中海达GPS参数
中海达GPS简明操作手册
中海达HD8200BGPS简明操作手册华北水利水电学院测绘工程实验室第一部分:外业仪器观测工作与注意事项1一、安置仪器1二、量测天线高2三、启动仪器4四、观测5五、撤站5六、野外观测的注意事项5七、HD8200B静态观测记录-步骤5第二部分:接收机数据传输6一、启动接收机数据传输软件6二、接收机系统参数的设置10第三部分:内业数据处理与步骤、要求10一、GPS基线解算10二、GPS基线向量网平差11附1: HDS2003数据处理软件包-各功能区界面简介121、管理区132、属性区143、计算区16中海达HD8200BGPS简明操作手册第一部分:外业仪器观测工作与注意事项一、安置仪器首先,在选好的观测站点上安放三脚架,然后,小心打开仪器箱,取出基座与对中器,将其安放在脚架上,在测点上对中、整平基座.最后,从仪器箱中取出GPS天线或内置天线的GPS 接收机,将其安放在对中器上,并将其紧固.在安置仪器时用户要注意下面的几点:①当仪器需安置在三角点觇标的基板时,应先将觇标顶部拆除,以防止对信号的干扰,这时,可将标志的中心投影在基板上,作为安置仪器的依据;②基座上的水准管必须严格居中;③如整个控制网在同步观测过程中使用同样的GPS接收天线,则应使天线朝同一个方向,如使用不同的GPS接收天线,则应使天线的极化方向指向同一方向,如指北.大部分天线用指北方向来表明天线的极化方向.这是由于天线的相位中心与几何中心不重合,两者可能有2-3毫米之差,如它们不指向同一方向,则会影响GPS测量的精度.二、量测天线高安置好仪器后,用户应在各观测时段的前后,各量测天线高一次,量至毫米.量测时,由标石〔或其它标志〕中心顶端量至天线中规定量测天线的位置〔图1〕.图1 量测天线高采用下面公式计算天线高:H h R h =-+202h :为标石或其它标志中心顶端到天线下沿所量距离;R 0:天线半径;h 0:天线相位中心至天线底部量测位置的距离.所算H 即为天线高.两次量测的结果之差不应超过3mm,并取其平均值. 其中,R 0、h 0通常由厂家提供,下表列出了一些接收机的这两个参数:表5-3 〔单位:毫米〕应当说明的是,各种天线高的量测位置不一样,其量测位置应参见其本身的说明,中海达为各种GPS 接收机配备的天线有更加简便的量测方式,在HDS2003数据处理软件中可直接设置天线的斜高,软件会自动计算,下图所示为HD8200B 天线高的量测方法,具体天线高的计算和输入可以在HDS2003数据处理软件中进行,如图3天线管理器〔点击HDS2003数据处理软件包"项目"菜单下的"原始参数"子菜单,设置原始参数〕,亦可在HDS2003数据处理软件中,在选择"文件"->"导入",导入数据后,在属性区窗口的修改标签中选择修改测量方法为天线斜高,见图4.h图2HD8200B天线高的量测方法图3 天线管理器图 4 属性窗口中的测量方法的修改天线高记录手簿型号:记录人:三、启动仪器在启动仪器时,通常应按如下步骤操作:1. 打开主机上的开关,若电源灯为红色,则表示电量不足,应更换电池.HD8200B 仪器面板灯的状态与其代表的含义:状态灯闪黄,电源灯为红色 表明正在跟踪卫星,电压足够且稳定状态灯黄色,电源灯为红色表明卫星已锁定,并记录数据 电源灯闪烁 闪烁次数表明锁定的卫星数 电源灯与状态灯同时闪烁电池欠压,必须尽快更换充足电的电池 电源灯为红色 主机向外发送数据,常发生在数据传输时数据灯、状态灯交替闪烁主机在线升级时接收固件信息2、按照相应仪器的操作规程开机观测,具体步骤请参看《产品手册》.3、保证同步观测的其它GPS 接收机也处于观测状态.静态差分测量是根据几台接收机共同时间段所接收的数据进行差分解算,所以几台接收机同时观测必须保证数据同步,并且要保证足够的数据.4、观测的时候,要保证接收机设置了合适的采样间隔和高度截止角.注:GPS 测量是通过地面接收设备接收卫星传送的信息来确定地面点的三维坐标.测量结果的误差主要来源于GPS 卫星、卫星信号的传播过程和地面接收设备.通过选择有效的卫星与其高度角NO . 点号 时段 天 线 高开机时 关机时 平均值00 01 02a、可以减少电离层和对流层折射产生的影响;b、可以消除多路径效应;c、可以有效地剔除有干扰的卫星.5、记录观测站点的点名、天线高、观测时段与相应的观测文件名.在同一天〔GPS时〕内,如测站名与时段序号一样则出现同名.用户在出测前一定要合理安排好,尽量避免出现重名的情况〔如同点名设置不同的时间段〕.四、观测按照预定的观测时间进行观测.注意:在采集时测站不可移动,采集不能中断,组成基线的两台接收机连续同步采集时间必须符合要求,否则数据可能不可靠.如出现意外情况,应与时通知其它观测站点.五、撤站结束采集之前,用户必须确认观测站的全部预定作业项目均已按规定完成.这时,退出采集过程,一定要先关闭主机电源,将接收机、基座对点器等附件妥善放回仪器箱内.六、野外观测的注意事项在野外观测时,用户必须注意:1、如果仪器从与室外温度相差较大的室内或汽车内取出,必须让其有一个预热的过程,时间大约为10分钟左右.2、仪器如长时间不使用,将可能需要较长时间搜索GPS卫星<2-3分钟>.3、注意不要在靠近接收机的地方使用对讲机、手提等无线设备.七、HD8200B静态观测记录-步骤HD8200B为一体化静态测量GPS接收机,只要打开接收机的电源开关,整个记录过程就会自动完成.1、架设GPS接收机,整平、对中后,量天线高.2、打开接收机的电源开关,等待记录灯转红后表示接收机已经开始观测〔接收卫星信号〕.3、按遥控器键ON/ESC开机,显示屏显示开机画面并进入主菜单,与打开的接收机连接.4、遥控器连接上接收机后,自动进入主界面,主菜单的右侧分别有信号指示.若连接失败,则①检查接收机主机是否打开或距离较远,按Enter键重新连接;或②按Esc键,选择"系统设置",选中"搜索机号"自动搜索接收机的机号,搜索到接收机则会显示该接收机号,按Enter键完成;或③选择"系统设置",选中"接收机机号",输入接收机号,按Enter键确认.注意删除原先机号时须连续按Esc键5次.以上方法若还不能连接到接收机,则接收机电量显示处显示"Link Fail !!!",此时可按Shift键重新连接,或关闭遥控器、关闭接收机〔按ON/ESC键2秒〕.若连接成功,进入下面内容;5、选择接收机"工作方式":选择静态,按Enter键确认;6、选择主界面的③"采集设置",可进行采集间隔、高度截止角、文件名建立、天线高设置等.注意:①采集过程中不能修改"采集间隔";②文件名须4位字母或数字,时段编号1位,删除原先文件名时须连续按Esc键,快速连续按相同键时可在数字与字母键之间切换,输入新文件名后须按新建或修改键确认,否则无效〔可通过选择主界面的记录信息查看有效的文件名,参见7〕;③小数点须配合Shift键·键〔同时按〕.7、选择主界面的②"卫星状态"可查看卫星信息、信噪比等;④选择"定位信息"查看单点定位情况E、N、H数据与卫星的分布精度;⑤选中"记录信息"可以查看接收机的内存中采集文件的相关信息和一些设置的参数,也可以查看内存的使用情况、采集的时间、有效的文件名.