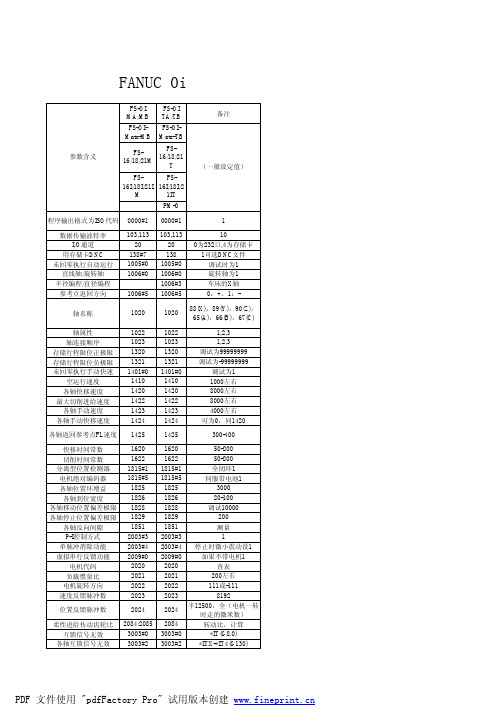
FANUC 0i 系统参数
FANUC 0i 系统参数
伺服参数:1020:轴号(88 89 90 ) 1013#1=0,IS—B设定1022 1023:轴名(1 2 3)1006#0#1=0,直线轴2020:电机号(代码)1815#1=1:使用分离脉冲编码器2021:负载惯量比3002#4=0,倍率相关的信号逻辑不变2165:放大器最大电流值1815#4=0的原因显示诊断310 311中2022:电机旋转方向(111 -111)20=4,138=7:存储卡加工有效2023: 速度脉冲数(8192)=快移速度/(60X增益)2024:位置脉冲数(12500 半闭环)全闭环:丝杠螺距/光栅尺分辨率2185:位置脉冲数转换系数(位置脉冲数〉32767时)2084:柔性进给齿轮比(分子)2085:柔性进给齿轮比(分母柔性齿轮比=电机旋转一周所需的位置脉冲/100万1010:CNC控制轴数8130:总控制轴数1820:指令倍乘比=(指令到位/检测单位)X21821:参考计数器容量1825:各轴伺服环增益1826:各轴到位宽度1827:各轴到位宽度(切削进给)1801#4:CCI切削进给时的到位宽度0:使用1826 1:专用18271828:移动中最大偏差1829:停止时最大偏差1850:栅格偏移量或参考点偏移量2000#0=1,使参数(2023 2024)的值增大10倍#1=0,进行数字伺服参数的初始设定1803#1,是否在到位极限中进行停止/移动中误差过大的检查0:进行1:不进行1804#4:在VRDY OFF忽略信号处于1的状态执行紧急停止时0:为0之前不会解除紧急停止1:解除#5=0:在检测异常负载情况下使所有轴停止并报警#6:当VRDY OFF报警忽略为1或各轴VRDY OFF为1时(0:伺服准备就绪信号SA为0 1:SA=1)1311#0=1:刚通电后的存储行程限位检测有效1300#6=0:进行手动回零前存储行程检测(1311#0=1时)1301#6=0:超程信号不向PMC输入#7:是否进行移动前行程检测0:不进行1:进行3111#0=1:显示伺服设定画面3111#5=1:予以进行操作监视显示#6=1:操作监视画面的速度表上是主轴速度0:主轴电机速度3160:MDI单元类别设定3202#0 NE8=1,禁止8000—8999程序编辑#4=1 NE9 禁止9000-9999程序编辑#6使受到保护的程序的号检索0:无效1:有效3290#7:存储器保护信号0:使用KEY1、2、3、4信号(G46。
FANUC系统参数

FANUC 系统参数
系统参数不正确也会使系统报警。
另外,工作中常常遇到工作台不能回到零点、位置显示值不对或是用MDI键盘不能输入刀偏量等数值,这些故障往往和参数值有关,因此维修时若确认PMC信号或连线无误,应检查有关参数。
目录
一、FANUC-16系统参数
1、SETTING参数
2、RS232C口参数
3、I/O 通道0的参数
I/O 通道1的参数
4、进给伺服控制参数
5、坐标系参数
6、行程限位参数
7、DI/DO参数
8、显示和编辑
9、编程参数
10、螺距误差补偿
11、刀具补偿
12、主轴参数
13、其它
二、FANUC-0i 系统参数
1、0i系统的有关参数
三、FANUC-0系统参数
1、SETTING 参数
2、RS232C口参数
3、坐标系参数
4、伺服控制轴参数
5、行程限位
6、进给与伺服电机参数
7、DI/DO参数
8、显示和编辑
9、编程参数
10、螺距误差补偿
11、刀具补偿
12、主轴参数
13、其它
一.16系统类参数
2、RS232C口参数
I/O 通道1的参数:
4、进给伺服控制参数
5、坐标系参数
8、显示和编辑
12、主轴参数
二.FANUC -0系统参数
2.RS232C口参数
4.伺服控制轴参数
5.行程限位
6.进给与伺服电机参数
8.显示和编辑
9.编程参数
10.螺距误差补偿
11.刀具补偿
12.主轴参数
13.其它。
fanuc series 0i-mf 参数说明书
fanuc series 0i-mf 参数说明书Fanuc 0i-MF是Fanuc公司的最新一代数控系统,具有功能强大、操作简便、稳定可靠的特点。
下面将对Fanuc 0i-MF的参数进行说明。
1.硬件参数Fanuc 0i-MF采用高性能的工控机作为控制器,具有以下硬件参数:-主处理器:采用高性能多核处理器,保证了系统的高效稳定运行;-存储器:内置大容量存储器,可存储大量的加工程序和参数设置;-显示器:高分辨率彩色触摸屏显示器,操作界面友好,操作简便;- I/O接口:提供多个数字输入输出和模拟输入输出接口,可连接多种外部设备。
2.轴控制参数Fanuc 0i-MF支持多轴同时控制,具有以下参数设置:-轴数:最多可控制32个轴,可根据加工需求进行灵活配置;-运动控制方式:支持点位控制、直线插补、圆弧插补等多种运动方式;-轴速度:可根据加工需求设置轴的最大速度和加速度;-轴精度:可根据精度要求设置轴的回零精度和运动精度。
3.运动控制参数Fanuc 0i-MF具有强大的运动控制功能,可以精确控制加工过程,具有以下参数设置:-插补周期:可根据加工要求设置插补周期,确保运动平滑;-进给速度:可根据加工物料和加工工艺设置进给速度;-快速移动速度:支持设置快速移动速度,提高加工效率;-加工时间:可根据加工过程的复杂程度设置加工时间。
4.输入输出参数Fanuc 0i-MF支持多种输入输出设备和接口,可以满足不同的外部连接需求,具有以下参数设置:-数字输入输出:支持设置多个数字输入输出和开关量输入输出;-模拟输入输出:支持设置多个模拟输入输出和模拟量输入输出;-通信接口:支持以太网、RS232、USB等多种通信接口,方便与外部设备进行数据交互。
5.用户界面参数Fanuc 0i-MF操作界面简单直观,友好易用,可自定义设置,具有以下参数设置:-显示语言:支持多种语言选择,适应不同国家和地区的操作需求;-操作方式:支持手动操作和自动操作两种模式,方便操作人员操作;-图形界面:支持显示加工路径、示教示意图、参数设置等图形化界面。
FAUNC 0i 基本参数表
2011.04.28FANUC 0i 基本参数表1 NO.20 设置为4(存储卡接口生效)2 NO.138#7(MNC) 是否从存储卡进行DNC运行0:不进行1:进行3 NO.1001#0(INM) 直线轴的最小单位是0:公制单位1:英制单位4 NO.1002#0(JAX) JOG进给,手动快速移动以及返回参考的同时可控制的轴数0:1轴1:3轴5 NO.1005#1(DLZx)将无挡块参考点设定功能定位0:无效1:有效6 NO.1006#0(ROTx)设定直线轴或旋转轴NO.1006#3(DIAx)各轴的移动指令为0:半径指令1:直径指令NO.1006#5(ZMIx)手动参考点返回方向为0:正方向1:负方向7 NO.1008#0(ROAx)将旋转轴的循环功能设定为0:无效1:有效注释:ROAx仅对旋转轴(参数ROAx NO.1006#0=1)有效8 NO.1020 各轴的程序名称输入类型:参数输入数据类型:字节轴型数据范围:65~67 85~89轴名称:可以从A B C U V W X Y Z中任意(但T系列中代码体系A的情形下不可使用U V W)选择轴名称X Y Z A B C U V W设定值88 89 90 65 6 67 85 86 879 NO.1022 设定各轴为基本坐标系中的哪个轴输入类型:参数输入数据类型:字节轴型数据范围:0~7 圆弧插补刀具半径刀尖半径补偿等的平面G17:XY 平面G18:ZX 平面G19:YZ 平面设定各控制轴为基本坐标系的基本3轴X Y Z的哪个轴,或哪个所属平行轴。
基本3轴的设定,仅可针对其中的一个控制轴。
可以将2个或更多个控制轴作为相同基本轴的平行轴予以设定设定值含义0 旋转轴非基本3轴也非平行轴1 基本3轴的X轴2 基本3轴的Y轴3 基本3轴的Z轴5 X轴的平行轴6 Y轴的平行轴7 Z轴的平行轴9 NO.1023 各轴的伺服轴号输入类型:参数输入数据类型:字节轴型数据范围:0~控制轴数次参数设定各控制轴与第几号伺服轴对应。
