超经典CANoe-工程案例
canoe循环语句

canoe循环语句Canoe是一种循环语句,用于在编程中重复执行特定的任务。
它可以帮助程序员简化代码,提高代码的可读性和可维护性。
在本文中,我们将探讨Canoe循环语句的各种用法和示例。
我们将从基本的循环开始,然后介绍一些高级的用法和技巧。
1. 基本的Canoe循环Canoe循环最基本的用法是重复执行一段代码,直到满足指定的条件。
下面是一个简单的示例,演示了如何使用Canoe循环来计算1到10的和。
```canoevar sum = 0;var i = 1;while (i <= 10) {sum += i;i++;}console.log("1到10的和为:" + sum);```在上面的代码中,我们使用了一个变量`sum`来保存和的值,一个变量`i`来追踪循环的次数。
循环的条件是`i <= 10`,即`i`小于等于10时继续执行循环体内的代码。
每次循环,我们将`i`的值加到`sum`上,并将`i`的值递增1。
最后,我们打印出计算得到的和。
2. Canoe循环的嵌套Canoe循环可以嵌套在其他循环内部,以实现更复杂的逻辑。
下面是一个示例,演示了如何使用两个Canoe循环来打印出一个九九乘法表。
```canoefor (var i = 1; i <= 9; i++) {for (var j = 1; j <= i; j++) {console.log(j + "x" + i + "=" + (i * j) + " ");}console.log("\n");}```在上面的代码中,我们使用了两个嵌套的Canoe循环。
外部循环控制行数,内部循环控制列数。
内部循环中的`j`从1开始递增,直到`j`等于`i`为止。
每次循环,我们打印出乘积的表达式。
最后,我们在每行的末尾打印一个换行符,以确保每行的乘法表格都在单独的一行上。
CANOE教程(2024)

关闭所有正在运行的程序, 重新启动计算机后尝试重新
安装。
10
常见问题解决方案
2024/1/30
01
检查安装包是否完整,如果安装包损坏,请重新下 载。
02
2. 无法激活软件
03
确保输入的许可证密钥或激活码正确无误。
11
常见问题解决方案
2024/1/30
01 检查网络连接是否正常,尝试重新启动计算机后 再次激活。
02 如果问题仍然存在,请联系软件供应商获取帮助 。
03
3. 软件运行缓慢或崩溃
12
常见问题解决方案
检查计算机性能是否满足系统要求。 更新显卡驱动和操作系统至最新版本。
2024/1/30
关闭其他正在运行的程序,释放系统资 源。 如果问题仍然存在,请尝试重新安装软 件或联系技术支持获取帮助。
13
03
控制系统功能验证
阐述如何利用CANOE对工业自动化控制系统的 功能进行验证,包括逻辑控制、数据处理等方面 。
故障诊断与远程维护
3
分享在工业自动化领域应用CANOE进行故障诊 断与远程维护的实战经验,提高生产效率和设备 利用率。
2024/1/30
29
THANKS
2024/1/30
30
示波器
用于检测CAN信号波形, 帮助定位物理层问题。
万用表
用于测量电压、电阻等参 数,辅助诊断硬件故障。
24
远程协助服务流程
问题描述与确认
用户详细描述故障现象,工程 师根据描述初步判断故障类型 。
故障定位与解决
根据分析结果,工程师给出故 障定位及解决方案建议,用户 根据建议进行操作。
建立远程连接
通过远程桌面软件或VPN等方 式建立远程连接,确保双方可 以实时沟通。
CANoe功能介绍及应用案例.ppt

查表函数
Index()
END
Table_3D ()
ISG_HCU_state_Cal ()
OutTorq_Cal ()
编写Panel界面
关联按钮
...
Thanks
19
东风汽车公司技术中心
DONGFENG MOTOR CORP. R&D CENTER
CANoe功能介绍及应用案例
动力总成部 7月20日
1
Dong Feng Motor Corporation Technical Center◎2012 All rights reserved.
目录
一、CANoe的功能介绍 二、CANoe试验设计 三、CANoe应用案例解析
HCU_state=0 outTorq=0
Iபைடு நூலகம்le
HCU_state=2 outTorq=
T-Fric+PID
Recycle
HCU_state=3 outTorq=-f(vs,n)
Acc
HCU_state=4 Torq=
T-Fric+T_dri
Assist
HCU_state=6 outTorq= T-demand-T_max
ECU
CANoe
报文
(EMS1~EMS8)
设置EMS1报文触发, 定义HCU2报文中的 HCU_EngSpdCmd和
HCU_EngControlMod e,其通过Panel赋值
调速模式
三、应用案例解析
2、建立网关—解决自动挡刹车前窜故障
实验目的
S30/H30自动挡车型“刹车前窜”的主要原因是在 刹车过程中,出现了扭矩干涉,使PID的调节失效。 具体原因如下:
2024版canoe使用教程[1]
![2024版canoe使用教程[1]](https://img.taocdn.com/s3/m/5492c88d5ebfc77da26925c52cc58bd631869397.png)
canoe使用教程目录•引言•CANoe软件概述•CAN网络基础知识•使用CANoe进行CAN网络仿真•使用CANoe进行CAN网络监控与分析•使用CANoe进行CAN网络测试与验证•总结与展望01引言目的和背景01介绍canoe软件的基本功能和特点,帮助用户更好地了解和使用该软件。
02提供详细的canoe软件使用教程,指导用户完成各种操作和任务。
03分享canoe软件的使用经验和技巧,提高用户的工作效率和准确性。
0102030405canoe 软件的基本概念和术语解释。
canoe 软件的安装和配置方法。
canoe 软件的高级功能和使用技巧。
canoe 软件的基本操作和功能介绍。
canoe 软件在实际应用中的案例分析和解决方案。
