基于状态反馈的双馈风电机组传动链动态扭转载荷控制_刘颖明
双馈风电场新型功率协调控制策略研究
示为:
q w( t) = R M( t) +
∑ i = 1 C i( t)
M
(9)
式中ꎬ R M( t) 为残余信号ꎬ C i( t) 为第 i( i = 0ꎬ 1ꎬ
2n) 层固有模态函数ꎬ 并以频率由高到低依次
分布ꎮ 然后将 IMF 分量通过滤波器重构得到低频
段和高频段ꎬ 分别作为 DFIG 和 STATCOM 的参考
compensator ( STATCOM) . The complementary empirical mode decomposition algorithm ( CEEMD) is used to divide and
reconstruct the reactive power regulation required by wind farm merging nodes into two frequency bandsꎬ which are used as the
M
(5)
对剩余无功功率加入经 EMD 分解的噪声分量ꎬ
进行 EMD 分解:
R 1( t) + ( - 1) v a 1 E 1( n i( t) ) = F 2i ( t) + R i2( t)
图 2 无功功率协调控制框图
(6)
对上式 M 个固有模态分量 F 2i ( t) 结合平均后
得到第二个固有模态分量:
正负白 噪 声 能 够 完 全 消 除 白 噪 声 对 重 构 信 号 的
影响ꎮ
原始无功功率具体分解过程如下:
1) 对原始无功功率信号 q w( t) 中加入正负白
噪声 ( - 1) v a 0 n i( t) 后对信号进行一次 EMD 分解:
q w( t) + ( - 1) v a 0 n i( t) = F 1i ( t) + R 1i ( t)
基于飞轮—蓄电池混合储能的风电功率平滑控制
基于飞轮—蓄电池混合储能的风电功率平滑控制刘颖明;王维;王晓东;郑帅【期刊名称】《低压电器》【年(卷),期】2017(000)013【摘要】飞轮储能具有响应速度快、功率密度大、循环寿命长、相对成本低等优点,很适合用来补偿波动频率大但幅值较小的功率波动.用飞轮储能代替目前广泛使用的超级电容器,提出了基于飞轮-蓄电池混合储能的风电功率平滑控制方案,并依此研究功率分配优化方法.对风力发电的输出功率进行傅里叶变换,得到功率波动频谱图,然后根据功率波动的频谱图及两种储能装置的功率限值,采用低通滤波的方法来确定飞轮储能和蓄电池的功率分配参考值.为防止蓄电池的荷电量及飞轮电机转速出现越限情况,采取模糊控制策略对蓄电池和飞轮储能的参考功率进行实时修正,优化储能功率的分配.系统仿真结果验证了该方法的有效性.【总页数】6页(P22-27)【作者】刘颖明;王维;王晓东;郑帅【作者单位】沈阳工业大学电气工程学院, 辽宁沈阳 110870;沈阳工业大学电气工程学院, 辽宁沈阳 110870;沈阳工业大学电气工程学院, 辽宁沈阳 110870;沈阳工业大学电气工程学院, 辽宁沈阳 110870【正文语种】中文【中图分类】TM614【相关文献】1.基于飞轮-蓄电池混合储能的风电功率平滑控制 [J], 刘颖明;王维;王晓东;郑帅;2.基于超短期风电功率预测的混合储能控制策略研究 [J], 李燕青;袁燕舞;郭通;王子睿;仝年;史依茗3.基于蓄电池-超级电容混合储能的风力发电功率平滑控制 [J], 阚志忠;柴秀慧;靳本豪;何雄;林洋4.基于SMES/BESS混合储能抑制风电功率波动的控制策略 [J], 潘生雄; 赵霞; 罗映红; 金洪涛5.风电系统中飞轮和蓄电池混合储能的控制策略 [J], 迟英新;赵志刚;徐洪伟;唱通因版权原因,仅展示原文概要,查看原文内容请购买。
基于振动监测的风机传动链故障诊断

摘要:能源是经济持续健康发展的关键。
煤炭、石油、天然气等石化能源已不再符合绿色、清洁、环保、可持续发展的需要,用可再生新能源替代传统石化能源是我国能源可持续发展的必然选择。
风能由于具有绿色、清洁、可再生等优势,近年来随着风力发电技术的成熟越来越得到国家重视,已成为我国改善能源供给结构的重要支撑。
然而风电机组一般所处的自然环境恶劣,常在变速变载条件下工作,工况极为复杂,随着风机运行年限的增长,故障频发。
除电气外,易发故障的部件主要在传动系统,包括主轴、齿轮箱、发电机、轴承等,而风机传动系统故障大多又与振动异常相关,由此造成的损失也更大。
因此,对风电机组传动链振动进行监测、分析与诊断,对故障提前预警,有助于风机的预防性运维,保障机组可靠稳定运行。
本文在对振动测试相关理论和时域分析、频谱分析、包络分析等振动信号分析处理技术阐述基础上,结合风机结构特点,对传动链中如何实施振动监测、如何对采集的振动信号进行有效分析,以及如何依靠监测数据快速准确诊断机组故障进行了论述。
关键字:振动监测;风机;传动链;故障诊断人类生存和发展需要能源的支撑,风能作为一种清洁可再生资源,近二十来年受到世界各国的高度关注,已成为解决能源危机、响应环境保护的重要能源。
在政府的大力扶持下,我国风力发电行业得到快速发展,到2020年底,并网风电场近5000座,累计装机容量将突破2.6亿kW,在运风力发电机组超过13万台。
风电的快速发展给新能源行业带来市场机会的同时,也带来了巨大的运检挑战。
由于大多数风电场建在深山、草原、海岛、高原等自然环境恶劣区域,风力发电机组需长期在雨雪、风沙、雷电、冰冻等环境中运行,风速、风向又具有极大的不稳定性与不确定性,大多在变速变载条件下工作,工况极为复杂。
伴随风电场投运年限增长,风力发电机组内部传动部件易发生故障,实际上由于机械部件的不平衡、疲劳、磨损、断裂、胶合等问题引起的故障目前已成为风力发电机组的主要故障。
基于扰动观测器的双馈风电机组最优复合反馈控制研究
