基于凌阳SPCE061A单片机的音控小车的设计
基于SPCE061A的声控汽车的设计与实现

霹 圈
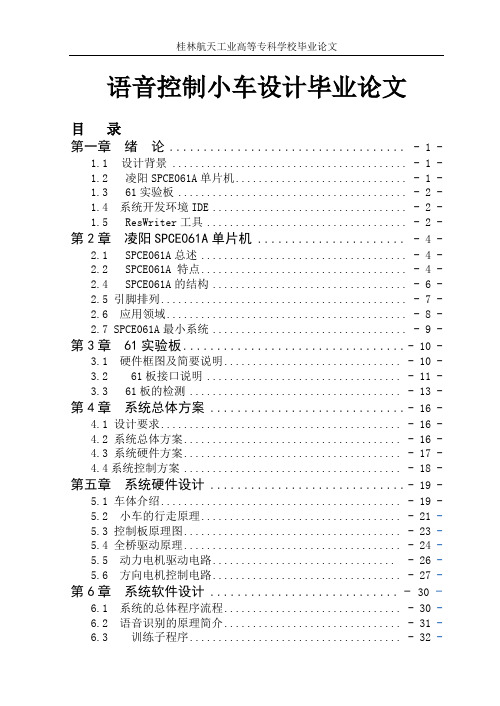
圈 1 声控小汽车总体架构 图
3 . 硬件设计
声 控 小 汽 车 在 硬 件 层 上 的 设 计 分 为 语 音 识 别 层 设
计、驱 动层设计和 车体设计 三部分 。语 音识别 层设计 由 S P C E O 6 1 A单片机构成,主要负者将接 收的声音信号转换 为
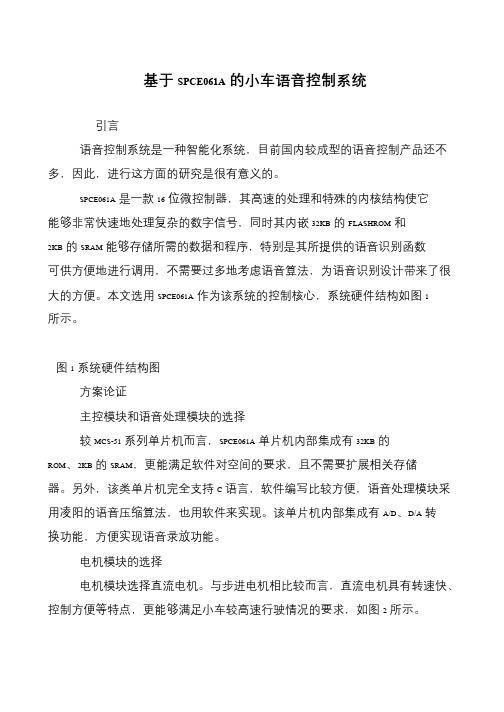
图 2 声 控 小汽 车 语 音 训练 和 识 别 的流 程 图
到的模板会和之前训练 的模板进行匹配,最接近 的…组将 作为识别结果输 出对应 的信息,这些信息将会通过 I / 0口 输 出到驱动模块 中。控制子程序的功能是 让电机正 向转动
或反向转动,从而 改变小汽车 的运动状态和方 向。具体流 程 如 图 2所示 。
2 O 世# g 2 0 年代 , 语音 识别技术就开始得到研 究 。 随后 , 各类语音识别系统相继诞生,语音识别技术也逐渐得到完 善 。最近几年,语音识别技术作 为一 门相对成熟 且与人 联系密切的技术,被广泛应用于各行各业中,本课题研究 的声控小汽 车,是希望语音识别技术 能运用到汽车中,让 汽车变得更加智能化 本课题研究设计的声控小汽车是对 语音识别功 能运用到汽车控制, 的初步探讨和简单设训‘ , 设计 ’ 出小汽车的整体模型,实现声音控制小汽车行驶 。 2 。 总体方案设计 声控 小汽 车采用 了凌阳 S P C E 0 6 1 A 作 为整 个小汽 车系 统的数据 处理 中心,该单片机具有语音识别和 语音播放的 功能 ,主要负责声音指令获取和识别 的工作 ,声音信 号 从M I C麦克风处传入 ,经过一系列的语音处理步骤 ,将模 拟信号转化为控制 电机 的数字信号 ,并把处理后 的数据通 过 I / o口输出。该设计 的基本架构如图 1 所示 。
信息 记录 材 料2 0 1 6 年l 2 月
基于凌阳spce061a单片机声控小车的设计(Word)

本科毕业论文(设计)题目: 基于凌阳SPCE061A声控小车的设计院系:物理与电子信息科学系专业:电子信息科学与技术******学号:************指导教师:***教师职称:讲师填写日期:2011年5月10日摘要语音识别是一门复杂的技术,它不仅包括语音的录制、播放、识别,还涉及语音信号的采集、压缩编码和解码等各项技术。
以往做语音识别有一般有两种途径。
一种是采用单片机进行扩展设计,另一种是利用专门的语音处理芯片。
普通的单片机往往不能实现这么复杂的过程和算法,即使勉强实现也要加很多的外围器件。
SPCE061A是凌阳科技推出的一款16位μ'nSP结构的微控制器,论文对系统的硬件电路和软件设计进行了分析与设计。
该系统具有结构简单, 很高的性价比,便于推广和应用。
借助于SPCE061A提供的语音特色,外只需设计一个H桥电机驱动电路,就比较容易实现语音控制小车的前进、后退、左转、右转停车等基本功能;关键字:SPCE061A、语音识别、声控小车、单片机。
AbstractSpeech recognition is a complex technology, which includes not only voice recording, playback, recognition, speech signal is also involved in the collection, coding and decoding and other technologies. Speech recognition in the past have usually done in two ways. A microcontroller is used to extend the designer, and the other is the use of specialized voice processing chips. Often fail to achieve common SCM process and algorithm of this complexity, even if we manage to achieve a lot of peripheral devices also increases.Sunplus SPCE061A is the launch of a 16-bit microcontroller μ'nSP structure, the paper system of hardware and software design analysis and design. The system is simple, highly cost-effective, easy promotion and application.With SPCE061A provides voice features, just outside the design of a H bridge motor drive circuit, relatively easy to implement voice control for car forward, backward, turn left, turn right to parking and other basic functions;Keywords: SPCE061A; speech recognition; voice-activated car; microcontroller.目录前言 (1)第一章语音识别的发展及前景 (2)第一节语音识别的发展历史 (2)第二节语音识别技术的应用前景 (3)第二章凌阳音频 (5)第一节音频背景知识 (5)第二节语音压缩编码基础 (5)第三节常见的几种音频压缩编码 (6)第四节语音合成、辨识技术的介绍 (7)第三章凌阳SPCE061A单片机简介 (9)第一节音频压缩算法的编码标准及分类 (10)第二节凌阳常用的音频形式和压缩算法 (10)第三节凌阳语音的播放、录制、合成和辨识 (11)第四节语音识别系统结构 (11)第四章语音控制器总体设计 (13)第一节设计要求 (13)第二节 61板简介 (14)第三节小车车体简介 (15)第五章语音控制器硬件设计 (17)第一节电源设计 (17)第二节 SPCE061A最小系统 (18)第三节程序下载模块 (19)第四节声音采集模块 (20)第五节播音模块 (21)第六节电机驱动电路的设计 (21)第六章语音控制器软件设计 (23)第一节凌阳u'nSP IDE的项目结构 (23)第二节声音压缩 (24)第三节语音录制 (26)第四节语音播放 (27)第五节语音识别 (29)第七章程序设计 (30)第一节主程序设计 (30)第二节功能子程序设计 (32)第三节语音资源表配置 (36)结论 (37)致谢 (38)主要参考文献 (39)附录 (40)附录A 元器件清单 (40)附录B 61板电路图 (41)前言单片机作为计算机技术的一个重要分支、嵌入式系统的先头兵,广泛应用于工业控制、智能仪器、机电一体化、家用电器、智能产品、个人数字处理领域。
基于凌阳SPCE061A的语音控制小车设计
语音控制是最为直接的人机对话方式,而小车以其生动、典型、学习形式喜闻乐见、涉及知识面广等特点,可作为电子类专业同学们学习、实践的良好载体。
凌阳SPCE061A单片机,具有简单的语音处理功能,不需要外挂语音处理芯片,因此采用SPCE061A作为主控芯片。
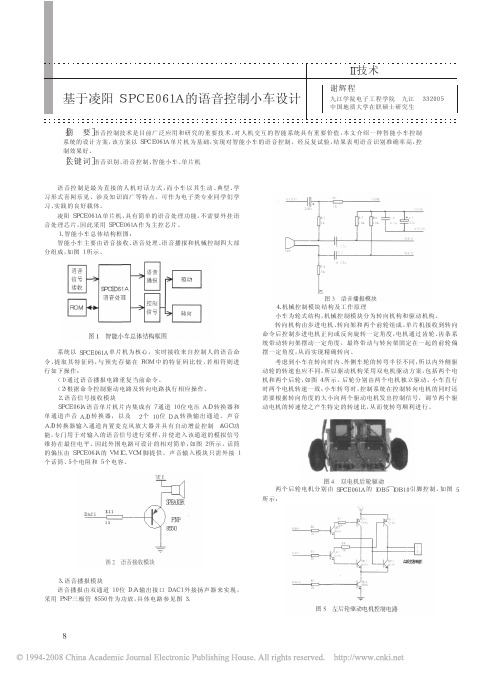
1、智能小车总体结构框图:智能小车主要由语音接收、语音处理、语音播报和机械控制四大部分组成,如图1所示。
图1智能小车总体结构框图系统以SPCE061A单片机为核心,实时接收来自控制人的语音命令,提取其特征码,与预先存储在ROM中的特征码比较,若相符则进行如下操作:(1)通过语音播报电路重复当前命令。
(2)根据命令控制驱动电路及转向电路执行相应操作。
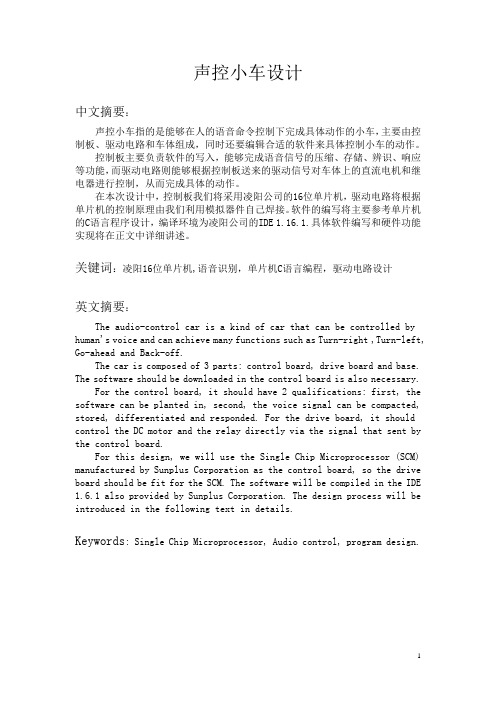
2、语音信号接收模块SPCE06lA语音单片机片内集成有7通道10位电压A/D转换器和单通道声音A/D转换器,以及2个10位D/A转换输出通道。
声音A/D转换器输入通道内置麦克风放大器并具有自动增益控制(AGC)功能,专门用于对输入的语音信号进行采样,并使进入该通道的模拟信号维持在最佳电平。
因此外围电路可设计的相对简单,如图2所示。
话筒的偏压由SPCE06lA的VMIC、VCM脚提供。
声音输入模块只需外接1个话筒、5个电阻和5个电容。
图2语音接收模块3、语音播报模块语音播报由双通道10位D/A输出接口DAC1外接扬声器来实现,采用PNP三极管8550作为功放,具体电路参见图3。
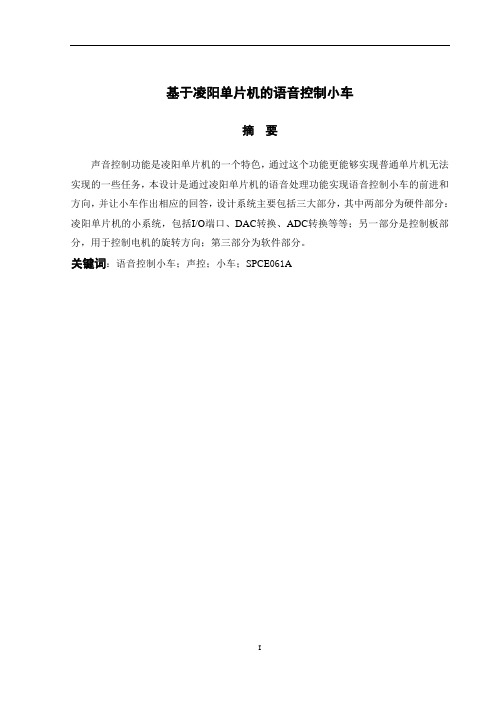
图3语音播报模块4、机械控制模块结构及工作原理小车为轮式结构,机械控制模块分为转向机构和驱动机构。
转向机构由步进电机、转向架和两个前轮组成。
单片机接收到转向命令后控制步进电机正向或反向旋转一定角度,电机通过齿轮、齿条系统带动转向架摆动一定角度,最终带动与转向架固定在一起的前轮偏摆一定角度,从而实现精确转向。
考虑到小车在转向时内、外侧车轮的转弯半径不同,所以内外侧驱动轮的转速也应不同。
所以驱动机构采用双电机驱动方案,包括两个电机和两个后轮,如图4所示。
SPCE061A单片机的无线语音控制智能小车的研制

微处理器应用 电 子 测 量 技 术 EL ECTRONIC M EASUREM EN TTEC HNOLO GY第31卷第12期2008年12月 基于SPCE061A 单片机的无线语音控制智能小车的研制3瞿少成 艾 宁 赵 桥(华中师范大学信息技术系 武汉 430079)摘 要:本文介绍了一种无线语音通信控制的智能小车的研制过程,给出了智能小车控制系统的硬件和软件设计。
以SPCE061A 单片机作为控制核心,使用无线语音传输方式采集语音信号,实现语音的实时检测与特定人声音的智能识别;通过红外光电传感器GY102W323E1检测障碍物,实现了自动避障。
实验结果表明,该系统实现了无线语音控制与系统智能避障,且功耗低,性能稳定,具有较强的推广价值。
