蓝桥杯第五届模拟智能灌溉系统(HGS)
基于单片机的智能抽水灌溉系统设计

基于单片机的智能抽水灌溉系统设计智能抽水灌溉系统是一种利用单片机控制的系统,通过感应土壤湿度、温度、光照等指标,自动调节水泵的工作状态和灌溉量,从而实现对农作物的精准灌溉。
本文将详细介绍基于单片机的智能抽水灌溉系统的设计。
首先,智能抽水灌溉系统的硬件设计需要包括以下几个模块:传感器模块、单片机模块、执行器模块和电源模块。
传感器模块主要包括土壤湿度传感器、温度传感器和光敏传感器,用于实时监测环境参数;单片机模块则负责获取传感器数据,计算灌溉所需水量,并控制水泵和阀门的开关;执行器模块主要是水泵和阀门,用于控制水的供给和停止;电源模块则提供系统的电力供应。
在软件设计方面,首先需要编写单片机的驱动程序,包括读取传感器数据、控制执行器模块的开关和计算灌溉所需的水量等功能。
其次,需要设计一个基于传感器数据和用户设定的灌溉策略算法,用于判断何时开始灌溉、灌溉的时长和水量,并根据计算结果控制水泵和阀门的开关。
最后,将所有功能整合在一起,形成一个完整的智能抽水灌溉系统。
具体实现步骤如下:1.硬件设计:选择合适的单片机和传感器模块,并进行电路设计和连接。
将传感器模块与单片机模块相连接,通过模拟输入引脚读取传感器数据。
将单片机模块与执行器模块相连接,通过数字输出引脚控制水泵和阀门的开关。
2.软件设计:编写单片机的驱动程序,通过模拟输入引脚读取传感器数据,并通过数字输出引脚控制执行器模块的开关。
编写灌溉策略算法,根据传感器数据和用户设定的灌溉策略计算灌溉所需的水量,并控制水泵和阀门的开关。
编写用户界面程序,用于设置灌溉策略的参数和显示实时的传感器数据。
3.系统测试:完成硬件和软件设计后,进行系统的测试和调试。
首先测试传感器模块是否正常,通过模拟输入引脚读取传感器数据并在终端显示。
然后测试单片机模块是否正常,通过数字输出引脚控制水泵和阀门的开关。
最后测试整个系统的功能,包括传感器数据的读取、灌溉策略的计算和水泵和阀门的控制。
基于单片机的智能抽水灌溉系统设计
基于单片机的智能抽水灌溉系统设计目录1. 内容概要 (2)1.1 研究背景 (3)1.2 研究意义 (4)1.3 国内外研究现状 (5)1.4 研究内容与方法 (6)2. 智能抽水灌溉系统概述 (7)2.1 系统功能与目标 (8)2.2 系统组成 (10)3. 基于单片机的控制系统设计 (10)3.1 硬件设计 (12)3.1.1 单片机选择 (13)3.1.2 电源模块设计 (14)3.1.3 泵电机控制模块 (16)3.1.4 传感器及接口设计 (17)3.2 软件设计 (18)3.2.1 控制策略 (19)3.2.2 实时操作系统应用 (19)3.2.3 用户界面设计 (20)4. 灌溉系统的精准控制策略 (22)4.1 土壤湿度检测与控制 (23)4.2 水位检测与控制 (24)4.3 气候条件分析与控制 (24)4.4 人工神经网络在控制中的应用 (26)5. 系统优化与调试 (27)5.1 系统性能指标 (29)5.2 系统优化方法 (30)5.3 系统调试与测试 (30)6. 系统实施与应用案例 (31)6.1 系统实施流程 (32)6.2 应用案例分析 (34)6.3 系统维护与优化 (35)7. 结论与展望 (36)7.1 研究成果总结 (37)7.2 存在问题与不足 (38)7.3 未来工作展望 (39)1. 内容概要本文档旨在阐述基于单片机技术的智能抽水灌溉系统的设计概念、实现方案及应用前景。
文章将分章节探讨该系统的核心内容和功能:系统概述:介绍系统设计理念、目的及发展方向,强调智能灌溉系统的重要性及其在现代农业中的应用价值。
市场需求与技术背景:分析当前市场对高效、智能灌溉系统的需求,概述相关技术的发展现状,包括传感器、微控制器、通信协议及远程监控技术。
系统架构:详述智能灌溉系统的硬件组成及软件核心模块。
详细介绍单片机的选择、外围电路设计,如水分传感器、土壤墒情传感器、水流量传感器等,以及系统的通信模块实现。
基于Arduino的智能花卉灌溉系统设计

基于Arduino的智能花卉灌溉系统设计张玉桃;王韧;郑仰国;张满堂;赵大旭【摘要】针对阳台、露台等花卉种植环境,本文设计了一个智能化的灌溉与施肥系统.该控制系统通过传感器,可以在分别设定的控制周期内检测并返回环境参数至MCU,在和给定阈值进行比对后,MCU根据已有控制策略输出控制指令,自动实施灌溉和施肥.该系统能在无人值守情况下正常运行,能满足家庭种植和花卉管理的需要.【期刊名称】《河南科技》【年(卷),期】2019(000)008【总页数】4页(P25-28)【关键词】花卉种植;智能化;灌溉系统;Arduino【作者】张玉桃;王韧;郑仰国;张满堂;赵大旭【作者单位】浙江农林大学浙江杭州,311300;湖南工业职业技术学院,湖南长沙410208;浙江农林大学浙江杭州,311300;浙江农林大学浙江杭州,311300;浙江农林大学浙江杭州,311300【正文语种】中文【中图分类】TP241.21 研究背景2010年,上海世界博览会以“城市,让生活更美好”作为主题,展示了城市的发展给人们生活带来的便利。
