玻璃清洁机器人吸附机构设计(含全套说明书和CAD图纸).
爬壁幕墙清洗机器人设计说明书

江西省第二届大学生机械创新设计大赛暨第三届全国大学生机械创新设计大赛江西赛区选拔赛设计说明书INSTRUCTION OF DESIGN作品名称“小蜘蛛”幕墙攀爬清洗机参赛队伍陈明登谢信韦冯江涛刘连杰郭晓欢指导老师李国臣吴文通参赛单位井冈山大学2008年4月18日目录摘要 (i)小蜘蛛幕墙攀爬清洗机设计说明书............................. 错误!未定义书签。
作品内容简介 (4)1 研制背景及意义........................................... 错误!未定义书签。
2 主要功能和性能指标 (2)3 设计方案 (3)3。
1 机械机构 (3)3.2 控制机构 (3)4 理论设计计算 (4)4.1 真空吸附力计算 (4)4.2 幕墙清洗机器人附着的力学分析 (5)5机构设计与工作原理 (7)5。
1攀爬机构........................................... 错误!未定义书签。
5.2清洗机构 (8)5.3铰接连杆支撑机构.................................... 错误!未定义书签。
5。
4换气机构........................................... 错误!未定义书签。
6创新点及应用 (10)7作品实物工作图........................................... 错误!未定义书签。
8应用前景................................................. 错误!未定义书签。
参考文献................................................... 错误!未定义书签。
摘要:“小蜘蛛”幕墙攀爬清洗机是基于昆虫攀爬动作的仿生原理制作而成.在国内外现有的壁面移动机器人研究成果的基础上,结合高空作业的特点,在对幕墙清洗机器人的共性问题—附着技术、爬行技术、清洗技术进行分析的基础上。
玻璃外墙自动清洁机器人(验证机)_本科毕业设计论文

本科毕业论文(设计)题目:玻璃外墙自动清洁机器人(验证机)学院:物理与电子科学学院专业:电子信息科学与技术诚信承诺我谨在此承诺:本人所写的毕业论文《玻璃外墙自动清洁机器人(验证机)》均系本人独立完成,没有抄袭行为,凡涉及其他作者的观点和材料,均作了注释,若有不实,后果由本人承担。
承诺人(签名):2013 年 4 月20 日玻璃外墙自动清洁机器人(验证机)摘要:本文主要介绍了玻璃外墙自动清洁机器人的设计背景、设计思路、制作过程、工作原理、验证过程以及使用方向。
由于限于实验室条件以及对设计思路可行性的不确定性,所以决定先做一个验证机,即验证方案的可行性和对后期产品的设计提供方案。
玻璃外墙机器人在制造过程中主要使用了以下器件和材料,方管铝合金,自攻螺丝钉,铝板,DC5V步进电机,超大吸盘,微型抽气机,8mm丝杆,5mm空气导管,无线模块,5V直流电源模块,74HC595以及单片机。
玻璃外墙机器人主要是由铝合金搭建主框架,这样可以在不降低机器人强度的情况下减轻重量。
机器人铝合金结合部以铝片加自攻螺丝钉加固,运动部分使用8mm丝杆加齿轮以控制运动,动力则采用DC5V步进电机的转动带动机器人运转,在工作时,以微型抽气机抽出超大吸盘内的空气以使机器人吸在玻璃墙幕上,整个机器人使用51单片机来控制驱动,使用74HC595对单片机的I/O口进行扩展,机器人用220V交流电转5V直流电源模块供电,以确保步进电机能达到额定电流,提供强劲的动力,再用无线模块控制机器人的状态,使得机器人稳定有序的工作。
可以适合全玻璃结构的建筑体以及建筑中部分的玻璃墙面的清洁工作,它可以在无人干预的情况下完成指定玻璃墙面的清洁,替代传统的人工室外清理,。
使用玻璃外墙自动清洁机器人可以最大化的降低人的危险和劳动强度,提高工作效率,降低成本。
它还具有越障功能,对于有起伏有其他装饰材料的玻璃墙幕同样适合,同时它还能转弯,不光能垂直上下,还能向左向右移动真正做到清洁无死角。
毕业设计(论文)-自动清扫机的设计(含全套CAD图纸) .doc

毕业设计(论文)-自动清扫机的设计(含全套CAD图纸) .doc全日制普通本科生毕业设计自动清扫机设计THE DESIGN OF AUTOMATIC CLEANING MACHINE学生姓名:学号:年级专业及班级:2008级机械设计制造及其自动化(1)班指导老师及职称:学部:理工学部提交日期:2012 年 5 月完整版全套CAD图纸,说明书,联系153893706毕业设计诚信声明本人郑重声明:所呈交的本科毕业论文是本人在指导老师的指导下,进行研究工作所取得的成果,成果不存在知识产权争议。
除文中已经注明引用的内容外,本论文不含任何其他个人或集体已经发表或撰写过的作品成果。
对本文的研究做出重要贡献的个人和集体在文中均作了明确的说明并表示了谢意。
同时,本论文的著作权由本人与湖南农业大学东方科技学院、指导教师共同拥有。
本人完全意识到本声明的法律结果由本人承担。
毕业设计作者签名:年月日目录摘要 (1)关键词 (1)1 前言 (2)1.1 清扫机的现状和发展前景 (2)1.2 清扫设备的概述 (3)1.2.1 清扫设备的分类 (3)1.2.2 我国清扫机械的发展趋势 (4)1.2.3 发现的问题和解决途径 (5)1.3 课题需要完成的任务 (5)1.3.1 设计主要内容 (5)1.3.2 设计工作基本要求 (6)2 总体方案设计 (6)2.1 设计主要技术要求 (6)2.2 总体方案的确定 (6)3 动力装置的确定 (9)3.1 蓄电池的选择 (10)3.2 电动机的选择 (10)4清扫机的结构设计 (11)4.1 传动比的分配 (11)4.2 带轮的选择设计 (12)4.2.1 主轴带轮的设计计算 (12)4.2.2Ⅰ—Ⅱ轴带轮的设计计算 (14)4.2.3Ⅲ—Ⅳ轴的带轮设计 (18)4.3 主轴的设计计算 (19)4.3.1 主轴的结构设计 (19)4.3.2 轴的校核 (20)4.3.3 键的校核 (23)4.4 锥齿轮的计算 (23)4.4.1 锥齿轮的计算 (23)4.4.2 锥齿轮的校核计算 (27)4.5 车架的设计计算 (28)结论 (29)参考文献 (29)致谢 (30)附件1 (31)附件2 (32)自动清扫机的设计学生:指导老师:摘要:本文所设计的是用于走廊清扫的清扫机。
