倒车雷达程序电路原理图纸
倒车雷达分析
倒车雷达分析1 倒车雷达的意义和要求随着汽车的迅速增加,停车难已经是不争的事实,狭小的停车场地常常令有车一族无所适从,稍不慎,则闯祸,烦事又烦人。
虽然每辆车都有后视镜,但不可避免的都存在一个后视盲区。
倒车雷达是汽车泊车或者倒车时的安全辅助装置,能以声音或者更为直观的显示告知驾驶员驾驶车辆周围障碍物的情况,解除了驾驶员泊车、倒车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了使用死角和视线模糊的缺陷,提高驾驶的安全性。
倒车雷达的发明是迫在眉睫的,是必不可少的设备。
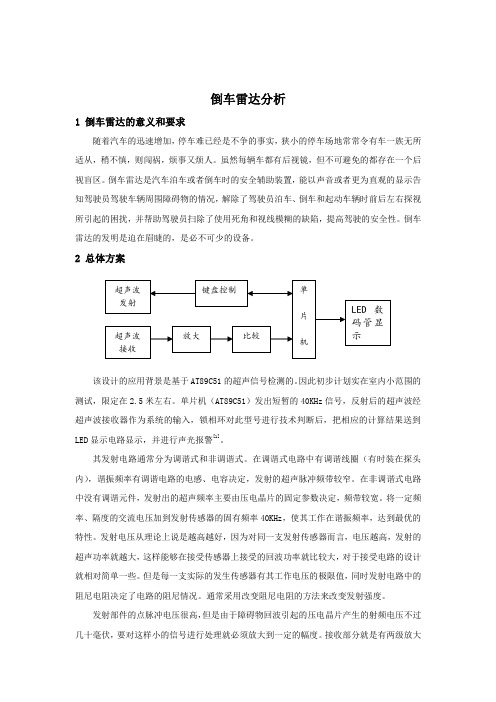
2 总体方案该设计的应用背景是基于AT89C51的超声信号检测的。
因此初步计划实在室内小范围的测试,限定在2.5米左右。
单片机(AT89C51)发出短暂的40KHz信号,反射后的超声波经超声波接收器作为系统的输入,锁相环对此型号进行技术判断后,把相应的计算结果送到LED显示电路显示,并进行声光报警[1]。
其发射电路通常分为调谐式和非调谐式。
在调谐式电路中有调谐线圈(有时装在探头内),谐振频率有调谐电路的电感、电容决定,发射的超声脉冲频带较窄。
在非调谐式电路中没有调谐元件,发射出的超声频率主要由压电晶片的固定参数决定,频带较宽。
将一定频率、隔度的交流电压加到发射传感器的固有频率40KHz,使其工作在谐振频率,达到最优的特性。
发射电压从理论上说是越高越好,因为对同一支发射传感器而言,电压越高,发射的超声功率就越大,这样能够在接受传感器上接受的回波功率就比较大,对于接受电路的设计就相对简单一些。
但是每一支实际的发生传感器有其工作电压的极限值,同时发射电路中的阻尼电阻决定了电路的阻尼情况。
通常采用改变阻尼电阻的方法来改变发射强度。
发射部件的点脉冲电压很高,但是由于障碍物回波引起的压电晶片产生的射频电压不过几十毫伏,要对这样小的信号进行处理就必须放大到一定的幅度。
接收部分就是有两级放大电路,检波电路及锁相环构成,其中包括杂波抑制电路。
最终达到对回波进行放大检测,产生一个单片机(AT89C51)能够识别的中断信号作为回波到达的标志。
超声波检测的倒车雷达讲解
超声波检测的倒车雷达讲解倒车雷达(Car Reversing Aid Systems)的全称是“倒车防撞雷达”,也称“泊车辅助装置”,是汽车泊车安全辅助装置,能以声音或者更为直观的显示告知驾驶员周围障碍物的情况,解除了驾驶员泊车和起动车辆时前后左右探视所引起的困扰,并帮助驾驶员扫除了视野死角和视线模糊的缺陷,提高了安全性。
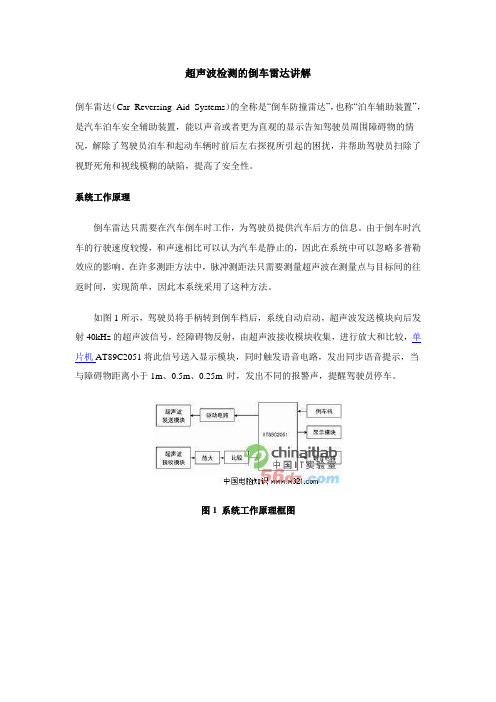
系统工作原理倒车雷达只需要在汽车倒车时工作,为驾驶员提供汽车后方的信息。