④⑤情况按Enter键可切换相关内容.8、在仪器观测记录本上记录下测站名、天线高、观测时段等,留待内业处理.9、测量完毕,关闭遥控器〔按ON/ESC键2秒即可〕、关闭接收机〔按ON/ESC键2秒或选择"系统设置",选中"关闭接收机"即可〕.等待电源灯熄灭后,再装箱撤站.在记录过程中切不可搬站.第二部分:接收机数据传输一、启动接收机数据传输软件将接收机主机用通讯电缆连接好电脑的串口1〔COM1〕或串口2〔COM2〕.运行主程序HDS2003数据处理软件包中的"工具"菜单下的"HitMon数据传输"或直接运行HitMon.exe文件.界面如图5:图5a接收机数据传输软件主窗口图5b接收机数据传输软件主窗口主界面分为两个主要的页面:文件和串口.文件页面主要显示接收机内存空间的文件信息与其内存的使用情况,可以进行数据传输的一些工作.点击串口,可以将显示信息切换到串口页面,该页面主要显示串口的反馈信息见〔图6〕.文件页面的各项内容分别说明如下:[文件名] 输入测站信息后,根据点名、时段号和数据观测的日期自动生成.文件名遵循以下的规律:####$$$*.ZHD,其中####代表点名,$$$代表年积日〔可查看附录年积日表〕,*代表时段号,可以是字母和数字.[开始时间] 数据开始记录的时间,为年月日时分,如:2003年6月24日10:10.开始时间是用户在数据传输时的一项重要信息,是用户识别数据的一项参考.[结束时间] 结束数据观测的时间,只有时分,如12:15.[文件大小] 该测站观测文件的大小.[测站名] 测站的点名,最多可以修改15次.[天线高] 仪器高度,一般几台仪器取同一个基准.天线高要在野外测量时手工记录.[其他] 显示其他文件信息.图6 串口反馈窗口1.通讯设置,运行在"连接"下选择"通讯设置",选择"通讯串口"为计算机上连接使用的串口,选择响应的波特率〔HD8200的波特率为57600,HD8200B,HD8900,HD9900等波特率应为115200,某些仪器必须设为静态工作模式才能进行连接〕,见图7串口设置.图7串口设置2.接收机主机开机后,选择"连接"-"连接",或点击快捷键和按钮,等待一段时间,即可以显示接收机内存中的所有文件信息和内存使用信息.如下图8所示:图8文件信息该接收机中已存在三个时段的观测数据,其中一个文件已经下载,另外两个时段只输入测站信息还没有下载.3.设置下载文件的存储目录在下载文件以前,首先应该设置数据的下载路径.点击文件下的"设置下载文件的存储目录"或点击工具条的按钮,弹出图9对话框,设置数据存储目录.图9 设置下载路径4.输入测站信息选择需要输入观测信息的文件.对于没有输入测站信息的数据不可以下载.输入测站信息时,根据观测数据的时间段确定观测数据的对应关系.如图10所示,在要下载数据上单击右键,选择"输入测站信息".图10 输入测站信息测站信息包括以下几个方面:测站名、时段、天线高,用以记录该测站的相关信息,测站信息最多可以修改15次.图11 测站信息5.文件下载选择需要下载的观测文件,点鼠标右键,选择下载〔如图12〕,数据即可保存到设置的下载路径."其他"栏中显示文件下载的进度.图12 文件下载菜单二、接收机系统参数的设置利用接收机做静态观测以前,一般要设置下面两个参数:采样间隔和卫星的高度截止角.为了保证数据的同步,同时观测的几台仪器必须保证相同的采集参数.选择菜单"工具"-"采样间隔、高度截止角设置",如下图13所示.图13 高度截止角和采样间隔设置第三部分:内业数据处理与步骤、要求一、GPS 基线解算GPS 基线解算的过程1. 原始观测数据的读入.在进行基线解算时,首先需要读取〔导入〕原始的GPS 观测值数据.一般说来,各接收机厂商随接收机一起提供的数据处理软件都可以直接处理从接收机中传输出来的GPS 原始观测值数据,而由第三方所开发的数据处理软件则不一定能对各接收机的原始观测数据进行处理,要处理这些数据,首先需要进行格式转换.目前,最常用的格式是RINEX 格式,对于按此种格式存储的数据,大部分的数据处理软件都能直接处理.具体内容见第二部分接收机数据传输.2. 设定基线解算的控制参数.基线解算的控制参数用以确定数据处理软件采用何种处理方法来进行基线解算,设定基线解算的控制参数是基线解算时的一个非常重要的环节,通过控制参数的设定,可以实现基线的精化处理.控制参数在"静态基线"→"静态处理设置"中进行设置,主要包括"数据采样间隔"、"截止角"、"参考卫星"与其电离层和解算模型的设置等.3. 外业输入数据的检查与修改.在读入〔导入〕了GPS 观测值数据后,就需要对观测数据进行必要的检查,检查的项目包括:测站名、点号、测站坐标、天线高等.对这些项目进行检查的目的,是为了避免外业操作时的误操作.4. 基线解算的过程一般是自动进行的,无需过多的人工干预.只是对于观测质量比较差的数据,用户须根据各种基线处理的输出信息,进行人工干预,使基线的处理结果符合工程的要求.5. 基线质量的检验:基线解算完毕后,基线结果并不能马上用于后续的处理,还必须对基线的质量进行检验,只有质量合格的基线才能用于后续的处理,如果不合格,则需要对基线进行重新解算或重新测量.基线的质量检验需要通过RATIO、RDOP、RMS、数据删除率、同步环闭和差、异步环闭和差和重复基线较差来进行.6. 结束二、GPS 基线向量网平差GPS 基线解算就是利用GPS 观测值,通过数据处理,得到测站的坐标或测站间的基线向量值.我们在采用GPS 观测完整个GPS 网后,经过基线解算可以获得具有同步观测数据的测站间的基线向量,为了确定GPS 网中各个点在某一坐标系统下的绝对坐标,需要提供位置基准、方位基准和尺度基准,而GPS 基线向量只含有在WGS-84 下的方位基准和尺度基准,而我们布设GPS 网的主要目的是确定网中各个点在某一特定局部坐标系下的坐标,这就需要通过在平差时引入该坐标系下的起算数据来实现.当然,GPS 基线向量网的平差,还可以消除GPS 基线向量观测值和地面观测中由于各种类型的误差而引起的矛盾.根据平差所进行的坐标空间,可将GPS 网平差分为三维平差和二维平差,根据平差时所采用的观测值和起算数据的数量和类型,可将平差分为无约束平差、约束平差和联合平差等.在使用数据处理软件进行GPS 网平差时,需要按以下几个步骤来进行:在进行网平差设置之前,应检查坐标系的设置是否正确.通常情况下,国内用户选择的坐标系椭球为54,用户需要专门设置中央子午线、x和y方向和加常数等.坐标系的设置可在项目菜单下的项目属性中进行.如下图14所示:图14 坐标系管理在网平差结束后,应对网平差结果进行检验,网平差的检验主要通过改正数、中误差以与相应的数理统计检验结果等项来评价.附1: HDS2003数据处理软件包-各功能区界面简介工作区:工作区分为管理区,属性区和计算区,如图15a、15b.可以通过"查看"菜单选择打开或者关闭哪种工作区,对任何一栏的工具条,用户也可以拉动、拖放和自定义.图15a 查看菜单图15b 三区视图1、管理区打开一个项目后,管理区会分类型显示项目中的内容,其分为文件、基线和站点,可以通过标签进行却换,都是树形视图.在主项上有文件数显示,如图16图16管理区2、属性区打开一个项目,选择一个文件、基线、站点可以查看到当前对象的属性,属性区标题显示了当前的对象,一般分为"一般"、"修改"和"##图",他们之间可以通过点击相应的标签进行却换,如图17.一般.文件、基线和站点都有一般标签,主要显示一些固定的信息.图17 一般文件、基线和站点都有修改标签,这里面的信息是可以修改的,图18 修改文件、基线都有观测数据图.如图19图19 观测数据图解算后得基线有基线残差图.如图20图20 基线残差图文件有卫星跟踪图.如图21图21 卫星跟踪图3、计算区计算区分为解算、信息、旧解算和旧信息,可以通过标签却换. 解算区会显示当前解算的状况.图22基线解算信息区会显示当前解算后的一些信息.图23 基线处理详解旧解算会显示以前解算的状况.图24 旧解算旧信息会显示以前解算后的信息.图25旧信息。