教程范围02CANoe软件概述1234强大的CAN 网络仿真功能实时数据分析与监控灵活的报文编辑与发送丰富的诊断与测试功能软件功能和特点支持多通道CAN 网络仿真,可模拟复杂的CAN 通信场景。
提供直观的报文编辑界面,支持多种CAN 报文格式,并可定时或触发发送。
可对CAN 网络数据进行实时采集、解析和显示,支持多种数据格式和图表展示。
集成多种CAN 诊断协议,支持ECU 诊断、故障注入等测试功能。
01020304主界面报文编辑窗口图形化显示窗口诊断与测试窗口软件界面介绍包括菜单栏、工具栏、项目浏览器、报文显示窗口等部分,提供全面的软件操作和信息展示功能。
用于创建和编辑CAN 报文,支持多种报文格式和属性设置。
提供诊断协议配置、故障注入等测试功能操作界面。
以图形化方式展示CAN 网络数据,包括报文时序图、状态机等。
安装步骤配置要求驱动程序安装软件设置软件安装与配置确保计算机满足最低系统要求,如操作系统版本、处理器、内存等。
下载软件安装包,解压后运行安装程序,按照提示完成安装过程。
启动软件后,进行必要的设置,如选择语言、配置CAN 通道参数等。
根据硬件接口类型和操作系统要求,安装相应的CAN 接口驱动程序。
05_CANoe仿真流程实例

05_CANoe仿真流程实例目录一、前言 (2)二、创建数据库 (3)2.1新建数据库 (3)2.2创建信号 (4)2.3创建消息 (5)2.4创建网络节点 (6)2.5创建环境变量 (6)2.6创建ECU (7)三、总线仿真 (8)四、编写CAPL程序 (10)4.1编程界面 (10)4.2编程思路 (11)4.3流程图 (12)4.4节点switch程序 (13)4.5节点light程序 (18)五、编辑面板 (19)六、运行 (23)一、前言CANoe是德国Vector公司开发的一套通用的CAN总线系统开发、测试和分析工具。
这个文档的目的是通过一个交通灯的例子帮助大家熟悉CANoe的使用流程。
首先简要介绍下例子的内容:这个例子仿真的是十字路口的交通灯。
我们要做到打开交通灯的开关后,红灯亮3秒钟后熄灭,接着绿灯亮3秒钟后熄灭,然后黄灯亮1秒钟后熄灭,接入下一个循环红灯亮。
当交通灯的开关关闭的时候,3s 3s 1s3个灯都熄灭,也可以通过输入“a”来停止交通灯的工作,相当于遥控开关。
说明:实际的交通灯工作时间远大于3秒钟(1秒钟),而在例子中我并没有按照实际的交通灯工作时间来设计的,把循环时间减少为的是方便大家观察3个灯的交替工作。
二、创建数据库对系统的仿真首先要建立系统的数据库,包括在总线上通讯的节点,及节点发送和接受的消息,消息里的信号和模拟真实环境的环境变量。
通过以下步骤创建数据库:2.1 新建数据库打开File→Open Candb Editor或者直接在工具栏里单击按钮就可以进入数据库编辑器。
打开File→Create Database选择CANoe Template.dbc,选择保存路径(我的保存路径是E:\vector\test5 \test5.dbc)2.2 创建信号在这个例子中,总线上并没有灯的反馈信息,只有一个总的开关信号和3个灯控制信号。
右键单击Signal→New... →Definition注:未定义的采用默认值(下同)。
CANoe简易教程1

CANoe简易教程1转载自 /posts/canoe-tutoiral-part-1.html简介CANoe是什么如果你和我一样接触了点车辆电子开发的话,你可能会听说过CANoe。
CANoe是德国Vector Informatik出品的开发软件,主要用于主机厂(OEMs),或者ECU供应商进行CAN网络,或者CAN相关ECU的开发、分析、仿真、测试和诊断。
当然,CAN 总线主要应用与汽车。
所以Vector Informatik(简称Vector )可以算是一家车辆电子技术公司。
和 Vector 做类似事情的公司还有 Phoenix Contack、Robert Bosch、Siemens、Magix 等等。
我目前所在的单位选择Vector 的 CANoe 是有理由的,尽管我不知道(汗CANoe能做什么庞大的机器中,很有可能含有许多电子控制器(称为ECU,Electronic Control Unit)。
如果是汽车,他们很有可能使用CAN总线进行通讯。
比如发动机控制器、车身控制器、仪表盘。
CANoe有两个主要功能,1.CANoe提供了一个由计算机控制的仿真CAN网络,以及仿真网络上的仿真CAN总线设备。
并且配合外设CAN收发器,CANoe还能够将这段虚拟网络与真实网络连接起来。
2.CANoe能够分析、记录网络上的消息。
这样就能知道任何设备向任何设备发送的信息。
给出各种图表和报告,例如总线占用率、某个信号值随时间的变化等等。
将这些信息展示给用户,用于对器件或者网络的诊断。
简单来说,仿真和分析。
比如,我们现在要设计一个CAN网络,包含若干ECU。
那么在我们的一份设计书中,就会列出,各个ECU向外发送哪些消息、分别使用什么ID、值代表什么意思、哪些ECU会接收哪条消息,以及这些消息是否是周期信号,等等。
在开发的初期,我们可能没有任何ECU。
那么使用CANoe仿真整个网络(所有设备),这样就能了解你设计的网络会不会有什么问题。
CANoe入门Stepbystep系列(1、2、3)

CANoe是Vector公司的针对汽车电子行业的总线分析工具,现在我用CANoe7.6版本进行介绍,其他版本功能基本差不多。
硬件我使用的是CAN case XL.1,CANoe软件的安装很简单,先装驱动,再装软件。
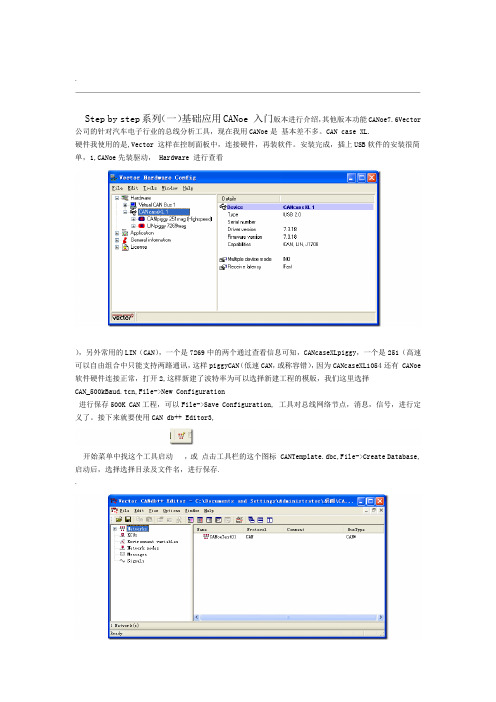
安装完成,插上USB,连接硬件,这样在控制面板中,Vector Hardware 进行查看通过查看信息可知,CANcaseXL中的两个piggy,一个是251(高速CAN),一个是7269(LIN),另外常用的还有1054(低速CAN,或称容错CAN),因为CANcaseXL中只能支持两路通讯,这样piggy可以自由组合2,硬件连接正常,打开CANoe软件文案大全File->New Configuration 可以选择新建工程的模版,我们这里选择CAN_500kBaud.tcn,这样新建了波特率为500K CAN工程,可以File->Save Configuration,进行保存3,接下来就要使用CAN db++ Editor工具对总线网络节点,消息,信号,进行定义了。