由于倒车时汽车的行驶速度较慢,和声速相比可以认为汽车是静止的,因此在系统中可以忽略多普勒效应的影响。
在许多测距方法中,脉冲测距法只需要测量超声波在测量点与目标间的往返时间,实现简单,因此本系统采用了这种方法。
如图1所示,驾驶员将手柄转到倒车档后,系统自动启动,超声波发送模块向后发射40kHz的超声波信号,经障碍物反射,由超声波接收模块收集,进行放大和比较,单片机AT89C2051将此信号送入显示模块,同时触发语音电路,发出同步语音提示,当与障碍物距离小于1m、0.5m、0.25m 时,发出不同的报警声,提醒驾驶员停车。
图1 系统工作原理框图图2 超声波发送模块电路[NextPage]硬件设计1 超声波发送模块设计超声波发送器包括超声波产生电路和超声波发射控制电路两个部分,超声波探头(又称“超声波换能器”)选用CSB40T,可采用软件发生法和硬件发生法产生超声波。
前者利用软件产生40kHz的超声波信号,通过输出引脚输入至驱动器,经驱动器驱动后推动探头产生超声波。
这种方法的特点是充分利用软件,灵活性好,但需要设计一个驱动电流在100mA以上的驱动电路。
第二种方法是利用超声波专用发生电路或通用发生电路产生超声波信号,并直接驱动换能器产生超声波。
这种方法的优点是无须驱动电路,但缺乏灵活性。
本设计采用第一种方法产生超声波,电路设计如图2所示。
40kHz的超声波是利用555时基电路振荡产生的。
其振荡频率计算式为f=1.43/((R 9+2·R 10)·C 5)。
基于单片机的汽车倒车雷达系统设计(含程序)介绍
基于单片机的汽车倒车雷达系统设计摘要随着社会经济的发展交通运输业日益兴旺,汽车的数量在大副攀升。
交通拥挤状况也日趋严重,撞车事件屡屡发生,造成了不可避免的人身伤亡和经济损失,针对这种情况,设计一种响应快,可靠性高且较为经济的汽车倒车防撞预警系统势在必行。
本设计是利用最常见的超声波测距法来设计的一种基于单片机的汽车倒车雷达系统。
本设计的主要是基于STC89C52单片机利用超声波的特点和优势,将超声波测距系统和STC89C52单片机结合于一体,设计出一种基于STC89C52单片机的汽车倒车雷达系统。
该系统采用软、硬件结合的方法,实现了汽车与障碍物之间距离的显示以及危险距离的声光报警等功能。
本设计论文概述了超声波检测的发展及基本原理,阐述了超声波传感器的原理及特性。
在超声波测距系统功能和STC89C52单片运用的基础上,提出了系统的总体构成,对系统各个设计单元的原理进行了介绍,并且对组成各单元硬件电路的主要器件做了详细说明和选择。
本设计论文还介绍了系统的软件结构,并通过编程来实现系统功能和要求。
关键词:汽车倒车雷达、STC89C52、超声波、测量距离、显示距离、声光报警第一章绪论1.1 课题设计的目的和意义随着汽车的普及,越来越多的家庭拥有了汽车。
