五自由度磁悬浮电主轴的结构设计与仿真
薄圆盘形转子5自由度磁悬浮轴承系统研究

参考文献:
[1] Koichi Oka,Toshiro Higuchi.Magnetic Suspension System with Permanent Magnet Motion Control[J].Fourth Interna- tional Symposium on Magnetic Bearings,1994,8:131-137.
图4 5自由度同时悬浮时的位移波形图
从实验波形图可以看出采用分散控制能够使 5 个自由度同时悬浮,从波形的平滑程度看,本系统
的悬浮效果还是不错的。转子稳定悬浮后盘式电机 开始工作,使转子转动起来。关于转子的转动将另 文讨论。
5 结论
本文针对一种新型的薄圆盘形转子 5 自由度磁 悬浮轴承结构和整个系统模型进行了具体的研究, 这种结构的磁悬浮轴承和以往的轴类磁悬浮轴承相 比有很大的不同,这种结构的磁悬浮轴承轴向可以 做得很短,适合一些轴向空间小的场合使用。
此系统轴向 3 个自由度(沿 z 轴的移动和绕 x、 y 轴的转动)用 3 个轴向磁悬浮轴承控制,采用 3 点 确定一个平面的原理使圆盘能够工作在一个平面 上;用一个径向磁悬浮轴承控制圆盘在径向 2 个自 由度(沿 x、y 轴)的移动,只有绕 z 轴转动的自由 度不施加控制,这样 5 个自由度的磁悬浮轴承同时 工作使薄圆盘形转子悬浮起来。转子稳定悬浮后盘 式电机开始工作,使转子转动起来。
[3] 王金刚,宫宵霖,杨锡劢等.基于VxWorks嵌入式实时系统 设计[M].北京:清华大学出版社,2004.
五自由度磁悬浮电机的数字控制系统_陆钰珊
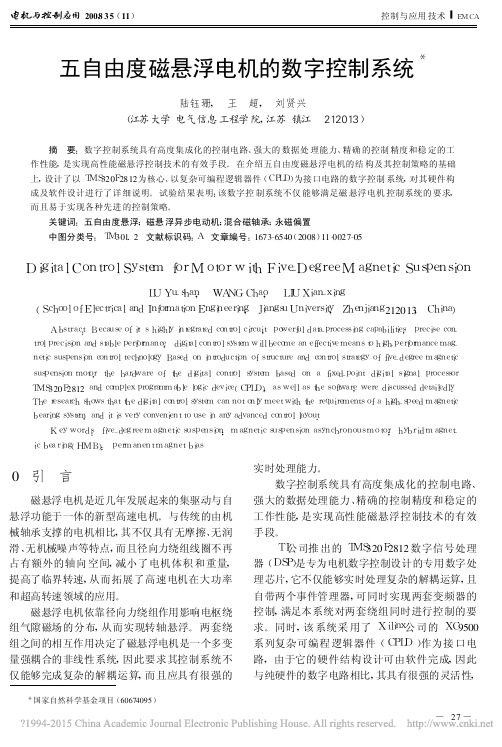
图 2 五自 由度磁悬浮电机数字控制系统结构示意图
从图 2可看出 , 该数字控制系统的硬件部分 包括 TMS320F2812控制器及其仿真器一套 、两自 由度磁悬浮异步电动机 、三自由度永磁偏置径向 轴向混合磁轴承 、径向力绕组功率驱动板 、电枢绕 组功率驱动板 、混合磁轴承功率驱动板 、电涡流位 移传感器 、光电编码器 、PC机等 。 3.1 功率驱动板介绍
控制器的输出控制信号中有 2组 6路可编程 的带死区控制的 PWM脉冲信号 , 分别控制径向 力绕组功率驱动板和电枢绕组功率驱动板上的变 频器 。 另外 , 混合磁轴承功率放大器所需要的 6 路 PWM控制信号 , 由通用 I/O接口产生 。
4 软件设计
该控制系统的软件流程图如图 3所示 。主程 序完成有关寄存器 、中断设定等初始化程序工作 , 打开定时器 , 并执行循环等待程序 , 等待中断事件 发生 。 中断事件发生时 DSP响应中断事件 , 中断 子程序执行完毕后 , 中断返回 , 程序继续进入循环 等待状态 。
2 控制策略
从磁悬浮电机的结构可知 , 两自由度磁悬浮 异步电动机和三自由度永磁偏置径向 -轴向混合 磁轴承是两个相对独立的系统 , 这就为数字控制 提供了方便 , 可以单独控制 , 且研究已表明 :如果 能在线辩识电枢绕组气隙磁场的幅值和相位 , 那 么电枢绕组和径向力绕组之间就可以不再需要传 递任何信息 , 从而实现磁悬浮异步电动机电枢绕
关键词 :五自由度悬浮 ;磁悬 浮异步电动机 ;混合磁轴承 ;永磁偏置 中图分类号 :TM301.2 文献标识码 :A 文章编号 :1673-6540(2008)11-0027-05
DigitalControlSystem forMotorwithFive-DegreeMagneticSuspension
五自由度磁悬浮轴承工作

五自由度磁悬浮轴承工作在现代工业生产中,轴承是非常重要的零部件,因为它们在各种传动系统中的作用和功能非常大。
而现代工艺的磁悬浮轴承则是解决传统轴承带来的不便和限制而被广泛采用的一种新型轴承,它拥有更高的旋转速度、更小的功耗、更可靠的运转以及更长的寿命。
那么下面我们来说一说关于磁悬浮轴承的五自由度工作原理。
1、极体定位系统轴承固定在机器的主轴上,然后在轴承座中央添加磁铁,以形成磁场。
然后机器上方的控制器会对这些磁场进行检测和定位,以便控制运转。
这种定位系统可以通过超声波和光纤传感器来实现,这些高精度的传感器可以轻松地检测轴承与机器之间的距离、速度和角度。
