RSC-406数位式比例同步控制器产品说明书
极高精度比例同步控制器.
极⾼精度⽐例同步控制器.极⾼精度⽐例同步控制器RSC-416(超级406)使⽤操作说明书RATIO CONTROLLERV ALUE○RUN○PRG RATIO %○ERRMODE ▲▼SETCH RSC-416⾮常感谢您采⽤RSC-416极⾼精度⽐例同步控制器(以下简称416),本系统的发展是因应客户⽇益增⾼的控制特性需求⽽依据原有RSC-406原有功能进⼀步发展出来控制功能超强的后续机种。
在使⽤416之前,请先阅读本说明书,以便⽇后的配线设计、参数设定⽅式及了解异常现象发⽣的原因与处理⽅法,并请妥善保管本说明书。
☆注意事项:(1).请勿在送电中实施配线或拆装416控制器的连接器,以免发⽣危险或损坏416控制器。
(2).416控制器的端⼦6 ~ 21均为输⼊讯号与输出讯号接点,请勿接⾄AC电源以免发⽣损坏情形。
(3).416控制器的D/A输出端⼦20(+),21(-)绝对不可连接AC电源及异电压进⼊。
(4).请勿拆卸控制器外壳及做控制器零件的耐压测试。
(5).416控制器之参数,于出⼚时以作适当设定,如需特殊控制⽅式,重新设定参数后,请记录保存之。
⽬录1特点说明............32416家族介绍..........43盘⾯功能说明..........54控制器外型尺⼨及安装开孔尺⼨..65R S C-416与416A端⼦接线图...75416N与416H端⼦接线图.....86控制回路接线图.........97三组以内串联控制接线图....108四组以上串联控制接线图....119多组并联控制接线图......1210⾃动/⼿动切换控制接线图...1311差速器的运⽤.........1412接线端⼦说明.........1513参数设定⽅式.........1714参数表............2015参数内容说明.........2116试车注意事项.........2617异常故障显⽰与排除......29异常判断与故障显⽰与排除在判别RSC-416是否有问题,⾸先要了解正常状态下,此状态说明如下:⼀.AC220V电源送电后,416⾯版显⽰屏LED要亮,如⽆数字,请查明416端⼦1,2是否有220V AC电源,如果已有电源供应,则表⽰416电源供应系统出状况需更换。
KMD 04B同步控制器说明书

KMD系列电机同步控制器使用说明书目录一. 型号说明 (1)二.主要特点 (1)三.主要技术指标 (2)四.使用条件 (2)五.面板说明 (2)六.接线端子说明 (3)七.控制器原理框图及功能说明 (4)八.参数码、参数值设定说明 (8)九.参数码、参数值一览表 (8)十.多台同步控制器的联接及注意事项 (10)十一. 反馈的使用及注意事项 (12)十二. 故障检修与维护 (12)十三. 外形尺寸 (13)1KMD系列电机同步控制器是本公司在原生产的单一型号基础上推出的成系列电机调速同步控制装置,内部采用计算机为核心的全数字化设计,每台控制器能同时控制四台或八台电机的运转,且使用非常灵活、简便。
KMD系列电机同步控制器拥有强大、完善的功能,在技术上处于国内领先水平,在性能上可与国外同类产品相媲美。
广泛适用于由多台调速系统组成的各种机械设备上,如电力、钢铁、造纸、纺织、印染、电缆光纤、塑料等行业。
可对线速度、位移、张力、距离等进行控制,是电机同步控制的最佳选择。
一. 型号说明K M D 08(或04) B软件代号控制器输出路数控制器系列号二.主要特点21.数字化KMD系列控制器采用单片计算机控制,可通过对控制器进行多种参数设置,设 置参数时通过数码显示。
本控制器内有记忆体,断电后能自动保留用户设置的参数。
2.功能强大a.KMD系列控制器每台有三种给定输入方式(内部给定、外部电压给定、外部电流给定)。
b.KMD04B控制器每台可控制四个独立单元有四路输出(V01~V04),KMD08B控制器每台可控制八个独立单元有八路输出(V01~V08)。
c.每个控制单元的输出可作为另外控制单元的输入(单元串、并联使用)。
可将一台控制器作为二台或三台独立控制器使用。
d.具有缓起动、停车功能,时间可设置(0~130秒)。
e.独有的反馈越限报警功能,并能显示出反馈越限的一路,且上下限可由用户设置。
f.具有故障报警及起动信号继电器输出,其驱动能力达5A。
海濡克6390盾构机说明书
上海地铁R 406中国技术文档No. A-1642-00海瑞克公司土压平衡盾构 ø 6,390毫米目录1. 总体介绍1.1 生产设施1.2 海瑞克世界各地机构1.3 海瑞克在中国的机构和设施1.4 服务1.5 全范围服务提供商2. 概述2.1 R 406项目数据2.2 地质2.2.1 地质2.2.2 地下水2.3 管片设计2.4 轨道的延伸2.5 物流运输2.5.1 管片运输2.5.2 砂浆2.5.3 出土车2.6 一般概念2.6.1 人员安全2.6.2 隧洞安全3. 功能介绍 (土压平衡盾构)3.1 概述3.2 土料开挖 /盾构机前进3.3 多种工作模式163.3.1 全土压平衡模式163.3.2 敞开模式173.4 控制3.5 管片拼装循环4. 技术参数表185. 盾构体225.1 概述5.2 盾体部分5.3 尾盾5.3.1 尾盾润滑5.4 人孔舱(气闸)245.4.1 概述5.4.2 双室人孔舱245.4.3 设备246. 刀盘6.1 结构6.2 钢结构6.3 刀具7. 刀盘驱动7.1 概述7.2 齿轮、小齿轮7.3 主轴承7.4 密封系统7.5 主驱动润滑系统7.6 液压马达驱动输出8. 管片安装器8.1 概述8.2 悬伸臂8.3 移动机架8.4 旋转机架8.5 安装头8.6 旋转机架的能源输入8.7 混凝土管片的要求9. 后配套设备9.1 概述9.1.1 概念、结构、装置9.1.2 台车 19.1.3 台车 29.1.4 台车 39.1.5 台车 49.2 管片装卸9.3 物料运输9.3.1 概述9.3.2 螺旋输送机9.3.3 皮带输送机9.4 液压系统9.4.1 推进油缸9.4.2 电机驱动泵单元9.4.3 管片安装器9.4.4 螺旋输送机驱动9.4.5 油过滤器单元9.4.6 尾盾密封油脂泵9.4.7 冷却系统9.4.8 压缩空气装置9.4.9 空调系统10. 电气装置10.1 TBM动力电源变压器10.2 配电柜10.3 控制室控制台10.4 现场控制台10.5 控制系统10.6 电缆10.7 电缆盘10.8 控制电缆、动力电缆10.9 电机10.10 接地10.11 电压10.12 插座10.13 照明11. 辅助设备11.1 注浆设备11.2 膨润土设备11.3 数据采集系统11.4 SLS-T隧道导向系统12. 图纸13. 质量保证计划14. 参考样本1. 总体介绍海瑞克公司在1977年由海瑞克先生创办。
全数字二保焊机控制器使用说明书

RSC-406(chinese)
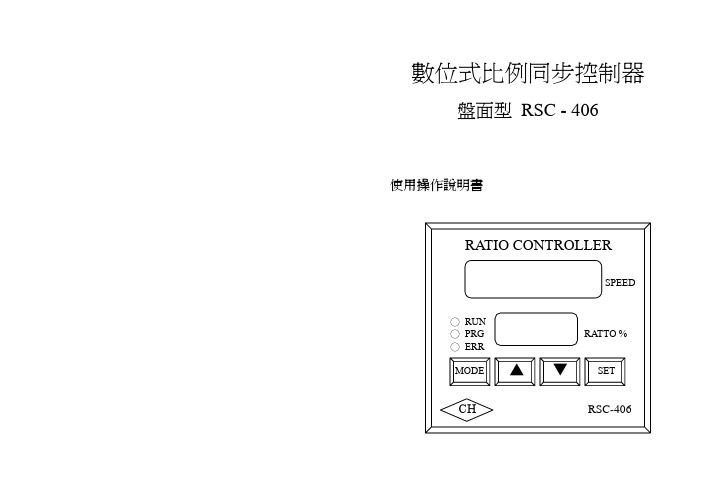
數位式比例同步控制器盤面型RSC - 406使用操作說明書RATIO CONTROLLERSPEED○RUN○PRG RATTO % ○ ERRMODE ▲▼SETCH RSC-406目錄1. 前言....................... 22. 產品特點介紹................... 33. 產品檢查..................... 33-1數位式比例同步控制器外觀................. 3 3-2控制器外觀尺寸...................... 4 3-3控制器面板顯示及操作說明.................. 4 3-3-1 LED燈號說明....................... 5 3-3-2 按鍵操作說明....................... 5 4. 安裝....................... 64-1使用環境.......................... 6 4-2控制器後端護弓、端子安裝方式及盤面安裝尺寸......... 6 5. 配線....................... 75-1 端子功能說明....................... 7 5-2 標準配線圖........................ 8 5-3 控制回路配線圖...................... 99 5-4 變位回授控制配線圖....................105-5 手動/自動切換控制配線圖..................參數說明......................6. 107. 12電子差速器的運用..................比例K值及線速K值的設定..............8. 13138-1 比例K值的設定......................138-2 線速K值的設定......................9. 控制模式設定(參數1)................14參數一覽表.....................10. 1411. 15異常故障顯示與對策.................試車注意事項....................12. 16 附錄週邊設備之選用................... 17A.譯碼器B.變位檢出器第1頁1﹒前言首先感謝您選用由本公司所開發的RSC-406數位式比例同步控器。