蜘蛛型玻璃清洗机器人的设计
蜘蛛型玻璃清洗机器人的设计作者:张裕佳伍伟来源:《软件工程》2016年第01期摘要:针对当前人工清洗玻璃时,存在危险性高、难度大、效率低等问题,设计了玻璃清洗机器人,具体阐述了各个组成部分的结构和工作原理,给出了结构框图和部分电路原理图,最后通过实验对机器人在玻璃壁面上的行走适应情况以及壁面清洗效果进行了测试,从测试情况可以看出,该机器人具有重量轻、体积小、清洗效果好、控制方便等特点,有较好的市场推广和应用价值。
关键词:清洗;机器人;蓝牙;吸附;设计中图分类号:TN710 文献标识码:A1 引言(Introduction)随着经济的不断发展,许多高楼大厦平地而起,但同时又带来了一个问题,那就是大厦玻璃的清洗,目前还主要靠人工清洗[1],可是人工清洗危险性很高、操作繁琐、难度较大、效率低[2,3],本文设计了一种玻璃清洗机器人,能代替人工进行玻璃清洗工作,经测试获得了较好的效果,有一定的实用价值。
2 整体硬件设计(Design of the overall hardware)设计的整体框图如图1所示,它主要由地面站(手机或电脑等有蓝牙模块的装置)、HC-06蓝牙模块、89C52单片机为核心的控制电路、以电磁阀和真空产生器为驱动模块和由两个双出杆双作用气缸和8个真空吸盘气缸的运动系统组成。
其中使用手机蓝牙串口客户端发出指令信息到和51单片机连接的蓝牙模块,单片机判断指令并执行相应子程序,发出相应的控制信号控制电磁阀的开关从而达到控制与之连接的气缸的伸出抽入,以达到机器人上、下、左、右运动的目的。
在这个移动过程中,由机器人身上所带有的清洗刷进行移动擦洗,安全保护系统主要是保证物品升降移动正常运行,最大限度的降低意外事故的发生几率。
图1 整体设计框图Fig.1 The overall design diagram3 控制芯片的选择(The choice of control chip)考虑STC89C51RC/RD+系列单片机具有宽工作电压3.4V—6V,超强抗干扰、高速、低功耗、无法解密、指令代码完全兼容传统8051、12时钟和6时钟模式可任意选择的特点[4,5]。
高层玻璃幕墙清扫机器人机械部分设计

高层玻璃幕墙清扫机器人机械部分设计简介本文档旨在描述高层玻璃幕墙清扫机器人的机械部分设计。
该机器人旨在提供一种自动化的清洁解决方案,用于清扫高层建筑的玻璃幕墙表面。
设计要求1. 结构稳定性:机器人的机械结构应具备足够的稳定性,以确保在高层建筑表面操作时不会发生意外。
2. 清洁效果:机器人的设计应能够有效地清洁玻璃幕墙表面,确保清洁效果达到预期。
3. 安全性:机器人设计应考虑到操作人员和周围环境的安全性,防止意外事故的发生。
4. 可靠性:机器人的机械部分应具备足够的可靠性,以确保长时间连续运行而无需频繁维修。
机械设计方案1. 结构设计- 机器人采用轮式移动结构,以确保在玻璃幕墙表面灵活移动。
- 主要结构材料选用高强度合金材料,以提供足够的结构稳定性和耐久性。
2. 清洁装置设计- 清洁装置采用可调节压力的喷水系统,以确保在不同情况下可选择适当的清洁压力。
- 清洁装置具备自动水量控制功能,避免浪费水资源。
- 配备可更换的清洁刷头,以适应不同类型的污垢和玻璃表面。
3. 安全设计- 机器人配备多重传感器系统,用于探测周围环境并避免与障碍物碰撞。
- 设计紧急停止按钮,以便在发生紧急情况时迅速停止机器人运行。
- 紧急疏散系统的设计,用于安全疏散操作人员。
4. 可靠性设计- 机器人配备电池和供电管理系统,以确保能够持续进行长时间的清洁操作。
- 机械部分采用模块化设计,方便更换和维修损坏或老化的部件。
结论高层玻璃幕墙清扫机器人的机械部分设计考虑了结构稳定性、清洁效果、安全性和可靠性等要求。
采用了轮式移动结构、可调节压力的喷水系统、多重传感器系统等设计方案,以提供一个自动化、高效、安全、可靠的清洁解决方案。
这将有助于提高高层玻璃幕墙清洁工作的效率和安全性。
多吸盘式玻璃幕墙清洗机器人本体设计
多吸盘式玻璃幕墙清洗机器人本体设计一、本文概述随着现代建筑技术的快速发展,玻璃幕墙作为一种时尚、美观的建筑外饰材料,被广泛应用于各类高楼大厦。
玻璃幕墙的清洁问题也随之凸显出来。
传统的人工清洁方式不仅效率低下,而且存在安全隐患。
开发一种高效、安全的玻璃幕墙清洗机器人成为行业迫切需求。
本文旨在设计一种多吸盘式玻璃幕墙清洗机器人本体,通过对其结构、功能和工作原理的详细阐述,为实际研发和应用提供理论支持和技术指导。
本文首先介绍了玻璃幕墙清洗机器人的研究背景和意义,阐述了现有清洗机器人的研究现状和发展趋势。
接着,详细描述了多吸盘式玻璃幕墙清洗机器人的总体设计方案,包括机械结构设计、控制系统设计和动力系统设计等方面。
在此基础上,重点分析了多吸盘吸附机构的设计与计算,以及吸附机构的力学特性。
本文还讨论了清洗机器人的运动学分析和轨迹规划,以确保机器人能够高效、准确地完成清洗任务。
本文总结了多吸盘式玻璃幕墙清洗机器人本体的设计特点和优势,并指出了后续研究的方向和重点。
通过本文的研究,旨在为玻璃幕墙清洗机器人的研发和应用提供有益的参考和借鉴,推动建筑行业清洁技术的创新与发展。
二、多吸盘式玻璃幕墙清洗机器人本体设计概述在现代城市建筑中,玻璃幕墙因其美观、节能等优点被广泛应用。
随着时间的推移,玻璃表面的污染和积尘问题逐渐凸显,这不仅影响了建筑的美观,还可能对玻璃的使用寿命造成影响。
为了解决这一问题,多吸盘式玻璃幕墙清洗机器人应运而生,旨在提供一种高效、安全、环保的清洗解决方案。
多吸盘式玻璃幕墙清洗机器人的设计理念基于其对玻璃表面的多点吸附能力,通过多个独立控制的吸盘与玻璃表面形成稳定的吸附力,确保机器人在垂直或倾斜的玻璃幕墙上稳定移动。
机器人本体设计需考虑吸盘的布局、吸附力度、移动机构的设计、控制系统的稳定性以及机器人的整体尺寸和重量等因素,以适不同规格和材质的玻璃幕墙。
在设计过程中,我们采用了先进的材料和结构设计,以减轻机器人的自重并提高其负载能力。