FANUC0I常用参数
FANUC0I常用参数1)参数(P):
P00:机器型号
P01:版本号
P04:每分钟脉冲数
P05:芯片计数器
P10:主回路数
P15:轴数
P17:补正系数
P20:选择模式(G90/G91)
P21:机器坐标系统(G54~G59)
P23:轴反转启用
P24:原点模式(G53/G54)
P25:机器轴主要轴联动
P26:每轴联动方式
P30:原点偏移量
P31:原点偏移量累计量
P32:模块联动
P33:每轴振动补偿
P34:曲线补偿
P35:原点回位方式
P37:多维坐标系模式
P40:加减速模式
P41:曲线加速度
P42:曲线减速度
P43:最大进给倍率
P44:最小进给倍率
P45:进给位置循环
P46:旋转行程循环
P47:开始位置轴锁定
P48:横移位置循环
P49:横移行程循环
P50:尾部裁切量
P51:加工精度
P52:最大精度
P53:速度控制精度
P54:位置控制精度
P55:回转编码器直径补偿
P56:刀具特性P57:指定轴转向P60:单位换算P61:主坐标轴P62:次坐标轴P63:辅助坐标轴P64:每轴行程P65:轴报警
P66:轴报警联动P67:小脉冲补偿P68:极限报警P69:空闲报警P70:指令编码P71:刀具偏移量P72:最小角抖动。
FANUC0I常用参数

FANUC0I常用参数
1.通用参数:
-PWE(表面粗糙度补偿):设置工具的切削半径和切削长度的自动补偿。
可以根据工件的表面要求进行调整。
-MTS(度量制/英制转换):设置数控系统的度量制或英制模式。
-PWE(手动工具切换):允许操作员手动更换工具,以便进行不同类型的加工操作。
-MP(机床保护控制):设置机床的各种保护功能,如过载保护、过温保护等。
-APS(绝对/相对坐标切换):设置坐标系的工作方式,可以选择绝对坐标或相对坐标。
2.坐标系参数:
-G54-G59(工件坐标系):设置机床中工件坐标系的位置和切换。
每个坐标系都有自己的工件原点和参考点。
-G92(坐标系偏移):允许在加工过程中对当前坐标系进行微调,以便更好地与工件的实际位置相匹配。
3.配置参数:
-G50(坐标系偏移):设置初始位置和加工范围之间的偏移量,以便更好地控制机床的加工范围。
-G10(工件坐标系设置):设置工件坐标系的位置和旋转角度,以便更好地与实际工件匹配。
-G30(第二工件原点):如果需要对工件进行多次加工,可以设置第二个工件原点,以便在不同位置进行加工。
以上仅是FANUC0i中的一些常用参数,这些参数可以根据具体的加工要求进行调整和设置。
在使用数控系统时,操作员应根据实际情况和机床要求进行正确的参数配置,以确保加工过程的顺利进行。
FANUC_0i系统参数的设定方法
(2)伺服电动机ID号(MOTOR ID NO)
(3)AMR:设定电枢倍增比 α 系列和α i系列伺服电动机设定为“00000000” 与电机内装编码器类型无关。 (4)CMR:设定伺服系统的指令倍率 设定值=(指令单位/检测单位)×2 如数控车床的X轴通常采用直径编程:为1
数控铣床和加工中心:为2
5.伺服调整画面
(五)串行主轴参数设定
1. 主轴模块标准参数的初始化 主轴模块标准参数的初始化,就是将主轴的设定参数 按FANUC标准主轴电动机型号进行重新覆盖。对于 FANUC系统,主轴模块标准参数初始化的步骤如下: (1)系统急停状态,打开电源; (2)将主轴电动机型号的代码(参见伺服电机表) 设定在系统串行主轴电动机代码参数No.4133中。 (3)将自动设定串行数字主轴标准值的参数4019#7 (LDSP)置为“1”。 (4)将电源关断,再打开,主轴标准参数被写入。
参数表
P352
通用系统参数的修改
(一)打开参数写保护开关P86 (二)根据参数号查找参数P86 (三)修改参数值P87
通用系统参数的修改
(一)打开参数写保护开关
通用系统参数的修改
(一)打开参数写保护开关
通用系统参数的修改
(二)根据参数号查找参数
通用系统参数的修改
(二)根据参数号查找参数
(一)FANUC0i系统参数的意义
数控系统的参数完成数控系统与机床结构和机 床各种功能的匹配,使数控机床的性能达到最 佳。
(二)FANUC0i系统数控系统参数的 分类
FANUC0i数控系统的参数按照数据的形式大致 可分为位型和字型
FANUC 0i常用参数及pmc诊断信号地址
1020
1022 1023 1320 1321 1401#0 1410 1420 1422
PM-O
0000#1
1
103,113
10
20 0为232口,4为存储卡
138
1可选DNC文件
1005#0
调试时为1
1006#0
旋转轴为1
1006#3
车床的X轴
1006#5 1020
0:+,1:88(X),89(Y), 90(Z),65(A),
工件号检: PN1,PN2,PN4,PN8,PN16
16/18/21/0i/PM
T
M
G4/3
G4/3
G5/6
G5/6
G6/2
G6/2
G6/4
G6/4
G7/1
/
G7/2
G7/2
G7/5
G7/5
G8/0
G8/0
G8/4
G8/4
G8/5
G8/5
G8/7
G8/7
G9/0-4 G9/0-4
进给倍率: *OV1,*OV2,*OV4,*OV8
快移时间常数 切削时间常数 分离型位置检测器 电机绝对编码器 各轴位置环增益 各轴到位宽度 各轴移动位置偏差极限 各轴停止位置偏差极限 各轴反向间隙 P-I控制方式 单脉冲消除功能 虚拟串行反馈功能
电机代码 负载惯量比 电机旋转方向 速度反馈脉冲数
1620 1622 1815#1 1815#5 1825 1826 1828 1829 1851 2003#3 2003#4 2009#0 2020 2021 2022 2023
电机最大值/减速比
使用1
CNC控制轴数
FANUC0I系统程序和参数等备份、恢复
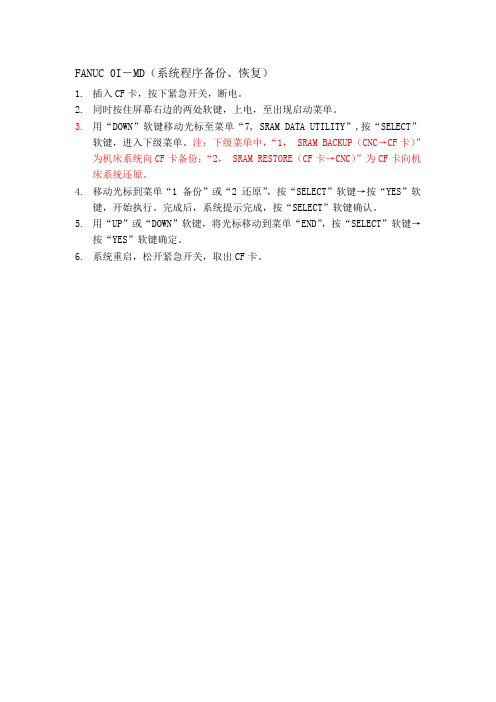
1.插入CF卡,按下紧急开关,断电。
2.同时按住屏幕右边的两处软键,上电,至出现启动菜单。
3.用“DOWN”软键移动光标至菜单“7, SRAM DATA UTILITY”,按“SELECT”软键,进入下级菜单。注:下级菜单中,“1, SRAM BACKUP(CNC→CF卡)”为机床系统向CF卡备份;“2, SRAM RESTORE(CF卡→CNC)”为CF卡向机床系统还原。
4.移动光标到菜单“1 备份”或“2 还原”,按“SELECT”软键→按“YES”软键,开始执行。完成后,系统提示完成,按“SELECT”软键确认。
5.用“UP”或“DOWN”软键,将光标移动到菜单“END”,按“SELECT”软键→按“YES”软键确定。
6.系统重启,松开紧急开关,取出CF卡。
发那科0iC数控系统参数
PRM3102#3 繁体汉语 PRM3190#6 简体中文
参数分类
• 通讯接口 • 轴控制/设定单位〔1000〕 • 坐标系〔1200〕 • 进给速度〔1400〕 • 伺服参数〔1800、2000〕 • DI/DO参数〔3000〕 • 显示及编辑〔3100〕 • 编程〔3400〕 • 螺距误差补偿〔3600〕 • 主轴控制〔3700、4000〕 • 有关加工运行〔5000、6000、7000〕 • 〔固定循环、刀具补偿、图形显示等〕 • 有关FSOI根本功能的参数〔8100〕 • 其他参数
高分辨率设定
参数号 2000#0
设定单位:1/1000mm000mm
闭环
半闭环
1
1
外装检测器
1815 00100010 00100000 00100010 00100000
速度反馈脉冲 2023
8192
8192
819
819
位置反馈脉冲 2024
NS
12500
NS/10
参数设定帮助引导方法
伺服设定〔AXIS SETTING〕 项,伺服设定有二种画面, 一般常用的如图画面所示。
