温度变送器中英文对照外文翻译文献
化工行业常用仪器仪表中英文翻译汇总
化工行业常用仪器仪表中英文翻译汇总1.Pressure Gauge 压力表2.Differential Gauge 差压表3.Pressure Switch 压力开关4.Temperature 温度5.Thermometer 温度计6.Thermocouple 热电偶7.RTD 热电阻8.Temperature Switch 温度开关9.Temperature Transmitter 温度变送器10.Pressure 压力11.Pressure Transmitter 压力变送器12.Rotameter 转子流量计13.Turbine Flowmeter 涡轮流量计14.Vortex Flowmeter 旋涡流量计15.Electromagnetic Flowmeter电磁流量计16.Annubar Flowmeter 阿牛巴流量计17.Mass Flowmeter 质量流量计18.Analyzer 分析仪表19.Chromatograph 色谱仪20.Analyzer Infrared 红外线分析仪21.Oxygen Analyser 氧气分析仪22.Mass Spectrometer 质谱分析仪23.UV Analyser 紫外线分析仪24.Flame Ionisation Detector 光离子探测器25.Ph-meter 酸碱计26.Differential Transmitter 差压变送器27.Level 液位28.Glass Gauge 玻璃板液位计29.Magnetic Level 磁浮子液位计30.Radar Level 雷达液位计31.Ultrasonic Level 超声波液位计32.Fibre Level 光纤液位计33.Internal or External Torque Tube 浮筒液位计34.Radioactive Level 放射性液位计35.Level Switch 液位开关36.Level Transmitter 液位变送器37.Flow 流量38.Conductivity-meter 电导仪39.Densimeter 密度计40.Moisture-meter 湿度计41.Valve 阀42.Positioner 阀门定位器43.Global Valve 截止阀44.Gate Valve 闸阀45.Safety Valve 安全阀46.Reducing Valve 减压阀47.Butterfly Valve 蝶阀48.Ball Valve 球阀49.Check Valve 单向阀50.Solenoid Valve 电磁阀51.Throttle Valve 节流阀52.Control Valve 控制阀53.Shutdown Valve 切断阀54.Materials施工材料55.Impulse Tube 导压管56.Copper Piping for Air Supply 气源铜管57.Heat Tracing Piping 伴热管58.Galvanised Carbon Steel Piping 镀锌碳钢管59.Stainless Steel Piping 不锈钢管60.Control Panel/Board/Cabinet 控制盘/板/柜61.Local Panel 就地盘62.Recorder 记录仪63.Controller 调节器64.Angle Iron 角铁65.Channel Iron 槽钢66.Trench 汇线槽67.Cable Tray 桥架68.Cable 电缆69.Console 控制台70.Operator Station 操作站71.Connection Cabinet 接线柜72.Relay 继电器73.Terminal Strips 端子排74.Intrinsically Safe Barrier 安全栅75.Junction Box 接线盒76.Conduit 穿线管77.Connector 接头78.ControlRoom 控制室79.Distributed Control System(DCS) 集散控制系统。
单片机温度控制英文文献及翻译(适用于毕业论文外文翻译+中英文对照)

Temperature Control Using a Microcontroller:An Interdisciplinary Undergraduate Engineering Design ProjectJames S. McDonaldDepartment of Engineering ScienceTrinity UniversitySan Antonio, TX 78212AbstractThis paper describes an interdisciplinary d esign project which was done under the author’s supervision by a group of four senior students in the Department of Engineering Science at Trinity University. The objective of the project was to develop a temperature control system for an air-filled chamber. The system was to allow entry of a desired chamber temperature in a prescribed range and to exhibit overshoot and steady-state temperature error of less than 1 degree Kelvin in the actual chamber temperature step response. The details of the design developed by this group of students, based on a Motorola MC68HC05 family microcontroller, are described. The pedagogical value of the problem is also discussed through a description of some of the key steps in the design process. It is shown that the solution requires broad knowledge drawn from several engineering disciplines including electrical, mechanical, and control systems engineering.1 IntroductionThe design project which is the subject of this paper originated from a real-world application.A prototype of a microscope slide dryer had been developed around an OmegaTM modelCN-390 temperature controller, and the objective was to develop a custom temperature control system to replace the Omega system. The motivation was that a custom controller targeted specifically for the application should be able to achieve the same functionality at a much lower cost, as the Omega system is unnecessarily versatile and equipped to handle a wide variety of applications.The mechanical layout of the slide dryer prototype is shown in Figure 1. The main element of the dryer is a large, insulated, air-filled chamber in which microscope slides, each with a tissue sample encased in paraffin, can be set on caddies. In order that the paraffin maintain the proper consistency, the temperature in the slide chamber must be maintained at a desired (constant) temperature. A second chamber (the electronics enclosure) houses a resistive heater and the temperature controller, and a fan mounted on the end of the dryer blows air across theheater, carrying heat into the slide chamber. This design project was carried out during academic year 1996–97 by four students under the author’s supervision as a Senior Design project in the Department of Engineering Science at Trinity University. The purpose of this paper isto describe the problem and the students’ solution in some detail, and to discuss some of the pedagogical opportunities offered by an interdisciplinary design project of this type. The students’ own report was presented at the 1997 National Conference on Undergraduate Research [1]. Section 2 gives a more detailed statement of the problem, including performance specifications, and Section 3 describes the students’ design. Section 4 makes up the bulk of the paper, and discusses in some detail several aspects of the design process which offer unique pedagogical opportunities. Finally, Section 5 offers some conclusions.2 Problem StatementThe basic idea of the project is to replace the relevant parts of the functionality of an Omega CN-390 temperature controller using a custom-designed system. The application dictates that temperature settings are usually kept constant for long periods of time, but it’s nonetheless important that step changes be tracked in a “reasonable” manner. Thus the main requirements boil down to·allowing a chamber temperature set-point to be entered,·displaying both set-point and actual temperatures, and·tracking step changes in set-point temperature with acceptable rise time, steady-state error, and overshoot.Although not explicitly a part of the specifications in Table 1, it was clear that the customer desired digital displays of set-point and actual temperatures, and that set-point temperature entry should be digital as well (as opposed to, say, through a potentiometer setting).3 System DesignThe requirements for digital temperature displays and setpoint entry alone are enough to dictate that a microcontrollerbased design is likely the most appropriate. Figure 2 shows a block diagram of the students’ desig n.The microcontroller, a MotorolaMC68HC705B16 (6805 for short), is the heart of the system. It accepts inputs from a simple four-key keypad which allow specification of the set-point temperature, and it displays both set-point and measured chamber temperatures using two-digit seven-segment LED displays controlled by a display driver. All these inputs and outputs are accommodated by parallel ports on the 6805. Chamber temperature is sensed using apre-calibrated thermistor and input via one of the 6805’s analog-to-digital inputs. Finally, a pulse-width modulation (PWM) output on the 6805 is used to drive a relay which switches line power to the resistive heater off and on.Figure 3 shows a more detailed schematic of the electronics and their interfacing to the 6805. The keypad, a Storm 3K041103, has four keys which are interfaced to pins PA0{ PA3 of Port A, configured as inputs. One key functions as a mode switch. Two modes are supported: set mode and run mode. In set mode two of the other keys are used to specify the set-point temperature: one increments it and one decrements. The fourth key is unused at present. The LED displays are driven by a Harris Semiconductor ICM7212 display driver interfaced to pins PB0{PB6 of Port B, configured as outputs. The temperature-sensing thermistor drives, through a voltage divider, pin AN0 (one of eight analog inputs). Finally, pin PLMA (one of two PWM outputs) drives the heater relay.Software on the 6805 implements the temperature control algorithm, maintains the temperature displays, and alters the set-point in response to keypad inputs. Because it is not complete at this writing, software will not be discussed in detail in this paper. The control algorithm in particular has not been determined, but it is likely to be a simple proportional controller and certainly not more complex than a PID. Some control design issues will be discussed in Section 4, however.4 The Design ProcessAlthough essentially the project is just to build a thermostat, it presents many nice pedagogical opportunities. The knowledge and experience base of a senior engineering undergraduate are just enough to bring him or her to the brink of a solution to various aspects of the problem. Yet, in each case, realworld considerations complicate the situation significantly.Fortunately these complications are not insurmountable, and the result is a very beneficial design experience. The remainder of this section looks at a few aspects of the problem which present the type of learning opportunity just described. Section 4.1 discusses some of the features of a simplified mathematical model of the thermal properties of the system and how it can beeasily validated experimentally. Section 4.2 describes how realistic control algorithm designs can be arrived at using introductory concepts in control design. Section 4.3 points out some important deficiencies of such a simplified modeling/control design process and how they can be overcome through simulation. Finally, Section 4.4 gives an overview of some of the microcontroller-related design issues which arise and learning opportunities offered.4.1 MathematicalModelLumped-element thermal systems are described in almost any introductory linear control systems text, and just this sort of model is applicable to the slide dryer problem. Figure 4 shows a second-order lumped-element thermal model of the slide dryer. The state variables are the temperatures Ta of the air in the box and Tb of the box itself. The inputs to the system are the power output q(t) of the heater and the ambient temperature T¥. ma and mb are the masses of the air and the box, respectively, and Ca and Cb their specific heats. μ1 and μ2 are heat transfer coefficients from the air to the box and from the box to the external world, respectively.It’s not hard to show that the (linearized) state equationscorresponding to Figure 4 areTaking Laplace transforms of (1) and (2) and solving for Ta(s), which is the output of interest, gives the following open-loop model of the thermal system:where K is a constant and D(s) is a second-order polynomial.K, tz, and the coefficients ofD(s) are functions of the variousparameters appearing in (1) and (2).Of course the various parameters in (1) and (2) are completely unknown, but it’s not hard to show that, regardless of their values, D(s) has two real zeros. Therefore the main transfer function of interest (which isthe one from Q(s), since we’ll assume constant ambient temperature) can be writtenMoreover, it’s not too hard to show that 1=tp1 <1=tz <1=tp2, i.e., that the zero lies between the two poles. Both of these are excellent exercises for the student, and the result is the openloop pole-zero diagram of Figure 5.Obtaining a complete thermal model, then, is reduced to identifying the constant K and the three unknown time constants in (3). Four unknown parameters is quite a few, but simple experiments show that 1=tp1 _ 1=tz;1=tp2 so that tz;tp2 _ 0 are good approximations. Thus the open-loop system is essentially first-order and can therefore be written(where the subscript p1 has been dropped).Simple open-loop step response experiments show that,for a wide range of initial temperatures and heat inputs, K _0:14 _=W and t _ 295 s.14.2 Control System DesignUsing the first-order model of (4) for the open-loop transfer function Gaq(s) and assuming for the moment that linear control of the heater power output q(t) is possible, the block diagram of Figure 6 represents the closed-loop system. Td(s) is the desired, or set-point, temperature,C(s) is the compensator transfer function, and Q(s) is the heater output in watts.Given this simple situation, introductory linear control design tools such as the root locus method can be used to arrive at a C(s) which meets the step response requirements on rise time, steady-state error, and overshoot specified in Table 1. The upshot, of course, is that a proportional controller with sufficient gain can meet all specifications. Overshoot is impossible, and increasing gains decreases both steady-state error and rise time.Unfortunately, sufficient gain to meet the specifications may require larger heat outputs than the heater is capable of producing. This was indeed the case for this system, and the result is that the rise time specification cannot be met. It is quite revealing to the student how useful such an oversimplified model, carefully arrived at, can be in determining overall performance limitations.4.3 Simulation ModelGross performance and its limitations can be determined using the simplified model of Figure 6, but there are a number of other aspects of the closed-loop system whose effects on performance are not so simply modeled. Chief among these are·quantization error in analog-to-digital conversion of the measured temperature and· the use of PWM to control the heater.Both of these are nonlinear and time-varying effects, and the only practical way to study them is through simulation (or experiment, of course).Figure 7 shows a SimulinkTM block diagram of the closed-loop system which incorporates these effects. A/D converter quantization and saturation are modeled using standard Simulink quantizer and saturation blocks. Modeling PWM is more complicated and requires a customS-function to represent it.This simulation model has proven particularly useful in gauging the effects of varying thebasic PWM parameters and hence selecting them appropriately. (I.e., the longer the period, the larger the temperature error PWM introduces. On the other hand, a long period is desirable to avoid excessive relay “chatter,” among other things.) PWM is often difficult for students to grasp, and the simulation model allows an exploration of its operation and effects which is quite revealing.4.4 The MicrocontrollerSimple closed-loop control, keypad reading, and display control are some of the classic applications of microcontrollers, and this project incorporates all three. It is therefore an excellent all-around exercise in microcontroller applications. In addition, because the project isto produce an actual packaged prototype, it won’t do to use a simple evaluation board with theI/O pins jumpered to the target system. Instead, it’s necessary to develop a complete embedded application. This entails the choice of an appropriate part from the broad range offered in a typical microcontroller family and learning to use a fairly sophisticated development environment. Finally, a custom printed-circuit board for the microcontroller and peripherals must be designed and fabricated.Microcontroller Selection. In view of existing local expertise, the Motorola line of microcontrollers was chosen for this project. Still, this does not narrow the choice down much. A fairly disciplined study of system requirements is necessary to specify which microcontroller, out of scores of variants, is required for the job. This is difficult for students, as they generally lack the experience and intuition needed as well as the perseverance to wade through manufacturers’ selection guides.Part of the problem is in choosing methods for interfacing the various peripherals (e.g., what kind of display driver should be used?). A study of relevant Motorola application notes [2, 3, 4] proved very helpful in understandingwhat basic approaches are available, and what microcontroller/peripheral combinations should be considered.The MC68HC705B16 was finally chosen on the basis of its availableA/D inputs and PWMoutputs as well as 24 digital I/O lines. In retrospect this is probably overkill, as only oneA/D channel, one PWM channel, and 11 I/O pins are actually required (see Figure 3). The decision was made to err on the safe side because a complete development system specific to the chosen part was necessary, and the project budget did not permit a second such system to be purchased should the firstprove inadequate.Microcontroller Application Development. Breadboarding of the peripheral hardware, development of microcontroller software, and final debugging and testing of a customprinted-circuit board for the microcontroller and peripherals all require a development environment of some kind. The choice of a development environment, like that of themicrocontroller itself, can be bewildering and requires some faculty expertise. Motorola makes three grades of development environment ranging from simple evaluation boards (at around $100) to full-blown real-time in-circuit emulators (at more like $7500). The middle option was chosen for this project: the MMEVS, which consists of _ a platform board (which supports all 6805-family parts), _ an emulator module (specific to B-series parts), and _ a cable and target head adapter (package-specific). Overall, the system costs about $900 and provides, with some limitations, in-circuit emulation capability. It also comes with the simple but sufficient software development environment RAPID [5].Students find learning to use this type of system challenging, but the experience they gain in real-world microcontroller application development greatly exceeds the typical first-course experience using simple evaluation boards.Printed-Circuit Board. The layout of a simple (though definitely not trivial) printed-circuit board is another practical learning opportunity presented by this project. The final board layout, with package outlines, is shown (at 50% of actual size) in Figure 8. The relative simplicity of the circuit makes manual placement and routing practical—in fact, it likely gives better results than automatic in an application like this—and the student is therefore exposed to fundamental issues of printed-circuit layout and basic design rules. The layout software used was the very nice package pcb,2 and the board was fabricated in-house with the aid of our staff electronics technician.5 ConclusionThe aim of this paper has been to describe an interdisciplinary, undergraduate engineering design project: a microcontroller- based temperature control system with digital set-point entry and set-point/actual temperature display. A particular design of such a system has been described, and a number of design issues which arise—from a variety of engineering disciplines—have been discussed. Resolution of these issues generally requires knowledge beyond that acquired in introductory courses, but realistically accessible to advance undergraduate students, especiallywith the advice and supervision of faculty.Desirable features of the problem, from a pedagogical viewpoint, include the use of a microcontroller with simple peripherals, the opportunity to usefully apply introductorylevel modeling of physical systems and design of closed-loop controls, and the need for relatively simple experimentation (for model validation) and simulation (for detailed performance prediction). Also desirable are some of the technologyrelated aspects of the problem including practical use of resistive heaters and temperature sensors (requiring knowledge of PWM and calibration techniques, respectively), microcontroller selection and use of development systems, and printedcircuit design.AcknowledgementsThe author would like to acknowledge the hard work, dedication, and ability shown by the students involved in this project: Mark Langsdorf, Matt Rall, PamRinehart, and David Schuchmann. It is their project, and credit for its success belongs to them.References[1] M. Langsdorf, M. Rall, D. Schuchmann, and P. Rinehart,“Temperature control of a microscope slide dryer,” in1997 National Conference on Undergraduate Research,(Austin, TX), April 1997. Poster presentation.[2] Motorola, Inc., Phoenix, AZ, Temperature Measurementand Display Using the MC68HC05B4 and the MC14489,1990. Motorola SemiconductorApplicationNote AN431.[3] Motorola, Inc., Phoenix, AZ, HC05 MCU LED DriveTechniques Using the MC68HC705J1A, 1995. MotorolaSemiconductor Application Note AN1238.[4] Motorola, Inc., Phoenix, AZ, HC05MCU Keypad DecodingTechniques Using the MC68HC705J1A, 1995. MotorolaSemiconductor Application Note AN1239.[5] Motorola, Inc., Phoenix, AZ, RAPID Integrated DevelopmentEnvironment User’s Manual, 1993. (RAPID wasdeveloped by P & E Microcomputer Systems, Inc.).单片机温度控制:一个跨学科的本科生工程设计项目JamesS.McDonald工程科学系三一大学德克萨斯州圣安东尼奥市78212摘要本文所描述的是作者领导由四个三一大学高年级学生组成的团队进行的一个跨学科工程项目的设计。
罗斯蒙特248温度变送器选型中文样本

! rms
/ !" 50/60 Hz 707V dc
500 V ac
!"#$ !"#$%&'()*+,-. !"# NAMUR NAMUR ! NE 43 !" NAMUR !"#$%& ! 1 NAMUR NE43 1 ! 3.9 I 20.5 3.8 I 20.5 21 I 23 ! 21 I 23 I 3.75 I 3.6
!"#$%&'(
!"#$
!"#$% & Noryl? !" !" U !"#$ 0-99%
!?
!" A
!
O BUZ !
NAMUR
248 !" NAMUR ! NE 21 !"(EMC) !"#$%&'( NE 43 !"#$%&'(#)*+ NE 89 !"#$%&'()*+,
!N !" B
O
!
!"#$ 470 !"#$% !"# !"#$%&'()*+(,-./012 !" 470 !"# !" 00813-0100-4191
!"#$
!"#$% 1000
3 DIN
1/2
NPT
!"#$% 100 K NiCr NiAl -40
!"
+ ! 600 1000 !
