密与特种加工省级重点实验室,淄博255049;山东理工大学机械工程学院精密与特种加工省级重点实验室,淄博255049;山东理工大学机械工程学院精密与特种加工省级重点实验室,淄博255049;山东理工大学机械工程学院精密与特种加工省级重点实验室,淄博255049【正文语种】中文【中图分类】TP2420 引言随着现代社会人们生活水平的提高、生存理念和生活品位的不断提升,服务型机器人必将成为人们生活必不可少的工具和伙伴。
各种场合的卫生清洁问题一直困扰着我们,由于工作环境多种多样(例如平地、斜坡和台阶等),工作流程繁琐,所需清理的垃圾也不尽相同,不仅劳动量大,而且工作效率低,每年国家都要对环境的清洁问题投入大量的人力、物力和财力,而目前市场上的清洁机器人存在功能单一、适应性差及智能化程度低等诸多问题,针对以上问题,研制新型智能清洁机器人,将科技与服务相融合,以优化生活环境。
《清扫机器人控制系统的实现与改进》范文

《清扫机器人控制系统的实现与改进》篇一一、引言随着科技的不断进步,智能生活成为了现代社会发展的重要方向。
清扫机器人作为智能家居的重要一环,其控制系统的实现与改进对提高用户体验和效率具有重要意义。
本文将探讨清扫机器人控制系统的基本原理、实现方法及未来改进方向。
二、清扫机器人控制系统概述清扫机器人控制系统主要由硬件和软件两部分组成。
硬件部分包括传感器、电机、电池等,用于实现机器人的移动和清洁功能;软件部分则负责控制机器人的运动轨迹、清扫模式以及与其他设备的通信等。
一个完善的控制系统能确保机器人在各种环境下稳定运行,提高清洁效率。
三、清扫机器人控制系统的实现(一)硬件实现1. 传感器系统:通过搭载如红外传感器、超声波传感器等设备,使机器人能够感知周围环境,进行障碍物检测和识别。
2. 电机与驱动:选择高性能的电机和驱动系统,保证机器人在复杂地形的稳定性和清扫效率。
3. 电池系统:选用容量大、寿命长的电池,为机器人提供足够的续航能力。
(二)软件实现1. 路径规划与导航:通过算法实现机器人的路径规划和导航,使机器人能够高效地完成清洁任务。
2. 控制系统:通过中央处理器对传感器数据进行处理,控制电机的运行,实现机器人的自动控制和调整。
3. 人机交互:通过蓝牙或Wi-Fi等通信技术,实现与手机或其他设备的连接,方便用户进行操作和控制。
四、清扫机器人控制系统的改进方向(一)增强自主性通过优化算法和传感器系统,提高机器人的自主性,使其能够在没有人为干预的情况下,更好地适应各种环境和清洁需求。
例如,通过深度学习和图像识别技术,使机器人能够识别不同类型的污渍和地面材质,选择合适的清洁方式。
(二)提升导航能力采用先进的路径规划和导航技术,提高机器人的导航能力和精确度。
例如,引入激光雷达和全球定位系统等技术,使机器人能够在更复杂的环境中进行导航和定位。
(三)增强人机交互体验优化人机交互界面,提高用户体验。
例如,通过语音识别和语音合成技术,实现与用户的自然语言交互;通过智能推荐功能,根据用户的清洁习惯和需求,自动调整清洁模式和参数。
智能型水面垃圾清理机器人控制系统的设计与研究

智能型水面垃圾清理机器人控制系统的设计与研究目录1. 内容概括 (3)1.1 研究背景 (3)1.2 研究目的与意义 (5)1.3 论文结构概述 (6)2. 文献综述 (7)2.1 机器人技术概述 (8)2.2 水面垃圾清理需求与现状 (9)2.3 机器人控制系统设计方法及特点 (11)2.4 相关研究成果与经验 (12)2.5 未来研究方向与趋势 (13)3. 系统需求分析 (15)3.1 功能需求 (16)3.2 性能指标 (17)3.3 设计限制与约束 (18)4. 