数字显示调节器SDC3536使用说明书(详细篇)
數字顯示調節器 使用說明書
SDC15/25/26/35/36 用用智能編程軟件包SLP-C35 資料編號 CP-UM-5290C
與智能編程軟件包同包裝。 本書是關於使用計算機進行SDC15/25/26/35/36各種設定的軟件的說明 書。請使用SDC15/25/35/36進行裝置設計、設定的人員,務必閱讀。介紹 了安裝在計算機上的方法、操作、各種功能、設定方法。
本符號顯示使用上必須“注意”的內容。
本符號顯示必須“禁止”的內容。
本符號顯示必須執行的“指示”內容。
ⅱ
警告
請勿分解本機。 否則有觸電、發生故障的危險。 本機在安裝、拆除及配線作業時,務必在切斷供給電源後進行。否則有 觸電的危險。 請勿觸摸電源端子等帶電部件。 否則有觸電的危險。
注意
請在規格書中記載的使用條件(溫度、濕度、電壓、振動、衝擊、安裝方向、 環境等)範圍內使用本機。 否則有發生火災、故障的危險。 請勿堵塞本機的通風孔。 否則有發生火災、故障的危險。 請按照本機連線的標準、指定電源及施工方法,正確配線。 否則有發生火災、故障的危險。 請勿讓斷線頭、鐵粉、水等進入機箱內。 否則有發生火災、故障的危險。 請按規格書中記載的扭矩擰緊端子螺釘,端子螺釘沒有擰緊時有觸電、發生 火災的危險。 請勿把本機中未使用的端子作爲中繼端子使用。 否則有觸電,發生火災、故障的危險。 本機是盤安裝型的場合,在輸線完畢後,推薦安裝端子蓋板。 否則有觸電的危險。(本機備有另售的端子蓋。) 請在規格書中記載的壽命範圍內使用本機的繼電器。超過使用壽命仍繼續使 用,有發生火災、故障的危險。 有發生雷電湧危險的場合,請使用本公司生産的電湧放電器。 否則有發生火災、故障的危險。 請勿錯誤配線。 錯誤配線,有導致機器發生故障的危險。 輸通電源後,約6秒鐘調節器無動作。 在調節器的繼電器輸出作爲連鎖信號使用的場合,請注意。
StyleView SV44 手推车电源系统产品说明书

StyleView ® SV44 Cartwith LCD Arm and LiFe Power SystemEnglish, Español, Français, Deutsch, Nederlands, Italiano, Svenska, 日本語, 汉语StyleView带电源手推车为医疗保健环境中的移动医护点计算机设备提供交流电源。
手推车不是用于给医疗产品或设备供电。
所提供的插座仅限于给信息技术设备,如计算机及其外围设备供电。
特点和规格安装调节电池充电/放电自动锁抽屉更换保险丝(5 安培)更换电源系统电池手推车存放(长期/短期)人体工程学维护和安全性请从下列地址获取最新版本的用户安装指南和 StyleLink 软件下载:M4x10mmFCC 合规声明根据 FCC 规则第 15 部分的规定,本手推车经测试证实符合 A 级数字装置的限制条件。
这些限制是为了提供合理保护,以防止在商业环境中操作设备时造成有害干扰。
本设备产生、使用并可能辐射射频能量,如果未按说明手册进行安装和使用,可能会对无线电通信造成有害干扰。
在住宅区使用本设备可能会造成有害干扰,这种情况下,用户应自费解决干扰问题。
未经 Ergotron, Inc.明确许可的变更或改变可能让用户丧失操作本设备的权限。
请与 Ergotron 联系获得完整的 EMC 兼容性资料。
重要说明!本产品安装完成后需要调节张力。
在尝试调节动作范围或张力之前,确保所有设备都正确安装在产品上。
任何时候在本产品上添加或改变设备导致装置总重量改变时,您应该按照调整步骤重新调整,以确保操作安全,并处于最佳状态。
产品应当能在整个动作范围内灵活自如。
如果本产品很难移动,或者不能固定在您设定的地方,请按照调整说明松开或拧紧张力,使产品在整个动作范围内灵活自如。
根据您所用产品及调节方式,可能需要旋转几圈后才能注意到差别。
需要的工具抽屉或工作面打开时切勿推车。
RSC使用手册

RSC 电子期刊检索栏位
-8-
RSC 使用手册
此为 RSC 电子期刊检索画面,使用者可以选择单本或多本期刊同时进行检索(要选 择多本期刊请按住 Ctrl 不放,并利用鼠标器点选期刊名称即可),之后再照着上面的栏 位,依序填入查询条件,如年代、页数、卷期、篇名、作者、摘要或全文关键字…等 等。
Online 1364-5528 1471-7107 1460-4760 1460-4779 1460-4787 1474-9181
1364-548
1460-47444444 1744-15799999
1466-8033 1477-9234
1364-5498 1463-9270
1364-5544 1464-0333 1364-5501 1473-0189
RSC 网站的右方中间,列举出一些较常为使用者利用的资源,因此使用者 可以在此区域找到有关 RSC 出版图书、组织简介、教育训练等等相关资源。
-7-
RSC 使用手册
(三)、查询功能
此章节主要针对 RSC 电子期刊之查询功能作一个深入的说明,期望能够通过 这样的方式,让使用者能够轻易地掌握查询之技巧与功能,进而快速且精确的找 到最适切的信息。
在下一个章节,将针对 RSC 网站功能,由浅入深,并以图解的方式,让使用 者可以通过本手册按图所冀,快速熟悉并充份利用 RSC 所提供之化学专业资源。
-4-
RSC 使用手册
(二)、一般功能
RSC 于 2005 年 5 月完成主机转移与启用新版网站,因此在使用介面与功能 上,都有别于以往的改变,包括 RSC 对化学资源的整合、产品的查询以及资料的 呈现等等。在「一般功能」单元中,主要针对 RSC 新介面的介绍及说明,希望能 够帮助使用者快速掌握 RSC 的网站功能与资源。
BKSC-47P5GA伺服控制器说明书 第一章 序言

! 危险
上电前必须将盖板盖好,否则有触电和爆炸的危险。 不要把输入端子与输出端子混淆,否则有爆炸和损坏财物的危险。 存贮时间超过2年以上的控制器,上电时应先用调压器逐渐升压,否则有 触电和爆炸的危险。 通电情况下,不要用手触摸控制器的端子,否则有触电的危险。 不要用潮湿的手操作控制器,否则有触电的危险。
控制器在驱动活塞式往复性负载时,请注意输出电流会有不稳定现象,长期低频运行是 情况更突出。 7、负载装置的机械共振点
控制器在一定的输出频率范围内,可能会遇到负载装置的机械共振点,必须通过设置跳 跃频率来避开。
1.6.2 关于控制器
1、改善功率因素的电容或压敏器件 由于控制器输出是脉冲波,输出侧如安装有功率因数的电容或防雷用压敏电阻等,都会
在使用北科伺服控制器之前,请您仔细阅读该手册,以保证正确使用。错误使用可能造 成控制器运行不正常、发生故障或降低使用寿命,乃至发生人身伤害事故。因此使用前应反 复阅读本说明书,严格按说明使用。本手册为随机发送的附件,务必请您使用后妥善保管, 以备今后对控制器进行检修和维护时使用。
1.1 开箱检查注意事项
在开箱时,请认真确认:在运输中是否有破损现象;控制器铭牌的型号、规格是否与您 的订货要求一致。如发现有遗漏或不相符的情况,请速与供应商联系解决。
1.2 控制器的铭牌
在控制器箱体的右下方,贴有标示控制器型号及额定值的铭牌,铭牌内容如图 1-1 所示
1
BKSer定输出电压、电流和频率 额定输出容量、电流,频率范围 及电压
图 1-1 控制器的铭牌
1.3 控制器型号说明
产品类型: 北科伺服控制器
BKSC-47P5GA
代号:电压等级
2
220V
4
380V
ABB机器人操作培训(S4C_IRB)_说明书_完整版

S4C IRB基本操作培训教材1、培训教材介绍2、机器人系统安全及环境保护3、机器人综述4、机器人启动5、用窗口进行工作6、手动操作机器人7、机器人自动生产8编程与测试9、输入与输出10、系统备份与冷启动11、机器人保养检查表附录1、机器人安全控制链附录2、定义工具中心点附录3、文件管理1、培训教材介绍本教材解释ABB机器人的基本操作、运行。
你为了理解其内容不需要任何先前的机器人经验。
本教材被分为十一章,各章分别描述一个特别的工作任务和实现的方法。
各章互相间有一定联系。
因此应该按他们在书中的顺序阅读。
借助此教材学习操作操作机器人是我们的目的,但是仅仅阅读此教材也应该能帮助你理解机器人的基本的操作。
此教材依照标准的安装而写,具体根据系统的配置会有差异。
机器人的控制柜有两种型号。
一种小,一种大。
本教材选用小型号的控制柜表示。
大的控制柜的柜橱有和大的一个同样的操作面板,但是位于另一个位置。
请注意这教材仅仅描述实现通常的工作作业的某一种方法,如果你是经验丰富的用户,可以有其他的方法。
其他的方法和更详细的信息看下列手册。
《使用指南》提供全部自动操纵功能的描述并详细描述程序设计语言此手册是操作员和程序编制员的参照手册。
《产品手册》提供安装、机器人故障定位等方面的信息。
如果你仅希望能运行程序,手动操作机器人、由软盘调入程序等,不必要读8-11章。
2、机器人系统安全及环境保护机器人系统复杂而且危险性大,在训练期间里,或者任何别的操作过程都必须注意安全。