交通拥挤状况也随之出现,撞车事件也是经常发生,人们在享受汽车带来的乐趣和方便的同时,更加注重的是汽车的安全性,许多“追尾”事故都与车距有着密切的关系。
为了解决这个安全问题,设计一种汽车测距防撞报警系统势在必行。
由于超声波指向性强,能量消耗缓慢,在介质中传播的距离较远,因而超声经常用于距离的测量,如测距仪和物位测量仪等都可以通过超声波来实现。
利用超声波检测往往比较迅速、方便、计算简单。
所以超声波测距法是一种非常简单常见的方法,应用在汽车停车的前后左右防撞的近距离测量,以及在汽车倒车防撞报警系统中,超声波作为一种特殊的声波,具有声波传输的基本物理特性—折射,反射,干涉,衍射,散射。
倒车雷达培训PPT课件

图5:障碍物定义
滚地测试:标准障碍物为直径 30mm、长1m的PVC管,测试用 10cm×10cm的单元格为基本测试 单元。
第18页/共32页4.6ຫໍສະໝຸດ 统探测范围2、水平探测范围
RLM、RRM
探测距离(75mmPVC)
100cm
RL、RR 100cm
FR、FL 60cm
图 5 系统后方探测范围
图 6 系统前方探测范围
第21页/共32页
5.电控模块介绍
倒挡信号-雷达系统上电复位→ 单片机一串40khz矩形脉冲电压 →模拟开关加到超声波发射器与 回波接受电路→驱动放大发出超 声波-单片机计时 1遇障碍反射波-接受传感器-放大 整形→负电压→单片机中断申请 →相应中断停止计时→计算T , S=(C·T)/2 2未遇障碍物-定时中断→选择下 一路(后左路、后左中路、后右 中路、后右路) 最小距离通过LED显示→最小距 离小于设定→蜂鸣器
传感器发出一束短促的超声波脉冲, 当脉冲遇到障碍物时就会 发生反射,传感器将会收到反射回波。超声波在常温下、空气中传播速 度是一定的(约为340m/s),接收器内CPU根据发射与接收波之间的 时间间隔,计算出传感器与障碍物之间的距离。然后经过计算处理,判 断出反射回波是由哪一个传感器接收到的,并根据不同距离,发出缓急 不同的报警声。
第24页/共32页
超声波电信号放大电路采用集成电路CX20106A构成。CX20106A是日本 索尼公司生产的红外遥控信号接收集成电路。通过外部所接电阻,将其内部带 通滤波电路的中心频率f0设置为40 kHz,就可以接收放大超声波电信号,并整 形输出负脉冲电压。
超声波测距应用电路图如图3所示。1脚是超声波电信号输入端,2脚与地之间连接RC串联网络,是
《大众新波罗电路图——原厂2011》倒车雷达a
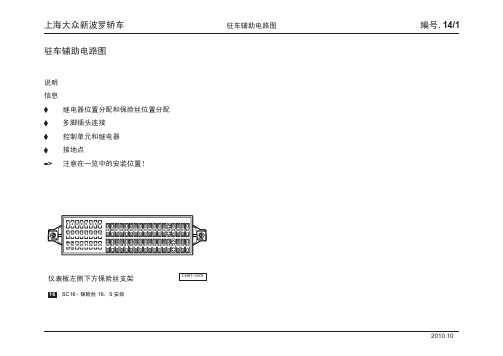
驻车辅助 电路图
说明 信息
继电器位置分配和保险丝位置分配 多脚插头连接 控制单元和继电器 接地点 => 注意在一览中的安装位置!