今天,科技的进步使这个主题得以深层次延续下去,人们愿意在改善居住环境方面投入更多关注,以提高生活质量。
目前,包括花卉种植在内的,能够充分利用窗台、阳台等狭小空间的阳台农业越来越受到重视。
基于回归自然、缓解精神压力和美化环境的需求,新生代白领对阳台农业种植具有较高意愿[1]。
阳台农业不仅指单纯在阳台空间进行农业活动,也包括在屋顶、露台等空间的农业,栽培模式更趋无土性,生产产品趋观赏性与自给性,是现代都市农业中的一种形式[2,3]。
无论是种植环境、种植方式,还是种植目的,阳台农业都与传统农业和城市绿化有较大差别。
阳台农业在我国尚处于发展的初级阶段,无论是技术还是规模,都与发达国家存在较大差距,但发展迅速。
现代智能控制技术的广泛应用,使阳台花园的自动化管理成为现实。
由此,本文主要探讨智能花卉灌溉系统设计,以实现阳台农业自动化。
2013年蓝桥杯第五届单片机省赛模拟试题—模拟智能灌溉系统
P2=0XC0; P0=0X01; P2=0XE0; P0=tab[one]; Delay1ms(); P2=0XC0; P0=0X02; P2=0XE0; P0=tab[two]; Delay1ms(); P2=0XC0; P0=0X04; P2=0XE0; P0=tab[three]; Delay1ms(); P2=0XC0; P0=0X08; P2=0XE0; P0=tab[four]; Delay1ms(); P2=0XC0; P0=0X10; P2=0XE0; P0=tab[five]; Delay1ms(); P2=0XC0; P0=0X20; P2=0XE0; P0=tab[six]; Delay1ms(); P2=0XC0; P0=0X40; P2=0XE0; P0=tab[seven]; Delay1ms(); P2=0XC0; P0=0X80; P2=0XE0; P0=tab[eight]; Delay1ms(); }
RST=0; _nop_(); SCK=0; _nop_();
RST=1; _nop_();
Write_Ds1302_Byte(address); Write_Ds1302_Byte((dat/10<<4)|(dat%10)); RST=0; }
unsigned char Read_Ds1302 ( unsigned char address ) {
unsigned char i,temp=0X00; RST=0; _nop_(); SCK=0; _nop_(); RST=1; _nop_(); Write_Ds1302_Byte(address); for (i=0;i<8;i++) {
智能浇花系统实验报告

一、实验目的1. 掌握智能浇花系统的基本原理和设计方法。
2. 熟悉单片机在智能控制系统中的应用。
3. 提高电子设计实践能力和创新能力。
二、实验原理智能浇花系统是一种基于单片机的自动化控制系统,通过传感器检测土壤湿度,根据预设参数自动控制水泵进行浇灌,实现植物的智能化管理。
本实验采用STC12C5A60S2单片机作为控制核心,利用土壤湿度传感器检测土壤湿度,通过LCD1602显示屏显示数据,并通过按键设置浇灌参数。
三、实验器材1. STC12C5A60S2单片机最小系统板2. 土壤湿度传感器3. 水泵4. LCD1602显示屏5. 44按键矩阵6. 电阻、电容等元器件7. 电源模块8. 仿真软件Proteus四、实验步骤1. 设计智能浇花系统电路图根据实验原理,设计智能浇花系统电路图,包括单片机、土壤湿度传感器、LCD1602显示屏、44按键矩阵、水泵等模块。
2. 编写单片机程序使用C语言编写单片机程序,实现以下功能:(1)初始化单片机硬件资源;(2)读取土壤湿度传感器数据;(3)显示土壤湿度数据;(4)根据预设参数控制水泵进行浇灌;(5)通过按键设置浇灌参数。
3. 仿真实验使用Proteus软件对设计的智能浇花系统进行仿真实验,验证系统功能。
4. 硬件制作根据电路图制作智能浇花系统实物,并进行调试。
5. 测试与优化对智能浇花系统进行测试,验证其性能,并对系统进行优化。
五、实验结果与分析1. 仿真实验结果通过Proteus软件仿真实验,验证了智能浇花系统的基本功能,包括土壤湿度检测、数据显示、参数设置和浇灌控制。