!" 0
C
= 0.00385
/
/
英文参考文献原文复印件及译文

英文参考文献原文复印件及译文专业:自动化08级1班姓名:学号:080412122指导教师:赵奇完成日期年月SCM theory and the minimum MCU AdventWith the development of automation technology and microelectronics technology, as well as the fieldbus technology becomes more mature, numerical control technology in the production process is applied more and more widely, on the site of the signal collection, transmission and data processing is put forward higher requirements.Intelligent transmitter is composed of sensor and microprocessor ( computer ) and the phase structure. It makes full use of the microprocessor computing and storage capacity, the sensor data processing, including the measurement signal processing (such as filtering, amplification, A/D conversion ), data display, automatic calibration and automatic compensation.The microprocessor is the core of intelligent transmitter. It can not only carry on the data computation, storage and data processing, but also through a feedback loop to adjust to the sensor, data acquisition to achieve the best. The microprocessor has a variety of software and hardware function, so it can complete the traditional transducer difficult task. So intelligent transmitter reduces sensor manufacturing difficulty, and largely improves the performance of the sensor lord. In addition, intelligent transmitter also has the following characteristics:1 with automatic compensation ability, through the software on the sensor's nonlinear, temperature drift, drift and automatic compensation.Self diagnosis, after power for the sensor to check all parts of self, the sensor is normal, and make judgments.Data processing is convenient and accurate, according to internal procedures, automatic data processing, such as statistical processing, removal of abnormal value.2 with two-way communication function. The microprocessor can receive and process the sensor data, can also be information feedback to the sensor, thus the process of measurement adjustment and control.The information can be stored and can be stored in memory, the characteristics of sensor data, configuration information and compensation characteristics.3 has a digital interface output function, the output of the digital signal conveniently and computer or field bus connectionThe difference between the transmitter and sensorIn editing software in the process of joining the watchdog circuit. Theapplication of watchdog circuit, so that the chip can be in no condition to realize continuous work. But there are still some problems:1the watchdog circuit at run-time, meaning, system error. 2circulation process error too many times, the watchdog can not effectively resolved3 in measurement and control system in the period of time in one-chip, computer peripheral devices such as a large amount of time, is not running, waiting for orders. In these cases, the hardware watchdog is to use a timer, to monitor the main program operation, that is to say in the main program of the operatio n process, we will in time to time before the timer is reset if the dead cycle, or PC pointers can't come back. Then time to time will make chip reset.SCM is the main computer components are integrated on a single chip microcomputer. It is a collection of counting and many interfaces in one microcontroller, is widely used in intelligent products and industrial automation, and51 SCM SCM is the most typical and the most representative one.Signal generator in the teaching, testing, monitoring and other fields have a very wide range of applications, but also with the modern electronic communications technology development, often requires high precision and adjustable frequency signal generator.The design of direct use A T89C51 SCM as an important component of the wave generator, coupled with clever software design and simple external circuit, a frequency, adjustable amplitude sine wave, triangle wave, sawtooth wave and Fang Bo and other signals. Signal frequency, amplitude, through the keyboard input directly, by the LED display. And various types of existing waveform generator comparison, ATMEL AT89C51 is a highly effective micro controller, which produces a small number of signal interference, output stability, high reliability, especially the simple and convenient operation, low cost, very suitable for teaching and experimental physics laboratory use.Microchip security, SCM and technology development department vice president Steve Drehobl said:" Microchip continuously expand 8microcontroller applications, creating a new generation of ultra compact flash memory device, using PIC MCU into non-traditional applications. These6pin device with high cost-effectiveness replaces the discrete logic or mechanical function, reduces the number of components and board space, also give engineers more design flexibility.The United States of America microchip technology company ( Microchip Technology ) recently launched the world 's smallest6 pin package chip ( MCU ), thePIC microcontroller architecture powerful functions into ultra small volume of the SOT-23 package, the single chip microcomputer application domain expands further, in some space is extremely limited and cost requirements for lower application field is expected to have a brilliant future.Traditional single chip market, MCU products can be used on a number of different fields, such as home appliances to the automotive, communications, office automation and industrial control. According to market analysis firm IC Insight global MCU market data,2003total sales of $10400000000, at $12200000000 in2004. Although each main MCU suppliers have already introduced 16bit,32 bit single chip, but the market is still used in most8 bit single chip microcomputer products, accounted for the overall market of about 40%. Therefore8 bits single chip computer still has large application market, mainly in such products in the ease of use, cost advantages, while performance can meet most of the needs of applications. This Steve Drehobl said:"8 bit single chip has the advantages of easy operation and use characteristics, design staff will soon be able to master the principles and methods of using8 bit single chip microcomputer; design cycle is short, design tool is more than 16,32design tool much cheaper; third, in reality, we are more according to what kind of application can produce what kind of performance to determine how many bits MCU used. If in those using8 bit single chip can meet the needs of the application, you must use 16 bit and 32 bit, from the function, more abundant, but the cost rise. Again, the current problems should not be ignored. If the excessive use of electric current, battery power consumption is relatively large单片机理论与最小MCU问世随着自动化技术的发展和微电子技术的进步,以及现场总线技术的日益成熟,数控技术在生产过程中的应用越来越广泛,对现场信号的采集、传输和数据处理提出更高的要求。
热电偶温度传感器中英文对照外文翻译文献
中英文对照外文翻译文献(文档含英文原文和中文翻译)外文翻译:Thermocouple Temperatur sensorIntroduction to ThermocouplesThe thermocouple is one of the simplest of all sensors. It consists of two wires of dissimilar metals joined near the measurement point. The output is a small voltage measured between the two wires.While appealingly simple in concept, the theory behind the thermocouple is subtle, the basics of which need to be understood for the most effective use of the sensor.Thermocouple theoryA thermocouple circuit has at least two junctions: the measurement junction and a reference junction. Typically, the reference junction is created where the two wires connect to the measuring device. This second junction it is really two junctions: one for each of the two wires, but because they are assumed to be at the same temperature (isothermal) they are considered as one (thermal) junction. It is the point where the metals change - from the thermocouple metals to what ever metals are used in the measuring device - typically copper.The output voltage is related to the temperature difference between the measurement and the reference junctions. This is phenomena is known as the Seebeck effect. (See the Thermocouple Calculator to get a feel for the magnitude of the Seebeck voltage). The Seebeck effect generates a small voltage along the length of a wire, and is greatest where the temperature gradient is greatest. If the circuit is of wire of identical material, then they will generate identical but opposite Seebeck voltages which will cancel. However, if the wire metals are different the Seebeck voltages will be different and will not cancel.In practice the Seebeck voltage is made up of two components: the Peltiervoltage generated at the junctions, plus the Thomson voltage generated in the wires by the temperature gradient.The Peltier voltage is proportional to the temperature of each junction while the Thomson voltage is proportional to the square of the temperature difference between the two junctions. It is the Thomson voltage that accounts for most of the observed voltage and non-linearity in thermocouple response.Each thermocouple type has its characteristic Seebeck voltage curve. The curve is dependent on the metals, their purity, their homogeneity and their crystal structure. In the case of alloys, the ratio of constituents and their distribution in the wire is also important. These potential inhomogeneous characteristics of metal are why thick wire thermocouples can be more accurate in high temperature applications, when the thermocouple metals and their impurities become more mobile by diffusion.The practical considerations of thermocouplesThe above theory of thermocouple operation has important practical implications that are well worth understanding:1. A third metal may be introduced into a thermocouple circuit and have no impact, provided that both ends are at the same temperature. This means that the thermocouple measurement junction may be soldered, brazed or welded without affecting the thermocouple's calibration, as long as there is no net temperature gradient along the third metal.Further, if the measuring circuit metal (usually copper) is different to that of the thermocouple, then provided the temperature of the two connecting terminals is the same and known, the reading will not be affected by the presence of copper.2. The thermocouple's output is generated by the temperature gradient along the wires and not at the junctions as is commonly believed. Therefore it is important that the quality of the wire be maintained where temperature gradients exists. Wire quality can be compromised by contamination from its operating environment and the insulating material. For temperatures below 400°C, contamination of insulated wires is generally not a problem. At temperatures above 1000°C, the choice of insulationand sheath materials, as well as the wire thickness, become critical to the calibration stability of the thermocouple.The fact that a thermocouple's output is not generated at the junction should redirect attention to other potential problem areas.3. The voltage generated by a thermocouple is a function of the temperature difference between the measurement and reference junctions. Traditionally the reference junction was held at 0°C by an ice bath:The ice bath is now considered impractical and is replace by a reference junction compensation arrangement. This can be accomplished by measuring the reference junction temperature with an alternate temperature sensor (typically an RTD or thermistor) and applying a correcting voltage to the measured thermocouple voltage before scaling to temperature.The correction can be done electrically in hardware or mathematically in software. The software method is preferred as it is universal to all thermocouple types (provided the characteristics are known) and it allows for the correction of the small non-linearity over the reference temperature range.4. The low-level output from thermocouples (typically 50mV full scale) requires that care be taken to avoid electrical interference from motors, power cable, transformers and radio signal pickup. Twisting the thermocouple wire pair (say 1 twist per 10 cm) can greatly reduce magnetic field pickup. Using shielded cable or running wires in metal conduit can reduce electric field pickup. The measuring device should provide signal filtering, either in hardware or by software, with strong rejection of the line frequency (50/60 Hz) and its harmonics.5. The operating environment of the thermocouple needs to be considered. Exposure to oxidizing or reducing atmospheres at high temperature can significantly degrade some thermocouples. Thermocouples containing rhodium (B,R and S types) are not suitable under neutron radiation.The advantages and disadvantages of thermocouplesBecause of their physical characteristics, thermocouples are the preferred methodof temperature measurement in many applications. They can be very rugged, are immune to shock and vibration, are useful over a wide temperature range, are simple to manufactured, require no excitation power, there is no self heating and they can be made very small. No other temperature sensor provides this degree of versatility.Thermocouples are wonderful sensors to experiment with because of their robustness, wide temperature range and unique properties.On the down side, the thermocouple produces a relative low output signal that is non-linear. These characteristics require a sensitive and stable measuring device that is able provide reference junction compensation and linearization.Also the low signal level demands that a higher level of care be taken when installing to minimise potential noise sources.The measuring hardware requires good noise rejection capability. Ground loops can be a problem with non-isolated systems, unless the common mode range and rejection is adequate.Types of thermocoupleAbout 13 'standard' thermocouple types are commonly used. Eight have been given an internationally recognised letter type designators. The letter type designator refers to the emf table, not the composition of the metals - so any thermocouple that matches the emf table within the defined tolerances may receive that table's letter designator.Some of the non-recognised thermocouples may excel in particular niche applications and have gained a degree of acceptance for this reason, as well as due to effective marketing by the alloy manufacturer. Some of these have been given letter type designators by their manufacturers that have been partially accepted by industry.Each thermocouple type has characteristics that can be matched to applications. Industry generally prefers K and N types because of their suitability to high temperatures, while others often prefer the T type due to its sensitivity, low cost and ease of use.A table of standard thermocouple types is presented below. The table also showsthe temperature range for extension grade wire in brackets.Accuracy of thermocouplesThermocouples will function over a wide temperature range - from near absolute zero to their melting point, however they are normally only characterized over their stable range. Thermocouple accuracy is a difficult subject due to a range of factors. In principal and in practice a thermocouple can achieve excellent results (that is, significantly better than the above table indicates) if calibrated, used well below its nominal upper temperature limit and if protected from harsh atmospheres. At higher temperatures it is often better to use a heavier gauge of wire in order to maintain stability (Wire Gauge below).As mentioned previously, the temperature and voltage scales were redefined in 1990. The eight main thermocouple types - B, E, J, K, N, R, S and T - were re-characterised in 1993 to reflect the scale changes. (See: NIST Monograph 175 for details). The remaining types: C, D, G, L, M, P and U appear to have been informally re-characterised.Try the thermocouple calculator. It allows you the determine the temperature by knowing the measured voltage and the reference junction temperature.Thermocouple wire gradesThere are different grades of thermocouple wire. The principal divisions are between measurement grades and extension grades. The measurement grade has the highest purity and should be used where the temperature gradient is significant. The standard measurement grade (Class 2) is most commonly used. Special measurement grades (Class 1) are available with accuracy about twice the standard measurement grades.The extension thermocouple wire grades are designed for connecting the thermocouple to the measuring device. The extension wire may be of different metals to the measurement grade, but are chosen to have a matching response over a much reduced temperature range - typically -40°C to 120°C. The reason for using extension wire is reduced cost - they can be 20% to 30% of the cost of equivalent measurementgrades. Further cost savings are possible by using thinnergauge extension wire and a lower temperature rated insulation.Note: When temperatures within the extension wire's rating are being measured, it is OK to use the extension wire for the entire circuit. This is frequently done with T type extension wire, which is accurate over the -60 to 100°C range.Thermocouple wire gaugeAt high temperatures, thermocouple wire can under go irreversible changes in the form of modified crystal structure, selective migration of alloy components and chemical changes originating from the surface metal reacting to the surrounding environment. With some types, mechanical stress and cycling can also induce changes.Increasing the diameter of the wire where it is exposed to the high temperatures can reduce the impact of these effects.The following table can be used as a very approximate guide to wire gauge:At these higher temperatures, the thermocouple wire should be protected as much as possible from hostile gases. Reducing or oxidizing gases can corrode some thermocouple wire very quickly. Remember, the purity of the thermocouple wire is most important where the temperature gradients are greatest. It is with this part of the thermocouple wiring where the most care must be taken.Other sources of wire contamination include the mineral packing material and the protective metal sheath. Metallic vapour diffusion can be significant problem at high temperatures. Platinum wires should only be used inside a nonmetallic sheath, such as high-purity alumna.Neutron radiation (as in a nuclear reactor) can have significant permanent impact on the thermocouple calibration. This is due to the transformation of metals to different elements.High temperature measurement is very difficult in some situations. In preference, use non-contact methods. However this is not always possible, as the site of temperature measurement is not always visible to these types of sensors.Colour coding of thermocouple wireThe colour coding of thermocouple wire is something of a nightmare! There are at least seven different standards. There are some inconsistencies between standards, which seem to have been designed to confuse. For example the colour red in the USA standard is always used for the negative lead, while in German and Japanese standards it is always the positive lead. The British, French and International standards avoid the use of red entirely!Thermocouple mountingThere are four common ways in which thermocouples are mounted with in a stainless steel or Inconel sheath and electrically insulated with mineral oxides. Each of the methods has its advantages and disadvantages.Sealed and Isolated from Sheath: Good relatively trouble-free arrangement. The principal reason for not using this arrangement for all applications is its sluggish response time - the typical time constant is 75 secondsSealed and Grounded to Sheath: Can cause ground loops and other noise injection, but provides a reasonable time constant (40 seconds) and a sealed enclosure.Exposed Bead: Faster response time constant (typically 15 seconds), but lacks mechanical and chemical protection, and electrical isolation from material being measured. The porous insulating mineral oxides must be sealedExposed Fast Response: Fastest response time constant, typically 2 seconds but with fine gauge of junction wire the time constant can be 10-100 ms. In addition to problems of the exposed bead type, the protruding and light construction makes the thermocouple more prone to physical damage.Thermocouple compensation and linearizationAs mentioned above, it is possible to provide reference junction compensation in hardware or in software. The principal is the same in both cases: adding a correction voltage to the thermocouple output voltage, proportional to the reference junction temperature. To this end, the connection point of the thermocouple wires to the measuring device (i.e. where the thermocouple materials change to the copper of thecircuit electronics) must be monitored by a sensor. This area must be design to be isothermal, so that the sensor accurately tracks both reference junction temperatures.The hardware solution is simple but not always as easy to implement as one might expect.The circuit needs to be designed for a specific thermocouple type and hence lacks the flexibility of the software approach.The software compensation technique simplifies the hardware requirement, by eliminating the reference sensor amplifier and summing circuit (although a multiplexer may be required).The software algorithm to process the signals needs to be carefully written. A sample algorithm details the process.A good resource for thermocouple emf tables and coefficients is at the US Commerce Dept's NIST web site. It covers the B, E, J, K, N, R, S and T types.The thermocouple as a heat pumpThe thermocouple can function in reverse. If a current is passed through a thermocouple circuit, one junction will cool and the other warm. This is known as the Peltier Effect and is used in small cooling systems. The effect can be demonstrated by alternately passing a current through a thermocouple circuit and then quickly measuring the circuit's Seebeck voltage. This process has been used, with very fine thermocouple wire (0.025 mm with about a 10 mA current), to measure humidity by ensuring the cooled junction drops below the air's dew point. This causes condensation to form on the cooled junction. The junction is allowed to return to ambient, with the temperature curve showing an inflection at the dew point caused by the latent heat of vaporization.Measuring temperature differencesThermocouples are excellent for measuring temperatures differences, such as the wet bulb depression in measuring humidity. Sensitivity can be enhanced by constructing a thermopile - a number of thermocouple circuits in series.In the above example, the thermopile output is proportional to the temperaturedifference T1 - T2, with a sensitivity three times that of a single junction pair. In practice, thermopiles with two to hundreds of junctions are used in radiometers, heat flux sensors, flow sensors and humidity sensors. The thermocouple materials can be in wire form, but also printed or etched as foils and even electroplated.An excellent example of the thermopile is in the heat flux sensors manufactured by Hukseflux Thermal Sensors. Also see RdF Corp. and Exergen Corp.The thermocouple is unique in its ability to directly measure a temperature difference. Other sensor types require a pair of closely matched sensors to ensure tracking over the entire operational temperature range.The thermoelectric generatorWhile the Seebeck voltage is very small (in the order of 10-70μV/°C), if the circuit's electrical resistance is low (thick, short wires), then large currents are possible (e.g. many amperes). An efficiency trade-off of electrical resistance (as small as possible) and thermal resistance (as large as possible) between the junctions is the major issue. Generally, electrical and thermal resistances trend together with different materials. The output voltage can be increased by wiring as a thermopile.The thermoelectric generator has found its best-known application as the power source in some spacecraft. A radioactive material, such as plutonium, generates heat and cooling is provided by heat radiation into space. Such an atomic power source can reliably provide many tens of watts of power for years. The fact that atomic generators are highly radioactive prevents their wider application.译文:热电偶温度传感器热电偶的定义热电偶是最简单的传感器之一。
温湿度测量仪外文文献翻译、中英文翻译