无论任何时间进入机器人周围的保护的空间都可能导致严重的伤害。
只有经过培训认证的人员才可以进入该区域。
请严格注意。
以下的安全守则必须遵守。
-万一发生火灾,请使用二氧化碳灭火器。
-急停开关(E-Stop )不允许被短接。
-机器人处于自动模式时,不允许进入其运动所及的区域。
-在任何情况下,不要使用原始盘,用复制盘。
-搬运时,机器停止,机器人不应置物,应空机。
-意外或不正常情况下,均可使用E-Stop键,停止运行。
NMB24-SR 比例控制器商品说明书
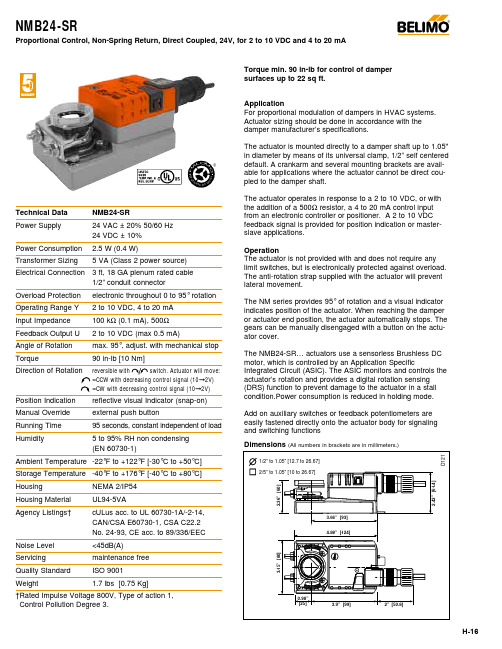
H-16Technical Data NMB24-SRPower Supply 24 VAC ±20% 50/60 Hz 24 VDC ±10%Power Consumption 2.5 W (0.4 W)Transformer Sizing5 VA (Class 2 power source)Electrical Connection 3 ft, 18 GA plenum rated cable1/2” conduit connector Overload Protection electronic throughout 0 to 95°rotation Operating Range Y 2 to 10 VDC, 4 to 20 mA Input Impedance 100 k Ω(0.1 mA), 500ΩFeedback Output U 2 to 10 VDC (max 0.5 mA)Angle of Rotation max. 95°, adjust. with mechanical stop Torque90 in-lb [10 Nm]Direction of Rotation=CCW with decreasing control signal (10©2V)=CW with decreasing control signal (10©2V)Position Indication reflective visual Indicator (snap-on)Manual Override external push buttonRunning Time 95 seconds, constant independent of load Humidity5 to 95% RH non condensing (EN 60730-1)Ambient Temperature -22°F to +122°F [-30°C to +50°C]Storage Temperature -40°F to +176°F [-40°C to +80°C]Housing NEMA 2/IP54Housing Material UL94-5VAAgency Listings †cULus acc. to UL 60730-1A/-2-14,CAN/CSA E60730-1, CSA C22.2 No. 24-93, CE acc. to 89/336/EEC Noise Level <45dB(A)Servicing maintenance free Quality Standard ISO 9001Weight1.7 lbs [0.75 Kg]†Rated Impulse Voltage 800V, Type of action 1,Control Pollution Degree 3.Torque min. 90 in-lb for control of damper surfaces up to 22 sq ft.ApplicationFor proportional modulation of dampers in HVAC systems.Actuator sizing should be done in accordance with the damper manufacturer ’s specifications.The actuator is mounted directly to a damper shaft up to 1.05"in diameter by means of its universal clamp, 1/2” self centered default. A crankarm and several mounting brackets are avail-able for applications where the actuator cannot be direct cou-pled to the damper shaft.The actuator operates in response to a 2 to 10 VDC, or with the addition of a 500Ωresistor, a 4 to 20 mA control input from an electronic controller or positioner. A 2 to 10 VDC feedback signal is provided for position indication or master-slave applications.OperationThe actuator is not provided with and does not require any limit switches, but is electronically protected against overload.The anti-rotation strap supplied with the actuator will prevent lateral movement.The NM series provides 95°of rotation and a visual indicator indicates position of the actuator. When reaching the damper or actuator end position, the actuator automatically stops. The gears can be manually disengaged with a button on the actu-ator cover.The NMB24-SR … actuators use a sensorless Brushless DC motor, which is controlled by an Application SpecificIntegrated Circuit (ASIC). The ASIC monitors and controls the actuator ’s rotation and provides a digital rotation sensing (DRS) function to prevent damage to the actuator in a stall condition.Power consumption is reduced in holding mode.Add on auxiliary switches or feedback potentiometers are easily fastened directly onto the actuator body for signaling and switching functions Dimensions(All numbers in brackets are in millimeters.)©HAL O M OB r ush le s s D C Mo to r。
Model 4062 Pump-Up 控制器说明书
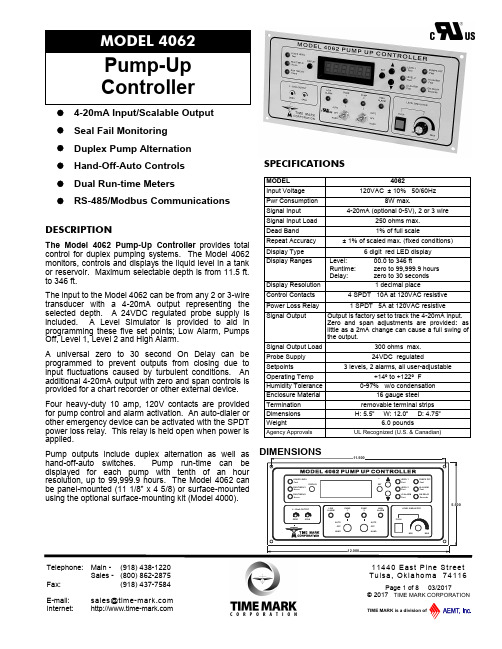
