8255交通灯实验单片机程序
8255控制交通灯实验原理

8255控制交通灯实验原理我们需要了解交通灯的工作原理。
一般来说,交通灯是通过控制红、黄、绿三个灯的亮灭来指示交通的状态。
红灯表示停车,黄灯表示准备行车,绿灯表示可以行车。
交通灯的亮灭是通过控制电流的开关来实现的。
在实验中,我们将使用8255芯片的三个I/O端口来控制交通灯的红、黄、绿三个灯。
具体来说,我们将把红灯连接到8255芯片的一个I/O端口,黄灯连接到另一个I/O端口,绿灯连接到第三个I/O端口。
通过编程控制这三个I/O端口的输出电平,我们就可以控制交通灯的亮灭。
在编程方面,我们需要使用汇编语言来编写控制程序。
首先,我们需要初始化8255芯片的工作模式。
通过将控制字写入控制寄存器,我们可以将8255芯片设置为输出模式,同时设置输出的电平。
然后,我们需要编写一个循环程序,不断改变输出的电平,从而实现交通灯灯光的变换。
具体来说,我们可以通过改变红、黄、绿三个灯的输出电平的组合来控制交通灯的亮灭。
在实验中,我们可以通过按下开关来触发交通灯的变换。
当按下开关时,控制程序将会执行一次循环,改变交通灯的亮灭状态。
这样,我们就可以通过按下开关来模拟交通灯的工作过程。
通过这个实验,我们可以更好地理解8255芯片的工作原理,并且掌握使用8255芯片来控制外部设备的方法。
在实际应用中,我们可以利用8255芯片来控制各种外部设备,如LED灯、电机等。
这样,我们可以通过编程来实现对外部设备的控制,从而实现各种功能。
使用8255芯片来控制交通灯是一种简单而有效的方法。
通过编程控制8255芯片的输出电平,我们可以实现交通灯的亮灭变换。
这个实验不仅可以帮助我们更好地理解8255芯片的工作原理,还可以培养我们的编程能力。
希望通过这个实验,我们可以更好地掌握8255芯片的使用,为以后的学习和工作打下良好的基础。
单片机可编程8255接口实验报告

可编程8255接口实验报告㈠实验目的1.掌握可编程并行接口芯片的基本工作原理及其使用方,熟悉8255可编程并行I/O扩展接口。
2.掌握8255可编程并行I/O扩展接口方法,能够利用8255可编程并行接口芯片设计简单应用系统。
㈡实验器材1. G6W仿真器一台2. MCS-51实验板一台3. PC机一台4.电源一台㈢实验内容及要求1.声光报警器实验8255是可编程的通用并行输入输出扩展接口。
8255芯片的片选信号CS4 及口地址选择线AA0、AA1分别由8051的地址线提供。
8255的A口设置为输入数据端口,B口设置为输出数据端口,通过控制位操作控制字将C口某一位置位或复位,B口与发光二极管LED相连,C口与蜂鸣器相连,读取A 口数据,只要有一位为“1”,则点亮发光二极管LED(B口输出为低,LED 亮,反之,LED 灭),同时蜂鸣器响(若 C口某一位置1,蜂鸣器不响)。
2.交通灯控制实验通过并行接口8255实现十字路nb 口交通灯的模拟控制。
L6~L8与PC5~PC7相连,作为南北路口的交通灯,L1~L3与PC0~PC2相连,作为东西路口的交通等。
编程使六个灯按以下规律变化:南北路口的“绿”灯(L8)、东西路口的“红”灯(L1)同时亮30秒(要求有倒计时显示);南北路口的“黄”灯(L7)闪烁若干次,同时东西路口“红”灯(L1)继续亮;南北路口的“红”灯(L6)、东西路口的“绿”灯(L3)同时亮30秒(要求有倒计时显示);东西路口的“黄”灯(L2)闪烁若干次,南北路口的“红”灯(L6)继续亮;重复以上步骤。
㈣实验步骤1.连接8255芯片的片选信号CS4及口地址选择线AA0、AA1,并根据片选信号及口地址选择线确定8255的各I/O口地址和控制字寄存器的地址。
2.声光报警器实验的连线①8255的A口的8位根据需要接入高低电平。
②8255的B口中任一口与TEST相连,运行程序,即可观察L9发光二极管。
③在实验板上接入蜂鸣器,并且8255的PC7与BEEP相连,运行程序,即可听到蜂鸣器鸣响声。
单片机8255交通灯程序
交通灯程序/*********************************************************** 十字路口交通灯控制 C 程序***********************************************************/#include <reg51.h>#define uchar unsigned char#define uint unsigned int/*****定义控制位*******************************************/sbit Time_Show_LED2=P2^5; //Time_Show_LED2(直行时间显示)控制位sbit Time_Show_LED1=P2^4; //Time_Show_LED1(直行时间显示)控制位sbit EW_LED2=P2^3; //EW_LED2控制位sbit EW_LED1=P2^2; //EW_LED1控制位sbit SN_LED2=P2^1; //SN_LED2控制位sbit SN_LED1=P2^0; //SN_LED1控制位sbit SN_Yellow=P1^6; //SN黄灯sbit EW_Yellow=P1^2; //EW黄灯sbit EW_ManGreen=P3^0; //EW人行道绿灯sbit SN_ManGreen=P3^1; //SN人行道绿灯sbit Special_LED=P2^6; //交通特殊指示灯sbit Busy_LED=P2^7; //交通繁忙指示灯sbit Nomor_Button=P3^5; //交通正常按键sbit Busy_Btton=P3^6; //交通繁忙按键sbit Special_Btton=P3^7; //交通特殊按键sbit EW_ManRed=P3^3; //EW人行道红灯sbit SN_ManRed=P3^4; //SN人行道红灯bit Flag_SN_Yellow; //SN黄灯标志位bit Flag_EW_Yellow; //EW黄灯标志位char Time_EW; //东西方向倒计时单元char Time_SN; //南北方向倒计时单元uchar EW=60,SN=40,EWL=19,SNL=19; //程序初始化赋值,正常模式uchar EW1=60,SN1=40,EWL1=19,SNL1=19; //用于存放修改值的变量uchar codetable[10]={0x3F,0x06,0x5B,0x4F,0x66,0x6D,0x7D,0x07,0x7F,0x6F}; //0-9段选码uchar code S[8]={0x28,0x48,0x18,0x48,0x82,0x84,0x81,0x84};//交通信号灯控制代码/**********************延时子程序**************************/void Delay(uchar a){uchar i;i=a;while(i--){;}}/*****************显示子函数******************************/ void Display(void){uchar