二维微动精密工作台
二维步进单片机控制工作台控制系统设计
摘要如今,由于工作台操作简单,精度高,能够满足一般生产需求。
正因为如此,所以它广泛应。
本文主要研究的是两维步进单片机控制工作台的控制部分。
主要的任务就是用单片机实现两个步进电机的正反转和速度的控制。
本控制系统可以由键盘输入运行的步数,由LED 管显示,信号经单片机转换,采用软件对信号进行环形分配,利用光电隔离器进行光电隔离,经功率放大器进行信号的放大,用放大的信号来驱动步进电机的运行。
由各个功能键控制系统的运行,按启动键后,步进电机按照输入的步数进行走步;如在运行期间按停止键,则步进电机停止运行。
工作台的两头都有行程开关,如果超出了极限位置,行程开关闭合,步进电机停止转动,并且蜂鸣器报警。
关键词:工作台;步进电机;单片机AbstractNowadays, The workbench is easy to operate, the precision is high, and it can meet the generally production demand . Just because of this,so it is widely used.Main research of this paper is that the part of control of the two-dimension stepping single-chip microcomputer control workbench. The main task is to realize two stepping motor’s rotating positive and negatively and control of pace with single-chip microcomputer. The running steps are input by keyboard in this control system, displayed by the LED tube. The signal is transformed by single-chip microcomputer . The signal Loop allotter is achieved by software. The photoelectricity seclusion is achieved by Electro-optical disconnector. The signal is enlarged by power Amplifier. Then the signal can run the stepping motor. The system’s run is controlled by functional keys. Stepping motor will run to the given steps if the “start”key is pressed. Meanwhile, stepping motor will stop if the “stop”key is pressed. There are limit switches on the two heads of the workbench, if the workbench go beyond the terminal position, the limit switch is off, the stepping motor will be stop at once, and the buzzer scream.Keywords workbench stepping motor single-chip microcomputer1 绪论 (1)课题研究的背景 (1)工作台的发展现状与方向 (1)本课题研究的范围和意义 (3)步进电机的发展现状 (3)单片机的发展现状 (4)2 控制系统的总体设计 (6)系统总体方案 (6)机械系统 (6)控制系统设计 (6)2.3.1接口设计 (6)2.3.2控制方案的选择 (7)2.3.3伺服系统设计 (7)3 控制系统的设计方案 (8)硬件系统设计 (8)3.1.1系统的硬件结构 (8)3.1.2步进电机 (8)3.1.3微处理器的选择 (15)3.1.4键盘操作的接口电路设计 (17)3.1.5显示部分操作的接口和电路设计 (21)3.1.6 报警电路的设计 (24)3.1.7 单片机与PC机的通信 (25)3.1.8系统的抗干扰设计 (26)软件系统设计 (28)3.2.1 软件结构设计 (28)3.2.2系统的程序流程 (29)结论 (40)致谢 (41)参考文献 (42)课题研究的背景当今社会,随着科技的发展,工作台的应用越来越广泛。
具有角度修正功能的大行程二维纳米工作台
具 有 角 度 修 正 功 能 的大 行 程 二 维 纳 米 工 作 台
张昔峰, 黄强先 , 袁 钰, 黄 肿
