车载雷达传动装置设计
车载雷达液压升降系统设计

车载雷达液压升级系统设计摘要随着国际形势的动荡,局部战争的不断爆发,现代武器装备的不断更新,现代战争已进入了电子战,信息战时代,传统的机动型雷达已经不能满足现代战争的需要。
各国为了提高自己的防卫,跟踪,识别和反击能力,高机动地面雷达应运而生。
天线快速,可靠地机动架设和撤收是车载雷达的基本要求之一。
按传动系统的不同,雷达天线升降机构可分为机电式和液压式。
与机电式相比,在输出同样功率的条件下,液压式的体积和质量小,承载能力大,可以完成较大重量雷达天线的架设,还可大大简化机械结构,减少机械零部件的数目,也便于实现自动控制。
随着科技的发展,液压式传动系统已逐渐在雷达天线升降机构中被采用。
本设计采用一种翻转式液压举升机构及其液压系统,可实现对较大型天线的高架,并且在天线的举升过程中,天线的姿态不变,架撤收过程平稳,可靠,快速关键词:液压升降系统;汽车;雷达;The design of car radar hydraulic upgrade systemAbtractTurmoil as the international situation, local wars breaking out, constantly updated, modern weapons and equipment of modern warfare has entered the electronic warfare, information warfare era, the traditional mobile radar can not meet the needs of modern warfare. Countries in order to improve their defense, tracking, identification, and fight back ability, high-motorized ground radar came into being.Fast, reliable motorized antenna erection and dismantling is one of the basic requirements of the automotive radar. For differences in the transmission system, the radar antenna lifting mechanism can be divided into electro-mechanical and hydraulic. With electromechanical compared to the same output power conditions, the hydraulic volume and mass of small carrying capacity, the larger weight of the radar antenna can be completed erection, but also greatly simplifies the mechanical structure, reducing the number of mechanical parts, also easy to achieve automatic control. With the development of science and technology, the hydraulic drive system has been gradually the radar antenna lifting mechanism is used. This design uses a flip-hydraulic lifting mechanism and its hydraulic system, can be elevated to the larger antenna, and in the process of lifting of the antenna, the antenna of the same attitude, erecting the closing process is smooth, reliable, fastKeywords: hydraulic lift system; cars; radar;目录1 绪论 (1)1.1 课题研究背景 (1)1.2 雷达车的特点 (1)1.3 国内外机动雷达现状分析 (2)1.4 设计的目的及任务 (3)2 举升系统总体方案设计 (5)2.1天线升降装置对液压系统的要求 (5)2.2总体技术方案 (5)2.3系统主要技术参数的确定 (7)2.4举升机构液压系统及工作原理的设计 (9)2.5设计特点分析 (11)3 举升机构的液压系统设计计算 (12)3.1 主液压缸的设计 (12)3.1.1 液压缸缸体厚度计算 (13)3.2.2 液压缸长度确定 (13)3.2.3 缸体的材料 (14)3.3.4 活塞杆直径的设计 (14)3.3.5 活塞杆的材料 (15)3.2 副液压缸的设计 (17)3.2.1 液压缸缸体厚度计算 (17)3.3 活塞的设计 (18)3.3.1 活塞的材料 (18)3.4 导向套的设计与计算 (19)3.4.1 最小导向确定长度H的 (19)3.4.2 导向套的结构 (20)3.4.3 导向套的材料 (20)3.5 端盖和缸低的设计与计算` (20)3.5.1 缸盖的材料 (21)3.6 缸体的长度确定 (22)3.7 缓冲装置的设计 (22)3.8 密封件的选用 (22)3.9 动密封部位密封圈的选用 (23)3.10 液压缸的安装连接结构 (23)3.11 液压缸油口的设计 (24)4 液压泵的参数计算 (26)4.1 泵的工作环境 (26)4.2 主液压缸液压泵流量的确定 (27)4.3 副缸液压泵流量的确定 (27)4.4 主缸电动机功率的确定 (28)4.5 副缸电动机功率的确定 (28)4.7 油箱容积的确定 (29)4.8 油管的选择 (30)4.9 液压系统热性能验算 (30)5 液压系统的安装 (32)5.1 安装的基本要求: (32)5.1.1 系统安装前注意事项 (32)5.1.2 系统安装时的注意事项 (32)5.1.3 系统安装方法 (34)5.2液压系统的调试 (35)5.2.1 调试的目的 (35)5.2.2 调试的步骤 (35)5.2.3 调试的主要内容 (36)结论 (38)参考文献 (39)致谢 (40)毕业设计(论文)知识产权声明 ............................................. 错误!未定义书签。
大型雷达天线结构中的传动链设计探讨

大型雷达天线结构中的传动链设计探讨【摘要】综合分析了大型雷达天线设备中,动态要求较高的经纬式天线座常用的圆柱齿轮减速箱的设计,以及易发生的一些问题和原因。
【关键词】雷达天线;传动链;圆柱齿轮;刚度1.引言在雷达天线结构系统中,传动链是天线座极其重要的组成部分,直接影响整个天线系统的动态性能。
减速箱作为传动链的关键组成单元,其重要性可想而知。
齿轮传动作为一种传动形式,被广泛应用,较其他传动形式其具有如下特点:1)瞬时传动比恒定,传动精度高;2)速度和传递功率的范围大,可用于高速、中速、低速传动;3)传动效率高,一对高精度的渐开线圆柱齿轮,效率可达99%以上;4)结构紧凑,适用于近距离传动;5)制造成本较高。
2.设计方案拟订阶段根据工作情况,进行载荷估算。
天线结构系统的主要载荷为:风载荷、惯性载荷、摩擦力矩。
与伺服系统的电气设计人员共同协商,选择执行元件,并在此基础上,选择总传动比。
最佳总传动比的确定一般遵循如下原则:折算负载峰值力矩最小原则;折算负载均方根力矩最小原则;转矩储备最大原则;惯量匹配原则。
确定传动链的级数和各级传动比。
传动链的级数和各级传动比的确定一般遵循如下原则:折算转动惯量小原则;折算转角误差小原则;重量轻原则。
在满足强度、刚度的前提下,根据结构空间的允许和实际加工的可能性,尽可能取大的末级传动比,以减小负载轴上的折算惯量、折算转角误差。
减速箱内传动链级数选择按折算转动惯量小原则确定。
如果级数大于四级,从高速级到中间级按折算转动惯量小原则、折算转角误差小原则,传动比逐级递增;从中间级开始按重量轻原则,传动比逐级递减。
在随后按每级传动比确定相啮合齿轮齿数时,尽量使大、小齿轮齿数互质,从而各级传动比将带无限不循环小数,这样对均衡磨损有好处。
对关键零部件进行初步的强度、刚度估算,并合理配置传动链对于传动链的高速级须进行齿面接触强度校核、齿根弯曲强度校核。
传动链的末级一般转速较低、载荷较大。
车载雷达传动装置设计

车载雷达传动装置设计基本参数与要求:◆雷达直径φ3 m,重约60KG。
◆雷达具有展开和收藏功能,展开或收藏时间小于1.5min。
◆雷达展开状态能实现正反方位搜索旋转,转速为6r/min,定位精度为0.5。
◆抗风能力:10级风能正常工作,12级风可生存。
◆车内允许空间为:(长X宽X高)800X700X500。
◆车外工作温度:±40℃,贮藏温度:±60℃一绪论1.1 引言雷达作为一种可以主动地、全天候探测远距离目标的探测器,是获取目标信息的重要装备,在国防建设和国民经济发展中起着重要作用,在近年来发生的几次大型局部战争中,雷达在以信息化为特点的高科技战争中的重要作用得到了充分显示。
固定式雷达线系统的覆盖空间是固定和有限的,只能对事先确定好的空域有效,不能灵活机动,而且需要进行基站建设,投资大。
