一阶积分器多智能体模型达到平均一致的必要条件
异质多智能体系统在固定拓扑下的分组一致性

异质多智能体系统在固定拓扑下的分组一致性闻国光;黄俊;于玉洁【摘要】研究了异质多智能体系统的分组一致性,针对固定通信拓扑情况,提出了一种基于邻接信息的分布式控制协议,并通过李雅普诺夫理论,推导出异质多智能体系统实现分组一致性的充分条件.最后利用数值仿真验证了理论分析的正确性.【期刊名称】《北京交通大学学报》【年(卷),期】2016(040)003【总页数】5页(P115-119)【关键词】异质多智能体系统;分组一致性;李雅普诺夫理论【作者】闻国光;黄俊;于玉洁【作者单位】北京交通大学理学院,北京100044;北京交通大学理学院,北京100044;北京交通大学理学院,北京100044【正文语种】中文【中图分类】O175近年来, 由于多智能体系统在生物系统、机器人编队、传感器网络、无人驾驶飞行器编队、水下行驶器和群体决策问题等方面的广泛应用,而越来越受到来自控制科学、数学、生物学、计算机科学等领域学者的关注.目前,在多智能体系统协调控制的研究中,一些研究课题已经取得了令人鼓舞的结果,例如:群集控制、蜂拥控制、一致性控制、聚集控制、区域覆盖、编队控制等.其中,多智能体系统的一致性控制问题可以描述为:通过对邻居智能体的局部信息设计分布式控制策略,使得智能体系统中某些重要的状态量随着时间的变化最终趋于一致.可以说一致性问题是多智能体系统协调控制一个重要的基本问题.2004年,Olfati-Saber和Murray[1]给出了研究连续时间一阶多智能体系统一致性控制问题的一个系统框架.在他们的模型中,每个智能体的动力学由一阶积分器来描述i(t)=ui(t),i=1,2,…,n,其中,xi和ui分别是智能体的位置和速度.2005年,Ren 等进一步研究了一阶连续和离散多智能体系统的一致性问题,证明了如果存在一系列有界的时间区间,使得在每个区间内智能体间的通信拓扑图包含有向生成树,那么一阶多智能体系统能够达到一致性.与此同时,Moreau等[2]考虑了一阶离散非线性多智能体系统的一致性控制问题,并得到了一系列实现一阶离散非线性多智能体系统一致性的条件.2007年,Lin等[3]对一阶连续非线性多智能体系统的一致性控制问题进行了研究.随着这个话题的发展,人们得到了大量新的关于带有不同模型和控制策略的一阶多智能体系统的结果.在现实中,考虑到许多系统的运动需要用位置和速度来共同刻画,二阶多智能体系统一致性控制被广泛研究.Ren等[4]以及Xie等[5]研究了二阶多智能体系统的一致性控制问题,并分别给出了一些具有固定通信拓扑和切换通信拓扑结构的多智能体系统实现一致性的条件.最近,在文献[6]中,作者研究了带有采样信息的二阶多智能体系统一致性问题.现有的关于多智能系统一致性的研究成果主要是基于同质多智能体系统建立的,即假设每个子系统具有相同的动力学.然而,在实际工程应用中,当不同种类的智能体分享共同目标时,由于外界影响或交流条件的限制,发生耦合的每个智能体的动力学系统可能不同.此时,采用异质动力学模型所模拟的带有不同特性和能力的多机器人网络在现实世界中具有更强的应用性.目前,异质多智能体系统一致性的研究文献,主要是考虑一阶系统和二阶系统的混合[7-8].文献[9]通过应用幂积分方法和李雅普诺夫理论,针对由一阶和二阶智能体组成的异质多智能体系统的一致性问题提出了两种有限时间一致性算法.在文献[10]中,Zheng等研究了由一阶和二阶智能体组成的混合系统的一致性问题.而以上有关异质多智能体系统的研究都是异一致性.随着研究的深入,我们发现分组一致性的适用范围更广,更具研究意义.对于由多个小组构成的复杂网络,分组一致性意味着每个组的智能体可以达到一致性,而不同组收敛到不同的值.事实上,分组一致性更加符合自然和人类社会,因为在一些现实的情况中,比如细菌克隆模式的构造、个人意见的簇状构造会根据环境、实际情况、协作任务甚至时间一直变化[11-12].在入度平衡的假设下,Yu等[13]利用线性矩阵不等式给出了在固定拓扑下保证一致性的充分条件.通过在分组协议中应用笛卡尔坐标,Xie等[14]对于时间连续的多智能体系统建立了实现分组一致性的充要条件.现有的关于多智能体系统的文献中,或者考虑异质多智能体系统一致性,或者考虑同质分组一致性.而关于异质多智能体系统分组一致性方面研究还较少.然而,研究具有异质多智能体系统的分组一致性控制具有现实意义和理论意义.因此,本文作者研究异质多智能体系统,针对固定通信拓扑的情况,提出了一种基于邻居信息的分组一致性控制协议,并通过稳定性理论等分析方法,推导出了系统实现分组一致性的充分条件,最后使用数值仿真验证了理论分析的正确性.该研究将会对异质多智能体系统分组一致性控制理论在多机器人合作控制、交通车辆控制、无人飞机编队,智能交通、现代医疗、勘探、营救、以及网络资源分配等实际问题的应用提供进一步的理论基础和技术支持.1.1 图论基础在一个多智能体网络中,假设每个多智能体是一个质点,由这些多智能体构成一个无向图,图中的每条边代表每个多智能体之间的信息交流.每个智能体根据从它的邻接智能体接受的信息来更新自身的状态.设G=(ε,V,A)是一个加权有向图,节点集合为V=(v1,v2,…,vn),边集合ε⊆V×V,边eij=(vi,vj)∈ε意味着节点vj能从节点vi接收信息.A表示加权有向图的邻接矩阵.在A=[aij]n×n中,aij是大于等于0的常数,若eji∈ε则aij>0;若eji∉ε则aij=0.若在图G对应的邻接矩阵A中,有aij=aji则称这个图G是无向图.在有向图G中,若任意两个不同的节点之间都有一条路,则称这个有向图G是强连通的.在无向图G中,连通也叫做强连通.在有向图G中,如果存在一个节点和其它所有节点之间至少有一条路,则称这个有向图G 有有向生成树.对于给定的多智能体系统,若用有向图G来模拟所有智能体之间的信息交流,那么称G为多智能体系统的通信拓扑.用Ni={vj|eji∈ε}来表示节点vi 的邻接点集合.此外,定义图G的拉普拉斯矩阵为L=[lij]n×n,,n.结点i的度定义为.1.2 系统模型考虑由m个二阶智能体和n-m个一阶智能体构成的异质多智能体系统.二阶智能体系统表示如下:其中xi(t)∈Rn,vi(t)∈Rn,ui(t)∈Rn分别表示第i个智能体位置,速度,控制输入.此外,一阶智能体的动力学系统表示如下其中xi(t)∈Rn,ui(t)∈Rn分别表示第i个智能体位置,控制输入.设在一个由k组(k≥2)构成的多智能体系统中,如果智能体属于第t个组,则记σi=t,令xσi是对智能体进行分组的常数,且当σi=σj时,有xσi=xσj,当σi≠σj 时,有xσi≠xσj.定义1 对于任意的初始状态值xi(0)和vi(0),若异质多智能体系统满足以下条件则称其逐渐达到k组一致性(k≥2).注1 为了方便起见,本文都是基于一维空间,即xi(t),vi(t),ui(t)∈R.然而,我们在一维空间里得到的所有结果都可以通过克罗内克积(Kronecker product)推广到n维空间.引理1[15] 考虑一个形式为的自治系统,f是连续的,令:Rn→R是一阶偏导连续的标量函数.假设1)当‖x‖→,2)∀令S是Rn中使=0的点的集合,M是S中最大的不变子集,则当t→时,Rn中所有解趋近于M.定义控制器如下:其中k1>0,k2>0是控制参数.在这部分中,我们将讨论异质多智能体系统在固定拓扑下的分组一致性.定理1 设智能体间的通信拓扑图是无向连通的,由式(1)和式(2)组成的异质多智能体系统在控制器(5)下可以达分组一致性.证明根据控制器(5),可以将式(1)~(2)改写成:令ei=xi-xσi,i=1,2…,n,则有根据和 ei=xi-xσi,系统(6)可以写作选择李雅普诺夫函数如下:其中V是一个正函数.对V求导,得因为通信拓扑图是无向的,即邻接矩阵A=[aij]n×n是对称的,我们可以得到将式(9)和式(10)代入式(8),得然后利用拉萨尔不变集原理.设,M是S中最大的不变子集.当=0时,有所以从式(7)和式(11)中可得M如下从式(12)中可得两式相加得基于之前提到的性质和式(15),最大不变子集M化为如下形式将ei=xi-xσi代入式(16),可以得到综上所述,定理1得证.在本节中,我们将通过仿真来验证其理论结果.考虑一个由3个具有二阶动力学的智能体(智能体1、2、3)和4个具有一阶动力学的智能体(智能体4、5、6、 7)构成的异质多智能体系统,它们的通信拓扑见图1.我们将智能体分为两组G1和G2,智能体1、2、4、5属于G1组,智能体3、6、7属于G2组.从图1可以看出通信拓扑是无向连通的.为了简化计算,我们假设邻接矩阵中的权重都为1.令k1=3,k2=1,记t为系统运行的时间,智能体的初始位置和速度是随机的,取系统初始速度为T,初始位移为xT(0)=[0,1.2,0.3,2,0.8,3.8,1.7]T,图2显示了所有智能体的状态轨迹,从图2的仿真结果中可以看出系统能够渐进收敛达到分组一致性,验证了定理的正确性.本文研究异质多智能体系统在固定无向通信拓扑下的分组一致性问题.文中提出一个基于邻居信息的分布式分组一致性的控制协议,并给出了使系统达到分组一致性的充分条件.最后用数值仿真验证了理论的正确性.未来,我们将进一步考虑在切换拓扑下,异质多智能体系统的分组一致性问题.【相关文献】[1] OLFATI-SABER R, MURRAY R M. Consensus problems in networks of agents with switching topology and time-delays[J]. IEEE Transactions on Automatic Control, 2004,49(9):1520-1533.[2] REN W, BEARD R W. Consensus seeking in multiagent systems under dynamically changing interaction topologies[J]. IEEE Transactions on Automatic Control, 2005,50(5):655-661.[3] LIN Z, FRANCIS B, MAGGIORE M. State agreement for continuous-time coupled nonlinear systems[J]. Siam Journal on Control & Optimization, 2007, 46(1):288-307.[4] REN W, ATKINS E. Distributed multi-vehicle coordinated control via local information exchange[J]. International Journal of Robust & Nonlinear Control, 2007, 17(10/11):1002-1033.[5] XIE G, WANG L. Consensus control for a class of networks of dynamic agents[J]. International Journal of Robust & Nonlinear Control, 2007, 17(10/11):941-959.[6] YU W, ZHOU L, YU X, et al. Consensus in multi-agent systems with second-order dynamics and sampled data[J]. IEEE Transactions on Industrial Informatics, 2013,9(4):2137-2146.[7] ZHENG Y, WANG L. Finite-time consensus of heterogeneous multi-agent systems with and without velocity measurements[J]. International Journal of Control, 2012, 61(7):906-914.[8] FENG Y, XU S, LEWIS F L, et al. Consensus of heterogeneous first- and second-order multi-agent systems with directed communication topologies[J]. International Journal of Robust & Nonlinear Control, 2013,25(3):362-375.[9] LIU C L, LIU F. Stationary consensus of heterogeneous multi-agent systems with bounded communication delays [J]. Automatica, 2011, 47(9):2130-2133.