h,l;h=Time_EW/10;l=Time_EW%10;P0=table[l];EW_LED2=1; //点亮EW_LED2Delay(2);EW_LED2=0; //熄灭EW_LED2P0=table[h];EW_LED1=1; //点亮EW_LED1Delay(2);EW_LED1=0;h=Time_SN/10;l=Time_SN%10;P0=table[l];SN_LED2=1; //点亮SN_LED2Delay(2);SN_LED2=0;P0=table[h];SN_LED1=1; //点亮SN_LED1Delay(2);SN_LED1=0;h= EW1/10;l= EW1%10;P0=table[l];Time_Show_LED1=1; //点亮Time_Show_LED1Delay(2);Time_Show_LED1=0;P0=table[h];Time_Show_LED2=1; //点亮Time_Show_LED2Delay(2);Time_Show_LED2=0;}/**********************外部0中断服务程序******************/void INT0_srv(void)interrupt 0 using 1{EX0=0; //关中断if(Nomor_Button==0) //测试按键是否按下,按下为正常状态 {EW1=60;SN1=40;EWL1=19;SNL1=19;Busy_LED=0; //关繁忙信号灯Special_LED =0; //关特殊信号灯}if(Busy_Btton==0) //测试按键是否按下,按下为繁忙状态 {EW1=45;SN1=30;EWL1=14;SNL1=14;Special_LED=0; //关特殊信号灯Busy_LED=1; //开繁忙信号灯}if(Special_Btton==0)//测试按键是否按下,按下为特殊状态 {EW1=75;SN1=55;EWL1=19;SNL1=19;Busy_LED=0; //关繁忙信号灯Special_LED =1;//开特殊信号灯}EX0=1; //开中断}/**********************T0中断服务程序*******************/ void timer0(void)interrupt 1 using 1{static uchar count;TH0=(65536-50000)/256;TL0=(65536-50000)%256;count++;if(count==10){if(Flag_SN_Yellow==1) //测试南北黄灯标志位{SN_Yellow=~SN_Yellow;}if(Flag_EW_Yellow==1) //测试东西黄灯标志位{EW_Yellow=~EW_Yellow;}}if(count==20){Time_EW--;Time_SN--;if(Flag_SN_Yellow==1) //测试南北黄灯标志位{SN_Yellow=~SN_Yellow;}if(Flag_EW_Yellow==1) //测试东西黄灯标志位{EW_Yellow=~EW_Yellow;}count=0;}}/*********************主程序开始***********************/ void main(void){Busy_LED=0;Special_LED=0;IT0=1; //INT0负跳变触发TMOD=0x01; //定时器工作于方式1TH0=(65536-50000)/256; //定时器赋初值TL0=(65536-50000)%256;EA=1; //CPU开中断总允许ET0=1; //开定时中断EX0=1; //开外部INTO中断TR0=1; //启动定时while(1){/*******S0状态**********/SN_ManRed=0;SN_ManGreen=1; //SN人行道通行EW_ManRed=1; //EW人行道禁止EW_ManGreen=0;Flag_EW_Yellow=0; //EW关黄灯显示信号Time_EW=EW;Time_SN=SN;while(Time_SN>=5){P1=S[0]; //SN绿灯,EW红灯Display();}/*******S1状态**********/P1=0x00;while(Time_SN>=0){Flag_SN_Yellow=1; //SN开黄灯信号位P1=P1|0x08; //保持EW红灯Display();}/*******S2状态**********/SN_ManRed=1; //SN人行道禁止SN_ManGreen=0;EW_ManRed=1; //EW人行道禁止EW_ManGreen=0;Flag_SN_Yellow=0; //SN关黄灯显示信号Time_SN=SNL;while(Time_SN>=5){P1=S[2]; //SN左拐绿灯亮,EW红灯Display();}/*******S3状态**********/P1=0x00;while(Time_SN>=0){Flag_SN_Yellow=1; //SN开黄灯信号位P1=P1|0x08; //保持EW红灯Display();}/***********赋值*********/EW=EW1;SN=SN1;EWL=EWL1;SNL=SNL1;/*******S4状态**********/SN_ManRed=1; //SN人行道禁止SN_ManGreen=0;EW_ManRed=0;EW_ManGreen=1; //EW人行道通行Flag_SN_Yellow=0; //SN关黄灯显示信号Time_EW=SN;Time_SN=EW;while(Time_EW>=5){P1=S[4]; //EW通行,SN红灯Display();}/*******S5状态**********/P1=0X00;while(Time_EW>=0){Flag_EW_Yellow=1;//EW开黄灯信号位P1=P1|0x80; //保持SN红灯Display();}/*******S6状态**********/SN_ManRed=1; //SN人行道禁止SN_ManGreen=0;EW_ManRed=1; //EW人行道禁止EW_ManGreen=0;Flag_EW_Yellow=0;//EW关黄灯显示信号Time_EW=EWL;while(Time_EW>=5){P1=S[6]; //EW左拐绿灯亮,SN红灯Display();}/*******S7状态**********/P1=0X00;while(Time_EW>=0){Flag_EW_Yellow=1; //EN开黄灯信号位P1=P1|0x80; //保持SN红灯Display();}/***********赋值********/EW=EW1;SN=SN1;EWL=EWL1;SNL=SNL1;}}。
模拟交通灯实验报告
单片机综合实验报告题目: 模拟真实交通灯班级:姓名:学号:指导老师:时间:一、实验内容:用8255芯片的PA、PB口低四位做输出口,控制十二个发光二极管燃灭,模拟十字路口交通灯管理,并利用数码显示器进行倒计时显示(采用单片机内部定时器定时)。
通过外部中断能使交通灯暂停运行,并点亮4个红灯。
通过16*16点阵中的图形模拟控制行人过马路的人形“走”、“停”指示灯,可参考下图所示。
选做增加项目:在交通灯开始之前可通过开关对红绿灯亮灭时间的初始值进行增、减设定或者交通灯暂停时加上乐曲报警。