驻车辅助电路图
1 32 3 4 75 86 7 8 91 10 1141 162 13 14 165 16
25 26 287 28 29 2390 321 32 33 34 35 36 37 38 39 40 41 42
接地连接线 ( 驻车辅助 ),在后保险杠导线束中
2010.10
17 18 189 1280 231 22 223 242 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60
仪表板左侧下方保险丝支架
16 SC16 - 保险丝 16,5 安培
CH97-1575
编号. 14/1
2010.10
上海大众新波罗轿车
驻车辅助电路图
J519
D/15
T6/2
黑 4.0
B273 黑 4.0 9a
KL15
SC16
5A
16b
T73b/12
黑/蓝 0.35
*2
B520
黑/蓝 0.5
T73b/48
黑/蓝 0.5
*
黑/蓝 1.0
*
黑/蓝 1.0
F4 M17
T2co/1 T6by/5
J446
T16L/6
T16L/1 15a
黑/绿 0.5
T3bp/1
T3bp/3
灰/红 0.35
灰/棕 0.35
352 X681516 Nhomakorabea17
18
19
20
四线制倒车雷达探头电气原理图
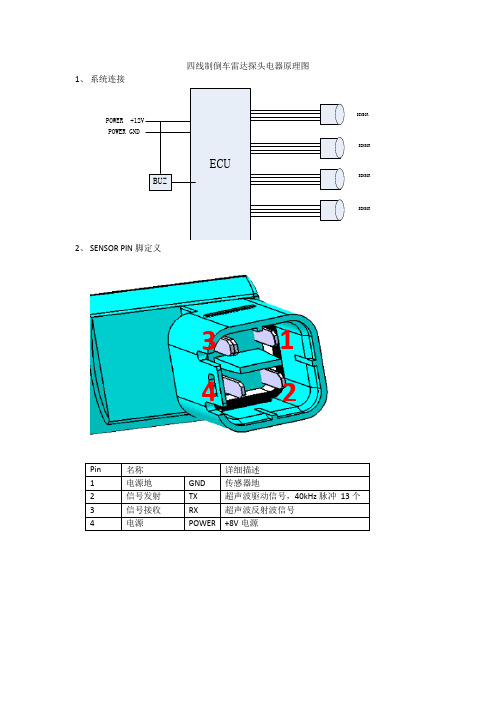
1、系统连接
2、SENSORPIN脚定义
Pin
名称
详细描述
1
电源地
GND
传感器地
2
信号发射
TX
超声波驱动信号,40kHz脉冲13个
3
信号接收
RX
超声波反射波信号
4
电源
POWER
+8V电源3、信号 Nhomakorabea序控制器TX信号脚发射+8v 40kHz的方波脉冲13个用于驱动SENSOR产生超声波。超声波经过障碍物反射后反射波被SENSOR接收。SEMSOR接收反射信号后经过放大滤波及整形变成如上图RX信号的图像。其中余振大约1.2ms,由于障碍物不同和距离的原因是障碍物反射信号强弱不同。反射信号强则反射信号宽度大。最后有控制器(ECU)接收到反射信号,并且计算出障碍物距离。
倒车雷达系统电路图

U4A74ALS04U4B74ALS04U4C74ALS04U4D74ALS04U4E74ALS04LS1TX(F)R81KR91KVCCP10图3-1 超声波发射电路图3-2 集成电路CX20106A内部结构图CX20106A的引脚注释:(1)l 脚:超声波信号输入端,该脚的输入阻抗约为40kΩ。
(2)2脚:该脚与GND之间连接RC串联网络,它们是负反馈串联网络的一个组成部分,改变它们的数值能改变前置放大器的增益和频率特性。
增大电阻R或减小C,将使负反馈量增大,放大倍数下降,反之则放大倍数增大。
但C的改变会影响到频率特性,一般在实际使用中不必改动,推荐选用参数为R=4.7Ω,C=3.3μF。
(3)3脚:该脚与GND之间连接检波电容,电容量大为平均值检波,瞬间相应灵敏度低;若容量小,则为峰值检波,瞬间相应灵敏度高,但检波输出的脉冲宽度变动大,易造成误动作,推荐参数为3.3μF。