2. 硬件制作结果根据电路图制作智能浇花系统实物,并进行调试。
系统运行稳定,能够根据预设参数自动控制水泵进行浇灌。
3. 测试与优化结果对智能浇花系统进行测试,验证其性能。
测试结果表明,系统能够准确检测土壤湿度,并根据预设参数进行浇灌。
在优化方面,可以通过调整按键设置和显示屏显示内容,提高用户体验。
智能灌溉系统的研究与设计毕业设计(论文)

毕业设计(论文)题目智能灌溉系统的研究与设计摘要本系统系统通过选择合适的传感器将对土壤中含水量以及空气湿度等重要物理量进行采集,通过信号及采集部分将其转化为数字信号,交给单片机系统进行处理,通过智能控制部分,在需要时驱动相关外设,进行自动精确定位地灌溉。
具体流程图如下:工作过程流程图关键字: 智能控制 精确定位 密封 湿度传感器 差动放大 顺序通电 液晶显示机械设计部分整体的机构形式如下所述:水由出水口接入,经过水泵增压后,经过导水软管,最后从管的另一端喷射出来。
机械臂主要由导水软管,套筒,舵机,步进电机和与电机配合的传动装置组成。
套筒下端固结有加工上锥齿的圆环,电机通过锥齿轮传动,带动套筒转动。
舵机固定在套筒上,当套筒旋转时,舵机也随套筒旋转。
导水软管穿过套筒与固定在套筒上端的舵机相固结,当舵机臂摆动时导水软管喷头处完成竖直方向的调整,以使喷出的水能够调整远近。
而套筒转动则实现了喷水方向的调整。
这样,通过水平旋转及竖直摆动,实现了喷灌的精确定位。
考虑到水对电机、齿轮传动部分的腐蚀影响,电机及其与套筒的传动部分通过密封箱密封,导线引出,连接到控制电路部分及电源部分,以实现对机械系统的电力输入及控制。
机械臂通过套筒下端深埋入土壤进行固定。
这种方案是我们经过多次调整最后确定出来的。
下图为我们用机械仿真软件pro/engineer 制作的图形(具体见附图)我们的创新体现在我们的设计过程当中。
在喷口的设计中,由于市场上所售的喷头多导水软管舵机与导水软管连接密封箱套筒利用水压将水达到某个固定位置,因此不能实现喷灌位置的可调性要求。
因此喷管管口需要重新设计。
在喷头处,我们曾试验过多个方案。
其中一个就是拟定用钢管作导水管,将水直接引到喷头,而喷头处设计成喷口可以转动的形式,通过增加一个电机并通过细杆与喷头处连实现竖直方向的转动,水平方向的转动还是靠另一个电动机带动套筒来实现(具体见附proe仿真图)。
但是这种设计有两个问题我们没能解决。
第五届蓝桥杯程序设计大赛省赛题目及答案
第五届省赛1.一个串的子串是指该串的一个连续的局部。
如果不要求连续,则可称为它的子序列。
比如对串: "abcdefg" 而言,"ab","abd","bdef" 等都是它的子序列。
特别地,一个串本身,以及空串也是它的子序列。
对两个串而言,可以有许多的共同的子序列,我们关心的是:它们所共同拥有的长度最大的子序列是多长。
以下代码实现了这个问题的求解。
请填写划线部分缺失的代码。
注意:只填写划线部分缺少的内容,不要填写任何多余的符号或注释、说明等。
例如,不要填写已经给出的小括号。
inline max(int a, int b){return a>b?a:b;}int f(char* x, char* y){if(strlen(x)==0) return 0;if(strlen(y)==0) return 0;if(*x == *y) return f(x+1, y+1) + 1;return max( ______________________ );//处理字符串}int main(){printf("%d\n", f("ac","abcd")); //2printf("%d\n", f("acebbcde1133","xya33bc11de")); //5return 0;}f(x+1,y),f(x,y+1)2.历史上有许多计算圆周率pai的公式,其中,格雷戈里和莱布尼茨发现了下面的公式:pai = 4*(1-1/3+1/5-1/7 ....)参见【图1.png】这个公式简单而优美,但美中不足,它收敛的太慢了。
如果我们四舍五入保留它的两位小数,那么:累积了1项和是:4.00累积了2项和是:2.67累积了3项和是:3.47。
机械创新设计大赛作品
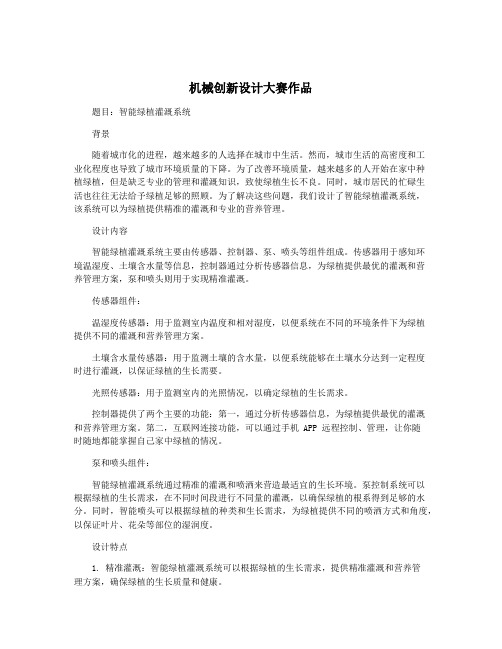
机械创新设计大赛作品题目:智能绿植灌溉系统背景随着城市化的进程,越来越多的人选择在城市中生活。
然而,城市生活的高密度和工业化程度也导致了城市环境质量的下降。
为了改善环境质量,越来越多的人开始在家中种植绿植,但是缺乏专业的管理和灌溉知识,致使绿植生长不良。
同时,城市居民的忙碌生活也往往无法给予绿植足够的照顾。
为了解决这些问题,我们设计了智能绿植灌溉系统,该系统可以为绿植提供精准的灌溉和专业的营养管理。
