4.4(Functional Description)-Self-test(自我测试)
bosch rexroth 4 3-4 2 直流电磁阀 手册说明书

4/3 - 4/2 Directional valves L50A0… (LC04-A)Replaces: 07.12 solenoid operatedRE 18305-11Edition: 06.2022▶Size 4▶Series 00▶Maximum operating pressure 310 bar (4500 psi)▶Maximum fl ow 25 l/min (6.6 gpm)ContentsOrdering details 2Functional description 4Technical data 5Characteristic curves 7External dimensions and fi ttings 8Electric connection 9 L50A0… (LC04-A)General specifi cations▶Direct solenoid operated spool valve, standard version.▶Spool switching is by on off solenoids with a centraltube and removable coil.▶Spring centered control spool.▶For mounting on industry standard surfaceport pattern to CETOP RP121 H-4.2-P02.▶Wet pin DC solenoids with removable coil and manualoverride.▶Manual override as option (push or screw-in type).▶Coil can be rotated through 360°.▶Available electrical connections: DIN 43650 – ISO 4400,AMP JUNIOR, DT04-2P (Deutsch), Free leads.RE 18305-11/06.2022,2L50A0… (LC04-A) | 4/3 - 4/2 Directional valves Ordering detailsOrdering details0102030405060708 L50A0Family01Directional Valves L Type02CETOP Valves5 Size03NG 4 (P02)0 Operation04Solenoid operated D36 coil A0 Spool variants054/3 operated A and B side_ 2 _ _ 4/2 operated A and B side_ 2 _ _ 4/2 operated A side_ 3 _ _ 4/2 operated B side_ 4 _ _ 4/2 operated A and B side with detent_ 5 _ _ Voltage supply31070403010006Without coil–––––●0012 V DC●●●●●–OB24 V DC●●●●●–OC48 V DC–●●●●–OD96 V DC––––●–OU205 V DC––––●–AH Electric connections07Without coils00 With coils, without mating connector011) DIN EN 175301-803With coils, with bi-directional diode, without mating03 connector vertical Amp-JuniorWith coils, with bi-directional diode, without mating04 connector horizontal Amp-JuniorWith coils, with bi-directional diode, without mating07 connector DT04-2PWith coils and bipolar sheathed lead31 300mm (11,8 in) longOptions08Standard00 External push button manual override EPScrew-in type manual override EF●=Available–=Not available1) For connectors ordering code see data sheet RE 18325-90., RE 18305-11/06.2022RE 18305-11/06.2022, 4/3 - 4/2 Directional valves | L50A0… (LC04-A)Ordering details3Spool variants=A201=C201=E201AB_ 2 _ _P T ababAB_ 2 _ _P T ababAB_ 3 _ _P T aaAB_ 4 _ _P T 0bbAB_ 5 _ _P Tabab=G209=K209=L201=N201=L501=N501=A301=B301=C301=D301=E301=K301=T301=Y301=A401=B401=C401=D401=E401=K401=T409=Y401=B201=D201=G201=K201=M201=M501=A361=B361=C361=D361=E361=N301=X301=A471=B471=C471=D471=E471=N401=X4014L50A0… (LC04-A) | 4/3 - 4/2 Directional valves Functional descriptionFunctional descriptionType L50A0The solenoid operated valves type L 50A0 provide 3-way or 4-way fl ow control, usually from port P to either port A or B, and the consequent fl ow return to T from B or A respectively.The valves are composed by a central cast iron body (1) which mounts on industry standard surfaces where thefl ow ports and the installation holes are located; the central body houses the precisely machined directional control spool (2) which is held in the neutral or initial position by the return springs (4). One or two solenoids, composed by a central tube and a surrounding coil (5), are fi tted to the body at the spool’s ends: when the coils are energized, their magnetic fi eld develops a force on the oil immersed mobile plunger incorporated in the tube which pushes the control spool from the initial position into a shifted position where oil fl ow is allowed from P to either A or B.With coils (5) de-energized, the control spool (2) returns to the central or initial position pushed by the washers (3) supported by the return springs (4).The coils (5) are locked on the tube by threaded plastic nuts (6); the tube incorporates an externally reachable push rod (7) which can pushed for emergency spool shifting in case of electric failure.Type L50A0L201_, L50A0M201_, L50A0N201_These valves do not have return springs (4) for the directional control spool (2): the spool can shift between two positions, driven only by the magnetic force developed by the two solenoids (5), and, when the solenoids are not energized, the neutral position of the spool is not defi ned. The directional control spool holds a specifi c position only when one of the solenoids is maintained energized.Type L50A0L501_, L50A0M501_, L50A0N501_In these valves the directional control spool has two switched positions, each one with a mechanical detent. Shifting of the spool’s position is achieved by energizing one of the solenoids, but it is unnecessary to maintain the coil energized in order to keep the spool shifted., RE 18305-11/06.20224/3 - 4/2 Directional valves| L50A0… (LC04-A)5Technical dataTechnical dataVoltage tolerance (nominal voltage)%-10 .... +10Duty Continuous, with ambient temperature ≤ 50°C (122°F)Coil wire temperature not to be exceeded°C (°F)180 (356)Insulation class HCompliance with Low Voltage Directive LVD 73/23/EC (2006/95/EC), 2004/108/EC Coil weight with connection EN 175301-803kg (lbs)0.18 (0.40)Voltage V12244896205 Voltage type DC DC DC DC DC Power consumption W2020202020 Current (nominal at 20 °C (68 °F))A 1.620.840.450.210.01 Resistance (nominal at 20 °C (68 °F))Ω7.428.4106.44512062NoteFor applications with diff erent specifi cations consult us.RE 18305-11/06.2022,6L50A0… (LC04-A) | 4/3 - 4/2 Directional valves Technical data(Ex. DIN 43650)NoteFor further versions (i.e. cable single lead) contact factory., RE 18305-11/06.2022RE 18305-11/06.2022, 4/3 - 4/2 Directional valves | L50A0… (LC04-A) Characteristic curves7Characteristic curvesMeasured with hydraulic fl uid ISO-VG32 at 45° ±5 °C (113° ±9 °F); ambient temperature 20 °C (68 °F).Performance limits5 1 4 3 2bar350300250200150100500 5 10 15 20 25l/min 0 1 2 3 4 5 6 6.6 gpmpsi 50004000300020001000P r e s s u r e pFlow QB201; B301; B401; B361; B471; C201; C301; C401; C361; C471; L201; L501; M201; M5012E201, E301, E401; E361; E471; D201, D301, D401; D361; D471; K201, K209; K301; K401; T301; T4093X301; X401; Y301; Y4014N201; N301; N401; N5015The performance curves here shown are applicable when oil fl ow is travelling in both directions, example P>A and B>T. In special circuit schemes the performance limits can be lower.G201, G209B201, B301, B401 5577B361, B4715588C201, C301, C401, C361, C471, D201, D301, D401; D361, D47166688E201, E301, E401, E361, E471, K201, K209, K301, K4015588L2015587L5013577M2013376M5012365N20133N30125N40152N50123T301, T40955X301, Y3013586X401, Y4015368P r e s s u r e Δp1 2 3 4 5 6 7 80 5 10 15 20 25 l/min bar 2016128400 1 2 3 4 5 6 6.6 gpmpsi 290250200150100500Flow Q8L50A0… (LC04-A) | 4/3 - 4/2 Directional valvesExternal dimensions and fi ttingsDimensions [mm (inches)] External dimensions and fittings1 Solenoid tube O 16mm (0.63inch).2 Blinding plug for 2 positions version.3 Ring nut for coil locking O 26,5 mm (1,04inch).Torque 3 – 4 Nm (2.2 – 3.0 ft-lb).4 Drilling specifi cations of standard mounting surface according toCETOP RP 121 H-4.2 4-P02.5 Locking screws 3 pieces: UNI 5931 (ISO 4762) hexagon sockethead cap screw M 5x25, recommended specifi c strength 8.8class. Torque 5 ÷ 6 Nm (3.7÷4.4 ft-lbs).6 Gap needed for connector removal.7 Optional push-button type manual override for spool opening:it is pressure stuck to the ring nut for coil locking.Mat no. R930059524.8 Optional screw type manual override for spool opening: it isscrewed torque 6-7Nm (4.4-5.2 ft-lb) to the tube as replacement of the coil ring nut. Mat no. R930059561.9 Identifi cation label., RE 18305-11/06.2022RE 18305-11/06.2022, 4/3 - 4/2 Directional valves | L50A0… (LC04-A)Electric connection9Dimensions [mm (inches)]E lectric connection 0001()()()()()()03Protection class: IP 65 with female connectorproperly fi tted (see drawing).04Protection class: IP 65 with female connectorproperly fi tted (see drawing).