点击工具栏的这个图标,或开始菜单中找这个工具启动启动后,File->Create Database,选择CANTemplate.dbc,选择目录及文件名,进行保存右键 Network nodes->New ,进行网络节点的定义,这里只需要填写Name即可,例如:Node_A文案大全然后添加Node_B,完成后如下图,这样在Network nodes目录下面添加出来两个节点节点添加完成后,下一步添加CAN消息,右键Messages->New,这是需要定义名称,ID,DLC等信息,如下:文案大全然后在Transmitters页面,点击Add按钮,添加Node_A为发送节点,意思就是说,此消息是从Node_A节点发送出来的文案大全其实还有一种方法就是,此时暂时不定义发送节点,然后直接以拖曳的方式拖曳到发送节点上,功能上是一样的有了消息,消息里携带的东西自然是信号咯,那么我们开始创建一个信号右键Signals->New,填写如下信息文案大全信号当然要放到消息中咯,切换到Messages页面,Add 我们刚刚建立的Message_A,当然和上面一样,采用拖曳的方式从Signal到Message中建立关联也是可以的。
canoe eth案例

canoe eth案例Canoe是一个基于以太坊的去中心化应用平台,它提供了一个安全、高效和可扩展的平台,供开发者构建和运行去中心化应用程序。
以下是Canoe ETH案例的一些具体内容:1. 区块链技术的应用:Canoe ETH利用以太坊区块链技术,实现了一个分布式的账本系统,使得交易记录和智能合约的执行结果被公开透明地记录在区块链上,确保了数据的不可篡改性和安全性。
2. 去中心化应用开发:Canoe ETH提供了一套丰富的工具和API,使得开发者可以轻松构建去中心化应用程序。
开发者可以使用Solidity编程语言编写智能合约,并通过Canoe ETH的开发工具包进行部署和测试。
3. 智能合约的应用场景:Canoe ETH的智能合约可以应用于各个领域,例如供应链管理、金融服务、电子商务等。
智能合约可以自动执行合约规定的条件和操作,提高交易的效率和可靠性。
4. 去中心化身份验证系统:Canoe ETH可以用于构建去中心化的身份验证系统,通过使用以太坊的加密技术,用户可以获得一个唯一的身份标识,并使用该标识进行身份验证和授权。
5. 去中心化投票系统:利用Canoe ETH的智能合约功能,可以构建一个去中心化的投票系统,实现透明、公正和安全的选举过程,避免了传统选举过程中的作弊和舞弊问题。
6. 去中心化存储系统:Canoe ETH可以用于构建去中心化的存储系统,将数据分散存储在区块链网络的各个节点上,提高了数据的可靠性和安全性,避免了数据被篡改或丢失的风险。
7. 去中心化金融服务:Canoe ETH可以用于构建去中心化的金融服务平台,例如去中心化交易所、去中心化借贷平台等。
用户可以通过智能合约进行资产交易和借贷,去除了传统金融服务中的中间环节,降低了交易成本和风险。
8. 区块链游戏开发:Canoe ETH可以用于构建基于区块链的游戏,利用智能合约实现游戏规则的自动执行和奖励的分配,增加了游戏的公平性和可玩性。
【案例分享】基于CANoe的诊断Coding及Flash实现
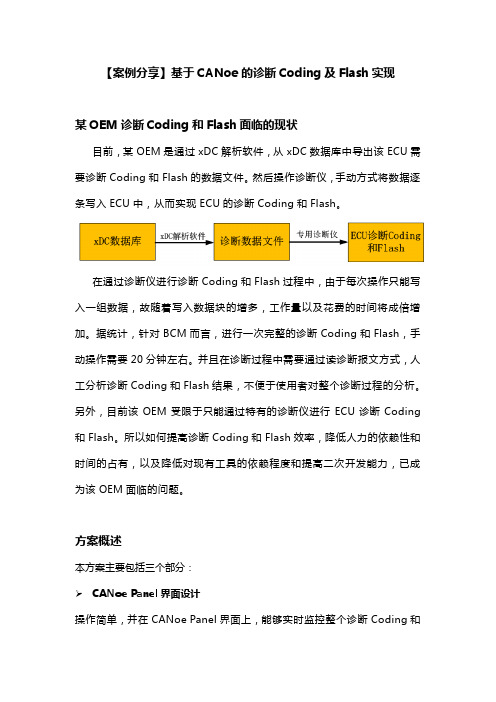
【案例分享】基于CANoe的诊断Coding及Flash实现某OEM诊断Coding和Flash面临的现状目前,某OEM是通过xDC解析软件,从xDC数据库中导出该ECU需要诊断Coding和Flash的数据文件。
然后操作诊断仪,手动方式将数据逐条写入ECU中,从而实现ECU的诊断Coding和Flash。
在通过诊断仪进行诊断Coding和Flash过程中,由于每次操作只能写入一组数据,故随着写入数据块的增多,工作量以及花费的时间将成倍增加。
据统计,针对BCM而言,进行一次完整的诊断Coding和Flash,手动操作需要20分钟左右。
并且在诊断过程中需要通过读诊断报文方式,人工分析诊断Coding和Flash结果,不便于使用者对整个诊断过程的分析。
另外,目前该OEM受限于只能通过特有的诊断仪进行ECU诊断Coding 和Flash。
所以如何提高诊断Coding和Flash效率,降低人力的依赖性和时间的占有,以及降低对现有工具的依赖程度和提高二次开发能力,已成为该OEM面临的问题。
方案概述本方案主要包括三个部分:➢CANoe Panel界面设计操作简单,并在CANoe Panel界面上,能够实时监控整个诊断Coding和Flash流程,并自动解析成易懂的语言。
➢CANoe CAPL脚本编程包括基于ISO14229的诊断服务函数库和基于ISO15765的传输协议函数库。
根据用户提供的诊断Coding和Flash流程,结合北汇信息提供的API的函数,即可实现ECU诊断Coding和Flash。
由于该方案采用的是CANoe CAPL编程,所以方便用户进行二次开发。
➢自动生成脚本工具操作简单,只需导入诊断数据文件,即可自动生成脚本。
实施流程本方案工作流程见下图所示:应用效果下图为对BCM进行诊断Coding和Flash的实测效果图。
采用该方案达到的效果➢节省人力成本根据实测统计,针对BCM而言,通过软件自动实现诊断Coding和Flash,5分钟左右可完成,并且在过程中基本不需要人力参与。
超经典CANoe工程案例word精品
.Step by step系列(一)基础应用CANoe 入门版本进行介绍,其他版本功能CANoe7.6Vector 公司的针对汽车电子行业的总线分析工具,现在我用CANoe是基本差不多。
CAN case XL.硬件我使用的是,Vector 这样在控制面板中,连接硬件,再装软件。