外文翻译英文原文:Temperature and humidity measuring instrumentIntroductionTemperature and humidity measurement is a modern newly developed measurement field, especially the humidity measurement is to continue moving forward. Experienced a length method, dry and wet until today the course of the measurement, humidity measurement technology is maturing. Today, we are no longer satisfied with the measurement of the temperature and humidity, especially in some places to monitor directly the requirements of real-time measure and record the temperature and humidity changes in the whole process, and based on these changes identified during storage and transportation security, led to a new temperature and humidity measuring instrument was born. Temperature and humidity measuring instrument is the temperature and humidity parameters were measured according to a predetermined time interval stored in the internal memory, in the completion of the recording function will be coupled to a PC, use the adapter software data stored in accordance with values time analysis instrument. The instrument can determine the storage and transportation process, experiment process without any compromise product safety incident.MSP430F437 IntroducedThe MSP430 MCU main features are as follows:1)Ultra-low power consumption. MSP430 MCU supply voltage 1.8 to 3.6V low voltage RAM data retention mode power consumption of only 0.1uA active mode power 250uA/MIPS, IO input port leakage current of only 50nA.2)Powerful processing capability. The MSP430 MCU 16-bit microcontroller, reduced instruction set architecture with the most popular one clock cycle to execute an instruction, the MSP430 instruction speeds of up to 8MHz oscillator is 8MIPS.3)High-performance analog technology and a wealth of on-chip peripheral modules. The MSP430 monolithic organic combination of TI's high-performance analog technology, each member of the rich on-chip peripherals are integrated. Depending on the model of the different possible combinations of the following modules: watchdog,analog comparator A timer A, timer B, serial 0,1, hardware multiplier, LCD driver, 10/12/14-bit ADC, 12 DAC IIC bus, direct data access, port 1 to 6, the basic timer. 4)The system is stable. Power-on reset, first initiated by the DC0 CPU, to ensure that the program starts executing from the correct position to ensure crystal oscillator start-up and stabilization time. The software can then set the appropriate control bits of the register to determine the final system clock frequency. If the crystal oscillator is used as the CPU clock MCLK failure, the DCO will start automatically, in order to ensure the normal operation of the system. This structure and operational mechanism in the current series microcontroller is unique.5)Convenient and efficient development environment. MSP430 series OTP type, three types of FLASH-ROM, the domestic large-scale use FLASH. The development of these devices means, after the successful development of the OTP and ROM-type device using a dedicated emulator programmer or chip cover touch. FLASH type is very convenient development and debugging environment, because the device on-chip JTAG debug interface, as well as the electric flash FLASH memory using the first through the JTAG interface to download the program to the FLASH, run by the JTAG interface control program read the on-chip CPU status, and memory contents and other information for designers debug the entire development can be carried out in the same software integrated environment. Which only requires a PC and a JTAG debugger, without the need for a dedicated emulator and programmer. Temperature And Humidity SensorThe SHT7x temperature and humidity sensor characteristics are as follows:1)The temperature and humidity sensor signal is amplified conditioning, A / D converter, all integrated on one IIC bus interface;2)Given calibration relative humidity and temperature output;3)IIC bus with industry-standard digital output interface;4)With dewpoint calculation output function;5)With excellent long-term stability;6)Humidity value output resolution of 14 The temperature output resolution of 12 bits, and programmable;7)Small size (7.65 x 5.08 x 23.5mm) Surface Mount;8)Having reliable the CRC data transmission checking function;9)The chip load calibration coefficients can guarantee 100% interchangeability;AT25256 IntroductionTemperature and humidity data storage chip SPI interface uses ATMEL Corporation's low-voltage serial EEPROM AT25256. AT25256 is mainly applied to low-power occasion the internal accordance with 32K x 8-bit organization, can work at 3.3V, the maximum serial clock frequency as to 2.1MHz. Support for 64-byte page write mode and byte write mode. AT25256 by setting the write-protect pin / WP level to set the chip read-only or writable state. Serial Peripheral Interface (SPI) bus technology is a synchronous serial interface, the hardware features a strong, SPI software is quite simple, so that the CPU has more time to deal with other matters. SPI bus can be connected to multiple host MCU, equipped with SPI interface output devices, output devices, such as LCD drivers, A / D conversion and other peripherals can also be a simple connection to a single TTL shift register chip. The bus allows you to connect multiple devices, but only one device at any moment as the host.SPI bus clock line is controlled by the host, in addition to data lines: host input / output line from the machine and the host output / slave input line. Host and which slave communication through the slave strobe line selection.Application SPI system can be simple, complex and can take many forms: (1) a host MCU and the slave MCU; (2) multiple MCU are connected to each other into a multi-host system; (3) a host MCU and slave peripherals.Segment LCD Display PrincipleLCD display principle is to use the physical characteristics of the liquid crystal born, when power is turned on, arranged order so light by; arranged confusion is not energized, to prevent the light to pass through. Light to pass through and not through a combination of an image is displayed on the screen. In layman's terms, the liquid crystal display is the middle of the two glass clip a layer of liquid crystal material, the liquid crystal material to change their light transmission in the signal under the control of the state, so you can see the image in front of the glass panel. LCD ambient light to display information, the LCD itself is not self-luminous, LCD power consumption is very low, more suitable for single-chip low-power applications. In addition, the LCD can only use low-frequency AC voltage drive, the DC voltage will damage the LCD. There are many types of LCD segment liquid crystal character LCD, graphical LCD. Segment LCD inexpensive, simple to use, is widely used in a variety of microcomputer application system.MSP430 LCD driver module has four driving method, respectively, for static drive, 2MUX drive, 3MUX, Drivers, 4MUX drive. Static driving method, in additionto the public badly in need of a pin, each section of the drive each one pin. If the design involves a lot of number of segments, you need to take up the many pin. In order to reduce the pin number, you can select multiple drive needed: 2MUX drive, drive, 3MUX 4MUX driving method. Increase the number of public-pole, can greatly reduce the number of pins. Need to drive more segments, the more obvious effects. ConclusionThe design requirements to simultaneously detect the temperature and humidity. From the temperature and humidity sensor signal IIC bus to enter MSP430F437 MSP430F437, temperature and humidity data on the one hand to send the LCD display; the other hand, the temperature and humidity data is stored in AT25256 stored temperature and humidity data can be transmitted via RS232 bus to the PC, In the PC application, you can curve shows the temperature and humidity data, and can print the report.This design uses the MSP430 MCU measurement of temperature and humidity, display, storage, transmission, printing and other functions. But also through the button on the temperature and humidity measurement time interval, whether storage, starting time and other parameters set. In addition, the entire system can be connected to external 9V DC power supply, you can use a 9V lithium battery-powered, low-power design ultra-low power MSP430 MCU, and program design, making the whole system very power, particularly suitable for hand-held meter.中文翻译:温湿度测量仪1 引言温湿度测量是现代测量新发展出来的一个领域,尤其湿度的测量更是不断前进。
温度变送器中英文对照外文翻译文献

中英文对照外文翻译中英文资料对照外文翻译TT302 温度变送器概述TT302温度变送器接收毫伏(mV)输出的信号,这类传感器包括热电偶或阻性传感器,例如:热电阻(RTD)。
它所接受的信号必须在允许的输入范围之内。
允许输入电压范围为-50到500,电阻范围为0到2000欧姆。
功能描述-硬件每个板的功能介绍如下:图2.1 TT302-硬件构成方框图多路转换器多路转换器将变送器端子接到相应信号调理板上,以保证在正确的端子上测量电压。
信号调理板他的作用给输入信号提供一个正确的值以满足A/D转换。
A/D转换器A/D转换器将输入信号转换成数字形式传给CPU。
信号隔离他的作用在输入和CPU之间隔离控制信号和数字信号。
中央处理单元(CPU)RAM PROM和EEPROMCPU是变送器的智能部分,主要完成测量,板的执行,自诊断和通信的管理和运行。
系统程序存储在PROM中。
RAM用于暂时存放运算数据。
在RAM中存放的数据一旦断电立即消失,所以数据必须保存在不易丢失的EEPROM中。
例如:标定,块的标识和组态等数据。
通信控制器监视在线动态,调整通信信号,插入,删除预处理,滤波。
电源变送器电路通过现场总线电源供电。
电源隔离像信号隔离一样,供给输入部分的信号必须要隔离,电源隔离采用变压器将直流供电电源转换成高频交流供电。
显示控制器从CPU接收数据送给LCD显示器的显示部分,此时显示器必须处于打开状态。
本机调整它有两个磁性驱动开关,它们必须由磁性工具来驱动而不是机械或电的接触。
图2.2-LCD指示器温度传感器TT302像前面所描述的那样,可以兼容多种类型的传感器。
TT302为使用热电偶或热电阻RTD 测量温度进行了特殊设计。
此类传感器的基本内容如下所述:热电偶热电偶由两种不同的金属或合金在一端连接在一起所组成的,被称为测量端或热端。
测量端必须放在测量点上,热电偶的另一端是打开的连接在温度变送器上,这一端称做参考端或冷端。
在大多数应用中,塞贝克效应可以充分解释热电偶的工作原理。
数字式温度传感器中英文对照外文翻译文献

中英文资料外文翻译The introduction to The DS18B201. DESCRIPTIONThe DS18B20 digital thermometer provides 9-bit to 12-bit Celsius temperature measurements and has an alarm function with nonvolatile user programmable upper and lower trigger points. The DS18B20 communicates over a 1-Wire bus that by definition requires only one data line for communication with a central microprocessor. It has an operating temperature range of -55°C to +125°C and is accurate to ±0.5°C over the range of -10°C to +85°C. In addition, the DS18B20 can derive power directly from the data line (―parasite power‖), eliminating the need for an external power supply.Each DS18B20 has a unique 64-bit serial code, which allows multiple DS18B20s to function on the same 1-Wire bus. Thus, it is simple to use one microprocessor to control many DS18B20s distributed over a large area. Applications that can benefit from this feature include HV AC environmental controls, temperature monitoring systems inside buildings, equipment, or machinery, and process monitoring and control systems.2.FEATURES●Unique 1-Wire® Interface Requires Only One Port Pin for Communication●Each Device has a Unique 64-Bit Serial Code Stored in an On-Board ROM●Multi-drop Capability Simplifies Distributed Temperature-Sensing Applications ●Requires No External Components1●Can Be Powered from Data Line; Power Supply Range is 3.0V to 5.5V●Measures Temperatures from -55°C to +125°C (-67°F to +257°F)●±0.5°C Accuracy from -10°C to +85°C●Thermometer Resolution is User Selectable from 9 to 12 Bits●Converts Temperature to 12-Bit Digital Word in 750ms (Max)●User-Definable Nonvolatile (NV) Alarm Settings●Alarm Search Command Identifies and Addresses Devices Whose Temperature isOutside Programmed Limits●Software Compatible with the DS1822●Applications Include Thermostatic Controls, Industrial Systems, ConsumerProducts, Thermometers, or Any Thermally Sensitive System3.OVERVIEWFigure 1 shows a block diagram of the DS18B20, and pin descriptions are given in the Pin Description table. The 64-bit ROM stores the device’s unique serial code. The scratchpad memory contains the 2-byte temperature register that stores the digital output from the temperature sensor. In addition, the scratchpad provides access to the 1-byte upper and lower alarm trigger registers (TH and TL) and the 1-byte configuration register. The configuration register allows the user to set the resolution of the temperature to-digital conversion to 9, 10, 11, or 12 bits. The TH, TL, and configuration registers are nonvolatile (EEPROM), so they will retain data when the device is powered down.The DS18B20 uses Maxim’s exclusive 1-Wire bus protocol that implements bus communication using one control signal. The control line requires a weak pull up resistor since all devices are linked to the bus via a 3-state or open-drain port (the DQ pin in the case of the DS18B20). In this bus system, the microprocessor (the master device) identifies and addresses devices on the bus using each device’s unique 64-bit code. Because each device has a unique code, the number of devices that can be addressed on one DS18B20 bus is virtually unlimited. The 1-Wire bus protocol,2including detailed explanations of the commands and “time slots,‖ is covered in the 1-Wire Bus System section.Another feature of the DS18B20 is the ability to operate without an external power supply. Power is instead supplied through the 1-Wire pull up resistor via the DQ pin when the bus is high. The high bus signal also charges an internal capacitor (CPP), which then supplies power to the device when the bus is low. This method of deriving power from the 1-Wire bus is referred to as ―parasite power.‖ As an alternative, the DS18B20 may also be powered by an external supply on VDD.Figure 1.DS18B20 Block Diagram4.OPERATION—MEASURING TEMPERATURThe core functionality of the DS18B20 is its direct-to-digital temperature sensor. The resolution of the temperature sensor is user-configurable to 9, 10, 11, or 12 bits, corresponding to increments of 0.5°C, 0.25°C, 0.125°C, and 0.0625°C, respectively. The default resolution at power-up is 12-bit. The DS18B20 powers up in a low-power idle state. To initiate a temperature measurement and A-to-D conversion, the master must issue a Convert T [44h] command. Following the conversion, the resulting thermal data is stored in the 2-byte temperature register in the scratchpad memory and the DS18B20 returns to its idle state. If the DS18B20 is powered by an external supply, the master can issue ―read time slots‖ (see the 1-Wire Bus System section) after the Convert T command and the DS18B20 will respond by transmitting 0 while3the temperature conversion is in progress and 1 when the conversion is done. If the DS18B20 is powered with parasite power, this notification technique cannot be used since the bus must be pulled high by a strong pull up during the entire temperature conversion.The DS18B20 output temperature data is calibrated in degrees Celsius; for Fahrenheit applications, a lookup table or conversion routine must be used. The temperature data is stored as a 16-bit sign-extended two’s complement number in the temperature register (see Figure 2). The sign bits (S) indicate if the temperature is positive or negative: for positive numbers S = 0 and for negative numbers S = 1. If the DS18B20 is configured for 12-bit resolution, all bits in the temperature register will contain valid data. For 11-bit resolution, bit 0 is undefined. For 10-bit resolution, bits 1 and 0 are undefined, and for 9-bit resolution bits 2, 1, and 0 are undefined. Table 1 gives examples of digital output data and the corresponding temperature reading for 12-bit resolution conversions.5.64-BIT LASERED ROM CODE4Each DS18B20 contains a unique 64–bit code (see Figure 3) stored in ROM. The least significant 8 bits of the ROM code contain the DS18B20’s 1-Wire family code: 28h. The next 48 bits contain a unique serial number. The most significant 8 bits contain a cyclic redundancy check (CRC) byte that is calculated from the first 56 bits of the ROM code. The 64-bit ROM code and associated ROM function control logic allow the DS18B20 to operate as a 1-Wire device using the protocol detailed in the 1-Wire Bus System section.Figure 3.64-Bit Lasered ROM Code6.MEMORYThe DS18B20’s memory is organized as shown in Figure 4. The memory consists of an SRAM scratchpad with nonvolatile EEPROM storage for the high and low alarm trigger registers (TH and TL) and configuration register. Note that if the DS18B20 alarm function is not used, the TH and TL registers can serve as general-purpose memory.Byte 0 and byte 1 of the scratchpad contain the LSB and the MSB of the temperature register, respectively. These bytes are read-only. Bytes 2 and 3 provide access to TH and TL registers. Byte 4 contains the configuration register data. Bytes 5, 6, and 7 are reserved for internal use by the device and cannot be overwritten. Byte 8 of the scratchpad is read-only and contains the CRC code for bytes 0 through 7 of the scratchpad. The DS18B20 generates this CRC using the method described in the CRC Generation section.Data is written to bytes 2, 3, and 4 of the scratchpad using the Write Scratchpad [4Eh] command; the data must be transmitted to the DS18B20 starting with the least significant bit of byte 2. To verify data integrity, the scratchpad can be read (using the Read Scratchpad [BEh] command) after the data is written. When reading the scratchpad, data is transferred over the 1-Wire bus starting with the least significant56bit of byte 0. To transfer the TH, TL and configuration data from the scratchpad to EEPROM, the master must issue the Copy Scratchpad [48h] command.7.CONFIGURATION REGISTERByte 4 of the scratchpad memory contains the configuration register, which is organized as illustrated in Figure 5. The user can set the conversion resolution of the DS18B20 using the R0 and R1 bits in this register as shown in Table 2. The power-up default of these bits is R0 = 1 and R1 = 1 (12-bit resolution). Note that there is a direct tradeoff between resolution and conversion time. Bit 7 and bits 0 to 4 in the configuration register are reserved for internal use bythe device and cannot be overwritten.8.1-WIRE BUS SYSTEMThe 1-Wire bus system uses a single bus master to control one or more slave devices. The DS18B20 is always a slave. When there is only one slave on the bus, the system is referred to as a ―single-drop‖ system; the system is ―multi-drop‖ if there are multiple slaves on the bus. All data and commands are transmitted least significant bit first over the 1-Wire bus. The following discussion of the 1-Wire bus system is broken down into three topics: hardware configuration, transaction sequence, and1-Wire signaling (signal types and timing).9.TRANSACTION SEQUENCEThe transaction sequence for accessing the DS18B20 is as follows:Step 1. InitializationStep 2. ROM Command (followed by any required data exchange)Step 3. DS18B20 Function Command (followed by any required data exchange)It is very important to follow this sequence every time the DS18B20 is accessed, as the DS18B20 will not respond if any steps in the sequence are missing or out of order. Exceptions to this rule are the Search ROM [F0h] and Alarm Search [ECh] commands. After issuing either of these ROM commands, the master must return to Step 1 in the sequence.(1)INITIALIZATIONAll transactions on the 1-Wire bus begin with an initialization sequence. The initialization sequence consists of a reset pulse transmitted by the bus master followed7by presence pulse(s) transmitted by the slave(s). The presence pulse lets the bus master know that slave devices (such as the DS18B20) are on the bus and are ready to operate.(2)ROM COMMANDSAfter the bus master has detected a presence pulse, it can issue a ROM command. These commands operate on the unique 64-bit ROM codes of each slave device and allow the master to single out a specific device if many are present on the 1-Wire bus. These commands also allow the master to determine how many and what types of devices are present on the bus or if any device has experienced an alarm condition. There are five ROM commands, and each command is 8 bits long. The master device must issue an appropriate ROM command before issuing a DS18B20 function command.1.SEARCH ROM [F0h]When a system is initially powered up, the master must identify the ROM codes of all slave devices on the bus, which allows the master to determine the number of slaves and their device types. The master learns the ROM codes through a process of elimination that requires the master to perform a Search ROM cycle (i.e., Search ROM command followed by data exchange) as many times as necessary to identify all of the slave devices. If there is only one slave on the bus, the simpler Read ROM command can be used in place of the Search ROM process.2.READ ROM [33h]This command can only be used when there is one slave on the bus. It allows the bus master to read the slave’s 64-bit ROM code without using the Search ROM procedure. If this command is used when there is more than one slave present on the bus, a data collision will occur when all the slaves attempt to respond at the same time.3.MATCH ROM [55h]The match ROM command followed by a 64-bit ROM code sequence allows8the bus master to address a specific slave device on a multi-drop or single-drop bus. Only the slave that exactly matches the 64-bit ROM code sequence will respond to the function command issued by the master; all other slaves on the bus will wait for a reset pulse.4.SKIP ROM [CCh]The master can use this command to address all devices on the bus simultaneously without sending out any ROM code information. For example, the master can make all DS18B20s on the bus perform simultaneous temperature conversions by issuing a Skip ROM command followed by a Convert T [44h] command. Note that the Read Scratchpad [BEh] command can follow the Skip ROM command only if there is a single slave device on the bus. In this case, time is saved by allowing the master to read from the slave without sending the device’s 64-bit ROM code. A Skip ROM command followed by a Read Scratchpad command will cause a data collision on the bus if there is more than one slave since multiple devices will attempt to transmit data simultaneously.5.ALARM SEARCH [ECh]The operation of this command is identical to the operation of the Search ROM command except that only slaves with a set alarm flag will respond. This command allows the master device to determine if any DS18B20s experienced an alarm condition during the most recent temperature conversion. After every Alarm Search cycle (i.e., Alarm Search command followed by data exchange), the bus master must return to Step 1 (Initialization) in the transaction sequence.(3)DS18B20 FUNCTION COMMANDSAfter the bus master has used a ROM command to address the DS18B20 with which it wishes to communicate, the master can issue one of the DS18B20 function commands. These commands allow the master to write to and read from the DS18B20’s scratchpad memory, initiate temperature conversions and determine the power supply mode.91.CONVERT T [44h]This command initiates a single temperature conversion. Following the conversion, the resulting thermal data is stored in the 2-byte temperature register in the scratchpad memory and the DS18B20 returns to its low-power idle state. If the device is being used in parasite power mode, within 10µs (max) after this command is issued the master must enable a strong pull up on the 1-Wire bus. If the DS18B20 is powered by an external supply, the master can issue read time slots after the Convert T command and the DS18B20 will respond by transmitting a 0 while the temperature conversion is in progress and a 1 when the conversion is done. In parasite power mode this notification technique cannot be used since the bus is pulled high by the strong pull up during the conversion.2.READ SCRATCHPAD [BEh]This command allows the master to read the contents of the scratchpad. The data transfer starts with the least significant bit of byte 0 and continues through the scratchpad until the 9th byte (byte 8 – CRC) is read. The master may issue a reset to terminate reading at any time if only part of the scratchpad data is needed.3.WRITE SCRATCHPAD [4Eh]This command allows the master to write 3 bytes of data to the DS18B20’s scratchpad. The first data byte is written into the TH register (byte 2 of the scratchpad), the second byte is written into the TL register (byte 3), and the third byte is written into the configuration register (byte 4). Data must be transmitted least significant bit first. All three bytes MUST be written before the master issues a reset, or the data may be corrupted.4.COPY SCRATCHPAD [48h]This command copies the contents of the scratchpad TH, TL and configuration registers (bytes 2, 3 and 4) to EEPROM. If the device is being used in parasite power mode, within 10µs (max) after this command is issued the master must enable a10strong pull-up on the 1-Wire bus.5.RECALL E2 [B8h]This command recalls the alarm trigger values (TH and TL) and configuration data from EEPROM and places the data in bytes 2, 3, and 4, respectively, in the scratchpad memory. The master device can issue read time slots following the Recall E2command and the DS18B20 will indicate the status of the recall by transmitting 0 while the recall is in progress and 1 when the recall is done. The recall operation happens automatically at power-up, so valid data is available in the scratchpad as soon as power is applied to the device.6.READ POWER SUPPL Y [B4h]The master device issues this command followed by a read time slot to determine if any DS18B20s on the bus are using parasite power. During the read time slot, parasite powered DS18B20s will pull the bus low, and externally powered DS18B20s will let the bus remain high.10.WIRE SIGNALINGThe DS18B20 uses a strict 1-Wire communication protocol to ensure data integrity. Several signal types are defined by this protocol: reset pulse, presence pulse, write 0, write 1, read 0, and read 1. The bus master initiates all these signals, with the exception of the presence pulse.