二、实验电路及功能说明电路:74LS138译码器电路8255与发光二极管连线图数码LED显示器电路(不需接线)16×16LED点阵显示电要求:交通灯亮灭过程同“8255控制交通灯实验”,倒计时显示只需两位数(0~99),用定时器定时进行倒计时,每秒钟减1。
在16*16点阵中显示的人形“走”、“停”标志可自定义,由专门软件可转换为相应显示代码,不需自己推理。
三、实验程序流程图:主程序:子程序:详细程序请参考程序清单。
四、实验结果分析对程序进行仿真可以观察到:点阵中交替显示如图(a)、(b)所示图像,且交替显示时间为30秒。
当显示图像为(a)时,表示可以容行人通过,限时30秒;当显示图像为(b)时,表示不容行人通过,也限时30秒。
如此,在十字路口各置一对点阵即可模拟实景。
五、心得体会通过此次实验,对单片机的I/O口的使用的条件有了更深的理解,对单片机的各个管脚功能的理解也加深了,以及在常用编程设计思路技巧的掌握方面也向前迈了一大步。
这次的课程设计让我把单片机的理论知识应用在实践中,实现了理论和实践相结合,从中更懂得理论是实践的基础,实践有助于检验理论的正确性的道理,对我以后参加工作或者继续学习深造将产生巨大的帮助和影响。
六、程序清单#include <reg51.h>#include <absacc.h>#define uchar unsigned char#define uint unsigned int#define ROW1 XBYTE[0XFFE3]#define ROW2 XBYTE[0XFFE0]#define COL1 XBYTE[0XFFE2]#define COL2 XBYTE[0XFFE1]#define PA XBYTE[0xffd8]#define PB XBYTE[0xffd9]#define CTL XBYTE[0xffdb]#define SEG XBYTE[0xffdc]#define BIT XBYTE[0xffdd]#define allredend 10#define ewredend 2*ewstarter+allredend#define snyellowend ewredend+10#define snredend snyellowend+2*snstarter#define ewyellowend snredend+10sbit KEY1=P1^0;sbit KEY2=P1^1;sbit KEY3=P1^2;sbit P32=P3^2;uchar tongBu;uchar code ewTable[]={0xb6,0x75,0xf3,0xf7,0xae,0x9e,0xbe};uchar code nsTable[]={0xd,0xd,0xc,0xd,0xb,0x7,0xf};//uchar tempa,tempb;int time=1,cnt,change,intflag,inttime=1,ewstarter=10,snstarter=15;int tempseg;uchar key1=0;uchar buffer[]={0,0,0,0,0,0};uchar table[]={0xC0,0xF9,0xA4,0xB0,0x99,0x92,0x82,0xF8,0x80,0x90,0xff};/*-- 行走--*//*-- 宽度x高度=16x16 --*/uchar code led1[]={0x01,0x80,0x02,0x40,0x02,0x40,0x01,0x80,0x03,0xC0,0x06,0x60,0x0A,0x50,0x0A,0x5 0,0x0B,0xD0,0x12,0x48,0x02,0x40,0x02,0x60,0x04,0x20,0x04,0x20,0x08,0x20,0x18,0x60};/*-- 停止--*//*-- 宽度x高度=16x16 --*/uchar code led2[]={0x01,0x80,0x02,0x40,0x02,0x40,0x01,0x80,0x07,0xE0,0x7E,0x7E,0x02,0x40,0x02,0x40 ,0x03,0xC0,0x01,0x80,0x01,0x80,0x01,0x80,0x01,0x80,0x01,0x80,0x01,0x80,0x03,0xC0};/*-- 文字: 高--*//*-- Fixedsys12; 此字体下对应的点阵为:宽x高=16x16 --uchar code led2[]={0x02,0x00,0x01,0x00,0xFF,0xFE,0x00,0x00,0x0F,0xE0,0x08,0x20,0x0F,0xE0,0x00,0x0 0,0x7F,0xFC,0x40,0x04,0x4F,0xE4,0x48,0x24,0x48,0x24,0x4F,0xE4,0x40,0x14,0x40,0x08};*/ void delayshort(){char n;for(n=50;n>0;n--);}uchar changeleft(uchar led){uchar temp;temp=0;temp|=(led<<7)&0x80;temp|=(led<<5)&0x40;temp|=(led<<3)&0x20;temp|=(led<<1)&0x10;temp|=(led>>1)&0x08;temp|=(led>>3)&0x04;temp|=(led>>5)&0x02;temp|=(led>>7)&0x01;return(temp);}void led16_16display(uchar *table,uchar length){uchar i=length/2,scan1=0x1,scan2=0x1;for(i=0;i<16;i++){if(i<8){ROW1=0;ROW2=0;COL1=scan1;COL2=0;ROW1=changeleft(table[2*i]);ROW2=table[2*i+1];COL1=scan1;COL2=0;delayshort();scan1<<=1;}else{ROW1=0;ROW2=0;COL1=0;COL2=scan2;ROW1=changeleft(table[2*i]);ROW2=table[2*i+1];COL1=0;COL2=scan2;delayshort();scan2<<=1;}}}void changeseg(){if(key1==0){buffer[3]=10;buffer[0]=10;buffer[5]=tempseg%10;buffer[4]=tempseg/10;buffer[2]=tempseg%10;buffer[1]=tempseg/10;}else if(key1==1){buffer[3]=10;buffer[0]=10;buffer[5]=ewstarter%10;buffer[4]=ewstarter/10;buffer[2]=ewstarter%10;buffer[1]=ewstarter/10;}else{buffer[3]=10;buffer[0]=10;buffer[5]=snstarter%10;buffer[4]=snstarter/10;buffer[2]=snstarter%10;buffer[1]=snstarter/10;}}void timer1()interrupt 3{static uchar