关键词:SPCE061A ;无线语音控制;语音辨识;智能避障中图分类号:TP911 文献标识码:ADesign of wireless voice controlled intelligent toy car based on MCU SPCE061AQu Shaocheng Ai Ning Zhao Qiao(Depart ment of Information Technology ,HuaZhong Normal University ,Wu Han 430079)Abstract :The entire design for a wireless voice controlled intelligent toy car is introduced ;the hardware circuit and software design of control system for the intelligence toy car is given.Based on the MCU SPCE061A and wireless transmission way ,this system can detect real 2time voice signal and identify specific person efficiently.By applying inf rared 2photoelectric sensor GY102W323E1,the system can avoid the obstacles automatically.Experimental results show that the wireless voice controlled intelligent toy car is convenient ,stable and reliable ,and has high practical value.K eyw ords :SPCE061A ;wireless voice control ;voice recognition ;intelligent obstacle 2avoided 3基金项目:高等学校博士学科点专项科研基金资助(20070511017)与大学生国家级创新计划资助项目0 引 言随着人们生活水平的提高,当今玩具已不光是孩子的专利,更是变成了成人的新宠。
基于凌阳单片机的语音遥控小车

1 引言1.1 研究的背景与意义从这些数字可以看出,高科技含量的电子玩具已经成为玩具行业发展的主流,发展科技型玩具是必然趋势,不仅世界大玩具公司争相开发,世界电脑巨头微软、英特尔、IBM等,世界电器霸主松下、东芝、索尼也都垂青电子玩具,自己或与玩具厂商合作应用半导体技术、数码技术于玩具开发。
他们把这叫做“面向明天的玩具”。
美国麻省理工学院就得到迪斯尼等四家大公司资助数百万美元的研究开发经费。
科技、教育与玩具制造业的结合,将会是玩具业在技术上的又一次革命,将使玩具更可爱、更吸引人 [1] 。
1.2 国外研究现状与发展根据美国玩具协会的调查统计,近年来全球玩具销量增幅与全球平均GDP增幅大致相当。
而全球玩具市场的在结构比重却发生了重大变化:传统玩具的市场比重在逐步缩水,高科技含量的电子玩具则蒸蒸日上。
美国玩具市场的高科技电子玩具的年销售额2004年较2003年增长52%,而传统玩具的年销售额仅增长3%。
英国玩具零售商协会选出的2001年圣诞最受欢迎的十大玩具中,七款玩具配有电子元件[2] 。
近几年,欧洲电子玩具大幅增长[3] 。
在英国,电子类玩具将成为英国增长最快和市场最大的玩具,2007年英国玩具市场将达到61亿欧元;在德国,技术性玩具,如建筑、车辆和电子训练等玩具比其他欧洲国家更加流行[4] 。
1.3 可行性分析本设计的核心是凌阳的16位单片机(SPCE061A)。
该单片机采用凌阳最新推出的µ’nSP16 位微处理器核(以下简称µ’nSP)。
SPCE061A嵌32K字(Word)闪存(FLASH),2K字(Word)SRAM,有多达十四个的中断源等丰富的片资源。
CPU最高可工作在49MHz的主频下,较高的处理速度使µ’nSP能够非常容易地、快速地处理复杂的数字信号,这使得SPCE061A具有灵活的语音处理能力。
可以播放SACMA2000和SACMS480等格式的语音资料,而且还可以配置外部存储器,可以存储很长的声音段。
声控小车实验报告

实验报告课程名称电子线路综合设计实习题目61板声控小车专业班级学号学生姓名实习成绩指导教师年月一、子线路综合设计方法电子电路综合设计方法是指在提出一个设计任务或题目后,按照规定的技术指标和功能要求设计一个子系统电路的过程。
流程:1.仔细审题,分析技术指标:研究题目要求,各项技术指标的含义,了解出题者的意图。
2.设计总体框图,分配技术指标:分析立即题意,方法论证,参考资料,选择一种相对合理思路巧妙成本较低的设计方案3.设计单元电路,进行计算机仿真实验:在计算机上模拟仿真电路,修改参数,观测性能指标4.整机联调,测试技术指标:整机联调,发现,排除电路故障修改电路参数以满足方案要求风采集的语音信号与事先训练好的语音库的特征语音进行对比,进行语音辨识并通过语音命令小车行进、转向及倒库等操作。
音控小车总体结构如图1所示。
1. 2系统的核心部件SPCE061A 芯片内部集成了ICE、FLASH、SRAM、通用I/O 端口、定时器/计数器、中断控制、CPU 时钟锁相环、ADC、DAC输出、UART、SIO、低电压监测/低电压复位等模块[2-3]。
SPCE061A可以使外围电路大大简化,节省小车内部的空间,并且凌阳单片机具有语音功能,可以加入语音识别模块。
1. 3 小车电机驱动设计L298是SGS公司的产品,L298N为15个管角的单块集成电路,高电压,高电流,四通道驱动,设计用L298N来接收DTL或者TTL逻辑电平,驱动感性负载(比如继电器,直流和步进马达)和开关电源晶体管。
内部包含4通道逻辑驱动电路,其额定工作电流为 1 A,最大可达 1.5 A,Vss 电压最小4.5 V,最大可达36 V;Vs 电压最大值也是36 V。
L298N可直接对电机进行控制,无须隔离电路,可以驱动双电机。
根据L298N芯片的特点以及SPCE061A自身的特点,把IOA4~IOA7作为输出口,分别与L298N的IN1~IN4相接,其VS、VSS 分别接+12 V、+5 V电源,其输出口OUT1~OUT2接转向电机,OUT3~OUT4接驱动电机,根据设计要求,结合所编好的程序,根据所发语音命令,接收信号,便可给[P_IOA_DATA]传送数据,从而控制转向电机和驱动电机。
基于SPCE061A的语音控制智能小车设计

此以其为核心的嵌入式平台设计相对较为简单。整个小车系统
1辑窿 献 的硬件电路如图2所示,主要包括以下几部分电路。
ⅧIC Va
D^c1 ^vss]
^V鹞l
乍群冀。, 司t瑚 -IcP NI洲 脚
, ^Vss】
Io^3-l刚
0PI
一 叫三女 ‰。 I啷 ‰ 1嗍 k ^vss
图2系统硬件电路图
2.1麦克风录音输入及AGc电路 SPCE061A芯片中具有声音模一数转换通道,内置了麦克
关键词:sPcE061A;语音辨识;电机控制;自动避障
Design of Voice Control Intelligent Mini Vehicle Based on SPCE06 1 A
Han Dongbo, Zeng Bing, Ge Liangquan, Xiao Peng, Wang Fugang
maticany avoiding obstacles,and through voice to the car——the voice command,the car can do corresponding action and broadcast the cor—
responding voice. Key words:SPCE06lA;voice recognition;motor control;automatically avoiding obstacle
声控小车设计论文
声控小车设计中文摘要:声控小车指的是能够在人的语音命令控制下完成具体动作的小车,主要由控制板、驱动电路和车体组成,同时还要编辑合适的软件来具体控制小车的动作。
控制板主要负责软件的写入,能够完成语音信号的压缩、存储、辨识、响应等功能,而驱动电路则能够根据控制板送来的驱动信号对车体上的直流电机和继电器进行控制,从而完成具体的动作。
在本次设计中,控制板我们将采用凌阳公司的16位单片机,驱动电路将根据单片机的控制原理由我们利用模拟器件自己焊接。
软件的编写将主要参考单片机的C语言程序设计,编译环境为凌阳公司的IDE 1.16.1.具体软件编写和硬件功能实现将在正文中详细讲述。
关键词:凌阳16位单片机,语音识别,单片机C语言编程,驱动电路设计英文摘要:The audio-control car is a kind of car that can be controlled by human's voice and can achieve many functions such as Turn-right ,Turn-left, Go-ahead and Back-off.The car is composed of 3 parts: control board, drive board and base. The software should be downloaded in the control board is also necessary. For the control board, it should have 2 qualifications: first, the software can be planted in, second, the voice signal can be compacted, stored, differentiated and responded. For the drive board, it should control the DC motor and the relay directly via the signal that sent by the control board.For this design, we will use the Single Chip Microprocessor (SCM) manufactured by Sunplus Corporation as the control board, so the drive board should be fit for the SCM. The software will be compiled in the IDE 1.6.1 also provided by Sunplus Corporation. The design process will be introduced in the following text in details.Keywords: Single Chip Microprocessor, Audio control, program design.目录:前言 (3)一、硬件电路设计及连接 (3)1.1 SPCE061A (3)1.1.1 SPCE061A总述 (3)1.1.2SPCE061A 性能 (3)1.1.3 选择SPCE061A的理由 (4)1.1.4 凌阳16位单片机SPCE061A实物图 (4)1.1.5 SPCE061A内部结构框图 (5)1.2.车体驱动电路 (6)1.2.1车体驱动电路设计思路 (6)1.2.2实际驱动电路 (7)1.3、小车车底部分 (8)1.4.硬件部分结论 (8)二、软件编写与调试 (9)2.1主程序流程图 (9)2.2 控制口连接方式 (10)2.3.RAM中数据存取方式 (11)2.4语音训练和识别 (12)2.4.1语音命令训练过程 (12)2.4.2语音识别过程 (13)2.5 具体动作的实现 (13)2.6语音命令的重新训练 (14)2.7程序的组成和调试 (14)2.8程序代码下载 (15)三、小车的操作说明: (15)3.1使用方法 (15)3.2使用时的注意事项 (15)四、结论 (16)五、参考书目 (16)正文:前言:本次设计的目的是利用凌阳16位单片机SPCE061A的语音播放和语音识别资源进行语音控制,使小车能在具体的语音命令下完成前进、后退、左拐、右拐的动作。