基于扰动观测器的双馈风电机组最优复合反馈控制研究
吴晓月;王冰;陈玉全;程明曦;曹智杰
【期刊名称】《微电机》
【年(卷),期】2022(55)10
【摘要】双馈风电机组的转子通过变流器连接到电网,由于在转子侧的硬件电路中含有开关模块,使系统在运行过程中极易产生谐波扰动,该谐波会增加风机的损耗,使风机运行不稳定,减低电能质量。
针对这些问题,首先设计了一种最优复合反馈控制器,使无扰动风机系统工作在稳定状态;然后,对含谐波扰动的风机系统,设计扰动观测器,观测出谐波扰动并在输入端进行抵消,使含谐波扰动的风机系统能够快速到达稳态;最后,通过仿真验证了设计的扰动观测器能够准确观测出谐波扰动,控制策略能够使双馈风电机组系统快速到达稳定状态。
【总页数】7页(P76-81)
【作者】吴晓月;王冰;陈玉全;程明曦;曹智杰
【作者单位】河海大学能源与电气学院;南京豪庆信息科技有限公司
【正文语种】中文
【中图分类】TM315;TP273
【相关文献】
1.风电双馈机组基于协同控制的低电压穿越策略研究
2.基于双线性观测器的双馈风电机组变流器功率管开路故障诊断
3.基于状态观测器的双馈风电机组变流器开关管开路故障检测
4.双馈风电发电机组高电压穿越的研究现状
因版权原因,仅展示原文概要,查看原文内容请购买。
基于寻优算法的双馈风机变流器动态运行控制参数辨识
基于寻优算法的双馈风机变流器动态运行控制参数辨识
董福杰;刘颖明;王晓东;赵宇;王宇
【期刊名称】《电力科学与工程》
【年(卷),期】2024(40)3
【摘要】针对运行过程中双馈风机变流器控制参数难以获取的问题,提出了一种基于自适应混沌粒子群算法的转子侧变流器参数辨识方法。
首先,基于机组实际运行下可量测电气量时间序列,建立双馈风机变流器控制系统离散化数学模型;然后,根据不同观测电气量下参数的轨迹灵敏度,对辨识难易程度进行分析;最后,利用自适应混沌粒子群算法对变流器PI控制参数进行辨识。
仿真实验结果验证了所提出辨识方法的准确性与可行性。
【总页数】9页(P61-69)
【作者】董福杰;刘颖明;王晓东;赵宇;王宇
【作者单位】沈阳工业大学电气工程学院
【正文语种】中文
【中图分类】TM614;TP273
【相关文献】
1.基于改进免疫遗传算法的双馈风机控制系统PI参数优化
2.面向双馈风机的分层型免疫协同进化粒子群算法多参数辨识
3.基于LSTM神经网络的双馈风机控制参数辨识方法
4.动态响应误差驱动的风机并网变流器控制参数辨识方法
因版权原因,仅展示原文概要,查看原文内容请购买。
基于风场AGC调度控制的三区域控制法
基于风场AGC调度控制的三区域控制法李振华;曹积欣;董玲玲【摘要】针对电网调度中心对风场的自动功率调度目标要求,在分析MW级双馈变桨风机机组运行特性的基础上,采用传统的PID控制为基础、结合控制保护区域检测单元、机组控制输出保护单元组合的三区域控制系统建立的风场有功控制单元,针对莱州风电场进行AGC控制测试,证明三区域控制系统具有良好的系统控制性能.【期刊名称】《电气自动化》【年(卷),期】2014(036)001【总页数】3页(P51-53)【关键词】PID控制;双馈变桨风机;AGC(自动发电控制)【作者】李振华;曹积欣;董玲玲【作者单位】山东华能莱州风力发电有限公司,山东264000;山东华能莱州风力发电有限公司,山东264000;山东华能莱州风力发电有限公司,山东264000【正文语种】中文【中图分类】TP290 引言为提高风电并网运行的技术和管理水平、优化风电并网调度运行,为实现风电功率预测预报为辅助手段的各类电源协调运行、提高调度能力的具体目标,电力调度机构要按照有关法律法规和技术标准要求,加强风电调度管理,在保证电力系统安全稳定运行的前提下,实现风电等可再生能源的优先调度和全额收购目标要求。
因此风电场必须具备低电压穿越技术,风场负荷预测系统、风电场在线负荷控制技术,风电场在线负荷控制技术主要控制的是完成电力调度机构对风场下发的负荷目标进行有效的目标跟踪控制,将负荷控制稳态、无差地运行在目标状态之中,即风场统称的AGC调度运行控制。
1 三区域控制法对于风电场在线负荷控制技术,可以认为是实现最优控制,控制的准则是指满足JITAE为最小的控制方式,可采用表达函数为:其中e(t)为控制和目标的偏差,τs为过渡时间[1]。
由于风场的风速具有随机性,风速的变化相对规律比较难于预计,同时短期风速的变化不会太大,因此系统的误差过渡跟踪时间是可以根据风速的变化趋势范围加以定性控制的,不同的风速范围变化决定不同的系统过渡控制时间常数,通过优化修正控制确保系统的稳定性和鲁棒性,具体的系统控制如图1所示。
双馈风电机组的通用型机电暂态模型及其电磁暂态模型的对比分析
双馈风电机组的通用型机电暂态模型及其电磁暂态模型的对比分析刘其辉;韩贤岁【摘要】The computing speed of electromagnetic transient model forwind power system is very slow because of its complexity. To solve this problem, a general electromechanical transient model is studied, in which there are not electrical components and high frequency switching device, and it only consists of pure mathematic calculations, is simple and has fast calculation speed. There are four parts including wind speed model, wind turbine