(1)INITIALIZATION PROCEDURE—RESET AND PRESENCE PULSES All communication with the DS18B20 begins with an initialization sequence that consists of a reset pulse from the master followed by a presence pulse from the DS18B20. This is illustrated in Figure 6. When the DS18B20 sends the presence pulse in response to the reset, it is indicating to the master that it is on the bus and ready to operate.During the initialization sequence the bus master transmits (TX) the reset pulse by pulling the 1-Wire bus low for a minimum of 480µs. The bus master then releases11the bus and goes into receive mode (RX). When the bus is released, the 5kΩ pull-up resistor pulls the 1-Wire bus high. When the DS18B20 detects this rising edge, it waits 15µs to 60µs and then transmits a presence pulse by pulling the 1-Wire bus low for 60µs to 240µs.TimingBus master pulling lowDS18B20 pulling lowResistor pullupFigure 6.Initialization Timing(2)READ/WRITE TIME SLOTSThe bus master writes data to the DS18B20 during write time slots and reads data from the DS18B20 during read time slots. One bit of data is transmitted over the 1-Wire bus per time slot.1.WRITE TIME SLOTSThere are two types of write time slots: ―Write 1‖ time slots and ―Write 0‖ time slots. The bus master uses a Write 1 time slot to write a logic 1 to the DS18B20 and a Write 0 time slot to write a logic 0 to the DS18B20. All write time slots must be a minimum of 60µs in duration with a minimum of a 1µs recovery time between individual write slots. Both types of write time slots are initiated by the master pulling the 1-Wire bus low (see Figure 7).To generate a Write 1 time slot, after pulling the 1-Wire bus low, the bus master must release the 1-Wirebus within 15µs. When the bus is released, the 5kΩ pull-up resistor will pull the bus high. To generate a Write 0 time slot, after pulling the 1-Wire1213bus low, the bus master must continue to hold the bus low for the duration of the time slot (at least 60µs).The DS18B20 samples the 1-Wire bus during a window that lasts from 15µs to 60µs after the master initiates the write time slot. If the bus is high during the sampling window, a 1 is written to the DS18B20. If the line is low, a 0 is written to the DS18B20.DS18B20Write Time SlotSTART OF SLOTVccBus master pulling low Resistor pullupFigure 7.DS18B20 Write Time Slot2.READ TIME SLOTSThe DS18B20 can only transmit data to the master when the master issues read time slots. Therefore, the master must generate read time slots immediately after issuing a Read Scratchpad [BEh] or Read Power Supply [B4h] command, so that the DS18B20 can provide the requested data. In addition, the master can generate read time slots after issuing Convert T [44h] or Recall E 2 [B8h] commands to find out the status of the operation.All read time slots must be a minimum of 60µs in duration with a minimum of a 1µs recovery time between slots. A read time slot is initiated by the master device pulling the 1-Wire bus low for a minimum of 1µs and then releasing the bus (see Figure 8). After the master initiates the read time slot, the DS18B20 will begin transmitting a 1 or 0 on bus. The DS18B20 transmits a 1 by leaving the bus high andtransmits a 0 by pulling the bus low. When transmitting a 0, the DS18B20 will release the bus by the end of the time slot, and the bus will be pulled back to its high idle state by the pull up resister. Output data from the DS18B20 is valid for 15µs after the falling edge that initiated the read time slot. Therefore, the master must release the bus and then sample the bus state within 15µs from the start of the slot.VccBus master pulling lowResistor pullupDS18B20 pulling lowFigure 8.DS18B20 Read Time Slot14DS18B20介绍1.说明DS18B20数字式温度传感器提供9位到12位的摄氏温度测量,并且有用户可编程的、非易失性温度上下限告警出发点。
数字温度传感器毕业论文中英文资料外文翻译文献[管理资料]
![数字温度传感器毕业论文中英文资料外文翻译文献[管理资料]](https://img.taocdn.com/s3/m/6bf8f73450e2524de4187ed1.png)
毕业论文中英文资料外文翻译文献外文资料DS1722 Digital ThermometerWith scientific and technological progress and development of the types of temperature sensors increasingly wide range of application of the increasingly widespread, and the beginning analog toward digital, single-bus, dual-bus and bus-3 direction. And the number of temperature sensors because they apply to all microprocessor interface consisting of automatic temperature control system simulation can be overcome sensor and microprocessor interface need signal conditioning circuit and A / D converters advant ages of the drawbacks, has been widely used in industrial control, electronic transducers, medical equipment and other temperature control system. Among them, which are more representative of a digital temperature sensor DS18B20, MAX6575, the DS1722, MAX6636 other. This paper introduces the DS1722 digital temperature sensor characteristics, the use of the method and its timing. Internal structure and other relevant content.FEATURES:Temperature measurements require no external components;Measures temperatures from -55°C to +120°C. Fahrenheit equivalent is -67°F to +248°F;Thermometer accuracy is ±°C;Thermometer resolution is configurable from 8 to 12 bits (°C to °C resolution);Data is read from/written to via a Motorola Serial Peripheral Interface (SPI) or standard 3-wire serial interface;Wide analog power supply range ( - );Separate digital supply allows for logic;Available in an 8-pin SOIC (150 mil), 8-pin USOP, and flip chip package;PIN ASSIGNMENTFIGURE 1 PIN ASSIGNMENTPIN DESCRIPTION:SERMODE - Serial Interface Mode.CE - Chip Enable.SCLK - Serial Clock.GND – Ground.VDDA - Analog Supply Voltage.SDO - Serial Data Out.SDI - Serial Data In.VDDD - Digital Supply Voltage.DESCRIPTION:The DS1722 Digital Thermometer and Thermostat with SPI/3-Wire Interface provides temperature readings which indicate the temperature of the device. No additional components are required; the device is truly a temperature-to-digital converter. Temperature readings are communicated from the DS1722 over a Motorola SPI interface or a standard 3-wire serial interface. The choice of interface standard is selectable by the user. For applications that require greater temperature resolution, the user can adjust the readout resolution from 8 to 12 bits. This is particularly useful in applications where thermal runaway conditions must be detected quickly.For application flexibility, the DS1722 features a wide analog supply rail of - . A separate digital supply allows a range of to . The DS1722 is available in an 8-pin SOIC (150-mil), 8-pin USOP, and flip chip package.Applications for the DS1722 include personal computers/servers/workstations, cellular telephones, office equipment, or any thermally-sensitive system.OVERVIEW:A block diagram of the DS1722 is shown in Figure 2. The DS1722 consists offour major components:1. Precision temperature sensor.2. Analog-to-digital converter.3. SPI/3-wire interface electronics.4. Data registers.The factory-calibrated temperature sensor requires no external components. The DS1722 is in a power conserving shutdown state upon power-up. After power-up, the user may alter the configuration register to place the device in a continuous temperature conversion mode or in a one-shot conversion mode. In the continuous conversion mode, the DS1722 continuously converts the temperature and stores the result in the temperature register. As conversions are performed in the background, reading the temperature register does not affect the conversion in progress. In the one-shot temperature conversion mode, the DS1722 will perform one temperature conversion, store the result in the temperature register, and then eturn to the shutdown state. This conversion mode is ideal for power sensitive applications. More information on the configuration register is contained in the “OPERATION-Programming”section. The temperature conversion results will have a default resolution of 9 bits. In applications where small incremental temperature changes are critical, the user can change the conversion resolution from 9 bits to 8, 10, 11, or 12. This is accomplished by programming the configuration register. Each additional bit of resolution approximately doubles the conversion time. The DS1722 can communicate using either a Motorola Serial Peripheral Interface (SPI) or standard 3-wire interface. The user can select either communication standard through the SERMODE pin, tying it to VDDD for SPI and to ground for 3-wire. The device contains both an analog supply voltage and a digital supply voltage (VDDA and VDDD, respectively). The analog supply powers the device for operation while the digital supply provides the top rails for the digital inputs and outputs. The DS1722 was designed to be Logic-Ready.DS1722 FUNCTIONAL BLOCK DIAGRAM Figure 2OPERATION-Measuring Temperature:The core of DS1722 functionality is its direct-to-digital temperature sensor. The DS1722 measures temperature through the use of an on-chip temperature measurement technique with an operating range from -55°to +120°C. The device powers up in a power-conserving shutdown mode. After power-up, the DS1722 may be placed in a continuous conversion mode or in a one-shot conversion mode. In the continuous conversion mode, the device continuously computes the temperature and stores the most recent result in the temperature register at addresses 01h (LSB) and 02h (MSB). In the one-shot conversion mode, the DS1722 performs one temperature conversion and then returns to the shutdown mode, storing temperature in the temperature register. Details on how to change the setting after power up are contained in the “OPERATION-Programming”section. The resolution of the temperature conversion is configurable (8, 9, 10, 11, or 12 bits), with 9-bit readings the default state. This equates to a temperature resolution of °C, °C, °C, °C, or °C. Following each conversion, thermal data is stored in the thermometer register in two’s complement format; the information can be retrieved over the SPI or 3-wire interface with the address set to the temperature register, 01h (LSB) and then 02h (MSB). Table 2 describesthe exact relationship of output data to measured temperature. The table assumes the DS1722 is configured for 12-bit resolution; if the evince is configured in a lower resolution mode, those bits will contain 0s. The data is transmitted serially over the digital interface, MSB first for SPI communication and LSB first for 3-wire communication. The MSB of the temperature register contains the “sign” (S) bit, denoting whether the temperature is positive or negative. For Fahrenheit usage, a lookup table or conversion routine must be used.AddressLocation S 2625242322212002h MSB (unit = ℃) LSB2-12-22-32-40 0 0 0 01hTEMPERATURE DIGITAL OUTPUT(BINARY) DIGITAL OUTPUT(HEX)+120℃0111 1000 0000 0000 7800h+ 0001 1001 0001 0000 1910h+ 0000 1010 0010 0000 0a20h+ 0000 0000 1000 0000 0080h0 0000 0000 0000 0000 0000h1111 1111 1000 0000 Ff80h1111 0101 1110 0000 F5e0h1110 0110 1111 0000 E6f0h-55 1100 1001 0000 0000 C900h OPERATION-Programming:The area of interest in programming the DS1722 is the Configuration register. All programming is done via the SPI or 3-wire communication interface by selecting the appropriate address of the desired register location. Table 3 illustrates the addresses for the two registers (configuration and temperature) of the DS1722.Register Address Structure Table 3CONFIGURATION REGISTER PROGRAMMING:The configuration register is accessed in the DS1722 with the 00h address for reads and the 80h address for writes. Data is read from or written to the configuration register MSB first for SPI communication and LSB first for 3-wire communication. The format of the register is illustrated in Figure 2. The effect each bit has on DS1722 functionality is described below along with the power-up state of the bit. The entire register is volatile, and thus it will power-up in the default state.CONFIGURATION/STATUS REGISTER Figure 21SHOT = One-shot temperature conversion bit. If the SD bit is "1", (continuous temperature conversions are not taking place), a "1" written to the 1SHOT bit will cause the DS1722 to perform one temperature conversion and store the results in the temperature register at addresses 01h (LSB) and 02h (MSB). The bit will clear itself to "0" upon completion of the temperature conversion. The user has read/write access to the 1SHOT bit, although writes to this bit will be ignored if the SD bit is a "0", (continuous conversion mode). The power-up default of the one-shot bit is "0".R0, R1, R2 = Thermometer resolution bits. Table 4 below defines the resolution of the digital thermometer, based on the settings of these 3 bits. There is a direct tradeoff between resolution and conversion time, as depicted in the AC Electrical Characteristics. The user has read/write access to the R2, R1 and R0 bits and the power-up default state is R2="0", R1="0", and R0="1" (9-bit conversions).THERMOMETER RESOLUTION CONFIGURATION Table 4SD = Shutdown bit. If SD is "0", the DS1722 will continuously perform temperature conversions and store the last completed result in the temperature register. If SD is changed to a "1", the conversion in progress will be completed and stored and then the device will revert to a low-power shutdown mode. The communication port remains active. The user has read/write access to the SD bit and the power-up default is "1" (shutdown mode).SERIAL INTERFACE:The DS1722 offers the flexibility to choose between two serial interface modes. The DS1722 can communicate with the SPI interface or with a standard 3-wire interface. The interface method used is determined by the SERMODE pin. When this pin is connected to VDDD SPI communication is selected. When this pin is connected to ground, standard 3-wire communication is selected.SERIAL PERIPHERAL INTERFACE (SPI):The serial peripheral interface (SPI) is a synchronous bus for address and data transfer. The SPI mode of serial communication is selected by tying the SERMODE pin to VDDD. Four pins are used for the SPI. The four pins are the SDO (Serial Data Out), SDI (Serial Data In), CE (Chip Enable), and SCLK (Serial Clock). The DS1722 is the slave device in an SPI application, with the microcontroller being the master. The SDI and SDO pins are the serial data input and output pins for the DS1722, respectively. The CE input is used to initiate and terminate a data transfer. The SCLK pin is used to synchronize data movement between the master (microcontroller) and the slave (DS1722) devices. The shift clock (SCLK), which is generated by the microcontroller, is active only when CE is high and during address and data transfer to any device on the SPI bus. The inactive clock polarity is programmable in somemicrocontrollers. The DS1722 offers an important feature in that the level of the inactive clock is determined by sampling SCLK when CE becomes active. Therefore, either SCLK polarity can be accommodated. There is one clock for each bit transferred. Address and data bits are transferred in groups of eight, MSB first.3-WIRE SERIAL DATA BUS:The 3-wire communication mode operates similar to the SPI mode. However, in 3-wire mode, there is one bi-directional I/O instead of separate data in and data out signals. The 3-wire consists of the I/O (SDI and SDO pins tied together), CE, and SCLK pins. In 3-wire mode, each byte is shifted in LSB first unlike SPI mode where each byte is shifted in MSB first. As is the case with the SPI mode, an address byte is written to the device followed by a single data byte or multiple data bytes.外文资料译文DS1722数字温度传感器随着科学技术的不断进步和发展,温度传感器的种类日益繁多,应用逐渐广泛,并且开始由模拟式向着数字式、单总线式、双总线式和三总线式发展。
单片机温度控制系统外文翻译外文文献英文文献中英翻译

Design of the Temperature Control System Based onAT89C51ABSTRACTThe principle and functions of the temperature control system based on micro controller AT89C51 are studied, and the temperature measurement unit consists of the 1-Wire bus digital temperature sensor DS18B20. The system can be expected to detect the preset temperature, display time and save monitoring data. An alarm will be given by system if the temperature exceeds the upper and lower limit value of the temperature which can be set discretionarily and then automatic control is achieved, thus the temperature is achieved monitoring intelligently within a certain range. Basing on principle of the system, it is easy to make a variety of other non-linear control systems so long as the software design is reasonably changed. The system has been proved to be accurate, reliable and satisfied through field practice.KEYWORDS: AT89C51; micro controller; DS18B20; temperature 1 INTRODUCTIONTemperature is a very important parameter in human life. In the modern society, temperature control (TC) is not only used in industrial production, but also widely used in other fields. With the improvement of the life quality, we can find the TC appliance in hotels, factories and home as well. And the trend that TC will better serve the whole society, so it is of great significance to measure and control the temperature. Based on the AT89C51 and temperature sensor DS18B20, this system controls the condition temperature intelligently. The temperature can be set discretionarily within a certain range. The system can show the time on LCD, and save monitoring data; andautomatically control the temperature when the condition temperature exceeds the upper and lower limit value. By doing so it is to keep the temperature unchanged. The system is of high anti-jamming, high control precision and flexible design; it also fits the rugged environment. It is mainly used in people's life to improve the quality of the work and life. It is also versatile, so that it can be convenient to extend the use of the system. So the design is of profound importance. The general design, hardware design and software design of the system are covered.1.1 IntroductionThe 8-bit AT89C51 CHMOS microcontrollers are designed to handle high-speed calculations and fast input/output operations. MCS 51 microcontrollers are typically used for high-speed event control systems. Commercial applications include modems, motor-control systems, printers, photocopiers, air conditioner control systems, disk drives, and medical instruments. The automotive industry use MCS 51 microcontrollers in engine-control systems, airbags, suspension systems, and antilock braking systems (ABS). The AT89C51 is especially well suited to applications that benefit from its processing speed and enhanced on-chip peripheral functions set, such as automotive power-train control, vehicle dynamic suspension, antilock braking, and stability control applications. Because of these critical applications, the market requires a reliable cost-effective controller with a low interrupt latency response, ability to service the high number of time and event driven integrated peripherals needed in real time applications, and a CPU with above average processing power in a single package. The financial and legal risk of having devices that operate unpredictably is very high. Once in the market, particularly in mission critical applications such as an autopilot or anti-lock braking system, mistakesare financially prohibitive. Redesign costs can run as high as a $500K, much more if the fix means 2 back annotating it across a product family that share the same core and/or peripheral design flaw. In addition, field replacements of components is extremely expensive, as the devices are typically sealed in modules with a total value several times that of the component. To mitigate these problems, it is essential that comprehensive testing of the controllers be carried out at both the component level and system level under worst case environmental and voltage conditions. This complete and thorough validation necessitates not only a well-defined process but also a proper environment and tools to facilitate and execute the mission successfully. Intel Chandler Platform Engineering group provides post silicon system validation (SV) of various micro-controllers and processors. The system validation process can be broken into three major parts. The type of the device and its application requirements determine which types of testing are performed on the device.1.2 The AT89C51 provides the following standard features4Kbytes of Flash, 128 bytes of RAM, 32 I/O lines, two 16-bittimer/counters, a five vector two-level interrupt architecture, a full duple ser-ial port, on-chip oscillator and clock circuitry. In addition, the AT89C51 is designed with static logic for operation down to zero frequency and supports two software selectable power saving modes. The Idle Mode stops the CPU while allowing the RAM, timer/counters, serial port and interrupt sys -tem to continue functioning. The Power-down Mode saves the RAM contents but freezes the oscil–lator disabling all other chip functions until the next hardware reset.1.3Pin DescriptionVCC Supply voltage.GND Ground.Port 0:Port 0 is an 8-bit open-drain bi-directional I/O port. As an output port, each pin can sink eight TTL inputs. When 1s are written to port 0 pins, the pins can be used as high impedance inputs. Port 0 may also be configured to be the multiplexed low order address/data bus during accesses to external program and data memory. In this mode P0 has internal pull ups. Port 0 also receives the code bytes during Flash programming, and outputs the code bytes during program verification. External pull ups are required during program verification.Port 1:Port 1 is an 8-bit bi-directional I/O port with internal pull ups. The Port 1 output buffers can sink/so -urce four TTL inputs. When 1s are written to Port 1 pins they are pulled high by the internal pull ups and can be used as inputs. As inputs, Port 1 pins that are externally being pulled low will source current (IIL) because of the internal pullups. Port 1 also receives the low-order address bytes during Flash programming and verification.Port 2:Port 2 is an 8-bit bi-directional I/O port with internal pull ups. The Port 2 output buffers can sink/source four TTL inputs. When 1s are written to Port 2 pins they are pulled high by the internal pull ups and can be used as inputs. As inputs, Port 2 pins that are externally being pulled low will source current (IIL) because of the internal pull ups. Port 2 emits the high-order address byte during fetches from external program memory and during accesses to Port 2 pins that are externally being pulled low will source current (IIL) because of the internal pull ups. Port 2 emits the high-order address byte during fetches from external program memory and during accesses to external data memory that use 16-bit addresses (MOVX@DPTR). In this application,it uses strong internal pull-ups when emitting 1s. During accesses to external data memory that use 8-bit addresses (MOVX @ RI), Port 2 emits the contents of the P2 Special Function Register. Port 2 also receives the high-order address bits and some control signals durin Flash programming and verification.Port 3:Port 3 is an 8-bit bi-directional I/O port with internal pull ups. The Port 3 output buffers can sink/sou -rce four TTL inputs. When 1s are written to Port 3 pins they are pulled high by the internal pull ups and can be used as inputs. As inputs, Port 3 pins that are externally being pulled low will source current (IIL) because of the pull ups.Port 3 also serves the functions of various special features of the AT89C51 as listed below:RST:Reset input. A high on this pin for two machine cycles while the oscillator is running resets the device.ALE/PROG:Address Latch Enable output pulse for latching the low byte of the address during accesses to external memory. This pin is also the program pulse input (PROG) during Flash programming. In normal operation ALE is emitted at a constant rate of 1/6 the oscillator frequency, and may be used for external timing or clocking purposes. Note, however, that one ALE pulse is skipped duri-ng each access to external Data Memory. If desired, ALE operation can be disabled by setting bit 0 of SFR location 8EH. With the bit set, ALE is active only during a MOVX or MOVC instruction. Otherwise, the pin is weakly pulled high. Setting the ALE-disable bit has no effect if the microcontroller is in external execution mode.PSEN:Program Store Enable is the read strobe to external program memory. When theAT89C51 is executing code from external program memory, PSEN is activated twice each machine cycle, except that two PSEN activations are skippedduring each access to external data memory.EA/VPP:External Access Enable. EA must be strapped to GND in order to enable the device to fetch code from external program memory locations starting at 0000H up to FFFFH. Note, however, that if lock bit 1 is programmed, EA will be internally latched on reset. EA should be strapped to VCC for internal program executions. This pin alsreceives the 12-volt programming enable voltage (VPP) during Flash programming, for parts that require 12-volt VPP.XTAL1:Input to the inverting oscillator amplifier and input to the internal clock operating circuit.XTAL2 :Output from the inverting oscillator amplifier. Oscillator CharacteristicsXTAL1 and XTAL2 are the input and output, respectively, of an inverting amplifier which can be configured for use as an on-chip oscillator, as shown in Figure 1. Either a quartz crystal or ceramic resonator may be used. To drive the device from an external clock source, XTAL2 should be left unconnected while XTAL1 is driven as shown in Figure 2.There are no requirements on the duty cycle of the external clock signal, since the input to the internal clocking circuitry is through a divide-by-two flip-flop, but minimum and maximum voltage high and low time specifications must be observed. Idle Mode In idle mode, the CPU puts itself to sleep while all the on chip peripherals remain active. The mode is invoked by software. The content of the on-chip RAM and all the special functions registers remain unchanged during this mode. The idle mode can be terminated by any enabled interrupt or by a hardware reset. It should be noted that when idle is terminated by a hard ware reset, the device normally resumes program execution, from where it left off, up to two machine cycles before the internal reset algorithm takes control. On-chip hardware inhibits accessto internal RAM in this event, but access to the port pins is not inhibited. To eliminate the possibility of an unexpected write to a port pin when Idle is terminated by reset, the instruction following the one that invokes Idle should not be one that writes to a port pin or to external memory.Power-down ModeIn the power-down mode, the oscillator is stopped, and the instruction that invokes power-down is the last instruction executed. The on-chip RAM and Special Function Registers retain their values until the power-down mode is terminated. The only exit from power-down is a hardware reset. Reset redefines the SFRS but does not change the on-chip RAM. The reset should not be activated before VCC is restored to its normal operating level and must be held active long enough to allow the oscillator to restart and stabilize. The AT89C51 code memory array is programmed byte-by byte in either programming mode. To program any nonblank byte in the on-chip Flash Memory, the entire memory must be erased using the Chip Erase Mode.2 Programming AlgorithmBefore programming the AT89C51, the address, data and control signals should be set up according to the Flash programming mode table and Figure 3 and Figure 4. To program the AT89C51, take the following steps.1. Input the desired memory location on the address lines.2. Input the appropriate data byte on the data lines. 