基于凌阳单片机的语音控制小车---毕业设计 - 副本
基于凌阳单片机的语音控制小车摘要声音控制功能是凌阳单片机的一个特色,通过这个功能更能够实现普通单片机无法实现的一些任务,本设计是通过凌阳单片机的语音处理功能实现语音控制小车的前进和方向,并让小车作出相应的回答,设计系统主要包括三大部分,其中两部分为硬件部分:凌阳单片机的小系统,包括I/O端口、DAC转换、ADC转换等等;另一部分是控制板部分,用于控制电机的旋转方向;第三部分为软件部分。
关键词:语音控制小车;声控;小车;SPCE061ABased on Ling Y ang monolithic integrated circuit's voice control carAbstractThe phonic control function is a Ling Y ang monolithic integrated circuit's characteristic, suffices some duties which through this function realizes the ordinary monolithic integrated circuit to be unable to realize, this design is realizes the voice control car's advance and the direction through the Ling Y ang monolithic integrated circuit's pronunciation processing function, and lets the car make the corresponding reply, the design system mainly includes three major parts, two parts for hardware part: The Ling Y ang monolithic integrated circuit's small system, including the I/O port, DAC transforms, ADC transformation and so on; Another part is the control panel part, uses in controlling electrical machinery's hand of rotation; The third part is the software part.Key word: V oice control car;V oice control;Car;SPC061A目录1 引言 (1)2方案论证 (2)2.1方案论证 (2)3语音控制小车设计要求 (3)3.1功能要求 (3)3.2备注 (3)3.2.1 参数说明 (3)3.2.2 注意事项 (3)3.3扩展功能 (3)4 凌阳芯片的介绍 (4)4.1SPCE061A芯片的特点及其功能 (4)4.2SPCE061A芯片内核结构 (5)5硬件系统设计 (6)5.1系统的总体方案 (6)5.1.1 16位微处理器芯片的外围结构 (6)5.261板的各部分硬件模块 (7)5.2.1 麦克录音输入及AGC电路 (7)5.2.2 数摸转换电路 (7)5.2.3 按键,LED和复位电路 (8)5.2.4 电源电路 (8)5.2.5 下载线接口电路和在线调制电路 (9)5.2.6 16位微处理器的连接电路 (9)5.3车体介绍 (10)5.4小车的行走原理 (10)5.5控制电路原理板 (11)5.6控制电路原理 (12)5.6.1 后轮电机驱动电路原理 (12)5.6.2 前轮电机驱动电路原理 (13)6 系统软件设计 (14)6.1系统主程序设计流程图 (14)6.2语音识别 (15)7硬件制作及系统调试 (17)7.1硬件制作 (17)7.2调试和下载程序 (17)7.3调试小车 (17)7.4初试小车 (17)7.5重新调试 (18)结束语 (19)致谢 (20)参考文献 (21)附录附录1 电路原理图(61板)附录2 电路原理图(控制板)附录3 元件清单附录4 PCB图附录5 小车图片附录6 主控制源程序基于凌阳单片机的语音控制小车1 引言语音控制技术是一门新兴技术,可以通过语音直接控制电子产品,摆脱了遥控器的束缚。
基于SPCE061A单片机的无线语音控制智能小车的研制
眦
向接 近 于一 项 科技 产 品 , 在它 们 身上 , 用 者 可 以体 会 到 使
享受科 技 的那 种 快感 。语 音 控 制 作 为 最直 接 的人 机 交互
控制 与系统智 能避 障 , 且功耗低 , 性能稳定 , 具有较强的推广价值 。 关键 词:S C 0 1 无 线语 音控制 ; P E 6 A; 语音辨识 ; 能避 障 智
中 图 分 类 号 :TP 1 91 文 献 标 识 码 :A
De i n o r l s o c o t o ld i e lg ntt y c r s g fwi e e s v i e c n r le nt li e o a
b s d o CU PCE0 A a e n M S 61
QuS a c e g Ai n Z a a h o h n g h oQi Ni o
( p rme to n o ma in Tehn lg De a t n fI f r t c oo y,Hu Z o g No a iest ,W u n 4 0 9 o a h n r lUnv r iy m Ha 3 07 )
摘
要 :本文介绍 了一种无线语音通信控 制 的智 能小车 的研制过程 , 出 了智 能小车控制 系统 的硬件 和软件设 计 。 给
以 S C 01 P E 6 A单 片机 作为控制核 心 , 使用 无线语音传输 方式采集语 音信号 , 实现语音 的实时检测 与特定人声音 的智
能识别 ; 通过红外光电传感器 GY 0W33 检测 障碍 物 , 现 了 自动避障 。实验 结果表 明 , 系统实 现 了无 线语音 1 - —El 实 该
基于SPCE061A单片机的智能小车的设计

其内 部集成 了I C E 、 F L A S H、 S RA M、 3 2 位 通
的车 轮 做 支 撑 作 用 。 该 步 进 电 机 采 用 单 极 2. 1语言 识别系统
只 要 对 步 进 电 机 的 各 相 语 音识 别系 统 主 要 分 为 初 始化 、 训练 、 用I / O端 口、 ADC、 DAC 输出、 定时 器 / 计 数 性 直 流 电源 供 电 , 就 能 使 步 进 电机 识 别 三 个部 分 , 基 于 凌阳S PCE 0 6 1 A本 身就 器、 Wa t c h Do g、 中断 控 制 、 CP U时钟 PL L、 绕组 按 合 适 的 时 序 通 电 , UAR T、 S I O、 低 电压 监测 / 低 电压 复 位等 模 块…。 S P C E 0 6 1 A可 以使 外 围电路 大大 简 化 ,
1 系统的总体设计方案和硬件设计
本设计 主要有 三个部分 组成 , 分 别 是
不能 直接和 电机相连 , 本 文 采 用 的 是 双 全
计实现方便。 该模 块 采 用 I / 0触 发 测 距 , 给
0 U S 的高 电平信 号 , 模 块 自动 发送 8 个 桥 步 进 电机 专 用 驱动 芯片 L 2 9 8 N[ 1 。 L 2 8 9 芯 至 少 1
片有 1 6 个 引脚 , 内包 含 4 通道 逻辑 驱动 电 4 0 k H z 的方 波 , 自动检 测 是 否 有信 号返 回 ;
路, 是 一 种 二 相 和 四 相 步 进 电 机 的 专 用 驱 若 有 信 号 返 回 , 通过I / 0 输 出一 高 电 平 , 高
动器 , 可 同时 驱 动 2 个 二相 或 1 个 四 相步 进 电 平持 续 的 时 间就 是 超 声 波 从 发射 到 返 回 的时 间 。 测 试 距 离 =( 高 电 平 时 间 X声 速 ( 3 4 0 m/ s ) ) / 2 。 测 量 周期 为6 0 ms 超 声波时 序
语音控制小车设计毕业论文
语音控制小车设计毕业论文目录第一章绪论................................... - 1 -1.1设计背景 ......................................... - 1 -1.2 凌阳SPCE061A单片机.............................. - 1 -1.3 61实验板........................................ - 2 -1.4 系统开发环境IDE .................................. - 2 -1.5 ResWriter工具................................... - 2 - 第2章凌阳SPCE061A单片机 ...................... - 4 -2.1 SPCE061A总述.................................... - 4 -2.2 SPCE061A 特点.................................... - 4 -2.4 SPCE061A的结构.................................. - 6 -2.5 引脚排列........................................... - 7 -2.6 应用领域.......................................... - 8 -2.7 SPCE061A最小系统.................................. - 9 -第3章 61实验板................................. - 10 -3.1 硬件框图及简要说明............................... - 10 -3.2 61板接口说明.................................. - 11 -3.3 61板的检测..................................... - 13 -第4章系统总体方案 ............................. - 16 -4.1 设计要求.......................................... - 16 -4.2 系统总体方案...................................... - 16 -4.3 系统硬件方案...................................... - 17 -4.4系统控制方案...................................... - 18 -第五章系统硬件设计 ............................. - 19 -5.1 车体介绍.......................................... - 19 -5.2 小车的行走原理................................... - 21 -5.3 控制板原理图...................................... - 23 -5.4 全桥驱动原理...................................... - 24 -5.5 动力电机驱动电路................................ - 26 -5.6 方向电机控制电路................................. - 27 -第6章系统软件设计 ............................ - 30 -6.1 系统的总体程序流程............................... - 30 -6.2 语音识别的原理简介............................... - 31 -6.3 训练子程序..................................... - 32 -6.4 语音识别子程序................................. - 34 -6.5 动作子程序...................................... - 34 -6.6 中断子程序...................................... - 36 -6.7 程序中需要说明的几个问题......................... - 37 - 第7章系统开发环境 ............................ - 39 - 第8章语音小车的使用 .......................... - 40 -8.1 连接硬件......................................... - 40 -8.2 代码下载......................................... - 40 -8.3 训练小车......................................... - 41 -8.4 声控小车......................................... - 42 -8.5 重新训练......................................... - 43 - 结语........................................ - 44 - 致谢........................................ - 45 - 参考文献........................................ - 46 - 附录一:语音控制小车源代码 .................... - 47 -第一章绪论1.1设计背景语音处理技术是一门新兴的技术,它不仅包括语音的录制和播放,还涉及语音的压缩编码和解码,语音的识别等各种处理技术。
基于SPCE061A的小车语音控制系统
基于SPCE061A的小车语音控制系统
引言
语音控制系统是一种智能化系统,目前国内较成型的语音控制产品还不多,因此,进行这方面的研究是很有意义的。
SPCE061A是一款16位微控制器,其高速的处理和特殊的内核结构使它能够非常快速地处理复杂的数字信号,同时其内嵌32KB的FLASHROM和
2KB的SRAM能够存储所需的数据和程序,特别是其所提供的语音识别函数
可供方便地进行调用,不需要过多地考虑语音算法,为语音识别设计带来了很大的方便。
本文选用SPCE061A作为该系统的控制核心,系统硬件结构如图1 所示。
图1系统硬件结构图
方案论证
主控模块和语音处理模块的选择
较MCS-51系列单片机而言,SPCE061A单片机内部集成有32KB的ROM、2KB的SRAM,更能满足软件对空间的要求,且不需要扩展相关存储器。
另外,该类单片机完全支持C语言,软件编写比较方便,语音处理模块采用凌阳的语音压缩算法,也用软件来实现。
该单片机内部集成有A/D、D/A转
换功能,方便实现语音录放功能。
电机模块的选择
电机模块选择直流电机。
与步进电机相比较而言,直流电机具有转速快、控制方便等特点,更能够满足小车较高速行驶情况的要求,如图2所示。
声控小车

学士学位毕业设计(论文)基于单片机的声控小车学生姓名:XXX指导老师:X X所在学院:信息技术学院专业:电气工程及其自动化中国·大庆2015 年 5 月摘要本文主要设计一种用语音进行控制的单片机小车。
声控小车以拥有可编程音频处理的凌阳SPCE061A单片机作为整个系统的控制核心,不需要添加额外的语音芯片就能实现语音控制功能;声控小车采用H桥电路控制小车电机转动,根据语音识别技术,采用C语言进行编程,实现小车的前进、停止左转和右转,以及语音播报功能。
关键词:SPCE061A 声控小车语音识别H桥电路ABSTRACTThis paper states the design of a voice control car based on single chip microcomputer. In hardware design of the car, we use SPCE061A as the control center in the system, which have programmable audio processing and can realize voice control function without additional voice chip. V oice control car use H- bridge circuit to control the car motor rotation, according to the speech recognition technology, using C language programming, realize the car forward, stop, turn left, turn right and voice broadcast.Keywords: SPCE061A V oice control car Speech recognition technology H- bridge circuit目录摘要 (I)ABSTRACT ........................................................................................ I I 前言 (IV)1绪论.............................................................................................. - 1 -1.1国内外研究发展和现状 ........................................................ - 1 - 1.2研究主要内容......................................................................... - 2 -1.3研究的目的和意义................................................................. - 3 -2 小车的设计方案......................................................................... - 4 -2.1设计方案的选择..................................................................... - 4 -2.2整体设计方案......................................................................... - 4 -3 系统的硬件设计......................................................................... - 7 -3.1 MCU核心控制模块设计 ...................................................... - 7 - 3.2语音识别模块的设计........................................................... - 10 - 3.3 电机及其驱动电路模块设计 ............................................. - 13 -3.4电源模块............................................................................... - 15 -4 系统的软件设计....................................................................... - 17 -4.1语音模块程序设计............................................................... - 18 - 4.2电机控制模块程序设计 ...................................................... - 19 - 4.3主程序设计........................................................................... - 20 - 结论............................................................................................... - 22 -参考文献....................................................................................... - 23 -致谢............................................................................................... - 25 -附录一声控小车硬件原理图 .................................................... - 26 -附录二声控小车程序................................................................. - 27 -前言随着人们生活水平的提高,电子产品的快速发展,普通电子产品的消费已经满足人们需求。