家用擦玻璃清洁机器人结构设计设计说明
家用擦玻璃清洁机器人结构设计设计说明河北工业大学毕业设计说明书作者:焦然学号: 111122 学院:机械工程学院系(专业):机械设计制造及其自动化题目:家用擦玻璃清洁机器人结构设计指导者:李辉讲师(姓名) (专业技术职务)评阅者:(姓名) (专业技术职务)2015 年 5 月 31 日毕业设计中文摘要毕业设计(论文)外文摘要目录第一章引言 (1)1.1 课题背景 (1)1.2 国内外擦玻璃机器人的研究概况 (1)1.3 本课题的主要工作 (3)第二章家用擦玻璃清洁机器人总体方案设计 (3)2.1 家用擦玻璃清洁机器人的设计原则 (4)2.2 家用擦玻璃清洁机器人的总体方案的确定 (4)2.2.1 家用擦玻璃清洁机器人的总体方案 (4)2.2.2 总体方案的对比与选择 (12)第三章家用擦玻璃清洁机器人详细结构设计 (14)3.1 关键部件的选型 (14)3.1.1 电机的选型 (14)3.1.2 微动开关的选型 (15)3.1.3 电池的选择 (15)3.1.4 磁铁的选择 (16)3.2 微动开关缓冲机构的设计 (16)3.3 磁铁升降机构的设计 (17)3.3.1 磁铁升降机构的ANSYS分析 (18)第四章家用擦玻璃清洁机器人控制系统设计 (21)4.1 单片机控制系统电路的设计 (21)4.1.1 单片机系统元器件的选型 (21)4.1.2 单片机系统的硬件电路及I/O口分配 (25)4.2 单片机系统编程框图 (25)第五章家用擦玻璃清洁机器人样机研制与调试 (27)5.1控制电路板的设计与调试 (27)5.1.1 PCB设计 (27)5.1.2 电路板的调试 (28)5.2 家用擦玻璃清洁机器人样机的制作 (31)5.3 家用擦玻璃清洁机器人样机的测试 (31)第六章总结与展望 (33)参考文献 (34)致谢 (35)附录 (37)1 引言1.1 课题背景智能家居近两年发展火热,作为其重要组成部分的智能服务机器人也不甘示弱,伴随着计算机和自动化技术的迅速发展,人们对机器人的智能性的要求也越来越高,同时智能服务机器人产业近年来也陆续被写入国家发展战略。
玻璃清洁机器人的研发-吸附机构设计(机械工程)

玻璃清洁机器人的研发-吸附机构设计摘要本课题设计任务是设计玻璃清洁机器人的吸附机构和移动机构。
通过对市面上各种吸附机构和移动机构对比和分析。
本课题提出采用单吸盘负压吸附吸附机构和安全保护系统机构的方案。
对玻璃清洁机器人进行受力分析,分析吸盘的吸附能力和密封装置,选取单吸盘作为吸附装置,并确定叶轮驱动电机型号。
设计安全保护系统的整体架构,画出它的结构简图,并确定安全保护系统的工作流程,对小车的导轨进行有限元受力分析,选取合适的导轨型号,对吊杆进行剪力和弯矩力学分析,选取合适的吊杆型号。
参照市面上的玻璃清洁机器人外观,设计玻璃机器人外观配色。
最后用三维软件Solidwork绘制零件图和装配图,用AutoCAD修改装配图和零件图的细节。
关键词:单吸盘;力学分析;有限元;安全保护系统Research and development of glass cleaning robot-Designof adsorption mechanismAbstractThe task of this project is to design the adsorption mechanism and mobile mechanism of glass cleaning robot. Through the comparison and analysis of various adsorption mechanisms and mobile mechanisms on the market. In this paper, the scheme of using single suction cup negative pressure adsorption mechanism and safety protection system mechanism is proposed. The force of glass cleaning robot is analyzed, the adsorption capacity and sealing device of suction cup are analyzed, single suction cup is selected as the adsorption device, and the model of impeller drive motor is determined. Design the overall structure of the safety protection system, draw its structural diagram, and determine the work flow of the safety protection system, carry out the finite element stress analysis on the trolley's guide rail, select the appropriate guide rail model, carry out the shear and bending moment mechanical analysis on the suspender, and select the appropriate suspender model. According to the appearance of glass cleaning robot on the market, design the color matching of glass robot appearance.Finally, 3D software SOLIDWORK is used to draw the part drawing and assembly drawing of robot body, and AutoCAD is used to modify the details of assembly drawing and part drawing.Keywords: single suction