DESCRIPTIONThe Model 4062 Pump -Up Controller provides total control for duplex pumping systems. The Model 4062 monitors, controls and displays the liquid level in a tank or reservoir. Maximum selectable depth is from 11.5 ft. to 346 ft.The input to the Model 4062 can be from any 2 or 3-wire transducer with a 4-20mA output representing the selected depth. A 24VDC regulated probe supply is included. A Level Simulator is provided to aid in programming these five set points; Low Alarm, Pumps Off, Level 1, Level 2 and High Alarm.A universal zero to 30 second On Delay can be programmed to prevent outputs from closing due to input fluctuations caused by turbulent conditions. An additional 4-20mA output with zero and span controls is provided for a chart recorder or other external device.Four heavy -duty 10 amp, 120V contacts are provided for pump control and alarm activation. An auto -dialer or other emergency device can be activated with the SPDT power loss relay. This relay is held open when power is applied.Pump outputs include duplex alternation as well as hand -off -auto switches. Pump run -time can be displayed for each pump with tenth of an hour resolution, up to 99,999.9 hours. The Model 4062 can be panel -mounted (11 1/8” x 4 5/8) or surface -mounted using the optional surface -mounting kit (Model 4000).● 4-20mA Input/Scalable Output ● Seal Fail Monitoring ● Duplex Pump Alternation ● Hand -Off -Auto Controls ● Dual Run -time Meters● RS -485/Modbus Communications Telephone: Main - (918) 438-1220 Sales- (800) 862-2875 Fax: (918) 437-7584 11440 East Pine Stree t Tulsa, Oklahoma 74116SPECIFICATIONSMODEL4062Input Voltage 120VAC ± 10% 50/60HzPwr Consumption 8W max.Signal Input 4-20mA (optional 0-5V), 2 or 3 wireSignal Input Load 250 ohms max. Dead Band 1% of full scaleRepeat Accuracy ± 1% of scaled max. (fixed conditions)Display Type 6 digit red LED display Display RangesLevel: 00.0 to 346 ftRuntime: zero to 99,999.9 hours Delay:zero to 30 seconds Display Resolution 1 decimal placeControl Contacts 4 SPDT 10A at 120VAC resistive Power Loss Relay 1 SPDT 5A at 120VAC resistiveSignal OutputOutput is factory set to track the 4-20mA input. Zero and span adjustments are provided : as little as a 2mA change can cause a full swing of the output.Signal Output Load 300 ohms max. Probe Supply 24VDC regulated Setpoints3 levels, 2 alarms, all user -adjustableOperating Temp +14º to +122º FHumidity Tolerance 0-97% w/o condensationEnclosure Material 16 gauge steelTermination removable terminal strips Dimensions H: 5.5” W: 12.0” D: 4.75”Weight6.0 poundsAgency ApprovalsUL Recognized (U.S. & Canadian)A 6 digit LED displayM Indicates display is showing HIGH ALARM setting B Indicates display is showing LIQUID LEVEL N Indicates display is showing ON DELAY setting C Indicates display is showing PUMP #1 runtime O Controls ZERO setting for 4 to 20mA output D Indicates display is showing PUMP #2 runtimePControls SPAN setting for 4 to 20mA output E Switches display between B, C and D Q Indicates LOW ALARM ACTIVE (low alarm relay -closed) F Push to enter SET mode R Indicates PUMP #1 RUNNING (pump #1 relay -closed) G Push ☐ to INCREASE setting S Indicates PUMP #2 RUNNING (pump #2 relay -closed) H Push ❑ to DECREASE settingT Indicates HIGH ALARM ACTIVE (high alarm relay -closed) I Indicates display is showing LEVEL 1 setting U 3-position switch HAND -OFF-AUTO Pump #1 J Indicates display is showing LEVEL 2 setting V 3-position switch HAND -OFF -AUTO Pump #2 KIndicates display is showing LOW ALARM settingWMomentary pushbuttonengages LEVEL SIMULATORL Indicates display is showing PUMPS OFF settingX Controls SIMULATED LEVEL(when SIMULATOR button is engaged)KEEP THIS DATA SHEET FOR FUTURE REFERENCE.GENERAL SAFETYPOTENTIALLY HAZARDOUS VOLTAGES ARE PRESENT AT THE TERMINALS OF THE MODEL 4062. ALL ELECTRICAL POWER SHOULD BE REMOVED WHEN CONNECTING OR DISCONNECTING WIRING.DO NOT EXCEED THE OUTPUT OR INPUT RATINGS, AS STATED IN THE SPECIFICATIONS.PROTECT THE UNIT WITH PROPERLY RATED FUSES.DO NOT INSTALL IN DAMP OR MOIST AREAS.THIS DEVICE SHOULD BE INSTALLED AND SERVICED BY QUALIFIED PERSONNEL.Installation InstructionsTelephone: Main - (918) 438-1220 Sales - (800) 862-2875 Fax: (918) 437-7584 11440 East Pine Stree t Tulsa, Oklahoma 74116figure 1. Front Panel Controlsfigure 2. Back Panel Controls4-20m A I N + -4-20m A O U T+ -+24V D C O U T + -GNDTelephone: Main - (918) 438-1220 Sales - (800) 862-2875 Fax: (918) 437-7584 11440 East Pine Stree t Tulsa, Oklahoma 74116Telephone:Main -(918) 438-1220Sales -(800) 862-2875 Fax:(918) 437-758411440 East Pine Stree t Tulsa, Oklahoma 74116Telephone:Main -(918) 438-1220Sales -(800) 862-2875 Fax:(918) 437-758411440 East Pine Stree t Tulsa, Oklahoma 74116TYPICAL APPLICATION - Float SwitchesTelephone:Main -(918) 438-1220Sales -(800) 862-2875 Fax:(918) 437-758411440 East Pine Stree t Tulsa, Oklahoma 74116● 20 Ga. CRS Enclosure ● Removable Access PanelDesigned to easily install Time Mark Models 403, 404, 4042, 4052, 4062, or 408 Liquid Level Controllers.This 20 gauge steel enclosure features a removable top panel for easy access to wiring connections. The mounting kit comes complete with everything you need, including steel support brackets. This model is designed specifically for applications that require surface -mounting these Time Mark Liquid Level Controllers.For more information, see the full data sheet in the Time Mark standard products catalog.Telephone: Main - (918) 438-1220 Sales - (800) 862-2875 Fax: (918) 437-758411440 East Pine Stree t Tulsa, Oklahoma 74116ACCESSORY OPTIONS:Telephone:Main -(918) 438-1220Sales -(800) 862-2875 Fax:(918) 437-758411440 East Pine Stree t Tulsa, Oklahoma 74116。
MTS SNC240_440 2 4轴控制器产品说明书
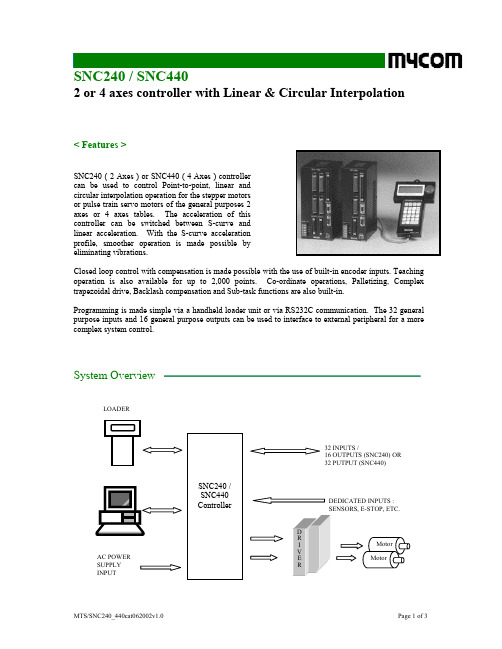
SNC240 / SNC4402 or 4 axes controller with Linear & Circular Interpolation< Features >SNC240 ( 2 Axes ) or SNC440 ( 4 Axes ) controller can be used to control Point-to-point, linear and circular interpolation operation for the stepper motors or pulse train servo motors of the general purposes 2 axes or 4 axes tables. The acceleration of this controller can be switched between S-curve and linear acceleration. With the S-curve acceleration profile, smoother operation is made possible by eliminating vibrations.Closed loop control with compensation is made possible with the use of built-in encoder inputs. Teaching operation is also available for up to 2,000 points. Co-ordinate operations, Palletizing, Complextrapezoidal drive, Backlash compensation and Sub-task functions are also built-in.Programming is made simple via a handheld loader unit or via RS232C communication. The 32 generalpurpose inputs and 16 general purpose outputs can be used to interface to external peripheral for a more complex system control.System Overview32 INPUTS /16 OUTPUTS (SNC240) OR 32 PUTPUT (SNC440)DEDICATED INPUTS :SENSORS, E-STOP, ETC.AC POWER SUPPLY INPUTLOADERITEMS DESCRIPTIONS Control system Microprocessor control systemNumber of axes SNC240 : 2 axes, SNC440 : 4 axes(PTP, linear or circular interpolation controlled )Motors used with Stepping motor or pulse train input servo motorProgram capacity Program : 2,000 lines ( Main program : 16, sub-program: 84 )Position data : 2,000 positionsStorage means Flash Memory ( rewritable 100,000 times )Programming language Enhanced G-codeControl functions Manual mode: Origin search, virtual origin set/return, coordinate specifyfeed, scan feed, index feed, step feed, I/O operation, sensor /driver signal operation, condition setting, position data storagePlay mode : Program running ( automatic execution, 1-line execution,external activation, online execution ), moving positional dataProgram mode: Generation, editing, and deleting programs and positional data,teaching, uploading and downloadingParameter : Motor types, sensor logic, encoder set up, etc.Program functions Set up conditionsreturn to originsetting up the quantity of indexmoving instructiongeneral purpose I/Orepeatssubroutinesend of programvirtual origin setting timertemporary stop of programcoordinate system switchingpalletizing operationcomplex trapezoidal driveunconditional jumpdriver control operationregister mathematical operation register conditional jumpAcceleration system S-curve drive ( 8 types ), linear drivePulse scaling factor The amount of movement per pulse : 1~9,999,999Command system Loader input / Host computer / external activation signalMovement range The range of setting 1 