( 合肥工业大学 仪器科学与光 电工程学院, 安徽 合肥 2 3 0 0 0 9 )
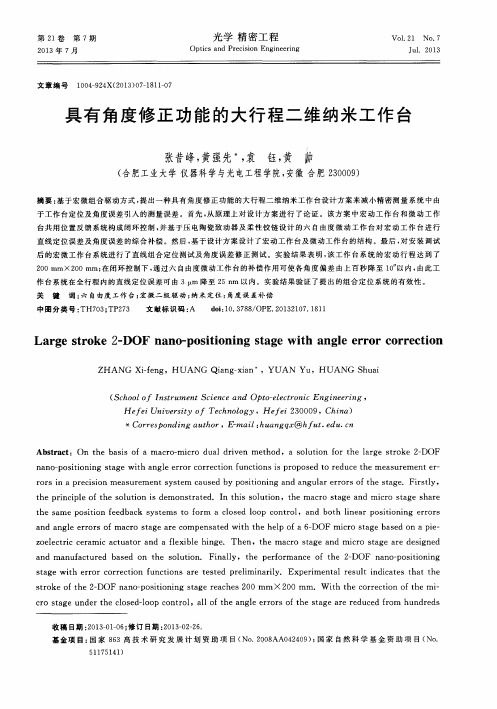
摘要: 基于宏微组合驱动方式 , 提出一种具有角度修正 功能的大行程二维纳米工作台设计方案来减小精密测量 系统 中由
Ab s t r a c t :On t h e ba s i s of a ma c r o — mi c r o du a l d r i v e n me t h od,a s o l ut i on f o r t he l a r g e s t r o ke 2 一 DOF
n a n o — — p o s i t i o n i n g s t a g e wi t h a n g l e e r r o r c o r r e c t i o n f u n c t i o n s i s p r o p o s e d t o r e d u c e t h e me a s u r e me n t e r 。 _
La r g e s t r o ke 2 - DOF n a no ’ ’ p o s i t i o ni ng s t a g e wi t h a ng l e e r r o r c o r r e c t i o n
ZHANG Xi — f e n g,HUANG Qi a n g — x i a n ,YUAN Yu,HUANG S h u a i
第2 1卷
第 7期
光 学 精 密 工 程
Op t i c s a n d Pr e c i s i o n En gi ne e r i n g
基于柔性铰链结构的二维微动工作台的设计分析
sif e so h t g a re u y u i g t ep r me rca a y i.A e d sg e h d i d ca e n t ep p ri tf s ft e s a e i c r id o t sn h a a t i n l ss n s b n w e i nm t o s e l r d i h a e n
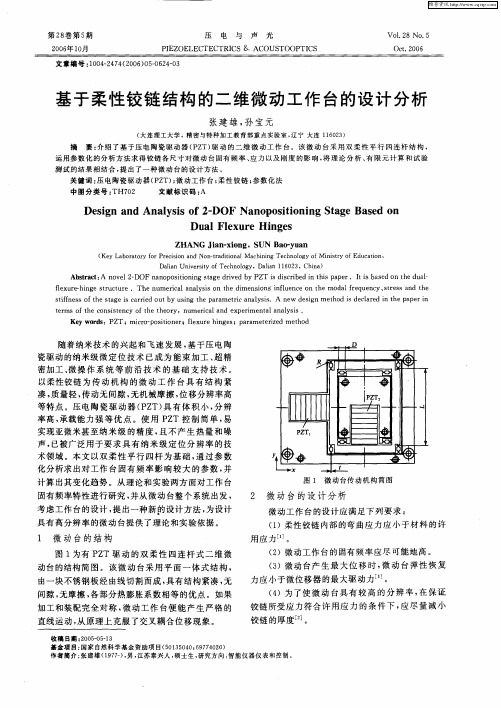
图 1 微 动 台传 动 机 构 简 图
2 微 动 台的 设 计 分 析
微动 工作 台的设计 应满 足下 列要 求 : ( )柔性 铰链 内部 的弯 曲应 力应 小 于 材料 的许 1
基 于 柔性 铰 链 结构 的 二 维微 动 工 作 台的设 计 分 ቤተ መጻሕፍቲ ባይዱ
张建 雄 , 宝元 孙
( 大连理工大学 ,精密与特种加 工教育部重点实验室 , 宁 大连 1 62 ) 辽 1 03
摘
要 : 绍 了 基 于 压 电 陶 瓷 驱 动 器 ( Z 驱 动 的 二 维 微 动 工作 台 。该 微 动 台 采 用 双 柔 性 平 行 四连 杆 结 构 , 介 P T)
运用 参 数 化 的分 析 方 法 求 得 铰 链 各 尺 寸 对 微 动 台 固有 频 率 、 力 以及 刚度 的 影 响 , 理 论 分 析 、 限 元 计 算 和 试 验 应 将 有 测 试 的结 果 相 结 合 , 出 了一 种微 动 台 的 设 计 方 法 。 提 关 键 词 : 电 陶 瓷驱 动 器 ( Z ) 微 动 工 作 台 ; 性 铰 链 ; 数 化法 压 PT; 柔 参
Ab ta t A o e - sr c : n v l DOF n n p st n n tg rv d b T i d s r e h sp p r. t sb s d o h u l 2 a o o i o i gs a ed i e y PZ s i e i d i t i a e I a e n t ed a- i b n i
二维精密工作台设计

⼆维精密⼯作台设计⽬录第⼀节《测控仪器课程设计》要求 (1)第⼆节国内外现状 (2)第三节⽅案设计 (5)第四节测量控制⽅法设计 (13)第五节未来展望与总结 (18)参考⽂献 (20)第⼀节《测控仪器课程设计》要求⼀课程设计⽬的:测控仪器课程设计是⼀次⽐较完整的仪器设计,它是理论联系实际、培养初步设计能⼒的重要教学环节,完成课程设计的⽬的有⼀下⼏点:(1)培养学⽣综合地考虑使⽤、经济、⼯艺、安全性等⽅⾯的设计要求,确定合理的设计⽅案。
(2)测控仪器设计是综合光学,电学,机械学,控制等多门课程的⼀个系统⼯程,培养学⽣从全局出发,体会各个学科融合的⼀次实战演练。
(3)培养学⽣仔细阅读本课程指导书和随时查阅有关教材。
(4)通过分析⽐较吸取现有结构中的优点,并在此基础上发挥⾃⼰的创造性,⽽不是简单抄袭或没有根据在臆造;(5)培养学⽣制图功底,训练学⽣通过计算参数,最后完成设计制图的能⼒,(6)了解国内外的技术前沿,以及现有企业可以提供的各种封装产品技术参数。