3. Activate the correct combination of control signals. 4. Raise EA/VPP to 12V for the high-voltage programming mode. 5. Pulse ALE/PROG once to program a byte in the Flash array or the lock bits. The byte-write cycle is self-timed and typically takes no more than 1.5 ms. Repeat steps 1 through 5, changing the address and data for the entire array or until the end of the object reached. Data Polling: The AT89C51features Data Polling to indicate the end of a write cycle. During a write cycle, an attempted read of the last byte written will result in the complement of the written datum on PO.7. Once the write cycle has been completed, true data are valid on all outputs, and the next cycle may begin. Data Polling may begin any time after a write cycle has been initiated.2.1Ready/Busy:The progress of byte programming can also be monitored by the RDY/BSY output signal. P3.4 is pulled low after ALE goes high during programming to indicate BUSY. P3.4 is pulled high again when programming is done to indicate READY.Program Verify:If lock bits LB1 and LB2 have not been programmed, the programmed code data can be read back via the address and data lines for verification. The lock bits cannot be verified directly. Verification of the lock bits is achieved by observing that their features are enabled.2.2 Chip Erase:The entire Flash array is erased electrically by using the proper combination of control signals and by holding ALE/PROG low for 10 ms. The code array is written with all “1”s. The chip erase operation must be executed before the code memory can be re-programmed.2.3 Reading the Signature Bytes:The signature bytes are read by the same procedure as a normal verification of locations 030H, 031H, and 032H, except that P3.6 and P3.7 must be pulled to a logic low. The values returned areas follows.(030H) = 1EH indicates manufactured by Atmel(031H) = 51H indicates 89C51(032H) = FFH indicates 12V programming(032H) = 05H indicates 5V programming2.4 Programming InterfaceEvery code byte in the Flash array can be written and the entire array can be erased by using the appropriate combination of control signals. The write operation cycle is self timed and once initiated, will automatically time itself to completion. A microcomputer interface converts information between two forms. Outside the microcomputer the information handled by an electronic system exists as a physical signal, but within the program, it is represented numerically. The function of any interface can be broken down into a number of operations which modify the data in some way, so that the process of conversion between the external and internal forms is carried out in a number of steps. An analog-to-digital converter(ADC) is used to convert a continuously variable signal to a corresponding digital form which can take any one of a fixed number of possible binary values. If the output of the transducer does not vary continuously, no ADC is necessary. In this case the signal conditioning section must convert the incoming signal to a form which can be connected directly to the next part of the interface, the input/output section of the microcomputer itself. Output interfaces take a similar form, the obvious difference being that here the flow of information is in the opposite direction; it is passed from the program to the outside world. In this case the program may call an output subroutine which supervises the operation of the interface and performs the scaling numbers which may be needed for digital-to-analog converter(DAC). This subroutine passes information in turn to an output device which produces a corresponding electrical signal, which could be converted into analog form using a DAC. Finally the signal is conditioned(usually amplified) to a form suitable for operating an actuator.The signals used within microcomputer circuits are almost always too small to be connected directly to the outside world” and some kind of interface must be used to translate them to a more appropriate form. The design of section of interface circuits is one of the most important tasks facing the engineer wishing to apply microcomputers. We have seen that in microcomputers information is represented as discrete patterns of bits; this digital form is most useful when the microcomputer is to be connected to equipment which can only be switched on or off, where each bit might represent the state of a switch or actuator. To solve real-world problems, a microcontroller must have more than just a CPU, a program, and a data memory. In addition, it must contain hardware allowing the CPU to access information from the outside world. Once the CPU gathers information and processes the data, it must also be able to effect change on some portion of the outside world. These hardware devices, called peripherals, are the CPU’s window to the outside.The most basic form of peripheral available on microcontrollers is the general purpose I70 port. Each of the I/O pins can be used as either an input or an output. The function of each pin is determined by setting or clearing corresponding bits in a corresponding data direction register during the initialization stage of a program. Each output pin may be driven to either a logic one or a logic zero by using CPU instructions to pin may be viewed (or read.) by the CPU using program instructions. Some type of serial unit is included on microcontrollers to allow the CPU to communicate bit-serially with external devices. Using a bit serial format instead of bit-parallel format requires fewer I/O pins to perform the communication function, which makes it less expensive, but slower. Serial transmissions are performed either synchronously orasynchronously.3 SYSTEM GENERAL DESIGNThe hardware block diagram of the TC is shown in Fig.1. The system hardware includes the micro controller, temperature detection circuit, keyboard control circuit, clock circuit, Display, alarm, drive circuit and external RAM. Based on the AT89C51, the DS18B20 will transfer the temperature signal detected to digital signal. And the signal is sent to the micro controller for processing. At last the temperature value is showed on the LCD 12232F. These steps are used to achieve the temperature detection. Using the keyboard interface chip HD7279 to set the temperature value, using the micro controller to keep a certain temperature, and using the LCD to show the preset value for controlling the temperature. In addition, the clock chip DS1302 is used to show time and the external RAM 6264 is used to save the monitoring data. An alarm will be given by buzzer in time if the temperature exceeds the upper and lower limit value of the temperature.3.1 HARDWARE DESIGNA. Micro controllerThe AT89C51 is a low-power, high-performance CMOS 8-bit micro controller with 4K bytes of in-system programmable Flash memory. The device is manufactured using At mel’s high-density nonvolatile memory technology and is compatible with the industry-standard 80C51 instruction set and pin out. The on-chip Flash allows the program memory to be reprogrammed in-system or by a conventional nonvolatile memory programmer. By combining a versatile 8-bit CPU with in-system programmable Flash on a monolithic chip, the At mel AT89C51 is a powerful micro controller which provides a highly-flexible and cost-effective solution to many embedded controlapplications. Minimum system of the micro controller is shown in Fig. 2. In order to save monitoring data, the 6264 is used as an external RAM. It is a static RAM chip, low-power with 8K bytes memory.B. Temperature Detection CircuitThe temperature sensor is the key part in the system. The Dallas DS18B20 is used, which supports the 1-Wire bus interface, and the ON-BOARD Patented is used internally. All the sensor parts and the converting circuit are integrated in integrated circuit like a transistor [1]. Its measure range is -55℃~125 ℃, and the precision between -10℃~85℃is ±0.5℃[2 ,3]. The temperature collected by the DS18B20 is transmitted in the 1-Wire bus way, and this highly raises the system anti-jamming and makes it fit in situ temperature measurement of the rugged environment [4]. There are two power supply ways for the DS18B20. The first is external power supply: the first pin of the DS18B20 is connected to the ground; the second pin serves as signal wire and the third is connected to the power. The second way is parasite power supply [5]. As the parasite power supply will lead to the complexity of the hardware circuit, the difficulty of the software control and the performance degradation of the chip, etc. But the DS18B20(s) can be connected to the I/O port of the micro controller in the external power supply way and it is more popular. Therefore the external power supply is used and the second pin is connected to the pin P1.3 of the AT89S51. Actually, if there are multipoint to be detected, the DS18B20(s) can be connected to the 1-Wire bus. But when the number is over 8, there is a concern to the driving and the more complex software design as well as the length of the 1-Wire bus. Normally it is no more than 50m. To achieve distant control, the system can be designed in to a wireless one to break the length limit of the 1-Wire bus [6].C. LCD CircuitThe LCD 12232F is used, which can be used to show characters, temperature value and time, and supply a friendly display interface. The 12232F is a LCD with 8192 128×32 pixels Chinese character database and 128 16×8 pixels ASCII character set graphics. It mainly consists of row drive/column drive and 128×32 full lattice LCD with t he function of displaying graphics as well as 7.5×2 Chinese characters. It is in a parallel or serial mode to connect to external CPU [7]. In order to economize the hardware resource, the 12232F should be connected to the AT89S51 in serial mode with only 4 output ports used. The LCD grayscale can be changed by adjusting the variable resistor connected the pin Vlcd of the LCD. CLK is used to transmit serial communication clock. SID is used to transmit serial data. CS is used to enable control the LCD. L+ is used to control the LCD backlight power.D. Clock CircuitThe Dallas DS18B20 is used, which is a high performance, low-power and real-time clock chip with RAM. The DS18B20 serves in the system with calendar clock and is used to monitor the time. The time data is read and processed by the AT89C51 and then displayed by the LCD. Also the time can be adjusted by the keyboard. The DS18B20 crystal oscillator is set at 32768Hz, and the recommended compensation capacitance is 6pF. The oscillator frequency is lower, so it might be possible not to connect the capacitor, and this would not make a big difference to the time precision. The backup power supply can be connected to a 3.6V rechargeable battery.E. Keyboard Control CircuitThe keyboard interface in the system is driven by the HD7279A which has a +5V single power supply and which is connected to the keyboard and display without using anyactive-device. According to the basic requirements and functions of the system, only 6 buttons are needed. The system's functions are set by the AT89C51 receiving the entered data. In order to save the external resistor, the 1×6 keyboard is used, and the keyboard codes are defined as: 07H, 0FH, 17H, 1FH, 27H, 2FH. The order can be read out by reading the code instruction. HD7279A is connected to the AT89S51 in serial mode and only 4 ports are need. As shown in Fig. 6, DIG0~DIG5 and DP are respectively the column lines and row line ports of the six keys which achieve keyboard monitoring, decoding and key codes identification.F. Alarm CircuitIn order to simplify the circuit and convenient debugging, a 5V automatic buzzer is used in the alarm circuit [8]. And this make the software programming simplified. As shown in Fig. 7, it is controlled by the PNP transistor 9012 whose base is connected to the pin P2.5 of the AT89C51. When the temperature exceeds the upper and lower limit value, the P2.5 output low level which makes the transistor be on and then an alarm is given by the buzzer.G. Drive CircuitA step motor is used as the drive device to control the temperature. The four-phase and eight-beat pulse distribution mode is used to drive motor and the simple delay program is used to handle the time interval between the pulses to obtain different rotational speed. There are two output states for the step motor. One: when the temperature is over the upper value, the motor rotates reversely (to low the temperature), while when lower than the lower limit value, the motor rotates normally (to raise the temperature); besides not equals the preset value. Two: when the temperature is at somewhere between the two endsand equals the preset value, the motor stops. These steps are used to achieve the temperature control. In addition, the motor speed can also be adjusted by relative buttons. As shown in Fig. 8, the code data is input through ports A11~A8 (be P2.3~P2.0) of the AT89C51 and inverted output by the inverter 74LS04. Finally it is amplified by the power amplifier 2803A to power the motor.3.2 SOFTWARE DESIGNAccording to the general design requirement and hardware circuit principle of the system, as well as the improvement of the program readability, transferability and the convenient debugging, the software design is modularized. The system flow mainly includes the following 8 steps: POST (Power-on self-test), system initiation, temperature detection, alarm handling, temperature control, clock chip DS18B20 operation, LCD and keyboard operation. The main program flow is shown in Fig. 9. Give a little analysis to the above 8 tasks, it is easy to find out that the last five tasks require the real time operation. But to the temperature detection it can be achieved with timer0 timing 1 second, that is to say temperature detection occurs per second. The system initiation includes global variable definition, RAM initiation, special function register initiation and peripheral equipment initiation. Global variable definition mainly finishes the interface definition of external interface chip connected to the AT89C51, and special definition of some memory units. RAM initiation mainly refers to RAM processing. For example when the system is electrified the time code will be stored in the internal unit address or the scintillation flag will be cleared. The special function register initiation includes loading the initial value of timer and opening the interrupt. For example, when the system is electrified the timer is initialized. Theperipheral equipment initiation refers to set the initial value of peripheral equipment. For example, when the system is electrified, the LCD should be initialized, the start-up display should be called, the temperature conversion command should be issued firstly and the clock chip DS18B20 should also be initialized. The alarm handling is mainly the lowering and the raising of temperature to make the temperature remain with the preset range. When the temperature is between the upper and the lower limit value, it goes to temperature control handling, that is to say the temperature need to be raised or lowered according to the preset value. By doing so make the condition temperature equal to the preset value and hence to reach the temperature target.4 CONCLUSIONThe temperature control system has the advantages of friendly human-computer interaction interface, simple hardware, low cost, high temperature control precision (error in the range of ±1 ℃), convenience and versatility, etc. It can be widely used in the occasions with -55℃to 125℃range, and there is a certain practical value.温度控制系统的设计摘要研究了基于AT89C51单片机温度控制系统的原理和功能,温度测量单元由单总线数字温度传感器DS18B20构成。
罗斯蒙特848T温度变送器选型中文样本
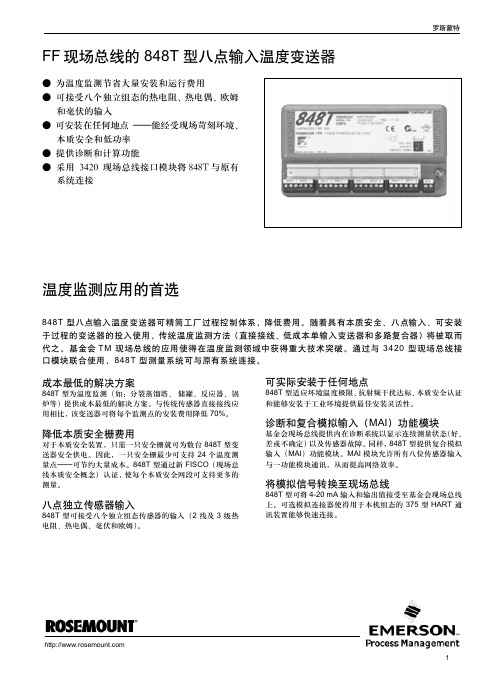
85
C
-40
185
F
!"#
C
1.8
F ! C
!"# !" = 0.00385 = 0.003916 Ni 120 0.003 0.003 0.003 0.004 0.03 C C C C C C CCC+
1 0.0054 0.0054 0.0054 0.0072 0.054 F R 0.0025% R - 300 0.011% R - 100 0.00043% R 0.00029% R 0.0025% |R| 0.00054% R 0.0025% |R| 0.00036% R R 0.0036% R 0.0043% |R| R R R 300 100 F F F F
7.5-11.9 mm !" 1/2 NPT
!"
!"#$% !" T1 !"#$ !"#$%!"&'()*+*,-./0-123 ! !"# 848T !"# $%& !ASME B 16.5 ANSI /IEEE C62.41-1991 IEEE 587 ! A2 B3 6 kV / 3 kA 1.2 x 50 S 8 x 20 S ! 6 kV / 0.5 kA 100 kHz ! 4 kV EFT 5 x 50 nS !"#$%
!"#$%&
!"#$%&'()*+,-./012345 !"# !"#$% 848T !"#$ MAI !"MAI !"#$%&'()* !"#$%& !"#$%&
温度控制系统中英文对照外文翻译文献

温度控制系统中英文对照外文翻译文献温度控制系统中英文对照外文翻译文献(文档含英文原文和中文翻译)译文:温度控制系统的设计摘要:研究了基于AT89S 51单片机温度控制系统的原理和功能,温度测量单元由单总线数字温度传感器DS18B 20构成。
该系统可进行温度设定,时间显示和保存监测数据。
如果温度超过任意设置的上限和下限值,系统将报警并可以和自动控制的实现,从而达到温度监测智能一定范围内。
基于系统的原理,很容易使其他各种非线性控制系统,只要软件设计合理的改变。
该系统已被证明是准确的,可靠和满意通过现场实践。
关键词:单片机;温度;温度I. 导言温度是在人类生活中非常重要的参数。
在现代社会中,温度控制(TC)不仅用于工业生产,还广泛应用于其它领域。
随着生活质量的提高,我们可以发现在酒店,工厂和家庭,以及比赛设备。
而比赛的趋势将更好地服务于整个社会,因此它具有十分重要的意义测量和控制温度。
在AT89S51单片机和温度传感器DS18B20的基础上,系统环境温度智能控制。
温度可设定在一定范围内动任意。
该系统可以显示在液晶显示屏的时间,并保存监测数据,并自动地控制温度,当环境温度超过上限和下限的值。
这样做是为了保持温度不变。
该系统具有很高的抗干扰能力,控制精度高,灵活的设计,它也非常适合这个恶劣的环境。
它主要应用于人们的生活,改善工作和生活质量。
这也是通用的,因此它可以方便地扩大使用该系统。
因此,设计具有深刻的重要性。
一般的设计,硬件设计和软件系统的设计都包括在内。
II. 系统总体设计该系统硬件包括微控制器,温度检测电路,键盘控制电路,时钟电路,显示,报警,驱动电路和外部RAM。
基于AT89S51单片机,DS18B20的将温度信号传送到数字信号的检测。
和信号发送到微控制器进行处理。
最后,温度值显示在液晶12232F。
这些步骤是用来实现温度检测。
使用键盘接口芯片HD7279在设定温度值,使用微控制器保持一定的温度,并使用液晶显示的温度控制设定值。
温度传感器中英文对照外文翻译文献

中英文资料外文翻译文献原文:Temperature Sensor ICs Simplify DesignsWhen you set out to select a temperature sensor, you are no longer limited to either an analog output or a digital output device. There is now a broad selection of sensor types, one of which should match your system's needs.Until recently, all the temperature sensors on the market provided analog outputs. Thermistors, RTDs, and thermocouples were followed by another analog-output device, the silicon temperature sensor. In most applications, unfortunately, these analog-output devices require a comparator, an ADC, or an amplifier at their output to make them useful.Thus, when higher levels of integration became feasible, temperature sensors with digital interfaces became available. These ICs are sold in a variety of forms, from simple devices that signal when a specific temperature has been exceeded to those that report both remote and local temperatures while providing warnings at programmed temperature settings. The choice now isn't simply between analog-output and digital-output sensors; there is a broad range of sensor types from which to choose.Classes of Temperature SensorsFour temperature-sensor types are illustrated in Figure 1. An ideal analog sensor provides an output voltage that is a perfectly linear function of temperature (A). In the digital I/O class of sensor (B), temperature data in the form of multiple 1s and 0s are passed to the microcontroller, often via a serial bus. Along the same bus, data are sent to the temperature sensor from the microcontroller, usually to set the temperature limit at which the alert pin's digital output will trip. Alert interrupts the microcontroller when the temperature limit has been exceeded. This type of device can also provide fan control.Figure 1. Sensor and IC manufacturers currently offer four classes of temperature sensors."Analog-plus" sensors (C) are available with various types of digital outputs. The V OUT versus temperature curve is for an IC whose digital output switches when a specific temperature has been exceeded. In this case, the "plus" added to the analog temperature sensor is nothing more than a comparator and a voltage reference. Other types of "plus" parts ship temperature data in the form of the delay time after the part has been strobed, or in the form of the frequency or the period of a square wave, which will be discussed later.The system monitor (D) is the most complex IC of the four. In addition to the functions provided by the digital I/O type, this type of device commonly monitors the system supply voltages, providing an alarm when voltages rise above or sink below limits set via the I/O bus. Fan monitoring and/or control is sometimes included in this type of IC. In some cases, this class of device is used to determine whether or not a fan is working. More complex versions control the fan as a function of one or more measured temperatures. The system monitor sensor is not discussed here but is briefly mentioned to give a complete picture of the types of temperature sensors available.Analog-Output Temperature SensorsThermistors and silicon temperature sensors are widely used forms of analog-output temperature sensors. Figure 2 clearly shows that when a linear relationship between voltage and temperature is needed, a silicon temperature sensor is a far better choice than a thermistor. Over a narrow temperature range, however, thermistors can provide reasonable linearity and good sensitivity. Many circuits originally constructed with thermistors have over time been updated using silicon temperature sensors.Figure 2. The linearity of thermistors and silicon temperature sensors, two popular analog-output temperature detectors, is contrasted sharply.Silicon temperature sensors come with different output scales and offsets. Some, for example, are available with output transfer functions that are proportional to K, others to °C or °F. Some of the °C parts provide an offset so that negative temperatures can be monitored using a single-ended supply.In most applications, the output of these devices is fed into a comparator or a n A/D converterto convert