中海达GPS说明书

一.开关GPS主机二. GPS工作模式的设置三.电台频道设置四. GPS主机面版灯含义五. Dolphin手簿操作说明六.架设基准站七.手簿与GPS主机的连接(蓝牙无线连接)八.手簿程序的操作流程(转换参数配合高程拟合法)1.新建项目2.设置基准站3.断开手簿与基准站GPS主机4.添加控制点5.连接手簿与移动站GPS主机6.移动站设置7.采集碎部点坐标8.求解转换参数和高程拟合参数9.点放样10.测量成果的导出九.附录1.卫星检验2.接收机复位3.设置高程拟合模式说明4.连接程序的安装5.手簿常用快捷键功能一览表6.求解七参数的操作7.计算两点间距离8.计算校正参数9.直线放样10.HD-POWER操作程序的升级一、开关GPS主机1、按电源键1秒,开机2、按电源键3秒,关机二、控制面板按键图解主机控制面板有按键两个:F键(功能键)和电源键,指示灯3个,分别为电源、卫星、状态。
按键和指示灯的功能和含义分别是:V8 CORS RTK 系统面板控制和指示说明图2 主机控制面板按键图工作方式: ●亮○灭方式卫星灯(单绿灯)信号灯(双灯之绿灯)基准站● ○移动站○ ●数据链:类型卫星灯(单绿灯)信号灯(双灯之绿灯)内置UHF ● ○内置GSM ○ ●外挂● ●电台频道:频道电源灯(单红灯) 卫星灯(单绿灯)信号灯(双灯之绿灯)数据灯(双灯之红灯)0 ○ ○ ○ ○1 ● ○ ○ ○2 ○ ● ○ ○3 ● ● ○ ○4 ○ ○ ● ○5 ● ○ ● ○6 ○ ● ● ○7 ● ● ● ○8 ○ ○ ○ ●9 ● ○ ○ ●A ○ ● ○ ●B ● ● ○ ●C ○ ○ ● ●D ● ○ ● ●E ○ ● ● ●F ● ● ● ●控制面板操作说明:一、功能键操作说明:1、双击 F (间隔>0.2S,小于1S),进入“工作方式”设置,有“基站”、“移动站”、“静态”三种工作模式选择。
2、长按F大于3秒进入“数据链设置”,有“UHF”、“GSM”、“外挂”三种数据链模式选择。
中海达操作使用指南
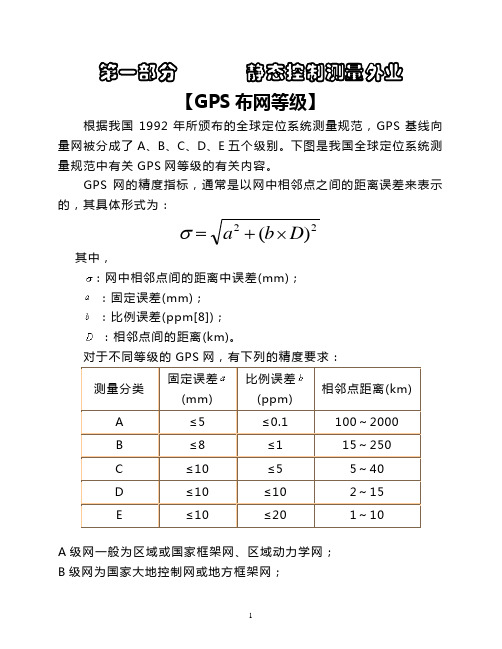
第一部分静态控制测量外业【GPS布网等级】根据我国1992年所颁布的全球定位系统测量规范,GPS基线向量网被分成了A、B、C、D、E五个级别。
下图是我国全球定位系统测量规范中有关GPS网等级的有关内容。
GPS网的精度指标,通常是以网中相邻点之间的距离误差来表示的,其具体形式为:2)2σ=+a⨯b(D其中,:网中相邻点间的距离中误差(mm);:固定误差(mm);:比例误差(ppm[8]);:相邻点间的距离(km)。
A级网一般为区域或国家框架网、区域动力学网;B级网为国家大地控制网或地方框架网;C级网为地方控制网和工程控制网;D级网为工程控制网;E级网为测图网。
大地网分C、D、E,城市网分二、三、四等、一级、二级等。
【GPS布网形式】1、点连式特点:点连式观测作业方式的优点是作业效率高,图形扩展迅速;它的缺点是图形强度低,如果连接点发生问题,将影响到后面的同步图形。
2、边连式特点:边连式观测作业方式具有较好的图形强度和较高的作业效率。
3、星形式【选点原则】1、测站点开阔(15度以上)2、无电磁波干扰(离无线电发射台距离大于200米,离高压线距离大于50米)。
3、减弱多路径效应的影响(观测站附近不应有大面积的幕墙或对电磁波反映或吸收强烈的物体)。
4、观测站应选在交通方便的地方。
5、测点易保存。
【静态野外观测】1、对中整平GPS。
2、测量仪高(三个方面取平均值)。
3、开机观测。
4、做好观测记录。
(1)点名(不大于4位数,只能是数字或字母,中间三位是年积日,最后一位是时段。
)。
(2)时段(同一点、同一天『北京时间第一天的8:00~第二天的8:00』开机一次形成一个文件。
观测N次就为N。
时段的作用是区别文件名)。
(3)仪器高度(4)开机记录时间(在状态灯闪时开始记录)。
(5)关机记录时间(6)仪器号5、同步观测一段时间后关机搬站(注:是以晚开机时间为准,距离不能超过50公里)观测注意事项:●设置GPS采样间隔和高度截止角(同步的几台GPS要设置相同)。
中海达测绘仪器有限公司产品手册说明书

本公司已竭尽全力来确保手册内载信息的准确性和完善性。
若您发现任何错误或遗漏,请与我们联系,对此,我们深表感谢。
广州市中海达测绘仪器有限公司保留随时更改手册内产品信息的权利,而无需事先通知。
广州市中海达测绘仪器有限公司服务获取资讯查阅 技术参数星站差分● 支持Hi-RTP星基增强服务(支持L-Band)GNSS配置● 通道数:400+● BDS:B1I,B2I,B3I,B1c,B2a ● GPS:L1,L2,L5● GLONASS:L1,L2● GALILIEO:E1,E5a,E5b ● SBAS:支持● QZSS:支持● 输出格式ASCII:NMEA-0183,二进制码● 定位输出频率:1Hz~20Hz● 静态数据格式:GNS,Rinex双格式静态数据● 差分格式:CMR,RTCM2.X,RTCM3.0,RTCM3.2● 网络模式:VRS,FKP,MAC;支持NTRIP协议物理特性● 主机电池:内置高容量锂电池6800mAh/7.4V,网络移动站工作时间10小时[2]● 支持快充:支持USB PD3.0超级快充,充电时间≤3.5小时。
支持充电宝充电● 外接电源:6~28V宽压直流设计,5芯接口● 尺寸:Φ156mmx77mm ● 重量:≤1.2kg(含电池)● 功耗:4.2W● 材料:外壳采用镁合金材料环境特性● 防尘防水:IP68● 防摔:抗2米高测杆自然跌落● 相对湿度:100%不冷凝● 工作温度: -30℃~+70℃● 存储温度: -40℃~+80℃系统配置● 操作系统:Linux操作系统● 启动时间:3秒● 数据存储:内置8GB ROM,支持静态数据自动循环存储用户界面● 按键:两个按键● 显示屏:0.94英寸240*120高分辨率OLED高清彩色显示屏● LED提示灯:卫星灯,信号灯传感器● 电子气泡:实现智能对中● 倾斜测量:内置高精度惯导,自动姿态补偿,无需校正,抗磁干扰, 到点即测,精度3厘米注:[1]测量精度、准确性、可靠性和初始化时间取决于各种因素,包括卫星数量、几何分布、观测时间、大气 状况及多路径效验等,该数据在正常条件下得出。