()()()()()()()()()()()()()3107Protection class: IP 69 K with female connector properly fi tted (see drawing).()()()()()()()()()()()()()()10, RE 18305-11/06.2022Bosch Rexroth Oil Control S.p.A.Oleodinamica LC Division Via Artigianale Sedrio, 1242030 Vezzano sul Crostolo Reggio Emilia - Italy Tel. +39 0522 601 801Fax +39 0522 606 226 / 601 802***************************************/compacthydraulics© This document, as well as the data, specifi cations and other information set forth in it, are the exclusive property of Bosch Rexroth Oil Control S.p.a.. It may not be reproduced or given to third parties without its consent.The data specifi ed above only serve to describe the product. No statements concerning a certain condition or suitability for a certain application can be derived from our information. The information given does not release the user from the obligation of own judgment and verifi cation. It must beremembered that our products are subject to a natural process of wear and aging.Subject to change.。
国家开放大学《商务英语4》Unit 4 Self-test试题及答案
一、选择填空题(每题10分,共5题)—Betty, we'll have a buffet party next Saturday. Will you join us?—_______ , Susan. Thank you!选择一项:A. I'd love toB. I'm afraid notC. By no means反馈你的回答正确解析:本题考核表达“回复邀请”的交际用语。
第一说话人邀请对方参加聚会,听者表示有兴趣参加,所以答案是A。
正确答案是:I'd love to—I had a really good weekend at the seaside.—____________.选择一项:A. Oh, that's very nice of youB. Oh, I'm glad to hear thatC. It's a pleasure解析:本题考核表达“赞赏”的交际用语。
第一说话人谈到在海边度过愉快的周末,选项A 表示感谢;选项B表示赞赏,选项C表示很乐意,所以答案是B。
正确答案是:Oh, I'm glad to hear thatTrademarks, proprietary service marks and regulations need _____ carefully.选择一项:A. to be observedB. be observedC. being observed译文:要认真遵守商标权、专属服务标志权和规章制度。
解析:句中need表示“需要,应该……”时,是实意动词,后面可以接动词不定式作宾语,但是动词不定式observe与主语之间是被动关系,所以答案是A。
正确答案是:to be observedWe didn't understand how difficult it was to ____ such a breakfast.选择一项:A. districtB. distributeC. distract译文:我们不明白配销这样一份早餐有多么困难。
AU6805规格书英文版_(正式版)

74LVC245A; 74LVCH245A 八位总线收发器; 3-state 产品数据手册说明书

74LVC245A; 74LVCH245AOctal bus transceiver; 3-stateRev. 9 — 11 September 2018Product data sheet1. General descriptionThe 74LVC245A; 74LVCH245A are 8-bit transceivers featuring non-inverting 3-state buscompatible outputs in both send and receive directions. The device features an output enable(OE) input for easy cascading and a send/receive (DIR) input for direction control. OE controls theoutputs so that the buses are effectively isolated.Inputs can be driven from either 3.3 V or 5 V devices. When disabled, up to 5.5 V can be applied tothe outputs. These features allow the use of these devices in mixed 3.3 V and 5 V applications.The 74LVCH245A bus hold on data inputs eliminates the need for external pull-up resistors to holdunused inputs.2. Features and benefits• 5 V tolerant inputs/outputs for interfacing with 5 V logic•Wide supply voltage range from 1.2 V to 3.6 V•CMOS low-power consumption•Direct interface with TTL levels•Inputs accept voltages up to 5.5 V•High-impedance when V CC = 0 V•Bus hold on all data inputs (74LVCH245A only)•Complies with JEDEC standard:•JESD8-7A (1.65 V to 1.95 V)•JESD8-5A (2.3 V to 2.7 V)•JESD8-C/JESD36 (2.7 V to 3.6 V)•ESD protection:•HBM JESD22-A114F exceeds 2000 V•MM JESD22-A115B exceeds 200 V•CDM JESD22-C101E exceeds 1000 V•Specified from -40 °C to +85 °C and -40 °C to +125 °C3. Ordering information4. Functional diagram5. Pinning information5.1. Pinning74LVC245A 74LVCH245ADIR V CC A0OE A1B0A2B1A3B2A4B3A5B4A6B5A7B6GND B7001aak2921234567891012111413161518172019Fig. 3.Pin configuration SOT163-1 (SO20),SOT339-1 (SSOP20) and SOT360-1 (TSSOP20)001aak29374LVC245A 74LVCH245AT ransparent top viewB6A6A7B5A5B4A4B3A3B2A2B1A1B0A0OE G N D B 7D I R V C C9128137146155164173182191011120terminal 1 index areaGND (1)(1) This is not a supply pin. The substrate is attached to this pad using conductive die attach material. There is no electrical or mechanical requirement to solder this pad. However, if it is soldered, the solder land should remain floating or be connected to GND.Fig. 4.Pin configuration SOT764-1 (DHVQFN20)5.2. Pin description6. Functional descriptionTable 3. Function selectionH = HIGH voltage level; L = LOW voltage level; X = don’t care; Z = high impedance OFF-state.7. Limiting valuesTable 4. Limiting valuesIn accordance with the Absolute Maximum Rating System (IEC 60134). Voltages are referenced to GND (ground = 0 V).[1]The minimum input voltage ratings may be exceeded if the input current ratings are observed.[2]The output voltage ratings may be exceeded if the output current ratings are observed.[3]For SO20 packages: above 70 °C derate linearly with 8 mW/K.For (T)SSOP20 packages: above 60 °C derate linearly with 5.5 mW/K.For DHVQFN20 packages: above 60 °C derate linearly with 4.5 mW/K.8. Recommended operating conditions9. Static characteristicsTable 6. Static characteristicsAt recommended operating conditions. Voltages are referenced to GND (ground = 0 V).[1]All typical values are measured at V CC = 3.3 V (unless stated otherwise) and T amb = 25 °C.[2]The bus hold circuit is switched off when V I ˃ V CC allowing 5.5 V on the input terminal.[3]For I/O ports the parameter I OZ includes the input leakage current.[4]Valid for data inputs of bus hold parts only (74LVCH245A). Note that control inputs do not have a bus hold circuit.[5]The specified sustaining current at the data input holds the input below the specified V I level.[6]The specified overdrive current at the data input forces the data input to the opposite input state.10. Dynamic characteristicsTable 7. Dynamic characteristicsVoltages are referenced to GND (ground = 0 V). For test circuit see Fig. 7.[1]Typical values are measured at T amb = 25 °C and V CC = 1.2 V, 1.8 V, 2.5 V, 2.7 V and 3.3 V respectively.[2]t pd is the same as t PLH and t PHL.t en is the same as t PZL and t PZH.t dis is the same as t PLZ and t PHZ.[3]Skew between any two outputs of the same package switching in the same direction. This parameter is guaranteed by design.[4]C PD is used to determine the dynamic power dissipation (P D in μW).P D = C PD × V CC2 × f i × N + Σ(C L × V CC2 × f o) where:f i = input frequency in MHz; f o = output frequency in MHzC L = output load capacitance in pFV CC = supply voltage in VoltsN = number of inputs switchingΣ(C L × V CC2 × f o) = sum of the outputs.10.1. Waveforms and test circuit11. Package outlineSO20: plastic small outline package; 20 leads; body width 7.5 mm SOT163-1Fig. 8.Package outline SOT163-1 (SO20)SSOP20: plastic shrink small outline package; 20 leads; body width 5.3 mm SOT339-1Fig. 9.Package outline SOT339-1 (SSOP20)TSSOP20: plastic thin shrink small outline package; 20 leads; body width 4.4 mm SOT360-1Fig. 10.Package outline SOT360-1 (TSSOP20)DHVQFN20: plastic dual in-line compatible thermal enhanced very thin quad flat package; no leads;Fig. 11.Package outline SOT764-1 (DHVQFN20)12. Abbreviations13. Revision history14. Legal informationData sheet status[1]Please consult the most recently issued document before initiating orcompleting a design.