control, generator/convertor model, and electrical control model. By comparing the simulation results of this electromechanical transient model with electromagnetic transient model in PSCAD, we found that the simulation time is reduced greatly and the results are agreeable basically, the simulation efficiency can be increased significantly at the same time guarantee the accuracy of the calculation accuracy. The electromechanical transient model provides reference model for simulation and modeling of large scale grid-connected wind farm and is of great practical value.%针对风力发电系统的电磁暂态模型复杂、计算速度慢的问题,研究了一种风力发电系统的通用性机电暂态模型。
推荐国家技术发明奖项目公示 项目名称 双馈式风电装备故 …
推荐国家技术发明奖项目公示项目名称 双馈式风电装备故障预警与稀疏诊断技术推荐单位 教育部推荐单位意见:我单位认真审阅了该项目推荐书及附件材料,确认全部材料真实有效,相关栏目均符合国家科学技术奖励工作办公室的填写要求。
该项目针对风电装备变转速运行所导致的整机非恒速监测预警、传动系统行星增速齿轮与轴承诊断等瓶颈,通过7年的深入系统研究,提出了变转速自适应与稀疏诊断的新思路,发明了系列监测诊断技术,突破了风电装备监测诊断瓶颈;所研制的监测诊断系统通过中国计量科学研究院、中国测试技术研究院等检测;教育部鉴定意见为:总体国际先进、“旋转设备变转速监测诊断方法处于国际领先水平”;已在我国100多个风场的风电装备上安装使用,取得了显著经济效益与社会效益。
对照国家技术发明奖授奖条件,推荐该项目申报2016年度国家技术发明二等奖。
项目简介:双馈式风电装备状态监测与故障诊断是维护其可靠运行的重要保障。
随着全世界风电装机容量的迅速发展,故障导致的停机时间已占其额定发电时间的25.6%,维护费用高达风电装备总收入的20-25%,迫切需要研制开发风电装备监测诊断技术。
但风电装备呈现变转速运行的特点,导致其监测诊断中整机非恒速监测预警、传动系统行星增速齿轮与轴承诊断困难。
本项目通过7年的深入系统研究,主要发明点如下:1、通过数千台风电装备现场振动数据的测试、挖掘与建模,揭示了风电装备变转速等工况与振动监测指标的关联规律,发明了风电装备整机运行状态指标异常预警方法,实现了风机振动巡检与有效评估;2、结合风电装备传动系统的变转速运行与典型故障机理,发明了变转速稀疏诊断方法,实现了风电装备传动系统行星增速齿轮与轴承的准确诊断;3、发明了风电装备传动系统复合故障稀疏解耦的诊断方法,通过机械故障物理特征先验与稀疏模型映射,实现了复合故障特征一次性稀疏解耦;4、利用上述理论和发明的方法,研制开发了风电装备状态监测与故障诊断系统,系统符合国际CE电磁兼容性指令,通过中国计量科学研究院等检测,诊断准确度95%以上。
基于双馈感应风力发电机组的VSC控制策略研究
转换 成 同步旋转 d q 轴, 并进行 电压 定 向矢量控 制 , 使 , , z 分 别控 制有功 和无 功功 率 , z , , 的正 负可 控制 有功 功率 的双 向流动 。 其 关系表 达式为 :
作 原理 类 似 , 只 是 控制 目标不 同 。 网侧 变换 器 主要 控 制直 流母 线 电压 稳 定及 调 节 电网 侧 的功 率 因数 , 可 以实 现风 力 发 电系统 的 无功 调 节 灵活 控制 。 另 外 一 转 子侧 变流 器 也是 与 电网侧 变流 器进 行协 凋控 制 , 实 现能量 双 向 流动 的重 要
应 式风 力 发 电机组 采 用 的是 双馈 异 步 发 电机 , 它 有 转子 和定 子 两套 绕 组 , 其 中定 子 与 电网直 接 相连 , 转子 则通 过变 流 器 与 电网相 连_ 。 I 与直驱 式 风力 发 电机 组 采用 的同 步发 电机 相 同 的是 , 它 们 同样 具 有 独立 励磁 的 装置 , 可 以按 需要 改变 功 率 因数 , 只 不过双 馈 异 步发 电机采 用 的是 交 流励 磁 , 而同 步 发 电 机采 用 的是 直 流励 磁 。 而与 同步 发 电机 不 同的 是 , 同步 发 电机 只 能用 调节 励 磁 电流 的幅值 的方 式 来调 节无 功功 率 。 而 双馈 异步 发 电机通 过交 流励 磁调 节 励 磁 电流的 幅值 频 率 相位 , 从 而 实现 双 馈风 力 发 电机 的变 速恒 频 运行 , 并 调 节 发 电机 的有 功 功 率【 4 一 I 。 电压 源 变 流器 ( Vo l t a g e S o u r c e Co n v e r t e r , V S C) 在 双 馈 感 应风 力 发 电机 组 中是 必不 可 少 的 , 它 的功 能 是 向转 子绕 组提 供 交 流励 磁 ,通 过 改变 交 £ 3定 一 ,_ 流 励磁 电压 电流幅值 、 相 位和频 率 来控 制定 子绕 组 的输 出频率 和 电压恒 的 电能” ~ I 。 双馈 感 应风 力 发 电机 中的变 流器 具有 能 量双 向 流动 的功 能 。 根 据发 电机 的转速 的不 同 , 变 流器 的 工作 方 式也不 同 , 当电机 运行 于亚 同R 步速 时+ , 转 0 3 — 2 = 对转 = 子 从 转子 侧 变流 器 吸收 能量 ; 当 电机 运 行于 同 步速 时 , 变 流器 子进 行 商 流 励磁 ; 当 电机运 行于 超 同步速 时 , 变 流器 电机 转 子 向外输 送能量 , 发 电机 通 一 一 . 叫 过 变 流器 将 电能 馈 送到 电网[ 9 1 2 I 。 网侧 变 流器 的 工作 原理 与转 子 侧变 流 器 工