测量仪器参数

测量仪器参数一、GNSS:1、天宝:静态和快速静态GPS测量水平±5 mm + 0 5 ppm RMS垂直±5 mm + 1 ppm RMS动态测量水平±10 mm + 1 ppm RMS垂直±20 mm + 1 ppm RMS初始化时间一般少于10秒初始化可靠性>99 9%发送功率0 5 W发送距离:一般3-5公里,最佳可达10公里2、中海达:静态精度:平面:±(2.5mm+1×10-6D)高程:±(5mm+1×10-6D)快速静态精度:平面:±(5mm+1×10-6D)高程:±(10mm+1×10-6D)RTK定位精度:平面:±(10mm+1×10-6D) 高程:±(20mm+1×10-6D)3、华测静态和快速静态水平精度±(5 + 1×10-6×D) mm垂直精度±(10 + 2×10-6×D) mm作用距离(VHF)0-20km二、全站仪:1、莱卡TS09:有棱镜模式测距精度±1mm无棱镜模式测程>1000米测程3500mm标准:1mm + 1.5×10-6D / 2.4s ,快速:3mm + 2×10-6D / 0.8s,跟踪:3mm + 2×10-6D / <0.15s2、中海达GTS-102N测角精度:±2”/5”,绝对法测角,无需过零检验测距精度:±(2mm+2ppm*D)测程:2km/单棱镜高速测距:精测1.2秒,粗测0.7秒,跟踪0.4秒三、测深仪国产品牌测深范围:高频(0.3m~600m),低频(1m~3000m)测深精度:±2cm+0.1%分辨率:1cm吃水调整范围:0.0m~9.0m声速调整范围:1300~1700m/s四、水准仪1、型号:ZH7854每公里往返测量标准偏差:± 2.5mm放大倍率:24×最短视距:0.7m补偿工作范围:± 14′补偿安平精度:±0.5″2、型号DSZ2+FS1每公里往返测量标准偏差:± 1.5mm(普通标尺)放大倍率:32×最短视距:1.6m补偿工作范围:± 14′补偿安平精度:≤±0.3″。
中海达gps测量操作方法

中海达gps测量操作方法
中海达GPS测量操作步骤如下:
1.打开中海达GPS测量软件,进入主界面。
2.连接GPS设备,确保设备已经打开并能够收到卫星信号。
3.对测量区域进行准备,如清除障碍物、设定基准点等。
4.选择合适的测量模式,如点测量、面积测量、路线测量等。
5.设置测量参数,如测量精度、间隔时间等。
6.开始进行GPS测量,根据设定的测量模式和参数进行测量操作。
7.将测量结果保存到计算机或移动设备中,并可进行相应的数据处理和分析。
8.处理数据后,可输出报告或图形展示测量结果。
需要注意的是,中海达GPS测量操作前需要对GPS设备和软件进行充分的了解和熟悉,确保测量的准确性和可靠性。
同时,还需要遵守测量过程中的相关规定
和标准,以确保测量结果符合实际需要。
中海达GPS参数
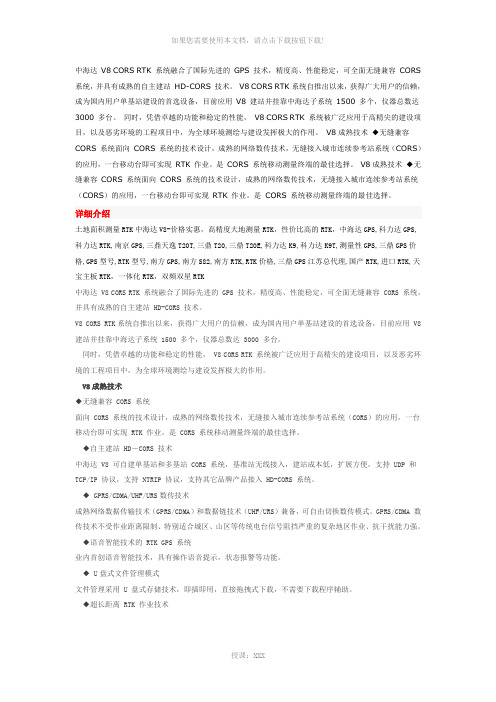
中海达V8 CORS RTK 系统融合了国际先进的GPS 技术,精度高、性能稳定,可全面无缝兼容CORS 系统,并具有成熟的自主建站HD-CORS 技术。
V8 CORS RTK系统自推出以来,获得广大用户的信赖,成为国内用户单基站建设的首选设备,目前应用V8 建站并挂靠中海达子系统1500 多个,仪器总数达3000 多台。
同时,凭借卓越的功能和稳定的性能,V8 CORS RTK 系统被广泛应用于高精尖的建设项目,以及恶劣环境的工程项目中,为全球环境测绘与建设发挥极大的作用。
V8成熟技术◆无缝兼容CORS 系统面向CORS 系统的技术设计,成熟的网络数传技术,无缝接入城市连续参考站系统(CORS)的应用,一台移动台即可实现RTK 作业。
是CORS 系统移动测量终端的最佳选择。
V8成熟技术◆无缝兼容CORS 系统面向CORS 系统的技术设计,成熟的网络数传技术,无缝接入城市连续参考站系统(CORS)的应用,一台移动台即可实现RTK 作业。
是CORS 系统移动测量终端的最佳选择。
详细介绍土地面积测量RTK中海达V8-价格实惠,高精度大地测量RTK,性价比高的RTK,中海达GPS,科力达GPS,科力达RTK,南京GPS,三鼎天逸T20T,三鼎T20,三鼎T20E,科力达K9,科力达K9T,测量性GPS,三鼎GPS价格,GPS型号,RTK型号,南方GPS,南方S82,南方RTK,RTK价格,三鼎GPS江苏总代理,国产RTK,进口RTK,天宝主板RTK,一体化RTK,双频双星RTK中海达 V8 CORS RTK 系统融合了国际先进的 GPS 技术,精度高、性能稳定,可全面无缝兼容 CORS 系统,并具有成熟的自主建站 HD-CORS 技术。
V8 CORS RTK系统自推出以来,获得广大用户的信赖,成为国内用户单基站建设的首选设备,目前应用 V8 建站并挂靠中海达子系统 1500 多个,仪器总数达 3000 多台。
中海达GPS接收机管理软件使用说明书

中海达GPS接收机管理软件使用说明书广州市中海达测绘仪器有限公司HI-TARGET SURVING INSTRUMENT CO.,LTDI手册修订情况 修订日期修订次数 说明 2012年08月 1 中海达GPS 接收机管理软件使用说明书1.0版本II 前言说明书用途欢迎使用中海达GPS接收机管理软件使用说明书,本说明书介绍了如何使用中海达GPS接收机管理软件。
说明书简介本说明书是以中海达GPS接收机管理软件V1.3.7版本软件为例,指导您如何使用中海达GPS接收机管理软件。
本说明书主要由两部分组成,第一部分为简要介绍,第二部分为软件功能的详细介绍。
经验要求为了您能更好的使用中海达GPS接收机管理软件V1.3.7,中海达建议您具备一定的测量知识,并仔细阅读本说明书。
如果您有任何疑问,请查阅中海达官方网站:。
责任免除使用本产品之前,请您务必仔细阅读使用说明书,这会有助于您更好地使用本产品。
中海达不对您未按照使用说明书的要求而操作本产品,或未能正确理解使用说明书的要求而误操作本产品所造成的损失承担责任。
中海达致力于不断改进产品功能和性能、提高服务质量,并保留对使用说明书的内容进行更改而不预先另行通知的权利。
我们已对印刷品中所述内容与硬件和软件的一致性作过检查,然而不排除存在偏差的可能性,使用说明书中的图片仅供参考,若有与产品实物不符之处,请以产品实物为准。
III安全技术提示注意 :注意提示的内容一般是操作特殊的地方,需要引起您的特殊注意,请认真阅读。
警告 :警告提示的内容一般为非常重要的提示,如果没有按照警告内容操作,将会造成仪器的损害,数据的丢失,以及系统的崩溃,甚至会危及到人身安全。
技术与服务如果您有任何技术问题,可以电话联系各分支机构技术中心、总部技术部,我们会及时的解答您的问题。
相关信息您可以通过以下途径找到该说明书:1、购买中海达RTK 系列产品后会附带一个光盘,打开光盘可以在说明书文件夹里找到此说明书;2、登陆中海达官方网站,在“下载中心”→“产品说明书”→“测绘产品”里即可找到。
中海达GPS设置步骤

中海达GPS设置步骤1.架设基站,量出仪器高度。
需注意的事项:架设完基站与电瓶连接的时候要注意红接“+”,黑接“—”,先接黑线后接红线(即先黑后红)切勿接错。