基于单片机的语音控制小车

基于单片机的语音控制小车设计摘要随着电子工业的发展,具有语音控制功能的小车越来越受到人们的青睐,在人们的日常消费生活中起着不可忽视的作用。
目前,声控技术已在很多领域得到使用。
本文对语音控制功能的小车概况做了阐述。
在硬件设计方面,本论文以凌阳公司的SPCE061A单片机为控制核心,以语音小车控制电路板为辅,设计小车的动作。
完成了电源电路、复位电路、键盘电路、音频输入电路,音频输出电路和无线控制电路等硬件功能模块的设计。
在软件方面,利用C语言进行编程,进行语音的“训练”和“识别”。
设计出具有如下功能的语音声控小车:能够根据录制的语音命令来控制小车的前进,后退,左转,右转的功能。
测试表明,在环境背景噪音不太大,控制者的发音清晰的前提下,语音控制小车的语音识别系统能对特定的语音指令做出智能反应,做出预想中的有限的动作。
论文首先对系统的方案进行论证,然后对各单元的软件、硬件工作原理进行了阐述,并介绍了系统的主要组成部分情况。
关键词:SPCE061A,语音识别,全桥驱动,小车IVoice control car design based on single chipmicrocomputerAbstractWith the development of the electronics industry, the voice - the control car become more and more popular to people. And it plays an important role in people 's daily life. At present, the voice - activated technology has had 2 in many fields, For example, voice - activated phone. Only if you called out the names you want and it automatically called to the telephone.This article gives a detail to the voice-activated car. In hardware design, the paper use Sunplus SPCE061A as the control of core. On the software, we use C language programming for voice "training"and"recognition". .Completedthepowercircuit,resetcircuit,keyboardcircuitry,audioinput circuits,audiooutputcircuitandcontrolcircuitofwirelesshardwaresuchasthedesignoffunctionmodule s.It has the following features: According to recorded the voice command to control the car to start, stop,turn right , and turn left. Tests have shown that background noise in the environment is not too big, the controller under the premise of clear pronunciation, voice control car voice recognition system can make intelligent response to a particular voice commands, limited, as expected.First of all, cca shut confirm the system of the program, and then describe the unit 's software and hardware as well as introduce the main components of the situation.Key words:S PCE061A,Speech Recognition,Full-bridge ,driver,TrolleyII目录摘要 (I)Abstract (II)第1章绪论.......................................................................................................................... - 1 -1.1 选题的目的和意义.................................................................................................... - 1 -1.1.1选题目的............................................................................................................. - 1 -1.1.2.选题意义............................................................................................................. - 1 -1.2 语音小车的发展及现状............................................................................................ - 1 -1.3 课题的目的任务和要求............................................................................................ - 2 - 第2章语音小车的方案论证.................................................................................................. - 3 -2.1 语音控制方案............................................................................................................ - 3 -2.2 方案论证.................................................................................................................... - 4 -2.2.1 采用DSP+FPGA方案 ...................................................................................... - 4 -2.2.2采用MCS-51方案 ............................................................................................. - 4 -2.2.3 采用凌阳61方案.............................................................................................. - 5 -2.3 系统控制方案............................................................................................................ - 6 - 第3章系统硬件设计.............................................................................................................. - 9 -3.1 系统硬件总体设计.................................................................................................... - 9 -3.2 系统各单元设计...................................................................................................... - 10 -3.2.1 控制单元设计.............................................................................................. - 10 -3.2.2 动力单元设计.............................................................................................. - 15 -3.2.3 音频单元设计.............................................................................................. - 16 -3.2.4 小车单元设计.............................................................................................. - 19 -3.3 系统总体电路图...................................................................................................... - 