双馈风力发电机功率解耦模糊控制器的设计
双馈风力发电机功率解耦模糊控制器的设计姚兴佳;刘中亮;邢作霞【摘要】从风力机和双馈感应电机(DFIG)的基本原理入手,建立了风力机的数学模型,并建立了基于定子磁链定向的双馈风力发电机动态数学模型;针对DFIG双闭环控制系统功率外环PI调节器自适应能力较差的缺点,提出了用Fuzzy-PI控制器代替功率外环PI调节器.与传统PI控制器相比,Fuzzy-PI控制策略对有功功率跟踪速度快、超调量小,仿真结果也表明了Fuzzy-PI控制器具有优良的动、静态性能,并验证了控制策略的可行性.【期刊名称】《沈阳工程学院学报(自然科学版)》【年(卷),期】2011(007)002【总页数】6页(P97-102)【关键词】变速恒频;双馈感应电机;Fuzzy-PI;解耦控制【作者】姚兴佳;刘中亮;邢作霞【作者单位】沈阳工业大学,风能技术研究所,沈阳,110023;沈阳工业大学,风能技术研究所,沈阳,110023;沈阳工业大学,风能技术研究所,沈阳,110023【正文语种】中文【中图分类】TM6140 引言随着风力发电技术迅猛发展,变速恒频风力机组(VSCF)已经成为当今国际社会风力发电机组的主流机型[1].在变速恒频风力发电系统中,交流励磁风力发电控制方案最具优势[2-3].控制转子励磁电流的频率,可以实现变速恒频;控制转子励磁电流的幅值和相位,可以实现DFIG输出有功功率和无功功率的解耦控制.双馈风力发电机是一个高阶、多变量、非线性、强耦合的机电系统,它的最大优点是可以实现功率的双向流动.为实现不同的控制目的,双馈电机可有多种建模方式和控制策略.文献[4]提出了并网型气隙磁场定向控制的双馈发电机数学模型;文献[5-6]提出了并网型定子磁场定向控制的双馈风力发电机数学模型;文献[7]提出了基于电网电压定向的矢量控制策略.从国内外文献可以看出,目前大多数双馈风力发电机虽然都在同步旋转坐标系下采用矢量控制,通过常规的PI调节,基本可以实现有功和无功的独立调节.但仍存在如下问题:①传统的PI调节器在驱动系统整个运行范围内很难提供理想的动态性能,控制性能下降的主要原因是系统的非线性和参数变化[8].② PI参数难以调节,定子有功功率PI调节器自适应能力较差.因此,传统的矢量控制难以满足系统控制精度以及动态性能的要求.Fuzzy-PI控制动态响应快,超调量小,能够减小稳态误差[9-10].针对传统PI 控制器存在的问题,这里在建立风力发电机组数学模型基础上,采用Fuzzy-PI控制器代替传统矢量控制环节中的PI调节器;与传统PI控制器相比,Fuzzy-PI控制器跟踪速度快、超调量小,仿真结果也表明了Fuzzy-PI控制器具有优良的动、静态性能,并验证了控制策略的可行性.1 风力机的数学模型风力机的第一个气动理论是由德国的贝兹(Betz)于1926年建立的.假定气流经过整个风轮扫掠面时是均匀的,并且气流通过风轮前后的速度均为轴向[17].根据该理论,风机实际能够从风中捕获的机械功率和转矩可用下式表示:式中,ρ为空气密度,kg/m3;A为通过风轮的气流截面积,m2;υ为风速,rad/s;λ为叶尖速比;ωtur为风轮的角速度,rad/s;R为风轮半径,m;PM为风机捕获的机械能,W;TM为风机捕获的机械转矩,N·m;CP(λ,β)为风能利用系数,它是叶尖速比λ与桨矩角β的函数[18]:图1为桨矩角β为不同角度时CP-λ关系曲线.由图可知,一定风速下,当风轮节距角β一定时,CP仅为叶尖速比λ所决定.图1 CP-λ关系曲线2 变速恒频双馈感应发电机工作原理2.1 变速恒频风力发电系统工作原理变速恒频风力发电系统主要由风力机、双馈感应发电机、控制器和变频器组成.风力机作为原动机带动发电机转子旋转,定子绕组与电网相连,转子绕组通过可逆变频器与电网相连.双馈风力发电机定子输出电压频率f1为式中,n为转子转速;f2为转子电流频率;NP为双馈风力发电机的极对数.由式(5)可得,根据转子的转速,通过调整转子侧三相励磁电流的频率,可保证定子侧频率恒定.当转子转速低于同步速时,f2取“+”;当转子转速超同步速时,f2取“-”;当发电机转子转速等于同步速时,f2=0,此时变频器向转子提供直流励磁.2.2 双馈风力发电机d-q坐标系下的数学模型定子侧和转子侧都取电动机惯例,理想条件下,可列写出双馈发电机在同步旋转坐标系下的数学模型.磁链方程电压方程为电磁转矩和运动方程为式中,p为微分算子;u为电压;i为电流;ψ为磁链;R为电阻;L为电感;Lm为定转子间互感;ω1和ω2分别为电机同步角速度和转差角速度,且ω2=ω1-ωr=sω1,ωr为电机转子角速度,s为转差率,J为转动惯量;Np为电机极对数;Tem、Tm分别为电磁转矩和机械转矩,下标s和r分别代表定子侧电量和转子侧电量.2.3 基于定子磁链定向的DFIG数学模型对于并网型风电系统,可忽略定子电阻的影响,为简化控制,可采用基于定子磁链定向的控制策略,此时电压方程可简化为式中,ims定义为励磁电流,ims=ψs/Lm;σ定义为漏感系数,σ =1 -L2m/Ls Lr. 转矩方程为定子侧有功功率为定子侧无功功率为从式(11)、(12)、(13)可以看出,控制转子侧电流iqr,可以控制定子侧有功功率Ps与电磁转矩Te;控制转子侧电流idr,可以控制定子侧无功功率Qs;从而实现了双馈电机的功率解耦.3 Fuzzy-PI控制器的设计双馈风力发电机组多采用串级双PI结构控制系统,外环为功率控制环,内环为电流控制环,根据双馈发电机的运行特点和控制要求,这里提出了模糊PI控制策略.