(4)4脚:接地端。
(5) 5脚:该脚与电源端VCC 接入一个电阻,用以设置带通滤波器的中心频率f0,阻值越大,中心频率越低。
例如,取R=200k Ω时,fn ≈42kHz ,若取R=220k Ω,则中心频率f0≈38KHz 。
(6) 6脚: 该脚与GND 之间接入一个积分电容,标准值为330pF ,如果该电容取得太大,会使探测距离变短。
(7) 7脚:遥控命令输出端,它是集电极开路的输出方式,因此该引脚必须接上一个上拉电阻到电源端,该电阻推荐阻值为22k Ω,没有接收信号时该端输出为高电平,有信号时则会下降。
(8) 8脚: 电源正极,4.5V ~5V 。
LS34图3-3 超声波检测接收电路图图3-4 AT89C51单片机结构及引脚图图3-6 电源电路。
200601010133图3-7 单片机及显示系统电路图。
倒车雷达电路
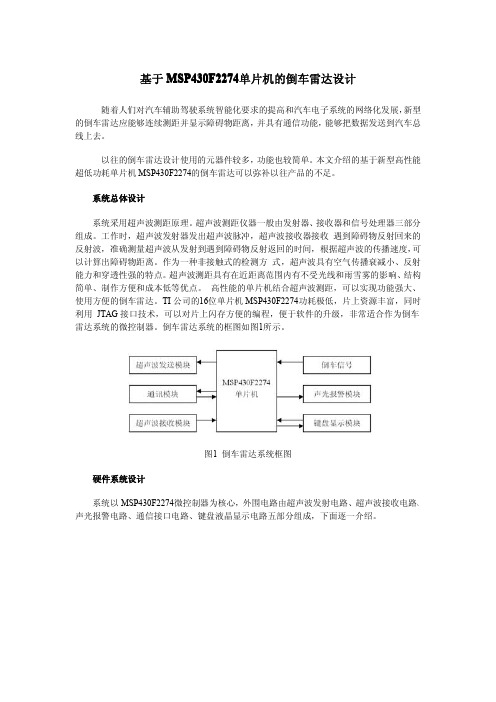
基于MSP430F2274单片机的倒车雷达设计随着人们对汽车辅助驾驶系统智能化要求的提高和汽车电子系统的网络化发展,新型的倒车雷达应能够连续测距并显示障碍物距离,并具有通信功能,能够把数据发送到汽车总线上去。
以往的倒车雷达设计使用的元器件较多,功能也较简单。
本文介绍的基于新型高性能超低功耗单片机MSP430F2274的倒车雷达可以弥补以往产品的不足。
系统总体设计系统采用超声波测距原理。
超声波测距仪器一般由发射器、接收器和信号处理器三部分组成。
工作时,超声波发射器发出超声波脉冲,超声波接收器接收遇到障碍物反射回来的反射波,准确测量超声波从发射到遇到障碍物反射返回的时间,根据超声波的传播速度,可以计算出障碍物距离。
作为一种非接触式的检测方式,超声波具有空气传播衰减小、反射能力和穿透性强的特点。
超声波测距具有在近距离范围内有不受光线和雨雪雾的影响、结构简单、制作方便和成本低等优点。
高性能的单片机结合超声波测距,可以实现功能强大、使用方便的倒车雷达。
TI公司的16位单片机MSP430F2274功耗极低,片上资源丰富,同时利用JTAG接口技术,可以对片上闪存方便的编程,便于软件的升级,非常适合作为倒车雷达系统的微控制器。
倒车雷达系统的框图如图1所示。
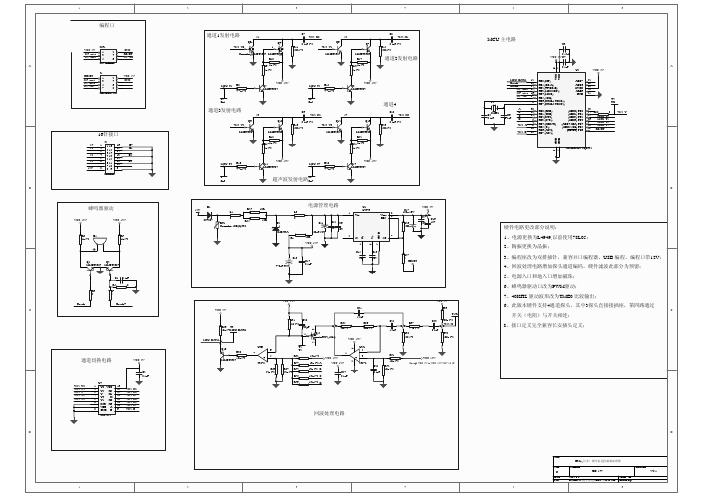
图1倒车雷达系统框图硬件系统设计系统以MSP430F2274微控制器为核心,外围电路由超声波发射电路、超声波接收电路、声光报警电路、通信接口电路、键盘液晶显示电路五部分组成,下面逐一介绍。
图2倒车雷达系统主控电路图系统的主控电路图如图2所示。
本系统中选用的MSP430F2274片内有32Kb闪存和1Kb RAM,因此无须外扩存储器。
外接的32.768kHz晶振作为CPU关闭状态Basic-Timer的时钟源,同时也作为系统的车载时钟使用。
超声波发送模块电路如图3所示,由超声波产生和发射两部分组成。