⼆课程设计技术要求课题名称:基于CCD边缘检测的⼆维测量系统设计要求:1. ⼆维精密⼯作台系统X轴⾏程范围10mm,分辨率0.1um,精度要求0.5um;Y轴⾏程范围10mm,分辨率0.1um,精度要求0.5um;2. CCD测量系统边缘识别,精度要求1um;三设计说明书要求1.根据设计任务要求,确定设计⽅案。
2. 详细讨论系统各部分的实现⽅法和原理。
3.按照技术指标要求计算相应的机械结构参数,有国家标准的零部件,过计算选取。
4.完成设计说明书⼀份,仪器⼯作原理图⼀张,总装配图⼀张(0号),零件图5张以上。
5.提交设计报告书。
要求打印,并列出参考⽂献。
设计说明书要求5000字。
第⼆节国内外现状⼀⼆维精密⼯作台系统随着微电⼦⼯程、计量科学与技术、精密加⼯、纳⽶科学与技术等领域的发展,使微纳⽶定位机构得到了越来越⼴泛的应⽤,各国不断发展微动定位的⼯作,不仅要求有⾼的定位精度,⽽且要求在⽐较⼤的范围内做测量。
直线电机驱动二维精密定位平台的设计研究

基金项 目: 榆林学 院高层次人 才科 研启动基金项 目( 8 K 3 ) 0 G 0 7 作者简 介 : 曹卫锋 (97 ) 男 , 17一 , 陕西 武功人 , 助教 , 在读博 士 , 研究 方 向: 机械设计与制造 的教学 与研 究。
1
Eq i me t u p n Ma ua tig T c n lg . 2 1 n fc r e h oo y No9, 0 2 n
T ANG h - i g , AO Hu - a g , S u yn C i f n MA o q n W ANG e g’ Ru - u , Fn
( . ae t x m n t nC o eai etr f h aet fc B in 0 10C ia 1 P tn E a iai op rt nC ne e t i e ig10 9 ,hn ; o o o T P n O e, j 2 N c a dR da o a t C nr, e ig1 0 8 C ia . ul r n ait nS f y e t B in 0 0 2,hn ) e a i e e j
二维定位平 台总体设计结合 了大范 围超精密定 位系统的技术指标 , 其技术要求如下 : 自由度 : 、 x Y两维 ;
图 1 二 维定 位 平 台 结 构 简 图
在台子 的侧面上 。
收 稿 日期 :0 2 0 - 8 2 1- 6 0 -
重复计算 电机峰值 力和平均连续输 出力 ,校核被选
1 二维定 位平 台的设计
11 总体 设计 .
11. 、7底座导 轨 2上 台 3上 台 电极 动子 4上台输 出部分 5下 台直 . . . . 线 电机 磁轨 6 台光 栅读数头 7下台直线 电机 动子 8 . 上 . . 限位装 机械 置 9 台光栅支架 1 、5 台导 轨 l. . 上 O 1. 上 1 下台光栅支架 1. 台直线 2 上 电机 l . 3 上台光栅读数头 l . 台机械限位 1. 4 上 6 底座
二维精密工作台参考

精密机械与仪器设计课程设计说明书二维数控精密工作台学院:机电与信息工程学院班级:测控技术与仪器08级学号:0811350121姓名:吴桥摘要数控机床是一种高度自动化的机床,随着社会生产和科学技术的迅速发展,机械产品的性能和质量不断提高,改型频繁。
机械加工中,多品种、小批量加工约占80%。
这样,对机床不仅要求具有高的精度和生产效率,而且还要具备“柔性”,即灵活通用,能迅速适应加工零件的变更。
数控机床较好地解决了形状复杂、精密、小批、多变的零件加工问题,具有适应性强、加工精度高、工质量稳定和生产效率高等优点,是一种灵活而高效的自动化机床。
精密数控工作台可广泛应用于激光焊接、层射线扫描、械手检测装置及实用教学领域。
随着电子、自动化、计算机和精密测试等技术的发展,数控机床在机械制造业中的地位将更加重要,而X-Y作台是这些设备实现高精密加工的核心部件,对于提高产品的加工质量起着尤为重要作用。
关键字:数控工作台步进电机控制滚珠导轨目录一、二维数控精密工作台的原理 (1)二、传动方案的确定 (2)三、机械系统设计的整体方案 (2)(一)工作台总体结构的确定 (2)(1)丝杆螺母副的选用 (2)(2)导轨副的选用 (3)(3)联轴器的选用 (3)(4)电动机的选用 (3)(二)绘制总体方案图 (3)(三)工作台质量计算 (4)(四)滚珠丝杆选择 (4)(1)滚珠丝杆工作长度计算 (5)(2)滚珠丝杠副载荷及转速计算 (5)(3)确定预期额定动载额 (6)(4)传动形式和支承方式的选择 (7)(5)滚珠丝杆副稳定性校核 (9)(6)滚珠丝杆副的刚度计算 (10)(五)直线滚动导轨选择计算 (10)(1)导轨型式选择 (10)(2)导轨额定寿命计算 (11)(六)步进电机的计算与选型 (12)(七)联轴器的选定 (14)(八)轴承选择 (15)四、控制系统设计 (15)(一)控制系统总体方案 (15)(二)控制系统具体方案 (16)(三)光栅传感器 (17)五、结论 (18)六、参考资料 (19)一、二维数控精密工作台的原理如图2.1.1所示为二维数控平台实验原理样机原理图,图2.1.2为二维数控平台实物照片。