而车载雷达系统可以移动,车载雷达天线系统可以随时幵到需要的前沿上,而且由于机动性好可以迅速转移,战场生存率比固定站高得多,且不需要进行基站建设,具有机动灵活、投资小等优点,因而目前在军用、民用等领域应用得到了广泛应用。
1.2 车载雷达简介1.2.1 车载雷达的发展现状雷达技术首先应用于军用,随着全世界对道路交通安全、汽车安全技术的不断重视,雷达技术开始转为民用,主要用于交通的管制、雷达测速以及汽车主动安全技术方面。
国外对车载雷达的研究开始比较早,在以德国、美国、日本、法国等为代表的主要西方发达国家内展开。
随着汽车电子技术、嵌入式技术以及信号处理技术的发展,推动了车载雷达的研制与应用,世界各国掀起了研发车载雷达的热潮。
车载毫米波雷达的研究始于20世纪60年代。
典型代表是德国ADC公司生产的ASR100毫米波雷达采用脉冲测距方式。
戴姆勒奔驰、日产、福特等汽车公司广泛开发的汽车主动避撞系统以及自适应巡航系统多采用该款雷达。
日本丰田公司与Denso公司、三菱公司合作开发的电子扫描式毫米波雷达,采用调频连续波测距方式,结构紧凑、抗干扰性能好。
车载雷达的系统设计与性能分析研究
车载雷达的系统设计与性能分析研究随着车辆自动驾驶技术的快速发展,车载雷达系统作为重要的感知设备在车辆安全性能中起到了至关重要的作用。
本文将对车载雷达的系统设计和性能分析进行研究,探讨其在车辆自动驾驶和智能交通系统等领域的应用。
一、车载雷达系统设计1. 雷达系统的组成部分车载雷达系统主要由发射机、接收机、天线以及信号处理单元组成。
发射机负责产生高频电磁波,并将其发送至外界;接收机接收从目标反射回来的电磁波信号;天线负责发送和接收电磁波信号;信号处理单元将接收到的信号进行处理和分析。
2. 雷达天线的选择与布局在车载雷达的系统设计中,天线是至关重要的组成部分。
天线的选择和布局将直接影响系统的性能和效果。
常见的雷达天线包括单极点天线、双极点天线和阵列天线。
根据不同的应用需求,选择适合的天线类型,并合理布置位置,以确保雷达系统能够获取准确而稳定的信息。
3. 信号处理算法信号处理算法是车载雷达系统中的重要环节。
根据不同的应用需求,可以采用不同的信号处理算法来提高雷达系统的检测和跟踪能力。
常用的几种算法包括最小二乘法、卡尔曼滤波、多普勒处理和波束形成等。
选择合适的信号处理算法,可以大大提升雷达系统的灵敏度和抗干扰能力。
二、性能分析研究1. 检测距离与分辨率车载雷达的性能指标之一是检测距离和分辨率。
检测距离指的是雷达系统能够检测到目标的最大距离,而分辨率则是指雷达系统能够识别目标的能力。
在设计过程中,需要根据实际需求平衡这两个指标,以达到最佳的系统性能。
2. 雷达系统的抗干扰能力车载雷达系统面临着各种干扰源,如电源干扰、多径效应干扰、天气干扰等。
为了保证雷达系统的正常工作,需要对这些干扰源进行分析,并采取相应的抗干扰措施。
例如,可以采用数字滤波器来抑制电源干扰,采用多普勒处理算法来抵抗多径效应干扰。
3. 雷达系统的精度与速度测量车载雷达系统在自动驾驶和智能交通系统中要求能够精确测量目标的位置和运动速度。
为了实现对目标的准确追踪,需要对雷达系统的精度和速度测量能力进行研究和分析。
10汽车倒车雷达系统设计

10汽车倒车雷达系统设计汽车倒车雷达系统是一种非常重要的汽车安全辅助系统,它能够有效地帮助驾驶员在倒车时避免碰撞和保护车辆周围的行人和物体免受损害。
本文将介绍汽车倒车雷达系统的设计原理、工作流程以及如何选择和安装倒车雷达系统。
一、设计原理汽车倒车雷达系统的设计原理是利用超声波传感器来探测车辆周围的障碍物,通过测量超声波反射的时间来计算障碍物的距离和位置。
当系统检测到障碍物距离车辆过近时,会发出警告声或显示警告信息,提醒驾驶员及时采取行动。
二、工作流程汽车倒车雷达系统的工作流程通常包括以下几个步骤:1.探测障碍物:当车辆进入倒车状态时,倒车雷达系统开始工作,探测车辆周围的障碍物。
2.计算距离:系统通过测量超声波反射的时间来计算障碍物离车辆的距离,并将距离信息显示在车载显示屏上。
3.发出警告:当系统检测到障碍物距离车辆过近时,会发出持续的警告声或显示警告信息,提醒驾驶员及时采取行动。
4.辅助倒车:一些高端的倒车雷达系统还配备有辅助倒车功能,可以通过声音提示或图像指引帮助驾驶员完成倒车动作。
三、选择和安装选择适合自己车辆的倒车雷达系统非常重要,以下是选择和安装倒车雷达系统的一些建议:1.选择适合车辆尺寸和需求的倒车雷达系统,一般应选择覆盖车辆四周的全方位探测系统,以确保倒车时能够全面监测周围环境。
2.选择品质可靠的倒车雷达系统品牌,尽量选择有着较好口碑的品牌产品,保证系统的稳定性和可靠性。
3.在安装倒车雷达系统时,确保传感器位置合适,能够覆盖到车辆四周的障碍物,避免“盲区”出现。
4.确保电源连接正确,传感器安装牢固,避免在行驶过程中因传感器脱落或松动而影响系统的正常工作。
5.使用前仔细阅读使用说明书,熟悉系统的操作方法和功能,以充分发挥倒车雷达系统的作用,并提高倒车时的安全性。
综上所述,汽车倒车雷达系统是一种非常有效的汽车安全辅助系统,可以有效地帮助驾驶员在倒车时避免碰撞事故。
选择适合自己车辆的倒车雷达系统并正确安装和使用,将为您的驾驶带来更多的安全保障和便利。
某机载雷达伺服转台结构设计
第8期2018年4月No.8April,2018无论在和平时代,在本国国土领域内,获取可疑活动目标信息,保障领土领空领海安全;还是在战争时期,获知敌情,进行火力打击,搜索雷达装备是必不可少的国防利器。
相对于地面雷达系统,机载搜索雷达具有灵活机动、快速进出战场等优势,其作用越来越明显。
然而恶劣的使用环境也限制了机载搜索雷达的发展。
针对机载雷达所处的复杂热环境、力学环境以及电磁环境,本文在有限的空间和重量下,通过合理布局、润滑密封设计、力学仿真分析设计出满足要求的伺服转台。
以下就雷达伺服转台结构设计、驱动力矩计算、力学仿真分析进行详细论述。
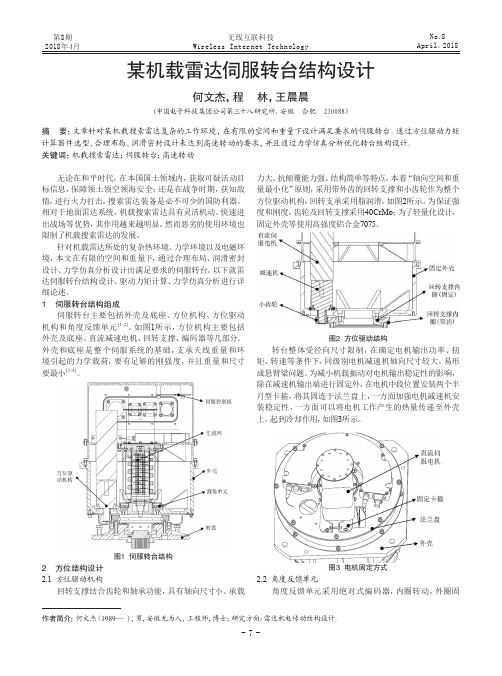
1 伺服转台结构组成伺服转台主要包括外壳及底座、方位机构、方位驱动机构和角度反馈单元[1-2]。
如图1所示,方位机构主要包括外壳及底座、直流减速电机、回转支撑、编码器等几部分。
外壳和底座是整个伺服系统的基础,支承天线重量和环境引起的力学载荷,要有足够的刚强度,并且重量和尺寸要最小[3-4]。
图1 伺服转台结构2 方位结构设计2.1 方位驱动机构回转支撑结合齿轮和轴承功能,具有轴向尺寸小、承载力大、抗倾覆能力强、结构简单等特点,本着“轴向空间和重量最小化”原则,采用带外齿的回转支撑和小齿轮作为整个方位驱动机构,回转支承采用脂润滑,如图2所示。
为保证强度和刚度,齿轮及回转支撑采用40CrMo;为了轻量化设计,固定外壳等使用高强度铝合金7075。
图2 方位驱动结构转台整体受径向尺寸限制,在确定电机输出功率、扭矩、转速等条件下,同级别电机减速机轴向尺寸较大,易形成悬臂梁问题。
为减小机载振动对电机输出稳定性的影响,除在减速机输出端进行固定外,在电机中段位置安装两个半月型卡箍,将其固连于法兰盘上,一方面加强电机减速机安装稳定性,一方面可以将电机工作产生的热量传递至外壳上,起到冷却作用,如图3所示。
图3 电机固定方式2.2 角度反馈单元角度反馈单元采用绝对式编码器,内圈转动,外圈固作者简介:何文杰(1989—),男,安徽无为人,工程师,博士;研究方向:雷达机电传动结构设计。
汽车倒车雷达系统设计

自动化控制应用系统设计报告书题目汽车倒车雷达系统设计院部名称龙蟠学院专业自动化班级组长姓名同组学生设计地点设计学时2周指导教师金陵科技学院教务处目录摘要 (3)1 绪论 (5)1.1 项目研究背景及意义 (5)2 总体设计方案及论证 (5)2.1 总体方案设计 (5)3 硬件实现及单元电路设计 (6)3.1 主控制模块 (7)3.2 电源设计 (8)3.3 超声波测试模块 (8)3.3.1 超声波的特性 (8)3.4 超声波传感器原理 (11)3.5 测距分析 (15)3.6 时钟电路的设计 (16)3.7 复位电路的设计 (16)3.8 声音报警电路的设计 (17)3.9 显示模块 (18)4 软件设计 (20)4.1 主程序工作流程图 (20)4.2 中断处理程序 (22)4.3 超声波探测程序 (26)4.4 蜂鸣器报警程序 (26)4.5 延时程序 (27)5 调制及性能分析 (28)6 总结 (29)7 参考文献 (30)附录 (31)附件1:原理图 (31)附件2:程序 (32)附件3:实物图 (42)摘要汽车倒车雷达作为泊车或者倒车时的安全辅助装置,能以声音或更为直观的图形显示告知驾驶员周围障碍物的情况,在一定程度上减少了驾驶员泊车、倒车和起动车辆时因前后左右探视所引起的困扰,并帮助驾驶员扫除视野死角和视线模糊的障碍,提高了驾驶的安全性。
本设计依托ATMEL公司的STC89C52单片机和超声波传感器,构架出汽车倒车雷达的感测系统;利用LED发光二极管表示传感器探测范围内是否有障碍物。
当在探测范围内有障碍物时,发光管以一定频率闪烁,闪烁的频率和到障碍物距离成反比,距离越近频率越高;同时利用蜂鸣器提示报警,用声调的高低警示驾驶者与障碍物距离。