2.打开手薄,选择Hi-RTK道路版,然后双击。
出现主菜单后,点击GPS。
点击接收机信息,连接GPS,会出现GPS连接设置页面:(手薄:Q series/GIS+ 连接:Q系列/GIS+蓝牙端口:3 波特率:19200 GPS 类型:V8)。
然后点击连接,选中接收机型号(接收机型号位于接收机下部)连接。
连接完成后,点击接收机信息,选择基准站设置。
单击打开后,输入点名,天线高(即仪器高度)。
输入完成后,点击平滑,平滑时接收机会提示卫星锁定,平滑结果的时间为10s,平滑的误差应保证≤0.03。
平滑完成后,点击数据链,数据链为外部数据链,点击运用。
然后点击其他,(差分模式:RTK 电文格式:CMR 高度截止角:5—15),最后点击确定,即基站设置完成。
设置完成后电台与接收机将正常发射信号。
3.设置完基站后,点击接收机信息,断开GPS。
然后连接移动站,连接移动站的步骤和连接基站的步骤基本上一样。
即,点击接收机信息,连接GPS,会出现GPS连接设置页面,(手薄:Q series/GIS+ 连接:Q系列/GIS+蓝牙端口:3 波特率:19200 GPS 类型:V8)。
然后点击连接,选中移动接收机型号。
连接完成后,点击测量,看手薄是否显示为固定解。
若固定,则下步为踩点。
4.踩点步骤:在Hi-RTK道路版主菜单点击测量,在碎部测量中点击Σ∕n,平滑出控制点的坐标,然后打√,会弹出记录点信息,输入已知控制点的点名,天线高为2.071m,然后打√。
踩点的时候应注意,踩的点应≥3个以上,在架设基站位置的大里程踩两个点,小里程也同样踩两个点,点与点的间距可以适当选择,500m—1000m。
或者大里程踩两公里小里程踩两公里,适情况而定。
踩完点之后,退回到主菜单,点击参数,在坐标系统中,输入文件名,将平面转换和高程拟合调成无,点击保存。
中海达七参数坐标数据转换方法

中海达七参数坐标数据转换方法1.引言中海达七参数坐标数据转换方法是用于将一个坐标系统的坐标数据转换到另一个坐标系统的方法。
七参数包括三个平移参数、三个旋转参数和一个尺度参数。
在实际应用中,七参数转换常用于地理信息系统(GIS)、测量和导航等领域。
2.数据准备在进行坐标数据转换之前,需要准备两个坐标系的坐标数据。
每个坐标数据包括坐标点的三维坐标(x,y,z)和相应的椭球高(h)。
3.参数计算根据已知的源坐标系和目标坐标系的坐标数据,可以计算七个参数的值。
参数计算可采用多种方法,其中较常用的方法是最小二乘法。
最小二乘法的计算步骤如下:3.1.根据坐标数据,计算相应的坐标系平移中心。
平移中心的计算可以采用几何平均法、最大似然法等方法。
3.2.将源坐标系中的坐标点平移到平移中心。
3.3.计算源坐标系和目标坐标系的旋转矩阵。
旋转矩阵的计算可以采用相似性变换法、最小二乘法等方法。
3.4.计算旋转矩阵的欧拉角。
3.5.根据平移、旋转和尺度的定义,计算平移参数、旋转参数和尺度参数。
3.6.利用最小二乘法求解得到七参数的最优解。
4.坐标数据转换得到七参数的值之后,可以将源坐标系的坐标数据转换到目标坐标系。
转换步骤如下:4.1.将源坐标系的坐标点减去平移中心得到坐标差值。
4.2.根据旋转矩阵将坐标差值旋转到目标坐标系中。
4.3.根据尺度参数对坐标差值进行尺度变换。
4.4.将坐标差值加上目标坐标系的平移中心得到目标坐标系的坐标点。
5.转换精度评估完成坐标数据转换后,需要对转换结果的精度进行评估。
评估方法可以采用坐标残差法、平差误差法等方法。
通过比较转换后的坐标数据与目标坐标数据的差异,可以评估转换结果的精度和可靠性。
6.应用案例中海达七参数坐标数据转换方法已在许多应用案例中得到成功应用。
例如,在陆地测量中,可以将不同基准坐标系的测量数据转换到统一的坐标系统中,以实现数据的一致性和比较。
在导航领域,可以将GPS接收到的坐标数据转换到地理信息系统中使用的坐标系统,以实现位置的准确定位和导航。
中海达Qmini手持GPS使用简要说明
中海达Qmini手持GPS使用简要说明中海达Qmini HP手持GPS 使用简要说明河北省水利水电第二勘测设计研究院规划处2012.11目录1 主要功能简要介绍 (1)1.1 通用按钮 (1)1.2 主要功能 (1)2 工作流程 (10)2.1 设置坐标系统 (10)2.2 设置转换参数 (10)2.3 新建项目 (11)2.4 坐标采集 (11)2.5 坐标放样 (12)2.6 量算长度面积 (12)3 快速指南 (12)3.1 第一次工作 (12)3.2 快速采集 (12)4 其他 (13)4.1 文件交换 (13)4.2 文件格式 (14)4.3 其他 (14)中海达Qmini HP手持GPS使用简要说明1 主要功能简要介绍1.1 通用按钮(1)右上角按钮按钮:点击打开/隐藏键盘输入界面。
按钮:确认/保存退出按钮:取消/不保存退出(2)其他图标按钮:点击出现下拉选项1.2 主要功能规划中主要应用实时采集、坐标系统、工具、设置等功能模块(有兴趣的可自行参考《Hi-Q_v4.2版本软件说明书》,进行深入研究)。
1.2.1 坐标系统模块在主菜单中点击“坐标系统”按钮,进行坐标系统设置,输入坐标系统名称,然后设置各项参数。
软件主界面①椭球一般源椭球设置为“WGS-84”,目标椭球和已知点一致,一般设置为“北京54”(采集54坐标使用)或“国家80”(采集西安80坐标使用)。
注1:WGS-84 坐标系WGS-84 即世界大地坐标系,目前GPS 所采用的坐标系统。
全称是World Geodetic System -84。
由美国国防部制图局建立,于1987 年取代了当时GPS 所采用的坐标系统WGS-72 坐标系统。
WGS-84 坐标系的坐标原点位于地球的质心,Z 轴指向BIH 1984.0 定义的协议地球极方向,X 轴指向BIH 1984.0 的启始子午面和赤道的交点,Y 轴与X 轴和Z 轴构成右手系。
中海达GPS简易操作
中海达/海星达GPS简易操作一.打开手薄Hi-RTK道路版项目->项目信息->选新建,输入文件名->对号(提示项目打开成功OK) 坐标系统->椭球看源椭球WGS-84 目标椭球BJ-54或国家-80 已知点用的哪个坐标系统选哪个(独立或抵偿系或投影面坐标系选北京54即可)->投影看中央子午线输入当地常用->椭球转换->无;->平面转换->无;->高程拟合->无->保存※(这个位置一定要点保存)提示:OK->退出二.GPS1. (左上角下拉菜单)点天线设置->天线设置,选择对应的GPS类型->量取位置选择GPS底部->天线高处输入对中杆的实际长度即可(常用对中杆一般为2米)2.(左上角下拉菜单)点连接GPS->端口3,波特率19200,GPS类型选手头仪器型号->连接->搜索->找到目标主机后点停止->连接(主机叮咚一声后,连接成功)(左上角下拉菜单)基准站设置->位置->里输入点名,平滑后打勾->数据链->a用手机卡就设置内置网络(运营商CMNET,服务器IP:202.96.185.34,端口9000,网络ZHD分组号前4位数字是当地区号后3位是0-255之间的任意数值,小组号尽量与分组号后三位保持一致);b不用手机卡用电台发射信号的时候,选择外部数据链->其它->RTK,电文格式RTCM3.0,高度截止角5-12之间均可右下角一定要点确定,提示设置成功(正确设定一次之后就不要再进行设置了,等待出解)。