在参数设定帮助画面,选 择至伺服设定菜单,按 [〔操作〕]软键,再按 [选择]软键,进入伺服 设定画面,再按软键扩展 [>]键,再按[切换]软 键,进入伺服设定画面。 根据机床要求设定伺服参 数,如下图。
轴设定〔进给速度〕
PRM1424 各轴的手动快速运行速度 标准设定:5000/10000
PRM1425 各轴回零的FL速度 标准设定:400
轴设定〔加/减速〕
FANUC0I-MD系统常用参数
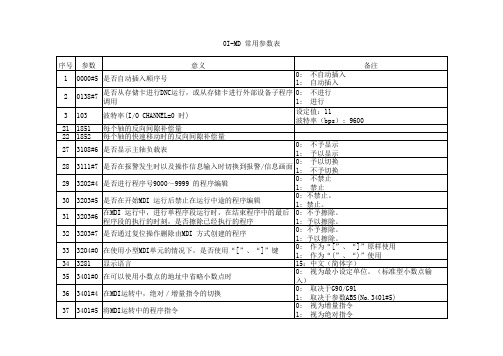
备注 0: 设定为地址D 1: 设定为地址H [数据单位] mm、inch [数据单位] mm、inch
0: 作为高速深孔攻丝循环使用 1: 作为深孔攻丝循环使用 [数据单位] mm、inch 0: 始终以绝对指令进行指定 1: 随绝对指令(G90) /增量指令(G91)而定
30 3203#5 是否在开始MDI 运行后禁止在运行中途的程序编辑
0: 不禁止。 1: 禁止。
31
3203#6
在MDI 运行中,进行单程序段运行时,在结束程序中的最后 程序段的执行的时刻,是否擦除已经执行的程序
0: 不予擦除。 1: 予以擦除。
32 3203#7 是否通过复位操作删除由MDI 方式创建的程序
22 1852 每个轴的快速移动时的反向间隙补偿量
27 3108#6 是否显示主轴负载表
0: 不予显示 1: 予以显示
28
3111#7
是否在报警发生时以及操作信息输入时切换到报警/信息画面
Hale Waihona Puke 0: 1:予以切换 不予切换
29 3202#4 是否进行程序号9000~9999 的程序编辑
0: 不禁止 1: 禁止
36 3401#4 在MDI运转中,绝对/增量指令的切换
0: 取决于G90/G91 1: 取决于参数ABS(No.3401#5)
37 3401#5 将MDI运转中的程序指令
0: 视为增量指令 1: 视为绝对指令
序号 参数
意义
39 5001#2 刀具半径补偿(G40,G41,G42)中,将指令补偿号的地址
0: 不予擦除。 1: 予以擦除。
33 3204#0 在使用小型MDI单元的情况下,是否使用“[”、“]”键
0: 作为“[”、“]”原样使用 1: 作为“(”、“)”使用
FANUC 0i 系统参数

FANUC 0i 系统参数1. 参数的显示按MDI面板上功能键→[参数]2. 参数的设定MDI方式→[SYSTEM] →PARAMETER WRITE(参数写入)=0/1(0 不许写入,1 允许写入)如从本序号开始修改数据,可在数据和数据之间用(;)分隔进行连续输入参数设定之后,将PARAMETER WRITE(参数写入)画面修改为=13. 参数说明对于位和位轴参数,每个数据号由8位组成,每一位意义不同每个数据有一定的数数据范围4. 参数界面没有记载的空白参数,是为扩展而备用,必须将其设置为05. 有关SETTING的参数N0000.#0 TVC 是否进行TV校验(0 进行,1 不进行)#1 ISO 输出时代码为(0 EIA代码,1 ISO代码)#2 INI 输入单位为(0 公制,1 英制)#5 SEQ 是否进行顺序号自动插入(0 不进行,1 进行)N0001#1 FCV 纸带格式为(0 标准格式,1 FS10/11格式)N0012#0 MIRx 各轴镜像设定(0 镜像关闭,1 镜像开通)N0020I/O 通道设定为0或1 RS-232-C串行接口1设定为2 RS-232-C串行接口1N0100#1 CTV (0 注释部分进行TV校验,1 注释部分不进行TV校验)#3 (0 ISO代码对EOB输出LF、CR,1 ISO代码对EOB仅输出LF)#5 DN3 (在DNC运行时,0 一段一段的读,1 连续读到缓冲器满为止)#6 IOP (0 NC复位能停止程序输出/输入,1 用[STOP]停止程序输出/输入) #7 ENS (读取EIA代码时发现NULL代码时,0 产生报警,1 不产生报警) N0101有关通道I/O的参数#0 SB2 停止位数(0 1位,1 2位)#3 ASI 数据输入时的代码(0 EIA或ISO自动识别,1 ASC码)#7 NFD 数据输出时,数据前后进给的孔(0 输出,1 不输出)注:使用FANUC PPR输入/输出设置时,NFD设定为1)参数号#7 #6 #5 #4 #3 #2 #1 #0N0102输入/输出没备的规格(指定值为0~6)N0103 波特率波特率设定值对应表设定值波特率设定值波特率设定值波特率1 502 1003 1104 1505 2006 3007 600 8 1200 9 240010 4800 11 9600 12 19200N0113 (I/O=1时的波特率,如上表)N0121 对应I/O CHANNEL=2的参数,与N0101相同)N0122 输入输出设备规格号CHANNEL=2时N0123 波特率CHANNEL=2时N0960 管理器参数N1001 直线轴最小移动单位#0 INM (0 公制,1 英制)注:设定此参数后,须切断一次电源N1002#0 JAX (手动同时控制轴数,0 1轴,1 3轴)#1 DLZ 无档块参考点设定功能是否有效(0 无效,1 有效)注:用参数N1005#1可设定每个轴是否有效N1008 循环功能是否有效N1022 在基本坐标系中设定各轴名称及平行轴N1023 各轴的伺服号N1220 外部工件坐标数值N1221 G54坐标数值N1222 G55坐标数值N1223 G56坐标数值N1224 G57坐标数值N1225 G58坐标数值N1226 G59坐标数值N1240 在机械坐标系上的各轴第1参考点的坐标值N1241 在机械坐标系上的各轴第2参考点的坐标值N1242 在机械坐标系上的各轴第3参考点的坐标值N1243 在机械坐标系上的各轴第4参考点的坐标值N1310 是否进行存储式行程检测2的检测#0 OT2 (0 不进行,1 进行)是否进行存储式行程检测3的检测#0 OT3 (0 不进行,1 进行)N1401#0 RPD 从接通电源后至返回参考点结束期间,手动快速运行(0 无效变为JOG进给,1 有效)#1 JZR 定位(G0)(0 各轴分别快速动动,非直线插补,1 刀具轨迹为直线)#2 JZR 用JOG进给速度手动返回参考点(0 不进行,1 进行)#4 RFO 快速进给时,切削进给倍率为0%时,进给(0 不停止,1 停止)#5 TDR G74或G84时,空运行(0 无效,1 有效)#6 RDR 对快速运行指令,空运行(0 无效,1 有效)N1402 #4 JRV JOG进给和增量进给(0 每分进给,1 每转进给)注:在N1423中设定进给速度N1403 #0 MIF 每分进给F指令最小单位N1404 #1 DLF=1时,三轴联动有效N1405 #0 F1U 指定F1位数进给的进给速度参数(N1451~N1459)的数据单位N1424 各轴手动快速运行速度注:如设为0,使用参数N1420的设定值N1425 各轴返回参考点的FL值N1426 切削进给时的外部减速速度N1427 各轴快速运行时的外部减速速度N1428 各轴返回参考点速度注:设为0时,功能无效N1430 各轴最大切削进给速度N1431 预读控制方式中的最大切削进给速度(全轴通用)N1432 预读控制方式中每个轴的最大切削进给速度N1450 F1位数进给时的手摇脉冲发生器每一格的进给速度的变化量N1451 对应F1位数指令F1的进给速度N1452 对应F1位数指令F2的进给速度N1453 对应F1位数指令F3的进给速度N1454 对应F1位数指令F4的进给速度N1455 对应F1位数指令F5的进给速度N1456 对应F1位数指令F6的进给速度N1457 对应F1位数指令F7的进给速度N1458 对应F1位数指令F8的进给速度N1459 对应F1位数指令F9的进给速度N1460 F1位数指令的进给速度的上限值(F1~F4)N1461 F1位数指令的进给速度的上限值(F5~F6)N1600 F速度上限值N1611 #2 OVB (0 切削进给时,程序段不重叠,1 