the temperature data into a digital format. Despite the need for these additional devices, thermistors and silicon temperature sensors continue to enjoy popularity due to low cost and convenience of use in many situations.Digital I/O Temperature SensorsAbout five years ago, a new type of temperature sensor was introduced. These devices include a digital interface that permits communication with a microcontroller. The interface is usually an I²C or SMBus serial bus, but other serial interfaces such as SPI are common. In addition to reporting temperature readings to the microcontroller, the interface also receives instructions from the microcontroller. Those instructions are often temperature limits, which, if exceeded, activate a digital signal on the temperature sensor IC that interrupts the microcontroller. The microcontroller is then able to adjust fan speed or back off the speed of a microprocessor, for example, to keep temperature under control.This type of device is available with a wide variety of features, among them, remote temperature sensing. To enable remote sensing, most high-performance CPUs include an on-chip transistor that provides a voltage analog of the temperature. (Only one of the transistor's two p-n junctions is used.) Figure 3 shows a remote CPU being monitored using this technique. Other applications utilize a discrete transistor to perform the same function.Figure 3. A user-programmable temperature sensor monitors the temperature of a remote CPU's on-chip p-n junction.Another important feature found on some of these types of sensors (including the sensor shown in Figure 3) is the ability to interrupt a microcontroller when the measured temperature falls outside a range bounded by high and low limits. On other sensors, an interrupt is generated when the measured temperature exceeds either a high or a low temperature threshold (i.e., not both). For the sensor in Figure 3, those limits are transmitted to the temperature sensor via the SMBus interface. If the temperature moves above or below the circumscribed range, the alert signal interrupts the processor.Pictured in Figure 4 is a similar device. Instead of monitoring one p-n junction, however, it monitors four junctions and its own internal temperature. Because Maxim's MAX1668 consumes a small amount of power, its internal temperature is close to the ambient temperature. Measuring the ambient temperature gives an indication as to whether or not the system fan is operating properly.Figure 4. A user-programmable temperature sensor monitors its own local temperature and the temperatures of four remote p-n junctions.Controlling a fan while monitoring remote temperature is the chief function of the IC shown in Figure 5. Users of this part can choose between two different modes of fan control. In the PWM mode, the microcontroller controls the fan speed as a function of the measured temperature by changing the duty cycle of the signal sent to the fan. This permits the power consumption to be far less than that of the linear mode of control that this part also provides. Because some fans emit an audible sound at the frequency of the PWM signal controlling it, the linear mode can be advantageous, but at the price of higher power consumption and additional circuitry. The added power consumption is a small fraction of the power consumed by the entire system, though.Figure 5. A fan controller/temperature sensor IC uses either a PWM- or linear-mode control scheme.This IC provides the alert signal that interrupts the microcontroller when the temperature violates specified limits. A safety feature in the form of the signal called "overt" (an abbreviated version of "over temperature") is also provided. If the microcontroller or the software were to lock up while temperature is rising to a dangerous level, the alert signal would no longer be useful. However, overt, which goes active once the temperature rises above a level set via the SMBus, is typically used to control circuitry without the aid of the microcontroller. Thus, in thishigh-temperature scenario with the microcontroller not functioning, overt could be used to shut down the system power supplies directly, without the microcontroller, and prevent a potentially catastrophic failure.This digital I/O class of devices finds widespread use in servers, battery packs, and hard-disk drives. Temperature is monitored in numerous locations to increase a server's reliability: at the motherboard (which is essentially the ambient temperature inside the chassis), inside the CPU die, and at other heat-generating components such as graphics accelerators and hard-disk drives. Battery packs incorporate temperature sensors for safety reasons and to optimize charging profiles, which maximizes battery life.There are two good reasons for monitoring the temperature of a hard-disk drive, which depends primarily on the speed of the spindle motor and the ambient temperature: The read errors in a drive increase at temperature extremes, and a hard disk's MTBF is improved significantly through temperature control. By measuring the temperature within the system, you can control motor speed to optimize reliability and performance. The drive can also be shut down. In high-end systems, alerts can be generated for the system administrator to indicate temperature extremes or situations where data loss is possible.Analog-Plus Temperature Sensors"Analog-plus" sensors are generally suited to simpler measurement applications. These ICs generate a logic output derived from the measured temperature and are distinguished from digital I/O sensors primarily because they output data on a single line, as opposed to a serial bus.In the simplest instance of an analog-plus sensor, the logic output trips when a specific temperature is exceeded. Some of these devices are tripped when temperature rises above a preset threshold, others, when temperature drops below a threshold. Some of these sensors allow the temperature threshold to be adjusted with a resistor, whereas others have fixed thresholds.The devices shown in Figure 6 are purchased with a specific internal temperature threshold. The three circuits illustrate common uses for this type of device: providing a warning, shutting down a piece of equipment, or turning on a fan.Figure 6. ICs that signal when a temperature has been exceeded are well suited forover/undertemperature alarms and simple on/off fan control.When an actual temperature reading is needed, and a microcontroller is available, sensors that transmit the reading on a single line can be useful. With the microcontroller's internal counter measuring time, the signals from this type of temperature sensor are readily transformed to a measure of temperature. The sensor in Figure 7 outputs a square wave whose frequency is proportional to the ambient temperature in Kelvin. The device in Figure 8 is similar, but theperiod of the square wave is proportional to the ambient temperature in kelvins.Figure 7. A temperature sensor that transmits a square wave whose frequency is proportional tothe measured temperature in Kelvin forms part of a heater controller circuit.Figure 8. This temperature sensor transmits a square wave whose period is proportional to the measured temperature in Kelvin. Because only a single line is needed to send temperature information, just a single optoisolator is required to isolate the signal path.Figure 9, a truly novel approach, allows up to eight temperature sensors to be connected on this common line. The process of extracting temperature data from these sensors begins when the microcontroller's I/O port strobes all the sensors on the line simultaneously. The microcontroller is then quickly reconfigured as an input in order to receive data from each of the sensors. The data are encoded as the amount of time that transpires after the sensors are strobed. Each of the sensors encodes this time after the strobe pulse within a specific range of time. Collisions are avoided by assigning each sensor its own permissible time range.Figure 9. A microcontroller strobes up to eight temperature sensors connected on a common line and receives the temperature data transmitted from each sensor on the same line.The accuracy achieved by this method is surprisingly high: 0.8°C is typical at room temperature, precisely matching that of the IC that encodes temperature data in the form of the frequency of the transmitted square wave. The same is true of the device that uses the period of the square wave.These devices are outstanding in wire-limited applications. For example, when a temperature sensor must be isolated from the microcontroller, costs are kept to a minimum because only one optoisolator is needed. These sensors are also of great utility in automotive and HVAC applications, because they reduce the amount of copper running over distances.Anticipated Temperature Sensor DevelopmentsIC temperature sensors provide a varied array of functions and interfaces. As these devicescontinue to evolve, system designers will see more application-specific features as well as new ways of interfacing the sensors to the system. Finally, the ability of chip designers to integrate more electronics in the same die area ensures that temperature sensors will soon include new functions and special interfaces.翻译:温度传感器芯片简化设计当选择一个温度传感器时,将不再局限于模拟输出或数字输出设备。
温度检测英文参考文献

An Automatic Measuring System Based on Atmospherical Measurement Used for Temperature Relay For temperature relay, it is very important to measure its temperatures for action and reversion. In this paper, anautomatic measuring system based on atmospherical measurement is discussed, which is very simple andprecise in practical application. In atmospherical measurement, it is crucial to design a favorable temperaturefield. The resistance stove is designed for simulating temperature field. The even temperature is improved bylong-time warm-up and placing orifice-board in testing room. According to the enactment controlling temperature curve, the algorithm of fuzzy control is used to control the temperature in temperature field. The regulating voltage mode of double-direction Bi-directional thyristors is used for controlling temperature. The system consists of the console and the resistance stove,and the console includes software platform and hardware platform. In this system, The method of grouping the resistance wire of resistance stove according to the power is put forward, and the performance of resistance stove is improved based on this method. The measuring precision is improved by using the minimum two-multiplication to calibrate the error. At present, the system has been practically applied in manufacture, which has gained obvious economy benefit and will be widely applied in the future.1. IntroductionThe temperature relay is one of common relays, which takes action when the outside temperature arrives at the given temperature. The temperature relay performs lots of functions, such as temperature control, fire alarm, automatic ignition, wiring heat-protection, so it is widely used in scientific research, industry and defense industry etc. For temperature relay, it is very important to measure its temperatures for action and reversion. But in the current manufacture, the manual measuring methods, such as spot-check method, mercuric thermometer method etc, dominate the measuring methods. However there are some inescapable short comings in these methods, such as low efficiency, large labor intensity and bad precision etc. Thus measurement has become the bottleneck of the quality of temperature relay. With theperpetual progress in the technology, the need for product quality gets more and more strict and the degree in manufacture automatization gets more and more deep. For temperature relay, today the manual measuring methods have become unfitted for the need for manufacture and will be necessarily replaced by the automatic measuring methods. In this paper, an automatic measuring system based on atmospherical measurement is discussed, which is very simple and precise in practical application.2. Measuring principieTwo kinds of metals whose inflated coefficient make a great deal of difference are hard composed together, and then the dishing twin-sheet metal comes into being.When the temperature relay arrives at a certain given value, one upward curving force will come into being in twin-sheet metal as a result of big expanding for nether metal and small expanding for upper metal. When the twin-sheet metal bends at a certain extent, it will drive the electric contact and switch on or switch off the circuit. When the temperature relay reduces at a certain given value, the twin-sheet metal gradually involutes. When the twin-sheet metal resumes at a certain extent, it will 3rd International Symposium on Instrumentation Science and Technology Aug. 18~22, 2004, Xi’an. China drive the electric contact in inverse direction and switch on or switch off the circuit. The working principle of dishing twin-sheet metal is described as Fig1:1-the initiatory state(room temperature), 2-the state after heated or cooled, 3-displacement.The temperature relay takes action due to the rising of ambience temperature or the heating of passing current.The resistance of relay is very small. So compared with the temperature rising caused by ambience temperature, the temperature rising caused by current heating also is very small and can be ignored. Thus measuring temperatures for action and reversion is implemented by controlling the environment temperature. There are three methods for measuring temperatures for action and reversion, which are liquid measurement, atmospherical measurement and testing-block measurement in GJB1517-92<Total criterion for constant temperature relay>.[1] Liquid MeasurementIn the constant temperature trough whose temperature can be intercalated, the medium that is water or oil is equably churned up. The measuring method is that the product is placed in the constant temperature trough heated or cooled. Because the liquid is equably churned up, the even temperature, good and the temperature precision is fairly high in which the temperature error is the temperature fluctuating degree is ±0.3℃. Thus the heating coherence of the products that are placed in different position in the constant temperature trough is very good, the measuring precision is very high and the parameter-repeating quality is all right. But this method is just applied in sealed temperature relay and the oil can stain the product. So few manufacturer adopts the method. Only the disputed appears and precise measurement is needed, the method is adopted.[2] Atmospherical MeasurementThe electrical oven whose temperature can be intercalated equably churns up the atmosphere. The measuring method is that the product is placed in the electrical oven heated or cooled. In the temperature field, the even temperature that is ±2℃and the temperature precision in which the temperature error is ±2℃and the temperature fluctuating degree is ±1.5℃are both not good. The heating coherence of the products that are placed in different position in the electrical oven, the measuring precision and the parameter-repeating quality apparently are not as much as liquid measurement. But the method is widely adopted because of simpleness,few pollution and batch.[3] Testing-block MeasurementA coppery block with a thermometer whose diameter isφ60~φ90mm and whose thickness is 20~30mm and a set of heating or cooling device make up of the measuring system.The measuring method is that in the room temperature the product is tightly placed on the surface of testing-block that is placed on the heating or cooling device whose temperature can be adjusted, and the temperature characteristic of the product is determined by measuring the temperature of the testing-block. Adjusting temperature of the testing-block is very hard because of measured in the room temperature, thus only a few product can be measured each time and the method unfitsfor volume-produce. But because of its simpleness, it fits for a small quantity of produce.Generally speaking, if the product is sealed and isn’t stained by oil, liquid measurement is adopted; if the product is placed in the heating or sealed body, atmospherical measurement is adopted; if the product is placed on the surface of the controlled object in room temperature, testing-block measurement is adopted. In this system, atmospherical measurement is adopted.In atmospherical measurement, the electrical oven is used for simulating the environmental temperature around the temperature relay. So for accomplishing measurement and enhancing precision, it is crucial to design a favorable temperature field. In this system, the resistance stove is designed for simulating temperature field. The performance of the temperature field is greatly improved by the even temperature and by the algorithm for controlling temperature.Because the temperature field takes atmosphere as the diathermanous medium, heat convection has a great effect on the distribution of the temperature field. In course of measuring, the fan is used for strengthening heat convection. But because of heat radiation in the testing room and obstruction from the diathermanous board onthe clamp that doesn’t make heated atmosphere swimmingly cycle, the temperature field degressively distributes by height in the vertical, and the temperature grads field comes into being. Thus the temperature asymmetry is inevitable. In this system, two methods are used for improving the even temperature. One is that by long-time warm-up atmosphere in testing room is adequately heated and the temperature grads is reduced.The other is that the orifice-board for making airflow equably flow is placed in testing room, thereby the temperature stability in the section of the measuring point is effectively ensured.In the light of academic analysis and repeating experimentation, the perfect controlling temperature curve of the temperature field is described as Fig 2:TB-the demarcated temperature for action , the parameter which express the decentralization of the temperature for action. Firstly the temperature high-rate rises. When the temperature arrives at the range of the temperature for action, the temperature rises bythe slower rate K2 and the temperature for action is measured. When the temperature arrives at the upper limit of the temperature for action, the temperature falls by the slower rate K3 and the temperature is measured. For the resistance stove, lag, inertia and nonlinear are bad and the parameter changes with time. Thus according to the enactment controlling temperature curve, the algorithm of fuzzy control is used to control the temperature in temperature field. So the model of the controlled object can be avoided identifying and Robust is excellent. The regulating voltage mode of double-direction Bi-directional thyristors is used for controlling temperature. Firstly the value and error of the temperature are fuzzied, and then the fuzzy rule from repeating experimentation does fuzzy illation, then through the barycenter method fuzzy estimate calculates the accurate value, at last after D/A transform the accurate value controls the Bi-directional thyristors by regulating voltage, so temperature risingOr falling of the resistance stove can be controlled.3. Automatic measuring systemAutomatically controlled by the computer, the temperature of the resistance stove reposefully rises from the lower limit of the temperature for action. When the relay takes action, the temperature for action is displayed and the arraignment appears, then the computer automatically controls the temperature reposefully falling. When the relay reverts, the temperature for reversion is also displayed and the arraignment appears, thereby an integrated measuring process ends.Based on Windows2000 operating system, the software developed by Microsoft Visual Basic 6.0 makes up of measuring module, user interface and database of measuring result. As control core of the measuring system, the measuring module automatically controls temperature rising or falling of the resistance stove, real-time acquires the temperature signal and the switch signal of the temperature relay, measures and records temperatures for action and reversion, alarms beyond the temperature range etc. The user interface consists of command button and menu, real-time temperature curve and the windows that real-time display measuring state and real-time modify parameters, which offers the user a friendly man-machineinterface. forms for the future analysis and estimate. Thus the database of measuring result is created, which effectively performs the functions of data backup and printing recordation. Furthermore, some accessorial programs are designed, such as hardware exception handles, real-time modify parameters program, upgrade program etc, which effectively enhance reliability and maintainability of the system.In this system, two methods are adopted aiming at some technical difficulty in measuring process, which obviously enhance the holistic quality.[1] The method of grouping the resistance wire of resistance stove according to the powerThe three-phase SSR electric power regulator indirectly regulates heating power through regulating switching on and off time of the resistance wire, thereby controls temperature rising or falling of the resistance stove. But the regulative extent of high-power stove wire is so wide that it is very difficult to accurately control the rate of rising or falling. For enhancing regulative sensitivity, lower-power stove wire should be adopted. However because the system comes down to more than twenty products and the measuring upper limit arrives at 600, the low-power stove wire cannot heat to such a high temperature. Facing to this problem, the method ofgrouping the resistance wire of resistance stove according to the power is put forward, which is that the low-power stove wire is applied in low temperature and the high-power stove wire is applied in high temperature. It is practically proved that the method effectively solves above problem and improves the quality of resistance stove.[2] The holistic minimum two-multiplication to calibrate the errorIn this system, the holistic minimum two-multiplication to calibrate the error is adopted. Firstly the current temperature at measuring point is mensurated by the high-precision temperature sensor, at the same time the current value output to computer is gained, and then a set of such data is mensurated in the temperature range.coefficients of the minimum two-multiplication multinomial are gained. At last when the coefficients are input nto program, the fitting of temperature cure is accomplished and the holistic system error is calibrated.4. ConclusionThe automatic measuring system used for temperature relay has been checked and accepted. The critical result is shown as follows. Thus it can be seen that the system has gained obvious economy benefit and will be widely applied in the future. References[1]HU Hong-bin. Measuring for temperature characteristic of temperature relay.Electro Mechanical element, 2003,(9):46-48[2]SUN Kai. Controlling temperature system of resistance stove. Sensor Technology,2003,22(2): 50-52[3]ZHONG Guo-min, WANG Gai-ming. A system used for controlling temperature.Automatization transaction, 1993,19(2):223-226[4]CHEN Hua, FU Li-hua.Application of controlling temperature using fuzzy controltheory. Journal of Liaoning university, 1995,22(1):34-38[5]LI Xian-ming.Research for automatic measuring system of temperature relay.Electron andAutomatization, 1997(3):24-27测量大气温度的自动测试系统温度继电器,它在国内外都有非常重要的作用,其温度的行动和逆转。
一体化温度变送器英文使用说明书