[10] ZHENG Y, ZHU Y, WANG L. Consensus of heterogeneous multi-agent systems[J]. IET Control Theory & Applications, 2011, 5(16):1881-1888.[11] YOU S K, KWON D H, PARK Y, et al. Collective behaviors of two-component swarms[J]. Journal of Theoretical Biology, 2009, 261(3):494-500.[12] BLONDEL V D, HENDRICKX J M, TSITSIKLIS J N. On Krause's multi-agent consensus model with state-dependent connectivity[J]. IEEE Transactions on Automatic Control, 2009,54(11):2586-2597.[13] YU J, WANG L. Group consensus of multi-agent systems with undirected communication graphs[C]// Asian Control Conference, Hong Kong, 2009:105-110. [14] XIE D, LIU Q, LYU L, et al. Necessary and sufficient condition for the group consensus of multi-agent systems[J]. Applied Mathematics & Computation, 2014, 243:870-878. [15] AEYELS D. Asymptotic stability of nonautonomous systems by Liapunov's direct method[J]. Systems & Control Letters, 1995, 25(4):273-280.。
多智能体一致性基础
1.引言:
近几年来,随着计算机技术、网络技术和通信技术的飞 速发展,人们对于基于网络的多智能体系统的交互和协调控 制的研究越来越多。特别是,多智能体系统在无人驾驶飞行 器的编队控制、分布式传感器网络、卫星的姿态控制、分布 式计算以及通讯网络的拥塞控制等各个领域的广泛应用,推 动着多智能体系统建模与分析的研究逐步深入。 而在对多智能体系统的深入研究中,一致性问题也得到 了迅速的发展。从最初的Reynolds提出的模仿动物集结的计 算机模型到后来的Olfati-Saber和Murry系统提出和解决了多 智能体网络系统的一致性协议的理想框架,一致性问题已经 得到了丰硕的成果。
i i
jN i
由于 x
j
xi j i ,对所有 i, j
成立,定义下面的李氏函数: 2 V ( ) (16)
于是,可以得到:
V ( ) 2i 1 jN iij ( j i ) ( i , j )E iij ( j i ) j ji ( i j ) ( i , j ) ( j i )ij ( j i ) 0
i
3.2.有时滞的线性一致性协议: 定理2:假定一连通图的每个节点 xi 都能够在固定的通讯时 延 0 后接收到其邻居节点 x j 的信息,并且满足下面的线性 协议: ui (t ) ( x j (t ) xi (t )) (10) jN 于是,所有节点的状态值是下面时滞微分方程的解: x Lx (t ), x(0) R n (11) 另外,图的所有节点都全局渐进地达到平均一致性,当且仅 当下面两个等价条件中任意一个满足的时候:
4.动态图与非线性协议
机器人、太空飞行器的姿态调整是一致性问题的特殊案 例,对于这些物理系统,假定它们的姿态可以无限地变化是 不可能的,也就是说它们的输入扭矩是有界的。这就要求一 致性协议的发展来保证所以节点的输入仍保持有界,这自然 地导致了非线性一致性协议的设计与分析。首先介绍一下通 常用来分析非线性一致性协议的工具—动态图的概念: 令G {V, E}表示一个图,其中 V {v1 , , vn } 表示n个节点的集合, 它的边集合为E。而一个动态图则表示为 G {V, E, },这是图 中的元素 ij : R R是与图的 G与边作用函数 相结合的图。 边 eij (vi , v j ) E 相关联的。现假定 ( x) 满足下面的特性:
人工智能习题库与答案

人工智能习题库与答案一、单选题(共103题,每题1分,共103分)1.()问题更接近人类高级认知智能,有很多重要的开放问题。
A、计算机视觉B、自然语言处理C、语音识别D、知识图谱正确答案:B2.逻辑回归模型中的激活函数Sigmoid函数值范围是A、(0,1)B、[0,1]C、(-∞~∞)D、[-1,1]正确答案:A3.使用什么命令检测基本网络连接?A、routeB、pingC、netstatD、ifconfig正确答案:B4.关于bagging下列说法错误的是:()A、为了让基分类器之间互相独立,需要将训练集分为若干子集。
B、当训练样本数量较少时,子集之间可能有重叠。
C、最著名的算法之一是基于决策树基分类器的随机森林。
D、各基分类器之间有较强依赖,不可以进行并行训练。
正确答案:D5.下列快捷键中能够中断(Interrupt Execution)Python程序运行的是A、F6B、Ctrl+QC、Ctrl+CD、Ctrl+F6正确答案:C6.下列关于深度学习说法错误的是A、LSTM在一定程度上解决了传统RNN梯度消失或梯度爆炸的问题B、CNN相比于全连接的优势之一是模型复杂度低,缓解过拟合C、只要参数设置合理,深度学习的效果至少应优于随机算法D、随机梯度下降法可以缓解网络训练过程中陷入鞍点的问题正确答案:C7.传统GBDT以()作为基分类器A、线性分类器B、CARTC、gblinearD、svm正确答案:B8.半监督支持向量机简称?A、S2VMB、SSVMC、S3VMD、SVMP正确答案:C9.以下不属于人工智能软件的是()。
A、语音汉字输入软件B、百度翻译C、在网上与网友下棋D、使用OCR汉字识别软件正确答案:C10.云计算通过共享()的方法将巨大的系统池连接在一起。
A、CPUB、软件C、基础资源D、处理能力正确答案:C11.下列哪项是自然语言处理的Python开发包?A、openCVB、jiebaC、sklearnD、XGBoost正确答案:B12.神经网络中最基本的成分是()模型。
多智能体系统通信拓扑最优设计

细研 究. 本文针对 系一 阶积 分 系统 的状 态 .引入 了多 智能体 系 统 的 能量 函数 ,据 此研 究 了在 一阶 积分 器控 制 下,多 智 能体 系 统一 致性 或群 集 性所 需要 设计 的最优 通 讯 拓 扑结构.
人工智能基础(习题卷64)

人工智能基础(习题卷64)第1部分:单项选择题,共50题,每题只有一个正确答案,多选或少选均不得分。
1.[单选题]DBSCAN算法将“簇”定义为:由()导出的最大的密度相连样本集合。
A)密度直达关系B)密度可达关系C)密度相连关系答案:B解析:DBSCAN算法将“簇”定义为:由密度可达关系导出的最大的密度相连样本集合。
2.[单选题]Spark Job默认的调度模式是()。
A)FIFOB)FAIRC)无D)运行时指定答案:A解析:默认情况下Spark的调度模式是FIFO (先进先出)。
3.[单选题]语音分析就是根据音位规则,从语言流中区分出一个个独立的()A)音素B)音词C)音句D)音节答案:A解析:4.[单选题]半导体应变片的工作原理是基于( )。
A)压阻效应B)热电效应C)压电效应D)压磁效应答案:A解析:5.[单选题]( )是指自己能够找出问题、思考问题、解决问题的人工智能。
A)弱人工智能B)超级人工智能C)强人工智能D)模式识别答案:C解析:6.[单选题]下列不属于数据科学跨平台基础设施和分析工具的是( )。
A)微软Azure答案:D解析:Ad。
be ph。
t。
sh。
p软件一般不作为数据分析工具。
7.[单选题]专家系统的推理机的最基本的方式是( )。
A)直接推理和间接推理B)正向推理和反向推理C)逻辑推理和非逻辑推理D)准确推理和模糊推理答案:B解析:8.[单选题]Python不支持的数据类型有()A)charB)intC)floatD)dict答案:A解析:Python中没有char9.[单选题]在数据加工过程中,将特征值按比例缩小,使之落入一个特定的区间的方法是()A)标准化B)平滑处理C)特征构造D)聚集答案:A解析:10.[单选题]以下关于文件的描述错误的选项是:A)readlines() 函数读入文件内容后返回一个列表,元素划分依据是文本文件中的换行符B)read() 一次性读入文本文件的全部内容后,返回一个字符串C)readline() 函数读入文本文件的一行,返回一个字符串D)二进制文件和文本文件都是可以用文本编辑器编辑的文件答案:D解析:11.[单选题]( )是由能源和生态两个基本术语结合而成的综合术语。
多智能体
分布式计算是一门计算机科学,一种计算方法,和集中式计算是相对的。
它研究如何把一个需要非常巨大的计算能力才能解决的问题分成许多小的部分,然后把这些部分分配给许多计算机进行处理,最后把这些计算结果综合起来得到最终的结果。
这样可以节约整体计算时间,大大提高计算效率。
分布式人工智能(Distributed Artificial Intelligence),简称DAI,它是人工智能和分布式计算相结合的产物。
DAI的提出,适应了设计并建立大型复杂智能系统以及计算机支持协同工作(CSCW)的需要。
目前,DAI的研究大约可划分为两个基本范畴:一是分布式问题求解(Distributed Problem Solving,DPS);另一个是关于多智能体系统(Multi Agent System,MAS)实现技术的研究。
分布式问题求解:往往针对待解决的总问题,将其分解为若干子任务,并为每个子任务设计一个问题求解的子系统。
这里,首先需要智能地确定一个分配策略:如何把总工作任务在一群模块(Module)或者节点(Node)之间进行子任务分配;其次需要智能地确定一个工作任务协同的策略:要在基于分散、松耦合知识源的基础上,实现对问题的合作求解。
这里所谓“分散”的概念是指任务的控制操作和可利用的信息都是分布的,没有全局控制和全局数据;知识源分布在不同的处理节点上,数据、信息、知识和问题的答案可以按照某种规则予以共享。
(松耦合系统通常是基于消息的系统,此时客户端和远程服务并不知道对方是如何实现的。
客户端和服务之间的通讯由消息的架构支配。
只要消息符合协商的架构,则客户端或服务的实现就可以根据需要进行更改,而不必担心会破坏对方。
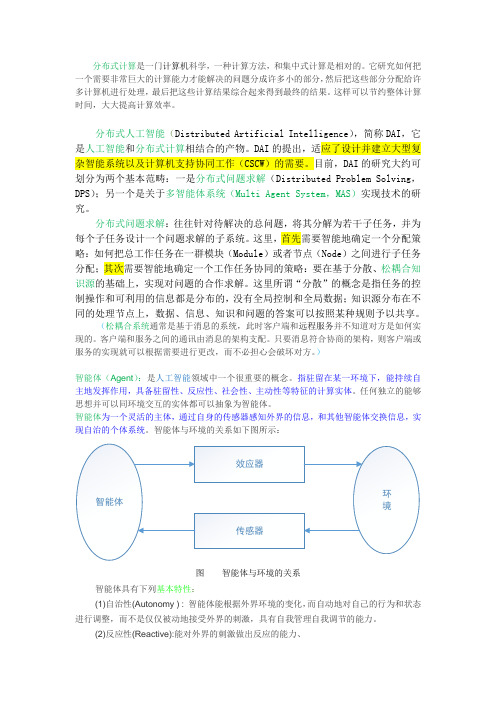
)(3)主动性(Proactive):对于外界环境的改变,智能体能主动采取活动的能力。
(4)社会性(Social ) : 智能体具有与其它智能体或人进行合作的能力,不同的智能体可根据各自的意图与其它智能体进行交互,以达到解决问题的目的。
多智能体系统协调控制一致性问题研究

多智能体系统协调控制一致性问题研究摘要:本文首先给出了多智能体系统协调控制一致性问题的发展情况,介绍了解决一致性问题的主要原理和适用范围,对一致性协议进行了总结,对一致性问题研究的主要领域进行了简单的概括。
文章最后对多智能体系统未来的发展方向进行了探讨和分析,提出几个具有理论和实践意义的研究方向。
关键词:分布式人工智能;多智能体系统;协调控制;一致性问题1. 引言多智能体系统在20世纪80年代后期成为分布式人工智能研究中的主要研究对象。
研究多智能体系统的主要目的就是期望功能相对简单的智能体之间进行分布式合作协调控制,最终完成复杂任务。
多智能体系统由于其健壮、可靠、高效、可扩展等特性,在计算机网络、机器人、电力系统、交通控制、社会仿真、虚拟现实、军事等方面有着广泛应用[1-3]。
智能体的分布式协调合作能力是多智能体系统的基础,是发挥多智能体系统优势的关键,也是整个系统智能性的体现。
在多智能体分布式协调合作控制问题中,一致性问题作为智能体之间合作协调控制的基础,主要是研究如何基于多智能体系统中个体之间有限的信息交换,来设计的算法,使得所有的智能体的状态达到某同一状态的问题。
一致性协议问题作为智能体之间相互作用、传递信息的规则,它描述了每个智能体和与其相邻的智能体的信息交换过程。
近年来,一致性问题的研究发展迅速,包括生物科学、物理科学、系统与控制科学、计算机科学等各个领域都对一致性问题从不同层面进行了深入分析,一致性问题作为智能体之间合作协调的基础,受到越来越多研究者的关注,成为系统与控制领域的一个重要研究课题。
2. 多智能体系统协调控制中一致性问题阐述2.1图论基础知识图论和矩阵论是一致性问题研究分析中非常重要的工具,很自然的会想到用图论相关知识来表示多智能体相互间传递信息的过程。
如果用G = (V ,E)来表示一个图,其中V表示非空顶点的集合,E V2表示节点对组成的边的集合。