cup; mechanical analysis; finite element; safety protection system目录1 绪论 (2)1.1研究的现状及其意义 (2)1.2 玻璃清洁机器人的研究现状 (3)1.2.1国内研究现状 (3)1.2.2国外研究现状 (4)1.3玻璃清洁机器人类型 (6)2 玻璃清洁机器人总体方案 (8)2.1机器人设计 (8)2.2机器人总体结构 (8)3 吸附机构和驱动机构 (10)3.1吸附机构设计 (10)3.1.1吸附条件分析和计算 (10)3.1.2吸附机构设计 (12)3.1.3驱动电机选择 (13)3.2移动机构设计 (15)3.2.1 机器人安全保护系统 (15)3.2.2安全保护系统工作流程 (17)3.2.3导轨选材 (17)3.2.4对导轨进行有限元分析 (19)3.2.5吊车的杆力学分析 (25)4 机器人外观 (30)5 结论 (32)参考文献 (33)附录 ................................................................................................................... 错误!未定义书签。
擦玻璃机器人设计方案

擦玻璃机器人设计方案1. 引言随着人工智能和机器人技术的发展,智能家居设备受到了越来越多的关注。
在智能家居设备中,擦玻璃机器人被广泛应用。
它能够自动擦拭窗户和玻璃表面,为用户提供便利。
本文将介绍一种擦玻璃机器人的设计方案,包括机器人的硬件和软件设计等内容。
2. 设计方案2.1 硬件设计擦玻璃机器人的硬件设计包括机器人结构、传感器、执行器等方面。
2.1.1 机器人结构擦玻璃机器人的结构应具有稳定性和灵活性。
设计一个轻巧、坚固的机器人框架,并在其上安装能够自由移动的擦拭模块。
2.1.2 传感器擦玻璃机器人需要搭载多个传感器来感知周围环境,包括距离传感器、倾斜传感器等。
距离传感器用于测量机器人与窗户之间的距离,倾斜传感器用于检测机器人是否垂直于窗户表面。
2.1.3 执行器擦玻璃机器人需要装备执行器来完成擦拭任务。
常用的执行器包括轮子和电动机,以及机械臂和刷子等。
机械臂用于固定机器人在窗户上,刷子用于擦拭玻璃表面。
2.2 软件设计2.2.1 控制算法擦玻璃机器人的控制算法需要保证机器人能够准确地擦拭玻璃表面。
控制算法可以采用视觉识别技术来定位玻璃表面,并根据传感器的反馈来调整机器人的动作。
2.2.2 自动避障擦玻璃机器人在工作过程中需要自动避免障碍物。
设计一个避障算法,将传感器数据与机器人的运动轨迹相结合,使机器人能够相应地避开障碍物。
2.2.3 用户界面为了方便用户操作,擦玻璃机器人需要设计一个用户界面。
用户界面可以通过手机应用程序或者触摸屏来实现,用户可以通过界面控制机器人的运动和开始/停止擦拭任务。
3. 实施计划3.1 硬件实施按照设计方案,实施机器人的硬件部分,包括机器人结构的制作、传感器和执行器的安装等。
确保机器人结构稳定、传感器准确无误,并能够正常工作。
3.2 软件实施按照设计方案,实施机器人的软件部分,包括控制算法的编码、避障算法的实现以及用户界面的开发。
测试软件的功能,确保机器人能够根据用户界面的指示进行操作,并能够自动避免障碍物。
玻璃清洁机器人结构设计--壁面清洗机器人说明书
玻璃清洁机器人结构设计摘要本文首先对玻璃清洁机器人这个课题的来源、目的及意义进行了阐述,简单介绍了国内外玻璃清洁机器人的发展情况,对玻璃清洁机器人的几种不同的移动方式及吸附方式进行了比较,最后采用了多吸盘的框架式结构,具有结构简单、操作方便等优点。
接着对玻璃清洁机器人的总体方案进行了设计,设计了行走机构以及转向机构,通过平动气缸与腿部气缸来实现机器人的移动,并且通过对玻璃吸附可靠性的分析选择了吸盘、吸盘支座及快拧接头等部件,还对其它的气动元件进行了选型,并且绘制了气压系统图。
关键词:玻璃清洁机器人; 多吸盘的框架式结构; 行走机构; 转向机构;ABSTRACTThis paper on the glass cleaning robot source, purpose and significance of the topic, introduces the development situation of glass cleaning robots at home and abroad, several different mobile ways of glass cleaning robot and adsorption methods were compared, and finally adopted more suction cup frame type structure, has the advantages of simple structure, convenient operation. Then for glass cleaning robot design, the overall scheme of the walking mechanism and steering mechanism design, through the translation of cylinder and the leg cylinder to realize the movement of the robot, and through the analysis of the surface adsorption reliability choose chuck, chuck support and quick screw connector components, such as also for other pneumatic components selection, and map the pneumatic system.Keywords: glass cleaning robot; Suction cup frame type structure; Walking agencies; Steering mechanism;目录摘要 (I)ABSTRACT (II)1 绪论 (1)1.1 爬壁机器人 (1)1.2 