temp=0x20,cnt1;TH1=(65536-1000)/256;TL1=(65536-1000)%256;changeseg();SEG=0xff;SEG=table[buffer[cnt1]];cnt1++;if(cnt1==6)cnt1=0;BIT=temp;temp>>=1;if(temp==0)temp=0x20;}void int_0()interrupt 0{delayshort();if(P32==0){PA=0xB6;PB=0xd;PT0=1;PT1=1;intflag=1;while(inttime<=20)led16_16display(led2,32);inttime=1;intflag=0;PT0=0;PT1=0;PA=ewTable[tongBu];PB=nsTable[tongBu];}}void timer0()interrupt 1{TH0=(65536-50000)/256;TL0=(65536-50000)%256;cnt++;if(cnt==5){cnt=0;if(intflag==1){inttime++;tempseg=10-inttime/2;}else{time++;if(time<=allredend){tongBu=0;PA=ewTable[tongBu];PB=nsTable[tongBu];tempseg=allredend/2-(time+1)/2;}else if((time>allredend)&&(time<=ewredend)){tongBu=1;PA=ewTable[tongBu];PB=nsTable[tongBu];tempseg=ewstarter+allredend/2-(time+1)/2;}else if((time>ewredend)&&(time<=snyellowend)){if(change==0){tongBu=2;PA=ewTable[tongBu];PB=nsTable[tongBu];change=1;}else{tongBu=3;PA=ewTable[tongBu];PB=nsTable[tongBu];change=0;}tempseg=ewstarter+allredend/2+5-(time+1)/2;}else if((time>snyellowend)&&(time<=snredend)){tongBu=4;PA=ewTable[tongBu];PB=nsTable[tongBu];tempseg=ewstarter+allredend/2+5+snstarter-(time+1)/2;}else if((time>snredend)&&(time<=ewyellowend)){if(change==0){tongBu=5;PA=ewTable[tongBu];PB=nsTable[tongBu];change=1;}else{tongBu=6;PA=ewTable[tongBu];PB=nsTable[tongBu];change=0;}tempseg=ewstarter+10+allredend/2+snstarter-(time+1)/2;}else{tongBu=1;time=allredend+1;PA=ewTable[tongBu];PB=nsTable[tongBu];tempseg=ewstarter+allredend/2-(time+1)/2;}}}}void key(){uchar keynum;keynum=~(P1|0XF8);switch(keynum){case 0x1:while(KEY1==0)led16_16display(led2,32);key1++;TR0=0;if(key1==3){key1=0;TR0=1;}break;case 0x2:while(KEY2==0)led16_16display(led2,32);if(key1==1){ewstarter++;if(ewstarter==100)ewstarter=0;}if(key1==2){snstarter++;if(snstarter==100)snstarter=0;}break;case 0x4:while(KEY3==0)led16_16display(led2,32);if(key1==1){ewstarter--;if(ewstarter==-1)ewstarter=99;}if(key1==2){snstarter--;if(snstarter==-1)snstarter=99;}break;default:break;}}void main(){IE=0x8b;IT0=1;TMOD=0x11;TH0=(65536-50000)/256;TL0=(65536-50000)%256;TH1=(65536-1000)/256;TL1=(65536-1000)%256;CTL=0x80;tongBu=0;TR1=1;PA=ewTable[tongBu];PB=nsTable[tongBu];tempseg=allredend/2-(time+1)/2;TR0=1;while(1){key();if(intflag==0){if(key1==0){if(time<=allredend)led16_16display(led2,32);else if(time>allredend&&time<=snyellowend)led16_16display(led1,32);else if(time>snyellowend&&time<=ewyellowend)led16_16display(led2,32);}elseled16_16display(led2,32);}}}。
单片机交通灯实验代码
;======================P1口亮灯实验========================= ORG 0790H;----------------------------------------------------------SE18: MOV P1,#0FFH ;送P1口LO34: MOV A,#0FEH ;L1发光二极管点亮LO33: MOV P1,ALCALL SE19 ;延时RL A ;左移位SJMP LO33 ;循环;----------------------------------------------------------SE19: MOV R6,#0A0HLO36: MOV R7,#0FFHLO35: DJNZ R7,LO35DJNZ R6,LO36 ;延时RET;----------------------------------------------------------END;==================== 8255控制交通灯========================== ORG 0BB0HJOD0: MOV SP,#60HMOV DPTR,#0FFDBHMOV A,#88HMOVX @DPTR,A ;8255初始化MOV DPTR,#0FFD8HMOV A,#0B6HMOVX @DPTR,AINC DPTRMOV A,#0DHMOVX @DPTR,A ;点亮4个红灯MOV R2,#25H ;延时LCALL DEL YJOD3: MOV DPTR,#0FFD8HMOV A,#75HMOVX @DPTR,AINC DPTRMOV A,#0DHMOVX @DPTR,A ;东西绿灯亮,南北红灯亮MOV R2,#55HLCALL DEL Y ;延时MOV R7,#05H ;闪烁次数JOD1: MOV DPTR,#0FFD8HMOV A,#0F3HMOVX @DPTR,AINC DPTRMOV A,#0CHMOVX @DPTR,A ;东西黄灯亮,南北红灯亮MOV R2,#20HLCALL DEL Y ;延时MOV DPTR,#0FFD8HMOV A,#0F7HMOVX @DPTR,AINC DPTRMOV A,#0DHMOVX @DPTR,A ;南北红灯亮MOV R2,#20HLCALL DEL Y ;延时DJNZ R7,JOD1 ;闪烁次数未到继续MOV DPTR,#0FFD8HMOV A,#0AEHMOVX @DPTR,AINC DPTRMOV A,#0BHMOVX @DPTR,A ;东西红灯亮,南北绿灯亮MOV R2,#55HLCALL DEL Y ;延时MOV R7,#05H ;闪烁次数JOD2: MOV DPTR,#0FFD8HMOV A,#9EHMOVX @DPTR,AINC DPTRMOV A,#07HMOVX @DPTR,A ;东西红灯亮,南北黄灯亮MOV R2,#20HLCALL DEL Y ;延时MOV DPTR,#0FFD8HMOV A,#0BEHMOVX @DPTR,AINC DPTRMOV A,#0FHMOVX @DPTR,A ;东西红灯亮MOV R2,#20HLCALL DEL Y ;延时DJNZ R7,JOD2 ;闪烁次数未到继续LJMP JOD3 ;循环;---------------------------------------------DELY: PUSH 02HDEL2: PUSH 02HDEL3: PUSH 02H ;延时DEL4: DJNZ R2,DEL4POP 02HDJNZ R2,DEL3POP 02HDJNZ R2,DEL2POP 02HDJNZ R2,DEL YRET;---------------------------------------------END;===================== 工业顺序控制======================== ORG 0000HLJMP PO10ORG 0013HLJMP PO16;----------------------------ORG 0190HPO10: MOV P1,#7FHORL P3,#00HPO11: JNB P3.4,PO11 ;开工吗?ORL IE,#84HORL IP,#01HMOV PSW,#00H ;初始化MOV SP,#53HPO12: MOV P1,#7EH ;第一道工序ACALL PO1BMOV P1,#7DH ;第二道工序ACALL PO1BMOV P1,#7BH ;第三道工序ACALL PO1BMOV P1,#77H ;第四道工序ACALL PO1BMOV P1,#6FH ;第五道工序ACALL PO1BMOV P1,#5FH ;第六道工序ACALL PO1BMOV P1,#0FH ;第七道工序ACALL PO1BSJMP PO12;----------------------------PO16: MOV B,R2 ;保护现场PO17: MOV P1,#7FH ;关输出MOV 20H,#0A0H ;振荡次数PO18: SETB P1.7 ;振荡ACALL PO1A ;延时CLR P1.7 ;停振ACALL PO1A ;延时DJNZ 20H,PO18 ;不为0转CLR P1.7ACALL PO1A ;停振JNB P3.3,PO17 ;故障消除吗?MOV R2,B ;恢复现场RETIPO1A: MOV R2,#06HACALL DEL Y ;延时RETPO1B: MOV R2,#30HACALL DEL Y ;延时RET;----------------------------DELY: PUSH 02HDEL2: PUSH 02HDEL3: PUSH 02H ;延时DEL4: DJNZ R2,DEL4POP 02HDJNZ R2,DEL3POP 02HDJNZ R2,DEL2POP 02HDJNZ R2,DEL YRET;----------------------------END;=================== A/D转换实验======================== ORG 05A0HSE11: MOV SP,#53HMOV 7EH,#00HMOV 7DH,#08HMOV 7CH,#00HMOV 7BH,#09HMOV 7AH,#10HMOV 79H,#10H ;显示缓冲区初值LO18: CALL DIS ;显示MOV A,#00HMOV DPTR,#0FFE0HMOVX @DPTR,A ;0809的0通道采样CALL DIS ;SSEEMOVX A,@DPTR ;取出采样值mov dptr,#0ffe4h ;new add --> 138 Y1cpl a ;new addmovx @dptr,a ;new add --> 驱动发光二极管cpl a ;new addMOV R0,#79HCALL PTDS ;采样值送显示缓冲区SJMP LO18 ;循环;---------------------------PTDS: MOV R1,A ;拆送显示缓冲区ACALL PTDS1MOV A,R1SW AP APTDS1: ANL A,#0FHMOV @R0,AINC R0RET;---------------------------DIS: PUSH DPHPUSH DPLSETB RS1MOV R0,#7EHMOV R2,#20HMOV R3,#00HMOV DPTR,#LS0LS2: MOV A,@R0MOVC A,@A+DPTRMOV R1,#0DCHMOVX @R1,AMOV A,R2inc R1MOVX @R1,ALS1: DJNZ R3,LS1CLR CRRC AMOV R2,ADEC R0JNZ LS2movx @r0,adec r0cpl amovx @r0,aCLR RS1POP DPLPOP DPHRET;-------------------------------------LS0: DB 0C0H,0F9H,0A4H,0B0H,99H,92HDB 82H,0F8H,80H,90H,88H,83H,0C6HDB 0A1H,86H,8EH,0FFH,0CH,89H,7FH,0BFH;--------------------------------------END===================== D/A输出方波=========================;注意:进行本实验前,请先装载运行D/A 0V输出(调基准电压)程序Asm51\da_0v.asm ;使D/A输出端“AOUT”输出电压为0V,再进行本实验。
单片机控制交通灯程序代码