假设集合V中共有n个节点,切编号为i・口2,..., n?。
第1章多智能体机器人系统

1.2 多智能体机器人系统的控制(一致性研究)
• 非线性系统的一致性比线性系统的一致性要复杂得多,困难之处在 于非线性使得智能体之间交换信息时增加了一定的限制。
• 二阶 Lipschitz 非线性多智能体系统的一致性控制得到了一定的研究。 具有非线性动力学的高阶多智能体系统的一致性问题也得到了研究。
第1 章 多智能体机器人系统
1
1.1 多智能体机器人系统简介
• 多智能体系统在自然科学、社会科学等众多领域都有应用,并已成 为当前学术界一个重要的研究热点与富有挑战性的研究课题。近年来, 针对多智能体系统相关问题的研究得到了快速的发展,并不断涌现了大 量的研究成果。将多智能体系统的研究成果应用到机器人领域就是多智 能体机器人系统。
24
1.2 多智能体机器人系统的控制(一致性研究)
• 许多关于一致性问题的早期结果都是基于简单的智能体动力学,如 一阶或二阶积分器动力学。
• 然而,在现实中大量的实际物理系统不能简单地反映为一阶或二阶 动力学模型。例如,对于多无人机系统,可能需要高阶动力学模型。
• 因此,描述高阶线性多智能体的更复杂动力学模型吸引了大量学者 的关注。之后,将研究结果推广到了非线性多智能体系统。
Vehicle,AUV) 、卫星和智能电网等,它们是具有一定协调能力的控
制对象。
17
1.1.3 多智能体系统的应用领域
北京理工大学方浩教授团队设计的无人车集平台,还原了牧羊场景。
18
1.1.3 多智能体系统的应用领域
中国电科电子科学研究院研发的无人机“蜂群”。
19
1.1.3 多智能体系统的应用领域
• 移动类智能体,由于其具有自适应性、分散性和自组织性等特点, 在实际生产中有着极其重要的应用。因此开展针对移动类多智能体系统 的研究,提高其在工程实践中的应用,具有极高的实用价值和工程意义
人工智能原理知到章节答案智慧树2023年广东工业大学
人工智能原理知到章节测试答案智慧树2023年最新广东工业大学绪论单元测试1.人类对人工智能的研究远在2、3000年前就已经开始萌芽参考答案:对2.视频提到的几个影响人工智能发展的数学工具,包括()参考答案:三段论逻辑思维;二进制编码;笛卡尔坐标系;微积分3.达特茅斯会议在()年举办参考答案:19564.不属于人工智能研究流派的是()参考答案:无差别理论5.根据阿兰图灵提出的中文房间悖论的理论,人类的研究根本无法逼近强人工智能。
参考答案:对第一章测试1.“信息”与“关联”是构成知识的要素参考答案:对2.在选取知识的表示的具体技术的时候,哪个方面不需要考虑()参考答案:把所有情况都考虑进去并能够够正确表示的永真性3.任何知识都是在一定的条件和环境下产生的,所以也只有在这种条件和环境下才是正确的,换了另一个环境,也许就是错误的。
参考答案:对4.命题是一个非真即假的陈述句参考答案:对5.有许多事物都具有模糊的特点,如年轻人、老年人,这些都是没有量化的模糊概念。
这里描述的是知识的()性质参考答案:不确定性6.以下属于命题逻辑的连接词的有()参考答案:否定;合取7.命题逻辑是一种非常强大的表示法,可以描述事物的结构及逻辑特性,也可以刻画不同事物间的共同特征。
参考答案:错8.与数学公式类似,谓词公式也可以体现他们之间的等价性。
下面哪个谓词公式的等价性与否定连词有关。
()参考答案:得摩根律9.在谓词逻辑知识表示法中,如果谓词的个体本身不是谓词,那么称它为一阶谓词参考答案:对10.谓词的个体可以是()参考答案:谓词;常量;函数;变元第二章测试1.从推出结论的途径来划分,推理可分为三种推理方式,以下哪种不属于。
参考答案:单调推理2.通过运用已掌握的知识,找出其中蕴涵的事实,或归纳出新的事实的过程称为推理。
参考答案:对3.不完全归纳推理跟完全归纳推理类似,都是从足够多的事例中归纳出一般性结论参考答案:对4.设计鸟笼时候需要同时设计盖子,因为大家都认为鸟是会飞的。
人工智能模拟考试题与参考答案
人工智能模拟考试题与参考答案一、单选题(共103题,每题1分,共103分)1.DBSCAN在最坏情况下的时间复杂度是()。
A、O(m)B、O(m2)C、O(log m)D、O(m*log m)正确答案:B2.中心极限定理告诉我们,当样本量足够大时,样本均值的分布围绕总体均值呈现()。
A、泊松分布B、伯努利分布C、正态分布D、几何分布正确答案:C3.()就是指分类任务中不同类别的训练样例数目差别很大的情况A、类别不对等B、类别不相同C、类别不平衡D、类别数不同正确答案:C4.一般情况,K-NN最近邻方法在()的情况下效果较好.A、样本较少但典型性好B、样本呈团状分布C、样本呈链状分布D、样本较多但典型性不好正确答案:A5.关于Boosting,Bagging和随机森林,以下说法错误的是A、从偏差-方差分解的角度看,Boosting主要关注降低偏差B、从偏差-方差分解的角度看,Bagging主要关注降低方差C、随机森林简单、容易实现、计算开销小D、Boosting不能基于泛化性能相当弱的学习器构建出很强的集成正确答案:D6.以下属于回归算法的评价指标是?A、召回率B、混淆矩阵C、均方误差D、准确率正确答案:C7.()问题更接近人类高级认知智能,有很多重要的开放问题。
A、计算机视觉B、知识图谱C、自然语言处理D、语音识别正确答案:C8.构建一个神经网络,将前一层的输出和它自身作为输入。
下列哪一种架构有反馈连接?A、卷积神经网络B、都不是C、限制玻尔兹曼机D、循环神经网络正确答案:D9.在主观Bayes方法中,证据E支持结论H时,有()。
A、LS=0B、LSC、LS=1D、LS>1正确答案:D10.设f′(x0)=0,则曲线y=f(x)在点(x0,f(x0))处的切线( )A、x轴垂直B、不存在C、与x轴平行或重合D、与x轴相交但不垂直正确答案:C11.半监督学习不包括A、直推学习B、纯半监督学习C、图半监督学习D、主动学习正确答案:D12.智能机器人可以根据()得到信息。
多智能体编队问题的研究
引言:多智能体的协同在很多工程中具有广泛应用背景,如区域搜索、战场环境侦察、多战机协同作战、舰队协同作战、导弹突防、目标多点跟踪等[1]。
在执行不同的任务时,需要依据不同的场景实现不同的编队形态,既能够实现既定任务,又能够保证协同作战时的灵活性。
因此,对于多智能体的编队问题研究对于多智能体协同执行任务是有较大的意义的。
多智能体编队问题包括固定编队控制和时变编队控制,其中固定编队控制是时变编队控制的特例。
由于在实际问题中多智能体编队往往需要针对不同的任务场景采用不同的编队形式,如导弹突防时多智能体需要采用间距较小的编队形式,而在巡航阶段需要采用间距较大的编队形式,所以可以看出多智能体的时变编队研究具有更高的实用意义。
基于上述的多智能体时变编队的优点,本文重点研究多智能体时变编队的控制问题。
一、多智能体编队控制的现状和当前存在的问题针对多智能体编队的研究,目前对于固定编队的研究方法较为成熟,且研究成果较多。
比较常见的一种方法是基于人工势场方法的编队保持策略,即系统建立多智能体之间的人工势场,通过感知势场梯度的变化来给单个智能体的控制器一个控制量,进而给出单个智能体的运动方向和运动速度。
该方法要求多智能体系统之间具有通信能力,至少应该保证系统的通信拓扑能够生成一个以图论语言描述的有向生成树。
简单来说就是任何一个智能体的状态信息发生变化时都可以通过通信网络将信息传递至整个多智能体网络。
该方法被广泛的应用于“领导-跟随者”、“虚拟领航者”以及多智能体编队问题的研究【摘要】 无人机或无人车等装备是军工领域中常见的现代作战装备之一。
然而在很多作战环境下单一的无人作战装备难以完成复杂的军事任务,因此提出了多智能体协同作战的理念。
多智能体在执行任务时往往需要实现不同的预设编队,进而实现避障、减小雷达反射截面积等任务,因此多智能体编队控制问题便成为需要解决的核心问题。
多智能体编队控制问题有固定编队及时变编队等问题,时变编队显然更具有实际的工程意义。
分布式网络的平均一致估计及优化

分布式网络的平均一致估计及优化重庆大学博士学位论文学生姓名:***指导教师:廖晓峰教授专业:计算机科学与技术学科门类:工学重庆大学计算机学院二O一四年三月Average Consensus Estimation and Optimization of the Distributed NetworksA Thesis Submitted to Chongqing Universityin Partial Fulfillment of the Requirement for theDoctor‘s Degree of EngineeringByWang HuiweiSupervised by Prof. Liao XiaofengSpecialty: Computer Science and TechnologyCollege of Computer Science ofChongqing University, Chongqing, ChinaMarch 2014中文摘要摘要分布式平均算法已经受到极大的关注,由于在分布式网络系统中节点保持简单的状态信息并且只与一跳邻居交换信息. 因此,不需要建立或保持复杂的路由结构. 而且,网络不会存在由计算可能被对手损坏、丢失或者干扰引起的瓶颈链接(树状或环状结构). 最重要的是,平均一致性算法最优异的性质在于算法最终计算的值均可以应用于整个网络,使网络用户询问任何节点都能立即得到一个响应,而不是询问或者等待融合中心的反应. 此外,最终计算的值就是网络节点初始测量的平均值,由于其在无线传感器网络中的广泛应用而受到关注. 本论文主要致力于分析分布式通信网络的平均一致估计和优化问题,其主要内容和创新之处可概述如下:①基于广播的随机多Gossip对算法的平均一致估计问题基于无线传感器网络、点对点网络和ad hoc网络的应用和普及,我们提出了一个基于广播的随机多Gossip对算法,算法适用于任意形式连通的网络进行信息交换和计算. 不像传统的随机Gossip算法,本章提出的算法是基于push-sum机制的,使得算法在任意时钟周期内都能保存和以及权值,并且允许随机扩散矩阵不是双随机的. 基于弱遍历理论和信息传播理论,推导出权值存在下界,并给出了下界的一个估计值. 通过引入一个误差势函数,推导出算法以概率1收敛到节点初始状态的平均. 此外,本章也提供了扩散速度、ò-收敛时间以及广播传输次数的上界. 最后,通过一个仿真的例子,示例了本章的算法与它相似算法相比较所表现出的优势.②基于预测机制多智能体网络加速平均一致问题探讨了多智能体网络达到分布式加权平均一致的双积分器的一致加速问题. 首先,给出了有向和无向网络收敛到加权平均一致的充要条件,但是收敛速度很慢. 为了提升收敛速度,提出一个预测方法加速达到一致,即利用线性预测器通过当前时刻和过去时刻节点的状态来预测将来节点的状态. 因此,基于预测机制的一致性协议就变成了原始一致性协议和线性预测器的凸加权和的形式,由于忽略冗余状态,这使得达到加权平均一致的收敛速度变快. 而且,对于无向网络,还给出了混合参数的可行域以及最优值. 值得指出的是,加速框架已经尽可能地挖掘存储在内存中的当前时刻和过去时刻节点的状态的最大潜能,用以提升收敛速度而不增加存储和计算负担. 最后,给出一个仿真实验证明方法的有效性.③单积分器的多智能体网络的加权平均预测问题讨论了在多智能体网络达到加权平均一致的前提下,如何同时提升网络的鲁I重庆大学博士学位论文棒性以及收敛速度. 为了达到这个目的,提出了一个加权平均预测方法,那么网络一致性协议就变为一个时滞的中立型协议. 通过运用Hopf分岔分析技术,获得了一个使网络能达到加权平均一致所允许的最大通信时滞. 而且,通过理论分析并与原一致性协议相比,所得到的结果不仅增强了网络对于通信时滞的鲁棒性而且提升了网络协议的收敛速度. 最后,给出两个仿真实验证明方法的有效性.④基于时滞次梯度信息的分布式协同优化讨论了带有通信时滞的可计算的多智能体网络的分布式协同优化问题,其中,每个智能体有自己的凸代价函数,并且协同最小化整个网络的全局代价函数. 为了解决这个问题,提出了一个基于对偶平均更新和时滞次梯度信息的算法,通过利用Brgman距离函数分析了衰减步长情况下算法的收敛性质. 而且,本章提供了收敛速率的一个紧致上界,它是网络规模和拓扑(表现为逆谱距)的一个函数. 最后,给出了一个仿真实验证明了本章的算法与其它相似算法相比表现出的优势.