速度控制模式
台达伺服样本

中达电通公司版权所有如有改动,恕不另行通知型录编码:ASD13I201504 创变新未来共创智能绿生活台达 交流伺服系统ASDA-A2系列绵密网络 专业服务中达电通已建立了48个分支机构及服务网点,并塑建训练有素的专业团队,提供客户最满意的服务,公司技术人员能在2小时内回应您的问题,并在48小时内提供所需服务。
地址:上海市浦东新区民夏路238号邮编:201209电话:(021)5863-5678传真:(021)5863-0003网址: 400 - 820 - 9595上海电话:(021)6301-2827传真:(021)6301-2307武汉电话:(027)8544-8265传真:(027)8544-9500济南电话:(0531)8690-7277传真:(0531)8690-7099乌鲁木齐电话:(0991)6118-160传真:(0991)6118-289沈阳电话:(024)2334-1160传真:(024)2334-1163南昌电话:(0791)8625-5010传真:(0791)8626-7603长沙电话:(0731)8827-7881传真:(0731)8827-7882郑州电话:(0371)6384-2772传真:(0371)6384-2656西安电话:(029)8669-0780传真:(029)86690780-8000长春电话:(0431)8859-6017传真:(0431)8892-5345合肥电话:(0551)6281-6777传真:(0551)6281-6555南宁电话:(0771)5875-699传真:(0771)2621-502北京电话:(010)8225-3225传真:(010)8225-1360成都电话:(028)8434-2072传真:(028)8434-2073南京电话:(025)8334-6585传真:(025)8334-6554厦门电话:(0592)5313-601传真:(0592)5313-628天津电话:(022)2301-5082传真:(022)2335-5006重庆电话:(023)8806-0306 传真:(023)8806-0776 杭州电话:(0571)8882-0610传真:(0571)8882-0603广州电话:(020)3879-2175传真:(020)3879-2178太原电话:(0351)4039-475传真:(0351)4039-047哈尔滨电话:(0451)5366-5568传真:(0451)5366-0248u可藉由CN7中两个专属DI或外接编码器来实现高速位置抓取功能u内置STO,符合IEC61508、SIL2;IEC62061、SILCL2及 ISO13849-1、Cat. 3 PL=d规范u支持220V及400V供电形式,机种广泛u支持全闭环控制u支持绝对型及增量型ECMA系列伺服电机ASDA A2-E高端伺服驱动器产品简介ASDA A2-E 是台达高阶的交流伺服驱动器,兼具ASDA-A2系列的优点及EtherCAT通讯接口,符合IEC61158及IEC61800-7,在高端应用中达到更快、更及时、更精确的性能表现。
第3讲 测速及速度控制模式
Contents
1 3
测速原理及技术 速度控制模式
2
1. 测速原理及技术
1.1 测速的作用
城市轨道交通中的列车速度信息在ATC系 统中具有重要的地位。
对列车的控制需要检测列车的速度,并由即时 速度测算出列车位置,将这些信息汇集到控制 中心。 控制中心根据线路上的列车流量的情况,生成 对车流中各列车和地面设备的控制命令。
多普勒雷达测速
在车头位置安装多普勒雷达,雷达向地面发送一定 频率的信号,并检测反射回来的信号。由于列车的运动
会产生多普勒效应,所以检测的信号频率与发射的信号
频率是不完全相同的。如果列车在前进状态,反射的信 号频率高于发射信号频率;反之,则低于发射信号频率。 而且,列车的运行速度越快,两个信号之间的频率差越 大。通过测量两个信号之间的频率差就可以获取列车的
率以下),设备就可以报警或自动停车。
测速发电机工作原理
测速发电机所产生的频率
ƒ=
1 3 .6
×
V Z D
频率-电压变换原理
多 谐 发电机 振 荡 器 微 分 电 路 单 稳 态 电 路 形 整 平 滑 电 路 去 比 较 电 路
测速发电机工作原理
脉冲速度传感器OPG
采用霍尔效应原理实现的一种测速方法。其基本原
磁钢片
霍尔元件
铝盘
在机车动轮轴头的顶
端,传感器探头安装 在轴箱盖上。
多普勒雷达测速
利用多普勒效应测量列车的运行速度。 多普勒效应(Doppler effect)是为纪念奥地利物理学 家及数学家克里斯琴·约翰·多普勒(Christian Johann Doppler)而命名的,他于1842年首先提出了这一理论。多普
测速发电机工作原理
松下伺服驱动器速度模式和位置模式的区别