25 - 第4章系统软件设计............................................................................................................ - 26 -4.1系统总体程序设计................................................................................................. - 26 -4.2 系统各分支设计..................................................................................................... - 28 -4.2.1训练子程序....................................................................................................... - 28 -4.2.2语音识别子程序............................................................................................... - 29 -III4.2.3动作子程序....................................................................................................... - 31 -4.2.4中断子程序....................................................................................................... - 34 - 第5章系统调试.................................................................................................................... - 37 -5.1 硬件调试.................................................................................................................. - 37 -5.2 软件调试.................................................................................................................. - 38 -5.3 系统联调.................................................................................................................. - 39 - 结论........................................................................................................................................ - 41 - 参考文献.................................................................................................................................. - 43 - 致谢........................................................................................................................................ - 45 - 附录........................................................................................................................................ - 47 -IV第1章绪论1.1 选题的目的和意义1.1.1选题目的通过设计一个用单片机控制的语音小车来熟悉模块化编程方法,掌握C语言汇编语言的程序设计和调试方法,并理解单片机的原理、结构、指令;运行模式及应用方法。
基于单片机语音控制小车的设计

一、论文的主要内容
1.语音识别技术的概述 2.SPCE061A单片机的介绍 3.系统设计 4. 硬件调试
1.语音识别技术的概述
语音识别技术是一门交叉学科,正逐步成为信 息技术中人机接口的关键技术,语音识别与语 音合成结合使人们能够甩掉键盘,通过语音命 令进行操作。这样既可以方便用户,又可以实 现保密功能,语音技术的应用已经成为一个具 有竞争性的新兴高技术产业。
1)它整合了多个常用的功能模块,让我们在进行系 统开发的时不用外加过多的硬件就可方便的完成一个 系统的设计。 2)耗电少,可以满足很多手提设备、掌上设备低能 耗的需求。 3)可方便的用来实现声音录制、播放, 音乐合成和 语音识别。 4)可方便的完成一系列乘加的运算,实现一些数据 处理比较容易。 5)芯片里具备在线仿真调试电路,使调试和程序下 载更加方便,比较经济。
低电压监测/ 低电压复位 Watchdog 串行异步通讯接口
IOB7(RXD) IOB10(TXD)
双通道 10位DAC 串行输入输出接口
IOB0 (SCK) IOB1(SDA)
AUD1 AUD2
32 管脚通用输入输出端口
IOA15 - 0
IOB15 - 0
(2)SPCE061A单片机的优点
0
1 0 0
1
0 1 1
正转
反转 正转 正转
停转
停转 正转 反转
前进
倒退 左前传 右前转
语音小车控制板的PCB板
(5)软件设计
1)主程序流程图
2)训练程序流程图
开始训练 训练名称 训练左转指令 训练成功 Y N
训练成功
Y 训练右转指令
基于SPCE061A的语音控制小车
理论探讨255作者简介:张家辉(1997— ),男,汉族,内蒙古乌兰察布人。
主要研究方向:电子信息科学与技术。
随着计算机技术、模式识别和信号处理技术及声学技术等的发展,使得能满足各种需要的语音识别系统的实现成为可能。
近二三十年来,语音识别在工业、军事、交通、医学、民用诸方面,特别是在计算机、信息处理、通信与电子系统、自动控制等领域中有着广泛的应用。
当今,语音识别产品在人机交互应用中已经占到越来越大的比例。
本小车采用SPCE061A单片机作为检测和控制核心,是一个具备语音功能的16位结构微控制器,基于unsp内核,具有DSP 运算功能,内置10位A/D及D/A转换器,丰富的软硬件支持,采用语音进行控制,设计新颖、操做方便,可靠性好、扩展容易、应用范围广、实用性强。
一、硬件部分设计(一)语音录制、识别和播放语音识别一般分两个步骤:第一步是系统“学习”或“训练”阶段。
这一阶段的任务是建立识别基本单元的声学模型以及进行文法分析的语言模型,即构建参考模式库;第二是“识别”或“测试”阶段。
根据识别系统的类型选择能够满足要求的一种识别方法,采用语音分析方法分析出这种识别方法所需求的语音特征参数,按照一定的准则和测度与参考模式库中的模型进行比较,通过判决得出结果。
由麦克风接收语音输入,转换为电压信号,经自动增益控制器(AGC)调理,通过ADC转化为数字量,在处理器中压缩编码存到存储器中,作为语音资源;语音识别是将对使用者输入的语音命令进行记录并与存储的语音模型进行匹配,用来确定输入的指令;语音播放是将语音资源中的语音信息进行解码,解码后的语音信息数字量送到DAC转换为模拟量,经过音频放大器,输出到喇叭放出声音。
(二)小车运动姿态控制原理小车为四轮结构,前面两轮由前轮电机控制,在连杆和支点作用下控制前轮左右摆动,以调节小车前进方向,后面两轮由后轮电机驱动,为整个小车提供动力,控制小车的前进和后天退。
驱动电路使用“H”桥式功率驱动电路,由单片机的I/O口输出控制信号。
单片机课程设计----凌阳spce061a声控小车

单片机课程设计----凌阳spce061a声控小车核准通过,归档资料。
未经允许,请勿外传~课程名称,设计题目,院系,班级,设计者,学号,指导教师,设计时间,课程设计任务书姓名: 院 (系):专业: 班号:任务起至日期: 年月日至年月日课程设计题目: 智能声控小车已知技术参数和设计要求:已知技术参数:1. 凌阳SPCE061A型单片机最小开发系统一套,包括电源接口、IO接口、音频输出接口、MIC输入接口及程序下载接口;2. 小车额定工作电压4.5V(3节干电池)。
设计要求:1. 正确焊接电路板,完成单片机最小系统的调试;2. 利用61板实现语音控制小车的基本功能,包括前进、倒车、左拐和右拐的功能;3.根据自己能力,完成机器人附加功能。
工作量:总工作时间为10天;完成凌阳SPCE061A型单片机最小系统的焊接与调试工作;设计程序流程图并编写、调试程序;车体与单片机最小系统连接调试,完成设定的功能;最后撰写开题报告和结题报告各一份。
工作计划安排:同组设计者及分工:指导教师签字___________________年月日教研室主任意见:教研室主任签字___________________年月日 *注:此任务书由课程设计指导教师填写摘要:本文对声控小车概况做了阐述。
在硬件设计方面,本文以凌阳科技公司的SPCE061A单片机为控制核心,以语音小车控制电路板为辅,设计小车的动作。
在软件方面,利用C语言进行编程,进行语音的“训练”和“识别”。
设计出具有如下功能的语音识别声控小车:能够根据录制的语音命令来控制小车的前进、后退、左拐和右拐。
关键词:SPCE061A 语音识别声控小车一、引言所谓声控技术其实也就是利用语音识别技术来达到控制或者操作的一种技术,而语音识别技术这近五年来已经有很大的进步,最新的语音识别技术可以辨识90%以上的人类说出的字。
声控技术虽然是一项比较先进的技术,但不可否认的是,声控技术在无线传输时的合成的质量不是很好,它尚需进一步提高,因为无线环境中的背景噪声太大了,当然还有其他方面的因素影响着声控功能的发挥。
基于凌阳SPCE061A单片机的语音控制小车的研究

太原理工大学现代科技学院毕业设计(论文)摘要语音识别技术是使机器通过识别和理解把语音转变为相应的文本或命令的技术。
语音识别是一门交叉学科,正逐步成为信息技术中人机接口的关键技术。
目前语音识别系统按核心硬件来分主要有:以PC机为核心硬件的语音识别系统和以专用芯片为核心的语音识别系统。