安装完成,插上USB软件的安装很简单,1,CANoe先装驱动, Hardware 进行查看),另外常用的LIN(CAN),一个是7269中的两个通过查看信息可知,CANcaseXLpiggy,一个是251(高速可以自由组合中只能支持两路通讯,这样piggyCAN(低速CAN,或称容错),因为CANcaseXL1054还有 CANoe 软件硬件连接正常,打开2,这样新建了波特率为可以选择新建工程的模版,我们这里选择CAN_500kBaud.tcn,File->New Configuration进行保存500K CAN工程,可以File->Save Configuration, 工具对总线网络节点,消息,信号,进行定义了。
接下来就要使用CAN db++ Editor3,开始菜单中找这个工具启动,或点击工具栏的这个图标 CANTemplate.dbc,File->Create Database,启动后,选择选择目录及文件名,进行保存..右键 Network nodes->New ,进行网络节点的定义,这里只需要填写Name即可,例如:Node_A然后添加Node_B,完成后如下图,这样在Network nodes目录下面添加出来两个节点DLCIDMessages->New,CAN节点添加完成后,下一步添加消息,右键这是需要定义名称,,等信息,如下:. .然后在Transmitters页面,点击Add按钮,添加Node_A为发送节点,意思就是说,此消息是从Node_A节点发送出来的其实还有一种方法就是,此时暂时不定义发送节点,然后直接以拖曳的方式拖曳到发送节点上,功能上是一样的有了消息,消息里携带的东西自然是信号咯,那么我们开始创建一个信号 Signals->New,右键填写如下信息..用0和1来表示开关信号状态似乎还不是很直观,我们可以使用on和off来表示就好了,于是View->Value Tables,右键空白处->New,键入如下信息:..定义好了之后,还需要跟信号进行关联。
CANoe仿真工程

CANoe仿真工程操作面板是长这样的,总线上挂了两个模块,一个是开关,一个是指示灯。
这里不去考虑鼠标点击开关的时候操作系统做的哪些乱七八糟的事情,虽然我们看见的按钮开与闭显示在屏幕上,操作系统也默默做了很多很多细枝末节的进程调度。
逻辑上,我们只认为是开关打开和关闭是一个只有两个状态的变量,这里把变量定义为系统变量,这样读起来写起来会方便一些。
现在仿真工程要做的就是将两个模块挂到总线上,响应两个事件,一个是系统变量svSwitch的改变,一个是收到报文。
开关变量改变后,事件函数将系统变量svSwitch的当前值读出来,复制给报文的信号bsSwitch,然后再将报文输出到总线上。
收到报文后,相关的事件函数负责将报文的信号读出来,赋值给系统变量svLight,这个时候我们就可以看见灯泡的颜色改变,表示被打开或者被关闭。
在干完教程所说的一切之后我非常荣幸遇到了应答码错误,问题产生的原因是发送节点在发送完15位CRC校验码和CRC分隔符之后,在ACK SLot上发送一位隐形电平,接收节点此时在 ACK SLot上发送一位显性电平作为ACK响应,之后发送节点发送ACK分隔符以及EOF,没有收到ACK响应的即not ACK。
解决办法,有两个,感谢同事的帮忙。
先说可靠的,勾选TX Self-ACK。
(只管发报文就好了)再说不可靠的,我按照同事的提醒,连上了EPS作为真实节点,当然这里还需要修改通道,需要把canape,ees以及canoe都挂到新的端口下面,默认这个时候EPS是被唤醒了的。
这个时候运行我自己的仿真工程,就会检测到很多莫名其妙的报文,看解析出来的ID就会发现和原本定义的差别很大。
但是这个不重要,重要的是,这个时候不再报ACK应答错误了,真实节点应答了,但是真实节点并不需要开关节点发出的报文。
但是不管怎样,报文是发出去了,发出去了之后,灯泡节点自然而然就响应了。
这个时候,我就想关掉EPS试试看,然后就非常荣幸遇到了第二个错误Stuff Error,填充错误,节点在检测对象的时候违反填充规则,出现连续6位或者连续6位以上相同电平,判定为填充错误。
CANoe管用实践实例
CANoe简单入门实例利用一个简单的例子,叙述CANoe的基本使用方法。
1、新建一个工程|||打开CANoe-File-new configuration-选择CAN_500kBuadTemplate.tcn。
保存的时候新建一个文件夹canno_self_demo,在其中新建一个demo_from_world。
取名main,保存。
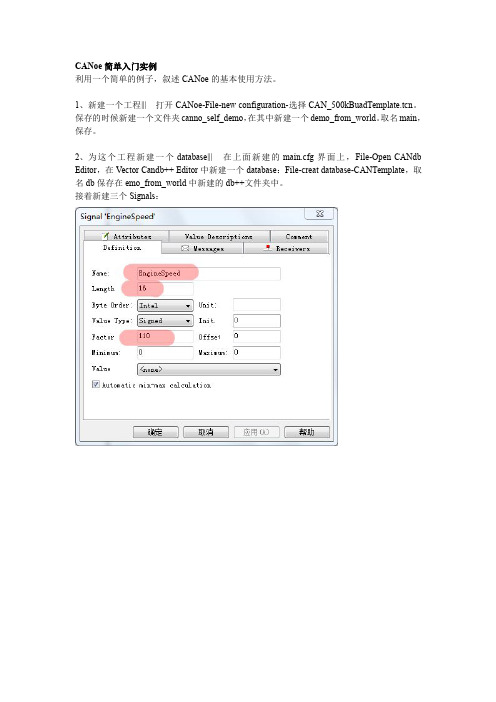
2、为这个工程新建一个database|||在上面新建的main.cfg界面上,File-Open CANdb Editor,在Vector Candb++Editor中新建一个database:File-creat database-CANTemplate,取名db保存在emo_from_world中新建的db++文件夹中。
接着新建三个Signals:NEW两个Messages:由于Signals需要放到Messages中才能够传输,所以:而,Singles在Message中需要有很多位置可以负载,我们需要确定一下位置,我们可以在Message中设置Signals的位置(可以拖动)如下:Message从哪里发出来?所以需要在Network nodes中来new两个ECU,如下:并且,把这个ECU操作的Messages带进来:ECU2同样的操作:Ok,db大部分的工作做完了。
解释一下:Signals中间有三个信号,分别是引擎的速度,引擎的温度,以及齿轮值。
Messages中两个消息,一个负载这引擎的信号,一个负载齿轮的信号。
这两个分别由两个ECU来发出,ECU1、ECU2。
那么,这里能够显著变化的就是速度温度齿轮值的变化,所以我们新建一个控制面板来对着三个信号进行控制,那么,我们就需要新建三个环境变量来与之对应。
????怎么解释:::::疑惑1。
在Environment variables right click-new:三个变量都一样。
此时,database我们操作完成。
CANoe从入门到精通保姆级教程(二)

CANoe软件概述
CANoe是一款由Vector公司开发的CAN网络开发和测试工具,支持CAN 、LIN、FlexRay等多种汽车通信网络。
它提供了强大的仿真、测试、分析和诊断功能,适用于汽车电子领域的开 发、测试和验证。