松下伺服驱动器速度模式和位置模式的区别2008-05-16 20:39:10| 分类:默认分类|字号订阅一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。
一、速度控制和转矩控制都是用模拟量来控制的。
二、位置控制是通过发脉冲(数字量)来控制的。
如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。
如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。
如果上位控制器有比较好的闭环控制功能,用速度控制效果会好一点。
如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。
就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。
1、转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。
应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。
2、位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。
由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。
应用领域如数控机床、印刷机械等等。
3、速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。
位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的定位精度。
动车组分级速度控制方式
动车组分级速度控制方式主要有以下几种:
- 超前式分级速度控制:又称为出口速度控制方式,给定列车的出口速度值,控制列车速度不超过该值。
司机在驾驶列车驶出每一个闭塞分区入口前,须将速度降至速度控制线以下,否则就会引发紧急制动。
- 滞后式分级速度控制:又称入口速度控制方式,即控制列车在本闭塞分区的速度不超过下一闭塞分区的入口速度值。
司机若驾驶列车超过了该给定值,就会引发紧急制动。
- 曲线式分级速度控制:与前两种略有不同。
该种控制方式并不是在闭塞分区出口或入口设定速度限制,而是在整个闭塞分区给出速度控制曲线。
司机在驾驶列车时,不可以越过速度控制曲线。
伺服驱动器控制模式的接线及其注意事项
伺服驱动器控制模式的接线及其注意事项我们在平时控制伺服电机的时候,经常用到的控制模式就是三种模式分别是速度控制模式、位置控制模式、转矩控制模式。
现以三菱的伺服驱动器为例,下面分别了解一下每个模式的控制接线及其注意事项。
一、速度控制模式注1.为了防止触电,请务必将伺服放大器的保护接地(PE)端子(带记号的端子)连接到控制柜的保护接地(PE)上。
2.请正确连接二极管方向。
连接错误,可能会出现伺服放大器发生故障不能输出信号,EM2(强制停止2)等的保护电路不能动作的情况。
3.运行时,请务必将EM2(强制停止2)信号保持ON状态。
(B接点)4.请从外部供给接口用DC24V±10%500mA电源。
500mA是使用全部输出信号时的值。
通过减少输入输出点数能够降低电流容量。
请参考3.9.2项(1)记载的接口需要的电流。
5.运行时请务必将EM2(强制停止2)、LSP(正转行程末端)以及LSN(反正行程末端)ON。
(B接点)6.ALM(故障)在未发生报警的正常情况下ON。
7.同样名称的信号在伺服放大器内部是联通的。
8.在[Pr.PD03]~[Pr.PD22]设置能够使用TL(外部转矩限制选择)时,即可使用TLA。
9.请使用SW1DNC-MRC2-E。
10.使用CN3连接器的RS-422通信(计划应用)能够和个人电脑连接。
但是,USB通信功能(CN5连接器)和RS-422通信功能(CN3连接器)是互斥的。
不能同时使用。
11.输入负电压时,请使用外部电源。
12.漏型输入输出接口的情况。
13.不使用STO功能时,请在伺服放大器上安装附属的短路连接器。
14.为了防止伺服电机出现预期以外的再启动,在创建电路时,应设置成主电路电源OFF时EM2同时OFF。
二、位置控制模式注1.为了防止触电,请务必将伺服放大器的保护接地(PE)端子(带记号的端子)连接到控制柜的保护接地(PE)上。
2.请正确连接二极管方向。
连接错误,可能会出现伺服放大器发生故障不能输出信号,EM2(强制停止2)等的保护电路不能动作的情况。
车速控制