本课题主要阐述了一种非常适合语音处理的单片机——凌阳SPCE061A的原理,并实现了基于凌阳SPCE061A单片机的语音遥控小车。
本文主要工作包括,首先介绍了语音识别基础知识以及常用的语音识别算法,然后根据嵌入式系统的特点和本课题所要求实现的具体功能,给出了基于凌阳SPCE061A单片机的语音遥控小车系统硬件和软件设计的总体方案。
论文同时介绍了凌阳公司提供的集成开发环境µ’nSP IDE,利用该软件实现了程序下载和仿真调试,经调试正确的程序运行在单片机上,使用已有的语音识别算法,根据语音命令实现了小车运动方向的控制。
此系统不仅具有体积小、耗电省、价格低、性能可靠的特点,还具有较快的运算速度、较高的识别率,可实现实时的语音识别。
本系统的语音提示功能为人机交流提供了一个良好的界面。
关键字:语音识别,SPCE061A单片机,61开发板,仿真THE RESEARCH OF SPEECH CONTROLING CARI太原理工大学现代科技学院毕业设计(论文)BASED ON SUNPLUS SCM SPCE061AABSTRACTThe speech recognition technology is a high technology, which make the machine change the speech into homologous text or order by recognition and comprehend. The speech recognition is a cross-subject, and it is becoming the key-technology of human-computer interface in information technology.At present, according to the difference of hardware core, the speech recognition system includes: the speech recognition system using PC as its hareware core and the speech recognition system using special chip. The article introduces a microcontroller which fits to processing speech--SUNPLUS SPCE061A microchip and its principle, achieve the speech controling car based on SPCE061A.The article main work includes: firstly, introduces the fundamental knowledge of speech recognition and several speech recognition algorithms, then give the hardware and software design of the speech controling car based on the SPCE061A system according to the characteristics of the embedded system and the particular requirements of the project. Then, the article also introduces the software tool called µ’nSP IDE from SUNPLUS. By using the software we can download the program to the SPCE061A and debug programs. Finally, we use the SUNPLUS’speech recognition algorithms, the car movement direction can be controlled according to the speech command.The Speech Recognition System not only has small size, economic power consumption, low cost and high reliability, but also has high operation speed, high recognition veracity and the realization of real-time speech recognition. Furthermore, in the system, the function of speech cue offers a favorable interface to human-computer interaction.KEY WORDS: Speech Recognition, SPCE061A Microcontroller, Motherboard Of SPCE061A, SimulationII太原理工大学现代科技学院毕业设计(论文)目录摘要 (I)ABSTRACT (II)第一章绪论 (1)第二章语音处理与识别技术基础 (3)2.1 概述 (3)2.2 语音信号分析技术 (3)2.2.1 滤波与A/D转换 (3)2.2.2 预处理 (3)2.2.3 语音信号的时域分析 (4)2.2.4 语音信号的线性预测分析 (5)2.3 语音信号识别技术 (5)2.3.1 矢量量化技术 (7)2.3.2 隐马尔可夫模型 (7)2.4 语音识别的发展历史 (8)2.5 语音识别系统的分类 (9)2.6 语音识别的难点 (9)2.7 嵌入式语音识别系统硬件组成 (9)第三章凌阳SPCE061A单片机简介 (11)3.1 概述 (11)3.2 主要性能 (11)3.3 结构 (11)3.3.1 芯片的引脚排列和说明 (12)3.3.2 SPCE061A系统特性参数 (15)3.4 61板介绍 (15)3.4.1 61板的结构和功能 (15)3.4.2 SPCE061A最小系统 (17)3.4.3 SPCE061A开发方法 (19)3.4.3.1 PROBE方式 (19)3.4.3.2 EZ_PROBE方式 (21)第四章 SPCE061A单片机的语音处理 (23)4.1 概述 (23)4.2 凌阳常用的音频形式和压缩方法 (23)4.2.1 音频形式和压缩算法 (23)4.2.2 语音压缩具体操作方法 (29)4.3 凌阳语音识别算法 (31)4.3.1 初始化 (31)4.3.2 训练部分 (32)4.3.3 辨识部分 (32)4.3.4 中断部分 (33)4.4 本章小结 (34)第五章语音遥控小车的设计 (36)1太原理工大学现代科技学院毕业设计(论文)5.1 概述 (36)5.2 语音遥控小车硬件设计 (36)5.2.1 系统设计方案 (36)5.2.2 系统控制方案 (37)5.2.3 具体硬件设计 (37)5.2.3.1 车体介绍 (37)5.2.3.2 控制板介绍 (41)5.2.3.3 硬件的连接 (44)5.3 语音遥控小车软件设计 (48)5.3.1 训练子程序 (50)5.3.2 语音识别子程序 (51)5.3.3 中断子程序 (53)5.3.4 动作子程序 (54)5.4 软件的下载与仿真调试及结果分析 (55)5.4.1 软件的下载 (55)5.4.2 软件的仿真调试 (58)5.4.3 仿真调试结果分析 (62)5.4.4 实物效果验证 (62)5.5 本章小结 (62)第六章总结与展望 (63)参考文献 (64)致谢 (65)附录1 语音遥控小车源代码 (66)附录2 中英文对照参考文献 (75)附录3 凌阳61A板电路原理图 (97)2太原理工大学现代科技学院毕业设计(论文)第一章绪论语音识别是语音信号处理的重要研究方向之一,它是一门涉及面很广的交叉学科,与计算机、通信、语音语言学、数理统计、信号处理、神经生理学、神经心理学、模式识别、声学和人工智能等学科都有密切的联系。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
参考文献(5条) 1.COX I.BALNCHE J An expermient in gudiance and gravtiaiton of an autonomous vechicel 1991(2) 2.罗亚非 凌阳十六位单片机应用基础 2003 3.薛均义.张彦斌 凌阳十六位单片原理及其应用 2003 4.侯媛彬 凌阳单片机原理及其毕业设计精选 2006 5.北阳公司内部技术资料.μ'nSP单片机 2001
新训练;如果已经训练过会把存储在FLASH中的模型 调出来装载到辨识器中。
(3)识别部分:在识别环节当中,如果辨识结果是名 字,停止当前的动作并进入待命状态,然后等待动作命 令。如果辨识结果为动作指令,小车会语音告知相应动 作,并执行该动作,在运动过程中可以通过呼叫小车的
名字使小车停下来。 (4)重训操作:考虑到有重新训练的需求,设置了重
经过反复试验证实,sTl78红外线光电传感器的发 射管要加500 Q的电阻用来限流,而接收管则要接20 kQ 上拉电阻,两管均接5v电源,工作时电压达到4.8 V,当 距离发射头或接收头1cm左右的位置有障碍物阻挡时电 压迅速降到1 v。具体电路如图3所示。
V∞
R4 O.1K
GND
图3反射式红外传感器接线图
c岍ent 8peed reduction electric motor LSl7Ru419i,dri“ng ehip L298N of electrical motor,photoelectric tr帅sducer of infhred ray sTl78 are
considered聃tlIe main contml modIlIes in the design.The hardware circllit and soflware design of inteUigent con打ol system is designed,iIlcluding tlle
图1晋径小车结构框图
1.2系统的核心部件 sPCE06lA芯片内部集成了IcE、FLAsH、sRAM、通
用I/0端口、定时器,计数器、中断控制、CPu时钟锁 相环、ADc、DAc输出、uART、s10、低电压监测,低 电压复位等模块【2-,l。sPcE06lA可以使外围电路大大简 化,节省小车内部的空间,并且凌阳单片机具有语音功 能。可以加入语音识别模块。
p8出c0删syBtem,tIle sofhare of 0_bstacle avoid町lce醐d
recog豳on觚d sdtware 0fv面ce
bIoadc8st.The nm state“the inteUectIlBl vehicles}Iows也at
tlle project which西ven in tlle tllesis is feasible.