2、稳定性控制为了保持轴承与机器之间的距离和稳定性,我们需要一种反馈机制。
这个机制是通过检测控制电流和磁场的力矩来实现的。
控制器使用这些信息来调整电流和磁场,以保持轴承与机器之间的距离不发生变化。
3、旋转方向控制磁悬浮轴承可以进行高速旋转,但为了控制它的旋转方向,需要一个力矩控制系统。
这个系统也是通过检测磁场的力矩来实现的。
一旦检测到力矩的变化,控制器会自动调整电流和磁场,使轴承保持稳定。
4、轴向控制轴向控制是为了保证轴承沿轴线的准确位置移动,这是通过调整磁极的位置来实现的。
这里需要高精度的运动控制系统来检测轴承的位置和速度,并反馈给控制器进行控制。
5、自适应控制最后一个自由度是自适应控制。
磁悬浮轴承是一种非线性系统,它的性能随环境、物理参数的不同而变化,所以需要一个自适应控制算法来对其进行稳定控制。
这个算法可以根据运行期间检测到的数据对控制算法进行调整,以获得更好的控制精度和效率。
在这五个自由度的控制下,磁悬浮轴承可以以高速和精度运行,解决了传统轴承的不便和限制,这不仅提高了生产效率,也为未来智能制造提供了有力支持。
磁悬浮轴承多自由度转子系统的协同控制建模与仿真研究

磁悬浮轴承多自由度转子系统的协同控制建
模与仿真研究
磁悬浮轴承多自由度转子系统的协同控制建模与仿真研究
随着现代高科技的不断发展,磁悬浮轴承技术得到了广泛应用,
其中多自由度转子系统更是重要应用领域之一,能够有效提高机械设
备的精度和稳定性。
然而,多自由度转子系统由于结构复杂,难度较大,需要采用协同控制的方法进行研究。
首先,对磁悬浮轴承多自由度转子系统进行建模是必要的。
建模
过程中,先要对磁轴承进行建模和分析,获得磁场及其受力情况;再
根据转子的材料和结构特性对其建模,最后将磁轴承和转子系统进行
集成,建立完整的多自由度转子系统模型。
其次,针对该模型进行协同控制研究。
协同控制是指多控制器对
同一被控对象进行控制,实现多种控制目标。
多自由度转子系统中,
需要进行稳定控制和精度控制。
稳定控制主要通过均衡磁轴承和转子
的受力,提高系统整体稳定性;而精度控制则需要通过控制转子在空
间中的位置和方向,实现精准转动。
最后,进行仿真研究是验证该协同控制模型的有效性的重要方法。
仿真过程中,可以利用MATLAB等仿真软件进行模型验证和实验数据的
收集与分析。
通过仿真研究,可以有效掌握多自由度转子系统的运行
规律,并测试控制算法的有效性和实用性,从而为实际的工程应用提
供有力支撑。
总之,磁悬浮轴承多自由度转子系统的协同控制建模与仿真研究
是一个比较复杂的过程,但是却具有非常重要的现实意义。
该技术的
发展将有效解决现代科技发展面临的挑战,助力机械工程领域的发展。
五自由度磁悬浮轴承系统试验台设计及试验验证

五自由度磁悬浮轴承系统试验台设计及试验验证高平;杨芳芳;吕建超;卿华【摘要】为探索和研究磁悬浮轴承在多电发动机中的应用技术,以多电发动机为基础,完成了五自由度磁悬浮轴承系统试验台的设计.采用有限元分析软件对磁悬浮轴承和模拟转子进行了仿真分析,并完成了带柔性转子的磁悬浮轴承系统的性能试验.结果表明:模拟转子能较好地模拟多电发动机转子,五自由度磁悬浮轴承试验台的转速、承载力及控制系统稳定性均满足试验台的设计指标要求,可为后续多电发动机的支撑结构设计提供技术支持.【期刊名称】《燃气涡轮试验与研究》【年(卷),期】2018(031)003【总页数】5页(P58-62)【关键词】多电发动机;五自由度磁悬浮轴承;无润滑;模拟转子;试验台;性能试验【作者】高平;杨芳芳;吕建超;卿华【作者单位】中国航发四川燃气涡轮研究院,成都610500;中国航发四川燃气涡轮研究院,成都610500;中国航发四川燃气涡轮研究院,成都610500;中国航发四川燃气涡轮研究院,成都610500【正文语种】中文【中图分类】V233.4+51 引言多电发动机是在航空发动机上用磁悬浮轴承取代传统的滚动轴承,用集成在发动机主轴上的起动发电机给发动机和飞机以及机载高能激光武器提供所需能源,并用电气化传动附件取代机械式传动附件,实现发动机和飞机的全电气化传动[1]。
磁悬浮轴承技术作为多电发动机的一项核心关键技术,国外学者和研究机构对磁悬浮轴承在航空发动机上的应用开展了大量研究。