310-03-1 车速控制310-03-1章节310-03 车速控制适用车辆:2005 Focus目录页数说明与操作车速控制 ................................................................................................................................. 310-03-2 诊断与测试车速控制 ................................................................................................................................. 310-03-6 检查与确认............................................................................................................................. 310-03-6诊断故障码(DTC) 索引........................................................................................................ 310-03-6拆卸与安装速度控制开关.......................................................................................................................... 310-03-15说明与操作车速控制速度控制系统,是经由方向盘的5个开关来操作,它们的功能是:速度控制模块提供讯号至作动器,作动器通过内部齿轮传动和作动器拉索来作动节气门。
欧瑞张力控制使用手册

1~10000
500
√
选择初始卷径的输入通道。 0:由 Fb23 或 Fb25~Fb28 可数字设定初始卷径。 1、2、3: 初始卷径通过模拟量来确定,选择模拟量输入的不同的端口。 说明:卷径的起始值可以通过两个多功能端子来确定。初始卷径选择关系如下:
初始卷径选择端子 2 0
初始卷径选择端子 1 0
第四章 功能码表...................................................16
1
张力控制使用手册 第一章 概述
本手册仅介绍与张力控制有关的部分,其他的基本功能请参考相关《操作说明书》。本手册需与 相关《操作说明书》配合使用。
张力控制变频器主要适用于造纸、纺织、印染、纤维、橡胶等需要实现恒张力的行业。卷曲类控 制是其典型的应用,使用张力控制可以自动计算卷径,在卷径变化时仍能够获得恒张力效果。
7
张力控制使用手册
Fb23
卷轴卷径(mm)
1~Fb22
100
√
设置卷轴的半径,关于卷径的计算结果不能小于卷轴卷径。若因为参数设定不当,变频器自身计算
卷径低于此值时,受该参数的限制。
0:Fb23 或 Fb25~Fb28 设定
Fb24
初始卷径源
1:AI1 2:AI2
0
×
3:AI3
Fb25
放卷初始卷径(mm)
0
0
0
1
1
0
1
1
材料厚度选择端子。
Fb37
材料厚度 0(mm)
0.01~50.00
Fb38
材料厚度 1(mm)
0.01~50.00
0
√
材料厚度 Fb37 Fb38 Fb39 Fb40
变频器与伺服应用习题答案第5章机工

习题P2185.1图1所示为伺服控制系统组成原理图,它包括控制器、伺服驱动器、伺服电机和位置检测反馈元件。
伺服驱动器通过执行控制器的指令来控制伺服电机,进而驱动机械装备的运动部件(这里指的是丝杠工作台),实现对装备的速度、转矩和位置控制。
图1 伺服控制系统组成原理图从自动控制理论的角度来分析,伺服控制系统一般包括控制器、被控对象、执行环节、检测环节、比较环节等五部分。
(1)比较环节比较环节是将输入的指令信号与系统的反馈信号进行比较,以获得输出与输入间的偏差信号的环节,通常由专门的电路或计算机来实现。
(2)控制器控制器通常是PLC、计算机或PID控制电路,其主要任务是对比较元件输出的偏差信号进行变换处理,以控制执行元件按要求动作。
(3)执行环节执行环节的作用是按控制信号的要求,将输入的各种形式的能量转化成机械能,驱动被控对象工作,这里一般指各种电机、液压、气动伺服机构等。
(4)被控对象机械参数量包括位移、速度、加速度、力、力矩为被控对象。
(5)检测环节检测环节是指能够对输出进行测量并转换成比较环节所需要的量纲的装置,一般包括传感器和转换电路。
5.2交流伺服驱动器中一般都包含有位置回路、速度回路和转矩回路,但使用时可将驱动器、电机和运动控制器结合起来组合成不同的工作模式,以满足不同的应用要求。
伺服驱动器主要有速度控制、转矩控制和位置控制等三种模式。