课题的目的与意义 (2)1.3 国内外玻璃清洁机器人的研究现状 (2)1.4 课题主要内容及技术参数 (4)1.5 本章小结 (4)2 玻璃清洁机器人的方案确认 (5)2.1 玻璃清洁机器人的组成 (5)2.2 玻璃清洁机器人的方案确认 (6)2.3 本章小结 (6)3 玻璃清洁机器人的总体设计 (7)3.1 行走机构的设计 (7)3.1.1 平动气缸的设计与校核 (7)3.1.2腿部气缸的设计与校核 (12)3.3 转向机构的设计 (14)3.2.1 步进电机的选型 (14)3.2.2 蜗轮蜗杆的设计与校核 (15)3.3 吸附装置的选取 (18)3.3.1 吸附可靠性分析 (18)3.3.2 吸附装置的选取 (20)3.4 玻璃清洁机器人的框架以及吸盘安装板的设计 (22)3.4.1 下框架的设计 (23)3.4.2 上框架的设计 (23)3.4.3 中间旋转板的设计 (24)3.4.4 吸盘安装板的设计 (24)3.5 控制阀及其它气动元件的选取 (25)3.5.1气源处理组件的选取 (25)3.5.2 方向控制阀的选取 (25)3.5.3 单向节流阀的选取 (26)3.5.4 真空安全阀的选取 (27)3.5.5 分气块的选取 (27)3.5.6 气电压力转换器的选取 (27)3.5.7 真空发生器的选取 (28)3.6气动原理图的设计 (28)3.7 本章小结 (29)结论 (30)参考文献 (31)致谢 (32)1 绪论1.1 爬壁机器人捷克的剧作家卡雷尔·凯培尔最先提出了机器人这个词语,体现出了人类想要创造出一种能够模仿人的行动的机器,从而能代替人类去进行不同的工作的一种长久的愿望。
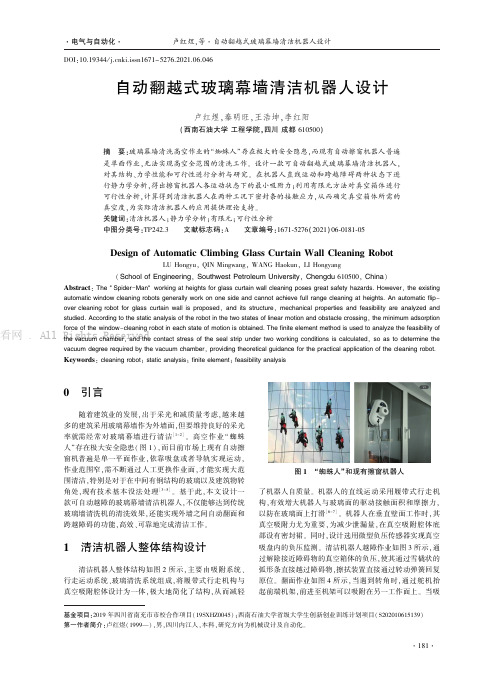
自动翻越式玻璃幕墙清洁机器人设计
(1)
3F P -( Ν1 +Ν2 +Ν3 +Ν4 +Ν5 )= 0
(2)
F P l+2F P l+3F P l-N4 l-2N3 l-3N2 l-4N1 l-Gh = 0
(3)
所受平衡力矩为
设密封条与玻璃壁面间的摩擦系数为μ 1 ꎻ履带与玻璃
壁面间的摩擦系数为μ 2 ꎻ清洁刷与玻璃壁面间的摩擦系数
vacuum degree required by the vacuum chamberꎬ providing theoretical guidance for the practical application of the cleaning robot.
Keywords: cleaning robotꎻ static analysisꎻ finite elementꎻ feasibility analysis
电气与自动化
卢红煜ꎬ等自动翻越式玻璃幕墙清洁机器人设计
附稳定后ꎬ再抬起后端机架缓慢前进从而完成整个换面
1
(5)
Ν1 +Ν5
μ
G
+ æç 1- s ö÷
3( μ 1 +μ 2 ) è μ 1 +μ 2 ø
3
(6)
FP =
3
2
f 2 = f 3 = f 4 = μ 1 Ν+μ 2 Ν = ( μ 1 +μ 2 ) Ν
l
(16)
引入安全系数 kꎬ并联立式(14) 、式(16) ꎬ得吸盘吸附
力范围:
{
F Pm = kMax
(
1
λ1
1 ∂W
+ )
) ( ∂W
∂I λ
∂I
1
1
2
1
C
λ1 01
玻璃清洁机器人吸附机构设计含全套说明书和CAD图纸
题目:玻璃清洁机器人吸附机构设计摘要高楼玻璃幕墙清洗机器人是特种机器人的一个分支。
它是基于壁面移动机器人技术,并针对具体的作业对象,具有明确功能的实用机器人,其工作在垂直危险的玻璃壁面,能够克服重力的作用,携带清洗设备,是面向现代高层建筑玻璃外墙表面保洁、清洗服务的极限作业机器人。
论文首先对机器人总体方案进行介绍,提出了分层次规划的体系结构。
在此基础上,对机器人总体结构进行了设计分析,并应用有关计算理论和计算软件进行了主要参数设计和关键部件的结构设计,讨论了机器人的作业路径,运动控制规划及吸附机构的设计,最后,应用Pro/ENG三维软件针对所设计的机器人建立了三维实体模型。
关键词:玻璃幕墙清洗,机器人,运动分析ABSTRACTGlass-wallcleaning robot isone of robotfor l imited operation,whichcan walk on Vertical glass-wall with washing devices.It is arobot with specific applied functions,Based on wall-climbing robot techniques.forspecific objects.And it works on vertical Glass-wall,whereis dangerousfor human beings.It isa robot could conquer the gravity effect and carry cleaningequipments,facing to glass-wall surface beautifying service of modern high-rise buildings.Firstly, the whole frame ofthe glass wall cleaning robot is introduced, and theLevel-based planning is discussed also. Based on this, th edesigning and analyzing Ofthe structure of the robot are described in details,the main parameters designing and structure designing of the key parts are also processed by using some of correlative calculating theories andsoft .Then,mission-orientedand localmotion planningare discussed.At last,three-dimensional model of the robot are established byMeans ofPro/ENGINEER,soft.Key words:Glass-wallcleaning robotvacuum adsorption system目录摘要2ﻩABSTRACT ................................................ 