JWBIntegration temperaturetransmitter instructionsv3.0First summarizeJWB Integration temperature transmitter is a noncontact measuring temperature field with instrument ,Usually the related secondary instrument or computer data acquisition system supporting the use of the measurement ,It can accuratelymeasure the temperature of all kinds of medium and objects (used scope 200 ℃ ~ 1600 ℃) working process .The Principle of JWB Integration temperature transmitter is taking an amplifier transmission module into the waterproof or the critical terminal box of fabricated temperature sensor ,and connected with the sensor , output Standard 4 ~ 20 mA DC (two wire) .This series product were issued by the relevant national standards and regulations related GB JJG related content , and meet the relevant documents to IEC standard ,then finished by learning advantages of the reference of the same products abroad .It Makes the product more reliable, accurate, very suitable for all kinds of environment of the temperature measurement . Second technology parametersPower: 24 V DC (18 ~ 36 V DC) current output load: 500 Ω quartile (24 V DC) . Output: 4 ~ 20 mA .Precision: B level 0.5% (the module working in 10 ℃ ~ 70 ℃).nge: sighed in the product nameplate output protection: the sensor open, themaximum output of module must be less than 25 mA. Third wiring 、appearanceFourththe basic structure3.1 basic structure: sensor + (connection device + junction box + protection tube) +transmission module.3.2 Length: L = protection tube presidents × insert length (unit: mm, the seal facefollowing). 3.3 the length of the cold end.a. Transmission module working temperature between20 ℃ ~ 75 ℃.It makes t he temperature down between the temperature field and radiation by the cold end length ,Protecting the analog module circuit .b. If the thermocouple adopted , there must be cold end length .c. Protecting terminals and cable .d. The standard length of the cold end is 150 mm ,seeing the cold temperaturemeasurement environment influence situation can be appropriately changed , For example, below 125 ℃ temperature ,it should be 50 mm length or no cold end ,Higher temperature measurement ,The cold end length must be appropriately extended .Fifth installation5.1 Sensor can be insert into the temperature field center position.5.2 Generally, perpendicular installation is used in high temperature measuring, suchas side outfit will make protection pipe deformation damage, then protect the stent may be need.5.3 A strength tube maybe need in disturbance occasion, sensor is inserted into thepipe from strengthen monitoring site; As requiring the fast response time ,keep parts out .5.4 If the measurement of velocity places (such as pipe), not only the impact of the fluid,but also the damage of eddy should be considered.The structure strength of the tube must be good,and the installation method is also very important, such as flowing down the inclined installation, or in the pipeline turn orthogonal place tomeet insert installation.Related knowledge1,According to JJG national measurement standards, the temperature sensor must be inspected between 3 and 6 months once,and be replaced one year old. 2,Transmission modulemust be inspected and calibrated once between 6and 12 months. (the potentiometer Z [W1] the 4mA, G [W2] the 20 mA) 3,Selecting the product structure model carefully according to the work environment, because it relates the safety and life of product.4,Products which were designed by of the usingparty ,if there were problem of the quality and production party have nothing to do.Beijing Collihigh Sensor Techology Co,.Ltd.Address:8F,Tower C,ke shi builing,Armor 28,xinxi road,Haidian district Beijing China Postal code:100085 Tel:86-10-82671108 Fax:86-10-62533666。
热控词汇英汉对照

A安全safety安全保护装置hazardous protection device安全帽safety helmet安全性security安全硬件safety hardware安装mounting安装架mounting yoke安装孔板orifice fitting安装位置mounting position安装应变误差mounting strain error按钮push button B八位位组octet靶式流量测量仪表target flow measuring device靶式流量计target flowmeter白炽灯incandescent lamp伴热电缆heat-tracing cable半semi半导体压力传感器semi-conductor pressure sensor半数字示值semi-digital indication半数字示值semi-digital read-out半数字显示模拟测量仪表analogue measuring instrument with semi-digital presentation 半图形板,半图解式面板semi-graphicpanel半自动操作semi-automatic operation帮助屏幕HELP screen棒式玻璃温度计solid-stem liquid in glass thermometer棒状图bar chart棒状图显示bar chart display包复式wrap-around包络envelope包装,套件package薄膜,膜片diaphragm保持retentive保持作用holding action保护protection保护动作值protection actuation value保护继电盘protective relay panel保温heat preservation保温柜thermal insulation cabinet保证期period of guarantee饱和(作用) saturation报警alarm报警窗alarm window报警动作值alarm actuation value报警汇总(概要)表alarm summary报警器(装置) annunciator报警设定alarm setting报警信息alarm message报警组件,报警单元alarm unit备品备件spare part备用standby备用寄存器standby register被(受)控controlled被(受)控(变)量controlled variable被(受)控系统controlled system被测(变)量measurand被测(变)量measured variable被测的measured被测量measured quantity(被测量的)变换值transformed value(of a measured quantity)本质安全防爆栅intrinsic safety barrier本质安全设备和接线intrinsically safe equipment and wiring本质安全型电动仪表和接线intrinsically safe electrical instrument and wiring本质的intrinsically比较元件comparing element比例带,比例范围proportional band比例调节(控制)器P controller=proportional controller比例调节器proportional controller比例调节作用proportional control action比例积分调节(控制)器PI-controller=proportional plus integral controller比例积分调节器proportional plus integral(reset) controller比例积分调节作用proportional plusintegral(reset) control action比例积分微分调节[控制]器PID controller=proportional plus integral plusderivation controller 比例积分微分调节器proportional plus integral(reset) plus derivative (rate) controller比例积分微分调节作用proportional plus integral(reset) plus derivative (rate)control action 比例积分微分作用PID-action=proportional plus integral plus derivation action比例积分微分作用proportional plus integral(reset) plus derivative (rate)action比例积分作用PI-action=proportional plus integral action比例积分作用proportional plus derivative(reset) action比例速度浮动调节(控制)器proportional speed floating controller比例微分调节(控制)器PD controller=proportional plus derivative controller比例微分调节器proportional plusderivative(rate) controller比例微分调节作用proportional plusderivative(rate) control action比例微分作用PD-action=proportionalproportional plus derivative(rate) action比例增益proportional gain比例作用P-action=proportional action比例作用proportional action比例作用系数proportional actioncoefficient比率ratio比率;微分rate比率调节(控制)器ratio controller比率调节(控制)系统ratio control system比特(二进制的一位) bit比值操作站ratio station比值设定ratio set笔;记录笔pen笔杆组件pen arm assembly笔移动组件pen movement assembly闭closed闭环closed loop闭环调节(控制) closed loop control闭环控制系统CCS=closed loop controlsystem闭环增益closed loop gain闭路(电视) closed circuit闭锁lockout必要系统required system编号number, tag number编码器encoder编译程序compiler编织铜线stranded copper(变)量variable变化率限值控制rate of change limitingcontrol变面积式流量测量仪表variable area flow measuring device变送器transmitter变送器架transmitter rack变速器speed variator标定尺寸normal size标度,比例scale(标度)基线scale mark base标度标记scale mark标度长度scale length标度范围scale range标度盘dial标度始(终)点值,最小(最大)标度值minimum(maximum) scale value 标度数字scale numbering标度因数scale factor标度值scale value标记sentinel标牌label标签tag标识号indentification number标志ID= identification标志号tag NO.标准standard标准草案draft standard标准化standardization标准化图形软件包standardized graphics package标准器etalon标准响应normalized response标准信号standard signal表、计meter表面密封型face seal type冰点ice point并行parallel并行,并联in parallel并行标记parallel designation并行存贮器parallel storage并行计算机parallel computer并行检索存贮器parallel search storage玻璃管水位计glass gage玻璃温度计liquid-in-glass thermometer玻璃纤维fibreglass波wave波登管压力传感器Burdon pressure sensor波登管压力元件Bourdon pressure element波列wave train波特(发讯速率单位) baud波特图Bode diagram波纹管(式) bellows铂platinum铂电阻platinum resistance bulb铂热电阻platinum RTD=platinumresistance temperature detector 补偿器compensator不带电,失励de-energized不可控加速作用uncontrolled acceleration不平衡unbalance不起作用(不工作) inoperative不停电电源系统UPS=uninterruptedpower supply system布置(图) layout部分辐射温度计partial radiation pyrometer C材料明细表bill of material采集acquisition采样sampling采样间隔sampling interval采样控制sampling control采样控制器sampling controller采样信号sampled signal采样周期sampling period采样作用sampling action参比(变)量,设定点set point参考(变)量reference variable参考标准(器)reference standard参考标准值reference-value standard参考负荷load reference参考工作条件,参比工作条件referenceoperating condition参考接地板earth reference plane参考信号,参比信号,标准信号reference signal参考性能,参比性能referenceperformance参数parameter残余偏转residual deflection操纵manipulate操纵(变)量manipulate variable操纵范围manipulate range操作operation(al)操作寄存器operation register操作台operating console操作员控制台operator console操作员请求控制台(盘,屏) operator'srequest control panel操作员站operator station操作站operating station操作站station操作指导显示operator guidance display草图sketch测点measurement point测定值,被测值measured value测量measurement测量measuring(测量)单位制system of unit(ofmeasurement)(测量)单位符号symbol of a unit ofmeasurement(测量的)导出单位derived unit(ofmeasurement)(测量的)倍数(分数)单位multiple (sub-multiple) of a unit (of measurement) (测量的)基本单位base unit (of measurement)(测量的)一贯单位coherent unit(of measurement)(测量的)制外单位out-of-system unit (ofmeasurement)测量的不确定度uncertainty ofmeasurement测量的权weight of measurement测量的再现性reproducibility ofmeasurement测量的重复性repeatability of measurement测量端measuring junction测量范围measuring range测量范围,有效范围effective range(测量范围)上限值higher measuring range value(测量范围)下限值lower measuring range value测量方法method of measurement测量结果result of measurement测量精度measured accuracy测量精确度accuracy of measurement测量链measuring chain测量设备measuring installation测量顺序measuring sequence测量误差error of measurement测量系统measuring system测量信号measured signal测量信号measuring signal(测量仪表的)零位zero (of a measuringinstrument)(测量仪表的)误差曲线error curve(of ameasuring instrument) (测量仪表的)修正曲线correction curve(of a measuring instrument) (测量仪表示值)误差error(of indicationof a measuring instrument) 测量硬件measurement hardware测量原理principle of measurement测量指示仪measurement indicator测量装置measuring apparatus测试程序testing procedure测温探针temperature probe插件板insert panel插头male plug插头板plugboard插线程序计算机wired program computer插针板pinboard差difference差differential差动变压器differential transformer差模干扰differential mode interference差拍beats差隙控制differential gap control差隙控制器,两位式调节器differential gap controller差压d/p差压differential pressure差压变送器d/p transmitter=differential pressure transmitter差压变送器differential pressure transmitter差压装置(仪表) differential pressuredevices(差压装置的)一次元件primary device(of a differential pressure device) 差值测量仪表differential measuringinstrument产品说明书PSS=Product SpecificationSheet产品应用资料PAD=product applicationdata sheet颤振dither常闭NC=normally closed常规routine常规[公用]系统common system常规操作conventional operation常规车间电气试验routine electrical shop test常规的conventional常开NO=normally open常数、系数constant长度length长格式标志long forma长径喷咀long radius nozzle(厂级)管理信息系统MIS=managementinformation system超差回用waiver超驰,超越override超驰控制override control超前lead超前/滞后lead/lag超前/滞后模件lead/lag module超声波acoustic emission超声波ultrasonic超声波(计量仪器) sonic type超声波电极清洗器ultrasonic electrodecleaner超声流量测量仪表ultrasonic flowmeasuring device超声物位测量仪表ultrasonic levelmeasuring device超速overspeed超限exceeding limit超越跳闸override trip称重传感器load cell成比例的proportional成分偏差变送器composition deviationtransmitter成组显示group display乘除器multiplier-divider程序programme=program(程序)转移jump程序寄存器program register程序控制programmed control程序控制盘(板,台) programming controlpanel程序控制器programmed controller程序控制器program controller程序设定操作站program set station程序员控制台programmer's console持续过限continuous overrange(overload)limit充电charge充灌式感温系统fill(ed) thermal system充气热系统gas filled thermal system充水银式感温系统mercury filled thermal system 充液式感温系统liquid filled thermalsystem冲击shock冲击电流surge current冲击压力surge pressure稠度变送器consistency transmitter初,工程engineering初样engineering model初样,初步开发样机conceptualdevelopment model 储能电容器energy storage capacitor触点contact触点容量contact rating触点输入组件contact sense module触发开关toggle switch触发器flip-flop触发器toggle触觉的tactile触摸屏幕(式) screen touching触屏touching screen触针stylus处理processing处理器processor穿管conduit穿管规格conduit format穿透penetration传感器,敏感元件sensor传感器;换能器transducer传输和贮存条件transportation and storage condition 传输延迟transport delay喘振,冲击surge串级cascade串级/付环设定cascade/secondary set串级调节(控制) cascade control串级调节器cascade controller串级控制系统cascade control system串级控制组件cascade control module串模,常态normal mode串模电压NMV=normal mode voltage串模电压series mode voltage串模干扰series mode interference串模干扰,常态干扰normal mode interference串模信号series mode signal串模抑制series mode rejection串模抑制,常态抑制normal moderejection串模抑制比series mode rejection ratio串行serial串行计算机serial computer吹气式压力检测bubble-tube pressuresensing device 吹扫purge磁magnetic(磁)带驱动器,(磁)带驱动装置tape drive磁场magnetic-field磁场干扰magnetic field interference磁存贮器magnetic storage磁带magnetic tape磁带盒cassette磁带馈送tape feed磁放大器magnetic amplifier磁鼓magnetic drum磁卡件magnetic card磁流量测量仪表magnetic flowmeasuring device磁盘disk磁盘magnetic disc磁盘驱动器disc drive磁通管magnetic flowtube磁心magnetic core磁性阻尼magnet damping磁阻reluctance次级标准器secondary standard次级基准点,次级参考点secondaryreference point 次要,二次的second次要可控损耗second controllable losses粗精控制系统coarse-fine control system存取时间access time存贮程序计算机stored program computer存贮寄存器storage register存贮器storage存贮器缓冲器storage buffer存贮设备(装置) storage device D打印机printer大屏幕显示large screen display大容量存贮器bulk storage memory带灯按钮backlighted pushbutton带电power-up带电,激励energized带宽band width带偏置自动—手动操作站A/M(automatic/manual)with bias station 带阻尼的resistance to带阻尼的电子变送器resistance toelectronic transmitter带阻尼的气动变送器resistance topneumatic transmitter代码转换器C/C=code converter单single单冲量single element单刀单掷SPST=single pole single throw单刀双掷SPDT=single pole double throw单端one leg单键翻页simple key paying单速无定位控制器single-speed floatingcontroller单速无定位作用single-speed floating action单位,单元,机组unit单位阶跃信号unit-step signal单位脉冲响应unit impulse response单位脉冲信号unit-impulse signal单位网络unit network单位网络的接口板unit network interfacecard单位斜坡信号unit-ramp signal单线图single line diagram单向脉冲列unidirectional pulse train单向性unilateral单元操作unit operation单元控制室UCR=unit control room单元控制室unit control room单座球阀single-ported globe valve弹簧常数spring constant挡板flapper导出量derived quantity导电率conductivity导则guide灯标,信(号)标beacon等级class等级指标class index等相线phase contours低的low(er)低低(极低) LL=low-low低电平low-level低电平脉冲low level pulse低范围值lower range-value低切换值lower switching value低值信号选择器low-signal selector地震效应seismic effects地址address递减,衰减subsidence递减比subsidence ratio点point点火器火焰存在/失去ignitor flame on/off点漂point drift点燃性incendivity(典型)接线图(typical) wiring diagram电electrical=electric电-气转换器electrical-pneumaticconverter电/气转换器I/P converter=electric to pneumatic converter电/气转换器electric to pneumatic converter电—磁electro-magnetic电—气阀门定位器eletro-pneumaticpositioner电厂保护系统PPS=plant protectionsystem电池后备单元battery backup unit电池快用完low battery电磁阀solenoid valve电磁干扰electromagnetic interference电磁干扰EMI=electric magneticinterference电磁流量计magnetic flowmeter电磁释放(安全阀) electromatic relief valve电磁执行机构solenoid actuator电导率变送器conductivity transmitter电导率记录仪conductivity recorder电导物(料,液)位测量仪表electricalconductance level measuring device 电动—液压执行机构electro-hydraulicactuator电动(阀)门MOV=motor operated valve电动阀motor operated valve电动门(机)控制中心MCC=motor control center电动势EMF电动势—电流变送器EMF to currenttransmitter电动势—气动变送器EMF to pneumatic transmitter电动执行机构electric actuator电化腐蚀,电蚀galvanic corrosion电极汽包水位计electrode drum levelguage电加热electrical heating电可编程只读存储器EPROM=electrically programmable read only memory电缆cable(电缆)穿墙保护through wall protection(电缆)刚性固定rigid fixing(电缆)汇接室/夹层s witch cabin(电缆)饶性slip fixing(电缆)走向系统raceway system电缆槽,电缆沟cable trough电缆的蛇形敷设snaking of cable电缆敷设设计routing design for cable电缆夹cable tie电缆夹层cable vault电缆桥架cable tray电缆清单cable list电缆通道cable passage电缆支架(总称) cable brackets电流current电流变送器CT=current transmitter电流的电子主控元件electronic controlling elements for current电路路径routing of wire电容capacitance电容测量仪表capacitance measurementinstrument电容器capacitor电容器存贮器capacitor storage电容物(料,液)位测量仪表electricalcapacitance level measuring device 电势potential电视TV=television电信号electrical signal电压voltage电压等级voltage level电压压力,敏感元件piezoelectricpressure sensor电源power supply, power source, electricpower, supply电源电压power voltage, supply voltage电源调节器supply regulator电源分配组件power distributioncomponent电源故障恢复电路supply faultrecovery circuit电源频率power frequency电源频率supply frequency电源系统图power system drawing电源消失loss of power电源装置power supply device电源子分配盘power sub-distributed panel电子electronic电子变送器,电动变送器electronictransmitter电子调节器,电动调节器electroniccontroller电子设备间electronic equipment room电子式仪表electronic instrument电子指示仪,电动指示仪electronicindicator电阻加热器resistance heater电阻应变计strain gauge蝶阀butterfly valve定标,分度graduation定货联系单;工艺卡WS=Work Sheet定时顺序控制time-oriented sequentialcontrol定位控制系统positioning control system定位器positioner定义固定点defining fixed points定值调节(控制) control with fixed set point定值器set point generator订货单号purchase order number动力电缆power cable动态dynamic动态补偿器dynamic compensator动态测量dynamic measurement动态范围dynamic range动态显示dynamic representation动态响应dynamic response动态增益dynamic gain动作偏差信号actuating error signal抖动chatter独立的independent独立线性度independent linearity独立一致性independent conformity读数误差reading error读写检验指示器read write check indicator堵塞clogging镀金浮式触点gold-plated floating contact镀锌的galvanized度degree度量单位unit of measurement端差温度计算terminal temperaturedifference calculation 端基线性度terminal-based linearity端基一致性terminal-based conformity端子terminal端子排terminal block短路short circuit短期购买号订货short purchase order NO.短时过范围极限overrange(overload)limitof short duration断点开关,折点开关breakpoint switch断开能力interrupting capability断路漏电off-state leakage对比度contrast对数logarithm对数增益logarithmic gain多multi多笔记录仪multiple-pen recorder多变量(多冲量)控制系multi-variable(multi-element) control system 多处理机multi-processor多窗口multi-window多的multiple多点记录仪multi-point recorder多点记录仪multiple-channel recorder多点指示仪multiple-channel indicator多股(芯)电缆multi-conductor cable多股导线multi-conductor多阶滞后multi-order lag多路传输multiplexing多路转换器multiplexer多速无定位控制器multiple-speed floating controller多速无定位作用multiple-speed floating action多通道multi-channel多位(步)控制器multi-step controller多位(步)作用multi-step action多位式控制器,多位式调节器multi-position controller多针指示仪multiple-pointer indicator多柱(角)连接插头multi-pin connector E额定精确度accuracy rating额定值rated value额定值rating二two二次的secondary二次回路secondary loop二极管diode二级存贮器,辅助存储器secondarystorage二阶微分作用second derivative action二阶微分作用,D2—作用D2-action二阶滞后second-order lag二进制binary二进制编码的十进制BCD=binary coded decimal二进制代码binary code二进制卡件binary card二进制控制(两位控制) binary control二进制信号(两位信号) binary signal二位控制器,二位调节器two-step controller二位式调节(控制)器two-position controller二线制two wire F发光二极管LED=light emitting diode阀valve阀杆valve stem阀门定位器valve positioner阀位信号valve position signal法制计量学length metrology反的reverse反馈feedback反馈回路feedback loop反馈控制(调节) feedback control反馈通路feedback path反馈信号feedback signal反馈元件feedback elements反向开关reversing switch反向设定reverse construction反应曲线reaction curve反作用reverse action反作用控制器reverse acting controller反作用执行机构reverse acting actuator返回return返回传递函数return transfer function返回信号return signal范围range范围负迁移elevated range范围上限upper range-limit范围上限值upper range-value范围下限lower range-limit方波square wave方式mode防anti, tight防爆explosion-proof防尘dust-tight防冻anti-freeze, freezing protection防腐corrosion-resistant, corrosionpreventative 防护等级degree of protection防火/探测系统fire-protection/detectionsystem 防火(阻燃)设计fire-retardant design防火电缆fire resistance cable防火枕fire protection pillows防溅drip-tight防进水protection of water induction防凝结anti-condensation防水water-tight ,water proof防锈rust protection防止炉膛防爆prevention of furnace explosion仿真机simulator放大amplification放大器amplifier非non非保持nonretentive非隔离模拟量输入non-isolated analogue input非可燃性设备non-incentive equipment非线性non-linear非线性标度non-linear scale非线性控制器(非线性调节器) non-linear controller 非线性失真non-linear distortion非易失(存储器) non-volatile非周期阻尼aperiodic damping分贝decibel分辨能力,分辨率resolution分部件,分组件subassembly分格scale division分格间距length of a scale division, scale spacing 分格值,格值scale interval, value of scale division 分管接头、堵头pipe tap分级结构hierarchical structure分界点terminal point(分类的)危险场所hazardous(classified) location分散控制系统DCS=distributed controlsystem分时time sharing分时比例控制器time proportioning controller分时程序time programme分时控制time shared control分析仪表analytical instrument分析仪电子装置analyzer electronicassembly分支管branch line封闭式仪表保护柜instrument enclosedcabinet蜂鸣器horn峰值spike风机导叶驱动控制fan pitch drive control风量,气量air flow rate辐射radiation辐射高温计radiation pyrometer辐射热计bolometer辐射温度计radiant-energy thermometer, radiation thermometer幅值amplitude幅值轨迹amplitude locus幅值失真amplitude distortion符号symbol符号语言symbol language浮float(ing)浮标和缆索式物位测量仪表float and cable level measuring device 浮点作用控制control floating action浮空输出floating output浮空输入floating input浮力沉筒式液位变送器buoyancydisplacer level transmitter浮力式液位测量仪表buoyancy levelmeasuring device辅盘auxiliary panel辅助auxiliary辅助(备用)存贮器auxiliary storage辅助并行标记sub-parallel辅助规范AS=auxiliary specifications辅助回路auxiliary loop辅助继电器auxiliary relay辅助控制台auxiliary console辅助系统开环控制(回路) auxiliarysystem open loop control辅助装置(仪表) auxiliary device腐蚀corrosion复complex复变量complex variable复合composite复合图composite drawing复合作用composite action复平面complex plan复位reset(负)迁移,(提升) elevation负荷load throw off负荷闭锁load block负荷调度中心load dispatching center负荷率load rate负荷面load face负载,负荷load负载调整load regulation负载匹配load matching负载阻抗load impedance附属硬件accessory hardware G干dry干/湿盘dry/wet panel干接点信号dry contact signal干摩擦dry friction干扰disturbance干预intervention干燥剂desiccant感温电缆temperature sensing cable感应电路inductive circuit杠杆组件lever assembly高high,upper高/低信号选择器auctioneering device高/低值upper and lower value高低值选择器high-low selector高低值作用high-low action高高(极高) HH=high-high高速打印机high-speed printer高速阅读器high-speed reader高信号选择器high-signal selector高阻抗模块HI-Z module格式format隔爆外壳,防火外壳flameproofenclosure隔离模拟量输入isolated analogue input隔膜阀diaphragm valve根阀root valve跟踪track跟踪校准calibration traceability更新update更新时间update time工程单位engineering unit工程师工作站EWS=engineer workingstation工程师站室EWS room工业industrial工艺过程industrial processmeasurement and工业用计算机industrial computer工业自动化仪表,工业过程检测控制仪表industrial process measurement andcontrol instrument工艺适用性process fluid compatibility工作service工作,操作operating工作比duty factor工作比控制系统duty factor control system工作标准器working standard工作调节器service regulator工作寿命service life工作条件,工况operating condition工作条件影响operating influence工作循环duty cycle工作压力operating pressure工作站workstation攻螺纹,攻丝tapping功率power功率因数power factor(功能)独立性independence功能function(功能,物理上)分隔开segregate功能板测试延伸器,卡件测试延伸板card test extender 功能板卡件测试模件card test module功能键function key功能卡(件) function card功能框,功能块functional block功能链function chain功能逻辑图functional logic diagram功能组function group功能组控制级function group control level供气(汽,水)能力pneumatic delivery capability供气压力supply pressure公称值nominal value公司产品规范CPS=corporate productspecifications公司技术标准CES=corporate engineering standards汞接继电器,水银继电器mercury-wetted relay共模common mode共模电压common mode voltage共模干扰common mode interference共模信号common mode signal共模抑制common mode rejection共模抑制比common mode rejection ratio构件structural hardware古典文丘里管classical Venturi tube故障failure故障fault故障关FC=fail close故障开FO=fail open故障时间downtime故障诊断(排除)方法trouble shootingmethod固定fix(ed)/)(ing)固定标度测量仪表moving index measuring instrument 固定程序计算机fixed program computer固定存贮器fixed storage固定点fixed point固态solid state固态件firmware固态逻辑solid state logic固态逻辑组件solid-state logic card固态元件solid-state component固有inherent挂牌tag attachment关键系统vital system观察误差error of observation管理(监视)控制supervisory control罐笼式cage type灌注阀fill valve光笔light pen光标cursor光盘optical disc光谱温度计spectral pyrometer光纤电缆fibre-optic cable光学制板photocomposition engraving规程、规范、代码code规范号SPEC. NO=specification number锅炉跟踪boiler-follow锅炉炉膛安全监控系统FSSS= furnacesafetyguard supervisory system 国际标准(器) internationalstandard国际单位制international system of unit(SI)国际的international国际防护代码IP code=internationalprotection code国家标准(器) national standard过over过程,处理,工艺process过程(控制)计算机process computer过程测量process measurement过程管理和控制PMC=processmanagement and control过程开关process switch过程控制process control过程控制工程师控制台process engineer's console过程控制机算机process control computer过程设备process equipment过程数据process data过程顺序控制process-oriented sequential control过程温度process temperature过程压力process pressure过冲;超调量over shoot过冲;瞬态超调transient overshoot过范围overrange过范围极限overrange limit过滤片disc screen过热器减温喷水控制[调节]阀desuperheating spray control valve 过压的pressurized过压外壳pressurized enclosure过压型电动仪表pressurized electrical instrument过载overloading过载,过负荷overload过载限,过负荷极限overload limit过阻尼overdamping H函数发生器function generator函数卡(件) signal characterizer card焊接的welded毫安mA=milliamps耗电量electrical power consumption耗气量air consumption合格证书certificate of conformity黑白black-white横截面cross-section横向干扰transverse interference虹吸管syphon=siphon后备(备用) back-up后进先出LIFO=last in, first out弧形arc互连interconnection户外outdoor户外场所outdoor location户外区(D级) outdoor area (class D)滑板pad滑压sliding pressure画面graphic画面动态数据更新graphic dynamicinformation update划分split环秤压力计ring balance manometer环境environmental, ambient环境区域environmental area环境区域,环境场所environmentallocation环境条件environmental condition环境温度ambient temperature环境误差environmental error环境压力ambient pressure环境影响environmental influence缓冲存贮器buffer storage缓冲器snubber缓冲器,阻尼buffer回差hysteresis error回路;环loop回路传递函数loop transfer function回路图loop diagram回路相角loop phase angle回路相位特性loop phase characteristic回路增益loop gain回路增益特性loop gain characteristic回跳backlash汇总盒summing box绘图机plotter混合计算机hybrid computer混合老炼burn-in mix活动标度测量仪表moving scale measuring instrument活区live zone活塞式piston活塞压力计dead weight tester活塞执行机构piston actuator火焰flame火焰扫描器flame scanner火焰探测flame detection火焰探测器flame detector火灾报警fire alarm J击穿电压试验,耐压强度试验breakdown voltage testing基本base基本的intrinsic基本控制器单元BCU=base controllerunit基本量base quantity基本误差intrinsic error基本误差限limit of intrinsic error基地式差压流量变送器,内孔板式差压流量变送器integral flow orifice differential pressure transmitter基地式调节仪local pneumatic controller基值fiducial value基准,参数,基准端reference基准结reference junction基准结补偿,冷端补偿reference junction compensation基准精确度reference accuracy基准输入信号reference-input signal基准输入元件reference-input element基准误差datum error机架,机柜rack机炉协调控制coordinated boiler-turbine control机器machine机器检查指示仪machine checkindicator机算机光学排版computerphotocomposition机械mechanical机械冲击mechanical shock机械零位(点) mechanical zero机械零位调整器mechanical zero adjuster机械液压式控制MHC=mechanical hydraulic control机翼测量装置air foil机组控制级unit control level机组启动/停止控制系统unit start-up/shut-down control system 积分integrate积分的integral积分调节(控制)器,再调调节(控制)器reset controller积分调节作用reset control action积分控制(调节)器I controller=integral controller积分控制器(积分调节器) integral controller积分控制作用integral control action积分器integrator积分速率integral action rate积分作用,I—作用I-action=integral action积分作用时间常数integral action time constant积分作用系数integral action coefficient积分作用限制器integral action limiter积算仪integrating instrument积算仪表integrating meter激发stimulus激光(打印机) laser激励excitation奇偶校验parity check奇偶校验误差parity error极点绘图polar plot极限,裕度margin极限工作条件,运行极限operative limits极限值ultimate value集中控制模式central control mode技术规范,技术条件,说明书specification技术工作请求书EAR=Engineering Action Request技术说明书ED=engineering description技术文件发放EDR=engineeringdocumentation release技术专长technical know-how技术资料TI=Technical Information寄存器register计量标准measurement standard计量学metrology计器,仪表,表gauge计时器(定时器) timer计数counting计数器counter计算calculation计算(动词) computing计算操作站computing station计算机computer计算机辅助设计CAD=computer aided design计算机辅助现场管理computer aided site management计算机柜computer cabinet计算机和计算硬件computer andcomputing hardware 计算机接口操作站computer interface station计算机设定操作站computer set station计算机语言computer language计算机中心处理单元(主机)CPU=central processing unit计算机自动—手动操作站computerauto-manual station 计算继电器computing relay计算能力(容量) calculation capacity计算器,计算仪表computing instrument计算书calculation sheets计算装置computing unit记录recording记录/报警控制台log/alarm console记录笔稳定性pen stiffness记录笔行程pen travel记录笔压力pen loading记录笔张力pen tension记录介质,记录纸recording medium记录器logger记录仪recorder记录仪表recording instrument记录纸chart记录纸驱动机构chart driving mechanism记录装置recording device记录装置,压印器marking device继电保护relay protection继电器relay继电器逻辑卡(件)relay logic card夹角angle夹具jig加法器adder加法器summer加减器adder-subtractor加权函数weighting function加权平均weight average加权平均值weighted mean加权系数weight factor加速度响应acceleration response加压密封pressure seal加载;配置loading假设(值) assumption价目单PS=Price Sheet架装仪表rack mounted instrument监督supervision监视monitoring监视的supervisory监视控制和数据采集系统SCADA=supervisory control and dataacquisition 监视器monitor监视硬件monitoring hardware间隔时钟(数字式)interval timer(digital)间接indirectly间接被控(变)量indirectly controlled variable间接被控系统indirectly controlled system间接作用式测量仪表indirect acting measuring instrument间隙调节器,间隙控制器gap action controller间隙自动控制系统GAC=gap automaticcontrol system兼容性compatibility检测(探测)detect检测仪表,显示仪表measuring instrument检查清单check list检出器,检测器detector检出器,敏感元件detecting device ,sensing element检索设备retrieval facility检验inspection检验寄存器check register简图elementary diagram减法subtraction减法器subtracter=subtractor减负荷deload鉴别discrimination鉴别阈(限度)discrimination threshold键盘keyboard键盘发送/接收keyboard send/receive键盘发送/接收装置KSR=keyboard send/receive。