切削进给时程序段重叠)注:程序段重叠,是指程序段结束时剩余脉冲,和下一段分配脉冲一起输出,这样可避免可避免程序段之间速度的变化,通常在切削方式G64中,程序段连续时重叠有效,但连续指定微小程序段时,可能不执行重叠#4 RTO 快速运行时,程序段(0 重叠,1 不重叠)#5 NCI 减速时到位检测(0 不检测,1 检测)#6 ACD 拐角时是否使用减速功能(0 不使用,1 使用)N1602 #0 FWB 切削进给插补前的直线加减速的形式(0 A型,1 B型)A型:改变进给速度指令时,在执行到改变进给速度段之后,开始加减速B型:减速在本程序段之前,加速在本程序段之后#2 COV 是否使用拐角(外圆弧)自动倍率(0 使用,1 不使用)#4 CSD 自动拐角减速功能(0 按角度,1 按速度差)#6 LS2 预读方式中切削进给的插补后加减速(0 指数函数型,1 直线型)N1603 预读控制中的加减速N1610 加减速类型N1620 设各轴快速进给加减速时间常数T1(范围0~400)N1620 设各轴快速进给加减速时间常数T2(范围0~512)N1630 设各轴切削进给加减速时间常数N1623 各轴切削进给的指数函数加减速度的FL速度必须设为0,如设定为其它的值,将不能得到正确的直线或圆弧形状N1624 各轴JOG进给的加减速时间常数N1625 各轴JOG进给指数函数加减速时间FL速度N1626 各种螺纹切削循环时的指数函数型加减速时间常数N1627 各种螺纹切削循环时的指数函数型加减速的FL速度N1710 自动拐角倍率内圆弧切削速度最小减速比(内圆弧自减速)N1711 内侧拐角倍率的内侧判断角度N1712 内侧拐角倍率的倍率量N1713 内侧拐角倍率的开始距离N1714 内侧拐角倍率的终点距离N1722 快速进给程序段之间重叠时的快速进给减速比N1730 圆弧半径R的进给速度上限值N1731 对应进给速度上限值的圆弧半径N1732 基于圆弧半径的进给速度嵌的下限值N1740 自动拐角减速的2个程序段间的临界夹角N1741 自动拐角减速时的减速结束的进给速度(用于插补后减速)N1762 预读控制方式中的切削进给的指数函数加减速度时间常数N1763 预读控制方式中的切削进给的指数函数加减速的下限速度N1764 预读控制方式中切削进给的直线加减速的时间常数N1770 设定插补前直线加减速的加速度参数1N1771 设定插补前直线加减速的加速度参数2N1777 自动拐角减速功能的下限速度N1779 自动拐角减速的2个程序段间的临界夹角N1780 根据速度差进行自动拐角减速功能的允许速度差(插补前加速时)N1781 根据速度差进行自动拐角减速功能的允许速度差(插补后加速时)N1783 根据速度差进行自动拐角减速的各轴允许速度差(插补前减速时)N1784 在轴差补前进行加减速期间发生超程报警时的速度N1785 用加速度确定进给速度时,决定允许加速度的参数N1820 各轴指令倍乖比N1821 各轴的参考计数器容量N1825 各轴的伺服环增益N1826 各轴的到位宽度N1827 设定各轴切削进给的到位宽度N1830 各轴伺服关断时的位置偏差量的极限值N1836 可进行参考点返回的伺服误差量N1850 各轴的栅格偏移量N1852 各轴快速进给时的反向间隙补偿量N1874 感应同步器转换系数的分子N1875 感应同步器转换系数的分母N1876 感应同步器的一个切距N1877 感应同步器的移动量N1880 异常负载检测报警时间N1881 检测到异常负载时的组号N1885 转距控制期间总行程的最大允许值N1886 取消转距控制时的位置偏差量N1895 用于铣刀的伺服电机的轴号N1896 伺服电机轴侧的齿轮齿数N3002 #4 IOV 倍率信号和快速运行信号(0 使用负逻辑,1 使用正逻辑)N3004 #1 BCY (0 只检测程序中第一个循环,1 每个循环都检测)注:N3004#1=0时有效#5 OTH 超程限位信号(0 检测,1 不检测)N3011 M、S、T、B功能的完成信号(FIN)的可接收宽度N3017 复位信号的输出时间N3030 M代码允许的位数N3031 S代码允许的位数N3032 T代码允许的位数N3033 B代码允许的位数N3100 设定显示器#6 COR 设定显示器(0 黑白,1 彩色)注:使用8.4寸LCD时,设为1N3104 #0 MCN 机械位置显示(0 不按照输入单位显示,1 按输入单位显示)#3 PPD 坐标系设定时相对位置显示(0 不预置,1 预置)#4 DRL 相对位置显示(0 含刀具长度补偿,1 不含刀具长度补偿)#6 DAL 绝对位置显示(0 含刀具长度补偿,1 不含刀具长度补偿)#7 DAC 绝对位置显示(0 含刀具半径补偿,1 不含刀具半径补偿)N3105 #0 DPF 显示画面是否显示实际速度(0 不显示,1 显示)#1 PCF 在实际显示设定上是否加上PMC控制轴的移动(0 加,1 不加)#2 DPS (0 不显示实际主轴转速T代码,1 显示实际主轴转速T代码)N3106 #4 OHD (0 不显示操作履历表,1 显示操作履历表)#5 SOV 是否显示主轴倍率值(0 不显示,1 显示)N3107 #0 NAM (0 显示程序一览表时只显示程序号,1 显示程序一览表时显示程序号和程序名称)MDL (0 显示画面不显示模态,1 显示画面显示模态)N3108 #4 WCI 在工件坐标系画面,设定计数器输入是否有效(0 无效,1 有效)#6 SLM 是否显示主轴负载表(0 不显示,1 显示)N3112 #0 SGD(0 显示伺服波形,1 不显示伺服波形)#2 OMH 是否显示外部操作信息履历画面(0 不显示,1 显示)N3113 #0 MCH 是否禁止删除外部操作信息的履历内容(0 禁止,1 不禁止)N3114 #0~#5 各显示画面是否切换(0 切换,1 不切换)N3115 #0 NDP 各轴是否进行位置显示(0 进行,1 不进行)#1 NDA 是否显示绝对坐标和相对坐标的位置(0 显示,1 不显示)#6 D10 现在位置及原点偏置的显示(0 通常显示,1 10倍后再显示)N3116 #2 PWR 可写入参数报警方式报警解作除(0 用[CAN]+[RESET]键清除,1 用[RESET]清除)N3132 现在位置显示的轴名称(绝对坐标)N3133 现在位置显示的轴名称(相对坐标)N3134 工件坐标系画面和工件偏移画面的各轴数据的显示数据N3151 显示伺服电机第1号负载的轴号N3152 显示伺服电机第2号负载的轴号N3153 显示伺服电机第3号负载的轴号N3154 显示伺服电机第4号负载的轴号N3201 #0 RDL 用IO外部控制登录时(0 在已登录程序后登录,1 将已登录程序全清除后再登录,但禁止编辑的程序不清除)#1 RAL 当用读带机、穿孔机接口登录程序时(0 登录全部程序,1 只登录一个程序)#2 REP 当登录的程序与已登录的程序序号相同时(0 报警,1 将已登录程序删除后再登录,但对于禁止编辑程序不作删除)#3 PUO 当用ISO代码输出程序号的地址0时(0 输出.:”,1 输出0)#5 N99 #6为0时(0视为登录结束,1 不视为结束)#6 NPE 程序登录时,对M02、M30、M99的程序段(0 视为登录结束,1 不视为登录结束)N3202 #0 NE8 J是否禁止程序号8000~8999号子程序编辑的设定(0 不禁止,1 禁止)#4 NE8 J是否禁止程序号9000~9999号子程序编辑的设定(0 不禁止,1 禁止)#5 CPD 删除NC程序时,确认注释和确认软键(0 不输出,1 输出)N3203 #6 MER MDI中对于已执行程序(0 不删除,1 删除)注:程序中只要有结束代码%,程序一定被删除#7 MCL 用复位是否可以删除MDI程序(0 不删除,1 删除)N3204 #2 DXK 在EDIT中不显示软键[C-EXT]注:使用[C-EXT]可以得到.(、@、).