设计内容智能绿植灌溉系统主要由传感器、控制器、泵、喷头等组件组成。
传感器用于感知环境温湿度、土壤含水量等信息,控制器通过分析传感器信息,为绿植提供最优的灌溉和营养管理方案,泵和喷头则用于实现精准灌溉。
传感器组件:温湿度传感器:用于监测室内温度和相对湿度,以便系统在不同的环境条件下为绿植提供不同的灌溉和营养管理方案。
土壤含水量传感器:用于监测土壤的含水量,以便系统能够在土壤水分达到一定程度时进行灌溉,以保证绿植的生长需要。
光照传感器:用于监测室内的光照情况,以确定绿植的生长需求。
控制器提供了两个主要的功能:第一,通过分析传感器信息,为绿植提供最优的灌溉和营养管理方案。
第二,互联网连接功能,可以通过手机 APP 远程控制、管理,让你随时随地都能掌握自己家中绿植的情况。
泵和喷头组件:智能绿植灌溉系统通过精准的灌溉和喷洒来营造最适宜的生长环境。
泵控制系统可以根据绿植的生长需求,在不同时间段进行不同量的灌溉,以确保绿植的根系得到足够的水分。
同时,智能喷头可以根据绿植的种类和生长需求,为绿植提供不同的喷洒方式和角度,以保证叶片、花朵等部位的湿润度。
设计特点1. 精准灌溉:智能绿植灌溉系统可以根据绿植的生长需求,提供精准灌溉和营养管理方案,确保绿植的生长质量和健康。
2. 省水节能:智能绿植灌溉系统可以根据土壤含水量和环境条件等多项因素,提供最节水的灌溉方案,节约水资源,同时减少能源消耗。
4. 安全可靠:智能绿植灌溉系统具有防止过载、短路、过压、过流等多项安全保护功能,减少电器隐患,保证绿植的安全和稳定性。
基于单片机的智能节水灌溉系统的设计毕业论文

基于单片机的智能节水灌溉系统的设计毕业论文摘要为了解决现代农业中水资源的浪费和人力成本的问题,本论文设计了一种基于单片机的智能节水灌溉系统。
该系统通过传感器实时监测土壤湿度和气温,利用单片机进行数据处理和控制,实现智能灌溉。
实验结果表明,该系统能够根据土壤湿度和气温的变化自动调整灌溉量,实现有效的节水和提高灌溉精度的目的。
引言随着全球人口的增加和气候变化的加剧,农业面临着严峻的水资源问题。
传统的农业灌溉方法存在浪费和低灌溉精度的问题,导致水资源利用效率低下和影响农作物生长。
为了解决这些问题,智能节水灌溉系统应运而生。
该系统通过传感器实时监测土壤湿度和气温,利用单片机进行数据处理和控制,实现智能化的灌溉操作。
本论文旨在设计一种基于单片机的智能节水灌溉系统,提高灌溉精度和节水效果。
方法硬件设计本系统的硬件设计部分包括传感器模块、单片机模块、执行模块等。
1.传感器模块:该模块用于实时监测土壤湿度和气温。
常用的土壤湿度传感器有电阻式和电容式传感器,本系统选择了电容式传感器,因为它对土壤盐分和温度的干扰比较小。
气温传感器采用数字温度传感器,提供准确的气温数据。
2.单片机模块:该模块负责数据处理和控制操作。
本系统采用了ATmega16单片机,它具有较高的性能和丰富的外设资源,能够满足系统的需求。
3.执行模块:该模块负责控制灌溉设备的开关。
本系统使用继电器作为执行模块,通过控制继电器的通断状态,实现灌溉设备的控制。
软件设计本系统的软件设计部分包括传感器数据采集模块、数据处理模块、控制算法模块等。
1.传感器数据采集模块:该模块负责从传感器模块读取土壤湿度和气温数据。
通过指定的时间间隔,定时采集传感器数据,并存储到内存中。
2.数据处理模块:该模块负责对采集到的数据进行处理。
首先,对土壤湿度和气温数据进行滤波处理,以降低噪声干扰;然后,根据设定的灌溉策略,计算出需要灌溉的量。
3.控制算法模块:该模块负责根据数据处理模块计算得到的灌溉量,控制继电器的通断状态。
2013年“蓝桥杯”第五届全国软件和信息技术专业人才大赛单片机设计与开发模拟试卷

准考证号工位号注意:只填写准考证号和工位号,否则试卷作废密 封 线----------------------------------------------------------------------------- 2013年“蓝桥杯”第五届全国软件和信息技术专业人才大赛单片机设计与开发项目模拟试题竞赛时间:5小时题 号 一 二 三 总分 配 分 10分 30分 60分 100分 得 分“模拟智能灌溉系统”设计任务书功能简述要求“模拟智能灌溉系统”能够实现土壤湿度测量、土壤湿度和时间显示、湿度阈值设定及存储等基本功能。
通过电位器Rb2输出电压信号,模拟湿度传感器输出信号,再通过AD 采集完成湿度测量功能;通过DS1302芯片提供时间信息;通过按键完成灌溉系统控制和湿度阈值调整功能,通过LED 完成系统工作状态指示功能。