(1)速度控制模式图2所示的伺服驱动器的速度控制采取跟变频调速一致的方式进行,即通过控制输出电源的频率来对电动机进行调速。
此时,伺服电机工作在速度控制闭环,编码器会将速度信号检测反馈到伺服驱动器,跟设定信号(如多段速、电位器设定等)进行比较,然后进行速度PID控制。
图2 速度控制模式(2)转矩控制模式图3所示的伺服驱动器转矩控制模式是通过外部模拟量输入来控制伺服电机的输出转矩。
图3 转矩控制模式(3)位置控制模式图4所示的驱动器位置控制模式可以接受PLC或定位模块等运动控制器送来的位置指令信号。
MD330恒线速度控制模式收卷典型应用
MD330恒线速度控制模式收卷典型应⽤MD330恒线恒线速度控制模式速度控制模式速度控制模式收收卷典型应⽤⼀. 闭环速度闭环速度控制控制控制模式简介模式简介MD330参数设置及调试需要《MD330张⼒控制专⽤变频器⽤户⼿册》与《MD320⽤户⼿册》结合使⽤。
前者仅介绍与卷曲张⼒控制有关的部分,其他的基本功能请参考后者来设置。
当张⼒控制模式选为⽆效(FH-00=0)时,变频器的功能与MD320完全相同。
MD330⽤于卷曲控制,可以⾃动计算卷径,在卷径变化时仍能够获得恒张⼒效果。
在没有卷径变化的场合实现恒转矩控制,建议使⽤MD320或MD380变频器。
选⽤张⼒控制模式后,变频器的输出频率和转矩由张⼒控制功能⾃动产⽣,F0组中频率源的选择将不起作⽤。
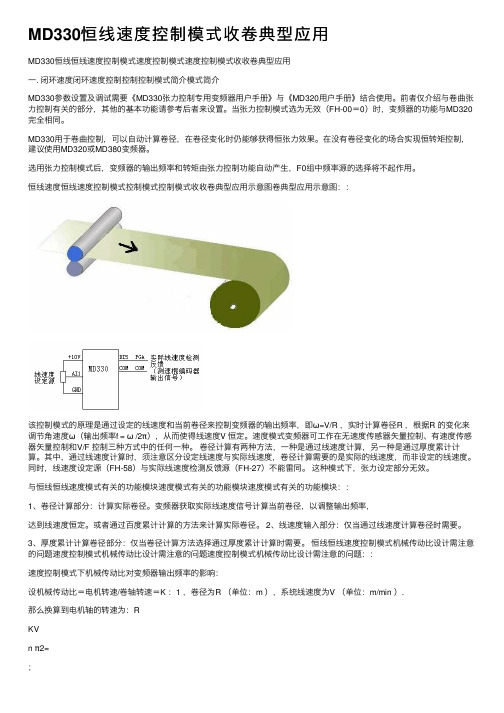
恒线速度恒线速度控制模式控制模式控制模式收收卷典型应⽤⽰意图卷典型应⽤⽰意图::该控制模式的原理是通过设定的线速度和当前卷径来控制变频器的输出频率,即ω=V/R ,实时计算卷径R ,根据R 的变化来调节⾓速度ω(输出频率f = ω /2π),从⽽使得线速度V 恒定。
速度模式变频器可⼯作在⽆速度传感器⽮量控制、有速度传感器⽮量控制和V/F 控制三种⽅式中的任何⼀种。
卷径计算有两种⽅法,⼀种是通过线速度计算,另⼀种是通过厚度累计计算。
其中,通过线速度计算时,须注意区分设定线速度与实际线速度,卷径计算需要的是实际的线速度,⽽⾮设定的线速度。
同时,线速度设定源(FH-58)与实际线速度检测反馈源(FH-27)不能雷同。
这种模式下,张⼒设定部分⽆效。
与恒线恒线速度模式有关的功能模块速度模式有关的功能模块速度模式有关的功能模块::1、卷径计算部分:计算实际卷径。
变频器获取实际线速度信号计算当前卷径,以调整输出频率,达到线速度恒定。
或者通过百度累计计算的⽅法来计算实际卷径。
2、线速度输⼊部分:仅当通过线速度计算卷径时需要。
3、厚度累计计算卷径部分:仅当卷径计算⽅法选择通过厚度累计计算时需要。
AMK伺服系统使用说明书

A M K伺服系统使用说明书(总60页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--AMK伺服系统使用说明书目录系统简介————————————————1电源模块————————————————9驱动模块————————————————15控制面板————————————————24参数配置————————————————30故障诊断————————————————046附录:参数列表一、系统简介1.伺服电机AMK伺服电动机分DH、DS、DT、DV和DW等系列,其编码器分为旋转变压器型编码器(R)、HiperFace接口型编码器(S/T)、EnData接口型编码器(E/F)和增量型编码器(I)。
其中,旋转变压器型编码器通过DB9型插头连接到KW驱动器的X130接口;其他型号的编码器通过DB15型插头连接到KW驱动器的X131接口。
AMK伺服电动机编码器接口引脚功能表KW驱动器编码器接口引脚功能表AMK伺服电机的动力接线也采用航空插头的接线方式,其根据电机功率大小采用的插头大小不同,但其动力电缆的引脚分布基本相同。
AMK电机动力接口引脚功能表引脚功能引脚功能PE A热敏电阻1U B热敏电阻4V C抱闸3W D抱闸AMK伺服电机型号定义1)DW液体冷却主轴电机DW系列液体冷却三相异步电机在高功率时也有紧凑的结构,恒功率调速范围为1:3,额定功率可高达28kW,额定力矩可高达,重载型设计和加强型轴承允许高径向载荷。
DW伺服电机型号定义及名牌数据2)DS系列同步伺服电机DS系列同步伺服电机具有结构紧凑,高动态响应,调速范围宽等特点。
这些无刷的永磁交流伺服电机,是4极的或6极的。
DS系列伺服电机型号定义及名牌数据3)DV系列伺服电机DV系列伺服电机是坚固的感应式异步交流电机,不会消磁,具有较高的过载能力和平稳的运行特性。
DV伺服电机在从0加速到额定速度的过程中提供的几乎是恒定转矩,最高转速可扩展至10000r/min,力矩范围为。
速度控制与张力控制