三个字符#6 MKP 在MDI方式中,自动清除已运行程序N3210 口令(保护9000以后程序)注:可删除固化程序,与N3211同用,NE9中密码通常是隐藏属性M3211 关键字(与口令同用)N3290 #0 WOF 是否禁止通过MDI输入刀具偏置(0 不禁止,1 禁止)#1 GOF 是否禁止通过MDI输入刀具几何形状偏置(0 不禁止,1 禁止)#2 MCV 是否禁止通过MDI输入宏程序变量(0 不禁止,1 禁止)#3 WZO 是否禁止通过MDI输入工件原点偏置(0 不禁止,1 禁止)#6 MCM 通过MDI输入变量时(0 输入,1 只在MDI才可以输入)N3294 禁止由MDI输入刀具偏置量的开头号N3295 禁止由MDI输入刀具偏置量的个数N3401 #4 MAB 在MDI中,如何切换绝对和相对指令(0 用G90、G91,1按参数N3401ABS设定#5 ABS 对于MDI运行方式的程序指令(0 视为相对指令,1 视为绝对指令)注:MAB为1时才有效N3402 #0 G01 接通电源及清除状态时(0 G0,1 G01)#1~#2 G!8/G19 全设为0时,通电后默认为G17平面注:00 G17,01 G18,10 G19#3 G91 接通电源时及清除状态(0 G90,1 G91)#7 G23 接通电源时(0 G22方式,存储行程检测开,1 G23方式,存储行程检测关)N3403 #5 C1R 在圆弧插补指令中,未指令起始点到中心距离I、J、K也没指令圆弧半径时(0 直线插补到终点,1 报警P/S 022)N3404 #4 M30 (0 程序结束返程序头,1 程序结束不返程序头)#5 M02 (0 程序结束返程序头,1 程序结束不返程序头)#7 M3B 一个程序段中,可以出现的M代码的个数(0 1个,1 最多3个)N3405 #0 AVX 最小单位设定(0 0.001,1 按输入单位)#1 DWL (0 G04中暂停为每秒,1 G04中暂停为每转)#4 CCR (0 使用C、R、A要带逗号,1 使用C、R、A不带逗号,此时A、C不能作为轴名称使用N2410 半径误差注:超出数据后,报警号为N020N3411 不缓冲的M代码1N3412 不缓冲的M代码2N3413 不缓冲的M代码3N3420 不缓冲的M代码10N3421 不缓冲的M代码的最小值1N3422 不缓冲的M代码的最大值1N3423 不缓冲的M代码的最小值2N3424 不缓冲的M代码的最大值2N3425 不缓冲的M代码的最小值3N3426 不缓冲的M代码的最大值3N3427 不缓冲的M代码的最小值4N3428 不缓冲的M代码的最大值4N34291 不缓冲的M代码的最小值5N3430 不缓冲的M代码的最大值5N3431 不缓冲的M代码的最小值6N3432 不缓冲的M代码的最大值6M3460 设置第二轴地址A B C U V W65 66 67 85 86 87N3620 各轴参考点的螺距误差补偿点号码N3621 各轴负方向最远一端螺距误差补偿点的号码N3621 各轴正方向最远一端螺距误差补偿点的号码N3623 各轴螺距误差补偿倍率N3624 补偿点间隔N3771 恒表面速度控制方向时(G96)主轴最低转速N3772 主轴上限转速N3802 第2主轴上限转速N5001 #0 TLC 选择长度补偿类型(0 A型或B型,1 C型)#1 TLB (0 长度补偿通常为Z轴,是A型,与平面无关,长度补偿与指定平面G17/G18/G19垂直,B型)#2 OFH (0 长度用H,半径用C或D,1 长度半径都用H)注:长度决定于参数#5的设定注:使用半径补偿B时,一定要设为1#3 FCL 长度补偿C中,(0 进行2轴以上补偿报警,1 进行2轴以上补偿时不报警)#4 EVR 刀具补偿C方式中,变更刀具偏置时(0 在下一个D代码或H代码被指令的程序段有效,1从下个缓冲程序段有效)#5 TPH 使用G45~G48的偏置号的地址(0 用D代码指令,1 用H代码指令)注:#2=0时,本设置有效#6 EVO 长度补偿A或B中,更改补偿时(0 下一个G43/G44或H代码程序段开始有效,1 从下一个缓冲程序开始有效)N5002 #0 LDI 刀具偏置号(0 用T代码后两位决定,1 用T代码后1位决定)N5003 #0 SUP 刀具半径补偿C中,起刀和取消的形式(0 A型,1 B型)#6 LVC 刀具偏置补偿,利用复位(0 不取消,1 取消)#6 LVK 刀具长度补偿,利用复位(0 取消,1 不取消)#7 TGC 利用复位,取消刀具几何补偿(0 不取消,1 取消,#6=1时有效)N5004 #1 ORC 刀具偏置补偿(0 在直径中指定,1 在半径中指定)#2 ODI 刀具半径补偿(0 半径设定,1 直径设定)N5008 #0 CNI 是否进行补偿干涉检查(0 进行,1 不进行)#1 CNC编程方向与偏置方向相差90~270度时(0 报警,1 不报警)#2 G39 刀具补偿C方式中的拐角圆弧功能G39是否有效(0 无效,1 有效)N5010 刀尖R补偿中,沿拐角外侧移动时忽视失量的极限值N5013 刀具磨损补偿量的最大值N5014 刀具磨损补偿量增量输入的最大值N5015 至X轴+接触面的距离XPN5016 至X轴-接触面的距离XMN5017 至X轴+接触面的距离ZPN5018 至X轴-接触面的距离ZMN5101 #0 FXV 使用钻削固定循环钻孔的轴(0 Z轴,1 程序选择的轴)#3 ILV 在钻孔循环中,利用复位对初始点设定(0 不更新,1 更新)#4~#5 固定循环中退刀轴及方向RD2 RD1 G17 G18 G190 0 +X +Z +Y0 1 -X -Z -Y1 0 +Y +X +Z1 1 -Y -X -Z#7 M5B 在固定循环中,主轴定向之前(0 输出M05,1 不输出M05)N5112 钻孔循环中,主轴正转的M代码N5113 钻孔循环中,主轴反转的M代码N5114 G83中的退刀量N5115 G83中的留空量N5166 钻孔循环速度N5200 攻丝回退参数#7 SCR 缩放倍率的单位(0 0.00001,1 0.001)N5401 各轴缩放是否有效(0 无效,1 有效)N5410 坐标系旋转中未指定旋转角度时使用的旋转角度N5411 无缩放倍率时使用的倍率N5450 #1 ACF 极坐标中,是否自动倍率(0 不进行,1 进行)N5460 极坐标中直线轴的指定N5451 极坐标中回转轴的指定N5462 极坐标中最大切削进给速度N5463 极坐标中自动倍率容许率N5512 分度工作台分度的最小角度N6001 #5 TCS 是否用T代码调用宏程序(子程序)(0 不调用,1 调用)#6 CCV 宏变量#100~#199复位后(0 清空,1 不清空)#7 CLV 宏变量#1~#33复位后(0 清空,1 不清空)N6500 #3 DPA (0 显示带刀补的的位置,1 显示编程位置)#5 ZNM 画面中心和倍率方式的画面是否进行放大(0 不放大,1 放大)N6501 #5 CSR 画面放大时图形光标的形状(0 正方形,1 X形)N6700 禁止计数N6710 零件计数的M代码N6711 加工零件数注:N6700#0=时,不能用M02、M30计数N6713 需要的零件数N6750 通电时间累计N6751 运行时间累计N6752 运行时间累计N6753 切削时间累计N6754 切削时间累计N6757 一次运行时间累计N6757 一次运行时间累计N7200 #0 OP1 是否用软操作面板进行方式选择(0 不使用,1 使用)#1 OP2 是否用软操作面板进行JOG进给轴的选择及快速进给按钮操作(0 不使用,1 使用)#2 OP3 是否用软操作面板进行手摇脉冲发生器的轴选择及倍率开关操作(0 不使用,1 使用)#3 OP4 是否用软操作面板进行JOG进给速度倍率及快速进给倍率开关的操作(0 不使用,1 使用)#4 OP5 是否用操作面板进行程序段跳过、单段执行、机床锁定、空运行开关操作(0 不使用,1使用)#5 OP6 是否用软操作面板作保护键(0 不使用,1 使用)#5 OP6 是否用软操作面板进行进给暂停操作(0 不使用,1 使用)N7210 软操作面板的JOG进给移动轴和方向↑(Z+)N7210=5N7211 软操作面板的JOG进给移动轴和方向↓(Z-)N7211=6N7212 软操作面板的JOG进给移动轴和方向→(X+)N7212=1N7213 软操作面板的JOG进给移动轴和方向←(X-)N7213=2N7214 软操作面板的JOG进给移动轴和方向↙(Y+)N7214=3N7215 软操作面板的JOG进给移动轴和方向↗(Y-)N7215=4N7216 软操作面板的JOG进给移动轴和方向N7216=0N7217 软操作面板的JOG进给移动轴和方向N7217=0N8130 CNC总控制轴数。