精密微动工作台二维微位移机构的设计研究

i at fc i nd S n.. on a O o
Ke r s:m ir — d s lc y wo d co ip a eme s nt wor t b e ; iv ng wih ee tosrci e c r m is fe i l me k a l dr i t l r ti tv e a c ; x be ge l c l
分 析 了 为 消 除 机 构 间 隙 和 工 作 台爬 行 , 高 定 位 精 度 和 响 应 速 度 所 采 取 的 技 术 措 施 : 致 伸 缩 陶 瓷 驱 提 电
动、 柔性 铰 链 与杠 杆 放 大 一体 化 结 构 等 。
关 键 词 : 动 工 作 台 ; 性 铰 链 ; 致 伸 缩 陶 瓷 微 柔 电
pr v r abe o int ton pr iin an e p ns o e wo kt l re a i e so d r s o e. Th y a e fe i l eme ,drvng wih e e tosrctv e amis,lv r ma i c e r x be g l l i i t l r ti i ec r c c e e gn —
滚 珠 丝 杆 驱 动 、 动 导 轨 支 承 。 要 实 现 亚 微 米 级 的 定 滚
作为 驱 动器 , 图 1 如 所 示 。其机 构 原 理 如
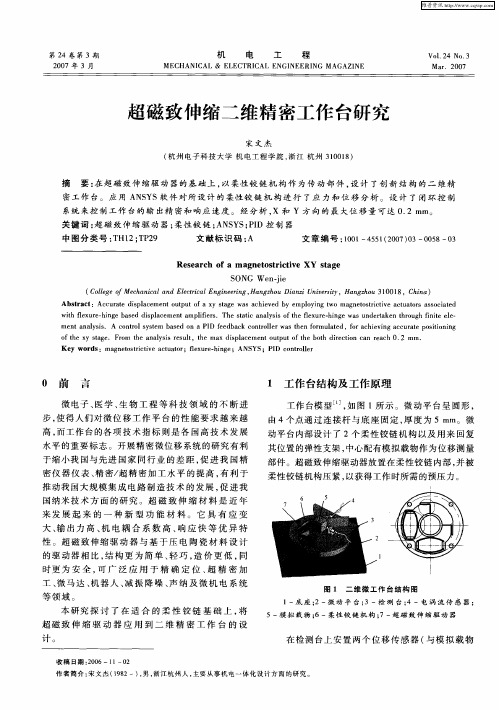
超磁致伸缩二维精密工作台研究
于缩小我 国与先 进 国家 同行 业 的差 距 , 进 我 国精 促 密 仪器 仪 表 、 精密/ 精密 加 工水 平 的提 高 , 利 于 超 有
推 动我 国大规模 集 成 电路 制 造技 术 的发 展 , 促进 我 国纳米技 术 方 面 的研 究 。超 磁 致 伸 缩 材 料 是 近 年 来 发 展 起 来 的 一 种 新 型 功 能 材 料 。它 具 有 应 变
宋 文 杰
( 州 电子 科 技 大 学 机 电工 程 学 院 , 江 杭州 3 0 1 ) 杭 浙 1 0 8
摘 要 : 在超磁 致 伸缩驱 动 器的基础 上 , 以柔性铰 链 机 构作 为 传动 部件 , 设计 了创 新 结 构 的二 维精
密 工 作 台 。 应 用 A S S软 件 对 所 设 计 的 柔性 铰 链 机 构 进 行 了应 力 和 位 移 分 析 。 设 计 了 闭 环 控 制 NY 系统 来控 制 工 作 台 的 输 出精 密 和 响 应 速 度 。 经 分 析 , 和 Y 方 向 的 最 大 位 移 量 可 达 0 2 ml X . i。 l 关键词 : 磁 致伸 缩驱动 器 ; 性铰链 ; N Y ;I 超 柔 A S S PD控 制 器 中 图 分 类 号 : H1 ; P 9 T 2 T 2 文 献 标 识 码 : A 文 章 编 号 :0 1 45 (070 — 08 0 10 — 5120 )3 05 — 3
Absr c ta t:Ac urt ip a e nto t u fa x tg s a hiv d by e l yn wo ma n tsrc ie a tatr s o itd c a e ds lc me u p to y sa e wa c e e mp o i g t g e 0 titv cu os a s cae
二维微动工作台的定位误差补偿实验

二维微动工作 台的定位误差补偿实验
林 杰俊 ,李 东升 ,沈小燕
( 中 国计 量 学 院计 量测 试 工程 学 院 ,浙 江杭 州 3 1 0 0 1 8 )
摘要 :随着科学技术 的发展 ,超精密定位技术在各领 域得 到了广泛应用 ,它的研究对 ME MS技术 的发 展具有重要 的意 义 。对具有纳米定位 精度的二维微动工作 台的定位误 差进行研究 。首先 ,对分 辨率为 0 . 1 5 n m的双频激光 干涉仪进行 了测
量误差分析 ,其标定 二维微动工作 台时 的测量精度 为 1 4 . 4 n m;利用该 激光干涉 仪标定 时温漂 的近线性 关系去 除 了定 位误
差 中的综合误差 ,采用反相补偿法对定位误差 中的系统误差进行 了补偿 。测得 该工 作台补偿 前 的定 位误 差在 2 5 0— 3 0 0 n m 之 间,在空气 弹簧 隔振平 台上进行 了误差补偿实 验 ,测得 补偿 后两轴的定位误差分 别为 2 0 n m和 2 5 n m左右 。实验证 明了 该种方法用 于补偿 纳米定位系统 的可行性 。