[2]The term 'short data sheet' is explained in section "Definitions".[3]The product status of device(s) described in this document may havechanged since this document was published and may differ in case ofmultiple devices. The latest product status information is available onthe internet at https://.DefinitionsDraft — The document is a draft version only. The content is still under internal review and subject to formal approval, which may result in modifications or additions. Nexperia does not give any representations or warranties as to the accuracy or completeness of information included herein and shall have no liability for the consequences of use of such information. Short data sheet — A short data sheet is an extract from a full data sheet with the same product type number(s) and title. A short data sheet is intended for quick reference only and should not be relied upon to contain detailed and full information. For detailed and full information see the relevant full data sheet, which is available on request via the local Nexperia sales office. In case of any inconsistency or conflict with the short data sheet, the full data sheet shall prevail.Product specification — The information and data provided in a Product data sheet shall define the specification of the product as agreed between Nexperia and its customer, unless Nexperia and customer have explicitly agreed otherwise in writing. In no event however, shall an agreement be valid in which the Nexperia product is deemed to offer functions and qualities beyond those described in the Product data sheet.DisclaimersLimited warranty and liability — Information in this document is believedto be accurate and reliable. However, Nexperia does not give any representations or warranties, expressed or implied, as to the accuracyor completeness of such information and shall have no liability for the consequences of use of such information. Nexperia takes no responsibility for the content in this document if provided by an information source outside of Nexperia.In no event shall Nexperia be liable for any indirect, incidental, punitive, special or consequential damages (including - without limitation - lost profits, lost savings, business interruption, costs related to the removalor replacement of any products or rework charges) whether or not such damages are based on tort (including negligence), warranty, breach of contract or any other legal theory.Notwithstanding any damages that customer might incur for any reason whatsoever, Nexperia’s aggregate and cumulative liability towards customer for the products described herein shall be limited in accordance with the Terms and conditions of commercial sale of Nexperia.Right to make changes — Nexperia reserves the right to make changesto information published in this document, including without limitation specifications and product descriptions, at any time and without notice. This document supersedes and replaces all information supplied prior to the publication hereof.Suitability for use — Nexperia products are not designed, authorized or warranted to be suitable for use in life support, life-critical or safety-critical systems or equipment, nor in applications where failure or malfunctionof an Nexperia product can reasonably be expected to result in personal injury, death or severe property or environmental damage. Nexperia and its suppliers accept no liability for inclusion and/or use of Nexperia products in such equipment or applications and therefore such inclusion and/or use is at the customer’s own risk.Quick reference data — The Quick reference data is an extract of the product data given in the Limiting values and Characteristics sections of this document, and as such is not complete, exhaustive or legally binding. Applications — Applications that are described herein for any of these products are for illustrative purposes only. Nexperia makes no representation or warranty that such applications will be suitable for the specified use without further testing or modification.Customers are responsible for the design and operation of their applications and products using Nexperia products, and Nexperia accepts no liability for any assistance with applications or customer product design. It is customer’s sole responsibility to determine whether the Nexperia product is suitableand fit for the customer’s applications and products planned, as well asfor the planned application and use of customer’s third party customer(s). Customers should provide appropriate design and operating safeguards to minimize the risks associated with their applications and products. Nexperia does not accept any liability related to any default, damage, costs or problem which is based on any weakness or default in the customer’s applications or products, or the application or use by customer’s third party customer(s). Customer is responsible for doing all necessary testing for the customer’s applications and products using Nexperia products in order to avoid a default of the applications and the products or of the application or use by customer’s third party customer(s). Nexperia does not accept any liability in this respect.Limiting values — Stress above one or more limiting values (as defined in the Absolute Maximum Ratings System of IEC 60134) will cause permanent damage to the device. Limiting values are stress ratings only and (proper) operation of the device at these or any other conditions above thosegiven in the Recommended operating conditions section (if present) or the Characteristics sections of this document is not warranted. Constant or repeated exposure to limiting values will permanently and irreversibly affect the quality and reliability of the device.Terms and conditions of commercial sale — Nexperia products aresold subject to the general terms and conditions of commercial sale, as published at /profile/terms, unless otherwise agreed in a valid written individual agreement. In case an individual agreement is concluded only the terms and conditions of the respective agreement shall apply. Nexperia hereby expressly objects to applying the customer’s general terms and conditions with regard to the purchase of Nexperia products by customer.No offer to sell or license — Nothing in this document may be interpreted or construed as an offer to sell products that is open for acceptance or the grant, conveyance or implication of any license under any copyrights, patents or other industrial or intellectual property rights.Export control — This document as well as the item(s) described herein may be subject to export control regulations. Export might require a prior authorization from competent authorities.Non-automotive qualified products — Unless this data sheet expressly states that this specific Nexperia product is automotive qualified, the product is not suitable for automotive use. It is neither qualified nor tested in accordance with automotive testing or application requirements. Nexperia accepts no liability for inclusion and/or use of non-automotive qualified products in automotive equipment or applications.In the event that customer uses the product for design-in and use in automotive applications to automotive