关键词:平均一致,收敛速度,分布式优化,多智能体网络,状态预测,II英文摘要ABSTRACTDistributed averaging algorithms have extremely attracted interest for applications in networked systems because nodes maintain simple state information and exchange information with only their one-hop neighbors. Therefore, it is not necessary to establish or maintain complicated routing structures. On the other hand, there are no bottleneck links, such as tree or ring structure, caused by that network computations may be compromised, lost, or jammed by an adversary. And over all, average consensus algorithms have the attractive property that the eventually computed value is avaible throughtout the network, enabling a network user to query any node and immediately receive the result, rather than querying from a fusion center and waiting for the response. Furthermore, the eventually computed value is exactly the average of the initial node measurements that has received much attention due to the wide applications in wireless sensor networks (WSNs). This dissertation focuses on average consensus estimation and optimization for the distributed communication networks. The main contributions and originality contained in this dissertation are as follows:①Average consensus in sensor networks via broadcast multi-gossipMotivated by applications to wireless sensor, peer-to-peer, and ad hoc networks, a distributed algorithm called broadcast-based multi-gossiping algorithm (BMGA) is proposed, which is designed for exchanging information and computing in an arbitrarily connected network of nodes. Unlike the traditional randomized gossip algorithms, push-sum mechanism based BMGA preserves the sums and weights, and admits stochastic diffusion matrices which need not be doubly stochastic. Based on the theory of weak ergodicity and message spreading, a lower bound on the weight is derived and an approximate value for this bound is worked out. By defining a potential function, BMGA converges almost surely to the average of initial node measurements with probability one. Specifically, the upper bounds on the diffusion speed, ò-convergence time and the number of radio transmissions are provided. Finally, a numerical example is presented to assess and compare the communication cost of several gossip-based algorithms to achieve a given performance for consensus.② Accelerated average consensus in multi-agent networks via state predictionThis section considers the double-integrator consensus speeding up problem for multi-agent networks (MANs) asymptotically achieving distributed weighted average.III重庆大学博士学位论文First, basic theoretical analysis is carried out and several necessary and sufficient conditions are derived to ensure convergence to weighted average for both directed and undirected networks, but the convergence is generally slow. In order to improve the rate of convergence, an approach is proposed to accelerate consensus by utilizing a linear predictor to predict future node state on the basis of the current and outdated node state. The local iterative algorithm then becomes a convex weighted sum of the original consensus update iteration and the prediction, which allows for a significant increase in the rate of convergence towards weighted average consensus because redundant sates are bypassed. Additionally, the feasible region of mixing parameters and optimal mixing parameters are determined for undirected networks. It is worth pointing out that the accelerated framework has tapped the maximum potential to the utmost, from both the current and outdated state stored in the memory, to improve the rate of convergence without increasing the computational and memorial burden. Finally, a simulation example is provided to demonstrate the effectiveness of our theoretical results.③Weighted average prediction for multi-agent networks with single integrator dynamicsThis section studies how to improve the robustness and the convergence speed for achieving the desired weighted average consensus for multi-agent networks. To do this, an improved weighted average prediction is introduced and the network model then becomes a delayed network model with neutral-type. By the similar technique analyzing the Hopf bifurcation, an upper bound of communication delay is derived for multi-agent networks to achieve average consensus. Additionally, the given results show that the improved weighted average prediction can not only improve the robustness against communication delay but also the convergence speed compared with the original system. Finally, two simulation examples are provided to demonstrate the effectiveness of our theoretical results.④Cooperative distributed optimization in multi-agent networks with delayed subgradientsThis section considers a distributed cooperative optimization problem over a computational multi-agent network with delay, where each agent has local access to its convex cost function, and jointly minimizes the cost function over the whole network. To solve this problem, an algorithm whcih is based on dual averaging updates and delayed subgradient information is developed, and furthermore, we also analyze its convergence properties for a diminishing step-size by utilizing Bregman-distanceIV英文摘要functions. Moreover, the sharp bounds on convergence rates are provided as a function of the network size and topology embodied in the inverse spectral gap. Finally, a numerical example is presented to assess and compare the performance benefits with several similar algorithms.Keywords: Average consensus, convergence speed, distributed optimization, multi-agent networks, state prediction,V重庆大学博士学位论文VI目录中文摘要 (I)英文摘要 (III)1 绪论 (1)1.1 分布式多智能体网络 (1)1.2 分布式一致性 (2)1.3 分布式协同估计及优化 (5)1.4 本论文的主要研究内容 (8)1.5 代数图论基本知识 (9)1.6 本论文的相关符号说明 (9)2 基于Gossip算法的无线网络的分布式平均一致 (11)2.1 引言 (11)2.2 相关文献描述 (12)2.3 问题描述 (13)2.4 基于广播的随机多Gossip对算法 (14)2.5 基于广播的多Gossip对算法的收敛证明 (17)2.6 基于广播的多Gossip对算法的性能分析 (24)2.7 数值仿真 (27)2.8 本章小结 (29)3 基于预测机制的离散时间分布式网络的加速收敛 (31)3.1 引言 (31)3.2 问题描述 (32)3.3 有向网络的收敛性分析 (33)3.4 无向网络的收敛性分析 (35)3.5 加速预测机制简介 (36)3.6 基于加速预测机制的一致性分析 (38)3.7 数值模拟 (43)3.8 本章小结 (45)4基于预测机制的连续时间分布式网络的加速收敛 (47)4.1 引言 (47)4.2 问题描述 (48)4.3 一致性协议的收敛性分析 (51)4.4 预测协议对于通信时滞的鲁棒性分析 (54)4.5 预测协议的收敛速率性能分析 (56)4.5.1 通信时滞接近0 (58) (59)4.5.2 通信时滞接近max4.6 基于预测机制的一致性协议的性能分析 (61)4.7 数值模拟 (62)4.8 本章小结 (65)5 分布式网络的协同优化 (67)5.1 引言 (67)5.2 问题描述 (68)5.3 主要结果 (69)5.4 相关文献比较 (71)5.5 收敛性分析 (72)5.6 数值模拟 (77)5.7 本章小结 (79)6 总结和展望 (81)致谢 (83)参考文献 (85)附录 (97)A 作者在攻读博士学位期间发表及完成的论文目录 (97)B 攻读博士学位期间参加的科研项目目录 (97)C 参加的学术会议 (97)1 绪论随着计算机技术和Internet的普及、以及人工智能技术的发展,集中式控制已经不能完全适应科学技术和生产发展的需要. 