电流内环因响应速度快,仍选用传统的PI调节器,功率外环则选用模糊PI控制器(Fuzzy-PI Controller),通过不断计算功率的偏差e和偏差变化率ec,自动修正PI控制器参数K p和K i,从而使被控对象具有更好的动静态性能.3.1 电流内环的设计电流环的传递函数如图2a、2b,T s是采样周期,一般要求T s远小于图2 电流环的传递函数令,则校正后的电流环开环函数为为了达到电流环系统的二阶最优模型的动态性能,应该令ε =0.707,即得到故电流环PI调节器的参数为由于d、q轴电流环传递函数相同,故可省略q轴电流环PI调节器设计.3.2 功率外环的设计确定电流内环PI调节器的参数后,把电流环看作功率调节系统中的一个环节,再设计功率调节器.忽略传递函数的高阶项,电流内环闭环传递函数可以简化为以有功功率的控制为例,可以采用极点配置的方法设计外环控制器,功率外环传递函数如图2b所示.T p是采样周期.经过整理,功率外环的闭环传递函数可以写为式中根据式(20),若希望系统的极点为则功率外环PI调节器的参数为3.3 模糊控制器的设计取TS=5 ×10-3,Tp=10-5 s,代入式(17)、(18),得到电流环PI调节器的参数Kp=29.2,Ki=0.4;由式(21)、(22)、(24)、(25)可得功率外环 PI调节器的初值为Kp=21.7,Ki=3.3.故取偏差e与偏差变化率ec为模糊控制器的输入,其论域分别为{-1,1}和{-0.01,0.01};取控制量的 Kp、Ki为模糊控制器的输出,其论域分别为{0,40}和{0,5};偏差e的语言变量为{NL,NB,NM,NS,Z,PS,PM,PB,PL},偏差变化率 ec的语言变量为{NB,N,M,P,PB},输出 Kp、Ki的语言变量都为{VS,S,M,L,VL}.为了研究方便,选偏差e的隶属度函数为三角形函数(trim f),偏差变化率ec的隶属度函数为梯形函数(trampf),如图3所示.模糊控制规则如表1所示.表1 kp模糊控制规则ec e NB N M P PB NL VL VL VL S S NB VL VL L L L NM VL VL M L M NS L L S S VS Z VL M VS VS VS PS L L S S VS PM M M M S VS PB M M L VS VS PL M L VL VS VS图3 模糊PI控制器的输入输出隶属函数表2 ki模糊控制规则ec e NB N M P PB NL VS VS VS S M NB VS VS S S M NM VS VS M M M NS VS VS L M L Z VS S VL L VL PS S M L L VL PM M M M VL VL PB M L S VL VL PL M VL VS VL VL图4和图5分别为比例增益和积分增益与控制器有功功率误差关系曲线.从中可以看出,Kp、Ki可以根据e和ec的变化,参照模糊控制规则表自动调节因子,当e≈0且ec≈0时,Kp曲面比较平坦,近似为一个平面,而Ki曲面较Kp曲面微微偏凸.这表明当系统进入稳态时,Kp值基本不变,主要依靠调节Ki值来消除系统的稳态误差,验证了模糊控制策略的可行性.图4 比例增益与功率解耦控制器功率偏差e及偏差变化率ec关系曲线图5 积分增益与功率解耦控制器功率偏差e及偏差变化率ec关系曲线4 仿真结果分析根据上述控制器的设计方案,在Matlab/Simulink平台上搭建模型进行仿真,并与传统的PI控制结果进行分析比较.仿真实验中双馈发电机主要参数见表1,仿真框图如图6所示.将基于磁场定向的双闭环矢量控制结果与Fuzzy-PI控制结果进行对比,设t=5 s 时风速从10 m/s的基本风跃升为11 m/s左右的随机风,无功功率给定取0.图10(a)为双闭环矢量控制最优风速度跟踪曲线,图10(b)为模糊控制最优角速度跟踪曲线,从图10(c)(d)与(g)(h)可知,在随机风模式下,2种控制模式都可以实现功率的解耦,但Fuzzy-PI控制策略曲线比较平滑,这充分表明Fuzzy-PI解耦控制策略明显提高了发电机有功、无功解耦控制性能,动态性能好,鲁棒性强.图6 双馈风力发电系统模糊神经网络解耦控制结构图7 仿真结果比较5 结论提出了Fuzzy-PI控制器代替定子有功功率PI调节器的控制策略,构建了一个基于Fuzzy-PI控制的双馈风力发电系统模型并进行仿真研究.仿真结果表明,通过自调整模糊PI控制,能较好地实现系统定子有功、无功功率的解耦控制,系统结构简单,动态性能好,有功调节自适应能力强.表3 风机参数表风机参数额定功率 150 kW 风轮直径 14 m额定风速 12 m/s Cpmax 0.468齿轮箱变速比N 23.936 最佳叶尖速比 9空气密度 1.225 kg/m3极对数 4额定电压 575 V 额定频率 60 Hz定子电阻 Rs 0.007 06 p.u. 定子漏抗Xsl 0.017 1 p.u.转子电阻Rr 0.000 5 p.u. 转子漏抗Xrl 0.015 6 p.u.电机互感 Xm 2.9 p.u. 惯性系数 J 5.18 kg/m3参考文献[1]倪受元.风力发电讲座第二讲风力机的工作原理和气动力特性[J].太阳能,2000(3).[2]林成武,王凤翔,姚兴佳.变速恒频双馈风力发电机励磁控制技术研究[J].中国电机工程学报,2003,23(11).[3]刘其辉,贺益康.交流励磁变速恒频风力发电机的运行控制及建模仿真[J].中国电机工程学报,2006,26(5).