关键词:倒车雷达超声波测距报警单片机Design of warning system for Radar in Back Car Abstract:Reversing Radar is the safety and assistant devices when parking or reversing a vehicle, it can tell drivers circs about the around barrier with voice or a more intuitive display, release the surrounded visit puzzle from drivers when parking, reversing and start vehicles, and to help drivers clean off dead ends and the limitation of blur vision, improve the security of driving. The Design use Single Chip STC89C52 of ATMEL and Ultrasonic Sensor measure distance to achieve Ultrasonic Reversing Radar; Using LED Sensor to detect whether there are barriers, when detecting barriers within the scope, the LED will blink with a confirm frequency, the blink frequency of LED is determined by the distance of barrier, the nearer distance and the higher frequencies.At the same time, The Voice Alarm warning, detecting the distance, and demonstrate the distance of barrier.Keywords:Reversing Radar Ultrasonic Measure Warning Microprocessor1.绪论1.1 项目研究背景及意义:由于超声测距是一种非接触检测技术,不受光线、被测对象颜色等的影响,较其它仪器更卫生,更耐潮湿、粉尘、高温、腐蚀气体等恶劣环境,具有少维护、不污染、高可靠、长寿命等特点。
汽车倒车雷达系统设计
摘要陪同着我国汽车行业的高速成长,特别是近几年来,开端进入私人车时期,汽车的数量正在慢慢增长,造成交通越来越拥挤.驾驶员开端越来越放心行车安然,个中倒车最为典范.同时汽车驾驶员中非职业汽车驾驶员的比例也在逐年增长.在公路.街道.泊车场.车库等拥挤狭小的地方倒车时,驾驶员既要前瞻,又要后顾,稍微不当心就会产生追尾事宜.据相干统计查询拜访标明:七分之一的汽车碰撞变乱是因汽车倒车时汽车的后视才能缺少造成的.本文设计的倒车雷达体系就是针对汽车倒车时人无法目测车尾与障碍物的距离而设计的距离显示体系.本体系是将微盘算机技巧与超声波的测距技巧.传感器技巧.单片机技巧等相联合,可以检测到汽车倒车时障碍物与车尾的距离,经由过程液晶显示屏显示距离,并依据现实距离发出报警等级.驾驶员只要在驾驶室里就能做到心中稀有,极大的进步了泊车和倒车时的安然和效力.本设计重要由超声波发射.吸收电路.单片机处理模块.LED数码显示以及声光报警等部分构成,在论文中重要介绍了体系的硬件设计部分,其次就是对超声波测距的道理及办法也做了较为具体的介绍.论文起首描写本设计的整体思绪,然后介绍各个部分设计中的细节问题.最终实现了可以或许探测车后的请求.症结词:超声波倒车雷达距离显示单片机目录1 绪论11.1 倒车雷达的产生布景11.2 设计的意义及请求11.3 倒车雷达的成长史21.4 论文的构造构成32 倒车雷达的总体设计计划42.2 超声波传感器63硬件设计83.1 超声波发射电路83.2 超声波显示及掌握部分电路103.2.1 对AT89C51的描写及其功效特征1012233.2.6 温度测量电路144软件设计164.1 软件设计的请求174.2 超声波测距的算法设计174.3 主程序1894.5 显示子程序和报警子程序204.6 报警刷新程序21总结23申谢24参考文献25附录1:体系总电路26附录2:部分程序271绪论跟着现代社会的飞速成长,汽车这一交通对象正在为越来越多的人所运用,但是随之而来的问题也显而易见,那就是跟着车辆的增多,交通变乱的频仍产生,由此导致的人员伤亡和财宝损掉数量惊人.对于公路交通变乱的剖析标明,八成以上的车祸事因为驾驶员反响不及所引起的,超出六成的车辆相撞属于追尾相撞,其余则属于正面相撞.奔驰汽车公司对各类交通变乱的研讨标明:若驾驶员可以或许提早一秒意识到有变乱安全并采纳响应的精确措施,则绝大多半的交通变乱都可以防止.是以,大力研讨开辟如汽车防撞装配等主动式汽车帮助平装配置,削减驾驶员的累赘和断定错误,对于进步交通安然将起到重要的感化.显然,此类产品的研讨开辟具有极大的实现意义和辽阔的运用远景.1.1 倒车雷达的产生布景倒车雷达又称泊车帮助体系,是汽车泊车安然帮助装配,能以声音或者更为直不雅的显示告诉驾驶员四周障碍物的情形,解除了驾驶员泊车和起动车辆时前后阁下探视所引起的困扰,并帮忙驾驶员清除了视野逝世角和视线隐约的缺点,进步了安然性.超声波测距因为其可以或许进行非接触测量和相对较高的测量精度,越来越被人们所看重.就今朝形势来看,汽车市场的快速成长将带动倒车雷达市场的繁华.国内倒车雷达主流市场已经开端有进口高级汽车向中低档汽车成长.技巧上向着单芯片功效成敏锐度更高.可视化成长,装备趋于小型化.人道化.智能化等偏向成长.由此可见,超声波汽车倒车雷达体系将会在人类往后的生涯中扮演越来越重的脚色,为人类的成长作出重要进献.1.2 设计的意义及请求跟着汽车的敏捷增长,泊车难已经是不争的事实,狭小的泊车场地经常令有车一族无所适从,稍掉慎,则闯祸,很不便利.固然每辆车都有后视镜,但不成防止的都消失一个后视盲区.倒车雷达是汽车泊车或者倒车时的安然帮助装配,能以声音或者更为直不雅的显示告诉驾驶员驾驶车辆四周障碍物的情形,解除了驾驶员倒车时前后阁下探视所引起的困扰,并帮忙驾驶员清除了运用逝世角和视线隐约的缺点,进步驾驶的安然性.倒车雷达的普遍运用是迫在眉睫的,是当今汽车必不成少的装备.1.3 倒车雷达的成长史平日,倒车雷达由超声波传感器(俗称探头).掌握器和显示器(或蜂鸣器)等部分构成.倒车雷达一般采取超声波测距道理,在掌握器的掌握下,由传感器发射超声波旌旗灯号,当碰到障碍物时,产生回波旌旗灯号,传感器吸收到回波旌旗灯号后经掌握器进行数据处理.断定出障碍物的地位,由显示器显示距离并发出其他警示旌旗灯号,得到实时警示,从而使驾驶者倒车时做到心中稀有,使倒车变得更轻松.在几年的时光里,跟着技巧成长和用户需求的变更,倒车雷达经由了大致六代的成长. 第一代:倒车时经由过程喇叭提示.“倒车请留意”!想必很多人还记得这种声音,这就是倒车雷达的第一代产品,如今只有小部分商用车还在运用.只要司机挂上倒档,它就会响起,提示四周的人留意.从某种意义上说,它对司机并没有直接的帮忙,不是真正的倒车雷达. 价钱便宜,根本属于镌汰产品. 第二代:采取蜂鸣器不合声音提示驾驶员.这是倒车雷达体系的真正开端.倒车时,假如车后1.8米-1.5米处有障碍物,蜂鸣器就会开端工作.蜂鸣声越急,暗示车辆离障碍物越近.但没有语音提示,也没有距离显示,固然司机知道有障碍物,但不克不及肯定障碍物离车有多远,对驾驶员帮忙不大. 第三代:数码波段显示具体距离或者距离规模.这代产品比第二代进步很多,可以显示车后障碍物离车体的距离.假如是物体,在1.8米开端显示;假如是人,在0.9米阁下的距分开端显示.这一代产品有两种显示方法,数码显示产品显示距离数字,而波段显示产品由三种色彩来差别:绿色代表安然距离,;黄色代表警告距离,;红色代表安全距离,必须停滞倒车. 第三代产品把数码和波段组合在一路,但比较适用,但装配在车内不太美不雅. 第四代:液晶荧屏动态显示.这一代产品有一个质的飞跃,特别是屏幕显示开端消失动态显示体系.不必挂倒档,只要动员汽车,显示器上就会消失汽车图案以及车辆四周障碍物的距离,色彩清楚英俊,外表美不雅,可以直接粘贴在内心盘上,装配很便利.不过液晶显示器外不雅虽精细,但敏锐度较高,抗干扰才能不强,所以误报也较多. 第五代:魔幻镜倒车雷达.联合了前几代产品的长处,采取了最新仿生超声雷达技巧,配以高速电脑掌握,可全天候精确地测知2米以内的障碍物,并以不合等级的声音提示和直不雅的显示提示驾驶员.魔幻镜倒车雷达可以把后视镜.倒车雷达.免提德律风.温度显示和车内空气污染显示等多项功效整合在一路,并设计了语音功效.因为其外形就是一块倒车镜,所以可以不占用车内空间,直接装配在车内后视镜的地位.并且色彩格式多样,可以按照小我需乞降车内装潢选配. 第六代:整合影音体系.它在第五代产品的基本上新增了很多功效,属于第六代产品,是专门为高级轿车临盆的.从外不雅上来看,这套体系比第五代产品更为精细典雅;从功效上来看,它除了具备第五代产品的所有功效之外,还整合了高级轿车具备的影音体系,可以在显示器上不雅看DVD影像. 今朝市场上倒车雷达品牌多达二十几种,价钱从上百元到一两千元不等,选购倒车雷达可以从如下方面斟酌:功效.机能.外不雅.质量.装配.价钱等.1.4 论文的构造构成该论文重要包含倒车雷达体系设计产生的布景.总体计划.硬件设计和软件设计四个大部分.第一部分对倒车雷达的产生布景,设计的意义和其成长史做了简略论述.第二部分重要介绍了超声波测距的道理和超声波传感器.第三部分也是该设计的焦点部分,对硬件体系中的每一部分都做了较为具体的介绍.第四部分则为软件设计环节,重要说清楚明了产品内部的一些运用程序.2倒车雷达的总体设计计划准电压进行比较,当旌旗灯号电压大于基准电压时,比较器输出正脉冲,传给单片机,将距离数字显示在LED数码显示管上,电压旌旗灯号再转化为声音旌旗灯号经由过程超声波发射电路以声音的情势发射,提示驾驶员.2.1.1超声波测距道理经由过程超声波发射装配发出超声波,依据吸收器接到超声波时的时光差就可以知道距离了.这与雷达测距道理类似. 