CANoe具有直观易用的图形界面和丰富的功能模块,方便用户快速上手 和高效工作。
CANoe在汽车电子领域应用
车载网络开发与测试
CANoe可用于开发和测试车载 CAN网络,包括节点仿真、消 息发送与接收、错误注入等。
ECU开发与测试
在ECU开发过程中,CANoe可 用于实现ECU的仿真、测试和 验证,支持多种ECU接口和通 信协议。
故障诊断与排除
CANoe提供了强大的故障诊断 和排除功能,可帮助工程师快 速定位和解决问题。
案例背景介绍
介绍某车型UDS诊断服务开发的背景和 需求。
遇到的问题及解决方案
列举在开发过程中遇到的问题以及采 取的解决方案。
诊断服务开发过程
详细描述该车型UDS诊断服务的开发 过程,包括协议设计、服务开发、测 试和验证等步骤。
经验教训总结
总结在该车型UDS诊断服务开发过程 中的经验教训,为类似项目的开发提 供参考。
解决方案
针对该故障节点进行排查和修复,重新配置节点参数和通信协议,确保消息发送和接收正 常。经过修复后,车辆恢复正常启动,仪表盘指示灯也恢复正常。
PART 03
诊断服务开发与调试技巧
REPORTING
UDS诊断服务概述及开发流程
UDS诊断服务概述
确定诊断需求
设计诊断协议
开发诊断服务
测试与验证
UDS(Unified Diagnostic Services) 是一种标准化的汽车诊 断通信协议,用于实现 ECU(电子控制单元) 之间或外部测试设备与 ECU之间的诊断通信。
超经典CANoe工程案例

超经典CANoe工程案例CANoe入门Stepbytep系列(一)基础应用CANoe是Vector公司的针对汽车电子行业的总线分析工具,现在我用CANoe7.6版本进行介绍,其他版本功能基本差不多。
硬件我使用的是CANcae某L.1,CANoe软件的安装很简单,先装驱动,再装软件。
安装完成,插上USB,连接硬件,这样在控制面板中,VectorHardware进行查看通过查看信息可知,CANcae某L中的两个piggy,一个是251(高速CAN),一个是7269(LIN),另外常用的还有1054(低速CAN,或称容错CAN),因为CANcae某L中只能支持两路通讯,这样piggy可以自由组合2,硬件连接正常,打开CANoe软件File->NewConfiguration可以选择新建工程的模版,我们这里选择CAN_500kBaud.tcn,这样新建了波特率为500KCAN工程,可以File->SaveConfiguration,进行保存3,接下来就要使用CANdb++Editor工具对总线网络节点,消息,信号,进行定义了。
点击工具栏的这个图标,或开始菜单中找这个工具启动启动后,File->CreateDatabae,选择CANTemplate.dbc,选择目录及文件名,进行保存右键Networknode->New,进行网络节点的定义,这里只需要填写Name 即可,例如:Node_A然后添加Node_B,完成后如下图,这样在Networknode目录下面添加出来两个节点节点添加完成后,下一步添加CAN消息,右键Meage->New,这是需要定义名称,ID,DLC等信息,如下:然后在Tranmitter页面,点击Add按钮,添加Node_A为发送节点,意思就是说,此消息是从Node_A节点发送出来的其实还有一种方法就是,此时暂时不定义发送节点,然后直接以拖曳的方式拖曳到发送节点上,功能上是一样的有了消息,消息里携带的东西自然是信号咯,那么我们开始创建一个信号右键Signal->New,填写如下信息信号当然要放到消息中咯,切换到Meage页面,Add我们刚刚建立的Meage_A,当然和上面一样,采用拖曳的方式从Signal到Meage中建立关联也是可以的。
CANoe在整车系统开发测试中的应用
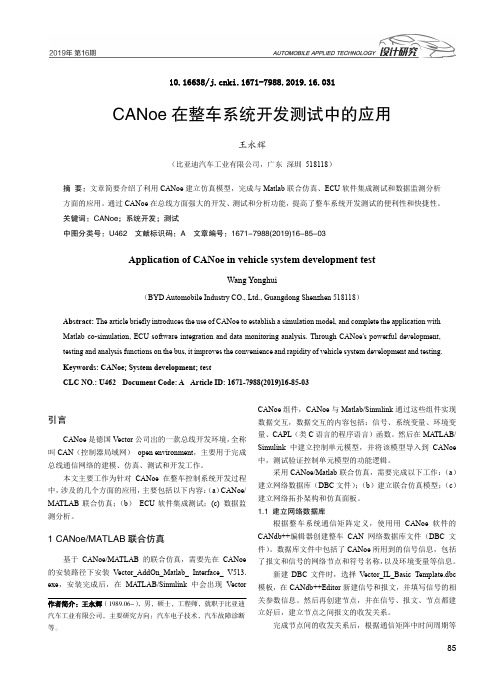
10.16638/ki.1671-7988.2019.16.031CANoe在整车系统开发测试中的应用王永辉(比亚迪汽车工业有限公司,广东深圳518118)摘要:文章简要介绍了利用CANoe建立仿真模型,完成与Matlab联合仿真、ECU软件集成测试和数据监测分析方面的应用。
通过CANoe在总线方面强大的开发、测试和分析功能,提高了整车系统开发测试的便利性和快捷性。
关键词:CANoe;系统开发;测试中图分类号:U462 文献标识码:A 文章编号:1671-7988(2019)16-85-03Application of CANoe in vehicle system development testWang Yonghui(BYD Automobile Industry CO., Ltd., Guangdong Shenzhen 518118)Abstract: The article briefly introduces the use of CANoe to establish a simulation model, and complete the application with Matlab co-simulation, ECU software integration and data monitoring analysis. Through CANoe's powerful development, testing and analysis functions on the bus, it improves the convenience and rapidity of vehicle system development and testing. Keywords: CANoe; System development; testCLC NO.: U462 Document Code: A Article ID: 1671-7988(2019)16-85-03引言CANoe是德国Vector公司出的一款总线开发环境,全称叫CAN(控制器局域网)open environment,主要用于完成总线通信网络的建模、仿真、测试和开发工作。
CANoe搭建V2X应用场景