FANUC-0i 系统参数

课题六 FANUC 数控系统参数
三.上电全清以后的参数设置 3.参数设置过程注意点
xx FANUC数控系统应用中心
①实际参数的设定应依据设备实际情况,且以上介绍 的参数仅为调试数控系统能基本工作而进行设置。
②参数设置过程中,出现的报警可以不用处理,等所有 参数均设置完毕,需关闭设备总电源,然后再开启。
3401#0 置1
课题六 FANUC 数控系统参数
三.上电全清以后的参数设置 2.参数设置过程(供参考)
xx FANUC数控系统应用中心
3708#0 置1
课题六 FANUC 数控系统参数
三.上电全清以后的参数设置 2.参数设置过程(供参考)
xx FANUC数控系统应用中心
3736 4095 铣床有效
课题六 FANUC 数控系统参数
四.参数设置练习
xx FANUC数控系统应用中心
1.熟悉参数设置的步骤 2.系统上电清空,进行参数设置 3.查阅参数说明书,熟悉基本参数的含义 4.查阅维修说明书,查找上电清空后报警号的内容
课题六 FANUC 数控系统参数
xx FANUC数控系统应用中心
小结:
今天我们学习了数控系统参数的设置,参数的设 置是一项看似简单,但需要相当技巧的技能。需要同 学们熟悉基本参数的含义及设置。
(1)按MDI面板上的功能键 选择参数页面
几次或一次后,再按软键[参数],
(2)从键盘输入想显示的参数号,然后按软键[搜索]。可以显示 指定的参数所在页面。光标在指定的参数位置上。
课题六 FANUC 数控系统参数
二、设置FANUC数控系统参数
1、系统参数的显示方法
xx FANUC数控系统应用中心
键盘输入想显 示的参数号
Fanuc 0i 系统数控机床参数设置小经验三则
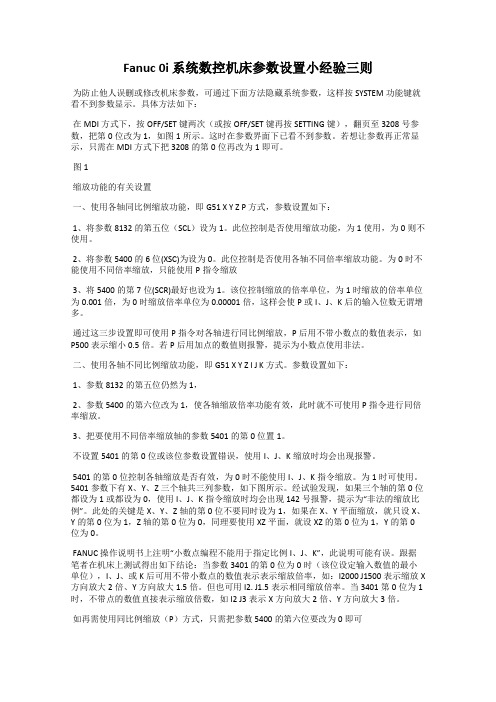
Fanuc 0i 系统数控机床参数设置小经验三则为防止他人误删或修改机床参数,可通过下面方法隐藏系统参数,这样按SYSTEM功能键就看不到参数显示。
具体方法如下:在MDI方式下,按OFF/SET键两次(或按OFF/SET键再按SETTING键),翻页至3208号参数,把第0位改为1,如图1所示。
这时在参数界面下已看不到参数。
若想让参数再正常显示,只需在MDI方式下把3208的第0位再改为1即可。
图1缩放功能的有关设置一、使用各轴同比例缩放功能,即G51 X Y Z P 方式,参数设置如下:1、将参数8132的第五位(SCL)设为1。
此位控制是否使用缩放功能,为1使用,为0则不使用。
2、将参数5400的6位(XSC)为设为0。
此位控制是否使用各轴不同倍率缩放功能。
为0时不能使用不同倍率缩放,只能使用P指令缩放3、将5400的第7位(SCR)最好也设为1。
该位控制缩放的倍率单位,为1时缩放的倍率单位为0.001倍,为0时缩放倍率单位为0.00001倍,这样会使P或I、J、K后的输入位数无谓增多。
通过这三步设置即可使用P指令对各轴进行同比例缩放,P后用不带小数点的数值表示,如P500表示缩小0.5倍。
若P后用加点的数值则报警,提示为小数点使用非法。
二、使用各轴不同比例缩放功能,即G51 X Y Z I J K 方式。
参数设置如下:1、参数8132的第五位仍然为1,2、参数5400的第六位改为1,使各轴缩放倍率功能有效,此时就不可使用P指令进行同倍率缩放。
3、把要使用不同倍率缩放轴的参数5401的第0位置1。
不设置5401的第0位或该位参数设置错误,使用I、J、K缩放时均会出现报警。
5401的第0位控制各轴缩放是否有效,为0时不能使用I、J、K指令缩放。
为1时可使用。
5401参数下有X、Y、Z三个轴共三列参数,如下图所示。
经试验发现,如果三个轴的第0位都设为1或都设为0,使用I、J、K指令缩放时均会出现142号报警,提示为“非法的缩放比例”。
FANUC_0i系统参数的设定方法

FANUC_0i系统参数的设定方法FANUC_0i系统参数是机床控制系统中的一种重要参数,它们决定了机床的运行模式、功能和性能。
正确设置FANUC_0i系统参数对于机床的正常运行和高效生产非常重要。
下面将介绍FANUC_0i系统参数的设定方法。
其次,设定FANUC_0i系统参数需要进入系统参数设定模式。
可以通过以下步骤进入系统参数设定模式:1.打开机床电源,进入FANUC_0i系统界面。
2.在FANUC_0i系统界面上按下“SYSTEM”按钮,进入系统菜单。
3.在系统菜单中选择“PARAMETER”选项,进入参数菜单。
4.在参数菜单中选择“SYSTEM”选项,进入系统参数菜单。
5.在系统参数菜单中选择“EDIT”选项,进入系统参数设定模式。
进入系统参数设定模式后,可以根据实际需要对FANUC_0i系统参数进行设定。
下面是一些常见的FANUC_0i系统参数的设定方法:1.机床坐标系参数:机床坐标系参数用于定义机床的坐标系原点和坐标轴方向。
可以根据实际情况设定机床坐标系参数,通常需要根据机床的结构和操作习惯进行调整。
2.运动参数运动参数:运动参数用于定义机床的运动速度和加减速度。
可以根据加工工件的要求和机床的性能设定运动参数,以确保机床的运动平稳和加工质量。
3.工具补偿参数:工具补偿参数用于定义刀具的几何和补偿信息。
可以根据使用的刀具和加工工件的要求设定工具补偿参数,以确保刀具的补偿精度和加工质量。
4.编程参数:编程参数用于定义机床的编程方式和规范。
可以根据编程人员的习惯和加工工件的要求设定编程参数,以确保编程的准确性和可读性。
在设定FANUC_0i系统参数时,需要注意以下几点:1.确保设定参数的合理性,避免设定错误导致机床故障或加工质量下降。
2.保存设定参数的备份,以备后续需要恢复时使用。
3.定期检查和更新设定参数,以适应机床的运行状态和加工工艺的变化。
总之,正确设定FANUC_0i系统参数对于机床的正常运行和高效生产至关重要。
FANUC0I常用参数

FANUC0I常用参数
1.系统参数:
-系统时钟:设置系统时钟的时间和日期。
-系统尺度:用于定义坐标系的尺度因子。
-系统测量单位:定义系统中的尺度单位,如毫米、英寸等。
-系统报警:设置报警的声音和灯光等参数。
-系统语言:设置显示屏的语言。
-系统保护:设置系统的保护参数,如密码等。
2.通信参数:
-通信速率:设置与外部设备通信的速率。
- 通信协议:设置与外部设备通信时使用的协议,如Modbus、Ethernet等。
-通信地址:设置与外部设备通信时使用的地址。
3.插补参数:
-加速度/减速度:设置加速度和减速度的数值。
-插补速度:设置插补运动的最大速度。
-插补精度:设置插补运动的精度,影响运动的平滑程度。
-脉冲当量:设置脉冲当量的数值,用于转换坐标系。
4.自动化参数:
-工具半径补偿:设置工具半径补偿的数值。
-刀具长度补偿:设置刀具长度补偿的数值。
-自动化程序:设置自动化程序的相关参数,如循环次数、跳转地址等。
以上仅列举了部分常用参数,实际使用中还需要根据具体的机床和加工要求进行设置。
在操作FANUC0I系统时,了解和熟悉这些参数对于正确操作和编程非常重要。
FANUC0IMC参数及诊断
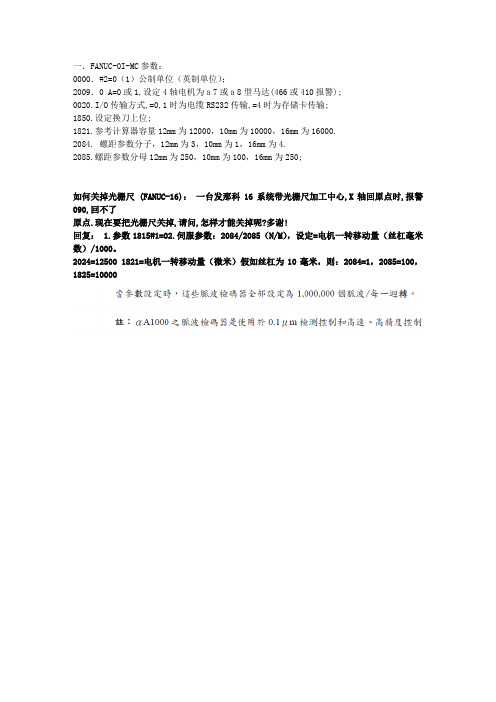
一.FANUC-0I-MC参数:
0000.#2=0(1)公制单位(英制单位);
2009.0 A=0或1,设定4轴电机为a7或a8型马达(466或410报警);
0020.I/O传输方式,=0,1时为电缆RS232传输,=4时为存储卡传输;
1850.设定换刀上位;
1821.参考计算器容量12mm为12000,10mm为10000,16mm为16000.