系统总体设计 (19)4.1 机器人的硬件架构 (20)4.2 软件架构选型 (22)4.3 数据采集与处理 (24)4.4 控制系统核心模块设计需求 (25)5. 核心模块详细设计与实现 (26)5.1 图像处理与识别模块 (28)5.2 自主导航与路径规划模块 (29)5.3 垃圾抓取与运输模块 (30)5.4 避障与杨烤盘上情景应对模块 (31)5.5 能量管理与充电模块 (32)6. 系统集成与测试 (34)6.1 硬件集成实施 (35)6.2 软件集成开发与测试平台 (37)6.3 接口与通信协议测试 (38)6.4 整体系统集成测试与仿真验证 (39)7. 结果与讨论 (41)7.1 实验结果分析 (43)7.2 性能测试评估指标 (44)7.3 故障分析与改进 (45)7.4 用户反馈与后续优化建议 (47)8. 结论与展望 (48)8.1 总结研究主要贡献 (49)8.2 系统应用的实际效果 (50)8.3 未来研究方向与科学建议 (51)1. 内容概括随着城市化进程的加速和人类生活水平的提高,水环境污染问题愈加严峻。
水面垃圾污染尤为突出,严重影响着生态环境和人们生活质量。
针对水面垃圾清除需求,本论文设计并研究了一套智能型水面垃圾清理机器人控制系统。
该系统集成了多传感器数据融合、路径规划、控制算法以及垃圾识别技术,实现了智能化自动清除水面垃圾的功能。
家居智能清扫机器人系统设计

家居智能清扫机器人系统设计本文设计了一台家居智能清扫机器人,详细阐述了系统的总体构成,硬件电路设计和软件程序设计方案。
该机器人能实现移动、垃圾清扫、自主避障等功能,能够在家庭、图书馆、展览馆等室内环境中进行清扫作业。
该智能清扫机器人的推广应用能够很大程度的提高工作效率,降低劳动成本。
标签:清扫机器人单片微型计算机传感系统随着计算机技术与人工智能技术的发展,智能家居已成为现在电子行业的热门话题,机器人的应用更是受到人们的关注。
服务型机器人已经渗透到了我们的生活、工作的各个领域,为了能够彻底的将人们从家居清洁工作中解放出来,深入研究清扫机器人这类服务型机器人变得越来越重要。
1清扫机器人的总体设计智能清扫机器人在室内环境下运动,实现清扫、避障、路径规划等功能,利用自身各个系统部件的调节与控制,尽可能遍历每一个角落,实现清扫的智能化。
机器人的时间记录功能可以实现定时清扫,在完成清扫之后自动回到起始点。
机器人将自身的感知功能和控制功能结合起来,实现路径的规划与避障等功能。
机器人的清扫功能较为完善,在运动的过程中,它将地面上的垃圾清扫到一起,集中拾取到垃圾箱内。
根据机器人功能需求分析,设计系统整体结构如图1所示。
[1]2清扫机器人硬件设计2.1控制核心模块设计。
清扫机器人的控制系统采用微控制器STC89C52作为核心,它能负责指令的接收与发送,控制电机的转向,完成清扫、避障等功能。
如图1所示,处理器与多个模块相连接,有红外避障传感器、超声波测距传感器、测速光电编码器、电机驱动器接口模块、状态显示器、无线通信接口等,这些模块在微控制器的控制下,互相协调工作,保证了清扫机器人各项功能的实现。
2.2车体结构设计。
为了满足机器人的性能要求,机器人的机械结构应该具有稳定性,运动灵活性和足够强度等特点,同时尺寸要小,容量要大,重量要轻。
清扫机器人的机械结构主要由外部躯壳、小车底盘、驱动轮、传感器、垃圾清扫模块等组成。
小车的外部躯壳和底盘采用铝合金框架,以增大其坚固性,减轻重量,传感器安装在小车的适当部位,用导线连接,使小车重心降低提高小车的稳定性。
一种新型智能清洁机器人测控系统的设计
夏
莉阿