[4] M itsuloshi Yamamot.Active and Reactive power Control for Doubly-fed Wound Rotor Induction Generator IEEE Trans.On Power Electronics,1991,6(4):624 -625.[5] Pena R,Clare J C,Asher G M.Doubly fed induction generator using back-to-back PWM converters supplying anIsolated Load from a variable-speed W ind Turbine[J].Electric Power Applications,IEEE Proceedings,1996,143(5).[6] Pena R,Clare J C,Asher G M.Doubly fed induction generator using back-to-back PWM converters and its application to variable-speed w ind-energy generation[J].Electric Power Applications,IEEE Proceedings,1996,143(3).[7]李辉,杨顺昌,廖勇.并网双馈发电机电网电压定向励磁控制的研究[J].中国电机工程学报,2003,23(s):159-162.[8]王成元,夏加宽.现代电机控制技术[M].北京.机械工业出版社,2009.[9] Hany M.soloumah,Narayan C.Kar.Fuzzy Logic Based Vector Control of a Doubly-Fed Induction Genrarator in W ind Power Application[J].W IND ENGINEERING,2006,30(3):201 -224.[10]陈炜,肖丹.双馈风力发电系统空载并网模糊PI控制[J].太阳能学报,2009,6,30(6).[11] Jyh-Shing,Roger Jang.ANFIS:Adaptive-Network-Based Fuzzy Inference System[J].IEEE TRANSACTIONS ON SYSTEMS,MAN AND CYBERNETICS,1993,23(3).[12]苑国锋,李永东.1.5MW变速恒频双馈风力发电机组励磁控制系统试验研究[J].电工技术学报,2009,2,24(2).[13]柴天佑.多变量自适应解耦控制及应用[M].北京.科学出版社.[14]于浩洋,宋青昆.基于matlab\simulink自调整因子模糊控制器的设计与仿真[J].微型机与应用,2003,4.[15]章卫国,薛璞.在线自调整模糊控制器的设计[J].自动化仪表,19(2). [16]邢作霞,钟明舫,姚兴佳.大型风力发电机组技术发展趋势[J].风力发电论文集,2002,10(11).[17] Mullane A,Lighthody G.W ind-turhine fault ride-through enhancement[J].IEEE Transon Power Systems,2005,20(4):1929-1937. [18] Slootweg J G,Kling W L,Polinder H.Dynamic modeling of a wind turbine with doubly fed induction generator[C].Power Engineering Society Summer Meeting,2001,1:644 -649.。
[精品]风力发电技术第三章双馈式变速变桨风电机组运行控制PPT课件
![[精品]风力发电技术第三章双馈式变速变桨风电机组运行控制PPT课件](https://img.taocdn.com/s3/m/11641859fab069dc502201a8.png)
2008.6.20
华北电力大学 刘其辉
版本1.0
第三章:双馈式变桨变速风电机组控制
几种典型总体控制方案
2008.6.20
华北电力大学 刘其辉
版本1.0
第三章:双馈式变桨变速风电机组控制
方案一 *
切入风速
并网区
MPPT区
额定风速
切出风速
转速限制区
功率限制区 切出停机区
变桨控制合适 转速;发电机 控制空载电压 ,符合并网条 件时并入电网
流侧电压
IPM驱动电路
信号 采集 电路
信号 前级 处理 电路
ua,b,c
ia,b,c DSP2最小系统及 udc 扩展输入输出电路
机侧变换器
IPM驱动电路
电 网
电网电压、定子 电压、电流、转 子电流、转速
ua1,b1,c1 信号 DSP1最小系统及 ia1,b1,c1 前级 扩展输入输出电路 uas,bs,cs 处理
2008.6.20
华北电力大学 刘其辉
版本1.0
第三章:双馈式变桨变速风电机组控制 二. 运行区域及控制目标
➢ 主要运行区域 ➢ 各运行区域的控制目标
2008.6.20
华北电力大学 刘其辉
版本1.0
第三章:双馈式变桨变速风电机组控制
(一)主要运行区域
1.运行区域的划分 一般按照风速和机组运行特性分为 五大运行区域:
3. 主从分布式控制系统
主控制器(PLC, PID控制算法)
变桨控制 偏航控制 制动控制 参数监视与远程通讯 系统级控制协调
2008.6.20
华北电力大学 刘其辉
版本1.0
第三章:双馈式变桨变速风电机组控制
主控制器实现案例
降低风力发电机组停机时动态载荷的系统及其控制方法[发明专利]
![降低风力发电机组停机时动态载荷的系统及其控制方法[发明专利]](https://img.taocdn.com/s3/m/a384ab88ddccda38366baf95.png)