moving instruction : 0~±9,999,999Frequency range Low speed : 1~65.535 Kpps in 1pps intervalStandard : 12.5~819.187 Kpps in 12.5pps intervalHigh Speed : 50~3,276.75 Kpps in 50pps intervalAcceleration Low speed : 10~ 1,000 pps/msec for 100% setting ( 0.1% interval )Standard : 125~125,000 pps/msec for 100% setting ( 0.1% interval )High speed : 500~500,000 pps/msec for 100% setting ( 0.1% interval ) Driver Interface Clock output: 2-clock or 1-clock system ( open collector or Line driver )Motor OFF output: CO for stepper or SERVO ON for servoAlarm input: selectable logicIn-position input: for servoDeviation counter reset output: for servo motor 1-shot pulse: 0.1 secEncoder input: A/B/Z phases ( Multiple of 1/2/4 is possible )Machine sensor I/F Both end over-run, near origin, and origin sensor (selectable sensor logic ) General Purpose I/O 32 Input : Photo-coupler isolated 5mA internal power supply (+24V)16 Output : Photo-coupler isolated, open collector 0.5A voltage resistance: 35V Dedicated I/O 6 Inputs : Photo-coupler isolated 5mA internal power supply (+24V)Program activation input, emergency stop input, deceleration/stopinput, RESET input, manual operation input, origin return input4 Output : Photo-coupler isolated, open collector 0.5A voltage resistance:35V,ready output, output while moving, error output, origin positionProgram selection input 4 Inputs : Photo-coupler isolated 5mA internal power supply is used.16 programs can be triggered ( program #0~15 ) Externalcommunication I/FRS232-C : 1 channel parameter can be set upSetup DIP switch Parameter operation : permitted / prohibited Parameter functionsSet up the amount of movement for 1 pulse Software limit are set upConditions for automatic operation are set up Conditions for origin return is set upPosition of decimal point for coordinate display Origin return axis sequence is set up Closed control is valid or invalidMultiplication ratio and direction of encoder input are set Motor types and sensors are setS-curve slope (including pattern) / linear slope RS232C parameter is set Highest speed is setAuto return to origin before activating program can be setContents of execution to be displayed or not displayed during execution Backlash compensation can be valid or invalid Memory clearInput power supply Single Phase AC 85V ~ 264V ( 100W maximum power consumption ) Noise resistance 1500V/1usec or more ( Single controller )Momentary stoppage 20msec minimum ( when the loader input is stopping for emergency )Ambient environment During operation : Temp 0~50°C ( Humidity : 30~80%,No dew condensation ) During storage : Temp 0~60°C ( Humidity : 20~90% ) External dimension ( excluding mounting bracket ) SNC440 : 100 (W) x 225 (H) x 122 (D) mm SNC220 : 80 (W) x 225 (H) x 122 (D) mmLoader SNC440PL : 125 (W) x 194 (H) x 25 (D) mm WeightSNC440 : 2.0 Kg SNC240 : 1.5 Kg Loader : 0.5 KgOrdering Information :- Series nameEncoder input :“440” - 4 axes “L” - Line driver “240” - 2 axes “P” - Opto-coupler“PL” – Loader unit。
火灾报警控制器(联动型)技术说明书yks4064a说明书
第一章概述 (2)1.1主要功能及特点 (2)1.2技术指标 (2)第二章控制器结构及配置 (3)2.1控制器面板说明 (4)2.2多线制联动控制盘面板说明 (5)2.3内部接线说明 (5)2.4外部接线说明 (8)第三章控制器安装与调试 (10)3.1开箱检查 (10)3.2安装条件及方式 (10)3.3开机检查 (10)3.4外部设备检查 (10)3.5接线和设置 (10)3.6调试 (10)第四章一般用户使用说明 (12)4.1火警信息及处理 (12)4.2故障信息及处理 (13)4.3联动信息及处理 (13)4.4信息的查询 (13)4.5报警声响说明 (13)4.6基本功能 (14)4.7控制功能 (17)4.8复位功能 (18)第五章调试用户使用说明 (19)5.1调试功能 (19)5.2测试功能 (24)第六章故障处理和维护 (25)6.1一股性故障处理 (26)6.2打印机维护 (26)6.3液晶维护 (27)第七章注意事项 (28)附录1名词解释 (29)附录2设备类型表 (30)附录3汉字-区位码对照简表 (31)附录3汉字-区位他又1 照简表(续1) (32)附录3汉字-区位码又1 照简表(续2) (33)附录4汉字拼音-区位码对照表(一级字库) (34)附录5调试表格 (35)第一章概述本控制器是我公司充分调研消防市场需要,吸收国内外消防系统的先进理念,依照国标GB 4717-2005、GB 16806-2006的要求和精神,设计的新一代报警联动一体化控制器。
采用模块化设计思想,具有功能强、容量大、配置灵活的特点。
采用大屏幕液晶和微型打印机,可显示和打印系统所有报警、故障及操作的汉字信息。
具有灵活、简洁的现场编程功能,适应不同工程的要求。
可与我公司的其它产品配套使用,组成完备的报警联动一体化控制系统。
特别适合消防工程的应用。
1.1主要功能及特点1.1.1火灾报警、联动控制、区域显示功能报警、联动回路两总线无极性,可连接32 块回路板,每块回路板 2 个回路,每个回路254 点,总计可达到16256点。
4064用户使用说明书

7.面板说明
7.1指示灯说明