c ntols s e ; bs a l voda c l o ihm ; u o r y t m o t ce a i n e a g rt a—
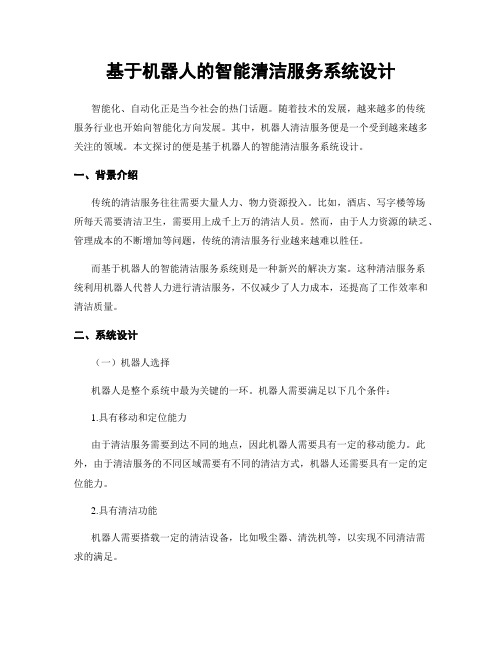
工作模式选择l I 吸尘系统l l 语音模块
图 1 系统 原 理
t no o o r o m usc ntol
设计 将控 制器核 心 系统 、 传感 器 系统 、 走驱 动及相 6 TP 4 .
文献 标识 码 : B
文章编 号 : 0 1 2 5 (0 7 O 1 0 — 2 7 2 0 )8—0 4 0 0 6— 4
Ab t a t Thi p pe p e e t t e e i n n sr c : s a r r s n s h d sg a d i p e e a i n o h e s e—c n r ls s e f m lm nt to ft e m a ur o t o y t m or
摘 要 : 绍 一种 新型 智 能 清 洁机 器A a 控 系统 介 .1 ' l 的设 计 与 实现 , 用 8位 单 片机 S T 9 5 4 C 作 采 S 8 E 5R
为控 制 器 , 动 轮 采 用 2 直 流 电机 独 立 驱 动 , 超 移 路 由
感技 术 以及 移动 机器 人 技 术等 技 术 的迅 速 发 展 , 智 能清 洁机器 人控制 系统 的研究 和开发 已具 备 了坚 实 的基 础和 良好的发 展前景 。吸尘系统 在原 理上 与传
a w t pe i t li e t la n o t n ne y n e lg n ce ni g r bo .T h e s em f— l u e— c ntols s e s s a r o r y t m u e n 8一 bi m ir c nto1e t c o o r 1r SST8 E5 4RC a t i de n nt DC m o o s 9 5 nd wo n pe de t r
基于机器人的智能清洁服务系统设计
基于机器人的智能清洁服务系统设计智能化、自动化正是当今社会的热门话题。
随着技术的发展,越来越多的传统服务行业也开始向智能化方向发展。
其中,机器人清洁服务便是一个受到越来越多关注的领域。
本文探讨的便是基于机器人的智能清洁服务系统设计。
一、背景介绍传统的清洁服务往往需要大量人力、物力资源投入。
比如,酒店、写字楼等场所每天需要清洁卫生,需要用上成千上万的清洁人员。
然而,由于人力资源的缺乏、管理成本的不断增加等问题,传统的清洁服务行业越来越难以胜任。
而基于机器人的智能清洁服务系统则是一种新兴的解决方案。
这种清洁服务系统利用机器人代替人力进行清洁服务,不仅减少了人力成本,还提高了工作效率和清洁质量。
二、系统设计(一)机器人选择机器人是整个系统中最为关键的一环。
机器人需要满足以下几个条件:1.具有移动和定位能力由于清洁服务需要到达不同的地点,因此机器人需要具有一定的移动能力。
此外,由于清洁服务的不同区域需要有不同的清洁方式,机器人还需要具有一定的定位能力。
2.具有清洁功能机器人需要搭载一定的清洁设备,比如吸尘器、清洗机等,以实现不同清洁需求的满足。
3.安全性高由于机器人运行的环境大都是公共场所,因此其安全性需求高。
机器人需要具备避障功能、自动停机功能等,以保证安全性。
(二)系统架构智能清洁服务系统的架构如下图所示:图中,机器人通过搭载各种清洁设备进行清洁。
同时,系统配备了相应的AI算法,以实现机器人自主清洁,并通过场景感知、自动规划等功能提高清洁质量和效率。
此外,系统还具备安全保护和维护管理等功能。