C-V2X仿真测试之2D虚拟场景搭建探秘——CANoe.Car2x开启奇妙之旅前言V2X(Vehicle-to-Everything)通过现代通信与网络技术,实现车与外界的信息交换共享,从而帮助汽车实现安全、舒适、节能、高效行驶。
其中V代表车辆(Vehicle),X代表车辆(Vehicle)、路侧设施(Infrastructure)、人(Pedestrian)、网络(Network)等任何可与车辆进行信息交互的对象。
所以就有了车与车(V2V)、车与路侧设施(V2I)、车与人(V2P)、车与网络(V2N)的信息交互。
V2X既然应用于车辆,那CANoe这种常规专业工具是否支持V2X的开发、分析、仿真和测试呢?答案是肯定的,CANoe.Car2x就是为V2X设计的。
现在的CANoe Option.Car2x不仅完美支持欧洲标准、美国标准,更在不断更新以支持不断完善的中国标准,如《GBT 31024.3-2019合作式智能运输系统专用短程通信第3部分:网络层和应用》。
图1 Option.Car2x支持的协议基于国标V2X通信协议之上,汽车工程学会在《合作式智能运输系统车用通信系统应用层及应用数据交互标准T_CSAE 53-2017》中,定义了17个V2X一期应用场景。
下面,我们用CANoe搭建“道路危险状况提示”V2I 应用场景,用以介绍如何使用CANoe进行V2X的场景仿真。
图2 一期应用列表图片来源:《合作式智能运输系统车用通信系统应用层及应用数据交互标准T_CSAE 53-2017》HLW场景需求和场景设计需求来源需求来源于《T_CSAE 53-2017》对“道路危险状况提示”HLW的定义和HLW 场景图。
道路危险状况提示(HLW: Hazardous Location Warning)是指,主车(HV)行驶到潜在危险状况(如桥下存在较深积水、路面有深坑、道路湿滑、前方急转弯等)路段,存在发生事故风险时,HLW应用对HV驾驶员进行预警。
基于CANoe的CAN总线设计基础及简例

基于CANoe的CAN总线设计根底与简例CANoe概述CANoe是德国Vecto:公司开发的一套通用的CAN总线系统的开发、测试和分析工具。
CANoe的主要组成局部和各自功能为:●CANdb++编辑器:用CANdb++编辑器可以创立或编辑数据库文件(*.dbc)。
数据库文件中包括了CANoe所用到的信号的信息,这当中包括了报文和信号的网络节点和符号名称,以及环境变量等信息。
●CAPL浏览器:利用CAPL浏览器可以创立用于测量和模拟面板的CAPL程序。
因为数据库的应用,在编程时可以使用直观的报文和信号的名称,而不必使用二进制代码的报文头和数据。
●CANoe主程序:用于测量和模拟CAN系统。
通过File/Database菜单,可以在主程序中关联一个或多个数据库。
●面板编辑器:通过面板编辑器可以创立面板。
面板的作用是作为用户和在CANoe里的模拟面板里被模拟的网络节点的I/O接口。
除了标准按钮和开关,在面板编辑器中也可使用位图作为显示和控制器件。
可以使用任意的位图编辑软件创立适宜的位图,然后用十面板编辑器。
任何显示和控制兀件都要和数据库中的环境变量关联好,这样CAPL程序可以在CANoe主程序中读写显示和控制兀件。
使用CANoe进展开发的三个阶段使用CANoe的开发过程可以分为3个阶段:第一个阶段是利用数字仿真进展网络需求分析和设计阶段。
该阶段首先要定义网络里的通讯需求,包括:需要几个节点;在网络中要发送多少个报文;数据从哪个节点传输到哪个节点;每个报文的具体组成;有哪些外部的输入输出。
然后,利用网络数据库工具CANdb++建立起CAN通讯数据库。
接下来,建立网络拓扑构造,选择总线的波特率,定义节点的网络行为,使用CANoe建立各个网络节点的模型,并通过仿真来预估在设定波特率情况下的总线负载和延迟。
通过第一个阶段的仿真可以检验各个节点功能的完善性和网络的合理性,也可以监控网络负载和延迟。
第一阶段如图3-3所示。
canoe和python实例 -回复

canoe和python实例-回复标题:使用Python探索轻快的划船之乐导语:在我们的日常生活中,有许多机会和场景可以让我们去体验大自然的美妙和宁静。
而划船无疑是其中一种令人兴奋且令人放松的方式。
本文将介绍如何使用Python探索和可视化划船数据,帮助我们更好地了解这项运动,并提供一个实例来解释这个过程。
引言:划船是一项需要良好合作和均衡技巧的运动。
随着技术的进步,我们可以通过各种仪器来记录和分析划船的数据,以进一步提高我们的技巧和效率。
而Python作为一种强大的编程语言,为我们提供了许多工具和资源来帮助我们分析和可视化这些数据。
第一步:收集划船数据首先,我们需要一艘划艇和相应的传感器或设备来记录划船过程中的数据。
这些设备可以是GPS、加速度计甚至是心率监测器等。
这些设备记录的数据将成为我们在分析和可视化过程中使用的数据集。
第二步:使用Python读取和处理数据在我们开始分析数据之前,我们需要使用Python读取和处理数据。
对于不同的传感器和设备,有许多不同的数据格式和方法来读取和处理数据。
Python提供了丰富的库和工具来帮助我们处理各种数据格式,如CSV、JSON等。
我们可以使用pandas库来读取和处理数据,并使用numpy库来进行数值计算和处理。
第三步:数据清理和预处理在我们开始分析数据之前,我们需要对数据进行清理和预处理。
这包括填充缺失值、去除异常值以及进行数据平滑等。
Python的pandas库提供了许多函数和方法来帮助我们进行数据清理和预处理,如dropna()、fillna()和rolling()等。
通过这些函数和方法,我们可以轻松地处理数据集中的缺失值和异常值,并平滑我们的数据。
第四步:数据分析和可视化一旦我们完成了数据的清理和预处理,我们就可以开始进行数据分析和可视化了。
Python提供了许多强大的库和工具来帮助我们进行数据分析和可视化,如matplotlib、seaborn和plotly等。
【TBOX】基于CANoe实现的自动化测试方案

【TBOX】基于CANoe实现的⾃动化测试⽅案 为满⾜项⽬过程中不同阶段绝⼤部分测试需求,更⽅便快捷构造测试场景,⽀持异常场景测试。
更早介⼊,不依赖周边ECU的稳定情况,专注于被测ECU。