超声波发射器向某一偏向发射超声波,在发射时刻的同时开端计时,超声波在空气中传播,途中碰着障碍物就连忙返回来,超声波吸收器收到反射波就连忙停滞计时.(超声波在空气中的传播速度为340m/s,依据计时器记载的时光t,就可以盘算动身射点距障碍物的距离(s),即:s=340t/2).图2-2即为超声波测距的具体流程图.图2-2 超声波测距流程图2.1.2 测量与掌握办法声波在其传播介质中被界说为纵波.当声波受到尺寸大于其波长的目的物体阻拦时就会产生反射;反射波称为反响.假如声波在介质中传播的速度是已知的,并且声波从声源到达目的然后返反响源的时光可以测量得到,从声波到目的的距离就可以精确地盘算出来.这就是本体系的测量道理.因为此超声波测距仪可以实现双向测距,所以需进行测距选择,而这个测距选择就以主动选择功效来实现.理论盘算图2-3 测距的道理如图2-3所示为反射时光,是运用检测声波发出到吸收到被测物反射回波的时光来测量距离其道理如图所示,对于距离较短和请求不高的场合我们可以为空气中的声速为常数,我们经由过程测量回波时光T 运用公式:2T C S ⨯=个中,S 为被测距离.V 为空气中声速.T 为回波时光21T T T +=可以盘算出旅程,这种办法不受声波强度的影响,直接耦合旌旗灯号的影响也可以经由过程设置“时光门”来加以战胜.如许可以求出距离:()221T T C S -=555时基电路振荡产生40Hz 的超声波旌旗灯号.其振荡频率盘算公式如下:()()5109243.1C R R f ⨯⨯+=2.1.4测量盲区在以传感器脉冲反射方法工作的情形下,电压很高的发射电脉冲在鼓励传感器的同时也进入吸收部分.此时,在短时光内放大器的放大倍数会下降,甚至没有放大感化,这种现象称为壅塞.不合的检测仪壅塞程度不一样.依据壅塞区内的缺点回波高度对缺点进行定量评价会使成果偏低,有时甚至不克不及发明障碍物,这时须要留意的.因为发射声脉冲自身有必定的宽带,加上放大器有壅塞问题,在接近发射脉冲一段时光规模内,所请求发明的缺点往往不克不及被发明,这段距离,称为盲区,具体剖析如下:当发射超声波时,发射旌旗灯号固然只保持一个极短的时光,但停滞施加发射旌旗灯号后,探头上还消失必定余振(因为机械惯性感化).是以,在一段较长的时光内,加在吸收放大器输入端的发射旌旗灯号幅值仍具有必定的幅值高度,可以达到限幅电路的限幅电平VM;另一方面,吸收探头上吸收到的各类反射旌旗灯号却远比发射旌旗灯号小,即使是离探头较近的概况反射回来的旌旗灯号,也达不到限幅电路的限幅电平,当反射面离探头愈来愈远,吸收和发射旌旗灯号相隔时光愈来愈长,其幅值也愈来愈小.在超声波检测中,吸收旌旗灯号幅值需达到划定的阀值Vm,亦即吸收旌旗灯号的幅值必须大于这一阀值才干使吸收旌旗灯号放大器有输入旌旗灯号.2.2 超声波传感器2.2.1超声波传感器道理及构造超声波传感器是运用超声波的特征研制而成的传感器.超声波是一种振动频率高于声波的机械波,由换能晶片在电压的鼓励下产生振动产生的,它具有频率高.波长短.绕射现象小,特别是偏向性好.可以或许成为射线而定向传播等特色.超声波传感器重要材料有压电晶体(电致伸缩)及镍铁铝合金(磁致伸缩)两类.电致伸缩的材料有锆钛酸铅(PZT)等.压电晶体构成的超声波传感器是一种可逆传感器,它可以将电能转变成机械振荡而产生超声波,同时它吸收到超声波时,也能转变成电能,所以它可以分成发送器或吸收器.超声波传感器包含三个部分:超声换能器.处理单元和输出级.起首处理单元对超声换能器加以电压鼓励,其受激后以脉冲情势发出超声波,接着超声换能器转入接收状况(相当于一个麦克风),处理单元对吸收到的超声波脉冲进行剖析,断定收到的旌旗灯号是不是所发出的超声波的反响.假如是,就测量超声波的行程时光,依据测量的时光换算为行程,除以2,即为反射超声波的物体距离.把超声波传感器装配在适合的地位,瞄准被测物变更偏向发射超声波,就可测量物体概况与传感器的距离.超声波传感器的内部构造由压电陶瓷晶片.锥形辐射喇叭.底座.引线.金属壳及金属网构成,个中,压电陶瓷晶片是传感器的焦点,锥形辐射喇叭使发射和吸收超声波能量分散,并使传感器有必定的指向角,金属壳可防止外界力气对压电陶瓷晶片及锥形辐射喇叭的破坏.金属网也是起呵护感化的,但不影响发射与吸收超声波2.2.2超声波传感器的运用超声波传感器是运用超声波的特征研制而成的传感器.超声波是一种振动频率高于声波的机械波,由换能晶片在电压的鼓励下产生振动产生的,它具有频率高.波长短.绕射现象小,特别是偏向性好.可以或许成为射线而定向传播等特色.超声波对液体.固体的穿透本领很大,尤其是在阳光不透明的固体中,它可穿透几十米的深度.超声波碰着杂质或分界面会产生明显反射形成反射成回波,碰着运动物体能产生多普勒效应.是以超声波检测普遍运用在工业.国防.生物医学等方面.3硬件设计超声波倒车雷达体系设计有超声波发射电路.超声波吸收电路.电源电路.温度抵偿电路.声报警电路.单片机硬件接口电路及显示报警电路构成,该体系的焦点部分为机能较好的AT89C51单片机.3.1 超声波发射电路本设计是运用超声波专业产生电路或通用产生电路产生超声波旌旗灯号,并直接驱动换能器产生超声波.这种办法的长处是无需驱动电路,但缺点是灵巧性低.40KHz的超声波是运用LC震动电路振荡产生的,其振荡频率盘算公式如下:电路图如图3-1所示.发射电路重要由SN74LS00的两个与非门A.B与电阻.电容构成的多谐振荡器,调节RC选频收集的电位器RP1可调节谐振频率.单片机的P2.4端口掌握多谐振荡器的起振,当P2.4输出高电日常平凡,电路振荡,发射由震动电路产生的40kHz超声波,同时单片机的准时器/计数器开端计时;当P2.4输出低电日常平凡,电路停滞发射超声波旌旗灯号.A R6BR7RP1C1&&超声波发射P2.41K1.5K1K0.01uF图3-1 超声波发射电路3.1.1超声波吸收电路图3-2所示为超声波的吸收电路.电路由LM324的三个运算放大器A.B.C构成旌旗灯号放大电路.电感L1和电容C9构成选频电路,滤除40kHz以外的干扰旌旗灯号.二极管VD2和电容C12构成旌旗灯号半波整流滤波电路,将吸收到40kHz反射波交换旌旗灯号转化为近似的直流电压旌旗灯号.运算放大器D为电压比较器,40kHz反射波交换旌旗灯号转化的近似直流电压旌旗灯号与设定的基准电压比较,当旌旗灯号电压大于基准电压时,比较器输出正脉冲,三极管VT1导通,单片机并行口P1.0吸收负脉冲旌旗灯号,同时准时器.计数器产生准时中止,记载发射旌旗灯号与吸收旌旗灯号的时光距离,并转换为距离.图3-2 超声波检测吸收电路图超声波报警电路图3-3所示为超声波报警电路,封装为SN74LS00的两个与非门C.D构成的多谐振荡器,输出谐振频率约为800Hz的旌旗灯号,经集成功率放大器LM386放大图3-3 超声波声光报警电路3.2 超声波显示及掌握部分电路3.2.1 对AT89C51的描写及其功效特征AT89C51是一个低电压,高机能CMOS8位单片机带有4K字节的可反复擦写的程序存储器(PENROM).和128字节的存取数据存储器(RAM),这种器件采取ATMEL公司的高密度.不轻易丧掉存储技巧临盆,并且可以或许与MCS-51系列的单片机兼容.片内含有8位中心处理器和闪耀存储单元,有较强的功效的AT89C51单片机可以或许被运用到掌握范畴中.AT89C51供给以下的功效尺度:4K字节闪耀存储器,128字节随机存取数据存储器,32个I/O口,2个16位准时/计数器,1个5向量两级中止构造,1个串行通讯口,片内震动器和时钟电路.别的,AT89C51还可以进行0HZ的静态逻辑操纵,并支撑两种软件的节电模式.闲散方法停滞中心处理器的工作,可以或许许可随机存取数据存储器.准时/计数器.串行通讯口及中止体系持续工作.掉落电方法保管随机存取数据存储器中的内容,但震动器停滞工作并制止其它所有部件的工作直到下一个复位.3.2.2AT89C51单片机的道理及工作特色5l系列单片机中典范芯片(AT89C51)采取40引脚双列直插封装(DIP)情势,内部由CPU,4kB的ROM,256 B的RAM,2个16b的准时/计数器T0和T1,4个8b的I/O端I:IP0,P1,P2,P3,一个全双功串行通讯口等构成.特别是该系列单片机片内的Flash 可编程.可擦除只读存储器(E~PROM),使其在现实中有着十分普遍的用处,在便携式.省电及特别信息保管的仪器和体系中更为有效.该系列单片机引脚与封装如图3-4 所示.图5l条I/O线;2个16b准时/计数器;5个2.余暇方法:CPU工作.掉落电方法:保管下一次硬件复位.5l.充分运用他的片内资本,.单片机实现测距道理单片机发出超声波测距是经由过程不竭检测超声波发射后碰到障碍物所反射的回波,从而测动身射和吸收回波的时光差tr,然后求出距离S=Ct/2,式中的C为超声波波速.限制该体系的最大可测距离消失4个身分:超声波的幅度.反射的质地.反射和入射声波之间的夹角以及吸收换能器的敏锐度.吸收换能器对声波脉冲的直接吸收才能将决议最小的可测距离.为了增长所测量的笼罩规模.减小测量误差,可采取多个超声波换能器分离作为多路超声波发射/吸收的设计办法.因为超声波属于声波规模,其波速C与温度有关.稳压电源电路在各类电子装备中,直流稳压电源是必不成少的构成部分,它是电子装备独一的能量起源,稳压电源的重要义务是将50Hz 的电网电压转换成稳固的直流电压和电流,从而知足负载的须要,直流稳压电源一般由整流.滤波.稳压等环节构成.其电路图如图3-5所示.