(三)系统功能智能清洁服务系统的功能可以分为以下几个方面:1.自主清洁机器人能够根据场景信息、任务信息等自主规划清洁路线,自动完成清洁任务。
2.场景感知系统通过相应传感器,对周围环境进行感知,并对场景进行分析,为机器人提供定位、路径规划等信息。
3.路径规划机器人根据场景感知信息,自主进行路径规划,快速到达清洁目标地点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0 引言移动机构是清洁机器人的主体,决定了清洁机器人的运动空间,一般采用轮式结构。
传感器系统一般采用超声波传感器、红外光电传感器、接触传感器等构成多传感器系统。
随着近年来控制技术、传感技术以及移动机器人技术等技术的迅速发展,智能清洁机器人控制系统的研究和开发已具备了坚实的基础和良好的发展前景。
吸尘系统在原理上与传统立式吸尘器相同,主要是在结构设计上更多考虑结构尺寸、集成度以及一些辅助机构的合理布置和利用,以此来提高能源利用率和工作效率。
本文主要研究智能清洁机器人测控系统的设计与实现,最终目标是通过软硬件的合理设计,使智能清洁机器人能够自动避开障碍物,实现一般家居环境下的自主清洁工作。
1 测控系统组成及功能智能清洁机器人测控系统主要包括控制器核心系统、传感器系统和驱动系统等。
其原理如图1所示。
基于清洁机器人自身体积尽可能小的原则,本设计将控制器核心系统、传感器系统、行走驱动及相关电路集成在一块电路板上。
为防止干扰,通过光电隔离器件将各模块在电气上隔离开来。
利用超声波传感器、红外反射式传感器和接触传感器组成多传感器系统,检测信号经调理电路处理后送控制器;采用8位单片机SST89E554RC作为控制器,控制器对传感器信号加以判断,根据判断结果,选定相应的控制策略,并控制语音系统发出相应的报警信号;在相应的控制策略下,通过专用驱动器驱动直流电机,带动驱动轮,两轮独立驱动,实现避障功能;同时,控制器控制小型双风机真空吸尘系统对经过的地面进行必要的清扫。
图1 系统原理该新型智能清洁机器人实验平台如图2所示,该平台为圆形结构,两轮独立驱动,具备完整的吸尘系统和电源系统等功能模块。
最终将在该平台上对本文所介绍的测控系统的性能进行实验验证。
图2 智能清洁机器人实验平台2 测控系统硬件设计2.1 CPU控制模块CPU采用美国SST公司制造的8位单片机SST89E554RC。
器件使用与8051完全相同的指令集,并与标准的8051器件管脚对管脚兼容。
片内拥有1 kB字节RAM空间,3个16位定时计数器,4个8位I/O端口,拥有可编程计数阵列(PCA,可提供5路256级PWM调速,可通过全双工增强型串口实现人机通讯。
依据SST89E554RC单片机的引脚特性,在实际设计中,各电机驱动信号由单片机P1口输出,左右驱动电机占用P1.1~P1.6共6个端口(其中 P1.3和P1.6作为PWM调速信号输出端口使用,吸尘风机和起尘电机分别占用P1.0和P1.7口;红外反射式传感器和接触传感器检测信号分别送给 P2口的P2.0~P2.7共8个端口;超声波接收器信号经调理后送人外部中断INT1(P3.3口;2个触摸式选择屏的触摸信号经处理后分别送给 P3.4口和P3.5口。
2.2 驱动模块直流电机所需的驱动电压、驱动电流均比较大,因此采用双H桥高电压大电流驱动芯片L298N作为电机驱动芯片。
L298N是推挽式功率放大专用集成电路器件,直流驱动电流总和可达4A,其内部具有2个完全相同的PWM功率放大回路,拥有PWM调速功能。
在控制电路中,考虑到单片机会受到驱动部分的干扰,因此采用了光电藕合器TLP521,把控制部分和驱动部分在电气上隔离开来。
采用8个1N5822高速大电流肖特基二极管组成续流保护电路,消除电机在起停、制动及换向时产生的反电势。