分布式信息处理技术应运而生,采用该技术系统具有资源消耗小、运行速度快、容错性和可靠性高等优点. 事实上,对于大规模网络化系统的控制,分布式控制比传统的集中式控制更为方便、有效,这也使得利用分布式控制策略来协同完成一个全局目标的研究得到了迅速发展. 近年来,多智能体网络(Multi-Agent Networks)作为分布式信息处理的一个载体,已经吸引了计算机科学、通信工程、生物智能、自动控制等诸多领域学者的浓厚兴趣. 这主要是因为多智能体网络研究的重大进展为复杂性研究特别是复杂系统提供了数学建模及分析方法,同时又具有广泛的工程背景和应用前景.1.1 分布式多智能体网络多智能体网络研究历史可以追溯于上世纪80年代,推广应用于90年代中期,爆炸式发展于本世纪前10年[1]. 由于多智能体网络在不同学科被赋予的含义不同,使得多智能体网络至今都没有严格的、统一的定义. 一般来说,多智能体网络由多个整合了传感、通信和计算元件的简单智能个体(Agent)和一些交互作用规则组成,主要是邻域规则及拓扑结构组成,通过智能体之间的通信相互协调来共同完成系统目标. 多智能体网络技术是人工智能技术发展史一次里程碑式的飞跃,首先,通过智能体之间的交互通信,可以开发新的规则,用以处理不完全、不确定的知识;其次,通过智能体之间的协同合作,不仅能改善单个智能体的基本能力,而且可从智能体的交互通信中进一步理解社会行为;最后,可以用模块化风格来组织系统[2].通常所研究的智能体具有自主性、交互性、协调性、分布性和智能性等特性,并具有自组织能力、学习能力和推理能力[3]. 采用多智能体网络理论解决实际应用问题,具有很强的鲁棒性、可靠性以及较高的问题求解效率. 多智能体技术在表达实际系统时,通过各智能体间的通讯、计算、协同、调度及控制来表达系统的结构、功能及行为特性. 由于在同一个多智能体系统中各智能体可以异构,因此多智能体技术对于复杂系统具有无可比拟的表达力,它为各种实际系统提供了一种统一的模型,即提供了一种统一的框架,其应用领域十分广阔. 在自然界中,多智能体网络可以是神经网络、生态系统、新陈代谢系统等;在社会中,多智能体网络可以是社交网络、经济网络等;在工程应用中,多智能体网络可以是电力网络、有线/无线通信系统、传感器网络、机器人网络等[4].多智能体网络的研究非常广泛,但不同主题之间交叉渗透,没有明显的界限. 粗略可以分为理论模型及应用和现实系统建模化两个方面[5],理论模型是对一类相似问题的数学抽象,是多智能体系统设计的基础. 在构建多智能体网络模型时,将根据行业特点进行建模,结合系统实际特性修正理论模型,并在此基础上对输入、输出条件和仿真参数进行合理的设置. 在优化理论模型的同时,开发仿真算法属于比较底层的研究,它不但很大程度上提高对现实系统的拟合程度,同时是对理论模型的补充和完善.从纵向来看,大多数的多智能体网络模型来自于自然现象,一群简单的个体以及简单的作用规则就能够产生令人惊讶的奇妙现象或群体行为,通过对这些现象不断研究、丰富和优化,对于理解自然和社会中的复杂现象具有非常重要的意义. 一方面,该研究的重大进展为复杂性研究特别是复杂系统提供了数学建模及分析方法;另一方面,对该系统的深入研究具有广泛的工程背景和应用前景. 近年来,多智能体网络的协调控制研究直接为无人驾驶飞行器的控制、人造卫星簇的控制、多智能水下航行器的控制、突发事件的应对、传染病的防治、生态系统的维护、可持续发展策略的制定提供重要的理论指导. 然而,从横向来看,应用领域逐渐扩充,从运输、军事、信息技术、航天航空等工程领域向经济管理、新闻传媒、市场研究、高等教育甚至图书情报等社会学领域渗透. 仿真分析作为重要的实验方法和可视化手段,承载着验证模型有效性以及为提升系统效率和解决实际问题提高数据保障的任务.由于多智能体网络展现出优良特性及应用前景,使得越来越多来自各个学科领域的学者纷纷投身到多智能体网络的研究中. 目前,多智能体网络理论模型及应用研究大体可分为两类基本问题:运动协调(包括一致性、聚集、编队等)和覆盖协调(包括搜救、部署、勘探等)[4]. 其中,运动协调主要着眼于个体之间动态的协调及博弈,而覆盖协调还进一步考虑了环境的因素. 本论文着重考虑运动协调中的一致性以及其扩展问题.1.2 分布式一致性在由智能节点组成的分布式网络中,一致性(英文为consensus,或称趋同,以下简称为一致性)意味着所有的节点通过信息交换和融合最终都达到一致,这依赖于节点的状态以及交互作用规则. 一致性问题的研究是从不同的领域开始的. 计算机科学家对一致性问题的研究有着很长的研究历史,为分布式计算这一领域的兴起开辟了道路[6]. 20世纪70年代,DeGroot研究了一致性问题在管理科学和统计学上的应用[7],开创了一致性问题研究的先河,也促使一致性问题成为学术界的热门话题而被广泛研究. DeGroot提出加权平均的方法来估计一组个体共有的包含某些未知变量的概率分布函数,他的理论在其诞生20年后再次出现于多传感器[8]和医疗专家系统[9]的不确定性信息融合领域. 网络环境下的分布式计算是在系统控制领域的传统问题,主要起源于Borkar 和Varaiya [10],Tsitsiklis [11],Tsitsiklis ,Bertsekas 和Athans [12]在分布式决策系统的渐近一致问题以及并行计算[13]上的开创性研究.同时,许多生物生态学家、物理学家和动物行为学家也从一些自然现象中得到了启发,诸如,鸟类和鱼类种群的迁徙. 鸟能成群结队的飞翔与迁徙,鱼群能聚集在不同的江海区域有序地休养、生息、繁殖,蚂蚁能遵循一些简单的规则发现最优的通向食物的路径,蝗虫能在没有领导者的前提下大规模的迁徙,萤火虫能有节奏地进行闪烁等. 这些种群的集体行为使得科学家受到极大的启发,随之提出相匹配的理论模型,并对这种群聚现象进行科学解释. 1987年,生态学家Reynolds 在经过长期观察种群的群体行为后提出了Boid 模型[14],将自然群体的集体行为描述为3条简单的规则:避免碰撞原则(collision avoidance)、速度匹配原则(velocity matching)和中心汇聚原则(flocking center). 通过仿真实验发现这些没有经过统一指挥的群体通过个体之间相互交换信息及本能的反映,最终形成有序的行为. 1995年,Vicsek 等人建立了个体之间的信息传递及一些简单的相互作用规则,获得了一个非常简单的数学方程来描述个体的动力学模型[15]. 通过仿真实验,发现整个群体表现出行为上的一致性. 实质上,Vicsek 模型是Reynolds 模型的一种特殊情况,它只考虑了3条规则中的速度匹配原则.而且,一致性问题也得到了系统控制领域学者的广泛关注. 2003年,Jadbabaie 等人研究了调整问题(alignment problem)中的一致性问题[16],并利用图论和Markov 链给出了严格的理论证明,结论展示:如果网络的底图在有限时间间隔内为一个无向的共同连通图,那么所有节点的状态最终将趋于一致. 这一结果也被Moreau [17],Ren 和Beard [18]推广到有向图中. 尽管Jadbabaie 首次为一致性问题给出了严格的理论证明,然而,他们的理论也有一个缺憾,即不能求解平均一致性问题[19],这将极大地限制了理论在无线网络中的应用. 2004年,Olfati-Saber 和Murray 基于Fax 和Murray 在车辆网络中协同控制的思想[20],提出了网络化动态系统求解一致性问题的基本框架[21],如下:()(()()),ii ij j i j x t a x t x t ∈=-∑N 或者(1)(1)(()()),ii i ij j i j x k x k a x k x k ∈+=++-∑N ò并给出了严格的理论证明. 同时,Olfati-Saber 和Murray 也考虑了带有通信时滞或者可变拓扑情况下的一致性问题,为后续的一致性研究奠定了基础.此外,一致性中的平均一致问题也得到了网络信息传播方面的专家的广泛关注. 2003年,Kempe等人受到谣言传播模型思想的鼓励,提出了push-sum机制以及基于此机制的一致Gossip算法[22],推导出算法通过有限次迭代能够收敛到初始测量的平均,并给出了算法的时间复杂度. 著名学者Boyd在2006年,给出了随机Gossip算法的一般框架[23],并给出了算法在同步和异步两种不同情况下的严格收敛性分析以及时间复杂度的证明. 最近,Dimakis提出了一个基于地理信息的Gossip算法[24],该算法结合了Gossip机制和地理信息路由机制;Aysal结合无线网络节点具有广播的特性,提出了一个广播Gossip算法[25],这两个算法均能有效地求解平均一致性问题,同时也增加了成对平均机制的多样性.现在,一致性问题已经成为国内外学者追踪的热点问题,并且已经获得了很多深刻的结果,详见文献[26-40]和专著[41,42],以及它们的参考文献. 然而,许多看似不同的问题,包括在科学与工程的各领域提取的互连的动态系统都与多智能体网络的一致性问题密切相关. 其中几个应用如下:耦合振子的同步:耦合振子同步问题的早期开创性工作源于Winfree,他假设每个振子与周围的振子之间存在强力作用,那么振子的振幅变化可以忽略,从而将同步问题简化为相位变化问题[43]. 在此基础上,Kuramoto指出一个具有有限个恒等振子的耦合系统,无论振子内部耦合强度多么微弱,它的动力学特性都可以用一个简单的相位方程来表示[44]. 此后,耦合系统的同步问题已经吸引了来自诸如物理、生物、神经科学和数学等众多领域的科学家的关注[45,46].蜂拥理论:群体蜂拥行为,即一群运动自主的个体能够形成并保持以团队的形式向某一目标地迈进,它能帮助生物躲避天敌,增加寻觅到食物的概率等. 这类现象所提取的抽象系统一般都由大量数目的个体组成,但是个体本身却很简单,它们没有中央控制器,只具备检测局部信息的能力,信息的交换和分享也只是在部分个体间进行,正是基于这些简单的局部信息的作用规则却能产生一些期望的宏观行为. 十几年来,生物学、物理学、计算机和控制等领域的学者对自然界的蜂拥行为产生了浓厚的兴趣[47-52],他们正在努力地从相应领域角度探索蜂拥行为的涌现机制. 最近,这一理论也用于装配了传感和通信原件的移动智能体作为移动传感网络解决分布式传感问题[53].分布式编队控制:所谓的编队控制就是多个智能设备在到达目的地的过程中,保持某种队形,即任意时刻各个智能设备之间的位置满足一种的数学关系,同时又要适应环境约束的控制技术[54]. 目前,编队控制的主要方法为基于行为法、人工势场法、跟随-领航法、虚结构法和模型预测控制(Model Prediction Control, MPC)法等[55]. 由于编队控制与分散控制相比能够缩短执行任务时间、提高系统的执行效率、降低系统成本,使其在军事、娱乐和生产等领域有广泛的应用. 分布式控制的成功,使得以前单个智能设备难以完成的任务,现在可以由多个智能设备通过信息交互来实现. 在此类问题中,多智能设备的分布式编队控制因不需要中央控制和全局信息,只能通过有限的传感能力和通讯能力来实现编队,引起广大研究者的兴趣[56-58].传感器网络的分布式信息融合:在分布式传感器网络中,分布式信息融合即每个传感器都独立地处理它的局部规则,产生局部航迹送到中心节点,在那里进行航迹的关联和融合[59]. 