个中,变压器将交换电源(220V/50Hz)变换位符合整流电路所须要的交换电压;整流电路是具有但偏领导电机能的整流器件,将交换电压整流成单偏向脉动的直流电压;滤波电路滤去单向脉动直流电压中的交换部分,保存直流成分,尽可能供应负载腻滑的直流电压;稳压电路是一种主动调节电路,在交换电源电压摇动或负载变更时,经由过程此电路使直流输出电压稳固.20V交换电经由过程电源变压器变换成交换低压电源,再经由桥式整流电路D1~D4和滤波电容的整顿和滤波,在固定式三端稳压器LM7805的Vin和GND 两头形成一个其实不十分稳固的直流电压.此直流电压经由LM7805的稳压和电容滤波便在稳压电源的输出端产生了精度高.稳固度好的直接输出电压.如3-7所示的电路为输出电压为+5V.输出的电流 1.5A的稳压电源.它由电源变压器,桥式整流电路D1~D4,滤波电容C7.C8,防止自激电容C15.C16和一只固定式三端稳压器(7805)构成.图3-5 电源电路显示电路道理超声波测距仪显示模块电路如图3-6所示.经由过程单片机的25.26.27.28四个管脚的旌旗灯号掌握四个三极管的B极,运用三极管的开关特征,实现数码管的点亮,从而实现动态显示.采取LED 动态显示,数据经由PIC 芯片的盘算后传到LED上,显示精度是厘米.单片机AT89C51采取12MHz高精度的晶振,以获得较稳固的时钟频率,削减测量误差.单片机用P1.0端口输出超声波换能器所需的40KHz方波旌旗灯号,运用外中止0口检测超声波吸收电路输出的返回旌旗灯号.显示电路采取简略适用的3位共阳LED数码管用于显示车尾障碍物的距离,由单片机P0.0—P0.7接LED的a~dp八个笔段,经由过程软件以动态扫描方法显示.段码用74LS244驱动.图3-6单片机及显示体系电路图3.2.6 温度测量电路因为超声波的传播速度V受到空气中的温度.湿度.压强等身分的影响,个中温度的影响最为凸起,温度每升高1℃,速度增长约0.6m/s.是以在测量精度请求很高的场合,应经由过程温度抵偿对超声波的传播速度进行校订,以进步测量精度,减小误差.今朝,大多半温度测控体系在检测温度时,都采取温度传感器将温度转化为电量,经旌旗灯号放大电路放大到恰当的规模,再由A/D转换器转换成数字量来完成.这种电路构造庞杂,调试庞杂,精度易受元器件参数的影响.为此,运用一线性数字温度计即集成温度传感器DS18B20和单片机,构成一个高精度的数字温度检测体系.DS18B20数字式温度传感器与传统的热敏电阻温度传感器不合,可以或许直接读出被测温度值,并且可依据现实请求,经由过程简略的编程,实现9~12位的A/D 转换.因而,运用DS18B20可使体系构造更简略,同时靠得住性更高.温度测量规模从-55~+125℃,在-10~+85℃检测误差不超出0.5℃,而在全部温度测量规模内具有±2℃的测量精度至5.5V无需备用电源.它经由过程输出9位(二进制)数字来直接暗示所测量的温度值,温度值是经由过程DS18B20的数据总线直接输入CPU,无需A/D转换,并且读写指令,温度转换指令都是经由过程数据总线传入DS18B20.DS18B20数字温度传感器除了具有相当的测量规模和精度外,还具有温度测量精度和不受外界。
传感器课程设计--汽车倒车防撞雷达系统设计
汽车倒车防撞雷达系统设计摘要:本文在查阅分析了现有的几种不同测距原理后,确定了使用超声波测距,并对基于超声波测距的倒车雷达报警系统的设计进行了深入分析和研究。
该系统分为系统控制模块、超声波发射模块、超声波接受模块、温度采集模块和液晶显示及声光报警模块。
在硬件电路中,详细阐述了运用单片机技术实现的倒车雷达报警系统的测距实现原理,分析了以ATMEGA16单片机为主控单元的硬件系统和软件设计,并分别对每个模块进行了分析,使我们对该系统由较好的认识和理解。
关键词:倒车雷达超声波测距1 概述在现代社会中,随着汽车的增多和停车位日趋紧张,泊车成为很多车主头痛的问题,这时汽车倒车防撞报警系统就成了汽车的好助手。
汽车倒车防撞报警系统是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了倒车的安全性。
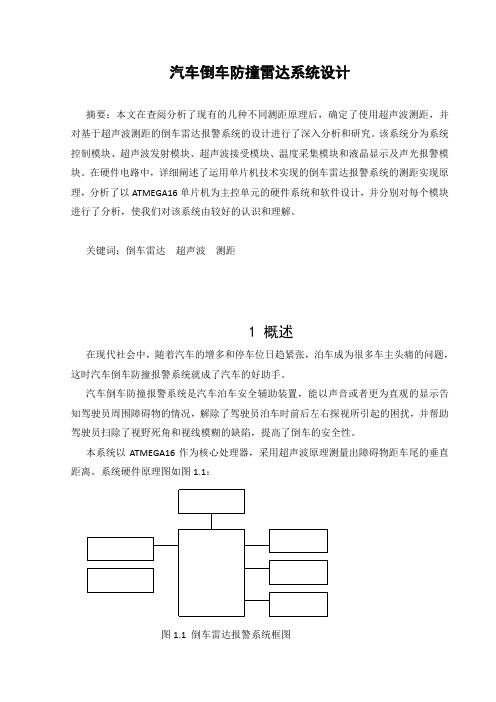
本系统以ATMEGA16作为核心处理器,采用超声波原理测量出障碍物距车尾的垂直距离。
系统硬件原理图如图1.1:图1.1 倒车雷达报警系统框图该系统整体设计思路如下:警报系统装于汽车尾部,与汽车倒车闸相连,当汽车倒车时,该报警系统开始工作。
ATMEGA16单片机为主控模块,将各个子模块联系起来共同工作,当超声波模块发出脉冲信号时,主控模块内部计数器开始工作。
超声波接收模块接到障碍物反射回来的声波后将信号传递给主控模块,主控模块内部的计数器计数停止,从而得到声波往返所用时间。
温度采集模块不断测试环境温度,并将此信息传递给主控模块。
主控模块根据温度得出此时超声波速度,进而计算出此时汽车尾部与障碍物的距离。
主控模块距离信息传递给液晶显示模块和声光报警模块,使液晶显示屏显示当前车尾与障碍物的距离,同时控制声光报警模块,当距离小于设定值时发出声光警报,从而提醒司机注意,防止倒撞。
2 系统硬件电路设计系统电路主要由三大部分组成:(1)超声波发射接收模块;(2)ATMEGA16单片机主控模块;(3)距离显示模块和声光报警模块。
车辆智能雷达系统设计方案
车辆智能雷达系统设计方案引言近年来,智能化技术的发展极大地改变了人类的生活方式。
其中,汽车智能化技术的发展显得尤为重要。
车辆智能雷达系统是现代汽车智能化的重要组成部分,旨在提升驾驶者的行车安全,以及改善驾驶体验。
本文将介绍一种车辆智能雷达系统的设计方案。
系统架构车辆智能雷达系统中包含多个组件,包括雷达信号处理单元、数据传输单元、数据计算和处理单元、以及数据显示单元。
其中,雷达信号处理单元主要负责处理雷达回波信号,以检测并定位车辆前方的障碍物;数据传输单元主要负责传输处理好的数据;数据计算和处理单元主要负责对处理好的数据进行计算和分析;数据显示单元主要负责将处理好的结果呈现给驾驶者。
系统功能车辆智能雷达系统通过判断与车辆前方障碍物的距离、速度和方位,以及车辆当前自身的状态,来提供以下几种功能:预警功能当车辆前方出现障碍物时,系统会通过声音、图像或震动等方式向驾驶者发出警告,提醒驾驶者注意行驶安全。
障碍物避让辅助功能当车辆前方出现障碍物时,系统可以根据车速、加速度和方向盘转角等信息,向车辆执行自动制动或纠正转向的操作,以帮助驾驶者避免碰撞障碍物。
自动泊车功能当车辆需要停车时,系统也可以根据车速、方向盘角度等信息,辅助驾驶者完成停车操作。
系统设计车辆智能雷达系统的设计应符合以下几个方面的要求:基本要求•频率范围:24GHz到安全/政府规定的更高频率;•测距范围:从几米到数百米;•空间分辨率:以幅度调制为基础的分辨率应小于15厘米,以时间编码为基础的分辨率应小于1纳秒;•默认安全方向:车辆前方;•默认客观时间:10ms或更短。
系统性能•鲁棒性:系统应对不同天气、路面、外部光线等条件具备良好的适应性;•睡眠模式:系统应支持睡眠模式,以减少能耗;•数据同步:不同部件之间的数据应保持同步,以确保系统稳定;•数据精确性:系统即使在高速行驶或突发情况下,也应能提供准确的预警和障碍物避让辅助功能;•稳定性:系统应能够长时间稳定运行,无需频繁维护。
车辆智能雷达系统设计方案
车辆智能雷达系统设计方案引言近年来,随着汽车工业的快速发展,人们对于汽车性能和安全性的要求越来越高。
为了保障车辆在街道和高速上行车安全,开发出一套完备的车辆智能雷达系统是非常必要的。
本文将介绍一种车辆智能雷达系统设计方案。
设计方案雷达传感器雷达传感器是车辆智能雷达系统的核心组件。
雷达传感器的作用是通过信号的反射和散射来检测障碍物的存在。
当前市面上有很多不同型号的雷达传感器。
根据市场情况和性价比,我们选择了市面上性能最为优秀的MIMO雷达。
MIMO雷达具有多个发射和接收天线,可以实现高精度的物体探测,并且在多路径信号干扰下也有更好的信号鉴别能力。
处理器雷达传感器可以实现物体检测,但是需要有一个高速的并行运算器对物体检测信号进行处理和分析。
为此,我们采用了HiSilicon的Kirin 970处理器,它在车载场景下具有十分优秀的性能和功耗比。
同时,Kirin 970支持神经网络处理单元(NPU),可以实现从传感器采集的数据中自动识别出物体的运动轨迹和类型。
车载设备为了实现车辆智能雷达系统功能的全面覆盖,我们还需要配备相应的车载设备,如行车记录仪、GPS导航系统、OBD电脑诊断接口等。
这些设备的作用在于帮助记录行车信息、分析车辆性能、快速准确反映车辆状态等。
同时,这些设备也会为车辆智能雷达系统提供信息支持。
技术难点在该车辆智能雷达系统的设计中,需要解决以下技术难点:1.大数据实时处理:MIMO雷达能够生成大量的数据,需要快速而准确地分析和处理这些数据。
2.经过墙体等场景复杂的物体探测:为了避免探测物体时的信号干扰,需要进行更加准确的信号处理,必要时需要使用更为高级的信号处理技术。
3.实现精确的运动轨迹分析:从传感器采集数据中自动识别出物体的运动轨迹和类型是一项技术难度很大的任务。
应用前景车辆智能雷达系统具有非常广阔的应用前景。
目前,汽车行业、交通监管机构、城市管理机构等都非常需要这种类型的系统。
在未来,车辆智能雷达系统有望在以下领域发挥越来越重要的作用:1.交通安全监测:车辆智能雷达系统可以实现各种类型交通工具的实时监测,并能够及时准确的反映交通拥堵情况以及交通事故风险。
某型机动式三坐标雷达结构总体设计

第36卷第6期2020年12月电4机械,打E lectro-M echanical Engineering•结构设计•D O I:10.19659/j.issn. 1008-5300.2020.06.003某型机动式三坐标雷达结构总体设计*赵承三,孙艳龙,张晋(中国电子科技集团公司第三十八研究所,安徽合肥230088)摘要:为了满足某型雷达高机动性能的要求,文中通过整车布局设计、多工作角度的举升机构设计等,使该雷达具有自动化架/撤能力和高机动特点。