系统硬件电路主要由单片机控制电路、显示单元、ADC 采集单元、RTC 单元、EEPROM 存储单元、继电器控制电路及报警输出电路组成,系统框图如图1所示:图1. 系统框图MCS-51单片机资料、I2C 总线驱动程序和DS1302时钟芯片驱动程序、CT107D 单片机综合训练平台电路原理图以及本题所涉及到的芯片数据手册,可参考计算机上的电子文档。
程序流程图及相关工程文件请以考生准考证号命名,并保存在计算机上的考生文件夹中,文件夹位于Windows 桌面上。
设计任务及要求1.系统工作及初始化状态说明1.1 自动工作状态,根据湿度数据自动控制打开或关闭灌溉设备,以L1点亮指示;1.2 手动工作状态,通过按键控制打开或关闭灌溉设备,以L2点亮指示;1.3 系统上电后处于自动工作状态,系统初始湿度阈值为50%,此时若湿度低于50%,灌溉设备自动打开,达到50%后,灌溉设备自动关闭;1.4 灌溉设备打开或关闭通过继电器工作状态模拟。
2.数码管单元时间及湿度数据显示格式如图2所示:08- 30805时(8时)分隔符分(30分)熄灭湿度(5%)数码管DS1 数码管DS2图2. 显示格式(8点30分,土壤湿度5%)3.报警输出单元系统工作于手动工作状态下时,若当前湿度低于湿度阈值,蜂鸣器发出提示音,并可通过按键S6关闭提醒功能。
遥控智能花卉灌溉系统设计与实现

遥控智能花卉灌溉系统设计与实现随着科技水平的不断提高,智能化的生活设备也越来越受到人们的青睐。
在现代城市中,花草的生长与健康十分重要,但是人们却常常因忙碌的工作与生活而无法给予他们足够的关注与照顾。
遥控智能花卉灌溉系统的出现,恰好解决了这个问题。
本文将分析智能灌溉系统的优势和设计与实现。
一、遥控智能花卉灌溉系统的优势相比于传统的花卉灌溉方式,遥控智能花卉灌溉系统具有以下几个优势:1. 方便易用采用遥控技术,用户可以通过手机或电脑实现对灌溉系统的控制,尤其是很多忙碌的白领,无论是在公司还是在家中,只需要轻轻一点,就可以为自己的花草进行灌溉和喷雾,同时还可以轻松地掌握它们的生长状况。
2. 自动化程度高遥控智能花卉灌溉系统采用高智能的控制程序,可以自动根据花草的生长状态调整灌溉、喷水等周期和强度,让花草得到科学的照顾,可以保证花草的健康生长。
3. 节省水源与用水更节约在灌溉过程中,智能灌溉系统可以精确控制浇水量和浇水频率,根据花草的生长状态调整浇水量和浇水频率,避免浪费;而且,故障检测系统会自动排除磨损或其他故障,并及时提醒用户,以便及时维修。
二、智能灌溉系统的设计与实现为了实现上述的优势,遥控智能花卉灌溉系统的设计和实现至关重要。
1. 系统构架设计在设计中,需要将灌溉系统分成多级,不同的灌溉阶段需要不同的浇水量和浇水时间,以满足不同花草的生长需求。
同时,还需要根据实际场景进行规划,如所需的温度和湿度控制、设备尺寸、材料等,确保系统和设备的可持续性。
2. 硬件设计硬件设计包括主控板设计、传感器选择、控制器的制作、机械部分设计等方面。
主控板设计需要选择合适的芯片,采用图形化编程界面将系统功能和操作指令编写入主控板中。
传感器选择需要考虑测量温度、湿度、土壤水分等花草生长的关键指标,确保系统能自动调整控制程序。
控制器的制作需要根据不同的灌溉需求设计不同的控制方案,在视觉与实际操作的基础上进行优化。
机械设计要考虑设计的美观性、可移动性和稳定性,这将从根本上保证系统的使用寿命和长期使用效果。
一种可手机远程控制的智能浇水系统设计
一种可手机远程控制的智能浇水系统设计
饶容荣;东鑫渊
【期刊名称】《石河子科技》
【年(卷),期】2024()1
【摘要】由于工作出差或旅游等导致人们无法及时观察到家中的盆栽或绿植的生长状态,为了解决这一问题,智能浇水系统应运而生。
此系统采用CC2530(ZigBee)无线SOC芯片作为核心控制系统构建物联网,温湿度检测传感器放置于土壤内,并配置OV2640摄像头模块对植物进行实时监控,观测植物生长情况。
之后通过ESP8266WiFi模块上传数据到服务器后,即可通过手机APP或小程序查看盆栽和花草的状态并实时发送浇水指令。
同时,该系统还具备缺水报警功能,使照料植物轻松化,智能化。
【总页数】2页(P59-60)
【作者】饶容荣;东鑫渊
【作者单位】西安思源学院工学院
【正文语种】中文
【中图分类】TP27
【相关文献】
1.基于智能手机的电脑远程控制系统设计
2.基于智能手机服务菜单的远程控制系统设计
3.基于智能手机的电脑远程控制系统设计
4.一种基于LORA的LED智能照明远程控制系统设计
5.一种双膜双结构新型蔬菜大棚智能远程控制系统设计与实现
因版权原因,仅展示原文概要,查看原文内容请购买。
智能自动灌溉系统电路设计