n o l o y .T g h e r e s e a r c h o n c o mp e n s a t i o n o f p o s i t i o n i n g e ro s r f o r t wo — d i me n s i o n mi c r o d i s p l a c e me n t s t a g e w i t h n a n o — p o s i t i o n i n g a c c u r a c y w a s a i me d a t .F i r s t l y ,t h e me a s u r e me n t e r r o r o f t wo — f r e q u e n c y l a s e r i n t e r f e o me r t e r w i t h r e s o l u t i o n a t 0 . 1 5 n m w a s a n a l y z e d,a n d t h e me a s u i r n g a c c u r a c y wa s a t 1 4 . 4 n m w h e n i t wa s c li a b r a t i n g t h e t w o — d i me n s i o n mi c r o d i s p l a c e me n t s t a g e .Th e s y n t h e t i c e ro r i n p o s i t i o ・ n i n g e r r o r s b y t h e a p p r o x i ma t e l y l i n e a r r e l a t i o n s h i p o f t e mp e r a t u r e d i r t f w h e n c a l i b r a t i n g b y u s i n g i t wa s r e mo v e d ,a n d t h e s y s t e ma t i c e r —
二维工作台装配及调整电子教案

(6)按照导轨安装孔中心到基准面B的距离要求(用深度游标卡尺测量),调整44(直线导轨2)与49(导轨定位基准块)之间的调整垫片使之达到图纸要求。
5.螺钉、平垫片、弹簧垫圈等的准备。
(二)二维工作台的装配步骤
1、安装直线导轨1
(1)以30(底板)的侧面(磨削面)为基准面A,调整30(底板)的方向,将基准面A朝向操作者,以便以此面为基准安装直线导轨。
(2)将29(直线导轨1)中的一根放到30(底板)上,使导轨的两端靠在30(底板)上49(导轨定位基准块)上(如果导轨由于固定孔位限制不能靠在定位基准块上,则在导轨与定位基准块之间增加调整垫片),用M4×16的内六角螺钉预紧该直线导轨(加弹垫)。如右图:
注:为了控制两角接触轴承的预紧力,轴承及轴承内、外隔圈应经过测量。
(3)将26(轴承座1)和14(轴承座2)分别安装在丝杆上,用M4×10内六角螺钉将3(端盖1)、41(端盖2)固定。
注:通过测量轴承座与端盖之间的间隙,选择相应的调整垫片。
教学环节
教学内容
附记
实训内容
(4)用M6×30内六角螺钉(加Φ6平垫片、弹簧垫圈)将轴承座预紧在底板上。在丝杆主动端安装53(限位套管)、2(M14×1.5圆螺母)、1(齿轮)、54(轴端挡圈)、56(M4×10外六角螺钉)和31(键4×4×16)。
注:后续的安装工作均以该直线导轨为安装基准(以下称该导轨为基准导轨)。
(5)将另一根29(直线导轨1)放到底板上,用内六角螺钉预紧此导轨,用游标卡尺测量两导轨之间的距离,通过调整导轨与导轨定位基准块之间的调整垫片,将两导轨
X-Y二维工作台设计
第一章总体设计 (3)1.1 CNC工作台的组成、结构、特点 (3)1.1.1 CNC工作平台的主要组成 (3)1.1.2 CNC工作平台的结构 (3)1.1.3 CNC工作台的特性 (4)1.2合理拟定并选择传动方案 (4)1.2.1 按丝杠与螺母的相对运动分 (4)1.2.2 按摩擦性质不同分类 (5)1.3确定CNC工作台的结构和零部件的类型 (5)1.3.1确定CNC二维工作平台的结构类型 (5)1.4确定导轨类型 (5)1.4.1普通滑动导轨 (6)1.5 选择轴承类型及支撑方式 (7)1.5.1 轴承类型选择 (7)1.5.2 支承方式 (8)1.6 初选联轴器 ...........................................................1.7 初步确定机体结构 .................................................1.8 伺服系统...............................................................1.8.1 开环伺服系统 (9)1.8.2 闭环伺服系统 (9)1.9 选择控制电机 (9)第二章螺旋传动结构及其零件设计 (12)2.1 螺旋传动结构概述 (12)2.2滚动丝杠及螺母设计 (12)2.2.1螺纹滚道型面 (13)2.2.2滚珠返回的循环方式 (14)2.2.3轴向间隙和预紧的调整方法 (15)2.2.4滚珠丝杠副主要尺寸的确定 (16)2.2.5 X和Y方向丝杠的具体设计 (17)第三章装配图设计第一阶段 (24)3.1导轨的设计 (24)3.1.1、滑动导轨设计 (24)3.1.2、滑动导轨的材料及热处理 (24)3.1.3、导轨刚度校核 (25)3.2 确定丝杠轴承的型号、尺寸、润滑方式并校核 (25)3.2.1丝杠轴承的具体选择 (26)3.2.2确定轴承的尺寸 (26)3.2.3对滚动轴承进行校核 (26)3.2.4选择轴承润滑方式 (29)3.3 丝杠、螺母与工作台滑板的联接设计 (29)3.3.1、丝杠与螺母的主要参数 (29)3.3.2、螺母与工作台滑板的联接设计 (30)3.3.3、确定滚珠丝杠的全部几何尺寸 (31)第四章装配图设计第二阶段 (31)第一章总体设计总体设计非常重要,是对一部机器的总体布局和全局的安排。
微机电系统二维微动工作台微位移机构特性研究

计
算
、
接
口
可电 调 源H
徽移构 位机
机
电
路
双 激 干 仪 卜- 频光涉 卜 -
图 1 二 维 微 动 工 作 台 结 构 框 图
di pl c me s wor a e s t m e i s a e nt kt bl ys e d s gn, m p o ng i r vi
铰 链 中图 分 类 号 : 12 5 TH 1 .
文献标识码 : A
文 章 编 号 :0 1 2 5 (0 2 O —0 3 —0 10 — 2 7 20 )6 0 9 3
A bs r c : hi t a t T s pap r i r e nt odu e t sgn c d he de i of
1 系统 组 成 和 工 作 原 理
精 密 二 维 微 动 工 作 台 系 统 结 构 如 图 1所 示 。
lv rfe i l n ej i c a ims Theee to— e e lx b ehig ontme h n s . lc r
m e ha c ouplng m od hi i r — dipl c . c nialc i eloft s m c o — s a e. me s nt m e h c anim ha e buit s s be n l .T he ap ve p er gi s e pha i t t a l i of he t a ii m s s o he na ys s t r ns tona r — l e s ns s e dy s a e e po e an t i f c f — po e, t a t t r s ns d he r afe t ac t s or .Som e s ge tons ug s i ha e be n m ad i r — v e e on m c o
优秀机械毕业设计二维步进单片机控制工作台机械系统设计(含全套cad图纸)

单片机控制的 X-Y 工作台系统可以设计为开环,半闭环和闭环伺服系统三种。本设计 采用开环伺服系统,通过单片机控制步进电动机的驱动,经传动机构动带动工作台的运动。 系统没有检测装置。机械结构设计首先根据工作台的最大载荷,选取导轨副,设计工作台, 然后进行结构设计,受力分析,转矩计算,画出工作台的装配草图,再选择步进电动机的 型号,进而设计选择滚珠丝杠,最后设计出 X-Y 工作台,画出其装配图。 关键词 工作台;步进电机;脉冲当量;步距角
2 方案原理的设计.......................................................................................................................... 6 2.1 总体方案的选择和说明........................................................................................................ 6 2.2 总体方案实现的系统组成框图............................................................................................ 7
III
徐州工程 学院毕业设计 (论文 )
目录
1 绪论.............................................................................................................................................. 1 1.1 课题研究的背景.................................................................................................................... 