专利名称:降低风力发电机组停机时动态载荷的系统及其控制方法
专利类型:发明专利
发明人:王化然,龙乔林,许坤明,展娅琼,周永全
申请号:CN201810091074.9
申请日:20180130
公开号:CN108317039A
公开日:
20180724
专利内容由知识产权出版社提供
摘要:本发明涉及风电生产技术领域,具体涉及一种降低风力发电机组停机时动态载荷的系统与方法。
该系统包括风力发电机组和制动系统,风力发电机组包括塔筒、机舱、制动系统包括至少风轮制动器,用于风力发电机组的载荷感应的传感器和与传感器连接的逻辑电路,传感器感应风力发电机组动态载荷参数,发出典型的动态载荷信号;逻辑电路受动态载荷信号,作为对动态载荷信号的响应,确定信号表明的动态载荷水平。
控制方法,包括A)传感器感应风力发电机组动态载荷的参数,确定感应到的参数是否等于选定值;B)当感应到的参数等于或大于选定值时,逻辑电路通过允许停止状态下的叶片风轮进行间歇性滑动来减少风力发电机及其配套塔筒的动态载荷。
申请人:云南能投海装新能源设备有限公司
地址:650500 云南省昆明市昆明经开区大冲片区(云南能投产业投资公司内)
国籍:CN
代理机构:北京联瑞联丰知识产权代理事务所(普通合伙)
代理人:郑自群
更多信息请下载全文后查看。
双惯量弹性系统状态观测器设计与实现
双惯量弹性系统状态观测器设计与实现
王浩;郝亮;杨明;徐殿国
【期刊名称】《电气传动》
【年(卷),期】2013(0)S1
【摘要】双惯量弹性系统中,由于传动轴系存在弹性,会产生机械谐振现象,为了较好地抑制谐振,需要将部分或全部系统状态反馈回控制器,一部分系统状态(如负载转矩、转速、轴矩等)直接测量存在困难,因此需要对其进行估测。
首先研究了Luenberger观测器的基本结构,在此基础上,通过双惯量弹性系统的离散化状态方程,设计了用于观测系统状态的观测器模型,并对此进行了仿真分析与实物测试,将系统状态的观测值与测量值进行对比,当观测器极点配置在合适位置时,可以得到较好的观测效果。
【总页数】4页(P48-51)
【关键词】双惯量弹性系统;Luenberger观测器;状态反馈控制;状态方程
【作者】王浩;郝亮;杨明;徐殿国
【作者单位】哈尔滨工业大学电气学院
【正文语种】中文
【中图分类】TM921
【相关文献】
1.基于状态观测器的风电机组单机储能系统虚拟惯量控制 [J], 王晓东;李凯凯;刘颖明;程红辉
2.雷达伺服系统状态观测器的设计与实现 [J], 无
3.基于未知动态观测器双惯量伺服系统低频主动谐振抑制 [J], 王树波;李冬伍;任雪梅
4.双惯量弹性系统负载扰动观测器设计研究 [J], 郎志;杨明;徐殿国
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
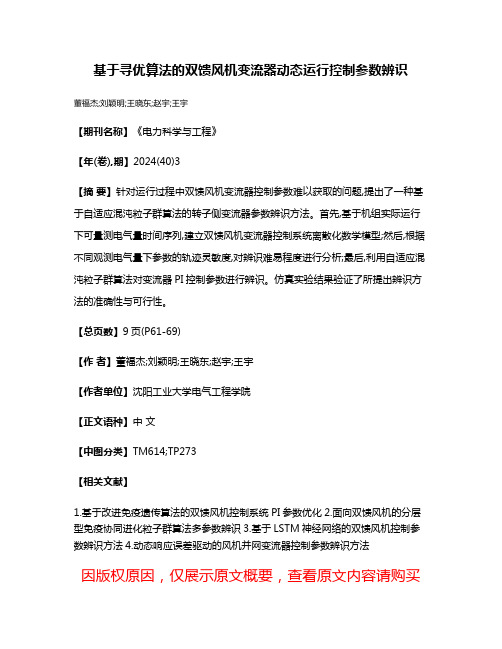
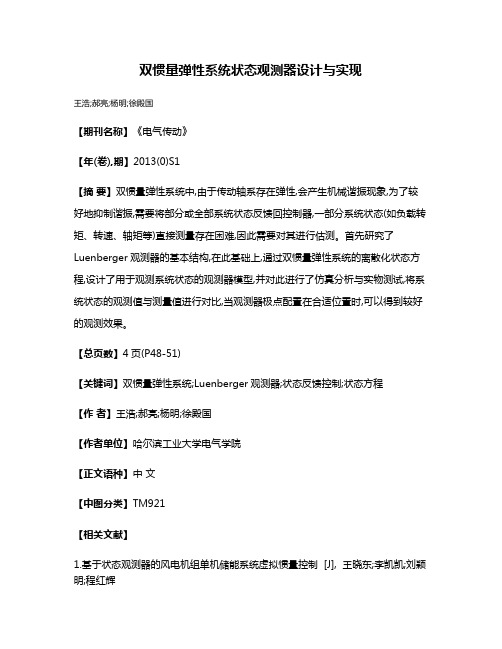
Fig. 1 Block diagram of DFIG wind turbine system
1.1 气动模型
风力机输出的机械功率:
Pm
=
1 2
ρπR2 v3CP
(1)
式中,ρ ——空气密度;R ——风轮半径;v ——风
速;CP ——风能利用系数,是关于桨距角 β 和叶尖
速比 λ 的函数。
叶尖速比 λ 定义为:
ETa
(t)来自(9)式中,X ——状态变量,X =[ωt ωg T ]ls ;u ——控制
量 , u = Te ; Y —— 输 出 变 量 , Y = ωg ;
é ê
0
0
A
=
ê ê ê
0
0
êêKls ë
-
Kls n
-Bls
æ ç
è
-
1 Jr
1
nJg
Jr + n2Jg
n2Jr Jg
ù ú ú ú ú öú ÷ú øû
风电机组传统的控制目标是在额定风速以下 时,保持风机叶片的桨距角不变,发电机转矩采用 矢量控制或直接转矩控制,调节风轮转速,由叶尖 速比控制、功率信号反馈或爬山搜索等算法实现机 组在不同风速下的最大功率追踪 。 [10] 在额定风速 以上时,保持发电机的额定转矩不变,采用增益调 度 PI 控制调节叶片桨距角,限制输入传动系统的气 动转矩稳定在与发电机转矩相匹配的值,实现功率 的稳定控制,模型如图 3 所示。
(17)
316
太阳能学报
36 卷
P(k + 1, k + 1) = P(k + 1, k) - Kf(k + 1)CaP(k + 1, k)
(18)
2.2 扭转载荷控制器设计
扭转载荷控制器的主要作用是根据已得的风
轮转速及发电机转速的估计值 ω̂ t 和 ω̂ g ,通过在原
转矩参考值上叠加一个可使等效在轴上的转速差
减小的转矩分量 Te2 ,达到降低传动链动态扭转载 荷的目的。
等效转速差为 ε :
ε = ω̂ t - ω̂ g /n
(19)
本文采用工业应用中最为常见、简单的 PI 控制
算法。原因在于:第一,PI 控制算法易于实现;第
二,PI 控制中只用到等效在轴上的转速偏差,无需
惯量 Jg 由高速轴转矩 Ths 克服发电机电磁转矩 Te 以 转速 ωg 驱动,轴上的转矩和转速通过传动比为 n 的 齿轮箱传递。
ωt
ωg
Kls
Ta Jr
Tls
Bls
n Ths Jg Te
图 2 传动系统两质量块模型 Fig. 2 Two-mass model of drive system
Jr ω̇ t = Ta - Tls
(1. 沈阳工业大学系能源工程学院,沈阳 110870;2. 沈阳工业大学风能技术研究所,沈阳 110023)
摘 要:针对恒转矩控制时传动链阻尼小、扭转载荷大会降低机组传动链上关键部件使用寿命的问题,设计基于
状态反馈的传动链动态扭转载荷控制器,使等效在轴上的发电机转速更好地跟踪风轮转速,从而减小低速轴扭矩,
(5)