智能自动灌溉系统电路设计殷丽艳【摘要】以单片机为基础,设计了一个智能自动灌溉系统.本系统由温湿度采集模块、单片机主控模块、LCD液晶显示模块、系统报警模块、供水模块等组成,是一个集信息采集、单片机控制、显示、报警和供水于一体的温室大棚智能自动灌溉系统.根据实验结果表明,该系统可以满足灌溉工作要求,合理化地对农作物进行灌溉,节约用水,达到增产的效果.【期刊名称】《电脑与电信》【年(卷),期】2018(000)005【总页数】3页(P1-3)【关键词】单片机;传感器;智能灌溉【作者】殷丽艳【作者单位】中北大学信息商务学院,山西晋中 030600【正文语种】中文【中图分类】TN9121 引言随着农林业的发展,为了解决普通农户的温室大棚生产管理中的节水灌溉和人力消耗等问题,智能灌溉系统应运而生。
由于目前水源不足严重影响人类的生产和生活[1],传统的灌溉方式已无法适应市场需求,减少水资源的浪费亟待解决。
现代智能型微机控制灌溉系统正在逐渐推广[2-5],它是集传感器、通讯、计算机等技术于一体的理论系统,能够有效解决传统灌溉中水资源浪费的问题。
因而,本文设计了一个智能自动灌溉系统,它可以根据实际情况进行智能自动化的灌溉,实现智能自动灌溉的目的。
该系统的优势在于节省人力,更是可以达到节约用水的目的,具有良好的推广应用价值。
2 设计目标与系统整体方案设计本设计是以基于单片机智能浇灌系统的工作原理为参考,它由大棚内的温湿度采集模块、单片机主控模块、LCD液晶显示模块、系统报警模块、供水模块构成。
这是一个集信息采集、单片机控制、显示、报警和供水于一体的温室大棚智能自动灌溉系统。
本设计的整体方案不仅要有智能自动方式[7-8],还需要有手动按键方式,在传感器部分出现故障后可通过按键操作继续进行灌溉,而不受制于其它模块。
在智能自动灌溉的模式下,首先我们需要设定大棚内的适宜农作物生长的正常温湿度范围,其次将大棚内温湿度采集模块采集到的实际温湿度值通过数据处理后输送到单片机内,在温度值高于预设温度最高值时,或者低于预设湿度最低值时,单片机主控模块将会同时给供水模块和报警模块发出灌溉和报警的指令,直到温湿度采集模块采集到的信息回到设定的温度范围,单片机主控模块才会给供水模块和报警模块发出停止工作的指令。
园艺陶瓷的智能控制系统设计考核试卷
5.在智能灌溉系统中,______负责根据土壤湿度数据自动调节灌溉。()
6.______是用于评估智能控制系统性能的重要指标之一。()
7.为了保护智能控制系统中的数据安全,可以采用______技术进行数据加密。()
8.______是智能控制系统中用于存储大量数据的常见设备。()
A.通信协议
B.数据格式
C.硬件接口
D.软件兼容性
18.以下哪些设备可以用于监测园艺陶瓷智能控制系统的能源消耗?()
A.电能表
B.电流互感器
C.热能计
D.负载监测器
19.以下哪些技术可以用于园艺陶瓷智能控制系统中的图像识别?()
A.深度学习
B.计算机视觉
C.图像处理
D.以上都是
20.以下哪些因素会影响园艺陶瓷智能控制系统的可扩展性?()
A.界面友好性
B.操作简便性
C.系统响应速度
D.系统外观设计
6.以下哪些设备可以通过无线方式连接到园艺陶瓷智能控制系统?()
A.智能手机
B.平板电脑
C.个人电脑
D.控制面板
7.以下哪些传感器可以用于监测园艺陶瓷中的环境状况?()
A.温度传感器
B.湿度传感器
C.光照传感器
D. CO2传感器
8.在智能控制系统中,以下哪些组件可以用于执行控制命令?()
B.执行器
C.传感器
D.通信模块
15.以下哪种编程语言适用于园艺陶瓷智能控制系统的开发?()
A. Python
B. Java
C. C#
D.以上都是
16.以下哪个不是园艺陶瓷智能控制系统中使用的通信协议?()
基于STM32的模拟智能灌溉系统设计

基于STM32的模拟智能灌溉系统设计
蓝丽金
【期刊名称】《数字技术与应用》
【年(卷),期】2015(000)012
【摘要】针对传统大棚灌溉方式可靠性差、水资源浪费严重、耗时耗力以及现有灌溉系统的时效性差、设计复杂等一系列问题,提出了一种基于STM32为核心控制器的新型智能灌溉系统,该系统围绕着控制器采集多路土壤湿度展开,以PC端为上位机进行远程控制,手机端接收GSM模块发送的土壤湿度信息,直观地监测大棚温湿度等信息,构成主从一体化的崭新监控模式。
【总页数】2页(P163-164)
【作者】蓝丽金
【作者单位】福州大学至诚学院福建福州350001
【正文语种】中文
【中图分类】TP36
【相关文献】
1.基于 STM32和 HC-SR501智能家居的智能照明系统设计 [J], 王东;莫先
2.基于STM32的温室大棚灌溉视频控制系统设计 [J], 王蕾;崔丽霞
3.基于STM32模拟智能导游机器人系统设计 [J], 蓝丽金;潘运丹;李君弋
4.基于STM32的模拟智能灌溉系统设计 [J], 蓝丽金