对该雷达相关的结构设计及天线阵面精度指向分析等进行了详细 阐述,并在实际使用中进行了充分的工程试验验证。
天线阵面具有重复定位可靠性好、精度高等特点,实际 测试效果良好,实现了整机机动性指标要求。
该雷达的研制对后续类似雷达结构的系统设计具有一定的参考 价值。
关键词:机动雷达;结构总体;举升机构;指向精度中图分类号:TN958 文献标识码:A文章编号:1008-5300(2020)06-0012-04O verall D esign o f a M ob ile Three C oord in ate R adar StructureZHAO Chengsan, SUN Yanlong, ZH ANG Jin(The38th Research Institute of CETC^Hefei230088, China)Abstract: To meet the high maneuverability requirement of a radar,the whole vehicle layout design,multiangle lifting mechanism design etc.are carried out in this paper.As a result,the automatic erecting/withdrawing and high maneuverability of the radar are achieved.The relevant structure design and antenna array pointing precision analysis are described in detail and have been fully verified by engineering test in practice.The antenna array has the characteristics of high reliability and precision in repeated positioning and works well in practice,which meets the requirements of the overall mobility index.The development of this radar can provide reference for the subsequent system design of similar radar structure.K ey words: mobile radar;overall structure;lifting mechanism;pointing accuracy引言信息化战争的发展要求雷达具有较高的机动性 能,不仅能快速、准确地打击目标,还能有效地保护 自己。
自动化倒车雷达系统的设计与实现

自动化倒车雷达系统的设计与实现随着汽车产业的快速发展,倒车雷达系统作为一项重要的辅助驾驶技术,得到了广泛应用和普及。
本文将介绍自动化倒车雷达系统的设计与实现,并详细探讨其工作原理、关键技术以及未来发展趋势。
一、引言随着城市化进程的加速以及车辆保有量的快速增长,倒车事故的频发成为一个严重的社会问题。
倒车雷达系统作为一种有效的辅助设备,通过感知车辆周围环境的障碍物,提供准确的距离和方向信息,帮助驾驶员安全、高效地完成倒车操作。
二、工作原理1. 传感器系统自动化倒车雷达系统采用多种传感器来感知周围环境,常见的传感器包括超声波传感器、激光传感器以及摄像头等。
其中,超声波传感器是最常用的一种,可以通过测量超声波的反射时间来计算障碍物的距离。
2. 数据处理与算法传感器获取到的距离和方向信息将被送到控制单元进行处理。
控制单元通过特定的算法对传感器数据进行处理和分析,从而生成辅助驾驶的指令和反馈信息。
常见的算法包括距离计算、障碍物识别、碰撞预警等。
三、关键技术1. 数据融合与处理自动化倒车雷达系统中的传感器数据通常是多源异构的,如何对这些数据进行融合和处理是系统设计的关键。
数据融合算法可以将各种传感器的数据有效地结合起来,提高系统的准确性和可靠性。
2. 障碍物识别与警报倒车时容易出现诸如行人、其他车辆等障碍物,系统需要能够快速准确地识别这些障碍物,并及时向驾驶员发出警报。
障碍物识别算法的设计与实现是系统功能的核心之一。
3. 实时监测与响应自动化倒车雷达系统需要实时监测车辆周围环境的变化,并迅速响应驾驶员的操作指令。
系统的实时性和稳定性对于保障行车安全至关重要,需要利用高性能的硬件设备和优化的算法来实现。
四、实现效果与展望自动化倒车雷达系统已经在市场上得到广泛应用,并取得了显著的效果。
通过实时监测倒车过程中的障碍物,系统可以有效地帮助驾驶员避免倒车事故的发生。
未来,随着技术的不断发展,自动化倒车雷达系统将进一步提升准确性和可靠性,为驾驶员提供更全面的辅助服务。
车载雷达传动装置设计

车载雷达传动装置设计基本参数与要求:雷达直径© 3 m,重约60KG雷达具有展开和收藏功能,展开或收藏时间小于 1.5min雷达展开状态能实现正反方位搜索旋转,转速为6r/min,定位精度为0.5抗风能力:10级风能正常工作,12级风可生存。
车内允许空间为:(长X宽X高)800X700X500车外工作温度:土40C,贮藏温度:土60T一绪论1.1 引言雷达作为一种可以主动地、全天候探测远距离目标的探测器, 是获取目标信息的重要装备, 在国防建设和国民经济发展中起着重要作用, 在近年来发生的几次大型局部战争中, 雷达在以信息化为特点的高科技战争中的重要作用得到了充分显示。
固定式雷达线系统的覆盖空间是固定和有限的, 只能对事先确定好的空域有效, 不能灵活机动,而且需要进行基站建设,投资大。
而车载雷达系统可以移动,车载雷达天线系统可以随时幵到需要的前沿上, 而且由于机动性好可以迅速转移, 战场生存率比固定站高得多, 且不需要进行基站建设, 具有机动灵活、投资小等优点, 因而目前在军用、民用等领域应用得到了广泛应用。
1.2 车载雷达简介1.2.1 车载雷达的发展现状雷达技术首先应用于军用,随着全世界对道路交通安全、汽车安全技术的不断重视,雷达技术开始转为民用,主要用于交通的管制、雷达测速以及汽车主动安全技术方面。
国外对车载雷达的研究开始比较早,在以德国、美国、日本、法国等为代表的主要西方发达国家内展开。
随着汽车电子技术、嵌入式技术以及信号处理技术的发展,推动了车载雷达的研制与应用,世界各国掀起了研发车载雷达的热潮。
车载毫米波雷达的研究始于20世纪60年代。
典型代表是德国ADC公司生产的ASR10C毫米波雷达采用脉冲测距方式。
戴姆勒奔驰、日产、福特等汽车公司广泛开发的汽车主动避撞系统以及自适应巡航系统多采用该款雷达。
日本丰田公司与Denso公司、三菱公司合作开发的电子扫描式毫米波雷达,采用调频连续波测距方式,结构紧凑、抗干扰性能好。
车载雷达液压升降系统设计
车载雷达液压升级系统设计摘要随着国际形势的动荡,局部战争的不断爆发,现代武器装备的不断更新,现代战争已进入了电子战,信息战时代,传统的机动型雷达已经不能满足现代战争的需要。
各国为了提高自己的防卫,跟踪,识别和反击能力,高机动地面雷达应运而生。
天线快速,可靠地机动架设和撤收是车载雷达的基本要求之一。
按传动系统的不同,雷达天线升降机构可分为机电式和液压式。
与机电式相比,在输出同样功率的条件下,液压式的体积和质量小,承载能力大,可以完成较大重量雷达天线的架设,还可大大简化机械结构,减少机械零部件的数目,也便于实现自动控制。
随着科技的发展,液压式传动系统已逐渐在雷达天线升降机构中被采用。
本设计采用一种翻转式液压举升机构及其液压系统,可实现对较大型天线的高架,并且在天线的举升过程中,天线的姿态不变,架撤收过程平稳,可靠,快速关键词:液压升降系统;汽车;雷达;The design of car radar hydraulic upgrade systemAbtractTurmoil as the international situation, local wars breaking out, constantly updated, modern weapons and equipment of modern warfare has entered the electronic warfare, information warfare era, the traditional mobile radar can not meet the needs of modern warfare. Countries in order to improve their defense, tracking, identification, and fight back ability, high-motorized ground radar came into being.Fast, reliable motorized antenna erection and dismantling is one of the basic requirements of the automotive radar. For differences in the transmission system, the radar antenna lifting mechanism can be divided into electro-mechanical and hydraulic. With electromechanical compared to the same output