注意项:1,手簿上方会出现三角已知点。
2,用手机卡时主机会提示连上了,信号灯绿灯常量,红黄灯一秒闪烁一次(绿灯常量代表连接服务器正常,红黄灯闪烁说明仪器正在向外发射信号,设置成功)3.用外部数据链时,信号灯红灯一秒闪烁一次,同时外挂电台收发灯也会一秒闪烁一次,说明设置成功3.(左上角下拉菜单)点连接GPS->Q系列GIS+手薄,端口3,波特率19200,GPS类型选手头仪器型号->连接->搜索->找到目标主机后点停止->连接(主机叮咚一声后,连接成功)(左上角下拉菜单)移动站设置->数据链->a.手机卡模式数据链设置与基准站设置保持一致b电台模式时数据链选择内置电台,电台频道与外挂电台频道保持一致(常用且信号比较稳定的频道是 4.5.6这三个)->其他->电文格式RTCM3.0与基站一置。
中海达gpsrtkhirtk操作步骤
七、工作 (一)、测量
解状态
“ 1.0”表示差 分龄期 (最好 为 1.0 或 2.0)
当前点位置
手动
采集
碎部测量主界面
1、在解状态为 固定 时,对中整平,点
或按 F2,输入点名、天线高,点√
(2)、重复上个步骤,采集其他点 (二)、点放样 1、点放样
三、 设置移动站 四、 工作
一、打开第一次项目 二、设置基站
1、连接基站 2、基准站设置
同坐标系同测区第二次任意架站
(1)、位置 (A )、点名:输入点名 (B )、天线:输入基准站天线高 (C)、平滑,等待 GPS 自动平滑后,点√
(2)、数据链(选择数据链) 如果是使用电台,则选择外部数据链; 如果是使用手机卡,则选择内置网络;数据链、运营商、服务器
(1)、点 ,输入坐标,点√,根据状态栏提示,放样
2、重复上个步骤,放样其他点
(三)、点库放样 1、建立放样点文件(可以是任意格式,但是必须是文本格式, 2、传到手簿上 3、将点库文件调入到放样点库 (1)、进入放样点库
EXECEL 的 CSV 格式亦可)
(2)、点
,调入点库文件
(3)、选择点库文件,确定
;
如果是使用手机卡,则选择内置网络;数据链、运营商、服务器
IP、端口设置如图,分组
号( 7 位数)和小组号( 3 位树)要和基站相同
(2)、其他
(电台)
(手机卡)
(3)、确定 (4)、点╳ ,退出移动站设置界面
“ 00-00”,前端数据表示公用卫星数 (数字越大越好) ,后端数据表示收到 卫星数,“ 1.9”表示 PDOP 值,及卫 星分布几何强度因子 (数字越小越好)
中海达GPS说明书
纵断面设计与文件编辑
纵断面编辑
添加变坡点数据
如上图所示,可以在这个界面进行创建或编辑交点表文件, 并可以点击 查看图形是否正确。右下角输入里程值,点 击【检查里程】可以显示特定里程点的高程值。
纵断面数据编辑
A变坡点数据:坡比1=0,坡比1=H1/S1 B变坡点数据:坡比1=H1/S1,坡比2=H2/S2, C变坡点数据:坡比1=H2/S2,坡比3=H3/S3, D变坡点数据:坡比1=H3/S3,坡比3=0,
纵断面设计与文件编辑
• 纵断面是对道路纵向走势的一种表达形式,线路 要素可以手工,也可以从文件中导入(*.PVI), • 在一般工作过程中,点击 ,添加变坡点数据包括: 变坡点里程、变坡点高程、坡比1(前一线段坡 比)、坡比2(后一线段坡比)、半径(纵曲线半 径)、按照里程顺序依次添加完线路所有边坡点 的要素。 • 注:通常情况下,前一变坡点的坡比2等于后一变 坡点的坡比1,起点的坡比1为0,终点的坡比2为 0。
横断面设计与文件编辑
横断面数据编辑界面:
横断面编辑
添加横断面数据
如上图所示,可以在这个界面进行创建或编辑横断面文件,点击添 加/编辑可以对横断面特征点进行添加/编辑;这里提供了两种坡比 的输入方式,百分比或比例(如右上图)。
横断面设计与文件编辑
距离:离前一变坡点的水平距离。 坡比:(当前和前一变坡点的高差)和 (当前点与前一变坡点的水平距离)的比 值。 左右相同:打勾表示左右边坡一致。 在一般工作过程中,点击 ,对横断面进 行定义,选择坡比输入方式、输入坡比和 距离,完成编辑后可以点击显示查看图形 是否正确。 注: 内存中只存在一个横断面;一条道路在 不同路段有不同的横断面,可以根据需要,预 先 定义几个典型的横断面,然后在不同的路段 调入适合地形的横断面进行放样。
中海达GPS操作流程
中海达动态GPS操作流程一、架好GPS:1、连号GPS连线,将GPS接收机对中、整平。
2、打开GPS主机电源,在GPS主机上双击“F”键,将GPS主机设置成“基准站”模式,单击“F”键切换模式,再长按“F”键出现三种模式○1外挂电台○2UFH(内置电台、实际无)○3GSM(手机卡)按“F”键(单击)将主机切换成外挂电台。
(移动站设置为内置电台)。
二、手本设置GPS(在基站卫星信号锁定即中间灯常亮的情况下才能进行)1键,再按/start下的HD POWER,点击【设置】—>【连接】此时手本上会搜到GPS主机(基站)型号,选中后【连接】连接正常后将弹出“已经与接收机*******建立连接的提示,点OK即可。
2、点击【文件】——>对话框○1月日命名,然后点击OK。
○2用的坐标系统,常规的有WGS84、GJ80、WGS-72如有特定坐标系统也可以,好了点OK。
3(投影参数)对话框中填好中央子午线经度:如114:00:00:000(也可以自定义子午线)点OK.○43、点【设置】——>【基准站】(目的是取基准站当前一个WGS84单点坐标进行发射)○1GPSBLH类型按“ENT”回车键。
○2输入天线高(基站仪高)○3GPS单点定位解作为架设基准站的坐标。
等待GPS平滑采集单点定位解。
GPS平滑采集点位结束后回到设置基准站对话框下的(控制点页面)。
按“ENT○4按“ENT”后解类型出现“固定坐标”且基准电台“收/发”(状态灯每秒闪一次)。
基准站设置成功。
○5断开手薄与基准站GPS主机,点【设置】——>【断开】三、设置移动站:1、连接手本与移动站GPS主机点击【设置】——>【连接】将手本与移动站主机连接,连接正常时弹出—“已与接收机******建立连接”的提示。
2、用菜单【设置】——>【移动站】○1在【设置移动站】对话框中点【高级选项】a 差分电文填RTCAb 数据链填:内部UHF电台c GGA填13、卫星参数:a 卫星高度角:填10b 最大卫星数:填124、点击参数:在弹出的【设置移动站】对话框中△S填0.05(平面精度)△H填0.2(高程精度)设置天线高选“斜高”,天线高输入2.1m,相位中心高输入0.03m(固定)以上填完点击OK即可。
海星达irtk4参数
海星达IRTK4是一款卫星定位接收器,其参数包括:
1. 接收机型号:IRTK4
2. 接收机通道数:多通道
3. 定位精度:厘米级
4. 定位时间:数秒至数十秒
5. 接收机类型:GPS/北斗双模
6. 接收机输出格式:NMEA、RTCM等