DS18B20数字温度计外文资料翻译要点

南京理工大学毕业设计(论文)外文资料翻译学院(系):专业:机电一体化工程姓名:学号:外文出处:from internet附件: 1.外文资料翻译译文;2.外文原文。
指导教师评语:该外文资料贴近本次毕业设计主题,有一定的权威性,翻译的较全面,符合外文资料翻译要求。
签名:2014 年 5 月附件1:外文资料翻译译文DS18B20 数字温度计描述DS18B20 数字温度计提供9至12位温度读数,指示器件的温度。
信息经过单线接口送入DS18B20或送出,因此从中央处理器到DS18B20仅需连接一条(和地)。
读、写和完成温度变换所需的电源可以有数据线本身提供,而不需要外部电源。
因为每一个DS18B20有唯一的系列号,因此多个DS18B20可以存在于同一条单线总线上。
这允许在许多不同的地方放置温度灵敏器件。
此特性的应用范围包括HVAC环境控制,建筑物、设备或机械内的温度检测,以及过程监视和控制中的温度检测。
特性独特的单线接口,只需一个接口引脚即可通信。
多点能力使分布式温度检测应用得以简化。
不需要外部元件。
可用数据线供电,提供3.0V到5.5V的电源。
不需备份电源。
测量范围从-55°C 到+125°C,等效的华氏温标范围是-67°F 到+257°F以9到12位数字值方式读出温度。
在750毫秒内把12位温度变换为数字。
用户可定义的,非易失性的温度警告设置。
告警搜索命令识别和寻址温度在编定的极限之外的器件(温度告警情况)。
应用范围包括恒温控制,工业系统,消费类产品,温度计或任何热敏系统。
引脚排列引脚说明GND –地DQ –数字输入输出VDD –可选的VDDNC –不连接详细引脚说明综述图1的方框图表示DS18B20的主要部件。
DS18B20有三个主要的数据部件:1)64为激光ROM,2)温度灵敏元件,3)非易失性温度告警触发器TH和TL。
器件从单线的通信线取得其电源,在信号线为高电平的时间周期内,把能量贮存在内部的电容器中,在单信号线为低电平的时间期内断开此电源,直到信号线变为高电平重新接上寄生(电容)电源为止,作为另一种可供选择的方法,DS18B20也用外部5V电源供电。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
中英文对照外文翻译(文档含英文原文和中文翻译)中英文资料对照外文翻译TT302 温度变送器概述TT302温度变送器接收毫伏(mV)输出的信号,这类传感器包括热电偶或阻性传感器,例如:热电阻(RTD)。
它所接受的信号必须在允许的输入范围之内。
允许输入电压范围为-50到500,电阻范围为0到2000欧姆。
功能描述-硬件每个板的功能介绍如下:图2.1 TT302-硬件构成方框图多路转换器多路转换器将变送器端子接到相应信号调理板上,以保证在正确的端子上测量电压。
信号调理板他的作用给输入信号提供一个正确的值以满足A/D转换。
A/D转换器A/D转换器将输入信号转换成数字形式传给CPU。
信号隔离他的作用在输入和CPU之间隔离控制信号和数字信号。
中央处理单元(CPU)RAM PROM和EEPROMCPU是变送器的智能部分,主要完成测量,板的执行,自诊断和通信的管理和运行。
系统程序存储在PROM中。
RAM用于暂时存放运算数据。
在RAM中存放的数据一旦断电立即消失,所以数据必须保存在不易丢失的EEPROM中。
例如:标定,块的标识和组态等数据。
通信控制器监视在线动态,调整通信信号,插入,删除预处理,滤波。
电源变送器电路通过现场总线电源供电。
电源隔离像信号隔离一样,供给输入部分的信号必须要隔离,电源隔离采用变压器将直流供电电源转换成高频交流供电。
显示控制器从CPU接收数据送给LCD显示器的显示部分,此时显示器必须处于打开状态。
本机调整它有两个磁性驱动开关,它们必须由磁性工具来驱动而不是机械或电的接触。
图2.2-LCD指示器温度传感器TT302像前面所描述的那样,可以兼容多种类型的传感器。
TT302为使用热电偶或热电阻RTD 测量温度进行了特殊设计。
此类传感器的基本内容如下所述:热电偶热电偶由两种不同的金属或合金在一端连接在一起所组成的,被称为测量端或热端。
测量端必须放在测量点上,热电偶的另一端是打开的连接在温度变送器上,这一端称做参考端或冷端。
在大多数应用中,塞贝克效应可以充分解释热电偶的工作原理。
热电偶是如何工作的(塞贝克效应)当金属丝的两端有温差时,在金属丝的没一端都会产生一个小的电动势,这种现象就叫做塞贝克效应。
当两种不同金属丝连接在一起,而另一端开放时,两端之间的温差将会产生一个电压输出。
现在,有两个重要的问题需要注意:首先,热电偶所产生的电压与测量端和冷端的温度成比例,因此,为了得到被测温度必须加上参考端的温度,被称做冷端温度补偿。
TT302可以自动进行补偿。
为此,在TT302传感器端子装有一个温度传感器。
其次,如果热电偶与变送器端子之间的导线没有采用与热电偶相同的导线(例如:由热电偶传感器或接线盒到变送器端子之间采用铜线)那么就会对温度测量产生影响,因此必须要进行冷端补偿。
热电偶的电势在冷端温度为0℃时与热端温度的关系用热电偶分度表来表示。
分度表存储在TT302的存储器中,他们是国际标准NBS(B,E,J,K,N,R,S,T)和德国工业标准DIN(L,U) 热电阻(RTD)热电阻通常被称做RTD,它的工作原理是金属的阻抗会随着温度的升高而增加,存储在TT302的中的热电阻分度表有日本工业标准JIS[1604-81] (Pt50,Pt100)。
国际电工委员会IEC,DIN,JIS[1604-89] (Pt50,Pt100&Pt500),通用电气公司GE(Cu10)和DIN(Ni120)。
为使热电阻能够正确测量温度,必须消除传感器到测量电路之间线路电阻所造成的影响。
在一些工业应用中,这些导线有几百米长,在环境温度变化剧烈的场所,消除线路电阻的影响是极为重要的。
TT302允许二线制连接,但可能会引起测量误差。
此误差取决于接线的长度和导线经过处的温度(图2.3二线制连接)在二线制连接中,电压U2与热电阻的阻值R TD和导线的电阻R成正比U2=(R TD+2R X I图2.3二线制连接为了避免导线电阻的影响,推荐用三线制连接(图2.4三线制连接)或四线制连接(图2.5三线制连接)在三线制连接中,端子3是高阻抗输入端,因此,没有电流流过该导线,此导线上也没有压降。
电压U2-U1与电阻无关,因为导线电阻上的电压被抵消掉了,它仅与R TD的电阻有关。
U2-U1=(R TD+R)X I-RxI=R TDx I图2.4 三线制连接在四线制连接中,端子2和端子3是高阻抗输入端,因此,没有电流流过此端,也没有压降产生。
另外两根导线的电阻可不予考虑,这两根导线上也没有测量点,因此电压U2只与R TD电阻值有关U2=R TDx I图2.5四线制连接双通道连接和二线制连接相似,也存在相同的问题(图2.6双通道连接)导线的电阻需要测量,而且在同一温度下测量也不能忽略他们的阻值,因为长度也会影响使它们不同。
图2.6双通道连接西门子SIMATIC PCS 7 PS 展望投资成本低标准化的系统基于标准化的部件,因此有高度的挠性和可变性。
由于标准化技术的使用使其具有开放性运行和维护成本低全自动化具有电厂设备所需的控制系统的特殊功能和部件顾客利益与设备的适应性强可根据电厂的规模和特性进行扩展和改变可改变它的性能和记忆功能由一个服务器来实现从单一控制到分散控制具备电厂所需的特殊运行,监视,诊断和过程接口回顾自1997年投入市场截止到2002年8月100﹪的销售率在30多个国家投入使用控制领域:工业发电厂生物发电厂电厂单元机组的辅机成功的原因全自动化功率方案库的使用将SIMATIC PCS 7的兼容性增强创新性应用国际公认标准为控制和HMI提供一种开放系统服务范围无论何时何地都可得到全球范围内的服务经验在工程和节约时间方面提供高质量的规划,管理和方案技术认证过热器与再热器过热器是一种将热量传给饱和蒸汽以提高其温度的换热器。
蒸汽过热是中心电站所采用的设计特点之一,过热增加了整体循环效率。
另外,它降低了汽轮机末级叶片的湿度,因此提高了汽机的内在效率。
一般而言,过热器可分为辐射式过热器、对流式过热器或联合式过热器,这取决于热量是怎样从烟气传给蒸汽的。
这些过热器具有不同的运行特性,在机组负荷的宽范围内如能保持出口汽温不变,这样的特性是最希望的。
当出口汽温变得过高,则会引起过热器因部分过热而失效。
对流过热器位于炉膛出口,或能够从燃烧的高温产物吸收热能的区域。
对流过热器常常通过一束水冷管来遮蔽炉膛辐射热。
当这些管子留有足够的间隔时,也能遮断渣粒而减少过热器上的结渣问题。
在大型蒸汽发生器系统中,对流过热器常常分为两部分:一级过热器和二级过热器。
饱和蒸汽首先进入一级过热器而接受初始过热,一级过热器为于相对低的烟温区,在部分过热后,蒸汽进到二级过热器而完成其过热过程。
使过热器分为两级的主要原因是为蒸汽再热器提供一个空间,使烟气向蒸汽有效传热。
辐射过热器没有对流过热器那样得到普遍使用。
当需要辐射过热器时,它通常位于炉膛壁上代替一端水冷管。
另一种布置是使辐射过热器刚好在屏式管后面,辐射过热器是二级过热器的中间部分。
中心电站锅炉提供蒸汽再热。
再热器一般是对流式,且通常位于一级与二级过热器之间的空间。
当蒸汽温度在汽机中部分膨胀后,它返回锅炉再热。
离开再热器的蒸汽温度通常等于过热蒸汽温度。
因为再热器的设计在运行本质上与过热器一样,过热器的讨论将同样适用于再热器。
在过热器的热力设计中,首先确定蒸汽温度。
一般而言这点在电站系统设计中完成,以平衡电站初始费用和服役期运行费用。
近年来,对于所有蒸汽发生器系统,最佳蒸汽温度约538℃。
热力设计中的第二步是近似确定所要求的过热器面积数量。
在过热器表面积被确定后,下一步要考虑的是选择管子的长度、管径和管子数。
显然,选择是一个反复的过程,先产生一个尝试解,查看其各种约束是否满足,从各种可接受解中找到最优解。
最佳过热器应该有给予设计汽温所必需的足够的传热表面。
管子参数(长度和直径)使得蒸汽压降和管子金属温度将不超过设计值。
管子金属温度是一个重要参数,对管子材料的选择有很大影响。
另外,最佳过热器要使管子布置得使所产生的灰和渣最少。
现代过热器有许多管子通道,管子都顺排布置而不用错排布置。
管子通常是圆管,外径为5或6.3cm。
没有附在管子上的扩展表面(如肋片),材料的选择取决于蒸汽温度和压力。
碳钢的允许温度达430℃,常常用于低温过热器。
铬-钼钢、不锈钢或某种类似的耐热合金能承受高达650℃的温度,因而它们被选做高温区过热器。
温度调节与控制对过热器与再热器都很重要,蒸汽温度调节常常要在锅炉指定的时间内进行,原则方法是增加或减少传热面积。
蒸汽温度也可以通过调节热烟气温度和质量流量来实现。
一般而言,这些都是通过改变过量空气或者蒸发段效果来完成。
在锅炉运行中,有许多因素影响离开过热器和再热器的蒸汽温度,它们包括锅炉负荷、过量空气、给水温度和受热面的清洁度。
运行中蒸汽温度的控制必须在不改变设备布置的情况下完成,最有效的措施包括:烟气旁路,燃烧器控制,温度调节,烟气再循环,过量空气以及分隔炉膛。
烟气旁路是控制烟气流过过热器的流量,这种方法是主要缺点是高温区可动闸板操作运行困难,且对负荷变化响应慢。
燃烧器控制通常是控制火焰位置和燃烧速度,使燃烧器倾斜可以使火焰指向或离开过热器,这将改变炉膛的吸热和过热器的烟气温度。
随着锅炉负荷减小,燃烧器将逐一推出运行,这将改变燃烧速度,从而改变流经过热器的烟气流量。
温度调节是常使用的方法之一,温度调节器通常位于一级和二级过热器之间。
有两种基本形式的温度调节器:一种是管式,一部分过热蒸汽通过换热器管道,将热量传给锅炉水(可以是锅炉给水或锅炉汽包水),随后进入温度调节,从一级过热器分开的蒸汽将会合,一起进入二级过热器;第二种温度调节器是将给水喷入过热蒸汽流中。
给水蒸发使蒸汽温度降低,控制给水量就可以控制蒸汽温度。
必须注意要使喷水足够纯净,喷水要和过热蒸汽很好地混合,从而使得第二级过热器的入口没有水滴。
烟气再循环通常采用改变炉膛和过热器的吸收率来控制蒸汽温度,当需要蒸汽温度声高时,从省煤器出口取出的一部分烟气将循环返回炉膛底部。
因此,炉膛温度降低,导致炉膛吸热减少,而炉膛出口烟温升高。
这么高的烟温,加上烟气流量增加,将增加过热器的传热速率,使蒸汽出口温度升高。
温度控制也受所使用的过量空气量的影响,过量空气越多,蒸汽出口温度将越高,其原因与烟气再循环方法的原因类似。
必须指出,太多的过量空气将导致锅炉燃烧效率降低。
分隔炉膛锅炉是将饱和蒸汽的生产安排在一段,而将过热蒸汽的生产安排在另一段。
过热汽温是通过控制两个炉膛中的燃烧速率来调节的,这一方法不经济,很少应用中心电站锅炉。
译文:TT302—Field bus Temperature TransmitterOperationThe TT302 accepts signals from mV generators such as thermocouples or resistive sensors such asRTDs. The criterion is that the signal is within the range of the input. For mV, the range is -50 to 500mV and for resistance, 0-2000 Ohm.Functional Description – HardwareThe function of each block is described below.Figure 2.1—TT302Block DiagramMUX MultiplexerThe MUX multiplexes the sensor terminals to the signal conditioning section ensuring that the voltages are measured between the correct terminals.Signal ConditionerIts function is to apply the correct gain to the input signals to make them suit the A/D -converter. A/D ConverterThe A/D converts the input signal to a digital format for the CPU.Signal IsolationIts function is to isolate the control and data signal between the input and the CPU.(CPU) Central Processing Unit, RAM, PROM and EEPROMThe CPU is the intelligent portion of the transmitter, being responsible for the management and operation of measurement, block execution, self-diagnostics and communication. The program is stored in a PROM. For temporary storage of data there is a RAM. The data in the RAM is lost if the power is switched off. However there is a nonvolatile EEPROM where data that must be retained is stored. Examples, of such data are trim, calibration, block configuration and identification data.TT302 - Fieldbus Temperature TransmitterCommunication ControllerIt monitors line activity, modulates and demodulates communication signals and inserts and deletes start and end delimiters.Power SupplyTakes power of the loop-line to power the transmitter circuitry.Power IsolationJust like the signals to and from the input section, the power to the input section must be isolated. Isolation is achieved by converting the DC supply into a high frequency AC supply and galvanically separating it using a transformer.Display ControllerReceives data from the CPU informing which segments of the Liquid Crystal Display, should be turned on.Local AdjustmentThere are two switches that are magnetically activated. They can be activated by the magnetic tool without mechanical or electrical contact.Figure 2.2 - LCD IndicatorTemperature SensorsThe TT302, as previously explained, accepts several types of sensors. The TT302 is specially designed for temperature measurement using thermocouples or Resistive Temperature Detectors (RTDs).Some basic concepts about these sensors are presented below.ThermocouplesThermocouples are constructed with two wires made from different metals or alloys joined at one end, called measuring junction or "hot junction". The measuring junction should be placed at the point of measurement. The other end of the thermocouple is open and connected to the temperaturetransmitter. This point is called reference junction or cold junction.For most applications, the Seebeck effect is sufficient to explain thermocouple behavior as following:How the Thermocouple Works (Seebeck Effect)When there is a temperature difference along a metal wire, a small electric potential, unique to every alloy, will occur. This phenomenon is called Seebeck effect. When two wires of dissimilar metals are joined at one end, and left open at the other, a temperature difference between the twoends will result in a voltage since the potentials generated by the dissimilar materials are different and do not cancel each other out. Now, two important things must be noted. First: the voltage generated by the thermocouple is proportional to the difference between the measuring-junction and the cold junction temperatures. Therefore the temperature at the reference junction must be added to the temperature derived from the thermocouple output, in order to find the temperature measured. This is called cold junction compensation, and is done automatically by the TT302, which has a temperature sensor at the sensor terminals for this purpose. Secondly, if the thermocouple wires are not used, all the way to the terminals of the transmitter (e.g., copper wire is used from sensor-head or marshaling box) will form new junctions with additional Seebeck effects. It will be created and ruin the measurement in most cases, since the cold-junction compensation will be done at the wrong point.NOTEThe relation between the measuring junction temperature and the generated mili-voltage is tabulated in thermocouple calibration tables for standardized thermocouple types, the reference temperature being 0 oC.Standardized thermocouples that are commercially used, whose tables are stored in the memory of the TT302, are the following:. NBS (B, E, J, K, N, R, S & T). DIN (L & U)Resistive Temperature Detectors (RTDs)Resistance Temperature Detectors, most commonly known as RTD’s, are based on the principle that the resistance of metal increases as its temperature increases. Standardized RTDs, whose tables are stored in the memory of the TT302, are the following:. JIS [1604-81] (Pt50 & Pt100). IEC, DIN, JIS [1604-89] (Pt50, Pt100 & Pt500).. GE (Cu10).. DIN (Ni120)For correct measurement of RTD temperature, it is necessary to eliminate the effect of the resistance of the wires connecting the sensor to the measuring circuit. In some industrial applications, these wires may be hundreds of meters long. This is particularly important at locations where the ambient temperature changes constantly.The TT302 permits a 2-wire connection that may cause measuring errors, depending on the length of connection wires and on the temperature to which they are exposed. (See Figure 2.3 -Two-Wire Connection).In a 2-wire connection, the voltage V2 is proportional to the RTD resistance plus the resistance of the wires.V2 = [RTD + 2 x R] x IFigure 2.3 - Two-Wire ConnectionIn order to avoid the resistance effect of the connection wires, it is recommended to use a 3-wire connection (See Figure 2.4 – Three-Wire Connection) or a 4-wire connection (See Figure 2.5 - Four - Wire Connection).In a 3-wire connection, terminal 3 is a high impedance input. Thus, no current flows through that wire and no voltage drop is caused. The voltage V2-V1 is independent of the wire resistances since they will be cancelled, and is directly proportional to the RTD resistance alone.V2-V1 =[RTD + R] x I - R x I = R TD x IFigure 2.4 - Three – Wire ConnectionIn a 4-wire connection, terminals 2 and 3 are high impedance inputs. Thus, no current flows through those wires and no voltage drop is caused. The resistance of the other two wires is not of interest, since there is no measurement registered on them. Hence the voltage V2 is directly proportional to the RTD resistance.(V2 = RTD x I)Figure 2.5 - Four - Wire ConnectionA differential or dual channel connection is similar to the two-wire connection and gives the same problem (See Figure 2.6 - Differential or Dual Connection). The resistance of the wires will be measured and do not cancel each other out in a temperature measurement, since linearization will affect them differently.Figure 2.6 - Differential or Dual ConnectionSIEMENSHighlight of SIMATIC PCS 7 PSLow investment costs.Modular system based on standard components, therefore high degree of flexibility and scalability..Open thanks to the use of standard technologies.Low operation and maintenance costs.Horizontal integration with Totally Integrated Au tomation..Control system specific functionality and components for power plant requirements.Customer Profits.Optimum adaptation to the requirements..Expansion and adaptations according to size and plant characteristic. .Scalable performances and memories for control..Scalable from single station to distributed control system with client-server architecture..Power-plant-specific operation and monitoring,diagnostics and process interface.Facts& Figures of Simatic PCS7 PSThe Scope.On the market since 1997..100 sold to date (as of 08/2002)..In use in more than 30 countries..In control of:Industrial power plantsBiomass power plantsAuxiliaries of power plantsReasons behind this success.Totally Integrated Au tomation:Consistent use of SIMATIC PCS7 with Power Solution Library.Innovation Nature:We provide an open system using international recognized standards for control and HMI.Competence:Worldwide services which are available for you anytime, anywhere! .Experience:Project management and process know-how guarantee for high quality in project engineering and saving time.Superheater and ReheaterThe superheater is a heat exchanger in which heat is transferred to the saturated steam to increase its temperature. Stream superheating is one of the design features accepted in central electric power stations. Superheating raise overall cycle efficiency. In addition, it reduces a moisture level in the last stages of the steam turbine and thus increases the turbine internal efficiency.Superheaters are commonly classified as either radiant superheaters, convective superheaters, or combined superheaters, depending on how heat idtransferred from the gases to steam. These superheaters have different performance characteristics. The feature that the outlet steam temperature can stay essentially constant over a wide range of unit load is the most desirable. When the outlet steam temperature becomes excessive, it may cause failures from overheating parts of the superheater.The convective superheater is located in the furnace exit or in the zone where it can receive thermal energy from the high temperature produces of combustion. The convective superheater is frequently screened from the furnace radiation by a bank of water-filled tubes. These tubes, when adequately spaced, can also intercept the slag particle and reduce slagging problems in superheatrs. Convective superheaters in large steam generator systems are frequently split into two parts: the primary superheater and the secondary superheaater. Saturated steam first enters the primary superheater and receives the initial heating. The primary superheater is located in a zone of relatively low gas temperature. After the partial heating steam moves to the secondary superheater and completes its superheaing process. The main reasons for splitting the superheater are to provide space for the steam reheater and to achieve an effective heat transfer from the gases the steam.The radiant superheater is not as commonly used as the convective superheater. When the radiant superheater is needed, it is usually placed on the furnace wall replacing a section of water-filled tubes. Another arrangement is to have the radiant superheater just behind the screen tubes. The radiant superheater is an integral part of the secondary superheater.Central station boilers provide for steam reheating. The reheater is essentially a convective type and usually located in the space between thee primary and secondary superheaters. After steam partially expands in the tubine, it returns to the boiler for reheating. The temperature of steam leaving the reheater is usually equal to the superheated steam temperature. Since the design and operation of reheater are essentially the same as superheaters, the discussion of superheaters will be equally applicable to reheaters.In superheater thermal design, the steam temperature is first determined. This is generally accomplished in the plant system design, balancing the plant initial cost against the lifttime operating cost. In recent years the optimum steam temperature is approximately 538℃ for all large steam generation systems. In the second step, the amount of superheater surface required is approximated.After the amount of superheater surface id determined, the next consideration is to select the tube length, tube diameter, and the number of tubes. Evidently, the selection is an iterative process, generating a trial solution and checking to see whether all constraints are met. From several acceptable solutions, the optimum is found. The optimum superheater should have enough heat transfer surface necessary to give the design steam temperature. The tube parameters(length and diameter) are such that the steam pressure drop and tube metal temperature will not exceed the design values. The tube metal temperature is an important parameter and has a strong influence on the tube material selection. In addition, the optimumsuperheater should have its tubes so spaced that minimum ash and slag deposits will result.Modern superheaters have many tube passes, and the tubes are arranged in-line rather than staggered. The tubes are usually cylindrical and have 5 or 6.3cm outside diameter. There is no extended surface(i.e.fins)attached to the tubes. The material selection depends on the steam temperature and pressure. Carbon steel has an allowable temperature up to 430℃ and is frequently used for loe-temperature superheaters. Chrome-moly, stainless steel, or same similar heat resistant alloy can withstand the temperature up to 650℃. Therefore they are selected for the Superheater in a high-temperature zone.Temperature regulation and control are importation for both superheaters and reheaters. Steam temperature adjustments are frequently made at the time of the commissioning of a boiler. The principal methods are an addition or regulating the hot gas temperature and mass flow rate. These are generally accomplished by changing the excess air or the effectiveness of the evaporation section.During a boiler operation, there are many factors affecting the temperature of steam leaving the superheater and reheater. These include a boiler load, excess air, feedwater temperature, and cleanliness of heating surfaces. Control of steam temperature during operation must be done without changing the arrangement of equipment. The most effective approaches are gas bypass, burner control, attemperation, gas recirculation, excess air, divided furnace.A gas bypass is to control the gas flow rate to superheater. The main disadvantages of this approach are the operating difficulties experienced by the movable dampers located in the high-temperature zone and the slow response to load change.Burner control is used to control the flame location and combustion rate. Tilting burners can direct the flame toward or away from the superheater. These will result in a change of heat absorption in the furnace and change of gas temperature in the superheater. As the boiler load is reduced, burners are removed one by one from service. This will change the combustion rate and, thus, change the gas flow rate to the superheater.Attemperation is one of approaches frequently used. The attemperator is usually located at the point between the primary and secondary superheaters.There are two basic types of attemperator. The first is the tubular type in which some of superheated steam is passed through the tubes of a heat exchanger and has heat transferred to the boiler water(either boiler feedwater or water in the boiler drum).Subsequent to attemperation, the divided streams from the primary superheater will combine and enter the secondary superheater.The second type of attemperator involves a spray of feedwater into the atream ofsuperheated steam. The feedwater evaporates and reduces the steam temperature. Controlling the amount of feedwater will result in control of the ateam temperature. Care must be exercised to ensure that the spray water has sufficient purity. The spray water should mix well with the superheated steam so that there are no water droplets in the inlet of the secondary superjeater.Gas recirculation is used to control the steam temperature by changing the heat absorption rates both in the furnace and in the superheater. When the ateam temperature needs to be raised, some of the furnace. Therefore, the furnace temperature will become lower, resulting in a lower heat absorption in the furnace and thereby a higher flue gas temperature in the furnace exit. This high gas temperature, combined with an increase in the gas floe rate, will increase the heat transfer rate in the superheater and thus increase the steam outlet temperature.Temperature control can be affected bu using different amounts of excess air. the more the excess air, the higher the steam outlet temperature would be. The reasons for this are similar to those for the gas recirculation method. It must be pointed out, however, that too much excess air will result in a reduction of boiler combustion efficiency. A divided-furnace boiler is usually arranged with a generation of saturated steam in one section and a superheating of steam in another section. The temperature of the superheated steam is regulated by controlling the firing rates in the two furnaces. This method is not economical and is seldom applied in a central electric power station.谢谢下载,祝您生活愉快!。