power conditions, the hydraulic volume and mass of small carrying capacity, the larger weight of the radar antenna can be completed erection, but also greatly simplifies the mechanical structure, reducing the number of mechanical parts, also easy to achieve automatic control. With the development of science and technology, the hydraulic drive system has been gradually the radar antenna lifting mechanism is used. This design uses a flip-hydraulic lifting mechanism and its hydraulic system, can be elevated to the larger antenna, and in the process of lifting of the antenna, the antenna of the same attitude, erecting the closing process is smooth, reliable, fastKeywords: hydraulic lift system; cars; radar;目录1 绪论 (1)1.1 课题研究背景 (1)1.2 雷达车的特点 (1)1.3 国内外机动雷达现状分析 (2)1.4 设计的目的及任务 (3)2 举升系统总体方案设计 (5)2.1天线升降装置对液压系统的要求 (5)2.2总体技术方案 (5)2.3系统主要技术参数的确定 (7)2.4举升机构液压系统及工作原理的设计 (9)2.5设计特点分析 (11)3 举升机构的液压系统设计计算 (12)3.1 主液压缸的设计 (12)3.1.1 液压缸缸体厚度计算 (13)3.2.2 液压缸长度确定 (13)3.2.3 缸体的材料 (14)3.3.4 活塞杆直径的设计 (14)3.3.5 活塞杆的材料 (15)3.2 副液压缸的设计 (17)3.2.1 液压缸缸体厚度计算 (17)3.3 活塞的设计 (18)3.3.1 活塞的材料 (18)3.4 导向套的设计与计算 (19)3.4.1 最小导向确定长度H的 (19)3.4.2 导向套的结构 (20)3.4.3 导向套的材料 (20)3.5 端盖和缸低的设计与计算` (20)3.5.1 缸盖的材料 (21)3.6 缸体的长度确定 (22)3.7 缓冲装置的设计 (22)3.8 密封件的选用 (22)3.9 动密封部位密封圈的选用 (23)3.10 液压缸的安装连接结构 (23)3.11 液压缸油口的设计 (24)4 液压泵的参数计算 (26)4.1 泵的工作环境 (26)4.2 主液压缸液压泵流量的确定 (27)4.3 副缸液压泵流量的确定 (27)4.4 主缸电动机功率的确定 (28)4.5 副缸电动机功率的确定 (28)4.7 油箱容积的确定 (29)4.8 油管的选择 (30)4.9 液压系统热性能验算 (30)5 液压系统的安装 (32)5.1 安装的基本要求: (32)5.1.1 系统安装前注意事项 (32)5.1.2 系统安装时的注意事项 (32)5.1.3 系统安装方法 (34)5.2液压系统的调试 (35)5.2.1 调试的目的 (35)5.2.2 调试的步骤 (35)5.2.3 调试的主要内容 (36)结论 (38)参考文献 (39)致谢 (40)毕业设计(论文)知识产权声明 ............................................. 错误!未定义书签。
车载倒车雷达装置的设计任务书
一、毕业设计(论文)的内容随着社会经济的发展,交通运输业日益兴旺,汽车的数量在大副攀升。
交通拥挤状况也日趋严重,撞车事件屡屡发生,造成了不可避免的人身伤亡和经济损失。
本课题要求利用单片机设计一种响应快,可靠性高且较为经济的车载倒车雷达系统。
二、毕业设计(论文)的要求与数据要求:1、了解车载倒车雷达系统的相关背景及意义;2、掌握超声波测距原理及单片机相关技术;3、在一定范围内能对障碍物进行实时测量并显示距离同时给出警报;4、完成相关硬件制作及软件调试。
三、毕业设计(论文)应完成的工作应完成的工作:1、完成二万字左右的毕业设计说明书(论文);在毕业设计说明书(论文)中必须包括详细的300-500个单词的英文摘要;2、独立完成与课题相关,不少于四万字符的英文资料翻译(附英文原文);3、参考文献要15篇上,且至少1篇为英文;4、完成相关硬件调试并模拟演示,图表资料齐全(兼附计算机制版软件绘出的相关硬件的原理图和制版图)。
四、应收集的资料及主要参考文献[1]任仲贵. CAD/CAM原理[M]. 北京:清华大学出版社,1991.9.[2]王明强. 计算机辅助设计技术[M]. 北京:科学出版社,2002.[3]张谦琳.超声波检测原理和方法[M]. 北京:中国科技大学出版社,1993.10.[4]吴宗泽. 机械设计实用手册[M]. 北京:机械工业出版社,2002.[5]胡萍.超声波测距仪的研制[J].计算机与现代化,2003,7(10):21~23.[6][Hong-Chao Zhang and Enhao Lin. A hybrid-graph approach for automated setupplanning in CAPP. Robotics and Computer Integrated Manufacturing [J], 1999, 15: 89 100.[7]Y. Zhang, W. Hu and Y. Rong et al. Graph-based set-up planning and tolerancedecomposition for computer-aided fixture design. International Journal of Production Research [J], 2001, 39(14): 3109 3126.五、试验、测试、试制加工所需主要仪器设备及条件计算机一台;单片机开发系统一套;示波器一台;万用表一只;相关电子元件一套任务下达时间:2015年12月28日毕业设计开始与完成时间:2015年12月28日至2016年05 月22日组织实施单位:教研室主任意见:签字:2015年12月30日院领导小组意见:签字:2015年12月31日。
基于车载雷达天窗与升降机构机电控制系统设计
基于车载雷达天窗与升降机构机电控制系统设计作者:刁世伦王鹏飞来源:《电子技术与软件工程》2015年第15期摘要车载平台天窗、升降特性的车体架构,常被布设于外厢车体、通讯车体衔接着的活动顶盖。
雷达衔接的厢式车,舱体顶盖应能顺畅移动;顶盖启闭架构,应能与现场特有的状态契合。
本文经过调研,设定了雷达舱特有的伺服控制,以便管控这样的顶盖。
顶盖灵活启闭,能适应环境,且便于平常修护。
这种设计路径,能保障高层级的技术水准,提升机动能力。
【关键词】车载雷达天窗升降机构机电控制系统设计方式雷达机电控制,整合了继电器、对应着的驱动器,建构控制模式。
这种惯用模式,平日之中的响应偏慢,且控制柜耗费掉的舱体空间偏多。
系统没能提升柔性,设计成型以后,很难再去变更。
车载雷达天窗、体系架构之中的升降机构,采纳了机电及自动控制。
新颖情形下的机电体系,省去了偏多耗费,保障体系稳定。
这类车载系统,应对了突发态势下的恶劣气候,带有临时变更的优势。
1 机电总体架构车载架构内的雷达天窗、车载升降系统,都包含新颖特性的机电控制。
控制体系硬件,是带有智能特性的伺服配件,这种电机被设定成主体的管控单元。
驱动控制配件衔接着操作盒、天窗交流电机、升降管控必备的配件、传感器单元等。
这种布设方式,建构了整体架构下的机电控制。
设计路径中,采纳惯用的C语言,拟定了细化流程。
在操作页面之中,设定驱动参数,以便管控整体体系。
2 新式硬件搭配系统硬件框架,包含小规格特有的电源模块、电机驱动配件。
这种伺服电机,带有高功率独有的优势,采纳标准软件来建构支撑。
它整合了更高层级的运动控制、功率放大装置、网络架构之中的新式通讯。
不用布设额外驱动,即可启闭天窗。
这种配件固有的质地优良,占据空间被缩减,提升响应速率。
采纳直接控制,提升了固有的灵活水准。
天窗运动控制、车载升降机构,带有互锁的倾向。
具体而言,天窗启动至拟定好的方位时,体系才可供电。
在这个时点,升降范畴的关联动作,并不受到限制。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
车载雷达传动装置设计基本参数与要求:♦雷达直径中3m,重约60KG。
♦雷达具有展开和收藏功能,展开或收藏时间小于1.5min。
♦雷达展开状态能实现正反方位搜索旋转,转速为6r/min,定位精度为0.5。
♦抗风能力:10级风能正常工作,12级风可生存。
♦车内允许空间为:(长X宽X高)800X700X500o♦车外工作温度:±40℃,贮藏温度:±60℃一绪论1.1引言雷达作为一种可以主动地、全天候探测远距离目标的探测器,是获取目标信息的重要装备,在国防建设和国民经济发展中起着重要作用,在近年来发生的几次大型局部战争中,雷达在以信息化为特点的高科技战争中的重要作用得到了充分显示。
固定式雷达线系统的覆盖空间是固定和有限的,只能对事先确定好的空域有效,不能灵活机动,而且需要进行基站建设,投资大。