超声波的产生方法有两种:硬件发生法和软件发生法。
常用的硬件发生法常采用如下方案:超声波由CD4011构成的振荡器振荡产生,经升压变换推动超声波换能器而发射出去,振荡器的起振和停振由单片机来控制。
倒车雷达原理图
通道4
C10 4052_X3 0.1uF 5% R23 22K 5%
Y1 8MHZ C5 0.1uF A B C D 4052_A 4052_B
12 13 14 15 16 17 7 8 30 31 32 1 2 9 10 11
PB0 (ICP) PB1 (OC1A) PB2 (SS/OC1B) PB3 (MOSI/OC2) PB4 (MISO) PB5 (SCK) PB6 (XTAL1/TOSC1) PB7 (XTAL2/TOSC2) PD0 (RXD) PD1 (TXD) PD2(INT0) PD3 (INT1) PD4 (XCK/T0) PD5 (T1) PD6 (AIN0) PD7 (AIN1) GND GND
超声波发射电路T8 Cn4
B
蜂鸣器驱动
VCC_12V VCC_12V
D1 12V IN4007 L1 0
R24
10R
电源管理电路
L3 0 D2 SMBJ33A C11 100uF/50V R1 SI C12 C26 104 103 1 Vin
U1 L4949 Vout RES 8 6
C17 100u/16V R26 10K
C1 R5 R6 0 BuzzerC R7 0
0.1uF 0
VCC_12V Buzzer+ VCC_5V R31 1M 5% C20 3 480pF 1 MCU_DATA Q16 R30 7 10k 5% U3B + 33078 C2 0.1uF U4 4052_Y0 4052_Y2 4052_Y 4052_Y3 4052_Y1 1 2 3 4 5 6 7 8 Y0 VCC Y2 X2 Y X1 Y3 X Y1 X0 INH X3 VEE A GND B 74HC4052 16 15 14 13 12 11 10 9 4052_X2 4052_X1 4052_X 4052_X0 4052_X3 4052_A 4052_B R33 22k 5% 6 5 R32 R47 R34 R44 22k 5% R45 R46 T2 T2 13k 5% 13k 5% A 13k 5% B 13k 5% C 13k 5% D 1 VCC_12V 4 VCC_12V C24 0.1uF C21 1.5nF R35 2k 5% VCC_12V U3A 2 3 33078 C25 0.1uF R41 10k 5% R42 10k 5% VCC_12V 8 R36 68k 5% C22 1.5nF R37 4.7k 5% R38 100 5%
别克GL8维修电路图(11.5.2.2 倒车雷达系统连接器端视)