21前言. (3)2机器人总体方案规划 (4)2.1 机器人设计思想 (4)2.2外形尺寸选择6ﻩ3 吸附机构.............................................. 63.1吸附方式 (6)3.1.1吸附方式选择7ﻩ3.1.2吸盘结构简图7ﻩ3.1.3机器人控制原理图8ﻩ3.2吸附力分析 (9)3.2.1 材料选择9ﻩ3.2.2吸附力计算10ﻩ3.2.3系统抗倾覆计算........................... 103.3其他机构的选择11ﻩ3.3.1射流器选择11ﻩ3.3.2水泵和水管的选择........................ 123.3.3密封机构 (12)4 总结14ﻩ参考文献 (15)致谢16ﻩ1前言在现代都市中,高层建筑越来越多,各种各样的摩天大楼成为现代都市中一道亮丽的风景。
基于负压吸附的飞机玻璃清洗机器人系统设计

在机器人移动过程中,传感器对玻璃表面的污垢和残留物检测精 度还有待提高,需要进一步研究高精度传感器技术。
自动化程度不足
目前机器人的操作还需要人工遥控,未来可以研究自动识别和自动 控制技术,提高机器人的自动化程度。
应用前景与推广价值
广泛应用前景
基于负压吸附的飞机玻璃清洗机器人系统具有广泛的应用前景,可以应用于 各种飞机型号的玻璃清洗,提高飞机清洗效率和降低人工成本。
优化建议
1)改进喷头设计以提高清洗效果;2)增加机器人移动路径规划功能以适应 不同形状的飞机玻璃;3)提高吸附和脱附速度以缩短作业时间。
04
基于机器学习的清洗机器人控制系统 设计
机器学习算法选择与实现
算法选择
根据清洗机器人控制系统的需求,选择适合的机器学习算法,例如深度学习、强 化学习等。
算法实现
高清洁度
飞机玻璃清洗要求彻底清除污垢和 痕迹,确保视野清晰,提高飞行安 全性。
适应各种表面
飞机玻璃具有不同的形状和曲率, 清洗机器人需要能够适应各种表面 ,确保稳定的吸附和清洗。
高效清洗
为了提高效率,清洗机器人应能够 在短时间内完成清洗任务,同时减 少重复和不必要的动作。
远程控制
为了方便操作和维护,清洗机器人 应具备远程控制功能。
实验结果与分析
吸附性能
在实验中,清洗机器人在负压作用下成功地吸附在模拟 飞机玻璃板上,且在各种表面状况下均能保持良好的附 着力。
清洗效果
使用机器人清洗后,模拟飞机玻璃板的表面污渍被有效 地清除,清洁效果良好。
脱附性能
关闭负压发生器后,机器人能够顺利地从玻璃板上脱离 。
性能评估与优化建议
性能评估
本次实验表明,基于负压吸附的飞机玻璃清洗机器人的各项性能均达到预期 目标。
玻璃清洁机器人吸附机构设计
对壁面要求高,壁面有凹凸或裂缝时将会有泄露
吸盘尺寸小,机器人更加灵活
推力吸附
风机噪声大啊,机器人重量大,体积大
对壁面适应性强,不存在泄露问题
图1.1是清华大学采用电磁体吸附方式研制的用于储罐表面检测的磁吸附机器人TH-Climber-I[5],行走方式为履带驱动机器人在储罐表面行走检测。实验表明,它具有较高的运动速率、具有很好稳定性和定位精度,其运动速率最大可达8m/min,可以跨越10mm以上的焊缝和表面凸起障碍,角度误差也可控制在0.2度以内。图1.2为加拿大戴尔豪斯大学和香港中文大学研制的壁面移动机器人[6],它的吸附装置使用永磁体吸附履带。使用永磁体方式使机器人吸附于储罐表面,然后电机驱动履带带动机器人在储罐表面移动检测。
Key words:Glass-wall cleaning robot; Combined suction method; Propeller type axial flow fan
目录
第一章引言
1.1课题研究的背景及意义1
1.2国内外对玻璃清洁机器人吸附方式的研究概况1
1.3吸附方式的发展趋势3
1.3.1吸附方式将更多地采用仿生技术4
关键词:玻璃清洁机器人复合吸附方式螺旋桨式轴流风机
Abstract
Glass-curtain-wall-cleaning robot is a wall climbing robot with special functions, with is a branch of special robot. It not only can be used for cleaning the outer surface of the curtain wall of high-rise buildings, can also be used for surface cleaning and checking of special circumstances and special objects. It is a practical robot based on technology of the wall-climbing robot and having a clear function for specific research and development of the robot. Its main function is to overcome the effects of gravity on their own with cleaning equipment for cleaning in the glass-curtain wall-cleaning surface of high-rise buildings so that it can free people from dangers of aerial working environment, thus avoiding accidents,improving the efficiency of cleaning and saving costs. It has a considerable market prospect.