specifications and standards, customer (a) shall use the product without Nexperia’s warranty of the product for such automotive applications, use and specifications, and (b) whenever customer uses the product for automotive applications beyond Nexperia’s specifications such use shall be solely at customer’s own risk, and (c) customer fully indemnifies Nexperia for any liability, damages or failed product claims resulting from customer design and use of the product for automotive applications beyond Nexperia’s standard warranty and Nexperia’s product specifications.Translations — A non-English (translated) version of a document is for reference only. The English version shall prevail in case of any discrepancy between the translated and English versions.TrademarksNotice: All referenced brands, product names, service names and trademarks are the property of their respective owners.Contents1. General description (1)2. Features and benefits (1)3. Ordering information (2)4. Functional diagram (2)5. Pinning information (3)5.1. Pinning (3)5.2. Pin description (3)6. Functional description (3)7. Limiting values (4)8. Recommended operating conditions (4)9. Static characteristics (5)10. Dynamic characteristics (7)10.1. Waveforms and test circuit (8)11. Package outline (10)12. Abbreviations (14)13. Revision history (14)14. Legal information (15)© Nexperia B.V. 2018. All rights reservedFor more information, please visit: Forsalesofficeaddresses,pleasesendanemailto:*************************** Date of release: 11 September 2018Mouser ElectronicsAuthorized DistributorClick to View Pricing, Inventory, Delivery & Lifecycle Information:N experia:74LVC245AD74LVCH245AD74LVCH245ADB74LVCH245APW74LVC245APW74LVC245ABQ,115 74LVC245AD,11274LVC245ADB,11274LVC245ADB,11874LVC245AD,11874LVC245APW,11274LVC245APW,11874LVCH245ABQ,11574LVCH245AD,11274LVCH245ADB,11274LVCH245ADB,118 74LVCH245AD,11874LVCH245APW,11274LVCH245APW,11874LVC245ABX,11574LVCH245ABX,115 74LVCH245APW/AUJ74LVC245APW/AUJ。
Mini-Circuits HPA-272+ 高功率放大器说明书

HPA-272+ Rack Mounted High-Power Amplifier (100W)700 to 2700 MHzUser’s ManualImportant NoticeThis guide is owned by Mini-Circuits and is protected by copyright, trademark and other intellectual property laws.The information in this guide is provided by Mini-Circuits as an accommodation to our customers and may be used only to promote and accompany the purchase of Mini-Circuits’ Parts. This guide may not be reproduced, modified, distributed, published, stored in an electronic database, or transmitted and the information contained herein may not be exploited in any form or by any means, electronic, mechanical recording or otherwise, without prior written permission from Mini-Circuits.This guide is subject to change, qualifications, variations, adjustments or modifications without notice and may contain errors, omissions, inaccuracies, mistakes or deficiencies. Mini-Circuits assumes no responsibility for, and will have no liability on account of, any of the foregoing. Accordingly, this guide should be used as a guideline only.TrademarksAll trademarks cited within this guide are the property of their respective owners. Neither Mini-Circuits nor the Mini-Circuits HPA-272+ are affiliated with or endorsed or sponsored by the owners of those trademarks.Mini-Circuits and the Mini-Circuits logo are registered trademarks of Scientific Components Corporation. Mini-Circuits13 Neptune AvenueBrooklyn, NY 11235Phone: 1-718-934-4500Email: **********************Web: Version 3/23/16© Mini-Circuits, 2016. All rights reserved.CONTENTS1INTRODUCTION (4)2WARNINGS (5)2.1 Safety Hazards (5)2.2 Additional Precautions (6)3PHYSICAL DESCRIPTION (7)4FUNCTIONAL DESCRIPTION (8)5POWER SPECIFICATIONS AND MAXIMUM RATINGS (9)5.1DC Power Specifications (9)5.2 Maximum Ratings (9)6UNPACKING (10)6.1 Unpacking (10)6.2 Package Contents (10)7LAYOUT AND INSTALLATION (11)7.1 Rack Mounting (11)7.2 Rear Panel Grounding Terminal (11)8OPERATING INSTRUCTIONS (12)8.1 Connecting the Amplifier (12)8.2 Temperature and Fan Monitoring (12)8.2.1 Front Panel LED Indicators (12)8.2.2 Status Monitoring Via the 9-Pin D-Sub Connector (13)9COMPANION PRODUCTS AND APPLICATION CIRCUITS (14)9.1High Power, Multi-Channel Burn-In System (14)9.2Output Power Monitoring (15)9.3Output Power Monitoring with Gain Control (16)9.4High Reliability Test Cables (17)9.5HandFlex® Interconnect Cables (17)RETURN MATERIAL AUTHORIZATION (RMA) (18)1 INTRODUCTION Thank you for choosing Mini-Circuits’ HPA-272+ high power amplifier to meet your needs! The purpose of the this user’s manual is to instruct you on basic installation and setup of your equipment, to advise you on general precautions to be taken when installing and handling the amplifier unit, and to provide basic information on the proper use of this equipment.We’re here to support you every step of the way. For technical support and assistance, please find the following points of contact for your convenience:Chi Man ShumPhone: +1 201 647-1615 Email: *********************** ********************Lee Whiting+44 1252 832 620Email: *******************.com2 WARNINGSMini-Circuits’ HPA-272+ is designed with multiple levels of protection to prevent injury to the user and damage to the amplifier during operation. However, Mini-Circuits stronglyrecommends that you observe standard operating precautions for high-power RF amplifiers to reduce the risk of injury and damage to the amplifier and connected components.2.1 Safety HazardsElectrical DangerThis equipment contains live 85-265V contacts and should be used and handled only by qualified professionals. When performing any activity in and around the HPA-272+ case, please exercise extreme caution to avoid touching any parts where live voltage may be present to prevent injury or death due to electrical shock.Heavy ObjectThe equipment case for your HPA-272+ unit is heavy. When handling, use caution to prevent damage to the equipment and injury. Always follow safe lifting protocols and use any necessary lifting aids to prevent muscle strain or back injury. The unit must be supported in a rack structure by securely fastened side rails or shelving.High Speed FanBladeThe HPA-272+ contains cooling fans with rotating blades that can cause serious injury or cut. Remove any loose articles before working inside the HPA-272+ chassis to avoid getting caught in moving machinery.30 lbs. (13.61 Kg)2.2 Additional PrecautionsMaximum Input Power : The HPA-272+ has a maximum RF input power rating of+7dBm. Exceeding this maximum will likely cause permanent damage to the amplifier.Power Supply: Do not apply RF input signal to the HPA-272+ while the AC mains supplyis disconnected or the amplifier is powered off from the front panel switch. Use only the supplied AC mains power supply lead for connection to a properly grounded 85-265V mains power socket.Air Flow: The equipment chassis must be mounted by the customer to maintain aminimum of 1U (1.75”) free air space above and below the top and bottom panels with unobstructed access to room ambient airflow for proper operation.Electrostatic Discharge: Any person operating this unit must have Electrostatic Discharge (ESD) protection to prevent damage to any components.Opening & Tampering: This equipment is designed to be serviced only by professionalelectrical technicians. Case openings by any person other