系统工作时,单片机P1口输出的控制信号经过驱动器芯片74HC245和光电拥合器之后输入电机驱动芯片L298N,控制电机动作。
当需要调速时,只需改变PWM波(本设计中由单片机P1.3和P1.6端口产生的占空比即可,理论上可以实现256级调速。
2.3 障碍物检测模块2.3.1 超声波检浏部分超声波是一种一定频率范围的声波,频率为40kHz的超声波信号在空气中的传播效率最佳。
本文选用中心频率40kHz,测距范围在5m以内的普通超声波传感器。
传感器发射探头和接收探头安装在机器人正前方,系统工作时,通过汇编程序由P3.7口产生精确的40kHz发射脉冲,每隔25ms发射一组脉冲,每组的脉冲个数取6~10个,以保证发射波具备良好的传播性和反射性。
发射波遇到障碍物反射回来,被接收器接收,转变成电信号脉冲,对该信号进行放大、滤波、比较和整形等处理后送入单片机外部中断口INT1,触发单片机外部中断,进入中断处理程序,获取从发射波发出到收到反射波时的时间间隔即测距时间,由此即可根据超声波测距原理计算出障碍物的距离。
主程序中设定机器人行走过程中距离障碍物的最小距离,当被测距离小于最小距离时,控制器向驱动系统发出避障指令,避开障碍物。
本设计中利用软件延时去除串扰带来的误操作,即在发射波发出一段时间后,再打开外部中断,避免发射波不经反射就直接被接收器接收而引起假中断。
2.3.2 红外反射式传感器检测模块该模块用于主动探测机器人周边障碍物和地面落差。
选用JY043W型红外反射式传感器,该型传感器调理电路简单,安装调试方便,每一路的检测距离可以达到 7cm,满足本文设计的需要。
该部分由6路检测单元组成,其中在机器人左前方和右前方各安装2路,配合超声波传感器实现周边障碍物的检测。
另2路分别安装在机器人前端左下方和右下方,探头距离地面4cm,用于检测地面是否有台阶等落差,防止机器人跌落。
红外反射式传感器具体工作过程为,发现障碍物时,发射管发出红外信号遇到障碍物反射回来,接收管接收到反射信号后导通,则信号处理电路的输出端变为低电平,该低电平直接送入控制器P2的一个端口,当控制器检测到这个端口的低电平变化时则表明该方位发现障碍物。
2.3.3 接触传感器检刚模块接触传感器具有检测范围大、信号无需调理、占用控制器资源少等一系列优点。
本文选择小型接触开关作为接触传感器,安装在机器人前端的缓冲器上,作用在于通过轻微的碰撞接触,检测那些未能被超声波传感器和红外反射式传感器检测到杆状或微小障碍物,如座椅腿等。
3 测控系统软件设计3.1 传感器信息处理当各路传感器检测到障碍物时,控制器必须获得障碍物的准确信息后,才能发出正确的避障指令。
为了获得有效信息,程序代码中为每一路检测信息都设定一个标志位,主程序不断检测各个标志位的值的有效性,以此作为障碍物方位信息。
对于不同的传感器,其信息判断标志位有效值也可能不同。
在本文所提到的3种传感器中,超声波传感器的信号处理程序最为复杂,其流程如图3所示。
图3 超声波传感器信号处理程序流程3.2 驱动控制驱动控制模块是智能清洁机器人自主行为的执行机构。
根据传感器信息判断当前环境状态,对不同的障碍物信息,控制器将调用不同的避障策略,策略与驱动控制的动作组合指令相对应,通过左右驱动电机动作的有效协作,实现机器人前进、后退、转弯等自主动作。
单部电机的控制信号与电机动作之间的关系如表1所示,其中 P1.1和P1.2为电机方向控制信号端口,P1.3为PWM波调速端口,需要减速时只需要降低PWM波的占空比即可,理论上可以实现256级调速。
表1 控制信号与电机动作关系3.3 避障算法描述根据模糊控制思想并结合实际行走试验设计避障算法。