更经济,不加油,不充电,时间节省,物料节省等维度考虑。
我们需要⼀个建设测试台架⾄少可覆盖实车上80%的测试场景需求。
⽬标任务分解1、车内⽹络模型建⽴模拟车内⽹络通信模型,各节点信号仿真2、业务关联的ECU仿真封装ECU之间的业务交互逻辑,车⾝控制器,仪表台模拟等a)每个ECU的逻辑都是随CANoe启动,激活CAN通信;b)根据PEPS电源信号状态决定该ECU的活跃状态;c)ECU 根据具体业务处理总线上的请求;d)设计仿真器的ECU则根据信号变化情况,更新仿真器的状态CAPL编程实现1、环境变量为实现控制⾯板输⼊输出与信号同步,实现仿真器的状态更新,先定义与信号成映射关系的环境变量。
环境变量的定义主要根据各ECU的相关信号与业务的关联度决定。
基本上与T业务挂钩的信号都应该设置相应的环境变量,监控信号变化,实时更新仿真器的状态。
2、各ECU通⽤代码块存储⼀些全局变量,⽇志记录等,各ECU可包含此⽂件调⽤variables{// 报⽂发送周期,单位msconst int varCycTime10 = 10;const int varCycTime20 = 20;const int varCycTime50 = 50;const int varCycTime100 = 100;const int varCycTime200 = 200;const int varCycTime500 = 500;const int varCycTime1000 = 1000;// varCarType车型定义, 0=纯油, 1=纯电, 2=混动, others=error// 字母代码 AFV=纯油, EV=纯电, HEV=混动(不区分直插式和充电桩式)// 全局LOGlong mTrace = 0;//severitydword INFO = 1;dword WARN = 2;dword ERROR = 3;// 鉴权秘钥byte varESKCode[10][8] = {//。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
CANoe 入门Step by step系列(一)基础应用CANoe是Vector公司的针对汽车电子行业的总线分析工具,现在我用CANoe7.6版本进行介绍,其他版本功能基本差不多。
硬件我使用的是CAN case XL.1,CANoe软件的安装很简单,先装驱动,再装软件。
安装完成,插上USB,连接硬件,这样在控制面板中,Vector Hardware 进行查看通过查看信息可知,CANcaseXL中的两个piggy,一个是251(高速CAN),一个是7269(LIN),另外常用的还有1054(低速CAN,或称容错CAN),因为CANcaseXL中只能支持两路通讯,这样piggy可以自由组合2,硬件连接正常,打开CANoe软件File->New Configuration 可以选择新建工程的模版,我们这里选择CAN_500kBaud.tcn,这样新建了波特率为500K CAN工程,可以File->Save Configuration,进行保存3,接下来就要使用CAN db++ Editor工具对总线网络节点,消息,信号,进行定义了。
点击工具栏的这个图标,或开始菜单中找这个工具启动启动后,File->Create Database,选择CANTemplate.dbc,选择目录及文件名,进行保存右键Network nodes->New ,进行网络节点的定义,这里只需要填写Name即可,例如:Node_A然后添加Node_B,完成后如下图,这样在Network nodes目录下面添加出来两个节点节点添加完成后,下一步添加CAN消息,右键Messages->New,这是需要定义名称,ID,DLC等信息,如下:然后在Transmitters页面,点击Add按钮,添加Node_A为发送节点,意思就是说,此消息是从Node_A 节点发送出来的其实还有一种方法就是,此时暂时不定义发送节点,然后直接以拖曳的方式拖曳到发送节点上,功能上是一样的有了消息,消息里携带的东西自然是信号咯,那么我们开始创建一个信号右键Signals->New,填写如下信息信号当然要放到消息中咯,切换到Messages页面,Add 我们刚刚建立的Message_A,当然和上面一样,采用拖曳的方式从Signal到Message中建立关联也是可以的。
上面信息中Intel模式和Motorola格式的区别如下:用0和1来表示开关信号状态似乎还不是很直观,我们可以使用on和off来表示就好了,于是View->Value Tables,右键空白处->New,键入如下信息:定义好了之后,还需要跟信号进行关联。
右键需要关联的信号->Edit Signal,Value Table 中关联刚才建立的那个Value Talbe项这样一个信号就完成了,另外还需要加一个类似的信号,可以点击Signal根目录,在右边选择Signal复制,及粘贴,然后双击复制好的Signal后,进行一些编辑,然后用上面方法关联Message即可快速建立第二个信号了,是不是很方便继续添加第三个信号,Indicator_A,跟上面一样,但是我这个信号想放在Message的第二个字节的位置,怎么办?其实很简单,有两种方法:第一种,右键已经关联好的,即在Message目录下的信号,Edit mapped signal,在弹出的对话框中的Startbit中填8,这样就这个信号就跑到该消息的第二个字节中了。
第二种方法,右键该消息->Edit Message,在Layout页面中,拖动信号的色块进行移动以上Message_A消息及消息下所定义已经定义完成如法炮制另外一个消息Message_B,完成后如下图。
下面创建环境变量,右键Environment variables陆续把其他环境变量加好,Indicator的Access属性为Write哦,加完如下:数据库的定义这款基本上就OK了。
保存后关闭CANdb++ Editor,回到CANoe主程序中。
请在Configuration->Options->Configuration Settings->Channel Usage 设置使用的通讯通道,因为这个只需要1路CAN,其他都设置为0就可以。