than qualified personnel authorized by Mini-Circuits or the customer will void any and all terms of the Limited Warranty.11Although top and bottom panels are intended to allow accessibility, it is important to use caution when connecting ordisconnecting any electrical or RF connection, or when moving, removing, or replacing any wires, cables, connections, or components within the chassis to avoid potentially damaging or dislodging any other cables or connections.3 PHYSICAL DESCRIPTION Mini-Circuits’ HPA-272+ high power amplifier comes housed in an aluminum alloy chassis measuring 19” wide x 5.20” (3U) high x 20” deep (482 x 132 x 508mm). The front panel is fitted with an AC power on/off switch, N-Type connectors at the RF input and output ports, a standard 9-pin D-sub socket (see section 8.2.2 Status Monitoring Via the 9-Pin D-Sub Connector), and 3 LED lights indicating AC power connection (green), temperature alarm (red), and fan malfunction alarm (red). The front panel of the unit is also equipped with two handles and marking with the name, model number, frequency range, and saturated output power of unit. Slotted holes on the outer left and right extensions of the front panel allow secure mounting to a standard 19” (483mm) rack support structure.Figure 1: Front panel of HPA-272+ equipment chassisOn the rear panel of the unit is the input for a standard 85-265V AC power supply with caution label (right side). At the right of the rear panel is a clearly marked grounding terminal. It is recommended that this terminal be connected to a Common Bonding Network (CBN). On the left side of the rear panel is an identification sticker containing the model name and serial number. Two cooling fans are mounted to the center of the panel.Figure 2: Rear panel of HPA-272+ equipment chassis4 FUNCTIONAL DESCRIPTION Mini-Circuits’ HPA-272+ is a high-power rack-mountable RF amplifier capable of delivering output power up to 100W across the 700 to 2700 MHz frequency range. The amplifier provides 48 dB gain with ±1.7 dB gain flatness, +55 dBm OIP3 and 89 dB reverse isolation. It operates on a self-contained 85 – 265V AC line power supply. This model features internal cooling and self-protection against over-temperature, and is immune to open and short loads while delivering full power from the output port.The unit features LED indicators on the front panel which illuminate to alert the user when AC power is connected, when the unit temperature exceeds the maximum rating, and when the cooling fans are not functioning properly. The 9-Pin D-Sub socket allows remote monitoring of these conditions in layouts where the front panel is not clearly visible to the operator.The HPA-272+ is an ideal solution for test applications requiring high power over a wide frequency range such as EMI and antenna testing, RF power stress testing, reliability testing and more. It is also highly useful for production test applications in which it is desirable to test many DUTs in parallel such as HTOL. The amplifier can be paired with high power splitters to distribute a test signal through up to 80 channels. See section 9 for more information about applications of this equipment.5 POWER SPECIFICATIONS AND MAXIMUM RATINGS 5.1 AC Power SpecificationsParameter SpecificationSupply Voltage: ~Line85-265V : 47-63 HzPower Consumption 531W (typ.)5.2Maximum RatingsTo prevent damage to your equipment, please do not exceed any of the maximum ratings specified here and on the model data sheet.Table 1: MaximumParameter RatingsOperating Temperature 0˚C to 50˚CStorage Temperature -20˚C to 70˚C (non-condensing)Input RF Power(no damage)+7 dBm6 UNPACKING6.1 UnpackingThe equipment ships in a single large cardboard carton measuring 11 x 25.125 x 23” pictured in the figure below.Figure 5: Shipping cartonWithin the carton, the HPA-272+ unit is protected by pink foam inserts. Remove the unit from the box carefully and set on a stable surface. Be sure not to lose or misplace the power cord contained in the package with the amplifier unit.6.2 Package ContentsTable 2: Package contentsItem DescriptionQuantity HPA-272+ Unit1 CBL-3W-XX+ Black AC Power Cord (US, EU or UK)1Caution: The package and its contents are heavy! Use safe lifting protocols when handling to avoid strain or injury.A: 11” B: 25.125” C: 23”7 LAYOUT AND INSTALLATION7.1Rack MountingThe HPA-272+ equipment chassis should be fastened to rack support structure through the slotted rack mounting holes (4x) on the front panel shown below.Figure 3: Slotted rack mounting holes in front panel of HPA-272+ equipment chassis Chassis must be mounted to maintain a minimum of 1U (1.75”) clearance above top panel and below bottom panel with unobstructed access to room ambient airflow for proper operation.Additionally, due to weight, the unit must be supported by means other than the front panel. This can be facilitated by side rails or by a shelf, sufficiently secured to a standard, high grade, 19-inch equipment rack.7.2 Rear Panel Grounding TerminalThe rear panel of the chassis is constructed with a grounding stud to ground the box. This stud should be connected to a Common Bonding Network (CBN) with 20 gauge or larger copper wire.Figure 4: Rear panel grounding terminal8 OPERATING INSTRUCTIONS8.1Connecting the AmplifierThe HPA-272+ has been designed with multiple levels of protection to prevent avoidable damage to the amplifier during operation. However, Mini-Circuits’ strongly recommends that standard operating precautions for high-power RF amplifiers be observed to reduce risk of damage to the amplifier and connected components.The recommended sequence for connecting the amplifier is as follows:1)Connect AC mains power supply2)Connect output load3)Turn on the AC power using the switch on the front panel4)Apply the RF input signal8.2Temperature and Fan Monitoring8.2.1 Front Panel LED IndicatorsThe HPA-272+ features LED lights on the front panel which provide easy visualconfirmation of the internal temperature and fan status.•The green LED labelled “Power” indicates the unit is connected to an AC power supply and powered on.•The red LED labeled “Temp” indicates an alarm that the temperature inside the unit exceeds the maximum rating.•The red LED labeled “Fan” indicates a fault or mechanical blockage with the cooling fans.Both of the red LEDs should be off during normal operation.Table 3: LED Indicators (Front Panel)Name ColorLED StateOff OnPower Green Power off Power on Temp Red Normal Alarm Shutdown Fan Red Normal Fault8.2.2 Status Monitoring Via the 9-Pin D-Sub ConnectorIn situations where the front panel of the amplifier unit is not clearly visible, the internal temperature and the “health” of the cooling fans can also be monitored remotely via the D-Sub connector on the front panel.Connections to the 9-pin D-Sub socket on the HPA-272+ should be made as shown in table 4 below. The output at pins 1 and 2 will be TTL logic levels indicating the status of the amplifier as follows:•Logic 1 (high) at pin 1 signals over temperature alarm•Logic 1 (high) at pin 1 signals fan malfunction and potential mechanical blockage•Logic 0 (low) at these pins indicates normal operationTable 4: D-Sub Male Connector Pin Functions (Front Panel)Pin # FunctionTTL Logic LevelLow High1 Temperature Alarm Normal Alarm Shutdown2 Fan Alarm Normal Fault3 Ground -- --4-9 No