5.基于STM32模拟智能导游机器人系统设计 [J], 蓝丽金;潘运丹;李君弋
因版权原因,仅展示原文概要,查看原文内容请购买。
一种智能云灌溉系统

一种智能云灌溉系统
何江
【期刊名称】《节水灌溉》
【年(卷),期】2017(0)3
【摘要】为了提高精细化种植的用水效率,设计并实现了一种基于Raspberry Pi II 的智能云灌溉系统。
系统能够实时采集空气温湿度及土壤湿度的信息,通过模糊运算控制器输出合适的灌水量。
利用Raspberry Pi II强大的运行能力,把目前在互联网界流行的Python,flask等web技术用到了本系统,实现了web平台的远程手动控制和自动控制及数据监控,电脑、手机和平板均可以通过局域网或互联网访问和控制,真正把该系统变成了一个集控制、运算、数据储存的"云"平台。
该系统运行可靠,界面友好,对智能精准灌溉系统的设计具有一定的参考价值。
【总页数】3页(P97-99)
【关键词】智能灌溉;树莓派;物联网;模糊控制
【作者】何江
【作者单位】兰州理工大学机电工程学院
【正文语种】中文
【中图分类】S275;TP273
【相关文献】
1.基于云架构的圣世信通智能灌溉系统 [J], 刘蕊
2.一种新型太阳能集水蓄水智能化微润灌溉系统 [J], 傅秋艳; 刘何俊; 杨金广
3.一种智能抽水灌溉系统的设计 [J], 孙伟刚;张发菊;沈月娟;刘悦婷
4.基于树莓派的智能云灌溉系统设计 [J], 黄金秋;魁艺于;寇耀文;高伊慧;陈堃;刘燕;陈兴文
5.一种智能抽水灌溉系统的设计 [J], 孙伟刚;张发菊;沈月娟;刘悦婷
因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
}
unsigned char Read_Ds1302 ( unsigned char address )
{
unsigned char i,temp=0X00,dat1,dat2;
RST=0;
_nop_();
SCK=0;
_nop_();
RST=1;
_nop_();
{
if(P30==0)
{
Delay5ms();
if(P30==0)
{
handle=~handle;
}
while(!P30);
}
else if(P31==0)
{
Delay5ms();
if(P31==0)
{
if(handle==0)set=~set;
if(handle==1)warn=~warn;
{
if(irri==1)
{P2=0XA0; P0=0X10;}
else
{P2=0XA0; P0=0X00;}
}
else if((humi<hold)&&(warn==1))
{
if(irri==1)
{P2=0XA0; P0=0X50;}
else
{P2=0XA0; P0=0X40;}
}
else if(humi>hold)
{
if(irri==1)
{P2=0XA0; P0=0X10;}
else
{P2=0XA0; P0=0X00;}
}
}
display(one,two,three,four,five,six,seven,eight);
}
}
void keyscan()
void Write_Ds1302( unsigned char address,unsigned char dat )
{
RST=0;
_nop_();
SCK=0;
_nop_();
RST=1;
_nop_();
Write_Ds1302_Byte(address);
Write_Ds1302_Byte((dat/10<<4)|(dat%10));
{
P2=0XC0; P0=0X01; P2=0XE0;P0=tab[one]; Delay1ms();
P2=0XC0; P0=0X02; P2=0XE0;P0=tab[two]; Delay1ms();
P2=0XC0; P0=0X04; P2=0XE0;P0=tab[three]; Delay1ms();
if(SD)
{
dat|=0X01;
}
SCL=0;
}
return daБайду номын сангаас;
}
uchar ADRead(uchar add)
{
uchar date;
iicstart();
iicwritebyte(0X90);
{
P2=0X80;P0=0XFD;
one=time[2]/10;two=time[2]%10;three=10;four=time[1]/10;five=time[1]%10;six=11;seven=humi/10;eight=humi%10;
if((humi<hold)&&(warn==0))
}
while(!P31);
}
else if(P32==0)