7. 接收机灵敏度:-159dBm
8. 卫星接收频率:1575.42MHz
9. 蓝牙传输频率:4.0/4.2/5.0
10. 工作温度:-20℃至+60℃
具体使用方法如下:
1. 将接收机天线安装到无人机或其他载体上,确保天线稳定。
2. 将电源线接入接收机,并打开电源,接收机开始自检和初始化。
3. 自检完成后,通过蓝牙将接收机与移动设备连接,可以使用手机、平板电脑等设备进行操作。
4. 在移动设备上下载相关软件,按照软件提示设置好参数,即可开始接收卫星信号。
5. 接收机接收到卫星信号后,通过软件处理即可获得精准的定位信息。
6. 根据需要,可以通过蓝牙将数据传输到其他设备或移动设备中。
7. 在使用过程中,需要注意保护好接收机,避免摔碰和强烈震动,同时也要避免长时间暴露在高温环境中。
以上参数仅供参考,实际使用效果可能因环境、设备状态等因素而有所差异。
在使用过程中,建议参考海星达官方提供的操作指南和设备说明书,并结合实际情况进行调整和操作。
中海达GPS操作说明(杜星明编)
中海达GPS操作说明(杜星明编)中海达GPS操作说明一、单点定位求解七参数(一个已知点A)基准站:任意架设基准站,手薄与基准站连接后,菜单——文件——新建项目——快捷向导——输入项目名称——(弹出坐标系统对话框)选择和已知点对应的坐标系统——(弹出中央子午线经度)将114改成当地中央子午线(本地为111)——回车——(弹出设置基准站对话框)——ALT+A——输入点名——类型:选“当地XYH”——天线高处输入天线高——ALT+C——回车。
移动站:手薄断开基准站,连接移动站。
在A点,按“SP”测量——设置记录点属性——输入点名、天线高——[可以马上修改为已知坐标或者测完后到菜单——查看——坐标库——记录点坐标库——选择已知点名——按3(编辑)]——光标移动到菜单“控制点”按“SP”打勾——将光标移动到“详细”回车。
——ALT+A——输入已知点名(AGC)——类型:选“当地XYH”回车——将坐标值修改为已知坐标——一直回车。
菜单——辅助——计算——七参数——按7(文件)——按1(提取当前记录)——按2(解算)二、两点求转换参数(两个已知点A,B)基准站:任意架设基准站,手薄与基准站连接后,菜单——文件——新建项目——快捷向导——输入项目名称——(弹出坐标系统对话框)选择和已知点对应的坐标系统——(弹出中央子午线经度)将114改成当地中央子午线(本地为111)——回车——(弹出设置基准站对话框)——ALT+A——输入点名——类型:选“GPSBLH”——天线高处输入天线高——ALT+C——回车。
移动站:手薄断开基准站,连接移动站。
在A点,按“SP”测量——设置记录点属性——输入点名、天线高——[可以马上修改为已知坐标或者测完后到菜单——查看——坐标库——记录点坐标库——选择已知点名——按3(编辑)]——光标移动到菜单“控制点”按“SP”打勾——将光标移动到“详细”回车。
——ALT+A——输入已知点名(AGC)——类型:选“工程XYH”回车——将坐标值修改为已知坐标——一直回车。
中海达GPS静态(全球版)的使用

中海达GPS静态的使用HDS2003数据处理软件的解算步骤;首选运行HDS2003数据处理软件:1新建项目点【项目(F)】【新建(N)…】,弹出新建项目对话框,输入项目名确定,弹出项目属性设置对话框,在项目细节里填写好各项信息,点控制网等级——选择自己的控制网等级,改好后点击确定。
再点【项目(F)】【坐标系统(G)…】弹出坐标系统对话框,选择相应的坐标系。
2导入数据点【项目(F)】【导入(I)…】,弹出数据导入对话框,数据格式选择第一个中海达ZHD观测数据弹出翻开对话框选择需要解算的数据,点击翻开,数据载入并在窗口中自动生成数据的网图。
3基线处理点【静态基线(S)】【处理全部基线(A)】,软件开场自动处理全部基线,处理完后在计算区对话框里显示基线的精度,假设有不合的那么显示出不和基线的条数,在主界面的网图里,算合的基线显示为黑色,不合的基线显示为灰色。
点主界面下的列表,显示所有基线的观测时间、长度、精度等信息,假设有不合的基线那么在前面显示红色的叹号,Ratio值小于3,整数解误差过大——到达厘米级或更大,是基线不合的主要原因〔假设不合的基线可有可无那么可右键删除-把没用的基线删掉〕。
处理不合基线的方法:我们可以通过选择不合的基线,点击属性区的观测数据图观测数据图上面显示的是跟踪卫星的数据,下面的基线残差图,通过看基线残差图卫星的起伏周跳进展卫星的删除,然后重解基线来提高基线的精度,残差图中围绕中线起伏跳动小的卫星信号好,反之那么不好,可尝试用鼠标框选观测数据图上面的起伏跳动大的那颗星的数据既删除然后重解,再看基线的精度,起伏跳动大的星和某段时间起伏跳动大的数据可以用鼠标框选进展删除,删除的方法是单击基线残差图左上角的下一个,找到要删除的卫星编号,再在观测数据图上面的卫星数据里面框选这颗星起伏大的那段即删除,然后重新解算。
如要恢复先选中再点鼠标右键恢复就可以了。
假设还不合那么右键【选定基线处理设置(S)】,修改常用项里的数据采样间隔、截止角(采样间隔默认为60 秒、高度截止角默认为20度)[在数据量足够的情况下,采样间隔大些比拟好]点确定,再右键【处理选定基线(O)】,进展不合基线的重新处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
◎使用了统一曲线元模型,数值积分方法计算坐标,避免了传统多项式计算方法的截断误差;可任意定义横断面类型。
◎支持多个横断面变坡点设置,左右边坡可编辑成不对称类型。
GIS采集软件
Hi-Q数据采集软件
◎图形化软件界面,形象易懂,操作简单
1个
电池槽
2个
蓝牙
1个
RS-232串口
2个
直流电源接口
2个
UHF天线接口
1个
主机重量(含电池)
1.1KG
防尘 防水 防震
IP67,抗2米自然跌落
温度
工作
-40℃~75℃
存储
-50℃~85℃
内置电池
2个共2800mAh锂电池,不间断转换
连续工作时间
8~10小时
主机功耗
2W
GIS+手簿技术参数
系统
操作系统:Windows CE 5.0
◎ 一体化全内置工业级接收单元,坚固、轻巧。
◎内置成熟可靠的无线蓝牙设备,有效作业距离 15 米以上,意外断开时自动连接。
◎作业时电台接收天线朝下,不会影响 GPS 天线相位中心,不易被碰断。
内置 GPRS/CDMA 通讯模块
◎内藏式 GPRS 或 CDMA 通讯模块,可作远程数据传输。
外置通讯模块
中海达V8 CORS RTK系统融合了国际先进的GPS技术,精度高、性能稳定,可全面无缝兼容CORS系统,并具有成熟的自主建站HD-CORS技术。V8 CORS RTK系统自推出以来,获得广大用户的信赖,成为国内用户单基站建设的首选设备,目前应用V8建站并挂靠中海达子系统1500多个,仪器总数达3000多台。同时,凭借卓越的功能和稳定的性能,V8 CORS RTK系统被广泛应用于高精尖的建设项目,以及恶劣环境的工程项目中,为全球环境测绘与建设发挥极大的作用。V8成熟技术◆无缝兼容CORS系统面向CORS系统的技术设计,成熟的网络数传技术,无缝接入城市连续参考站系统(CORS)的应用,一台移动台即可实现RTK作业。是CORS系统移动测量终端的最佳选择。V8成熟技术◆无缝兼容CORS系统面向CORS系统的技术设计,成熟的网络数传技术,无缝接入城市连续参考站系统(CORS)的应用,一台移动台即可实现RTK作业。是CORS系统移动测量终端的最佳选择。