分布式融合结构的特点是可以较低的费用获得较高的可靠性和可用性,可以减少数据总线的频率和降低处理要求;通讯延时小,用户能快速存取融合结果;并且具有集中式结构类似的精度. 在分布式传感器网络中,需要实施Kalman滤波[60,61]、最小二乘估计[62]以及新颖的低通和高通一致滤波器[60,63]来求解分布式平均问题.空间汇聚:汇聚问题由Ando等人[64]提出,主要解决通过智能体之间的信息交换以及作用规则,使得所有的智能体移动到某个汇聚点的问题[65]. 在包含位置信息的互连拓扑中,多个智能个体的汇聚问题就相当于在位置上达成一致. 汇聚问题可以看作是一类非受限的一致性问题,因此,对于变拓扑结构的网络,研究汇聚问题将是一个挑战. Lin等人给出了连续系统汇聚问题的充分条件,即任意时刻多智能体网络都是连通的就能保证收敛[66],在此之后也吸引了较多的学者的关注[67-69].1.3 分布式协同估计及优化正如上一节所述,一致性问题在无线传感器网络信息融合中有着广泛应用,因此,本节着重介绍无线传感器网络信息融合中的首要问题——估计问题. 关于无线网络的估计问题,已经有很多深刻的结论. 根据被检测的变量是否有动态特性,可以分为参数估计和状态估计[70]. 根据无线网络的结构特点,大体可以分为基于融合中心的估计和分布式估计. 基于融合中心的估计[71],通常假设网络中存在一个处理能力强大的融合中心,其负责收集网络中所有节点的感知数据,然后对收集到的数据进行统一处理. 而分布式估计中所有节点都是对等的,每个节点仅能获得邻居节点的局部数据,并采用局部信息交换和迭代的方式完成节点对自身估计值的更新. 基于融合中心的估计,其融合中心承载了几乎所有的数据处理任务,这对于网络抵御外部攻击是不利的,而且过多的冗余数据传输也会降低网络的生命周期. 对比来看,分布式估计具有更强的鲁棒性和可扩展性. 本论文主要考虑无线网络中的分布式估计问题.由于网络中每个节点数据的局部性使得节点之间存在较大差异,因而消除节点之间差异以达到所有节点对目标参数的一致性描述,即分布式一致问题. 在无线传感器网络中,平均共识(即平均一致问题,Average Consensus)问题是一类十分重。
第4章一阶多智能体机器人系统

(4-19)
并且
因此, = ∈ ℂ: − ≤ 。另一方面,这 个圆盘都被包含
在最大半径 max 的圆盘 中。显而易见,矩阵 − 的所有特征值
都位于圆盘 ′ = ∈ ℂ: + max ≤ max
关于虚轴 (imaginary axis) 的镜像。
无人车的位置达到一致。当位置达到一致后,由于所有无人车之间的相对
位置误差为零,因此所有无人车的控制输入也均为零 1 = 2 = 3 = 0,
无人车系统实现关于位置的一致性控制,即
lim −
→∞
=0
6
4.1 一阶机器人系统模型
不失一般性,针对一阶多智能体系统,系统中单个智能体的状态应满
中,圆盘 ′
是
27
4.2.2 设计控制器
定理4.1
针对由式 (4-12) 所构成的多智能体系统,假设系统的通信拓扑图是无
向连通图或含有生成树的有向图,那么使用如式 (4-14) 的控制器时系统可
实现如定义4.1所描述的一致。系统状态的最终一致性值为
∗ = σ=1 1 0
(4-3)
其中 = 0, = 1。
7
4.1 一阶机器人系统模型
假设多智能体系统中智能体的数量为 ,令 = 1 2 ⋯ T ,
= 1 2 ⋯ T ,那么基于式 (4-3) 的一阶多智能体系统可以表示
为
ሶ 1
0 0
ሶ 2
0 0
=
⋮
⋮ ⋮
ሶ
0 0
⋯ 0 1
ሶ 1 = 1
ሶ 2 = 2
⋮
(4-8)
ሶ =
12
4.1 一阶机器人系统模型
人工智能试题库(附参考答案)
人工智能试题库(附参考答案)一、单选题(共103题,每题1分,共103分)1.数据挖掘技术主要有分类、估计、()、关联分析和预报。
A、假设B、回归C、统计D、聚类正确答案:D2.深度学习可以用在下列哪些NLP任务中?A、情感分析B、问答系统C、机器翻译D、所有选项正确答案:D3.关于Python和Numpy的切片,以下说法正确的是()A、python对列表的切片得到的是列表的副本,numpy数组切片得到的是指向相同缓冲区的视图B、numpy数组切片得到的是数组的副本,python对列表的切片得到的是指向相同缓冲区的视图C、python对列表的切片和numpy数组切片得到的都是指向相同缓冲区的视图D、python对列表的切片和numpy数组切片得到的都是原对象的副本正确答案:A4.当在内存网络中获得某个内存空间时,通常选择读取矢量形式数据而不是标量,这里需要的哪种类型的寻址来完成A、基于位置的寻址B、基于内容的寻址C、都可以D、都不行正确答案:B5.随着卷积层数的增加,下面描述正确的是:①.在一定层数范围内,效果越来越好②.能够抽取的特征更加复杂③.层数越多越容易发生梯度消失A、②③B、①②③C、①②D、①③正确答案:B6.模型有效的基本条件是能够()已知的样本A、结合B、聚集C、拟合D、联合正确答案:C7.不属于深度学习模型的选项是?A、朴素贝叶斯B、深度残差网络C、卷积神经网络 CNND、循环神经网络 RNN正确答案:A8.ONE-HOT-ENCODING 可用于什么特征处理A、类别型特征B、有序性特征C、数值型特征D、字符串型特征正确答案:A9.衡量模型预测值和真实值差距的评价函数被称为()A、损失函数B、激活函数C、无参数函数D、矩阵拼接函数正确答案:A10.生成式方法是直接基于(___)的方法?A、生成式模型B、生成式数据C、生成式场景D、生成式学习正确答案:A11.以下哪类算法属于关联分析()。
外部扰动下一类车辆跟驰模型的稳定性分析
外部扰动下一类车辆跟驰模型的稳定性分析杜文举;李引珍;张建刚;俞建宁【摘要】为了研究交通拥堵问题,基于多智能体一致性理论对一类车辆跟驰模型的稳定性进行了研究.利用Lyapunov稳定性理论,通过设计适当的控制器使得车辆跟驰模型趋于稳定,并得到了模型稳定性的条件.此外,在车辆受到不确定的外部扰动的情形下,研究了车辆跟驰模型的稳定性.最后,采用Matlab仿真技术进行了数值模拟,结果表明在设计的控制器下,车辆跟驰模型快速趋于稳定,拥堵现象得到了有效的缓解.【期刊名称】《兰州交通大学学报》【年(卷),期】2019(038)001【总页数】7页(P43-49)【关键词】车辆跟驰模型;外部扰动;多智能体一致性;稳定性;交通拥堵【作者】杜文举;李引珍;张建刚;俞建宁【作者单位】兰州交通大学交通运输学院,甘肃兰州 730070;兰州交通大学交通运输学院,甘肃兰州 730070;兰州交通大学数理学院,甘肃兰州 730070;兰州交通大学交通运输学院,甘肃兰州 730070【正文语种】中文【中图分类】U121;TP391近年来,随着我们国家经济的快速发展以及人们生活水平不断的提高,汽车的保有量也随之迅速的增长.目前,我国城市交通发展存在出行难、交通时间成本不断增加等一系列的问题,城市交通发展问题急需解决.北京、上海等许多大城市的交通拥堵问题也变得越来越严重,这给人们的出行带来了许多的不便,同时也造成了城市环境得污染和频发的交通事故.所以,减少和缓解交通拥堵是我们目前急需解决的问题.作为交通工程理论里新兴的研究领域之一,交通流理论是解决交通问题的重要理论.从描述的方法来看,交通流模型分为:宏观模型、微观模型以及介观模型,其中微观交通流模型主要有元胞自动机模型与跟驰模型.跟驰模型是把交通流当中的车辆看作分散的质点,在不存在超车的情形下,对单个车辆跟驰前车的方式进行观察分析以此来了解单车道上交通流的特性.目前,已经有不少学者对车辆跟驰模型进行了研究[1-5].Zhang等[6]研究了经典车辆跟驰模型的稳定性,并用线性化和数值积分法分析了其非线性模型.Huijberts[7]研究了圆形巴士路线上跟车模型的同步运动,并用根轨迹法研究了不同类型同步运动的局部稳定性.Sun等[8]利用线性稳定性理论研究了一类新的跟车模型的中性稳定.Chen等[9]提出了一种行为车辆跟随模型,并对个体驾驶员在整个振荡周期中的跟随行为进行了分析.Li等[10]研究了考虑驾驶员反应时滞的一般非线性车辆跟驰模型的稳定策略.Yu等[11]分析了车辆间隙波动与车辆加速或减速的联系,提出了一类考虑车辆间隙波动的扩展车辆跟驰模型.Li等[12]提出了一种全局直接搜索和局部梯度搜索相结合的全局优化算法,结果表明该算法收敛速度快和寻找全局最优解的概率高.在控制理论中,稳定性是系统最基本的性质,也是保证系统正常运行的首要条件. 分析系统稳定性的方法主要有根轨迹法、罗斯霍尔维兹判据、李雅普诺夫第二方法以及奈奎斯特判据等.目前,已有许多的学者对现实中的各种系统的稳定性进行了研究[13-17].然而,在自然界中存在着大量的不确性因素,这些不确定的因素一方面是由于外界激励引起的随机性,另一方面是由于结构内部参数的随机性.许多的真实系统都会受到外部环境扰动的影响,外部扰动常常是造成系统不稳定的重要原因.因为外部扰动广泛的研究背景,其在复杂网络中的研究得到了许多学者的关注,而它与多智能体一致性之间的关系也成为了研究的热点.Lin等[18]用方法解决了在固定及切换巧扑下的带有外部扰动的多智能体的一致性问题.顾建忠等[19]研究了带有未知参数和外界干扰的多智能体系统的一致性问题.Andreasson等[20]设计了一种分布式比例积分控制器,用来抵消有一阶,二阶积分器动力学模型的多智能体系统中的外部常数扰动.曹伟俊[21]基于一类新提出的一致性算法,对具有外部扰动的多智能体的平均一致性问题进行了分析.宗鑫[22]针对一类存在通信延迟的二阶多智能体系统,分析了该系统在固定拓扑结构以及变化拓扑结构两种情况下的一致性问题.陈磊[23]针对多智能体系统跟踪控制问题中存在的通讯结构不稳定、信息不完全可知、时延以及外部扰动等,详细研究了其在不确定因素下的自适应跟踪控制问题.本文主要基于多智能体一致性理论,通过设计适当的控制器,对一类车辆跟驰模型的稳定性进行了研究.1 车辆跟驰模型1961年,Newell[24]使用“速度-车间距函数(Velocity-headway function)”的概念,提出了如下跟驰模型:(1)优化函数为(2)其中:v0是期望速度;xc是安全距离;Ts是高密度交通情况下跟车行为的安全时间间隔.1995年,Bando等[25]基于“速度-车间距函数”的概念,进一步提出了如下修正模型:(3)其中:a表示加速度常数;V(h)是“速度-车间距函数”.在该模型中,司机首先判断自己的车和前车的车头间距xi+1(t)-xi(t),然后确定一个理想的行驶速度V(xi+1(t)-xi(t)).一般情况下,理想的行驶速度和实际的速度vi(t)之间总是有着一定的差别,汽车司机要对这个差别进行判断,而且要通过控制汽车的加速度来减少此差别,故而达到理想速度.图1表示一般的车辆跟驰行为,其中:vi(t)是当前时间第i辆车的行驶速度;xi(t)是当前时间第i辆车的位置;hi(t)是当前时间第i辆车与前车的车头间距.令hi(t)=(xi-1(t)-xi(t)),将其代入方程(3),可将模型(3)化为(4)其中:a>0表示司机的敏感系数;vi(t)表示在t时刻第i辆车的速度;V(hi(t))表示优化速度函数;hi(t)表示在t时刻车道当中第i-1辆车和第i辆车的车头间距.选择如下优化速度函数:V(hi(t))=tanh(hi(t)-hd)+tanh(hd),(5)其中:hd表示理想的车头间距.图1 车辆跟驰行为Fig.1 The car-following behavior2 跟驰模型的稳定性分析考虑行驶在单行道上的N辆车,每一辆车可看作图G的一个节点,令A=(aij)∈RN×N表示前后车辆效应关系的邻接矩阵,其中aij定义为:如果车辆j 是当前车辆i(i≠j)的前方最近邻车辆, 则aij=1;否则aij=0.由于当前车辆i(i=2,3,…,N)与其前方最近邻车辆i-1相连接,且头车以某一恒定速度行驶.因此,我们可以得到如下车辆运行的邻接矩阵如果车辆的理想速度为v0,理想的车头间距h0,本文的目的是要用多智能体一致性理论,通过设计合适的控制器,使得所有车辆都以速度v0,并保持车头间距h0有序的行驶.设计如下一致性控制器:(6)其中:lij=-aij,i≠j且为待定的常数.则给模型(4)加入控制器后可写成(7)令误差系统为(8)则受控系统(7)可化为(9)其中:令eh(t)=[eh1(t),eh2(t),…,ehN(t)]T,ev(t)=[ev1(t),ev2(t),…,evN(t)]T,可将模型(9)化为(10)其中:A=diag{a,a,…,a},那么,求解模型(4)的一致性问题就转化成了证明系统(10)稳定性的问题.引理1 优化速度函数V(hi(t))是连续、非负的单调递减函数,并且存在常数k>0,使得对∀hi(t),hj(t)∈Rn,都有‖V(hi(t))-V(hj(t))‖≤k‖hi(t)-hj(t)‖.定义1 若则说明系统实现了渐进一致.定理1 若满足则模型(4)实现了渐进一致.证明令e(t)=[eh(t),ev(t)]T,则误差系统(10)可化为e(t),(11)构造如下Lyapunov函数:V1(t)=eT(t)Pe(t),(12)其中:P>0,则根据Cauchy不等式ATB+BTA≤μATA+μ-1BTB,∀μ>0,可得因此,可以得到其中:所以,当时,因此,由Lyapunov稳定性理论可知,误差系统(10)是渐进稳定的.