2084. 螺距参数分子,12mm为3,10mm为1,16mm为4.
2085.螺距参数分母12mm为250,10mm为100,16mm为250;
如何关掉光栅尺 (FANUC-16):一台发那科16系统带光栅尺加工中心,X轴回原点时,报警090,回不了
原点.现在要把光栅尺关掉,请问,怎样才能关掉呢?多谢!
回复: 1.参数1815#1=02.伺服参数:2084/2085(N/M),设定=电机一转移动量(丝杠毫米数)/1000。
2024=12500 1821=电机一转移动量(微米)假如丝杠为10毫米,则:2084=1,2085=100,1825=10000
7110.内置手摇脉冲发生器的使用台数(1--3);
3001.#7(MH1)=0为普通接口,=1为高速接口;
1421.各轴快速进给倍率的F0挡的速度;
1422.各轴最大切削进给速度;
5500.#1、#2相对(绝对)分度盘是否在360度内回转;
100.#5=0程式分段传入机床,=1程式一直传到内存满为止!。
FANUC0I常用参数

FANUC0I常用参数
1.参数5020(铣床程序显示页数):设置铣床程序显示的页数。
2.参数5041(宏变量定义):用于定义宏变量,可以在程序中使用。
3.参数5050(显示设置):设置控制面板的显示方式,例如颜色、
背光等。
4.参数5060(系统消息):控制系统消息的显示方式。
5.参数5102(刀具长度偏移值):设置刀具长度偏移的初始值。
6.参数5200(加工数据记忆区):设置加工数据的存储区域。
7.参数5300(坐标轴速度和进给率单位):设置坐标轴速度和进给
率的单位。
8.参数5400(轴名称显示):设置轴名称的显示方式。
9.参数5900(通用加工参数):设置通用的加工参数,例如进给速度、加工时间等。
10.参数6000(自动工具变更功能):设置自动工具变更的功能。
11.参数6400(切换时间设定):设置工具切换的时间。
这些参数可以通过FANUC0I控制系统的参数编程界面进行设置和修改。
在使用FANUC0I控制系统进行加工时,根据具体的加工需求和机床类型,
对这些参数进行适当的设置和调整可以提高加工的效率和质量。
参数的具
体设置方法可以参考FANUC0I控制系统的用户手册和相关文档。
需要注意的是,FANUC0I控制系统有很多其他的参数可供设置,上述
只是一部分常用的参数。
在实际使用中,还要根据具体的机床和加工需求,灵活调整其他参数以实现更好的加工效果。
FANUC常用参数
表3 α/β伺服电机代码表(OLD)电机型号 β1/3000 β2/3000 β3/3000 β6/2000 αc3/2000 αc6/2000电机代码 35 36 33 34 7 8电机型号 αc12/2000 αc22/1500 α3/3000 α6/2000 α6/3000 α12/2000电机型号 α12/3000 α22/1500 α22/2000 α22/3000 α30/1200 α30/2000表4 α主轴电机代码表(OLD)表5i 系列伺服电机代码表表6i 系列主轴电机代码表电机代码 312 314 316 318 320 322电机型号 α40/6000i α50/4500i α1.5/15000i α2/15000i α3/12000i α6/12000i 电机代码 323 324 305 307 309 401电机代码 332 333 334 335 246电机型号 ac1/6000i ac2/6000i ac3/6000i ac6/6000i ac8/6000i ac12/6000i 电机代码 240 241 242 243 244 245电机型号 α0.5/10000i α1/10000i α1.5/10000i α2/10000i α3/10000i α6/10000i 电机代码 301 302 304 306 308 310电机型号 α8/8000i α12/7000i α15/7000i α18/7000i α22/7000i α30/6000i 电机代码 173(273) 177(277) 193(293) 197(297) 203(303)电机型号 α40/3000i α4/5000is α8/4000is α12/4000is α22/4000is 电机代码 207(307) 165(265) 185(285) 188(288) 215(315)电机型号 α30/4000is α40/4000is α50/3000is α50/3000is α100/2500is 电机代码 218(318) 222(322) 224(324) 225(325) 235(325)电机型号 β3/10000i β6/10000i β8/8000i β12/7000i ac15/6000i 电机代码 112 113 114 115 116 117电机型号 β4/4000is β8/3000is β12/3000is β22/2000is αc4/3000i 电机代码 156(256) 158(258) 174(274) 176(276) 171(271)电机型号 αc8/2000i αc12/2000i αc22/2000i αc30/1500i α2/5000i 电机代码 176(276) 191(291) 196(296) 201(301) 155(255)电机型号 α4/3000i α8/3000i α12/3000i α22/3000i α30/3000i 电机代码 19 27 20 21 28 22电机型号 α30/3000 α40/FAN α40/2000 α65 α100/2000 α150电机代码 23 29 30 39 40 41电机型号 α3/8000 α6/8000 α8/6000 α12/6000 α15/6000 α18/6000电机代码 105 106 107 108 109 110电机型号 αp8/6000 αp12/6000 αp15 αp18 αp22 αp30电机代码 9 10 15 16 17 18电机型号 α8/10000i α12/10000i α15/10000i α18/10000i α22/10000i电机代码 402 403 404 405 406电机型号 α12/6000ip α12/8000ip α15/6000ip α15/8000ip α18/6000ip α18/8000ip 电机代码 407 4020 (8000)4023 (94) 408 4020 (8000) 4023 (94) 408 4020 (8000) 4023 (94) 4023 (94) 409 4020 (8000)4023 (94)电机型号 α22/6000ip α22/8000ip α30/6000ip α40/6000ip α50/6000ip α60/4500ip 电机代码 410 4020 (8000)4023 (94) 411 412 413 414。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
伺服参数:
1020:轴号(88 89 90 )1013#1=0,IS-B设定
1022 1023:轴名(1 2 3)1006#0#1=0,直线轴
2020:电机号(代码)1815#1=1:使用分离脉冲编码器2021:负载惯量比3002#4=0,倍率相关的信号逻辑不变2165:放大器最大电流值1815#4=0的原因显示诊断310 311中2022:电机旋转方向(111 -111)20=4,138=7:存储卡加工有效2023: 速度脉冲数(8192)=快移速度/(60X增益)
2024: 位置脉冲数(12500 半闭环)
全闭环:丝杠螺距/光栅尺分辨率
2185:位置脉冲数转换系数(位置脉冲数>32767时)
2084:柔性进给齿轮比(分子)
2085:柔性进给齿轮比(分母
柔性齿轮比=电机旋转一周所需的位置脉冲/100万
1010:CNC控制轴数
8130:总控制轴数