◎可选 UHF 电台或 URS 数据中转站。
◎ UHF电台具有 16 个通讯频道,高低两档可调。
◎ URS数据中转站具有 100个UHF 频道,最大传输距离可达 50KM。
GIS+新一代多功能 RTK 手簿
GIS+融合了国际领先的 GIS 技术,重新演绎了 RTK 手簿的定义。
GIS+搭载 530MHZ 高速 ARM920T 处理器,128M 大容量内存,配置专业的个性化软件,堪称业内最高性能的手簿。
应用领域
施工放样
丰富的点、线放样功能,辅以图形化的操作指导,给您的工程施工节约更多成本
电力交通
方便的电力测向、测距、角度计算功能;全面实用的公路测设、中桩、边桩测量,纵、横断面测量功能
CORS应用
面向 CORS 系统的应用,只需一台 RTK 移动台即可接收 CORS 差分信号进行数据采集、施工放样等所有的作业
同时,GIS+ 也是一台专家级 GIS 采集器,最高精度可达到 1 米,可轻松地调用大底图,通过自带的麦克风和高精度数码相机,还可方便地实现影像和语音属性信息的现场采集标注。
高端的系统配置
◆ WINCE5.0系统
◆ 530MHz高速 ARM920T 处理器
◆ 128M超大容量内存
◆ 3.5英寸专业级户外彩色触摸屏
◆ GPS坐标与影像属性信息自动匹配标注
◆内置麦克风、可实时语音属性信息标注
RTK手簿软件
Hi-RTK道路手簿软件和 Hi-RTK 电力手簿软件是中海达公司最新开发的多功能手簿软件。
软件使用直观的图形化操作和人机对话模式,所见即所得,实现了非常人性化的人机交流。
根据不同的行业特性,软件设计了具有有针对性的应用功能,配置丰富的参数和投影转换,支持多种语言,是一款极具人性化、专业化、全球化的手簿应用软件。
CORS建站
HD-CORS融合了中海达多年的成熟建站技术,具有运行稳定,传输距离长等优点,是城市连续参考站系统的首选解决方案。
控制测量
一次投资,多重功能,V8 Star 的双频静态测量精度满足任何控制测量要求,配套成熟的专业数据解算软件,可助您完成各种高精度的控制测量工作
数据采集
面向 GIS 系统设计的手簿操作软件,灵活的编码功能,满足您快速高效的野外数据采集需要
◎成熟的全球版坐标系统转换算法
Hi-Q Tools桌面处理软件
V8技术参数
通道数
72
信号
GPS
L1载波
√
L2载波
√
L5载波
√
CA码
√
L2C码
√
L1P码
√
L2P码
√
Glonass
L1载波
预留
L2载波
预留
SBAS
√
DGPS(实时、后处理)
√
定位精度
静态
平面
±(2.5mm+1×10-6D)
高程
±(5mm+1×10-6D)
◆自主建站 HD-CORS 技术
中海达 V8 可自建单基站和多基站 CORS 系统,基准站无线接入,建站成本低,扩展方便,支持 UDP 和TCP/IP 协议,支持 NTRIP 协议,支持其它品牌产品接入 HD-CORS 系统。
◆ GPRS/CDMA/UHF/URS数传技术
成熟网络数据传输技术(GPRS/CDMA)和数据链技术(UHF/URS)兼备,可自由切换数传模式。GPRS/CDMA 数传技术不受作业距离限制、特别适合城区、山区等传统电台信号阻挡严重的复杂地区作业、抗干扰能力强。
详细介绍
土地面积测量RTK中海达V8-价格实惠,高精度大地测量RTK,性价比高的RTK,中海达GPS,科力达GPS,科力达RTK,南京GPS,三鼎天逸T20T,三鼎T20,三鼎T20E,科力达K9,科力达K9T,测量性GPS,三鼎GPS价格,GPS型号,RTK型号,南方GPS,南方S82,南方RTK,RTK价格,三鼎GPS江苏总代理,国产RTK,进口RTK,天宝主板RTK,一体化RTK,双频双星RTK
快速静态
平面
±(5mm+1×10-6D)
高程
±(10mm+1×10-6D)
RTK
平面
±(10mm+1×10-6D)
高程
±(20mm+1×10-6D)
内存
64M
数据通讯
传输模式
2种
内置UHFF电台
接收
内置网络传输
GPRS或CDMA 二选一
外置URS数据中转站
选配
外置UHF电台
选配
端口
SIM卡插槽
1个
USB接口
中海达 V8 CORS RTK 系统融合了国际先进的 GPS 技术,精度高、性能稳定,可全面无缝兼容 CORS 系统,并具有成熟的自主建站 HD-CORS 技术。
V8 CORS RTK系统自推出以来,获得广大用户的信赖,成为国内用户单基站建设的首选设备,目前应用 V8 建站并挂靠中海达子系统 1500 多个,仪器总数达 3000 多台。
◆面向 GNSS 方向的升级功能
V8采用国际一流主板,预留通道可通过软件升级为多频多星 GNSS 系统。
◆一体化全内置加强型主机设计
工业级设计的一体化主机,针对野外施工环境设计的防水胶圈、防水塞,加固机身设计。真正做到三防:防水、防尘、防震的工业级要求。
工业级一体化主机
◎工业三防模具设计的防水塞、防水胶圈,具有防水、防尘、防震功能、可漂浮,抗 2 米自然跌落。
同时,凭借卓越的功能和稳定的性能, V8 CORS RTK 系统被广泛应用于高精尖的建设项目,以及恶劣环境的工程项目中,为全球环境测绘与建设发挥极大的作用。
V8成熟技术
◆无缝兼容 CORS 系统
面向 CORS 系统的技术设计,成熟的网络数传技术,无缝接入城市连续参考站系统(CORS)的应用,一台移动台即可实现 RTK 作业。是 CORS 系统移动测量终端的最佳选择。
数据存储
内置512M Flash闪存
数据通讯
内置SD卡槽,可无限扩展
蓝牙、USB、RS232串口
电源性能
内置7.6V锂电池,2000mAh
可连续工作12小时以上,支持在线充电
物理性能
大小:22×9×5cm
重量:500g
工作温度:-20℃~+60℃
存储温度:-30℃~+70℃
防水:IP67
防震:抗1.2米自由跌落
◆语音智能技术的 RTK GPS 系统
业内首创语音智能技术,具有操作语音提示,状态报警等功能。
◆ U盘式文件管理模式
文件管理采用 U 盘式存储技术,即插即用,直接拖拽式下载,不需要下载程序辅助。
◆超长距离 RTK 作业技术
运用超长距离 RTK 作业技术,突破传统RTK作业距离限制,让您的 GPS 发挥更高经济效益。
◎电力点采集完全实行有码作业,电力点的属性齐全,测量结果可直接和电力行业软件(如道亨软件)数据交换。
◎实时显示当前位置到当前参考线的各种几何关系,包括起点距,终点距,偏距,高差等信息。
◎对于无法达到的地方,提供了偏移存储和偏点计算采集的方式。
◎智能化的杆塔放样功能,可自动计算坑位坐标,任意加桩。
◎图形化操作的 Hi-Converter 数据转换软件。
◎多平台支持,软件可在 Windows mobile、Windows CE 手薄,以及 PC Windows 系统中运行