精心整理张力控制1.什么是张力控制:所谓的张力控制,通俗点讲就是要能控制电机输出多大的力,即输出多少牛顿。
反应到电机轴即能控制电机的输出转距。
2.3.2.真正的张力控制不同于靠前后两个动力点的速度差形成张力的系统,靠速度差来调节张力的实质是对张力的PID控制,要加张力传感器。
而且在大小卷启动、停止、加速、减速、停车时的调节不可能做到象真正的张力控制的效果,张力不是很稳定。
肯定会影响生产出产品的质量。
4.5.用变频器做恒张力控制的实质是死循环矢量控制,即加编码器反馈。
对收卷来说,收卷的卷经是由小到大变化的,为了保证恒张力,所以要求电机的输出转距要由小到大变化。
同时在不同的操作过程,要进行相应的转距补偿。
即小卷启动的瞬间,加速,减速,停车,大卷启动时,要在不同卷经时进行不同的转距补偿,这样就能使得收卷的整个过程很稳定,避免小卷时张力过大;大卷启动时松纱的现象。
6.7.二.张力控制变频收卷在纺织行业的应用及工艺要求8.9.1.传统收卷装置的弊端10.纺织机械如:浆纱机、浆染联合机、并轴机等设备都会有收卷的环节。
传统的收卷都是采用机械传动,因为机械的同轴传动对于机械的磨损是非常严重的,据了解,用于同轴传动部分的机械平均寿命基本上是一年左右。
而且经常要维护,维护的时候也是非常麻烦的,不仅浪费人力而且维护费用很高,给客户带来了很多的不便。
尤其是纺织设备基本上是开机后不允许中途停车的,如发生意外情况需要停车会造成很大的浪费。
在这种情况下,张力控制变频收卷开始逐渐取代传统的机械传动系统。
11.12.2.张力控制变频收卷的工艺要求13.*在收卷的整个过程中都保持恒定的张力。
张力的单位为:牛顿或公斤力。
14.*在启动小卷时,不能因为张力过大而断纱;大卷启动时不能松纱。
15.*在加速、减速、停止的状态下也不能有上述情况出现。
16.*要求将张力量化,即能设定张力的大小(力的单位),能显示实际卷径的大小。
17.18.3.张力控制变频收卷的优点19.*张力设定在人机上设定,人性化的操作,单位为力的单位:牛顿.20.*使用先进的控制算法:卷径的递归运算;空心卷径激活时张力的线性递加;21.张力锥度计算公式的应用;转矩补偿的动态调整等等.22.*卷径的实时计算,精确度非常高,保证收卷电机输出转矩的平滑性能好。
松下伺服驱动器速度模式和位置模式的区别
松下伺服驱动器速度模式和位置模式的区别2008-05-16 20:39:10| 分类:默认分类|字号订阅一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式。
一、速度控制和转矩控制都是用模拟量来控制的。
二、位置控制是通过发脉冲(数字量)来控制的。
如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。
如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。
如果上位控制器有比较好的闭环控制功能,用速度控制效果会好一点。
如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。
就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。
1、转矩控制:转矩控制方式是通过外部模拟量的输入或直接的地址的赋值来设定电机轴对外的输出转矩的大小,可以通过即时的改变模拟量的设定来改变设定的力矩大小,也可通过通讯方式改变对应的地址的数值来实现。
应用主要在对材质的受力有严格要求的缠绕和放卷的装置中,例如饶线装置或拉光纤设备,转矩的设定要根据缠绕的半径的变化随时更改以确保材质的受力不会随着缠绕半径的变化而改变。
2、位置控制:位置控制模式一般是通过外部输入的脉冲的频率来确定转动速度的大小,通过脉冲的个数来确定转动的角度,也有些伺服可以通过通讯方式直接对速度和位移进行赋值。
由于位置模式可以对速度和位置都有很严格的控制,所以一般应用于定位装置。
应用领域如数控机床、印刷机械等等。
3、速度模式:通过模拟量的输入或脉冲的频率都可以进行转动速度的控制,在有上位控制装置的外环PID控制时速度模式也可以进行定位,但必须把电机的位置信号或直接负载的位置信号给上位反馈以做运算用。
位置模式也支持直接负载外环检测位置信号,此时的电机轴端的编码器只检测电机转速,位置信号就由直接的最终负载端的检测装置来提供了,这样的优点在于可以减少中间传动过程中的误差,增加了整个系统的定位精度。
速度控制与张力控制

速度控制与张力控制精心整理张力控制1.什么是张力控制:所谓的张力控制,通俗点讲就是要能控制电机输出多大的力,即输出多少牛顿。
反应到电机轴即能控制电机的输出转距。
2.3.2.真正的张力控制不同于靠前后两个动力点的速度差形成张力的系统,靠速度差来调节张力的实质是对张力的PID控制,要加张力传感器。