单片机控制交通灯程序代码第一篇:单片机控制交通灯程序代码毕业设计程序源代码ORG 0000H;主程序的入口地址LJMP MAIN;跳转到主程序的开始处ORG 0003H;外部中断0的中断程序入口地址ORG 000BH;定时器0的中断程序入口地址LJMP T0_INT;跳转到中断服务程序处ORG 0013H;外部中断1的中断程序入口地址MAIN : MOV SP,#50HMOV IE,#8EH;CPU开中断,允许T0中断,T1中断和外部中断1中断MOV TMOD,#51H;设置T1为计数方式,T0为定时方式,且都工作于模式1 MOV TH1,#00H;T1计数器清零MOV TL1,#00HSETB TR1;启动T1计时器SETB EX1;允许INT1中断SETB IT1;选择边沿触发方式MOV DPTR ,#0003HMOV A, #80H;给8255赋初值,8255工作于方式0MOVX @DPTR, A AGAIN: JB P3.1,N0;判断是否要设定东西方向红绿灯时间的初值,若P3.1为1 则跳转MOV A,P1JB P1.7,RED;判断P1.7是否为1,若为1则设定红灯时间,否则设定绿灯时间MOV R0,#00H;R0清零MOV R0,A;存入东西方向绿灯初始时间MOV R3,ALCALL DISP1LCALL DELAYAJMP AGAIN RED:MOV A,P1ANL A,#7FH;P1.7置0MOV R7,#00H;R7清零MOV R7,A;存入东西方向红灯初始时间MOV R3,ALCALL DISP1LCALL DELAYAJMP AGAIN毕业设计;------------N0:SETB TR0;启动T0计时器MOV 76H,R7;红灯时间存入76H N00:MOV A,76H;东西方向禁止,南北方向通行MOV R3,AMOV DPTR,#0000H;置8255A口,东西方向红灯亮,南北方向绿灯亮MOV A,#0DDHMOVX @DPTR, A N01:JB P2.0,B0 N02:SETB P3.0CJNE R3,#00H,N01;比较R3中的值是否为0,不为0转到当前指令处执行;------黄灯闪烁5秒程序------N1:SETB P3.0MOV R3,#05HMOV DPTR,#0000H;置8255A口,东西,南北方向黄灯亮MOV A,#0D4HMOVX @DPTR,A N11:MOV R4,#00H N12:CJNE R4,#7DH,$;黄灯持续亮0.5秒N13:MOV DPTR,#0000H;置8255A口,南北方向黄灯灭MOV A,#0DDHMOVX @DPTR,A N14:MOV R4,#00HCJNE R4,#7DH,$;黄灯持续灭0.5秒CJNE R3,#00H,N1;闪烁时间达5秒则退出;-----------------------------N2:MOV R7,#00HMOV A,R0;东西通行,南北禁止MOV R3,AMOV DPTR,#0000H;置8255A口,东西方向绿灯亮,南北方向红灯亮MOV A,#0EBHMOVX @DPTR,A N21:JB P2.0,T03N22:CJNE R3,#00H,N21;------黄灯闪烁5秒程序------N3:MOV R3,#05HMOV DPTR,#0000H;置8255A口,东西,南北方向黄灯亮毕业设计MOV A,#0E2HMOVX @DPTR,A N31:MOV R4,#00HCJNE R4,#7DH,$;黄灯持续亮0.5秒N32:MOV DPTR,#0000H;置8255A口,南北方向黄灯灭MOV A,#0EBHMOVX @DPTR,A N33:MOV R4,#00HCJNE R4,#7DH,$;黄灯持续灭0.5秒CJNE R3,#00H,N3;闪烁时间达5秒则退出SJMP N00;------闯红灯报警程序------B0:MOV R2,#03H;报警持续时间3秒 B01:MOV A,R3JZ N1;若倒计时完毕,不再报警CLR P3.0;报警CJNE R2,#00H,B01;判断3秒是否结束SJMP N02;------1秒延时子程序-------N7:RETI T0_INT:MOV TL0,#9AH;给定时器T0送定时10ms的初值MOV TH0,#0F1HINC R4INC R5CJNE R5,#0FAH,T01;判断延时是否够一秒,不够则调用显示子程序MOV R5,#00H;R5清零DEC R3;倒计时初值减一DEC R2;报警初值减一 T01:ACALL DISP;调用显示子程序RETI;中断返回;------显示子程序------DISP: JNB P2.4,T02 DISP1:MOV B,#0AHMOV A,R3;R3中值二转十显示转换DIV ABMOV 79H,AMOV 7AH,B DIS:MOV A,79H;显示十位毕业设计MOV DPTR,#TABMOVC A,@A+DPTRMOV DPTR,#0002HMOVX @DPTR,AMOV DPTR,#0001HMOV A,#0F7HMOVX @DPTR,ALCALL DELAY DS2:MOV A,7AH;显示个位MOV DPTR,#TABMOVC A,@A+DPTRMOV DPTR,#0002HMOVX @DPTR,AMOV DPTR,#0001HMOV A,#0FBHMOVX @DPTR,ARET;------东西方向车流量检测程序------T03: MOV A,R3SUBB A,#00H;若绿灯倒计时完毕,不再检测车流量JZN3JB P2.0,T03INC R7CJNE R7,#64H,E1MOV R7,#00H;中断到100次则清零 E1:SJMP N22;------东西方向车流量显示程序------T02: MOV B,#0AH MOVA,R7;R7中值二转十显示转换DIV ABMOV 79H,AMOV 7AH,B DIS3: MOV A,79H;显示十位MOV DPTR,#TABMOVC A,@A+DPTRMOV DPTR,#0002HMOVX @DPTR,AMOV DPTR,#0001H毕业设计MOV A,#0F7HMOVX @DPTR,ALCALL DELAY DS4:MOV A,7AH;显示个位MOV DPTR,#TABMOVC A,@A+DPTRMOV DPTR,#0002HMOVX @DPTR,AMOV DPTR,#0001HMOV A,#0FBHMOVX @DPTR,ALJMP N7;------延时4MS子程序----------DELAY: MOV R1,#0AH LOOP: MOV R6,#64HNOP LOOP1: DJNZ R6,LOOP1DJNZ R1,LOOPRET;------字符表------TAB:DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FHEND第二篇:单片机实现交通灯控制智能交通灯设计与实现基于单片机的智能交通灯控制系统的设计与实现,系统能够根据十字路口双车道车流量的情况控制交通讯号灯按特定的规律变化。
8255控制交通灯

专业:机电一体化班级:机电姓名:学号:设计题目:8255控制交通灯设计条件:了解8255芯片的结构及编程方法,学习模拟交通灯控制的实现方法。
用8255做输出口,控制十二个发光二极管燃灭,模拟交通灯管理。
功能说明:假设一个十字路口为东西南北走向。
交通灯的变化情况和规律如下,初始状态0为东西红灯,南北红灯。
然后转状态1东西绿灯通车,南北红灯。
过一段时间转状态2,东西绿灯灭,黄灯闪烁几次,南北仍然红灯。
再转状态3,南北绿灯通车,东西红灯。
过一段时间转状态4,南北绿灯灭,闪几次黄灯,延时几秒,东西仍然红灯。
最后循环至状态1。