以传感器系统9路传感器的检测距离和障碍物所在的方位为模糊控制输入量,以驱动轮的前进、旋转和后退动作为模糊控制输出量。
超声波传感器检测最小距离设定为15cm,距离远;红外传感器检测距离为7cm,距离适中;接触传感器是在发生碰撞后才能检测到障碍物,因此检测距离最近。
据此设距离信号(记作:D的模糊语言集合为:D={近,中,远}设定其相应的语言变量,记作:ND=近,MD=中,LD=远以各路传感器在机器人上的安装位置作为障碍物所在方位(记作:A。
超声波传感器安装在正前方,在其左右两边依次是接触传感器、下方红外传感器和周边红外传感器。
则设方位信号的模糊语言集合为:A={最左,较左,左,左下,中,右下,右,较右,最右}设定其相应的语言变量,记作:BL=最左,ML=较左,L=左,LD=左下,M=中,R=右,RD=右下,MR=较右,BR=最右设机器人驱动轮的动作集合为:{右转,稍微右转,后退,减速,前进,稍微左转,左转}设定其相应的语言变量,记作:TR=右转,TRL=稍微右转,GB=后退,SD=减速,GA=前进,TLL=稍微左转,TL=左转对于清洁机器人来说,在避障的同时,还要能够对清洁区域进行遍历。
在保证避障和遍历的前提下,为了减少控制器的计算量并避免程序复杂化,本文采用逐一查询方式获得模糊控制量之一障碍物方位,根据障碍物方位即可获得另一输入量即机器人与障碍物间的距离。
容易理解,采用逐一查询方法意味着控制器获得的障碍物信息来自于最先被传感器系统检测到的障碍物,而且控制器将根据最先获得的障碍物信息来调用相应的避障策略。
因此,当有2个或2个以上方位有障碍物时,执行避障策略时机器人有可能与障碍物发生碰撞。
试验发现,只有当左边的最左、较左方位和右边的最右、较右方位都有一个或2个发现障碍物时,才有可能导致机器人与障碍物发生碰撞。
为了避免这种情况发生,将机器人左右两边都发现障碍物的情况也作为一个障碍物方位变量,不论机器人左右2边是同时发现一个还是2个障碍物,都仅设其模糊语言为左右,设定相应的语言变量为LR。
根据有利于避碰的原则,将障碍物方位信息的查询顺序确定为:LD,RD,LR,M,BL,BR,ML,MR,L,R(左下,右下,左右,中,最左,最右,较左,较右,左,右从机器人有效避障并保证尽量少的重复先前行走轨迹的角度出发,当确定了障碍物的方位和机器人离障碍物的距离后,我们希望模糊控制的输出量不仅仅是机器人动作集合中某一种动作,而是集合里某几种动作的合理组合。
因此,针对不同方位的障碍物信息,对机器人左右驱动轮动作集合的7种动作 (TR,TRL,GB,SD,GA,TLL,TL进行合理组合,即得到相应的合成输出量,记作Fi(i=1,2,3…。
根据前述方法,最终可归纳出 10种控制规则,即避障策略,如表2所示。
表2 控制规则表按照障碍物方位信息的查询顺序,其形式是:if(Ai and Dthen Fii=1,2,3 (10)按照此种方法,在不影响机器人有效避障和相关功能的情况下,有效避障的控制规则大大减少,使避障算法简单化。
4 实验结果在智能清洁机器人实验平台上对整个测控系统进行测试。
实验在一间约10m2的房间中进行,在房间中随机摆放几件日常物品作为障碍物,将通过智能清洁机器人的行走实验,对本文所述的智能清洁机器人测控系统的软硬件性能进行验证。
实验中,智能清洁机器人始终保持直线行走,遇到障碍物时,根据障碍物信息选择合适的避障策略避开障碍物,然后继续保持直线行走,直到遇到下一个障碍物。
实验结果表明,该测控系统工作可靠,避障算法有效可行,智能清洁机器人能够自动回避障碍物,可以在无人情况下自主工作,能够实现家居环境下的智能化清扫。