而且在大小卷启动、停止、加速、减速、停车时的调节不可能做到象真正的张力控制的效果,张力不是很稳定。
肯定会影响生产出产品的质量。
4.5.用变频器做恒张力控制的实质是死循环矢量控制,即加编码器反馈。
对收卷来说,收卷的卷经是由小到大变化的,为了保证恒张力,所以要求电机的输出转距要由小到大变化。
同时在不同的操作过程,要进行相应的转距补偿。
即小卷启动的瞬间,加速,减速,停车,大卷启动时,要在不同卷经时进行不同的转距补偿,这样就能使得收卷的整个过程很稳定,避免小卷时张力过大;大卷启动时松纱的现象。
6.7.二.张力控制变频收卷在纺织行业的应用及工艺要求8.9.1.传统收卷装置的弊端10.纺织机械如:浆纱机、浆染联合机、并轴机等设备都会有收卷的环节。
传统的收卷都是采用机械传动,因为机械的同轴传动对于机械的磨损是非常严重的,据了解,用于同轴传动部分的机械平均寿命基本上是一年左右。
而且经常要维护,维护的时候也是非常麻烦的,不仅浪费人力而且维护费用很高,给客户带来了很多的不便。
尤其是纺织设备基本上是开机后不允许中途停车的,如发生意外情况需要停车会造成很大的浪费。
在这种情况下,张力控制变频收卷开始逐渐取代传统的机械传动系统。
11.12.2.张力控制变频收卷的工艺要求13.*在收卷的整个过程中都保持恒定的张力。
张力的单位为:牛顿或公斤力。
14.*在启动小卷时,不能因为张力过大而断纱;大卷启动时不能松纱。
15.*在加速、减速、停止的状态下也不能有上述情况出现。
16.*要求将张力量化,即能设定张力的大小(力的单位),能显示实际卷径的大小。
(完整word版)伺服控制的三种模式
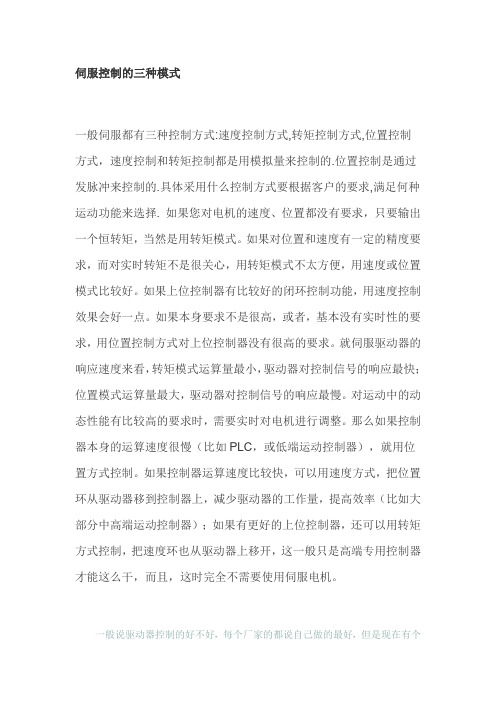
伺服控制的三种模式一般伺服都有三种控制方式:速度控制方式,转矩控制方式,位置控制方式,速度控制和转矩控制都是用模拟量来控制的.位置控制是通过发脉冲来控制的.具体采用什么控制方式要根据客户的要求,满足何种运动功能来选择. 如果您对电机的速度、位置都没有要求,只要输出一个恒转矩,当然是用转矩模式。
如果对位置和速度有一定的精度要求,而对实时转矩不是很关心,用转矩模式不太方便,用速度或位置模式比较好。
如果上位控制器有比较好的闭环控制功能,用速度控制效果会好一点。
如果本身要求不是很高,或者,基本没有实时性的要求,用位置控制方式对上位控制器没有很高的要求。
就伺服驱动器的响应速度来看,转矩模式运算量最小,驱动器对控制信号的响应最快;位置模式运算量最大,驱动器对控制信号的响应最慢。
对运动中的动态性能有比较高的要求时,需要实时对电机进行调整。
那么如果控制器本身的运算速度很慢(比如PLC,或低端运动控制器),就用位置方式控制。
如果控制器运算速度比较快,可以用速度方式,把位置环从驱动器移到控制器上,减少驱动器的工作量,提高效率(比如大部分中高端运动控制器);如果有更好的上位控制器,还可以用转矩方式控制,把速度环也从驱动器上移开,这一般只是高端专用控制器才能这么干,而且,这时完全不需要使用伺服电机。
一般说驱动器控制的好不好,每个厂家的都说自己做的最好,但是现在有个比较直观的比较方式,叫响应带宽。
当转矩控制或者速度控制时,通过脉冲发生器给他一个方波信号,使电机不断的正转、反转,不断的调高频率,示波器上显示的是个扫频信号,当包络线的顶点到达最高值的70.7%时,表示已经失步,此时的频率的高低,就能显示出谁的产品牛了,一般的电流环能作到1000Hz 以上,而速度环只能作到几十赫兹。
换一种比较专业的说法:运动伺服一般都是三环控制系统,从内到外依次是电流环速度环位置环。
1、首先电流环:电流环的输入是速度环PID调节后的那个输出,我们称为“电流环给定”吧,然后呢就是电流环的这个给定和“电流环的反馈”值进行比较后的差值在电流环内做PID调节输出给电机,“电流环的输出”就是电机的每相的相电流,“电流环的反馈”不是编码器的反馈而是在驱动器内部安装在每相的霍尔元件(磁场感应变为电流电压信号)反馈给电流环的。
力矩与速度控制模式知识讲座
讲座(二)变频器功能解析—电动机特性的控制功能作者:宜昌市自动化研究所张燕宾摘要:本文综述了变频器为了改善电动机的机械特性而设置的各种控制模式及其相关功能。
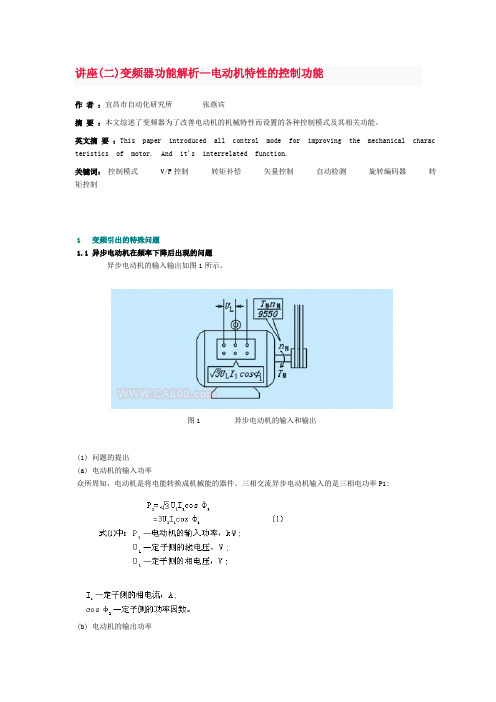
英文摘要:This paper introduced all control mode for improving the mechanical charac teristics of motor. And it's interrelated function.关键词:控制模式V/F控制转矩补偿矢量控制自动检测旋转编码器转矩控制1 变频引出的特殊问题1.1 异步电动机在频率下降后出现的问题异步电动机的输入输出如图1所示。