Iannello等[2-3]采用电容位移传感器,对磁悬浮轴承的线圈和传感器进行了冗余设计,提高了磁悬浮轴承系统的可靠性;Meeks等[4]采用永磁和电磁混合的磁悬浮轴承方案降低了磁悬浮轴承系统的质量;Storace[5]、Lyons[6]等采用无传感器检测技术和磁悬浮轴承冗余设计技术,完成了双转子发动机的支撑结构设计。
国内对磁悬浮轴承在航空发动机上的应用研究开展相对较晚。
全永磁悬浮轴承的单元结构分析与设计基础

全永磁悬浮轴承的单元结构分析与设计基础*摘要:永磁体在电磁轴承中的应用越来越广泛。
为了减轻电磁轴承的重量,永磁体从开始的偏置到目前的独立支承,已经开始展示其在这一领域内的优越性。
但是,完全依靠永磁体实现转子的5自由度悬浮仍然是一个难点。
本文从永磁体构建的基本支承(轴承)单元分析出发,提出了建立全永磁悬浮结构的可能性及几种方案,并扼要地介绍了采用有限元的方法对这些基本单元的性状进行分析的过程,结果显示了这一构思的可用性,为今后发展这一技术提供了基础和借鉴。
关键词:全永磁悬浮;基本单元结构;有限元分析;设计基础Analysis and Design Foundation onStructure Units of Entire PermanentMagnetic BearingAbstract: The permanent magnet is more and more widespread in electromagnetism bearing application. In order to reduce the electromagnetism bearing the weight, the permanent magnet from the bias which started to the present independent supporting, already started to demonstrate it in this domain superiority. But, depended upon the permanent magnet to realize the rotor 5 degrees of freedom aerosol still was completely a difficulty. This article (bearing) the unit analysis embarked from the permanent magnet construction basic supporting, proposed established the entire permanent magnetism aerosol structure the possibility and several kind of plans, and succinctly introduced used the finite element the method to carry on the analysis to these basic unit character the process, finally had demonstrated this idea usability, for will develop this technology to provide the foundation and the model from now on.Key words: entire permanent magnetism aerosol;basic cellular construction;finite element analysis;design foundation0 引言电磁轴承及其应用的广泛性早已是众所周知的事情。
五自由度磁悬浮轴承系统试验台设计及试验验证
五自由度磁悬浮轴承系统试验台设计及试验验证
高平;杨芳芳;吕建超;卿华
【期刊名称】《燃气涡轮试验与研究》
【年(卷),期】2018(031)003
【摘要】为探索和研究磁悬浮轴承在多电发动机中的应用技术,以多电发动机为基础,完成了五自由度磁悬浮轴承系统试验台的设计.采用有限元分析软件对磁悬浮轴承和模拟转子进行了仿真分析,并完成了带柔性转子的磁悬浮轴承系统的性能试验.结果表明:模拟转子能较好地模拟多电发动机转子,五自由度磁悬浮轴承试验台的转速、承载力及控制系统稳定性均满足试验台的设计指标要求,可为后续多电发动机的支撑结构设计提供技术支持.