主电指示:当交流电源电压>187V时本灯亮。
备电指示:当蓄电池电压>22.5V时本灯亮。
电源故障:当交流电压≤187V或蓄电池电压≤22.5V时本灯亮。
消声指示;当报警器发出声响信号时,按动“消声”键本灯亮。
运行指示;当报警器工作正常,本灯闪亮。
10.2编程软件
在编程软件中用户可输入每只探测器报警时在区域显示器上的显示点及联动的控制模块组、探测器的相与关系、控制模块的延时启动、控制模块多只启动及反馈联动功能、探测器组的相与关系及联动控制模块组,并可为每个设备输入备注信息(如设备名、房间名等)。
10.1.21“编程/输入”: 给相应的设备图形输入地址。分为网络方式和单机方式。网络方式下:CAN总线设备需输入主机号,485总线设备需输入主机号、设备号,探测器和控制模块需输入主机号、设备号、通道号、地址号。单机方式下:CAN总线设备(只有一个4064)和485总线设备需输入设备号,探测器和控制模块需输入设备号、通道号和地址号。输入顺序必须是先输入CAN总线设备地址,再输入485总线设备地址,最后输入探测器和控制模块地址。操作:将鼠标移到设备图形上按左键,然后按提示输入数据。此项功能中还允许用户根据需要选择手动输入方式或自动输入方式。
4.系统功能及特性
①本系统可实现自动报警、自动控制功能。
②本系统可通过继电器输出火警信号。
③本系统可显示现场平面图形。
④本系统可连接各种编码器件、区域显示器及具备CAN接口的报警器。
⑤本系统可实现各种编码器件之间的逻辑控制关系。
⑥本系统采用一体化工业计算机来实现监视管理。
⑦本系统可以采用触摸屏及鼠标器操作,使用非常方便。
科孚纳科技有限公司产品手册说明书
感谢:欢迎选择科孚纳科技有限公司的产品,在本产品使用前请详细阅读本手册,以便于正确使用。
请注意以下事项•本手册的版权归科孚纳科技有限公司所有。
在未经本公司书面许可的情况下,严禁以任何形式复制、传递、分发和存储本手册的任何内容。
•科孚纳科技有限公司遵循持续发展的策略。
因此,青智仪器有限公司保留在不预先通知的情况下,对本手册中描述的任何产品进行修改和改进的权力。
•本手册的内容可能因为修改和改进而产生未经预告的变更。
如有不详之处,请参照本手册提供的信息联系。
•科孚纳科技有限公司严格实施ISO9001 质量管理体系。
本公司产品虽然在严格的品质管理过程控制下制造、出厂,但如果出现不正常事项或意外之处,请通知本公司代理商、或参照本手册提供的信息联系。
•在产品使用过程中出现任何不正常事项或意外之处,请参照本手册提供的信息联系。
•“”为科孚纳科技有限公司注册商标。
安全须知:请先阅读使用测试仪及其附件之前,请先完整阅读用户使用说明书。
否则,测试仪及其附件提供的保护可能会失效。
仪表使用注意事项•在使用通信之前,请认真阅读仪表使用说明书,熟悉设备,连接好设备后,如果仪表带有通讯接口,请事先用仪表随机光盘中所带的通讯测试软件进行通讯测试(请注意通讯测试软件的规约版本,版本不一致,会造成部分数据通讯不成功),在通讯测试成功之后再使用本规约。
•含有本规约的仪表可以直接与带有Modbus_rtu通讯规约的PLC直接通讯,也可以直接与组态软件通信。
•本规约中数据用十进制或十六进制表示,数据后面带“H”的为十六进制数据,不带“H”为十进制数据目录概述第1章串口与USB通信1.1 串口连接............................................................................1.2 USB连接.............................................................................第2章以太网通信(选件)2.1 以太网通信..........................................................................2.2 以太网连接..........................................................................2.3 以太网设置..........................................................................第3章Modbus 规约3.1 Modbus 规约说明.....................................................................3.2 仪表数据寄存器地址.................................................................. 附录CRC校验码的计算...............................................................概述833H仪表能够通过通信口与PC或其他设备(例如PLC)通信,将测量数据传送的PC或主机设备,并且在PC或主机设备上可以更改833H仪表的设置。
威姆科KU8801 型 十二程序段数字式闪光对焊同步控制器使用说明书
KU8801型十二程序段数字式闪光对焊同步控制器使用说明书北京威姆科焊接器材有限公司一、概述KU8801微机闪光对焊同步控制器,是一种由单片机作为主控制单元的对焊同步控制器。
该控制器能对对焊机的夹持、快速送进、闪光、焊接、顶锻、间歇、回火、保持、卸载、返回、储能罐充液这十一个程序段的工作时间(周波数/脉冲数)及工作电流进行调节和同步控制,实现电网电压的补偿。
并对各个程序段的工作参数实现数字式调节和显示。
该控制器能对短路时间进行调整和控制,在闪光阶段,如果工件短路时间超过给定值,控制器将自动切断焊接电源。
由于采用了单片机作为主控单元,并采用全数字调节和显示,本控制器的体积和重量与传统电路组成的控制器相比,不仅体积和重量大为减少,更重要的是大大提高了产品的可靠性和稳定性,使产品的性能/价格比大幅度提高。
其仪表化的外壳也便于将其嵌入焊机控制柜内部,缩小了整机体积,降低了制造成本。
由于采用了低功耗的单片机芯片WE8801,使得本控制器整机功耗只有20W。
实属节能产品。
本控制器的高度集成化,尤其是I2C总线和数字显示技术的应用,使得电路十分简洁,便于产品的调整、维护和保养。
图一、控制器外观1二、技术指标:1、程序段数量: 122、各程序段时间: 0~9.9s3、工作电流相对值调节范围: 0~99.5 (小数值0.5用小数点表示)4、控制输出量: 1路主晶闸管移相触发信号和夹持、送进、顶锻、返回、储能罐充液等7个开关信号。
5、输入量:6路开关量和1路模拟量。
6 、最大控制电流: 1000A (通过外接主可控硅)7 、电源电压: AC 10V 双路 50Hz8 、功耗:≤20W9 、体积和重量: 160×80×125mm(宽×高×深) 1.5kg (含变压器)10、成套供应: KU8801控制器一台,30W电源变压器一只三、接线方法:结合图二,对KU8801的外部接线说明如下:1、控制器接线端子的1~8号端子是开关量输出端口,其中8号是公用端口。
工业缝纫机伺服控制器用户手册

工业缝纫机伺服控制器用户手册前言注意: 使用前请详细阅读本用户手册及所搭配的缝制设备说明书,配合正确使用,并须由接受过专业培训的人员来安装或操作。
本产品仅适用于指定范围的缝制设备,请勿移做其他用途。
本公司拥有对此用户手册的最终解释权。
使用中若存有任何疑问或对我们的产品及服务有任何意见或建议,请随时与我们联系。
安全说明1)安装和调试前,请仔细认真地阅读本手册。
2)本手册中标有符号之处为安全注意点,必须特别注意并严格遵守,以免造成不必要的损害。
3)本产品须由受过专业培训的人员来安装或操作。
4)确保电源安全接地并符合产品铭牌上标示的电压范围及技术要求。
第 1 页共 8 页第 2 页 共 8 页5) 接通电源开关时,请把脚离开脚踏板。
6)在进行以下操作时,必须先断开系统电源:■ 安装机器时;■ 在控制箱上插拔任何连接插头时; ■ 穿针线,换机针及翻抬机头时; ■ 机器休息不用及修理或调整时。
7) 拧紧所有紧固件,以防止缝制作业时产生振动或停针位置错位等异 常现象。
8) 每次关闭控制系统后再次启动,应相隔30秒以上。
9) 设置系统控制参数或进行保养修理工作应由受过相关培训的专业人 员来完成。
10) 维修所用的所有零部件,必须由本公司提供或认可,方能使用。
11) 接地线的安装(特别注意)。
注意:安装控制器时必须正确接地,否则将导致控制器无法正常工作,更严重的可能会被电击(详见安装章节)。
1. 产品介绍 1.1 概述此系列工业缝纫机数控交流伺服系统,电机与控制器分体吊装,使配置组合灵活方便,电机与控制器可按需搭配,实现多种缝纫机对功率、速度等的配套要求;安装简易、调整便捷、力矩大、体积小、噪音低、效率高(省电!);采用开关电源供电,使其具有更宽的电压适配范围;电磁铁侧面接插,使连接更可靠,避免油渍污染引起的控制器故障;优化交流伺服电机控制策略,使转速控制精度高,停针速度快;专利设计的吊装方式使安装更简捷,整体震动降至最低,系统运行更平稳;具有电磁铁回路短路保护功能,防止错误接线损坏控制器。
极高精度比例同步控制器.