高楼玻璃幕墙清洁机器人结构设计
高楼玻璃幕墙清洁机器人结构设计侯贤州;庄梓嘉;卢桂芳;黄志维【期刊名称】《机电工程技术》【年(卷),期】2024(53)4【摘要】针对高楼玻璃幕墙人工清洁作业所存在的安全风险高、劳动强度大、作业效率低等问题,设计了一种可替代人工作业的玻璃幕墙机器人。
根据实际高楼玻璃幕墙清洁的需求,设计出能实现高楼玻璃幕墙清洁的机器人。
运用SolidWorks对清洁机器人结构进行几何建模,运用有限元分析软件对机器人的运动方式进行分析优化,利用3D打印的技术打印出高空玻璃幕墙清洁机器人结构。
选择STM32芯片对舵机、真空泵、清洁机构的控制,实现清洁机器人的爬行、吸附、清洁等功能。
利用真空泵实现机器人吸附在非水平面上,利用舵机控制机器人的腿部关节移动,利用滚刷实现对幕墙的清洗。
基于仿真与实物实验,计算清洁机器人能在高楼玻璃幕墙上行走所需的吸附力参数,并选用相应的真空泵;计算清洁机器人爬行所需的舵机转动角度;在满足清洁需求的情况下,对清洁机构进行优化。
设计的清洁机器人具有整体尺寸小、行走灵活、通过性强、应用场合广等特点,为高楼玻璃幕墙清洁作业提供了技术方案。
【总页数】4页(P218-221)【作者】侯贤州;庄梓嘉;卢桂芳;黄志维【作者单位】广东科技学院机电工程学院【正文语种】中文【中图分类】TP242【相关文献】1.高楼玻璃幕墙清洗机器人作业系统的研究2.玻璃幕墙清洁机器人的结构设计3.应运而生的玻璃幕墙【清洁机器人】——谈玻璃幕墙清洁自动化4.国内首次机器人爬玻璃幕墙为高楼“体检”在厦门展示因版权原因,仅展示原文概要,查看原文内容请购买。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
题目:玻璃清洁机器人吸附机构设计摘要高楼玻璃幕墙清洗机器人是特种机器人的一个分支。
它是基于壁面移动机器人技术,并针对具体的作业对象,具有明确功能的实用机器人,其工作在垂直危险的玻璃壁面,能够克服重力的作用,携带清洗设备,是面向现代高层建筑玻璃外墙表面保洁、清洗服务的极限作业机器人。
论文首先对机器人总体方案进行介绍,提出了分层次规划的体系结构。
在此基础上,对机器人总体结构进行了设计分析,并应用有关计算理论和计算软件进行了主要参数设计和关键部件的结构设计,讨论了机器人的作业路径,运动控制规划及吸附机构的设计,最后,应用Pro/ENG三维软件针对所设计的机器人建立了三维实体模型。
关键词:玻璃幕墙清洗,机器人,运动分析ABSTRACTGlass-wall cleaning robot is one of robot for limited operation,which can walk on Vertical glass-wall with washing devices.It is a robot with specific applied functions,Based on wall-climbing robot techniques.for specific objects.And it works on vertical Glass-wall,where is dangerous for human beings.It is a robot could conquer the gravity effect and carry cleaning equipments,facing to glass-wall surface beautifying service of modern high-risebuildings.Firstly, the whole frame of the glass wall cleaning robot is introduced, and theLevel-based planning is discussed also. Based on this, the designing and analyzing Of the structure of the robot are described in details,the main parameters designing and structure designing of the key parts are also processed by using some of correlative calculating theories and soft .Then,mission-oriented and local motion planning are discussed.At last,three-dimensional model of the robot are established byMeans of Pro/ENGINEER,soft.Key words:Glass-wallcleaning robotvacuum adsorption system目录摘要 (1)ABSTRACT (1)1前言 (3)2机器人总体方案规划 (4)2.1 机器人设计思想 (4)2.2外形尺寸选择 (5)3 吸附机构 (6)3.1吸附方式 (6)3.1.1吸附方式选择 (6)3.1.2吸盘结构简图 (7)3.1.3机器人控制原理图 (7)3.2吸附力分析 (8)3.2.1 材料选择 (8)3.2.2吸附力计算 (9)3.2.3系统抗倾覆计算 (9)3.3其他机构的选择 (10)3.3.1射流器选择 (10)3.3.2水泵和水管的选择 (11)3.3.3密封机构 (11)4 总结 (13)参考文献 (14)致谢 (15)1前言在现代都市中,高层建筑越来越多,各种各样的摩天大楼成为现代都市中一道亮丽的风景。
在建筑业,由于玻璃的采光性好,保温防潮性能好,彩色玻璃实用美观,高层建筑的外壁越来越多地采用玻璃幕墙结构,但是为了保证建筑外观的整洁美丽,时间一长,就需要对壁面进行清洗,以美化市容市貌。
许多开放性城市都规定,每年应对高楼清洗若干次。
目前高层建筑玻璃幕墙的清洗方法主要有两种,一种是靠升降平台或吊篮承载清洁工进行玻璃幕墙的清洗,虽简便易行,但劳动强度大,工作效率又低,属于高空极限作业对人身安全及玻璃壁面都有很大的威胁性。