【总页数】5页(P58-62)
【作者】高平;杨芳芳;吕建超;卿华
【作者单位】中国航发四川燃气涡轮研究院,成都610500;中国航发四川燃气涡轮研究院,成都610500;中国航发四川燃气涡轮研究院,成都610500;中国航发四川燃气涡轮研究院,成都610500
【正文语种】中文
【中图分类】V233.4+5
【相关文献】
1.解决五自由度磁悬浮轴承耦合效应的试验研究 [J], 杨韶;曾庆万
2.直流无刷电机再生制动系统试验台的设计与验证 [J], 隋妮;王广萍;李仲兴;张德
望;顾剑波
3.五自由度磁悬浮轴承控制系统的研制 [J], 刘晓军;刘小英;胡业发;柴苍修
4.五自由度气浮仿真试验台气动回路设计 [J], 许剑;任迪;杨庆俊;杨相军
5.一种五自由度磁悬浮轴承系统的零功耗策略研究 [J], 蒋汝根;赵旭升
因版权原因,仅展示原文概要,查看原文内容请购买。
五自由度磁悬浮开关磁阻电机系统的设计与实现
( N a n j i n g C o l l e g e o f C h e m i c a l T e c h n o l o g y , N a n j i n g 2 1 0 0 4 8 , C h i n a )
ma g n e t b i a s e d a x i a l — r a d i a l ma g n e t i c b e a r i n g s w a s p r o p o s e d .T h e p a r a me t e r s d e s i g n o n t h e s w i t c h e d r e l u c t a n c e ma c h i n e a n d
Ab s t r a c t : A i f v e d e g r e e s r f e e d o m ma g n e t i c s u s p e n d e d s wi t c h e d r e l u c t a n c e ma c h i n e w a s d e s i g n e d .B a s e d o n t h e a n a l y — s i s o f s e v e r a l s u s p e n s i o n s t r u c t u r e s t y l e s .a n e w s c h e me o f i f v e d e re g e s re f e d o m s u s p e n s i o n wi t h t w o u n i f o r m p e ma r n e n t
五自由度磁悬浮电主轴的结构设计与仿真

五自由度磁悬浮电主轴的结构设计与仿真陈瑞;刘贤兴【期刊名称】《电机与控制应用》【年(卷),期】2011(38)11【摘要】Based on the traditional structure of five freedom degree magnetic bearings electric spindle, the two parts of five freedom degree magnetic bearings electric spindle were introduced, which were three freedom degree permanent magnet bias mixed magnetic bearings and two freedom degree magnetic bearings asynchronous motor. Firstly, the prototype of five freedom degree magnetic bearings electric spindle was designed, and then the magnetic force and levitation force by electromagnetic analysis software Asoft/Maxwell was analyzed, thus verifying the structure and parameter rationality of the prototype. Finally, the simulation model of control system in Matlab/Simulink was constructed and some related simulation was did, which lays foundation for establishing the control system of the magnetic bearings electric spindle.%在传统五自由度磁悬浮电主轴结构的基础上,提出了一种由永磁偏置三自由度混合磁轴承和二自由度磁悬浮异步电机构成的五自由度磁悬浮电主轴结构.设计了五自由度磁悬浮电主轴的试验样机,通过电磁场分析软件Asoft/Maxwell分析了样机的磁场和悬浮力,验证了所设计样机结构和参数的合理性.在MATLAB/Simulink环境下构建了控制系统的仿真模型,进行了相关的仿真研究,为磁悬浮电主轴数字控制系统的建立奠定了基础.【总页数】6页(P1-5,15)【作者】陈瑞;刘贤兴【作者单位】江苏大学电气信息工程学院,江苏镇江212013;江苏大学电气信息工程学院,江苏镇江212013【正文语种】中文【中图分类】TM302【相关文献】1.水润滑高速电主轴轴承零泄漏密封结构设计与仿真分析 [J], 杨霞;任洁琦2.离心式磁悬浮血泵用混合磁悬浮支承设计与仿真 [J], 吴华春;王志强;龚高;胡业发3.五自由度磁悬浮电主轴结构与有限元分析 [J], 刘贤兴;吴莹4.位移传感器在磁悬浮电主轴中安装结构的改进 [J], 边忠国;刘淑琴5.五自由度气-水润滑高速电主轴的动态特性识别 [J], 蒋红琰;傅云龙;陈守豪;胡志胜因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