设计任务:使用单片机作为控制器来模拟交通灯控制。
具体采用8255芯片做为输出口,控制十二个发光二极管燃灭,模拟交通灯管理。
要求掌握单片机的结构和功能,学会较简单单片机系统的硬件设计,并能通过汇编语言进行软件编程,完成要求的功能,同时熟练掌握8255A芯片的结构及使用。
设计报告内容包括:1)系统设计方案2)硬件电路图及硬件电路功能说明3)软件实现方法及程序流程图4)源程序及调试结果摘要自从交通灯诞生以来,其内部的电路控制系统就不断地被改进,设计方法也多种多样,从而使交通灯显得更加智能化。
由于单片机本身具有通讯联网功能,将同一条道路上的信号灯组成一局域网进行统一调度管理,可缩短车辆通行等候时间,实现科学化管理。
论文提出了一种涉及单片机的无人智能交通灯管理系统的控制方案,鉴于时间及所学知识所限,文中仅对系统中的一个节点____一个十字路口交通灯的管理进行了具体实现。
以8751芯片作为主控制器,可编程并行接口芯片8255作为扩展输出口,通过十二个发光二极管来模拟进行交通灯的燃灭管理,并详细阐述了其工作原理、基本功能框图、关键设计技术及软件工作流程,对选用芯片的特点进行了分析,并最后进行了软件实现,达到了系统要求的功能。
目录第一章绪论 (1)1.1 单片机在电子产品中的应用 (1)1.2 课题背景及设计思想 (2)第二章系统控制要求 (4)第三章交通灯总体设计方案 (5)3.1 总体设计思路 (5)3.2 设计框图 (5)第四章硬件设计 (7)4.1 主控芯片8751 (7)4.2 扩展并行I/O口8255 (10)4.3 数据缓冲器器芯片74LS244 (12)4.4 时钟振荡电路 (12)第五章软件设计 (14)5.1 交通信号灯控制流程图 (14)5.2 控制程序 (15)第六章结论 (18)参考文献 (19)致谢 (20)附:硬件电路图 (21)第一章绪论1.1 单片机在电子产品中的应用单片机又称微控制器MCU(MicroController Unit),由于用它可以很容易地将计算机嵌入到各种仪器和现场控制设备中,因此单片机也叫嵌入式微控制器(Embedded MCU)。
8255控制交通灯实验

井合肥禽院HEFEI UNIVERSITY计算机科学与技术系实验报告专业名称计算机科学与技术 _____________课程名称微型计算机原理及接口技术项目名称8255控制交通灯实验 ___________班级________________学号____________姓名_____________________同组人员__无 __________________________ 实验日期2016.12.21、实验目的与要求:(简述本次实验要求达到的目的,涉及到的相关知识点,实验的具体要求。
)1、了解8255 芯片的工作原理,熟悉其初始化编程方法以及输入、输出程序设计技巧。
学会使用8255 并行接口芯片实现各种控制功能,如本实验(控制交通灯)等。
2、熟悉8255内部结构和与8088的接口逻辑,熟悉8255芯片的3 种工作方式以及控制字格式。
3、认真预习本节实验内容,尝试自行编写程序,填写实验报告。
二、实验内容(根据本次实验项目的具体任务和要求,完成相关内容,可包括:实验目的、算法原理、实验仪器、设备选型及连线图、算法描述或流程图、源代码、实验运行步骤、关键技术分析、测试数据与实验结果、其他)实验内容:1、编写程序,使用的8255的PA0..2 , PA4..6控制LED旨示灯,实现交通灯功能。
2、连接线路验证8255的功能,熟悉它的使用方法。
实验原理:8255A是可编程的通用并行输入/输出接口芯片,因通用性强,使用灵活,可直接与CPU 总线相连,应用非常广泛。
8255A芯片内部有3个8为的输入/输出端口,即A 口,B 口和C 口。
从内部控制的角度来讲,可分为两组:A 组合B 组。
A组控制模块管理A 口和C 口的高四位(PC7~PC), B组控制模块管理B 口和C 口的低四位(PC3~PC)红灯(RLED,黄灯(YLEDD和绿灯(GLED分别接在8255的A,B,C 口的低四位端口,PAQ PA1, PA2 PA3分别接1, 2, 3, 4 (南东北西)路口的红灯,B,C 口类推。
交通灯控制程序8255
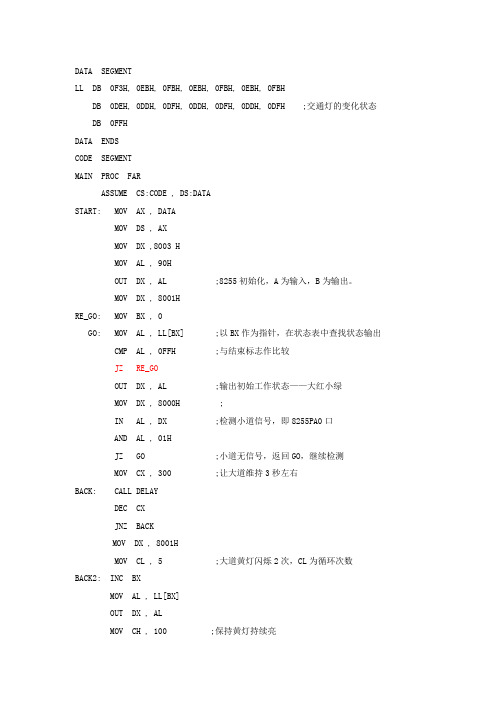
DATA SEGMENTLL DB 0F3H, 0EBH, 0FBH, 0EBH, 0FBH, 0EBH, 0FBHDB 0DEH, 0DDH, 0DFH, 0DDH, 0DFH, 0DDH, 0DFH ;交通灯的变化状态DB 0FFHDATA ENDSCODE SEGMENTMAIN PROC FARASSUME CS:CODE , DS:DATASTART: MOV AX , DATAMOV DS , AXMOV DX ,8003 HMOV AL , 90HOUT DX , AL ;8255初始化,A为输入,B为输出。
MOV DX , 8001HRE_GO: MOV BX , 0GO: MOV AL , LL[BX] ;以BX作为指针,在状态表中查找状态输出 CMP AL , 0FFH ;与结束标志作比较JZ RE_GOOUT DX , AL ;输出初始工作状态——大红小绿MOV DX , 8000H ;IN AL , DX ;检测小道信号,即8255PA0口AND AL , 01HJZ GO ;小道无信号,返回GO,继续检测 MOV CX , 300 ;让大道维持3秒左右BACK: CALL DELAYDEC CXJNZ BACKMOV DX , 8001HMOV CL , 5 ;大道黄灯闪烁2次,CL为循环次数BACK2: INC BXMOV AL , LL[BX]OUT DX , ALMOV CH , 100 ;保持黄灯持续亮DEC CHJNZ BBDEC CLJNZ BACK2MOV CX , 1000 ;加入10秒左右的延迟BACK3: CALL DELAYMOV DX , 8000HIN AL , DXAND AL , 00000010B ;检测大道信号,即8255PA1口JNZ NEXTDEC CXJNZ BACK3NEXT: MOV CL , 5 ;大道到来3辆车,进入黄灯闪灭状态 MOV DX , 8001HBACK4: INC BXMOV AL , LL[BX]OUT DX , ALMOV CH , 255 ;转换状态,变为大绿小红CC: CALL DELAYDEC CHJNZ CCDEC CLJNZ BACK4JMP RE_GO ;重新GO,完成交通灯的循环MAIN ENDPDELAY PROCMOV SI , 2000HDE1: MOV DI , 9000HDE0: DEC DIJNZ DE0DEC SIJNZ DE1 ;通过双次循环完成延迟MOV AH , 06HMOV DL , 0FFHINT 21H ;调用系统功能,键盘输入给ALPOP DXJZ CON ;判断有无键盘输入,无则返回主程序 MOV DX , 8001HMOV AL , 0FFHOUT DX , AL ;若因意外退出,将全部路口置为红灯EXIT: MOV AH , 4CHINT 21H ;返回DOSCON: RETDELAY ENDPCODE ENDSEND START。
利用51单片机实现交通红绿灯讲解
END
谢谢大家!