另一种是用安装在楼顶的轨道及吊索系统将擦窗机对准窗户进行自动擦洗。
这种方式初次投资成本较高(高达数百万元),而且要求在建筑物设计之初就要考虑擦窗系统,因而限制了其使用,因此急需一种能代替人而又有一定灵活性和适用性的自动机器来完成这项工作,而且玻璃幕墙一般面积较大,大多处于几十米甚至上百米的高处,且周围无可攀援的支架,这就使得玻璃幕墙的清洗成为一项繁重、危险、耗资的工作。
如果用人去清洗,不仅花费高,而且安全难以保证。
特别是目前一些国家和地区已经通过立法对包括擦窗作业在内的人工高空攀爬进行了限制,人们不得不寻找其它解决办法。
高层建筑清洗机器人正是在这种背景下应运而生。
它的出现将极大降低高层建筑的清洗成本,改善工人的劳动环境,提高生产效率,也必将极大地推动清洗业的发展,带来相当的社会效益、经济效益。
因此,国内外多家研究机构都在积极开展此项研究工作。
2机器人总体方案规划2.1 机器人设计思想机器人是传统的机构学与近代电子技术相结合的产物,是计算机科学、控制论、机构学、信息科学和传感技术等多学科综合性高科技产物,它是一种仿人操作、高速运行、重复操作和精度高的自动化设备。
所以该气动清洗机器人系统包括机械结构、运动规划、传感器系统、驱动系统、控制系统等几部分。
由于我们所开发的清洗机器人工作场所的特殊性,本课题在机器人结构上的设计思想是:在保证机器人功能的前提下,力求结构简单、可靠性高、运行稳定。
因为爬壁机器人在行进过程中需要克服自身重力,所以较轻的机器人本体结构是一个需要着重考虑的设计因素。
增加机器结构的灵活性,导致的结果是机械结构变得复杂,需要使用到的机械元器件增多,重量必然增加,同时控制的复杂性也增加。
高楼幕墙清洗机器人是一种爬壁机器人,因此,它必须具备两大功能:负壁和移动功能。
在本机器人系统中,考虑到机器人要有清洗功能,我们就到了水作为清洁剂来清洗,在提供水的过程中,我们又把它当做动力源,可以说只要有水就能让它工作。
因此我们主要考虑到了用水射流式清洗机器人。
水射流式清洗机器人,巧妙地把供水,供能,抽气整合为一体。
利用清洁水流经射流发射器时产生的负压来控制吸盘,机器人可以抽真空吸附在玻璃上。
这样就不像现已有的机器人那样,需要带上一个大大的气泵。
再利用水流经射流发射器产生的被压来推动活塞杆,实现机器人的爬行驱动。
为此,我们在结构上采用了2个带活塞杆吸盘互相运动,来实现机器人的一直往前爬行运动,而避免只有一个活塞吸盘能实现的往复运动。
在再整体结构上带上2个拖把,随着机器人的移动而移动来擦洗玻璃。
结构如图1 这种结构的该机器人,总体来说,具有如下特点:1,模块化设计,整个外形由同一种高分子有计划和工程材料组成,便于连接和控制。
2,结构简单紧凑,重量轻,同一动力实现吸附和爬行运动两种功能,减少动力来源。
便于协调控制。
图1 外形图2.2外形尺寸选择因吸盘带有活塞杆,我们把吸盘设计成长方体,为减轻整体重量,尽量把它设计简单,轻巧,受力面积相对厚度尽量大,使负压大,重量轻,保证机器人牢牢吸附在玻璃上。
则所选尺寸如下:长L=150mm,宽B=100mm;厚H=40mm,壁厚h=10mm;设计行程为s=50mm其它尺寸选择:活塞厚d=30mm,杆截面取矩形,长l=30mm,宽b=15mm两个拖把直接连接在吸盘的外壁上,体积与整体结构相配合,重量轻。
3 吸附机构3.1吸附方式3.1.1吸附方式选择爬壁机器人最主要的一个特点是机器人可以克服重力作用,在一点倾斜度,垂直或倒立的壁面上具有静止及移动的能力。
目前爬壁机器人吸附方式主要包裹磁吸附,负压吸附,螺旋桨推压等,今年来又出来现了胶吸附,仿壁虎足的干吸附,仿蜗牛的湿吸附,类攀岩抓持吸附,该类吸附方式只适合在导磁面上吸附;低真空度负压吸附采用风机旋转将负压腔内的空气抽出产生负压来吸附,具有一定的壁面适应能力,但存在噪音大,体积大的缺点;高真空度负压吸附方式则由真空泵在真空吸盘内产生一定得真空度,其具有噪音小,易于小型化集成的优点,但对壁面的光洁度及透气性有较高的要求;螺旋桨推压靠合理布置螺旋桨的角度,利用螺旋桨旋转产生的推力将机器人贴附在壁面上,但也存在噪音大的缺点。
由于负压吸附具有适用面广,不受壁面材料限制,而且低负压真空吸附的爬壁机器人具有壁面适应能力强和运动速度快等优点,因此目前负压吸附在爬壁机器人中得到广泛的应用。
真空泵式要带一个大大的气泵,且设计要求需要清洁水擦玻璃,固采用水射流式抽气吸附。
这种方案前面已经提到,它的工作形式主要是用水泵把水抽到吸盘里后,经射流器力射流泵提供的动力,再把水经喷头往外喷,把里面的空气带走,喷完后,吸盘内外形成负压,把吸盘吸住。
水主要是往两侧喷,避免水喷在中间的路径上影响机器人的吸附和运动,而且,机器人的拖把也固定在两侧,喷完水后,水正好配合运动过程中的擦洗功能。
3.1.2吸盘结构简图由于吸盘也是机器人运动时类是于液压缸机构,其结构图如图2所示:它是长方形吸盘,工作时最多只有一半用来射流喷水产生吸附,实现机器人的吸附功能。
图2 吸盘结构简图3.1.3机器人控制原理图机器人的吸附与运动机构都要水的参与,工作过程如下:1:2YA通电,工作腔1冲水,满后,2YA断电,与此同时,1腔里的水经射流发射器喷出,带走里面的空气,形成负压,使得吸盘A吸附在玻璃上。
2:此时,4YA通电,3腔进水,满后,1YA通电,使2腔进水,推动活塞杆a向前移动,拉动吸盘B往前移动,活塞至中间位置后,压下行程开关。
3:此时,1YA,4YA断电,3腔再次水满,3腔水经水射流发射器喷水,产生负压,吸住吸盘B.4:此时,2YA通电,1腔进满水后,3YA通电,使4腔进水,推动活塞杆b前进,使其推动吸盘A前进,活塞杆至中间位置后压下行程开关,2YA,3YA 断电,此时1再次充满水,再射流,如此循环下去,实现机器人的爬行运动。
图3 机器人控制原理图3.2吸附力分析3.2.1材料选择要实现机器人的吸附和运动,在吸附力面积有限,而又有水的自身重力的情况下,保证机器人不掉下了,就必须要求材料轻。
而要保证来自水的驱动而不变形或破裂,就要求这种材料满足机器人所必须的强度和硬度。