图1 异步电动机的输入和输出(1) 问题的提出(a) 电动机的输入功率众所周知,电动机是将电能转换成机械能的器件。
三相交流异步电动机输入的是三相电功率P1:(b) 电动机的输出功率电动机是用来拖动负载旋转的,因此,其输出功率便是轴上的机械功率:式(2)中: P2─电动机输出的机械功率,kW;TM─电动机轴上的转矩,N·m;nM─电动机轴上的转速,r/min。
(c) 频率下降后出现的问题毫无疑问,频率下降的结果是转速下降。
这是因为,异步电动机的转速和频率有关:式(4)中: n0—同步转速(即旋转磁场的转速), r/min。
由式(2)知, 转速下降的结果是:电动机的输出功率下降。
然而, 式(1)表明, 电动机的输入功率和频率之间却并无直接关系。
如果仔细分析的话,当频率下降时,输入功率将是有增无减的(因为反电动势将减小)。
输入不变而输出减少,这似乎有悖于能量守恒的原理,出现了什么问题呢?(2) 异步电动机的能量传递异步电动机的转子是依靠电磁感应(转子绕组切割旋转磁场)而得到能量的,如图2(a)所示。
所以,其能量是通过磁场来传递的。
传递过程如图2(b)所示, 可归纳如下:图2 异步电动机的能量传递(a) 从输入的电功率P1中扣除定子侧损失(定子绕组的铜损pCu1和定子铁心的铁损pFe1)后,便是通过磁场传递给转子的功率,称为电磁功率,用PM表示:(b) 转子得到的电磁功率PM中扣除转子侧损失(转子绕组的铜损PCu2和转子铁心的铁损PFe2),便是转子输出的机械功率P2:显然,频率下降的结果必将导致电磁功率PM的“中部崛起”,这意味着磁通的大量增加。
列车运行监控装置制动模式曲线—四显示自动闭塞区段的速度监控模式

连续控制模式计算公式
四显示连续控制模式,取 S f v0 , A=100,三个闭塞分区长度之和应
不小于反应距离、列车从最高速度到停车的制动距离和安全距离之和。
Sb1 Sb 2 Sb 3 S z S a S f S z 1.5v0 A
四显示自动闭塞区段的
速度监控模式
五、两种控制模式对比
连续控制模式与分级控制模式相比,同样的最
高速度可以节省减速的闭塞分区个数或减小闭
塞分区长度。
同样的闭塞分区个数或闭塞分区长度可以提高
列车的最高速度,并且列车过黄灯以及绿黄灯
的速度较高。
四显示自动闭塞区段的
速度监控模式
如果绿灯限速不能满足列车最高速度的需要,可
以增加信号显示序列,采用多显示自动闭塞系统
塞分区的长度满足从规定速度到停车的制动距离,可以越过绿黄灯后再开始减速;
黄灯是限速信号,列车越过黄灯时必须减速到规定的限速值,不然就不能保证在红
灯前停车。
随着列车速度的提高,列车通过绿黄灯的速度也不得不加以限制。
四显示自动闭塞区段
的速度监控模式
二、一个闭塞分区最高速度限制
闭塞分区长度计算
制动距离( )
绿黄灯和绿灯限速公式:
S b S z S f S z v0 (m)
(9 - 10)
(9 - 9)
四显示自动闭塞区段
的速度监控模式
绿灯和绿黄灯限速
绿黄灯限速的高低与黄灯限速和闭塞分区长度有关。
当列车最高速度过大时,又不能辨别最后一个绿灯,会产生绿灯限速。
绿灯限速的高低与绿黄灯限速和闭塞分区长度有关。(盘形制动旅客列车)
四显示自动闭塞区段
第八章 ATC系统

轨道交通列车运行控制系统组成示意图
ATS
定位 系统
ATO
ATP 测速传 感器
驱动、制动 控制设备
列车数据
6
列车控制系统ATC框图
7
三、ATC系统制式和分类
1.按地-车信息传输方式
(1)连续式列控系统 :车载设备可连续接收到地面列控设备的 车-地通信信息,是列控技术应用及发展的主流。连续式列控系统可 细分为阶梯速度控制方式和曲线速度控制方式。
一长度的闭塞分区,一个 分区只能被一列车占用;
常用制动速度曲 线
列车间隔是按后续列车在 当前速度下所需的制动距
实际速度曲线
离,加上安全余量计算和
控制的,确保不冒进前行
列车占用的闭塞分区; 制
动的起点是动态的,终点
是固定在某一分区的边界
处。
距离
保护距 离
14
三、ATC系统制式和分类——准移动闭塞
技术特点
查询应答器方法:查询应答器不仅物理安装位置固定,它还可以直接向 通过的列车发送本应答器所处的公里坐标。
轨道环线定位方法:轨道感应环线的两根电缆每隔一个轨道长度(100m) 要相互交叉一次,交叉回线将交变电信号送到沿钢轨线路铺设的交叉 回线上,在回线上产生交变电磁场,车载设备在经过每个交叉时能够 检测到信号相位的变化,当列车驶过一个交叉点时,利用信号相位的 变化引发地址码加1,由车载计算机根据地址码计算出列车的地理位置, 这样就可以用绝对地址信息对机车里程计产生的定位记录进行误差修 正,减少由于车轮滑行及空转造成的位置误差。