11.5.2.2 倒车雷达系统连接器端视图左后角部倒车雷达探头左后中间倒车雷达探头接头零件信息 l15324398l3路F MQS 密封(黑色)针 导线颜色 电路编号 功能1 YE (黄色) 2375 左后角部倒车雷达探头信号 2BK (黑色)2379E倒车雷达探头低电平基准接头零件信息 l15324398l3路F MQS 密封(黑色)针 导线颜色 电路编号 功能1 OG (橙色) 2376 左后中间倒车雷达探头信号 2BK (黑色)2379D倒车雷达探头低电平基准右后角部倒车雷达探头右后中间倒车雷达探头接头零件信息 l15324398l3路F MQS 密封(黑色)针 导线颜色 电路编号 功能1 PU (紫色) 2378 右后角部倒车雷达探头信号 2BK (黑色)2379B倒车雷达探头低电平基准接头零件信息 l15324398l3路F MQS 密封(黑色)针 导线颜色 电路编号 功能1 D-GN (深绿色) 2377 右后中间倒车雷达探头信号 2BK (黑色)2379C倒车雷达探头低电平基准倒车雷达探头控制模块接头零件信息l12124957l24路F 安普模块 MODULAR(黑色)针 导线颜色 电路编号 功能1 YE (黄色) 2375 左后角部倒车雷达探头信号2 OG (橙色) 2376 左后中间倒车雷达探头信号3 D-GN (深绿色) 2377 右后中间倒车雷达探头信号4 PU (紫色)2378 右后角部倒车雷达探头信号 5 - - 未用 6-7 - - 未用 8 - - 未用 9-1011 PU (紫色) 739A 点火装置1电压12 GY (灰色) 2616 后置停车辅助系统停用开关 13-14 -- 未用15 BK/WH(黑色/白色) 2379B 倒车雷达探头低电平基准 16 - - 未用 17 1819 L-BU (浅蓝色)2380 后置停车辅助系统信号输出 20 - - 未用 21 - - 未用 22OG (橙色)900灯控制23L-GN(浅绿色)24A 倒车灯供电电压24BK(黑色)350H接地。
新桑塔纳倒车雷达
全新桑塔纳电路图编号 9 / 109.2012驻车距离报警(PDC)自 2012 年 9 月起ws =白色sw =黑色ro =红色rt =红色br =褐色gn =绿色bl =蓝色gr =灰色li =淡紫色vi =淡紫色ge =黄色or =橘黄色rs=粉红色倒车灯开关, 驻车辅助控制单元D - 点火起动开关F4-倒车灯开关J446-驻车辅助控制单元J519- 车载电网控制单元SC6-保险丝架 C 上的保险丝 6SC13-保险丝架 C 上的保险丝 13T2f - 2 芯插头连接T7a - 7 芯插头连接T16e - 16 芯插头连接T73b - 73 芯插头连接T73c- 73 芯插头连接50 - 行李箱左侧接地点 368 - 接地连接 3,在主导线束中 B273 - 正极连接(15),在主导线束中 B281 - 正极连接 5(15a ),在主导线束中 B520- 连接(RF ),在主导线束中*- 仅适用于带手动变速箱的车辆*2- 仅适用于带车载电网控制单元 BCM 的车辆*3- 仅适用于带自动变速箱的车辆*4- 仅适用于带车载电网控制单元 BFM 的车辆ws =白色sw =黑色ro =红色rt =红色br =褐色gn =绿色bl =蓝色gr =灰色li =淡紫色vi =淡紫色ge =黄色or =橘黄色rs =粉红色G203- 左后驻车辅助传感器G796-中部后侧驻车辅助传感器J446- 驻车辅助控制单元T3L - 3 芯插头连接T3m - 3 芯插头连接T12p- 12 芯插头连接352 - 接地连接(驻车辅助),在后保险杠导线束里 X68- 连接(驻车辅助),在后保险杠导线束中ws =白色sw =黑色ro =红色rt =红色br =褐色gn =绿色bl =蓝色gr =灰色li =淡紫色vi =淡紫色ge =黄色or =橘黄色rs =粉红色G206- 右后驻车辅助传感器H15- 后部驻车辅助报警蜂鸣器J446- 驻车辅助控制单元T2ap - 2 芯插头连接T3n - 3 芯插头连接T12p - 12 芯插头连接T16e- 16 芯插头连接352 - 接地连接(驻车辅助),在后保险杠导线束里 X68- 连接(驻车辅助),在后保险杠导线束中。
汽车倒车
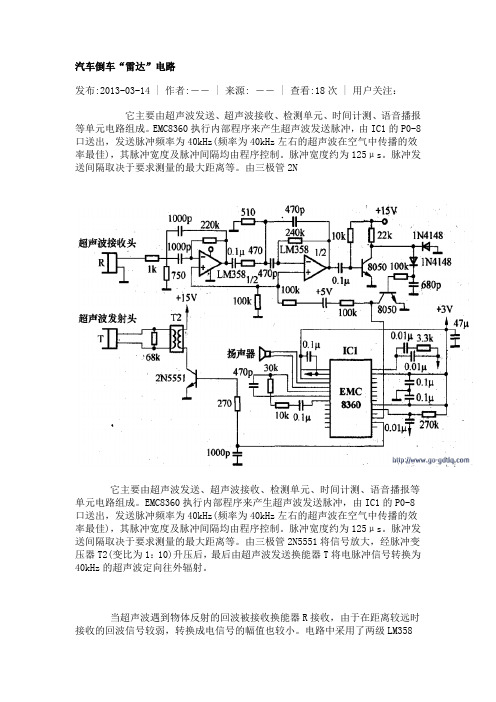
汽车倒车“雷达”电路发布:2013-03-14 | 作者:-- | 来源: -- | 查看:18次 | 用户关注:它主要由超声波发送、超声波接收、检测单元、时间计测、语音播报等单元电路组成。
EMC8360执行内部程序来产生超声波发送脉冲,由IC1的P0-8口送出,发送脉冲频率为40kHz(频率为40kHz左右的超声波在空气中传播的效率最佳),其脉冲宽度及脉冲间隔均由程序控制。
脉冲宽度约为125μs。
脉冲发送间隔取决于要求测量的最大距离等。
由三极管2N它主要由超声波发送、超声波接收、检测单元、时间计测、语音播报等单元电路组成。
EMC8360执行内部程序来产生超声波发送脉冲,由IC1的P0-8口送出,发送脉冲频率为40kHz(频率为40kHz左右的超声波在空气中传播的效率最佳),其脉冲宽度及脉冲间隔均由程序控制。
脉冲宽度约为125μs。
脉冲发送间隔取决于要求测量的最大距离等。
由三极管2N5551将信号放大,经脉冲变压器T2(变比为1:10)升压后,最后由超声波发送换能器T将电脉冲信号转换为40kHz 的超声波定向往外辐射。
当超声波遇到物体反射的回波被接收换能器R接收,由于在距离较远时接收的回波信号较弱,转换成电信号的幅值也较小。
电路中采用了两级LM358运算放大器对微弱电信号进行充分放大。
放大后的交流电信号送入8050三极管比较器将信号整形为方波信号输出,然后再.由下一级三极管8050放大后,直接输入到IC1的P0-7口。
EMC8360片内的微处理器立即响应,产生播报语音输出。
本装置中的超声波发射器和接收器均采用UCM40。
型压电陶瓷发生器(或称传感器),它们都是利用压电晶体的谐振来进行工作的。
压电式超声波发生器内部有两个压电晶片和一个共振板。
当在它的两极片之间施加频率等于压电晶片的固有振荡频率的脉冲信号时,压电晶片将产生共振,并带动共振板振动而产生超声波,由电信号转换成为机械能,这便是超声波发射器。