所以,跟驰模型(4)在控制器(6)的作用下达到一致,即所有车辆都以速度v0,并保持车头间距h0有序的行驶.在实际生活中,车辆会受到不确定的外部扰动的影响,比如车辆故障、恶劣天气和道路施工等等.所以,研究外部扰动情形下车辆跟驰模型的稳定性有着非常重要的意义.假设δi(t)是施加给车辆i的外部干扰项,那么带有外部扰动的车辆跟驰模型可表示为(13)那么,相应的误差系统为(14)其中:δ(t)=[δ1(t),δ2(t),…,δn(t)]T;I为相应阶数的单位矩阵.定理2 若满足则模型(13)实现了渐进一致.证明构造如下Lyapunov函数:V2(t)=eT(t)Pe(t),(15)其中:P>0,则其中:因此,当时,由Lyapunov稳定性理论可知,误差系统(14)是渐进稳定的.因此,带有外部扰动的跟驰模型(13)达到渐进一致,即所有车辆都以速度v0,并保持车头间距h0有序的行驶,有效地缓解了交通拥堵.3 数值仿真在接近开放边界条件下对模型进行仿真,考虑行驶在单车道上的20辆车.模型中参数的取值为:hd=2 m,a=1.2 s-1,h0=7 m,v0=20 m/s,且假设所有车辆具有相同的参数,初始的车头间距hi(0)在区间[4,12]内随机选取,初始速度vi(0)在区间[14,33]内随机选取,车辆的初始速度和初始的车头间距都不相等,这样研究更具有一般性.首先,对模型不加控制器,我们得到车头间距hi(t)与速度vi(t)随时间的演化曲线,如图2所示. 由图2看到,在没有加入控制器的情况下,整个系统都没有趋于稳定,也就是说出现了交通拥堵现象.下面,我们将控制器加入到模型中,取控制参数α=0.2,β=0.1,其他参数保持不变,可以得到如图3所示的误差收敛曲线以及hi(t)与vi(t)随时间的演化曲线.由图3(a)和3(c)看到,所有的车头间距hI(t)(i=1,2,…,19)与我们设置的理想的车头间距h0的差值在50 s都趋于0;同时所有的车头间距hi(t)在50 s趋于h0=7 m.由图3(b)和3(d)看到,所有的车辆的速度vi(t)(i=1,2,…,20)与头车的速度v0的差值在50 s都趋于0;同时所有车辆的速度vi(t)在50 s趋于v0=20 m/s.这表明,加入了控制器后,系统在50 s就达到稳定状态,即加入控制器后,使得车辆行驶顺畅,明显地缓解了交通拥堵.图2 未加控制器时车头间距与速度随时间的演化曲线Fig.2 The headway distance variation curves and the instantaneous velocity of all vehicleswithout the controller下面考虑在外部扰动的情形下,车辆跟车模型的稳定性.假设在70≤t≤80时刻,对第1,5,10辆车施加外部扰动15sin(5t)+15cos(5t),得到在外部扰动的情形下的误差收敛曲线以及车头间距hi(t)与速度vi(t)随时间的演化曲线,如图4所示.由图4看到,尽管对第1, 5, 10辆车所施加的外部扰动对其后面的车辆产生了影响,但加入本文设计的控制器之后,外部扰动对系统的影响被有效的抑制了.从图4(c)和4(d)可以看到,外部扰动使得车辆的速度产生了明显的波动,但是当外部扰动消失之后,所有车辆的速度都迅速趋于预先设定的速度v0=20 m/s,并保持车头间距h0=7 m有序的行驶.图3 加入控制器时车头间距和车辆速度的误差收敛曲线、车头间距与速度随时间的演化曲线Fig.3 The error convergence curve of headway distance and vehicles velocity, the headway distance variation curves and the instantaneous velocity of all vehicles when the controller is added图4 外部扰动下车头间距和车辆速度的误差收敛曲线、车头间距与速度随时间的演化曲线Fig.4 The error convergence curve of headway distance and vehicles velocity, the headway distance variation curves and the instantaneous velocity of all vehicles with external disturbances4 结论本文运用多智能体的一致性理论,对一类跟驰模型进行稳定性分析,得到了系统保持稳定性的条件.此外,当系统加入外部扰动后,我们通过设计适当的控制器使得该模型趋于稳定. 数值模拟表明,加入本文设计的控制后的跟驰系统的稳定性明显增强,本文的控制方法能够很好的抑制跟驰模型中的交通拥堵问题.【相关文献】[1] GIPPS P G.A behavioural car-following model for computersimulation[J].Transportation Research Part B:Methodological,1981,15(2):105-111.[2] CHAKROBORTY P,KIKUCHI S.Evaluation of the general motors based car-following models and a proposed fuzzy inference model[J].Transportation Research Part C:Emerging Technologies,1999,7(4):209-235.[3] 陈晓强,孟建军,胥如迅,等.纯微观车辆跟驰行为研究与仿真[J].兰州交通大学学报,2014,33(6):123-126.[4] KENDZIORRA A,WAGNER P,TOLEDO T.A stochastic car followingmodel[J].Transportation Research Procedia,2016,15:198-207.[5] WANG J,RAKHA H A,FADHIOUN K.Validation of the Rakha-Pasumarthy-Adjerid car-following model for vehicle fuel consumption and emission estimationapplications[J].Transportation Research Part D:Transport & Environment,2017,55:246-261.[6] ZHANG X,JARRETT D F.Stability analysis of the classical car-followingmodel[J].Transportation Research Part B:Methodological,1997,31(6):441-462.[7] HHIJBERTS H J C.Analysis of a continuous car-following model for a busroute:existence,stability and bifurcations of synchronous motions[J].Physica A:Statistical Mechanics & Its Applications,2002,308(1-4):489-517.[8] SUN D H,LIAO X Y,PENG G H.Effect of looking backward on traffic flow in an extended multiple car-following model[J].Physica A:Statistical Mechanics & ItsApplications,2011,390(4):631-635.[9] CHEN D,LAVAL J,ZHENG Z,et al.A behavioral car-following model that captures traffic oscillations[J].Transportation Research Part B:Methodological,2012,46(6):744-761. [10] LI S,YANG L,GAO Z,et al.Stabilization strategies of a general nonlinear car-following model with varying reaction-time delay of the drivers[J].ISA transactions,2014,53(6):1739-1745.[11] YU S,SHI Z.An extended car-following model considering vehicular gapfluctuation[J].Measurement,2015,70:137-147.[12] LI L,CHEN X,ZHANG L.A global optimization algorithm for trajectory data based car-following model calibration[J].Transportation Research Part C:Emerging Technologies,2016,68:311-332.[13] 陈帝伊,杨朋超,马孝义,等.水轮机调节系统的混沌现象分析及控制[J].中国电机工程学报,2011,31(14):113-120.[14] 陈帝伊,郑栋,马孝义,等.混流式水轮机调节系统建模与非线性动力学分析[J].中国电机工程学报,2012,32(32):116-123.[15] 刘永忠.土质高边坡在饱和状态下的稳定性分析[J].兰州交通大学学报,2014(1):181-185.[16] 陈帝伊,丁聪,把多铎,等.水轮发电机组系统的非线性建模与稳定性分析[J].水力发电学报,2014,33(2):235-241.[17] 刘义才,刘斌,张永,等.具有双边随机时延和丢包的网络控制系统稳定性分析[J].控制与决策,2017,32(9):1565-1573.[18] LIN P,JIA Y,LI L.Distributed robustconsensus control in directed networks of agents with time-delay[J].Systems & Control Letters,2008,57(8):643-653.[19] GU J Z,YANG H Y.Distributed adaptive control for multi-agent consensus with uncertainties[J].Chinese Journal of Engineering Mathematics,2012(5):741-748.[20] ANDREASSON M,DIMAROGONAS D V,SANDBERG H,et al.Distributed control of networked dynamical systems:static feedback,integral action and consensus[J].IEEE Transactions on Automatic Control,2013,59(7):1750 - 1764.[21] 曹伟俊.带有扰动的多智能体系统的一致性研究[D].北京:北京化工大学,2015.[22] 宗鑫.随机时延二阶多智能体系统的一致性控制[D].临汾:山西师范大学,2016.[23] 陈磊.不确定因素影响的多智能体系统跟踪控制方法研究[D].成都:电子科技大学,2017.[24] NEWELL G F.Nonlinear effects in the dynamics of car following[J].Operations Research,1961,9(2):209-229.[25] BANDO M,HASEBE K,NAKAYAMA A,et al.Dynamical model of traffic congestion and numerical simulation[J].Physical Review E,1995,51(2):1035-1042.。
领导-跟随混合阶异质多智能体系统的一致性

领导-跟随混合阶异质多智能体系统的一致性
高林庆;王超;哈登喆;耿华;侯帅
【期刊名称】《河北大学学报(自然科学版)》
【年(卷),期】2024(44)1
【摘要】混合阶异质多智能体系统由静态领导者和一阶、二阶和三阶积分器型跟随者组成.首先,在无向和有向通讯网络条件下,利用设计线性滤波器的方法提出了一致性协议;其次,基于李雅普诺夫直接法、拉塞尔不变集原理和矩阵理论证明了协议的可行性;最后,通过2个仿真算例验证了所得结论的有效性.