极高精度比例同步控制器RSC-416(超级406)使用操作说明书RATIO CONTROLLERV ALUE○RUN○PRG RATIO %○ERRMODE ▲▼SETCH RSC-416非常感谢您采用RSC-416极高精度比例同步控制器(以下简称416),本系统的发展是因应客户日益增高的控制特性需求而依据原有RSC-406原有功能进一步发展出来控制功能超强的后续机种。
在使用416之前,请先阅读本说明书,以便日后的配线设计、参数设定方式及了解异常现象发生的原因与处理方法,并请妥善保管本说明书。
☆注意事项:(1).请勿在送电中实施配线或拆装416控制器的连接器,以免发生危险或损坏416控制器。
(2).416控制器的端子6 ~ 21均为输入讯号与输出讯号接点,请勿接至AC电源以免发生损坏情形。
(3).416控制器的D/A输出端子20(+),21(-)绝对不可连接AC电源及异电压进入。
(4).请勿拆卸控制器外壳及做控制器零件的耐压测试。
(5).416控制器之参数,于出厂时以作适当设定,如需特殊控制方式,重新设定参数后,请记录保存之。
目录1特点说明............32416家族介绍..........43盘面功能说明..........54控制器外型尺寸及安装开孔尺寸..65R S C-416与416A端子接线图...75416N与416H端子接线图.....86控制回路接线图.........97三组以内串联控制接线图....108四组以上串联控制接线图....119多组并联控制接线图......1210自动/手动切换控制接线图...1311差速器的运用.........1412接线端子说明.........1513参数设定方式.........1714参数表............2015参数内容说明.........2116试车注意事项.........2617异常故障显示与排除......29异常判断与故障显示与排除在判别RSC-416是否有问题,首先要了解正常状态下,此状态说明如下:一.AC220V电源送电后,416面版显示屏LED要亮,如无数字,请查明416端子1,2是否有220V AC电源,如果已有电源供应,则表示416电源供应系统出状况需更换。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
盤面型RSC-406使用說明書浙江麗水謙勝機電有限公司浙江麗水水閣工業區綠穀大道306-2號TEL: FAX:068目錄1.前言~1~1.前言... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... .... ... ... . (2)2.產品特點介紹... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... .... ... .... (3)3.產品檢查… … … … … … … … … … … … … … … … … … … … … … … … … … … ..33-1 數位式同步控制器外觀... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ....... (3)3-2 控制器外觀尺寸... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ..... ... .. (4)3-3 控制器面板顯示及操作說明... ... ... ... ... ... ... ... ... ... .... ... ... ... ..... ... (4)3-3-1 LED 燈號說明... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... .5 3-3-2 按鍵操作說明... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ..... (5)首先感謝您選用由本公司所開發的RSC-406 數位式比例同步控制器。
為了充分地發揮 RSC-406 的功能,及確保使用者的安全,請詳閱本操作手冊。
當您使用中出現任何疑點而本手冊無法提供您解決方案時,請您與本公司連絡,我們將竭誠為您服務。
並請您繼續采用本公司的產品。
4.安裝… … … … … … … … … … … … … … … … … … … … … … … … … … .… … .....6!注意4-1 使用環境... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... .... ... .. (6)4-2 控制器後端護弓,端子安裝方式及盤面安裝尺寸... ... ... ... ... ... ... ... .. (6)5.配線... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ..... (7)5-1 端子功能說明... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... (7)5-2 標准配線圖… … … … … … … … … … … … … … … … … … … … … … … … ..85-3 控制回路配線圖... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... .. (9)5-4 變位回授控制配線圖... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... .10 5-5 手動/自動切換控制配線圖... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... . (11)6.參數說明... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... .. (11)7.電子差速器的運用… … … … … … … … … … … … … … … … … … … … … ...… ..138.比例K值及線速K值的設定... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... . (14)8-1 比例K 值的設定… … … … … … … … … … … … … … … … … … … … … … .148-2 線速K 值的設定… … … … … … … … … … … … … … … … … … … … ...… ..149.控制模式設定(參數1)… … … … … … … … … … … … … … … … … … … … .… ..1510.參數一覽表... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... .... .... (15)11.異常故障顯示與對策... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ..... (16)12.試車注意事項… … … … … … … … … … … … … … … … … … … … … … … ...… ..17附錄:外圍設備之選用... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... ... . (18)A. 譯碼器… … … … … … … … … … … … … … … … … … … … … … … … … … .18B. 變位檢出器… … … … … … … … … … … … … … … … … … … … … … … .....18不可在送電中實施配線,或拆裝RSC-406 的連接端子。
RSC-406 的端子6~21 均為控制器的回授信號與輸出信號接點,勿作為他用。
RSC-406 控制器的輸出端子20(+),21(-)絕對不可連接至AC 電源及異電壓進入。
請勿拆卸控制器外殼,及做控制器零件的耐壓測試。
RSC-406 之參數,於出廠時已作適當設定,除非特殊控制方式,可以不必重新設定參數。
2.產品特點介紹◎特點~2~3-2 控制器外觀尺寸控制外觀尺寸(單位: mm)RSC-406 采用RSIC 的MICROPOCESSOR 架構,全數字式的演算控制方式、多組隔離電源供應、以及高抗干擾性的信號輸出設計,具有兩組數字輸入、一組模擬輸入、一組模擬輸出;可配合DC 驅動器、變頻器等各種驅動器作比例同步連動控制。
RSC-406 采用譯碼器AB 相之數字信號回授輸入,且特別設計角位追蹤特性模式,對於多組馬達作精確之速度連動,能在測試或使用中清楚的顯示微小速度變化量,以利選擇最佳之參數使用,使機械運轉操作及設計連動精度,達到圓滿完美之要求。
RSC-406 具有自我檢測功能設計,除能檢測出譯碼器的AB 相是否接反並自動調整相位以省去生配線之不便外,更對異常狀況自我檢測顯示,以助異常判斷與排除。
RSC-406 減化PI 及參數設定的設計,可配合機械與生產… 等的改變,例如機械齒輪比調整、程序模態改變、微積分量、負載變化時間… … 等,使操作更簡單方便。
RSC-406 采用雙色雙顯示LED,可顯示速度比及線速度、轉速、角位差。
3.產品檢查3-1 數字式比例同步控制器外觀3-3 控制器面板顯示及操作說明3-3-1 LED燈號說明~4~4. 安裝4-1 使用環境~5~綠色工作燈: 當RSC-406 激活待機時(意即等待主機信號時)LED 燈閃爍,工作運轉時,LED 燈持續輸出.黃色參數修改燈: 當使用者進入RSC-406 參數群修改參數時,LED 不斷閃爍;待使用者離開參數設定時,LED 自然熄滅.紅色故障指示燈: 當系統偵測到異常狀況時,此燈亮.紅色LED(七段顯示器): 正常時可依模式的選擇顯示從馬達的速度或從之間的角位差; 於參數設定時顯示參數的序號; 當異常發生時可顯示異常代碼(關於此點請參閱異常故障顯示與對策).綠色LED(七段顯示器): 正常工作時顯示面板所設定的數值, 當參數設定時則顯示該參數的設定內容.3-3-2按鍵操作說明MODE 鍵: 按下”參數選擇鍵時”此時紅色LED 顯示參數序數,綠色LED顯示內容, 當再次按下本鍵時參數序數自動加一而參數內容的顯示也隨之改變.<▲>/<▼>: 使用”累加鍵”<▲>或”遞減鍵”<▼>修改參數的內容以及所欲設定的面板數值.SET 鍵: 當參數設定完成時按上”參數輸入鍵”,則RSC-406 將自動記憶此設定值,且由參數設定狀態回到一般狀態.附加功能說明! 注一: 當使用速度顯示模式時,可以使用以下方式調整顯示值.<MODE> + <▲>, 修改速度顯示由慢而快<MODE> + <▼>, 修改速度顯示由快而慢! 注二: 當欲修改小數位置時,設定方式如下.<SET> + <▲>, 修改上排小數點位置<SET> + <▼>, 修改下排小數點位置RSC-406 的安裝使用環境對RSC-406 的操作運轉功能及其使用壽命有直接的影響,因此使用及安裝的環境需符合以下條件:工作電源入力:交流220V±10% 50/60Hz消耗功率: <15 瓦特周圍溫度: 工作溫度(0℃~50℃/32℉~122℉)貯存溫度(-10℃~70℃/14℉~158℉)環境濕度: RH85%以下.回授信號: 譯碼器需使用電壓DC5V~30V, 相位角差90°±45°; 數字與模擬信線需與動力線分離.防止雨水、潮濕環境、油霧、鹽分、粉塵、金屬侵入.防止電磁干擾、遠離放射性物質可燃物.避免直接日曬.4-2 控制器後端護弓、端子安裝方式及盤面安裝尺寸盤面安裝尺寸(單位:mm):面板開孔尺寸:92*92mm5.配線~6~序號端子名稱功能說明RSC-406 出廠時,貼有一標准接線圖於控制器上方以利施工及試車,配線12 E1B13 E2BENCODER1 B 主馬達譯碼器輸入信號B 相ENCODER2 B 副馬達譯碼器輸入信號B 相時請注意端子編號。