Connection -- --9 COMPANION PRODUCTS AND APPLICATION CIRCUITS9.1High Power, Multi-Channel Burn-In SystemThe HPA-272+ may be combined with Mini-Circuits SSG-6000RC wideband synthesizedsignal generator, ZT-10HPS-27+ high-power(100W) 10-way splitter, and ZT-135 multi-splitter rack (containing 10 independent, 10W,4-way splitters), to deliver a test tone anywherein the 700 to 2700 MHz range into 40 testchannels simultaneously at greater than 1Wper channel.This setup allows dramatic increases in burn-inproduction test throughput by enabling manyDUTs to be tested in parallel.Figure 5: Functional schematic of multi-channel burn-in system with HPA-272+9.2 Output Power MonitoringMini-Circuits’ PWR-4RMS true RMS powersensor and ZGDC35-93HP+ high-powerdirectional coupler allow a power monitoringcircuit to be added to the output of the HPA-272+ amplifier. The coupler’s 35 dBcoupling ratio and 250W input power ratingallow the power sensor to be used safely,even at fully saturated output power from theamplifier, providing a power measurement ofapproximately 0 to +50 dBm (1mW to100W).Figure 6: Functional schematic of an output power monitoring setup with HPA-272+9.3Output Power Monitoring with Gain ControlCombining Mini-Circuits RUDAT-6000-60 programmable attenuator with the50 dB dynamic range of the powersensor circuit presented in section 9.2creates a high power amplifier systemwith typical gain control range of -2 to+48 dB.Figure 7: Amplifier system with output power monitoring and gain control using HPA-272+ and RUDAT-6000-609.4 High Reliability Test CablesMini-Circuits’ CBL series of triple-shielded, high-reliability test cables are ideal for lab and production test requirements requiring superior quality and high performance from DC to 18 GHz. We have a wideselection of models in stock from 1.64 to 50 feet with SMA and N-Type connectors. Custom assemblies are also available on request.9.5 HandFlex ® Interconnect CablesMini-Circuits 141-series of HandFlex interconnect cables are ideal for fixed interconnections between components in test systems from DC to 18 GHz. Available from stock in a wide variety of lengths and many combinations of SMA, SMA right-angle, SMA bulkhead, and N-typeconnectors, they provide a low cost replacement to semi-rigid cables which often require special bending tools. With a minimum bend radios of just 8mm, 141-series HandFlex interconnect cables are ideal for enabling repeatable measurements in tight system layouts.RETURN MATERIAL AUTHORIZATION (RMA) If you have received this unit by mistake or wish to return it for evaluation, please contact Test Solutions support using the information on page 4. You may also contact our Sales Department at +1 718 934-4500 / ********************** or your local Mini-Circuits sales representative. They will discuss your RMA request, and per Mini-Circuits RMA policy, issue an identification number to ensure proper handling. All returns must be accompanied by appropriate Mini-Circuits identification and documentation to ensure proper handling.IMPORTANT NOTICE© 2015 Mini-CircuitsThis document is provided as an accommodation to Mini-Circuits customers in connection with Mini-Circuits parts only. In that regard, this document is for informational and guideline purposes only. Mini-Circuits assumes no responsibility for errors or omissions in this document or for any information contained herein.Mini-Circuits may change this document or the Mini-Circuits parts referenced herein (collectively, the “Materials”) from time to time, without notice. Mini-Circuits makes no commitment to update or correct any of the Materials, and Mini-Circuits shall have no responsibility whatsoever on account of any updates or corrections to the Materials or Mini-Circuits’ failure to do so.Mini-Circuits customers are solely responsible for the products, systems, and applications in which Mini-Circuits parts are incorporated or used. In that regard, customers are responsible for consulting with their own engineers and other appropriate professionals who are familiar with the specific products and systems into which Mini-Circuits’ parts are to be incorporated or used so that the proper selection, installation/integration, use and safeguards are made. Accordingly,Mini-Circuits assumes no liability therefore.In addition, your use of this document and the information contained herein is subject to Mini-Circuits’ standard terms of use, which are available at Mini-Circuits’ website at /homepage/terms_of_use.html.Mini-Circuits and the Mini-Circuits logo are registered trademarks of Scientific Components Corporation d/b/a Mini-Circuits. All other third-party trademarks are the property of their respective owners. A reference to any third-party trademark does not constitute or imply any endorsement, affiliation, sponsorship, or recommendation: (i) by Mini-Circuits of such third-party’s products, services, processes, or other information; or (ii) by any such third-party of Mini-Circuits or its products, services, processes, or other information.。
ABB程序功能块描述Functional Descr MOTFREQ01

We reserve all rights in this document and in the information contained therein. Reproduction, use or disclosure to third parties without express authority is strictly forbidden. ABBFUNCTIONAL DESCRIPTIONMOTFREQ011 Speed or Direction Variable Speed MotorFunctional Unit MOTFREQ01 Functional DescriptionContents1General (4)2Configuration (4)3Function Block MOTFREQ01 (5)4Function Description (8)4.1Basic Properties (8)4.2Motor Control Modes (8)4.2.1JOG (9)4.2.2LOCAL (9)4.2.3MANUAL (10)4.2.4EXTERNAL 1 and EXTERNAL 2 (10)4.2.5DISABLED (10)4.3Setpoint Modes (11)4.3.1LOCAL Setpoint (11)4.3.2MANUAL Setpoint (11)4.3.3EXTERNAL Setpoint (12)4.4Setpoint Speed (12)4.5Setpoint Tracking (12)4.6Ready for Start (12)4.7Ready (12)4.8Start-up (12)4.9Interlocks (13)4.10Motor Alarms (13)4.11Start and Stop (13)4.11.1Start and Stop Order at Different Motor Control Modes (14)4.11.2Start Order Selection (15)4.11.2.1Control mode JOG (15)4.11.2.2Control mode LOCAL (15)4.11.2.3Control mode MAN (15)4.11.2.4Control mode Ext1 or Ext2 (15)4.11.2.5Control mode DISABLE (15)4.12Fault Evaluation in the Control Circuit (15)4.13Supervision of Load Control (16)4.14Interaction Window (16)4.14.1MOTFREQ Interaction Window (16)4.14.2General Parameters (16)4.14.3Order & Order Event Block (17)4.14.4Indication Event Block (18)4.14.5Interlock Settings (19)4.14.6Current settings (20)4.14.7Texts (20)4.14.8Ranges & Settings (21)4.14.9Indications (21)5Operator Functions (22)5.1Presentation (22)5.1.1Display elements (22)5.1.1.1Object Display (23)5.1.1.2Process Display (23)5.1.2Time-logged Properties (24)5.2Faceplate (Dialog) (25)5.3Alarm and Event Handling (27)Functional Unit MOTFREQ01 Functional Description5.3.1General (27)5.3.2Alarm and Event Message (28)5.3.3Alarm and Event blocking (28)5.4Text Handling (29)Functional Unit MOTFREQ01 Functional Description1 GeneralMOTFREQ01 is a functional unit designed for the control of variable speed motors in different processes. It is based on the functionality of MOTCON and is designed primarily for use with AC frequency converters delivered by third-party vendors.The functional unit is standardised to a high degree to simplify the work of designing presentation, dialog and control logic. The unit has many optional capabilities, which increase its operational flexibility. MOTFREQ01 normally performs its control function without help from other elements.MOTFREQ01 is used in the control of variable speed motors from Operate ITOperator Station, control desks or control organs at the motor itself. The motor can be controlled from a master control function (e.g. group start, level regulation from level gauges etc).2 ConfigurationMOTFREQ01 like other functional units is built up of two parts: •A Function Block, which is handled in the same way as other Function Blocks in the ABB Controller 800M range of products. Figure 3.1 illustrates the terminals on the function block.