1 1.2 工作台的分类........................................................................................................................ 1 1.3 本设计工作台的作用和特点................................................................................................ 3 1.4 步进电机的发展现状............................................................................................................ 3 1.5 单片机的发展现状................................................................................................................ 5
二维精密工作台

精密机械与仪器设计课程设计说明书二维数控精密工作台摘要数控机床是一种高度自动化的机床,随着社会生产和科学技术的迅速发展,机械产品的性能和质量不断提高,改型频繁。
机械加工中,多品种、小批量加工约占80%。
这样,对机床不仅要求具有高的精度和生产效率,而且还要具备“柔性”,即灵活通用,能迅速适应加工零件的变更。
数控机床较好地解决了形状复杂、精密、小批、多变的零件加工问题,具有适应性强、加工精度高、工质量稳定和生产效率高等优点,是一种灵活而高效的自动化机床。
精密数控工作台可广泛应用于激光焊接、层射线扫描、械手检测装置及实用教学领域。
随着电子、自动化、计算机和精密测试等技术的发展,数控机床在机械制造业中的地位将更加重要,而X-Y作台是这些设备实现高精密加工的核心部件,对于提高产品的加工质量起着尤为重要作用。
关键字:数控工作台步进电机控制滚珠导轨丝杠目录1. 绪论 (4)1.1. 课程设计的设计要求 (4)1.2. 本课题设计的背景 (5)1.3. 本课题设计内容 (5)1.4. 本课题设计的目的和意义 (6)1.5. 总体方案设计 (6)1.5.1.设计任务 (6)1.5.2.总体方案确定 (7)2. 机械系统设计 (9)2.1. 工作台外形尺寸及重量估算 (9)2.2. 滚动导轨的参数确定 (10)2.3. 滚珠丝杠的设计计算 (11)2.4. 步进电机的选用 (15)2.5. 联轴器的选用 (17)2.6. 步进电机惯性负载的计算 (18)2.7. 二维数控精密工作台的误差来源与分析 (21)3. 结论 (22)致谢 (24)参考文献: (25)1.绪论引言现代科学技术的不断发展,极大地推动了不同学科的交叉与渗透,导致了工程领域的技术革命与改造。
在机械工程领域,由于微电子技术和计算机技术的迅速发展及其向机械工业的渗透所形成的机电一体化,使机械工业的技术结构、产品机构、功能与构成、生产方式及管理体系发生了巨大变化,使工业生产由“机械电气化”迈入了“机电一体化”为特征的发展阶段。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
二维微动精密工作台
摘要二维微动精密工作台是一种高精度的测量系统,用于扫描测量被测件表面的微观形貌,在扫描测量工作中要求达到微米级的运动精度,为此建立了x-z方向的精密运动平台,在二维测量方向上分别达到相应的测量精度要求,并对静压气浮导轨、精密滚动丝杆、滚动摩擦导轨控制等关键技术进行了研究。
静压气浮导轨采用了有限元法的设计,使其具有较高的承载能力和刚度。
该装置采用模糊pid控制技术,改善了非线性因素的影响,从而获得较高的稳态位置精度。
关键词二维微动精密工作台;静压气浮导轨;模糊pid控制技术
中图分类号th122-62 文献标识码a 文章编号 1674-6708(2011)52-0078-02
0 引言
精密测量是现代高新科学领域最为关键和共性的基础技术之一,在尖端工业生产和科学研究中占有极其重要的地位,具有广阔的应用前景。
随着技术的发展,对精密微动平台的运动精度要求也越来越高。
对于高精度微小尺寸的二维测量,可以通过x、z两个方向运动的合成,实现对其平面微观形貌的测量。
本设计采用闭式矩形静压气浮导轨,具有摩擦小、寿命长、速度高、精密度高、无污染等优点。
采用有限元设计方法设计气浮导轨,使运动平台具有
较高的承载能力和刚度;对传统的pid控制技术进行改进,采用模糊pid控制技术,使运动平台具有较高的定位精度。
z向由于运动部件的重力与运动方向相同,会影响气浮导轨的驱动性能,所以采用加配重方法平衡气浮导轨产生的重力。
1 总体方案设计
1.1 测量原理
x-z二维精密微动工作台主要是把旋转运动变为直线运动,以传递运动为主,要求结构紧凑,有较高的传动精度。