p r f v r e o d ge g ei e rn see ti s i de w r t d c d,whc r h e r e o d g e e — a t o e f d m e r e ma n t b a g l cr p n l e e i r u e s f i e c i c n o ih we et r efe d m e ep r r ma e tma n tb a x d ma n t e r g n w r e o d g e g e i b a i g s n h o o smo o .F r t n n g e is mie g e i b a i sa d t o fe d m e r e ma n t e r sa y c rn u tr i l c n c n s y, t e p oo y e o v re o d g e g ei e r g lcrc s i d ewa e in d,a d t e ema n t o c n h r tt p ff efe d m e r e ma n t b a n see t p n l sd sg e i c i i n h n t g ei f r ea d h c l vtt n fr e b lcr ma n t n lss s f a e As f Ma welw sa ay e e i i o c y ee t ao o g ei a ay i o t r o t c w / x l a n l z d,t u e i i gt e sr c u e a d p — h sv r yn h t t r n a f u r mee ain lt f h r tt p .F n l ,t e smu ai n mo e fc n rls se i t b S mu i k w sc n t c a trrt ai o e p oo y e i al o y t y h i l t d lo o t y t m Mal / i l a o s o o n a n u r — t d a d s me r lt d smu ai n w s d d,w ih l y o n a in f r e tb ih n h o to y t m ft e ma n t e n o ea e i lt a i o h c a s fu d t o sa l i g te c n rl s se o h g ei o s c
S r c ur lDe i n n i u a i n Ana y i f Fi e Fr e o g e t u t a s g a d S m l to l ss o v e d m De r e
M a ne i a i g e ti i l g tc Be rn sElc rc Sp nd e
MA L B S l k环境 下构建了控制系统 的仿真模 型 , T A /i i mu n 进行 了相关 的仿真研究 , 为磁 悬浮 电主轴数 字控制 系 统 的建立奠定 了基础 。 关键词 :电主轴 ; 磁悬浮异步 电机 ; 混合磁轴承 ;有限元分析
中 图分 类 号 : M 3 2 文 献标 志 码 : 文 章 编 号 :6 36 4 (0 1 l-0 10 T 0 A 17 -50 2 1 ) 1 0 -5 0
be rng lc rc s i l . a i s ee t pnd e i Key wor ds:ee t i pi l be rngls ot lc rc s nd e; a i e s m or; h ybrd ag tc be i i m ne arng;fnie e e e nayss i i t lm nt a l i
Absr t tac :Ba e n t r di o a tucur ffv r e m g e g ei a i g l crc s nde,t wo s d o he ta t n lsr t e o e fe do de e ma n tc be rn s ee ti pi l i i r he t
自由度磁悬 浮异步 电机构成 的五 自由度 磁悬 浮电主轴结构 。设计 了五 自由度磁悬浮 电主轴 的试验样机 , 通过
电磁 场 分 析 软Байду номын сангаас件 A otMaw l分 析 了 样 机 的 磁 场 和 悬 浮 力 , 证 了 所 设 计 样 机 结 构 和 参 数 的 合 理 性 。 在 sf x e / 1 验
电 扎 与才 制 应 闭 2 1, (I 望 01 8 I ) 3
研究与设 汁 E C MA
五 自 由度 磁 悬 浮 电 主 轴 的 结 构 设 计 与 仿 真 术
陈 瑞 , 刘 贤兴 22 1 ) 1 0 3 ( 苏大 学 电气信 息 工程 学 院 , 苏 镇 江 江 江
摘
要: 在传统 五 自由度磁悬浮 电主轴结构 的基础上 , 出了一种 由永磁偏置三 自由度混合 磁轴承 和二 提
CHEN i Ru . L U a x n l Xi n。 ig
( ol eo l tcl n no t nE gn eig J n s nvr t, h ni g2 2 1 , hn ) C l g f e r a adIf mai n ier , i guU i sy Z ej n 10 3 C ia e E ci r o n a ei a