1820:指令倍乘比=(指令到位/检测单位)X2
1821:参考计数器容量
1825:各轴伺服环增益
1826:各轴到位宽度
1827:各轴到位宽度(切削进给)
1801#4:CCI切削进给时的到位宽度0:使用1826 1:专用1827
1828:移动中最大偏差
1829:停止时最大偏差
1850:栅格偏移量或参考点偏移量
2000#0=1,使参数(2023 2024)的值增大10倍
#1=0,进行数字伺服参数的初始设定
1803#1,是否在到位极限中进行停止/移动中误差过大的检查0:进行1:不进行
1804#4:在VRDY OFF忽略信号处于1的状态执行紧急停止时0:为0之前不会解除紧急停止1:解除
#5=0:在检测异常负载情况下使所有轴停止并报警
#6:当VRDY OFF报警忽略为1或各轴VRDY OFF为1时(0:伺服准备就绪信号SA为0 1:SA=1)
1311#0=1:刚通电后的存储行程限位检测有效
1300#6=0:进行手动回零前存储行程检测(1311#0=1时)
1301#6=0:超程信号不向PMC输入
#7:是否进行移动前行程检测0:不进行1:进行
3111#0=1:显示伺服设定画面
3111#5=1:予以进行操作监视显示
#6=1:操作监视画面的速度表上是主轴速度0:主轴电机速度
3160:MDI单元类别设定
3202#0 NE8=1,禁止8000-8999程序编辑#4=1 NE9 禁止9000-9999程序编辑#6使受到保护的程序的号检索0:无效1:有效
3290#7:存储器保护信号0:使用KEY1、2、3、4信号(G46.3-G46.6)
1:仅使用KEY1信号(G46.3)
3008#2:分配给X地址的信号0:属于固定地址1:可变换为任意的X地址(3013、3014、3012、3019)
12#7=1:各轴的控制轴拆除的设定有效(G124.0-G124.2为1表示对应轴拆除)
1005#7=1:将各轴的控制轴拆除信号和设定输入RMV(NO.12#7)设定为有效的
139#0:输入输出设备存储卡数据的输入输出0:通过ASCII代码进行1:通过ISO代码进行有关通道1(I/O CHANNEL=0)的参数:101、102、103
981:属于各轴的绝对路径号1
982:属于各主轴的绝对路径号1
983:各路径的路径控制类型M系列(加工中心系统):1 T系列(车床系统):0
画面显示:
3208#0=1:sys功能键无用
3114=0:按各功能键可以切换画面
3115#0=1:不显示X、Y、Z画面及坐标
3116#2=0(8900#0)发生SW100报警可通过CAN+RST消除
3135:实际显示进给速度小数点以下位数(0-3)
8134#6=0:使用后台编辑#7=0:显示工作时间和零件数
8136#0=0:使用工件坐标系
3195#2=0:显示参数辅助设定界面
3105#0#2=1:显示实际速度/实际主轴速度、T代码
3106#5=1:显示主轴倍率
3108#6=1:显示主轴负载表(3105#2=1时有效,串行)
3131:轴名称的下标
进给参数:
1402#1=0:JOG倍率有效
#4(0:每分进给1:每转进给)
1006#3=0:各轴移动指令(半径)
1001#0=0:最小移动单位(公制)
3401#0=1:视为mm,inch,sec单位
1410:空运行速度1423:JOG速度
1411:切削进给速度1424:手动快移速度
1420:各轴快移速度1425:FL速度
1421:F0速度1428:参考点返回速度
1430:最大切削速度1434:每轴手动手轮最大进给
1624:JOG加减常数1625:JOG加减FL速度
3003#0#2#3:互锁信号各轴互锁信号各轴方向互锁信号
3003#4(3003#3=0)时,不同轴向互锁信号0:唯有在手动有效1:手动和自动都有效
主轴参数:(串行)
4133:电机代码3798#0=1:所有的主轴报警被忽略
4019#7=1:主轴初始化3799#0=1:不显示主轴放大器一侧的报警(3798#0=0)时有效3701#1#4=0:主轴数为1 3715#0=1:不进行主轴速度到达检测
3716#0=1:使用串行主轴3708#0=0:不检查速度到达信号
3717=1:各主轴的主轴放大器号3799#1=1:不进行模拟主轴编码器断线检查(3799#0=0)3718:主轴下标3799#2:使用串行主轴时,主轴速度0:基于来自位置8133#5=0:使用串行主轴编码器的反馈脉冲计算1:基于速度监视器进行计算3741-3744:齿轮挡1-4最高转速
3111#1=1:显示SP设定、SP调整、SP监视
3772:主轴上限速度
4020:电机最高速度
3713#4=1:使用主轴倍率
3720:位置编码器脉冲数
主轴电动机内装传感器主轴准停参数:
4000#0=0:主轴与主轴电动机方向相同
4002#0=1:使用电机内装传感器为位置反馈
4010#0=1:电动机内装带一转信号的传感器
4015#0=1、8135#4=0:主轴定向功能有效
8133#1=1:使用主轴定位
3732:主轴定向速度
4077:定位角度
3706#5=0:主轴准停电压极性为正
3706#6#7=0:(M03 M04 为正)
3705#1=0:根据SOR信号(G29.5)进行主轴定向
手轮进给参数:
8131#0=1:使用手轮进给
7100#0=1:在手动(JOG)方式中,手轮进给有效
#1=1:使TEACH IN JOG 方式下的手轮有效
7102#0=0:各轴移动方向与手轮回转方向相同
7103#2=1:手轮进给/增量进给放大10倍
#3=1:手轮进给中断移动量增大10倍
7110:手轮脉冲使用的台数
7113:手轮进给倍率m
7114: 手轮进给倍率n
每个轴各自m、n 12350、12351
8135#1=1:使用手轮中断
回零参数:
1005#0:在通电后没有执行一次参考点返回状态下,通过自动运行指定了伴随G28以外移动指令时0:发出PS224(回零未结束)1:不发报警就执行操作
1007#1=0:自动返回参考点G28通过快移回零
1401#0=1:通电后参考点返回之前,将手动快移设为有效
#2:是否通过JOG进给速度进行手动参考点返回0:不进行1:进行1002#3:参考点未建立时G28指令0:执行与手动回零相同、借助挡块的操作
1:显示PS304
1.有挡块回零:
1002#1=0 1005#1=0
1006#5=0:手动参考点返回方向为正
1821:参考计数器容量
1850:栅格偏移量/参考点偏移量(1008#4=0)
1620:快速进给加减速时间常数
1425:FL速度
3003#5=0:减速信号有效,信号为0时减速
1420:每轴的快移进给
1424:各轴手动快移进给(为0时,用1420的值)
1404#1:参考点建立后的手动返回参考点操作0:快移1420速度1:手动快移1424速度下
2.无挡块回零:
1002#1=1 1005#1=1 1006#5=0
1815#5=1:绝对位置检测器
1815#4=0:绝对原点未建立
1008#4=1 (1850)
1012#0:无挡块设定参考点时,是否禁止再次设定参考点0:不禁止1:禁止(PS301)1002#7=1:(1)对于禁止用无挡块设定参考点轴,再次设定参考点时,会出现90报警
精选文档(2)用无挡块再次设定参考点时,先(1002#7=0)再设定。
螺距误差补偿参数:
11350#5=1:显示补偿画面轴号(3621<3620)
1800#4:是否进行切削/快速移动反向间隙补偿0:不进行1:进行
1851:每轴反向间隙补偿量(微米)
1852:快移时的反向间隙
1817#2:使用平滑反向间隙补偿0:无效1:有效
3605#0:是否使用双向螺距误差补偿0:不1:使用
8135#0=0:使用存储型螺距误差补偿
3620:每轴参考点的螺距误差补偿号
3621:每轴最靠近负侧螺补号(=参考点补偿号-负向机械行程/补偿间隔+1)
3622:每轴最靠近正侧螺补号(=参考点补偿号+正向机械行程/补偿间隔)
3623:每轴螺距误差补偿倍率
3624:补偿间隔(最小值=进给速度max/7500)。