本设计以凌阳单片机SPCE06lA为核心控制部件, 采用减速直流电机LSl7RU419i、电机驱动芯片L298N、红 外线光电传感器sTl78等为主要元件,以智能控制技术 为理论基础,通过程序利用sPcE061A的语音模块,根 据麦克风采集的语音信号与事先训练好的语音库的特征
语音进行对比,进行语音辨识并通过语音命令小车行 进、转向及倒库等操作。音控小车总体结构如图1所示。
GUO Na Na,HOU Yuan Bin,WANG Lei
(Dept.of ElectroIlic龃d Con砌,)【i’卸UIliVe璐ity ofScience and Technology,)(i’鲫710054,China)
Abst陋ct:A kind ofinteUigent vehicle is designed and made.Suplus 7s microcomputer SPCE06lA鸽the core control尹lortion,觚d direc卜
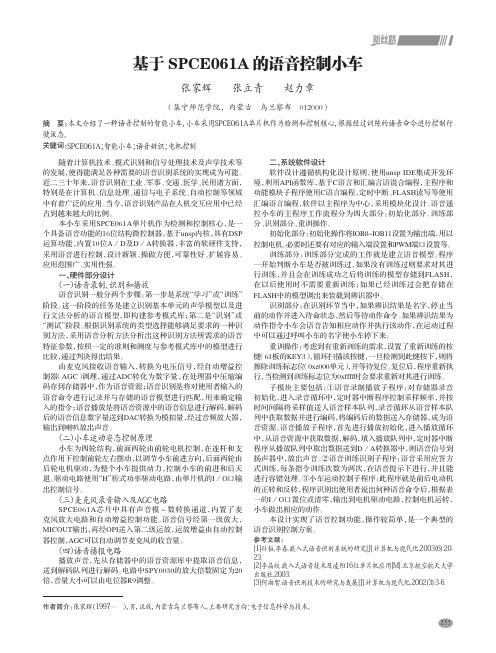
图4音控小车实物图
2系统的软件设计 2.1语音识别模块设计
小车的语音识别模块选用凌阳科技公司sPcE061A 开发板。SPcE06lA内嵌7通道10位电压A巾转换器(ADC) 和单通道声音A,D转换,声音A,D转换器输入通道内置 麦克风放大器和自动增益控制功能,其本身已经成为基 本的语音处理平台。本系统采用A2000模块,其语音压 缩编码率为24 kb,s,采样频率为16 kHzl·J。
(收稿日期:2009—02—25)
76
万方数据
《信息化纵横》2009年第14期
基于凌阳SPCE061A单片机的音控小车的设计
作者: 作者单位: 刊名:
英文刊名: 年,卷(期): 引用次数:
郭娜娜, 侯媛彬, 王磊, GUO Na Na, HOU Yuan Bin, WANG Lei 西安科技大学电控学院,陕西西安,710054
图6系统软件流程图
本文设计并制作的小车以凌阳单片机为控制核心。 完成了语音辨识功能,并在实现语音控制的基础上扩 展了SPCE06lAI,O接口,实现了紧急避障微调功能,能 够按照语音指令很好地完成前进、倒车、左转、右转以 及倒库。能够识别人的语音命令,并根据命令的含义执 行相应的动作。整个部分设计合理,小车运行正常。 参考文献 [1】COX I,BALNCHE J.An expenIlient in gudiance衄d伊avtiaiton of
74
万方数据
《信息化纵横》2009年第14期
…
e啊
应用奇葩 ExampIe Of App¨cation
1.3小车电机驱动设计 L298是SGs公司的产品,L298N为15个管角的单块集
成电路,高电压,高电流,四通道驱动,设计用【298N来 接收DTL或者1-I'L逻辑电平,驱动感性负载(比如继电器, 直流和步进马达)和开关电源晶体管。内部包含4通道逻 辑驱动电路,其额定工作电流为l A,最大可达1.5 A,Vss 电压最小4.5 v,最大可达36 V;Vs电压最大值也是36V。 L298N可直接对电机进行控制,无须隔离电路,可以驱动 双电机。根据L298N芯片的特点以及SPcE061A自身的特 点,把IOA4一10A7作为输出口,分别与L298N的INl一IN4 相接,其U、U。分别接+12 V、+5 V电源,其输出口OuTl— OUT2接转向电机,OUT3一OUT4接驱动电机,根据设计 要求,结合所编好的程序,根据所发语音命令,接收信 号,便可给[PjOA—DATA】传送数据,从而控制转向电机 和驱动电机。其连接图如图2所示。
硬件和智能控制软件,其中软件包括小车避障及路径控制软件、语音识别及播放软件。智能音控小
车的运行状态表明该设计方案是可行的。
关键词:语音识别;凌阳单片机;智能;传感器
中图分类号:TP368.2
文献标识码:A
Design of voice control Vemcle based on SPCE06 1A
表1行使状态控制表
行使状态
108
前进
l
倒车
0
左拐
l
右拐
l
109
IOlO
10ll
0
O
0
1
0
O
0
l
0
0
0
1
(2)训练部分:训练部分完成的工作就是建立语音 模型。程序一开始判断小车是否被训练过,如果没有训 练过则要求对其进行训练,整个训练过程共有5次,依 次为:名称一前进一倒车一左拐—右拐。在训练成功之 后将训练的模型存储到FLASH,在以后使用时不需要重
1.5系统硬件部分设计 音控小车主要由电机和电机驱动部分组成,电机有2
个分别用来控制后轮的驱动和前轮的转向,采用芯片 L298做为电机的驱动电路,可以驱动双电机。小车为4轮 结构,其中前面2个车轮由前轮电机控制,在连杆和支点 作用下控制前轮左右摆动,来调节小车的前进方向。在自 然状态下,前轮在弹簧作用下保持中间位置。后面2个车 轮由后轮电机驱动,为整个小车提供动力,所以又称前面 的轮子为方向轮,后面的两个轮子为驱动轮。利用直流减 速电机控制小车的驱动,可以不考虑调速,利用步进电机 控制小车的转向来提高小车的整体性能,具有很高的性 价比。供电电源选用3块4 V手机电池串联成12 V电源给 小车提供电能。车身装有5个传感器在不同方向用来进行 微调,防止撞壁。小车前进过程中当接收到语音命令时, 可执行行进、转向及倒库等操作。
本设计的主要目的是针对智能无人驾驶汽车设计出 智能音控小车,在智能化小车上实现语音控制,避免出现 许多大大小小的事故。本设计方案也可应用于移库倒库 过程中,而且在诸如智能建筑、公共便民设施、自动立体 车库等类似的人性化环境中也能够发挥其作用In。 1系统的总体设计方案及硬件设计 1.1系统的总体设计描述
新训练的按键(61板的KEY3),循环扫描该按键,一 旦检测到此键按下,则将擦除训练标志位(0xe000单 元),并等待复位。复位后,程序重新执行,当检测到
图5小车训练流程图
训练标志位为0xffff时会要求重新对其进行训练。小车 训练流程图如图5所示【5】。 2.2系统的软件设计流程图
系统的软件设计流程如图6所示。本设计采用c语 言和汇编语言联合编程的方法。其中,C语言作为主程 序编程,可以充分利用C语言的优点,调用其他程序模 块。汇编语言主要用在子程序的模块中,利用它的中 断、延时等方面的优点。汇编语言的主要优点是占用硬 件资源少、程序直接对硬件操作加快了处理速度。本设 计的所有程序均在凌阳单片机集成开发环境IDE中进 行。本系统的软件部分采用模块化程序结构,其软件设 计主要包括初始化、系统主程序、语音提示程序、小车 微调程序等部分。
本设计最终实现了对音控小车的设计,图4所示是 基于凌阳单片机语音控制小车的实物图,其具体结构 是1喇叭、2车轮、3凌阳单片机、4光电传感器、5电 池及驱动板、6电机。
图2电机驱动电路连接图 1.4车身微调装置