【总页数】9页(P104-112)
【作者】高林庆;王超;哈登喆;耿华;侯帅
【作者单位】河北工程大学水利水电学院;河北工程大学信息与电气工程学院;天津大学建筑工程学院
【正文语种】中文
【中图分类】TP13
【相关文献】
1.基于领导者-跟随者模型的异质多智能体系统一致性
2.二阶多智能体系统的领导—跟随异步脉冲一致性
3.二阶领导跟随多智能体系统事件触发一致性
4.事件触发脉冲控制下二阶多智能体系统的领导跟随一致性
因版权原因,仅展示原文概要,查看原文内容请购买。
人工智能基础(习题卷42)

人工智能基础(习题卷42)第1部分:单项选择题,共50题,每题只有一个正确答案,多选或少选均不得分。
1.[单选题]假设有n组数据集,每组数据集中,x的平均值都是9, x的方差都是11, y的平均值都是7.50, x与y的相关系数都是0.816,拟合的线性回归方程都是 y=3.00+0.500x。
那么这n组数据集( )。
A)一样B)不一样C)无法确定是否一样答案:C解析:只比较平均值、方差、相关系数和回归方程,无法确定数据集是否相同,还需比 较 Ansc。
mbe's quartet。
2.[单选题]_____是百度AI的人脸识别Python SDK客户端。
A)AipOcrB)AipFaceC)AipImageCensorD)AipImageClassify答案:B解析:3.[单选题]以下关于最大似然估计MLE的说法正确的是A)MLE中加入了模型参数本身的概率分布B)MLE认为模型参数本身概率是不均匀的C)MLE体现了贝叶斯认为参数也是随机变量的观点D)MLE是指找出一组参数,使得模型产生出观测数据的概率最大答案:D解析:4.[单选题]如果拉力( )阻力,无人机的飞行速度会逐渐增大;如果拉力( )阻力,无人机的飞行速度会逐渐减小A)小于,小于B)小于,大于C)大于,小于D)大于,大于答案:C解析:5.[单选题]表达式 int('123', 8) 的值为_____。
A)83B)12C)84D)84答案:A解析:6.[单选题]Linux 中权限最大的账户是( )。
A)adminB)guest答案:A解析:7.[单选题]搜索可以分为盲从搜索与A)启发式搜索B)模糊搜索C)精确搜索D)关键词搜索答案:A解析:搜索分为盲从搜索与启发式搜索8.[单选题]( )是技能获取的过程。
A)环境B)学习C)评价D)知识库答案:B解析:9.[单选题]计算机软件分系统软件和应用软件两大类,其中系统软件核心是A)数据库管理系统B)操作系统C)程序语言系统D)财务管理系统答案:B解析:10.[单选题]归结原理的特点是(___)A)发明新的概念和关系B)发现更多的规则C)缓解过拟合的风险D)将复杂的逻辑规则与背景知识联系起来化繁为简答案:D解析:11.[单选题]EM算法通过迭代求L(theta)=logP(Y|theta)的(),每次迭代交替进行求期望和求极大化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
一阶积分器多智能体模型达到平均一致的必要条件1. 引言1.1 概述在多智能体系统中,实现一致性是一个重要的问题。
而平均一致是多智能体系统中最常见的一种一致性目标,它要求系统中的所有智能体达到相同的状态或值。
为了实现平均一致,我们可以考虑使用具有一阶积分器特性的控制算法。
本文主要研究了一阶积分器多智能体模型,并探讨了达到平均一致所必需的条件。
通过对通信网络连接性以及控制算法设计和参数选择进行分析,我们将揭示实现平均一致所必备的关键因素。
1.2 文章结构本文将按照以下结构来介绍一阶积分器多智能体模型达到平均一致的必要条件:- 引言:对文章进行概述并介绍文章结构。
- 一阶积分器多智能体模型:介绍一阶积分器和多智能体系统,并详细解释平均一致性目标。
- 必要条件一:通信网络连接性:讨论通信网络拓扑结构的选择、通信容量要求以及数据传输可靠性保障。
- 必要条件二:控制算法设计与参数选择:探讨控制算法的选取原则与方法论,以及参数选择和调优策略,并介绍控制器稳定性证明方法论。
- 结论:总结所得必要条件和要点,并对研究结果进行讨论和展望。
1.3 目的本文的目的是揭示一阶积分器多智能体模型达到平均一致所必需的条件。
通过对通信网络连接性和控制算法设计与参数选择进行研究,我们将提供了实现平均一致性的关键因素。
这对于多智能体系统中实现协同控制、集成决策等领域具有重要意义。
通过深入了解这些必要条件,可以为未来针对多智能体系统的设计提供指导。
2. 一阶积分器多智能体模型:在本节中,我们将介绍一阶积分器多智能体模型及其相关概念。
首先,我们将对一阶积分器进行概念介绍,然后概述多智能体系统,并介绍平均一致性作为目标。
2.1 一阶积分器概念介绍:一阶积分器是指在控制系统中使用的一种基本组件。
它是一个线性时间不变系统,其输出是输入信号的累积值。
它可以通过对输入信号进行连续求和来实现。
与其他类型的控制器相比,一阶积分器具有简单的结构和功能。
它具有良好的稳定性特性,并且对于处理时间延迟和噪声等问题也很有效。
2.2 多智能体系统概述:多智能体系统是由许多互相交互的智能体组成的集合体。
每个智能体都具有自主决策和行动能力,可以通过与其他智能体进行通信和协作来达到某种目标。
多智能体系统具有复杂的动力学行为和非线性特性。
在这些系统中,各个智能体之间不仅存在信息传递和共享,还会相互影响彼此的状态和行为。
2.3 平均一致性目标介绍:平均一致性是指多智能体系统中各个智能体之间达到状态或行为的一致性。
通过合理的协作和通信,多智能体系统可以实现平均一致性,并且在此过程中获得期望的全局性能。
平均一致性对于很多多智能体系统的应用都至关重要。
例如,在无人车编队控制中,每辆车需要与其他车辆保持一定的距离和速度一致,以确保整个编队的稳定和安全。
总之,在本节中,我们介绍了一阶积分器多智能体模型及其相关概念。
我们讨论了一阶积分器基本原理、多智能体系统概述以及平均一致性作为目标的重要性。
下一节将讨论实现这种模型所需的必要条件之一:通信网络连接性。
3. 必要条件一:通信网络连接性3.1 网络拓扑结构的选择在一阶积分器多智能体模型中,通信网络的拓扑结构的选择是实现平均一致性目标必不可少的第一个条件。
常见的网络拓扑结构包括星型、环形、全连通等形式。
对于星型网络,所有智能体都直接与中心节点相连,这种结构简单易行,但对通信链路有较高的要求,并且对系统容错性较低。
环形网络则是将每个智能体与相邻的两个智能体连接,使得信息可以在整个网络中传递。
而全连通网络则是每个智能体与其他所有智能体直接相连,实现了更好的信息传递和容错性能。
根据具体应用需求和资源限制等因素,选择合适的网络拓扑结构是至关重要的。
需要考虑到通信链路质量、延迟、带宽以及节点之间距离等因素,并在此基础上进行合理权衡和选择。
3.2 通信容量的要求为了保证一阶积分器多智能体模型达到平均一致性目标,通信网络需要具备足够大的容量来传输智能体之间的状态信息和控制指令。
通信容量的要求与网络拓扑结构密切相关。
对于星型网络,中心节点需要具备足够高的带宽来同时处理所有连接的智能体之间的信息传递。
环形或全连通网络中,每个智能体都需要具备足够的带宽来传输信息,因为信息需要在整个网络中传递。
通信容量的大小与系统中智能体数量和信息传输频率等因素有关。
如果容量过小,则可能导致信息丢失或延迟,从而影响系统的一致性;反之,如果容量过大,则会浪费资源。
3.3 数据传输的可靠性保障为了确保一阶积分器多智能体模型达到平均一致性目标,通信网络还需要提供可靠的数据传输保障。
数据传输过程中产生错误、丢失或延迟等问题都可能影响系统的一致性。
为了保障数据传输的可靠性,可以采用各种纠错码、重传机制和冗余设计等技术手段。
这些方法可以帮助检测和纠正数据中的错误,在网络不稳定或存在干扰时提供更高层次的可靠性。
除此之外,还可以考虑使用多路径传输、监测和管理网络拥塞等方式来提高数据传输的可靠性。
通过采取这些措施,可以有效降低通信中断、数据丢失以及延迟等问题的发生,从而保证一阶积分器多智能体系统的稳定性和一致性。
综上所述,通信网络连接性是一阶积分器多智能体模型达到平均一致的必要条件之一。
需要选择合适的网络拓扑结构、具备足够大的通信容量以及提供可靠的数据传输保障,以确保信息在智能体之间有效传递并实现系统的平均一致性目标。
4. 必要条件二:控制算法设计与参数选择随着一阶积分器多智能体模型的应用增多,设计合适的控制算法和选取适当的参数成为实现平均一致性的必要条件之一。
本部分将详细介绍控制算法设计与参数选择方面的内容。
4.1 控制算法选取原则与方法论在选择控制算法时,需要考虑系统复杂性、通信延迟、鲁棒性等因素。
下面是一些常用的控制算法选取原则和方法论:首先,可以考虑基于领导者/跟随者(leader/follower)架构的算法。
在这种架构中,一个或多个智能体被指定为领导者,而其他智能体则跟随其运动状态进行调整。
这种方法可以简化系统结构和通信需求。
其次,可以使用去中心化或分布式控制策略。
去中心化策略使每个智能体都具有相同的功能和决策能力,并允许它们通过局部交互来实现协作。
分布式控制策略则允许不同智能体之间进行信息传递和决策,但没有明确的全局规划或调度。
另外,一些协同控制策略如一致性算法、最优化算法和自适应控制算法等也可以考虑。
这些算法能够基于智能体之间的信息交互和目标函数优化来实现平均一致性。
4.2 参数选择与调优策略除了选择合适的控制算法,正确地选择参数并进行调优也是非常重要的。
以下是一些建议和方法用于参数选择与调优:首先,需要根据具体问题和系统特性,在设计阶段确定合理的初始参数范围。
这些参数可能包括通信延迟、传输速率、反馈增益等。
其次,可以采用试错方法来进行参数调整。
通过在仿真或实验环境中测试不同的参数组合,并评估系统响应和性能指标,以找到最佳的参数配置。
此外,使用优化算法也是一个有效的方式。
例如,可以使用遗传算法、粒子群优化等计算智能方法来搜索最佳参数组合,以最大程度地满足平均一致性要求。
4.3 控制器稳定性证明方法论为了确保所选取的控制算法和参数能够实现平均一致性,并且系统稳定性得到保证,需要进行相应的控制器稳定性证明。
以下是一些常用的控制器稳定性证明方法论:首先,可以使用线性系统理论来分析系统的稳定性。
通过建立系统模型并计算系统特征值,以确定系统是否稳定。
其次,可以采用李雅普诺夫稳定性理论来证明控制器的稳定性。
该理论通过构造和验证合适的李雅普诺夫函数,来推断出系统稳定性。
另外,也可以利用Lyapunov-Krasovskii稳定性理论等其他非线性控制稳定性理论进行分析和证明。
需要注意的是,在进行控制器稳定性证明时,还应考虑通信延迟、丢包等可能影响系统动态特性和一致性的因素,并进行相应的修正和调整。
综上所述,在实现一阶积分器多智能体模型平均一致目标时,正确选择合适的控制算法并选择适当的参数是至关重要的。
通过综合考虑通信网络连接性以及控制算法设计与参数选择两个必要条件,可以更好地实现多智能体系统在平均一致方面的优化和协同行为。
5. 结论5.1 总结所得必要条件和要点通过本文的研究,我们总结出了一阶积分器多智能体模型达到平均一致的必要条件和要点。
这些条件包括通信网络连接性和控制算法设计与参数选择两个方面。
在通信网络连接性方面,首先需要选择适当的网络拓扑结构,以确保智能体之间具有良好的通信连接。
其次,通信容量需要满足一定的要求,以确保信息传输的顺利进行。
最后,在数据传输过程中需要保证可靠性,即数据能够准确、完整地传输到目标智能体。
在控制算法设计与参数选择方面,我们需要遵循一定的方法论来选取合适的控制算法。
同时,参数选择与调优策略也是至关重要的,合理地选择和调整参数可以提高系统性能。
此外,在控制器稳定性证明方面也需要采用相应的方法论来验证系统稳定性。
5.2 对研究结果的讨论和展望本文针对一阶积分器多智能体模型达到平均一致提出了必要条件和要点,但仍有一些问题值得进一步讨论和研究。
首先,对于通信网络连接性,我们可以进一步探究不同网络拓扑结构的优劣和适用性。
同时,研究如何提高通信容量以满足更复杂的智能体系统需求也是一个重要的方向。
其次,在控制算法设计与参数选择方面,我们可以考虑更多的控制算法,并比较它们在不同应用场景下的性能差异。
此外,进一步研究控制器稳定性证明的方法论可以提供更深入的理解和优化策略。
最后,《一阶积分器多智能体模型达到平均一致的必要条件》只是一个起点,我们鼓励学者们继续深入研究这个领域。
未来还可以将其他因素如噪声、非线性等纳入考虑,并探索更多实际应用中的问题。
总而言之,本文为一阶积分器多智能体模型达到平均一致提供了可行的必要条件和要点,并展望了未来可能的研究方向。
通过进一步深入研究和探索,我们相信在这个领域中会取得更加丰富和实用的成果。