•A section for operator functions, which consists of presentation and orderfunctions. Data and parameters from the process are presented on an Operate ITOperator Station. The keyboard of the Operate ITOperator Station is used by the operator to enter commands which control the operation of the functional unit. The response to the operator's intervention is shown on the display screen of theOperate ITOperator Station. The application work for this part is normally limited to the arrangement of the display. Figure 2.1 shows the structure of the functional unit.PROCESS OBJECTFigure 2-1. The Structure of the Functional UnitFunctional Unit MOTFREQ01 Functional Description3 Function Block MOTFREQ01The Function Block MOTFREQ01 implemented in the AC800M controller is illustratedbelow in figure 3-1. A more detailed description of each terminal is shown in table3-1.FUNCTION OF INPUT TERMINALS MOTFREQ01 FUNCTION OF OUTPUT TERMINALSName Name NoInt No Interlock IndicationDescription Description Trip Trip IndicationControl Program Enable Enable Blk Control not Enabled Indication Control Circuit Supervision ME RFS Ready For Start IndicationControl Voltage Signal M1 SO1Start OrderOverload Signal M2 Sack Acknowledgement Start OrderMCC Ready Signal M3 Run Running IndicationEmergency Stop M4 JogInd Jog IndicationShort Circuit M5 LocalInd Local IndicationSafety Interlock IC1 ManInd Manual mode IndicationSafety Interlock IC2 E1Ind E1 mode IndicationProcess Interlock IB1 E2Ind E2 mode IndicationProcess Interlock IB2 SP_Local Local SP IndicationProcess Interlock IB3 SP_Man Manual SP IndicationProcess Interlock IB4 SP_Ext External SP Indication Process Interlock for Group Start or Stop IA1 SP_OUT SP value indicationProcess Interlock for Group Start or Stop IA2 Ready Motor Ready in E1 or E2Start order pulse time T1Contactor time supervision T2Run interlock delay time T3Start order in E1 Mode E1StartStart order in E2 Mode E2StartE1 and E2 Stop StopMain Contactor Feedback Signal Ack1Motor Current MCAlarm Control Block AlcBlkJog Start Order JogStartJog start hold function JogFuncLocal Enable LEnblLocal Forward L1Local Stop LStopManual mode from logic SeqManE1 mode from logic SeqE1E2 mode from logic SeqE2Run Interlock 1 RunInt1Run Interlock 2 RunInt2Run Interlock 2 Function RunInt2FTrack A Enable (Auto to E1 Mode) Track_ATrack B Enable (Auto to Local Mode) Track_BMotor Temperature MotTempBearing Temperature BearTempSP Mode Local Enable Input from Logic MV_LenblSP Mode Man Enable Input from Logic SeqManSPSP Mode Ext. Enable Input from Logic SeqExtSPSpeed Indicator input MVSP Ramp Speed Speed1External SP ExtRefFigure 3-1. Function Block, Complete symbolFunctional Unit MOTFREQ01 Functional DescriptionTable 3-1 below illustrates the default properties of each terminal of MOTFREQ01function block.Index No. Terminal Data Type Attributes Direction Initial Value Description1 Name string coldretain in 'MotFreq' 'Name'2 Description string coldretain in 'Test Motfreq''Description'3 Enable bool coldretain in TRUE4 ME bool retain in 1 Control circuit alarm enable5 M1 bool retain in 1 Control voltage6 M2 bool retain in 1 Overload7 M3 bool retain in 1 Motor breaker8 M4 bool retain in 1 Emergency stop9 M5 bool retain in 1 Short Circuit 10 IC1 bool retain in 1 Safety Interlock 1 11 IC2 bool retain in 1 Safety Interlock 2 12 IB1 bool retain in 1 Process Interlock 1 13 IB2 bool retain in 1 Process Interlock 2 14 IB3 bool retain in 1 Process Interlock 3 15 IB4 bool retain in 1 Process Interlock 4 16 IA1 bool retain in 1 Sequence Interlock 1 17 IA2 bool retain in 1 Sequence Interlock 2 18 T1 time coldretain in 2s Start order pulse time 19 T2time coldretain in4s Contactor time supervision20 T3 time coldretainin 5s Run interlock delay time 21 E1Start bool in Start order in E1 mode 22 E2Start bool in Start order in E2 mode 23 Stop bool retain in 1 Stop order in E1 & E2 mode24Ack1bool retain in Main contactor acknowledge forward/high 25 MC real retain in Motor current 26 AlcBlk bool retain in 0 Alarm Control Block27 NoInt bool retain out Not interlocked 28 Trip bool retain out Tripped 29 Blk bool retain out Standby 30 RFS bool retain out Ready for start 31 SO1 bool retain out Start order 132 SAck bool retain out Start order acknowledgement 33 Run bool retain out 0 Run indication34 JogStart bool retain in Start order in Jog mode 35 JogFunc bool retain in 0 Jog start hold function 36 JogInd bool retain out Jog mode indication 37 LEnbl bool retain in 0 Local Enable from field 38 L1 bool retain in Start order in Local mode 39 LStop bool retain in 1 Local Stop order40 LocalInd bool retain out Local mode indication41 SeqMan bool in Order of Manual mode from logic 42 ManInd bool retain out Manual mode indication 43 SeqE1 bool in Order of E1 mode from logic 44 E1Ind bool retain out E1 mode indication45 SeqE2 bool in Order of E2 mode from logic 46E2IndboolretainoutE2 mode indication47 RunInt1 bool retain in 1 Run Interlock 1Functional Unit MOTFREQ01 Functional DescriptionIndex No. Terminal Data Type Attributes Direction Initial Value Description48 RunInt2 bool retain in 1 Run Interlock 2 49 RunInt2F bool retain in 0 Function for Run Interlock 250 Track_A bool retain in 1 Track A Enable - Bumpless from E1 to Auto 51Track_Bboolretainin1Track B Enable - Bumpless from Local to Auto52 MotTemp bool retain in 1 Motor Temperature 53 BearTemp bool retain in 1 Bearing Temp 54 MV_LEnbl bool retain in 0 SP Controlled from Local Panel 55 SeqManSP bool retain in 0 SP Mode Man from logic 56SeqExtSPboolretaininSP Mode External from Logic57 SP_Local bool retain out 0 Local SP indication 58 SP_Man bool retain out 0 Man SP indication 59 SP_Ext bool retain out 0 External SP indication 60 MV real retain in 0 Speed Indicator Input 61 Speed1 real retain in 2 SP Mode Ramp Speed 62 ExtRef real retain in 0 External SP Input 63 SP_OUTreal retain out 0 Control Signal Out64ReadyboolretainoutMotor Ready Indication in E1 or E2Table 3-1 Terminal PropertiesFunctional Unit MOTFREQ01 Functional DescriptionDescription4 FunctionProperties4.1 BasicThe MOTFREQ01 functional unit is designed for the control of variable speed motors, i.e.AC-Drives.MOTFREQ01 units consist of the following basic functions.