{
Delay5ms();
if(P32==0)
{
if((handle==0)&&(set==1))inc=1;
if(handle==1)irri=1;
}
while(!P32);
}
else if(P33==0)
Write_Ds1302_Byte(address);
for (i=0;i<8;i++)
{
SCK=0;
temp>>=1;
if(SDA)
temp|=0x80;
SCK=1;
}
RST=0;
_nop_();
RST=0;
SCK=0;
_nop_();
SCK=1;
P2=0XC0; P0=0XFF;
P2=0XE0; P0=0XFF;
}
void Delay1ms() //@11.0592MHz
{
unsigned char i, j;
_nop_();
_nop_();
_nop_();
i = 11;
j = 190;
do
{
while (--j);
for(i=0;i<7;i++)
{
Write_Ds1302(add,ds[i]);
add=add+2;
}
Write_Ds1302(0X8E,0X80);
}
void dsget()
{
uchar i,add=0X81;
Write_Ds1302(0X8E,0X00);
for(i=0;i<7;i++)
{
SCL=0;
SD=dat&0X80;
SCL=1;
dat<<=1;
}
SCL=0;
}
uchar iicreadbyte()
{
uchar i,dat;
for(i=0;i<8;i++)
{
SCL=1;
iicdelay(5);
dat<<=1;
uchar one,two,three,four,five,six,seven,eight;
uchar code ds[]={0,30,8,1,1,1,17};
uchar time[7];
uchar humi,hold=50;
bit handle=0,set=0,inc,dec,warn=1,irri=0;
void Delay1ms();
void Delay5ms();
void allinit();
void keyscan();
void display(uchar one,uchar two,uchar three,uchar four,uchar five,uchar six,uchar seven,uchar eight);
P2=0XC0; P0=0X40; P2=0XE0;P0=tab[seven]; Delay1ms();
P2=0XC0; P0=0X80; P2=0XE0;P0=tab[eight]; Delay1ms();
}
void allinit()
{
P2=0XA0; P0=0X00;
P2=0X80; P0=0XFF;
{
time[i]=Read_Ds1302 ( add );
add=add+2;
}
Write_Ds1302(0X8E,0X80);
}
void display(uchar one,uchar two,uchar three,uchar four,uchar five,uchar six,uchar seven,uchar eight)
}
void iicstart()
{
SD=1;
_nop_();
SCL=1;
_nop_();
SD=0;
_nop_();
SCL=0;
_nop_();
}
void iicstop()
{
SD=0;
_nop_();
SCL=1;
_nop_();
SD=1;
_nop_();
}
{
if(inc==1)
{inc=0;hold=hold+1;}
if(dec==1)
{dec=0;hold=hold-1;}
one=10;two=10;three=11;four=11;five=11;six=11;seven=hold/10;eight=hold%10;
}
}
else if(handle==1)
{
P2=0X80;P0=0XFE;
if(set==0)
{
one=time[2]/10;two=time[2]%10;three=10;four=time[1]/10;
five=time[1]%10;six=11;seven=humi/10;eight=humi%10;
}
else if(set==1)
P2=0XC0; P0=0X08; P2=0XE0;P0=tab[four]; Delay1ms();
P2=0XC0; P0=0X10; P2=0XE0;P0=tab[five]; Delay1ms();
P2=0XC0; P0=0X20; P2=0XE0;P0=tab[six]; Delay1ms();
void dsinit();
void dsget();