入口速度检查控制方式:列车在闭塞分区入口处接收到目标速度信号后 立即以此速度进行检查,一旦列车超速,则进行制动使列车速度降低到目 标速度以下。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
0G为前行列车所占用的 闭塞分区,为保证后续 列车在1G和0G的分界点 前停车,后续列车应在 速度控制曲线容许速度 下行驶、停车。该速度 控制曲线是根据列车的 目标速度、距目标点的 距离及列车自身重量、 长度、制动性能等参数 计算出来的。 当列车实际速度超过速 度控制曲线容许速度时 ,自动实施制动,列车 减速。列车速度低于容 许速度后,制动缓解。
V 速度控制曲线
列车运行曲线
5G
4G
3G 2G
1G
0G
采用速度——目标距离模式曲线控制方式,可以提高区 间通过能力,但需要从地面向列车传递更多的信息,除 了目标点速度信息外,还要有分区长度、坡度等信息。 线路参数可以通过地对车信息实时传输,也可以事先在 车载信号设备中存储,通过核对取得。因为给出的制动 速度控制曲线是一次连续的,需要一个制动距离内所有 的线路参数,地对车信息传输的信息量相当大,可以通 过无线通信、数字轨道电路、轨道电缆、应答器等地对 车信息传输设备传输。
第3章 列车运行控制的主要技术与方法
3.1 3.2 3.3
测速技术 列车定位技术
无线通信技术
3.4 3.5
闭塞方式
速度控制模式
速度控制模式
分级速度控制 速度——目标距离模式曲线控制
城市轨道交通中,对列车运行的控制不仅需要掌 握列车运行的即时速度信息,还需要结合从地面 设备、前行列车获得的信息和控制中心的命令, 科学、合理地控制列车的速度,确保在安全的前 提下实现最小列车运行间隔。 从列车速度控制的方式可以分为两种:分级速度 控制和速度——目标距离模式曲线控制两种。
V4 V3 V2
速度控制曲线
列车运行曲线
V1
5G
4G
3G
2G
1G
0Gቤተ መጻሕፍቲ ባይዱ
速度控制曲线
V4 V3 V2
列车运行曲线
超过入口速度的情况
V1
5G
4G
3G
2G
1G
0G
滞后速度控制方式,又称为入口速度控制方式,事先给出 列车进入某闭塞分区入口的速度值,监控列车在本闭塞分 区运行的速度不得超过给定的入口速度值,采取人控优先 的方法,在每个闭塞分区列车速度只要不超过给定的入口 速度值,就不会触碰滞后速度控制线。 但是考虑到一旦列车失控,在本闭塞分区的出口,即下一 闭塞分区入口处的速度超过了给定的入口速度值,碰撞了 滞后式速度控制线,即所谓的撞墙,此时触发设备自动引 发制动,列车必然会越过第一红灯进入下一闭塞分区,因 此有必要增加一个闭塞分区作为安全防护区段,俗称双红 灯防护。
V4 V3 V2
V1
2.速度——目标距离模式曲线控制
速度——目标距离模式曲线控制采取的制动模式 为连续式一次制动速度控制方式,根据目标距离 、目标速度及列车本身的性能确定列车制动曲线 ,不设定每个闭塞分区速度等级。连续式一次速 度控制模式,如果以前行列车占用的闭塞分区入 口为追踪目标点,则为准移动闭塞;若以前方列 车的尾部为追踪目标点,则为移动闭塞。
阶梯式分级速度控制
阶梯式分级速度控制方式不需要距离信息,只要 在停车信号与最高速度间增加若干中间速度信号 ,即可实现,因此需要传输信息量较少,设备相 对比较简单,又可分为超前式和滞后式。 一个闭塞分区的进入速度称为入口速度,驶离速 度称为出口速度。
超前速度控制方式,又称为出口速度控制方式,事先给出 各闭塞分区列车的出口速度值,控制列车行驶至在该闭塞 分区出口前不得超过该出口速度值。该速度控制方式采用 设备控制优先的方法,即列车驶出每个闭塞分区前均必须 将超前速度降至出口限制速度控制线以下,否则设备就会 自动启动制动,所以超前对出口速度进行了控制,不会冒 出闭塞分区。
1.分级速度控制
分级速度控制是以一个闭塞分区为单位,每个 闭塞分区设计一个目标速度,无论列车在该闭 塞分区中什么位置都需要根据限定的速度判定 列车是否超速。分级速度控制系统的列车追踪 间隔主要与闭塞分区的划分、列车的性能和速 度有关,而闭塞分区的长度是以最坏性能的列 车为依据并结合线路参数来确定的。 分级速度控制又可分为阶梯式和分段曲线式两 种。
曲线式分级速度控制
曲线式分级速度控制要求每个闭塞分区入口速 度和出口速度用曲线连接起来,形成一段连续 的控制曲线,曲线控制方式和阶梯控制方式一 样,每一个闭塞分区只给定一个目标速度。控 制曲线把闭塞分区允许速度的变化连续起来。
从最高速至零速的列车控制减速线为分段曲线组 成的一条曲线组合,列车实际减速运行线只要在 控制线以下就可以了,万一超速碰撞了了速度控 制线,设备自动引发制动。因为速度控制是连续 的,所以不会超速太多,紧急制动的停车点不会 冒出闭塞分区,可以不需增加一个闭塞分区作为 安全防护区段,设计时当然要考虑留有适当的安 速度控制曲线 全距离。