点这个选项页面可出现Simulate Setup 界面右键Databases->Add,把刚刚创建好的dbc给加载进来,之后再连线上右键->Insert Network Node结果如下:右键这个ECU模块->Configuration,在Network Node 选择Node_A,完成,然后添加Node_B完成后如下图,这样dbc与CANoe的关联就好了。
4,界面设计网络及相应的关系设置好之后,应该设计界面了,一个良好的界面可以直观的显示及控制各种信号。
界面设计工具有两种:一种是Panel Designer,新的界面设计工具,另外一种是Panel Editor是老的界面设计工具,无论采用何种工具设计的界面,都可以和CANoe很好的兼容,没有问题。
下面我们先用第一种界面设计工具来完成界面的设计点击工具栏的这个图标或File->Open Panel Designer,打开界面编辑器,界面如下:保存一下该界面,起名为Panel_A,一个空的界面上可以放置右上边若干组件。
放置好之后,选中界面上的组件的时候,右下侧回显示当前选中的组件的属性,可以更改相应的大小位置等,但最重要的是Symbol属性,这里要说一下,每个界面组件也都需要与CANoe关联,否则单纯的界面是没有任何意义的,关联主要是信号和环境变量,在Symbol属性的Symbol Filter属性中可以进行选择,我们这里关联的是环境变量,所以选择Environment Variable,然后再点击上面的Symbol属性,然后在弹出的页面中选择相应关联的变量完成后可以按同样的方法设计Panel_B,也可以Save As 的方法快速建立同样的Panel但是与环境变量的关联和界面的文字需要进行微调。
这样两个Panel都已完成。
也已经建立了与CANoe之间的关联。
5,CAPL编程所有的前期准备工作和组装工作都已完成,现在需要编写程序使整个系统有机的运行起来。
回到CANoe的Simulation Setup界面,然后点击Node_A模块的,像铅笔一样的图标,填写程序名称,这里Node_A,然后打开编程界面,完成以下程序。
然后完成Node_B程序。
小技巧:如果背不出具体的消息名称,信号名称或环境变量,可以右键程序空白处,你会得到意外的惊喜,试试看。
OK大功告成6,运行现在点击工具栏,运行程序。
注意:这里表示实际的网络,所有的消息是发送到物理的网络上的,如果只是验证程序,设置成这样就可以了。
完整运行结果如下:就是这样,一步一步的,我们完成了第一个完整的CANoe应用工程,虽然这只是入门第一步,但整个CANoe 的开发流程基本涵盖,如果能跑出上面的运行结果,依然能够给我们很多的惊喜。
我们需要这样的惊喜,因为这是我们继续前行的动力。
CAPL就是Communication Application Programming Laguage的缩写,CAPL类似于C语言的语法,因此所有的语法请参考C语言教程,这里不在这里进行详述,关于C语言,毫无疑问的,首先推荐大家看谭浩强老师的书,经典中的经典,看完这本C语言应该没问题了。
CAPL在CANoe中起到重要的作用,他将所有的部分联系起来(请看下图)现在我们给予上一节的基础上,来着重介绍CAPL编程。
CAPL语法是C语言的,又有一些C++的特性,this指针,事件等,对于事件的理解可以学习任意一种面对对象语言,首推C#.NET,可以参考我的博客学习,当然这个似乎比CAPL本身更加难,事件也更加多,但这并不妨碍对事件的理解,其中的事件类型如下图:下面来几个小例子帮助理解来个CANoe版本的hello world!来兴奋一小下吧。
开整~在打开CANoe,新建个工程,在Simulation Setup中加个Network node ,点铅笔,忘了吗,上一节刚讲过,右键Start->New,键入如下代码编译后,关闭CAPL Brower。
运行CANoe工程,结果如下,哇塞成功咯,好有成就感啊。
这个例子似乎跟CAN通讯没啥太大关系啊,好,我们接下来再做一个例子运行结果如下,按键盘b键,将发送一个CAN消息,连dlc是啥都不知道的同学,推荐先学习一下CAN基础知识,推荐瑞萨公司的《CAN入门书》,讲的非常的好。
运行刚刚的那个例子你会发现,按一下b,只发送一条消息,但在实际应用中CAN消息都是循环连续发送的,我们要对刚刚的程序进行一些修改。
完成这样的功能。
程序如下:variables{message 0x400 msgA = {dlc=1};mstimer timerA;int conditionA = 0;}on key 'a'{conditionA = !conditionA;if(conditionA ==1){setTimer(timerA,200);}}on timer timerA{if(conditionA==1){setTimer(timerA,200);}msgA.byte(0) = msgA.byte(0)-1;output(msgA);}运行结果如下:按A键,Timer启动,发送消息接下来我们一起来看总结一下CAPL编程的要点:CAPL编程的学习,需要通过不断在实践中的积累,此外别无他法。
以上真真儿的只是入门,如果你真心看过,不如你真心写过。
最好的学习方式是什么?模仿。
有人会问,那不是山寨么?但是我认为,那是模仿的初级阶段,当把别人最好的设计已经融化到自己的血液里,变成自己的东西,而灵活运用的时候,才是真正高级阶段。
正所谓画虎画皮难画骨。
但初级阶段仍然是必须经历的过程,他会使你在达到高级阶段的过程中少走很多弯路,下面我们来迈出这一步。
先研究一下别人的简单例子。
最好的例子莫过于Vector本身的Demo了,这个在安装完CANoe之后就会被自动安装。
先看最简单的一个,名字叫Easy,但并不简单哦,比我们之前介绍的所有的东西都整合再一起了,很简单,但很全面。
但是假如你说,这个我自己也可以完全自己写出来(并不是仅仅是看懂哦),那么我可以肯定的说,在工作中,你完全可以胜任一般的任务要求哦~,剩下的只是工作量的问题了。
但我相信到现在为止,你们很多人,都无法写出这样的程序,所以我建议你们把这个程序好好的研究明白,这点很重要。