因为切削力不大,同时出于对传动刚度的考虑,所以确定对x方向采用步进电机装置配合精密滚动丝杆和滚动摩擦导轨设计,使得x方向具有定位精度较高等特点; z方向使用“无摩擦运动”的气浮导轨外加光栅尺、配重实现位移,可实现微小位移的运动,且具有定位精度高、摩擦小和运动平稳等优点。
x-z二维精密工作台是高精度运动平台的发展方向,它们的移动相互独立,互不影响。
1.2 测量方法的设计
图1 图2
图1、图2为二维精密微动工作台的机械结构。
测量开始时,被测工件置于工作台上并将其固定。
步进电机通过联轴器带动精密滚动丝杆转动,滚动摩擦导轨与精密滚动丝杆相连接,将旋转运动转换成直线运动,与滚动摩擦导轨固连的工作台随之做直线运动,实现了x方向的移动。
z轴方向由于自身的重力与运动方向相同,故
通过加配重来减轻自身的重量。
由于气浮导轨开始运动后,是由气浮导轨中间隙间的气膜产生运动,其摩擦力很小,对气浮导轨的上下运动几乎没有影响。
测头在物体表面上探测其形貌而上下移动,从而带动气浮导轨运动,其上的光栅传感器连接数显表,由数显表将其运动数值反映给操作者。
重物配重虽然运动平稳,但是会增加摩擦力,易产生爬行现象。
因此,选用气动配重,可以驱使电机负载为零,提高运动的定位精度和速度的平稳性,从而提高了平台的运动精度。
2 平台气浮导轨设计
2.1 静压气浮导轨
气浮导轨也称为空气静压导轨,是由导轨和滑块组成的滑动副,导轨间有一层很薄的气膜作为工作介质,利用外部的压缩气体充分干燥并过滤后通过一些开在导轨表面上的节流器导入空气使导轨
和滑块间充满压缩空气,并借助形成的压力气膜来支承负载并实现平稳工作,气浮导轨具有运动精度高、摩擦阻力小、磨损率近乎为零、噪声低、振动小、运动平稳无爬行现象、高刚度等优点,可以使定位工作台及滑板获得较高的运动精度。
而且气体导轨的使用寿命长,维护也比较容易。
因此,在精密测量仪器中的应用越来越广泛。
2.2 气浮导轨的有限元设计
有限元设计法是首先将其划分为有规律的若干矩形网格,利用
雷诺方程来求解。
假设间隙气体的流动是等温的,则可用雷诺化简方程表示:
(1)
由于周围都是空气环境,所以其边界条件是:
① x=0,x=l时,p=pa
② y=0,y=n时,p=pa (2)
其中,pa为环境的气体压力。
在(2)的条件下求解(1)式,便可求出气体的压力场分布。
再根据下图3所示步骤便可求出气浮导轨的输入输出气体量。
左图3中p0为节流孔出口压力;ps为供气压力;w为承载能力;m为气膜厚度;win为流入的气体量;wout 为流出的气体量;ε为精度阈值。
3 控制方式
微动小量程工作台,定位精度要求很高,需要很强的抗干扰能力,传统的pid控制技术很难达到满意的效果,由于存在旋转运动与直线运动的转换,会引入非线性误差,为了更好的消除非线性误差,可以采用模糊pid控制。
它具有很强的鲁棒性,可以消除非线性误差。
如图4所示是一个基于离散论域的模糊pid。
图4控制器的系统结构图
其中,k1、k2、k3、k4、k5为尺度变换的比例因子;m1、m2和m3为查表所得的值;kp为比例系数;ki为积分作用系数;kd为微
分作用系数。
建立控制规则:定义系统偏差绝对值|e(x)|、偏差变化率绝对值|△e(k)|。
1)当|e(x)|较大时,即为加快系统的响应速度,应取较大的kp 和较小的kd,并且去掉积分作用;
2)当|e(x)|和|△e(k)|为中等大小时,应取较小的ki值,kp 和kd值大小适中,以保证系统的响应速度;
3)当|e(x)|较小时,应增大kp和ki值,使系统具有良好的稳态性能,同时应适当的选取kd值,其原则是:当|△e(k)|较小时,kd值可取大些,通常取为中等大小;当|△e(k)|较大时,kd应取小些。
4 结论
1)新型x-z二维精密微动工作台采用气动配重,运动精度增加;2)气浮导轨采用有限元设计法,不必考虑扩散效应,承载能力可根据大气压的增大而增大,而且简便、可靠、易行;3)与传统的pid控制技术相比,采用模糊pid控制技术提高了测量精度;4)设计的x-z二维精密微动工作台具有微米级的定位精度,适合于作为高精度的小尺寸测量仪的运动平台。
参考文献
[1]孙麟治,李鸣鸣,程维明.精密定位技术研究[j].光学精密工程,2005,11(13):69-75.
[2]刘向阳,郁鼎文,冯平法.竖直运动平台气动配重的研究[j].机械科学与技术,2006,25(3):352-354.
[3]陶家生.闭式双排节流孔矩形气浮导轨的计算方法[j].光学精密工程,1997,2(1):55-61.
[4]马明建,辛世界,王辉林,等.静压式平面空气轴承压力场得有限元分析[j].农业机械学报,1994,12(4):91-97.
[5]吕春兰,王立国,孟亚男,姜德龙.基于模糊自整定pid参数控制器的设计[j].吉林化工学院学报,2002,19(2):33-34.
[6]桑武斌.二维超精工件台及其控制系统的研究[d].杭州:浙江大学研究生院,2008:46-52.
[7]徐灏.机械设计手册(3)[m].北京:机械工业出版社,2003.
[8]浦昭邦,王宝光.测控仪器设计[m].北京:机械工业出版社,2010.。