而车载雷达系统可以移动,车载雷达天线系统可以随时开到需要的前沿上,而且由于机动性好可以迅速转移,战场生存率比固定站高得多,且不需要进行基站建设,具有机动灵活、投资小等优点,因而目前在军用、民用等领域应用得到了广泛应用。
1.2车载雷达简介1.2.1车载雷达的发展现状雷达技术首先应用于军用,随着全世界对道路交通安全、汽车安全技术的不断重视,雷达技术开始转为民用,主要用于交通的管制、雷达测速以及汽车主动安全技术方面。
国外对车载雷达的研究开始比较早,在以德国、美国、日本、法国等为代表的主要西方发达国家内展开。
随着汽车电子技术、嵌入式技术以及信号处理技术的发展,推动了车载雷达的研制与应用,世界各国掀起了研发车载雷达的热潮。
车载毫米波雷达的研究始于20世纪60年代。
典型代表是德国ADC公司生产的ASR100毫米波雷达采用脉冲测距方式。
戴姆勒奔驰、日产、福特等汽车公司广泛开发的汽车主动避撞系统以及自适应巡航系统多采用该款雷达。
日本丰田公司与Denso公司、三菱公司合作开发的电子扫描式毫米波雷达,采用调频连续波测距方式,结构紧凑、抗干扰性能好。
它是世界上第一款采用先进的相控阵技术的车载雷达。
与机械扫描雷达相比,相控阵雷达的天线无需转动,波束扫描更加灵活,对目标识别的性能优异。
止匕外,日本NEC、本田、村田制作所,德国VD0、宝马、博世(Bosch),美国德尔福、福特以及瑞典沃尔沃等公司都竞相研制和生产车用雷达。
目前,世界上采用车用雷达的汽车产品还不多,车用雷达仅局限于在一些高档豪华轿车上应用。
如,奔驰s系列、美洲虎XKR系列、尼桑的Q45\Fx45系列、凌志330和430系列、奥迪A8系列,以及卡迪拉克的某些选配车型。
1.2.2传动装置的研究现状车载雷达传动系统主要实现雷达的自动架撤和方位转动功能。
因而目前对于车载雷达传动系统的研究主要集中在自动架撤系统和方位转动系统两个方面。
雷达的自动架撤系统经过多年的发展,其组成形式已基本固定,一般由抗倾覆支臂、调平系统、天线折叠和锁紧机构、升降机构、执行驱动系统和相应的控制系统组成。
夏勇等对高机动雷达自动架撤系统的组成、功能及其一般设计要求进行了叙述,并重点介绍了仿生式支臂、调平撑腿等具体结构及伺服控制系统的电气设计。
对于雷达自动架撤系统的研究主要集中在自动架撤机构的具体实现及控制算法上。
抗倾覆支臂主要功能是支撑载车平台,提高雷达系统的抗风能力和稳定性。
按其结构形式基本分为仿生蛙腿式、剪刀式、门式三种。
其中,仿生蛙腿式由于其结构形式新颖、机构简单可靠、收缩后尺寸小等优点,因而成为目前应用最广的抗倾覆支臂形式之一。
调平系统主要是实现载车平台的水平精度要求,其结构件一般与载车平台直接连接或通过抗倾覆支臂连接到载车平台上,利用油虹或丝杆的轴向运动实现载车平台的精度要求。
其机构形式经过多年的发展,己基本趋于成熟,分为油赶型和电机(马达)驱动滚珠(或梯形)丝杆两种基本形式。
对于调平系统的研究主要集中在调平机构研究、调平算法或策略研究等方面。
天线折叠与锁紧机构主要实现大型天线阵面的自动拼装与锁紧,实现高机动性雷达天线阵面工作状态与运输状态之间的切换。
目前对于天线折叠与锁紧机构的研究主要集中在不同天线结构下机构的具体实现方式上及利用仿真技术手段对折叠和锁紧机构的载荷及可靠性进行分析等方面。
通常情况下,展收机构一般分为90度展收机构和180度展收机构;锁紧机构一般可以分为锁销式、凸轮机构式等。
升降机构目的是实现天线相位中心物理高度的提升,以减小近距离遮蔽。
典型的应用主要有直线升降和天线倒竖举升两种。
直线升降机构根据其结构形式一般分为桅柱式升降机构和剪叉式升降机构。
桅柱式升降机构雷达高架结构技术之一,与其它结构型式的升降塔相比,具有结构紧凑、动作时间少、架设高度高、易于实现大行程的优点,根据主要结构件截面形式的不同,可以分为圆形、矩形和多边形跪柱升降机构。
天线倒竖举升机构则主要利用油虹(或丝杆)、连杆机构的运动,驱动天线绕旋转轴的转动,从而达到达到提高天线相位中心的目的。
对于升降机构的研究重点主要集中在机构的运动原理设计、机构的力学性能仿真分析及具体的工程设计等几个方面。
方位转动系统主要由转台、方位回转轴承、方位驱动装置和底座组成,实现负载天线的稳态、匀速转动。
方位系统的设计主要是合理选择(设计)方位回转轴承和方位驱动装置,设计转台及底座,在满足结构尺寸和重量要求的前提下,提高系统动静态刚度,以确保轴系精度。
对方位转动系统的研究主要集中在转台和底座结构设计及优化、结构动静态性能的仿真分析方面。
1.2.3车载雷达的分类车载雷达可以分为以下几类:1)测速雷达。
可以测量车轮的转速来测量出汽车速度。
2)障碍物探测雷达。
这种雷达可在无能见度或能见度很差的情况下观察地形,向司机报警从而防止事故。
3)自适应巡航控制雷达。
传统的巡航控制能保持一个固定的速度,但不考虑车辆周围的环境,所以在车流量大的情况下,由于车辆要不时地开进和驶离行车道,传统的巡航控制就很不适应了。
自适应巡航控制,顾名思义,能够适应车辆周围的环境,并根据本车与前车的速度与前车保持一个安全速度4)防撞雷达。
此类雷达能根据车辆当前的方向和速度测量到在车辆前方路上可能引起碰撞的危险障碍物,因此它适用于大气能见度低的情况以及实际判断力不理想(车距太短、速度太高)的情况。
它的目的是警告驾驶员要打开气囊或其他制动设备,控制汽车的速度。
5)其他车辆监督和控制雷达。
很多其他车辆控制功能,比如车辆识别、定位、车队监督、车站调度、导航、选择行车路线,都可以在雷达的帮助下实现。
此类雷达可以放在车上,也可以放在地面上,车辆装载着雷达信标或反射器,并可编码进行车辆识别。
还可以设想具有特殊目的的其他机动车雷达,比如控制有轨车辆或游乐场里的游乐车的雷达。
二设计原理根据设计要求,该车载雷达传动装置设计主要包括车载雷达升降装置的技术设计、锁紧机构研究与设计、天线阵面倒竖机构研究与设计、方位转动机构设计、车载雷达电液自动调平系统设计等五个方面的设计。
车载雷达升降装置的技术设计是通过机电液压传动控制相关理论,设计了一种基于机电液一体化的升降装置。
升降机构目的是实现天线相位中心物理高度的提升,以减小近距离遮蔽。
调平系统主要是实现载车平台的水平精度要求,其结构件一般与载车平台直接连接或通过抗倾覆支臂连接到载车平台上,利用油虹或丝杆的轴向运动实现载车平台的精度要求。
方位转动系统主要由转台、方位回转轴承、方位驱动装置和底座组成,实现负载天线的稳态、匀速转动。
方位系统的设计主要是合理选择(设计)方位回转轴承和方位驱动装置,设计转台及底座,在满足结构尺寸和重量要求的前提下,提高系统动静态刚度,以确保轴系精度。
对方位转动系统的研究主要集中在转台和底座结构设计及优化、结构动静态性能的仿真分析方面。
三车载雷达电液自动调平系统设计3.1引言车载雷达在到达预定位置后,要求能快速架设精确的水平基准。
高水平度的稳定平台,对于雷达天线平稳运转、精确探测飞行目标位置以及提高目标图像清晰度有重要影响。
以往国内雷达天线座车主要采用手动调整螺杆或液压千斤顶,通过目测气泡水平仪,由多人反复操作调节各螺杆支腿达到水平,这种方法调节时间长、水平精度低,操作难度大,且需要多人配合操作。
近年来,车载雷达座车的调平采用了自动调平系统,其中主要有机电调平系统和电液调平系统,大大缩短了调平的时间,提高了调平的精度,只需要启动电源即可完成全部架设与调平。
3.2调平方案设计3.2.1调平系统设计调平系统主要由检测机构、执行机构和控制系统三部分组成,具体包括双轴水平传感器、阀控液压缸和可编程控制器PLC。
(1)检测装置为角度检测器,用来检测平台左右及前后的不平度。
其检测值的大小是系统判断是否进行调平的依据,其检测精度的高低直接决定了系统的最终调平精度。
(2)调平执行机构采用4个带有自锁功能的液压支腿,将其对称布置在雷达座车的两侧,由相应的电液伺服阀控制,通过支腿的上下伸缩,实现雷达座车的调平。
(3)控制系统是自动调平系统的核心组成部分,常见的有计算机控制和可编程控制两种形式。
由于载车上计算机不便放置而PLC 具有高可靠性和接口简易型,这里选用PLC 作控制器,通过软件编程控制调平机构动作,实现车载系统的自动调平。
自动调平系统控制原理如图3.1所示。
[jgj 酎唱出组卜叱?女^液压缸1 士 ・懵国瓜埔人模块,「水一传感端-图3.1电液自动调平系统方框图3.2.2水平度误差分析图3.2是4点式承载平台示意图,采用4个垂直液压缸来支撑平台。
图3.2平台支撑示意图水平传感器沿X 、Y 方向布置,X 、Y 两个方向的水平倾角为A 和B,两传感器 给定水平精度1ml 达座隼一间的夹角为C,则平台的倾斜角度H 可由A 和B 合成为:9Ja 2+p 2+2a x B x cos ysin y如果两个方向的控制精度为土6,则调平后平台的水平误差为:9=,笃6J +cosysiny从上式可以得出,控制精度6给定,当一90o 时,即两传感器垂直布置,平台 的水平误差9有最小值,此时:9=v'26。
也就是说,两边的水平控制精度应为整个。
例如:要求整个平台的倾斜度为2’,则控制时两个方 向的控制精度应该为%.''2’o3.2.3 调平方法调节一个平面到水平状态的调节过程可以有单向调节和多点调节两种方案。
若采用多点调节,即各点都同时运动,调整到一个预定点,其特点是速度快,但会出现相互干涉耦合现象且算法复杂。
这里采用单向调节的方案即先将X 轴方向调平,再将Y 轴方向调平。
虽然调节时间稍长但协调性好。
调平过程中调节的实际上是4点的相对高度,为了避免虚腿的产生,提高系统的调节精度,调节过程采用向最高点看齐的方法(通过水平传感器的检测信号可以找出平台的最高点),即保持相对最高点不动,把低点调高,这样平台就只有上升运动。