MOV A,#0B6H
MOVX @DPTR,A ;从A口输出数据0B6H,来控制相应二极管发光
INC DPTR
MOV A,#0DH
MOVX @DPTR,A ;从B口输出数据0DH,来控制相应二极管发光
北
西
南
东
黄绿红 110
黄绿红 110
黄绿红 黄绿红 110 11 0
B口低4位(ODH)
;允许定时器1中断
SEYB TR1
;打开定时器1
SJMP $
SER: MOV TH1,#3CH
MOV TL1,#0B0H ;定时器重装初值
DJNZ R1,NO ;循环定时(20H)次
MOV R1,20H
DJNZ R2,NO ;循环定时(21H)次
MOV R2,21H
RET
NO: RETI
MOV 20H,#0AH
MOV 21H,#01H
LCALL DELY
;延时0.5s
MOV DPTR,#0FF7CH
MOV A,#0BEH
MOVX @DPTR,A
INC DPTR
MOV A,#0FH
MOVX @DPTR,A
;东西红灯亮
MOV 20H,#0AH
MOV 21H,#01H
LCALL DELY
MOVX @DPTR,A
;南北红灯亮
MOV 20H,#0AH
MOV 21H,01H
LCALL DELY
;延时0.5s
DJNZ R7,JOD1
;闪烁次数未到继续
交通灯控制实验(8255)
实验二
交通灯控制实验(8255) 交通灯控制实验(8255)
一、实验目的
掌握8255方式0的工作原理及使用方法。 掌握8255方式0的工作原理及使用方法。 8255方式
二、实验内容
微机接口实验
实验二
交通灯控制实验(8255) 交通灯控制实验(8255)
一、实验目的 掌握8255方式0的工作原理及使用方法。 掌握8255方式0的工作原理及使用方法。 8255方式 二、实验内容 通过并行接口8255 通过并行接口8255实现十字路口交通 8255实现十字路口交通 灯的模拟控制。如图,L7、L6、L5作为南 灯的模拟控制。如图,L7、L6、L5作为南 北路口的交通灯与PC7 PC6、PC5相连 PC7、 相连, 北路口的交通灯与PC7、PC6、PC5相连, L2、L1、L0作为东西路口的交通灯与 作为东西路口的交通灯与PC2 L2、L1、L0作为东西路口的交通灯与PC2 PC1、PC0相连 相连。 、PC1、PC0相连。编程使六个灯按交通灯 变化规律燃灭。 变化规律燃灭。
交通灯控制
二、实验内容
通过并行接口8255 通过并行接口8255实现十字路口交通 8255实现十字路口交通 灯的模拟控制。 L7、L6、L5作为 灯的模拟控制。如下图,L7、L6、L5作为 南北路口的交通灯与PC7 PC6、PC5相连 PC7、 南北路口的交通灯与PC7、PC6、PC5相连 L2、L1、L0作为东西路口的交通灯与 ,L2、L1、L0作为东西路口的交通灯与 PC2、PC1、PC0相连 相连。 PC2、PC1、PC0相连。编程使六个灯按交 通灯变化规律燃灭。 通灯变化规律燃灭。
交通灯控制
三、实验电路
8255 地址: 地址:
控制寄存器: 控制寄存器: C口地址: 口地址: 28BH 28BH 288H 288H
8255交通灯试验报告

实验三 8255控制交通灯实验一、本实验所编写程序二、实验流程图D034D133D232D331D430D529D628D727PA04PA13PA22PA31PA440PA539PA638PA737PB018PB119PB220PB321PB422PB523PB624PB725PC014PC115PC216PC317PC413PC512PC611PC710RD 5WR 36A09A18RESET 35CS68255U36D0D1D2D3D4D5D6D7WRRD RSTA0A1PC5PC6PC7PC2PC3PC4PC0PC1DS35DS36DS37DS38DS39DS40DS4112345678VCCDS42A0A1CSCS1(0F000H)510R111510R112510R113510R114510R115510R116510R117510R118四、调试与总结1.调试(1)焊接时注意各个器件的引脚处,注意区分各个电阻与电容的数值要仔细看清楚,每一个器件都要尽量贴近印制板,最后,要用万用表测试一下,检查有没有短路的的地方。
(2)在设计电路时为节省引线数目利用P1.3作为电源驱动led但是这样驱动的led 亮度有限尤其是绿灯几乎不亮,所以测了一下高电平下的P1.3得知为2V左右所以改为5V 电源。
(3)在编写延时程序时尤其当延时常数太大时仿真时程序易错,所以使用定时器定时中断的方法,然后对定时计数以次延时。
2.总结通过本次课程设计较系统地掌握有关单片机控制的设计思想和设计方法,主要对AT89C5的结构、功能、内部资源等了解并对其进行测试和加以应用的知识得到学习。
这个设计的一些内容是在网上找的,自己做了一些的改动,在上网找资料的同时也学到了许多东西,找到了很多学习单片机的网站,里面的内容都比较适合我们初学者去学,有些网站还专门介绍这种单片机的类型、用法、功能等等。
其实我们平时不懂就应该自己去学习去弄明白,通过这个课程设计,使我发现,原来小小的一片单片机有这么强大的功能,能应用于各种领域。
8255交通灯控制设计

三、设计提示 1、十字路口交通灯的变化规律要求 (1)南北路口的绿灯,东西路口的红灯同时亮30秒左右。 (2)南北路口的黄灯闪烁若干次,同时东西路口红灯继续亮。 (3)南北路口的红灯,东西路口的绿灯同时亮30秒左右。 (4)南北路口的红灯继续亮,同时东西路口的黄灯闪烁若干次。 (5)转(1)重复。 2、清楚每个端口的输入输出操作、工作方式等正确书写控制 字。 四、实验重点或难点 1、熟悉8255并行接口芯片的数据传输特点。 2、掌握8255的控制字的定义。 3、掌握8255的接线方法,并学会如何控制端口数据的传行接口芯片8255的使用与硬件接口的方法 2、掌握通过8255A并行接口传送数据的方法,以控制LED发 光二极管的燃灭,实现十字路口交通灯模拟控制 二、实验内容 1、要完成本实验,首先必须了解交通路灯的亮灭规律;程序 中应设定好8255的工作模式,使三个端口均工作于方式0,并处 于输出状态。 2、用8255的A端口或C端口控制6个发光二极管,交通灯用两 组红、黄、绿发光二极管代表;分别作为南北路口的交通灯和 东西路口的交通灯;以摸拟交通灯管理。编程使六个灯按交通 灯变化规律燃灭。