Tls = Kls(θt - θ )ls + Bls(ωt - ω )ls
(6)
Jg ω̇ g = Ths - Te
n=
Tls Ths
=
ωg ωls
=
θg θls
(7) (8)
根据式(5)~式(8),系统的状态方程为:
ìẊ (t) íîY (t)
= =
AX (t) CX (t)
+
Bu
(
t)
+
增 到 系 统 的 状 态 中 ,假 设 其 导 数 为 零 。 w(t)为 过
程 噪 声 ,v(t)为 测 量 噪 声 ,均 为 零 均 值 高 斯 白 噪 声
输入,协方差矩阵分别为 Q0 和 R0 。系统状态方程
变化为:
Ẋ a(t) = Aa Xa(t) + Bau(t) + w(t) Y (t) = Ca Xa(t) + v(t)
2期
刘颖明等:基于状态反馈的双馈风电机组传动链动态扭转载荷控制
315
ωg*
+ ωg
β* PI
β
图 3 变桨控制器模型 Fig. 3 Pitch control model
2 基于状态反馈的动态扭转载荷控
制器设计
传动系统中,低速轴扭矩是传递能量的中间过程
量,其变化也直接反映传动链的扭转载荷。由式(6)
实现传动链的动态扭转载荷控制。利用 FAST 和 Matlab/Simulink 软件对机组模型和控制器进行联合仿真,结果表明
所提出的方法能有效降低双馈风电机组传动链的动态扭转载荷。
关键词:风力发电;状态反馈;传动链扭转载荷;转矩控制
中图分类号:TK81
文献标识码:A
0引言
双馈风力发电机组因其成本低、变流器容量小 等特点成为现在风电市场上使用最为广泛的机型[1], 但齿轮箱的高故障率成为制约其发展的主要原因 之一。由于机组运行的实际环境大多比较恶劣,在 受到随机风和强阵风的冲击作用时,传动链受到的 动态载荷变化十分剧烈,严重增加了各传动部件的 疲劳。传统的控制方法在高于额定风速区域时,发 电机转矩保持不变,导致机组传动链阻尼过小,易 引发振动,甚至机组结构共振[2]。因此,采取主动控 制策略减小传动链扭转载荷,对于降低各传动部件 设计、制造的要求,提高系统可靠性,延长机组寿命 具有重要意义。减小传动链扭转载荷可通过调节 桨距角或改变发电机转矩给定值来实现,根据文献 [3],改变发电机转矩给定值的方法更为有效。最 常用的方法是基于带通滤波器(BPF)的转矩波纹控 制[4]。利用带通滤波器产生的阻尼转矩与原发电机 转矩参考值相加,增加系统阻尼,进而抑制传动系 统扭振,减小载荷,该方法已在很多风力机上成功
全的控制目标,因为如果发电机转矩的变化过大,
会对转速产生影响,并导致产生功率的较大波动,
增加变桨控制的负担。所以,扭转载荷控制器的控
制输出需限定在一定范围内,再叠加在原转矩参考
值上。控制框图如图 4 所示,其中 Te1 为原转矩参 考值,Te2 为转速跟踪控制的作用量。由于风轮转 速、气动转矩、低速轴扭矩都是传动系统中不易测
(11)
式中,Xa =[ωt ωg Tls Ta] ;u = Te ;Y = ωg ;
é ê
0
ê
Aa
=
ê ê
0
êêKls
ê
0
0
Kls n
-
1 Jr
1
nJg
-
B
æ çls è
Jr + n2J n2Jg Jr
g
ö ÷ ø
1ù
Jr
ú ú
0ú ú
;
B úls
Jr
ú ú
ë0 0
0
0û
Ba = éê0 ë
-
1 Jg
λ
=
ωt R v
(2)
式中,ωt ——风轮转速。 风力机输出的气动转矩:
Ta
=
1 2
ρπR3 v2Cq
=
Pm ωt
(3)
式中,Cq ——转矩系数,与 CP 关系如式(4)所示。
Cq
=
CP λ
(4)
1.2 齿轮传动系统模型
齿轮传动系统采用两质量模型,结构如图 2 所
示。风轮的转动惯量 Jr 由气动转矩 Ta 以转速 ωt 驱 动;低速轴转矩 Tls 是由于 ωt 和低速轴转速 ωls 的不 同,而在刚度和阻尼下的作用结果;发电机的转动
应用[5,6],但其在模型存在不确定性时,系统的稳定 性和其他性能会受到影响[7]。文献[8]视传动系统 为非线性不确定系统,在建模时考虑齿轮啮合过程 中的弹性形变、啮合误差等不确定因素,基于扩张 状态观测器和非线性状态误差反馈,采用自抗扰控 制,减小传动链扭转载荷。
本文针对双馈风电机组传动链扭转载荷长期 复 杂 多 变 ,在 额 定 风 速 以 上 区 域 内 发 电 机 转 矩 恒 定,系统阻尼过低,易出现组成部件疲劳损坏的问 题。在额定风速以上区域,基于状态反馈,通过对 发电机转矩进行控制、减小等效在轴上的转速差, 从 而 降 低 传 动 系 统 动 态 扭 转 载 荷 。 最 后 ,利 用 FAST 和 Matlab/Simulink 仿 真 软 件,对 某 3 MW 机 组和所设计的控制器进行仿真,并与传统的恒转矩 控制进行比较,验证方法的有效性。
何设定变流器的参考输入才是转矩控制的重点[4]。
此外,电气系统与机械系统相比,时间常数很小,能
在短时间内响应转矩给定,在描述机械特性时,可
进行简化[9]。所以,这里将电气系统等效成一阶惯
性系统,时间常数为 τ 。
Te
=
1
1 + τs
T∗ e
式中,Te∗ ——发电机转矩给定值。
(10)
1.4 控制系统
第 36 卷 第2期
2015 年2月
文章编号:0254-0096(2015)02-0313-06
太阳能学报
ACTA ENERGIAE SOLARIS SINICA
基于状态反馈的双馈风电机组 传动链动态扭转载荷控制
Vol. 36, No. 2
Feb., 2015
刘颖明 1,马奎超 2,姚兴佳 2,朱江生 2,王晓东 1,郭庆鼎 2
可看出,低速轴两侧扭转位移的差决定扭矩值。对
传动系统扭转载荷进行控制就是控制低速轴两端
的位移差。扭转位移差是由等效在轴上的风轮转
速与发电机转速之差对时间进行积分而得到的,所