• Supervision of control circuits• Evaluation of interlocks• Control of on/off• Supervision of motor current• Running of tests from the motor site• Control from the local operator's panel• Manual/External running• Supervision of operations via Operate IT Operator Station• Speed Setpoint Control4.2 Motor Control ModesMOTFREQ01 is intended for control from Operate IT Operator Station i.e. from a centralcontrol room. However, it is also possible to select other modes of control and thuscontrol MOTFREQ01 from other locations.All the control modes can be selected from the central operator station. The LOCALcontrol mode may also be selected from the local control station.The different modes of control are as follows:• Jog• Local• Manual• External 1• External 2By selecting control mode, the operator decides from which location the motor is to becontrolled. All control modes may be selected through dialog in Operate IT OperatorStation. The LOCAL control mode may also be selected from the local control stationthrough the Function Block input :LE, provided that the current control mode is neitherJOG, nor DISABLE.For the different control modes, MOTFREQ01 is controlled as follows. For a summary ofthe control modes, see Table 3-1.Functional Unit MOTFREQ01 Functional Description4.2.1 JOGT he control mode JOG is suitable for testing the motor in the field. The motor issupposed to be controlled from a stop/start station adjacent to the motor. Control from other locations is blocked.The supervision of interlocks is limited. Only the safety interlocks SafetyInt1 and SafetyInt 2 as well as faults in the control voltage chain (the inputs :M1 - :M5) prevent starting. The motor is started and stopped through the inputs :JogStart and :JogFunc.:JogStart, Start order from field-mounted start/stop station :JogFunc, Stop/Hold function from field-mounted start/stop stationThe function of these inputs is set out in tabular form below. :JogStart :JogFunc0 0 Stop order. 0 1 No change.1 0 Start and stop order in :JogStart input.1 1Start order on :JogStart and stop order on :JogFunc.When :JogFunc=1, the motor is stopped by breaking the control voltage chain, i.e. signified by any of the :M1 - :M5 inputs going low.4.2.2 LOCALT he motor is controlled from a local desk or panel. Control from other locations is blocked.LOCAL control mode, like other points of control, may be selected from Operate ITOperator Station. In addition, LOCAL control mode may be selected from the local control panel through the input :LEnbl as follows::LEnbl = 1: The control mode is LOCAL, as long as the Operate ITOperator Stationoperator does not request JOG or STAND BY. All other control modes are blocked and :LEnbl must be released before a mode change can occur.LEnbl -> 0: MOTFREQ01 resumes the either the previous or the latest control modecalled for from Operate ITOperator Station.Functional Unit MOTFREQ01 Functional DescriptionThe operator controls the motor through the inputs :Lstart and :LStop. :LStop Local stop order (active low) :Lstart Local start orderThe function of these inputs is set out in tabular form below. :Lstop :Lstart 0XStop order. Note In order for the motor to start when LStop has been low, LStop must be set high and LStart must make a low-to-high transition1 0 No change 1 1 Start order4.2.3 MANUALThe motor is controlled from Operate ITOperator Station. Control from other locations is blocked. This is the default control mode. To start, the operator has to press the key START. To stop the motor, the key STOP has to be pressed.4.2.4EXTERNAL 1 and EXTERNAL 2The motor is controlled from external signals, e.g. from a process signal. Control from other locations is blocked. This mode is e.g. used for on/off control of levels and for automatic start up and shutdown of belt conveyors etc.EXTERNAL 2 functions in exactly the same way as EXTERNAL 1. EXTERNAL 2 is used when the motor is to be controlled by Level 2 application software e.g. Auto Series Software.The function is enabled by inputs :SeqE1 and :SeqE2.The process controls the motor through the inputs :E1Start, :E2Start and :Stop. Theoperator is able to stop the motor by issuing stop order from Operate ITOperator Station. The control mode then changes to Manual, to prevent the motor from being restarted. :Stop Stop order (active low) :StartE1(2) Start orderThe function of these inputs is set out in tabular form below: :Stop :StartE1(2) 0 X Stop order 1 0 -> 1Start order:StartE1(2) are dynamic inputs, i.e. they trigger on the rising edge.4.2.5 DISABLEDThe motor is stopped and all orders to it are blocked. Used to take the motor Out of Service.4.3 SetpointModesAs for the Motor Control Modes above the speed setpoint can also be entered from a localcontrol station (the frequency converters control panel), or from the Operate IT OperatorStation or from a program in the AC800M.The different setpoint modes are as follows:• Local• Manual• ExternalBy selecting setpoint mode, the operator decides from which location the setpoint is to becontrolled. All setpoint modes may be selected through dialog in Operate IT OperatorStation.There is no correlation between motor control modes and setpoint modes i.e. when themotor is controlled using LOCAL this does not mean that the Setpoint changes mode toLOCAL too. If this functionality is required then the logic will need to be programmedexternally to the function block. All motor control modes are not affected by changes in theSetpoint modes.For the different setpoint modes, MOTFREQ01 is controlled as follows:Setpoint4.3.1 LOCALThe LOCAL setpoint mode may be selected from the local control station by using theFunction Block input :MV_Lenbl, or through the dialog in Operate IT Operator Station,provided function block is not disabled. All other setpoint modes are blocked and:MV_LEnbl must be released before a mode change can occur.The setpoint mode LOCAL is suitable entering a Setpoint from the frequency converter orfrom a local panel next to the motor. Setpoints from other modes are blocked. The outputterminal :SP_Local in the function block is set true indicating the mode is active.In LOCAL mode the output terminal :SP_OUT does not provide a setpoint to thefrequency converter because the frequency converter itself is providing this. The value ofthe Speed Indicator Input: MV is transferred to the output terminal: SP_OUT.4.3.2 MANUALSetpointThe MANUAL setpoint mode is selected by using the Function Block input: SeqManSP orthrough the dialog in Operate IT Operator Station, provided that function block is notdisabled.When in MANUAL setpoint mode it is possible to change the speed of the motor byentering the desired setpoint. Setpoints from other modes are blocked but it is stillpossible to change to these modes from the dialog in Operate IT Operator Station. Thedesired value is then available on the output: SP_OUT terminal. The output terminal:SP_Man in the function block is set true indicating the mode is active.4.3.3 EXTERNALSetpointThe EXTERNAL setpoint mode is selected by using the Function Block input: SeqExtSPor through the dialog in Operate IT Operator Station, provided that function block is notdisabled.The EXTERNAL mode enables a setpoint to be provided from an external signal e.g. froma PID controllers output. Setpoints from other modes are blocked but it is still possible tochange to these modes from the dialog in Operate IT Operator StationThe value at input terminal :EXTREF in the function block is then available at the outputterminal: SP_OUT. The output terminal: SP_Ext in the function block is set true indicatingthe mode is active.Speed4.4 SetpointTerminal :Speed1 is a coefficient used to restrict the ramp speed of the setpoint. Thevalue entered is the slope of the curve required. This value will depend on the range of thesetpoint. All setpoint changes are restricted by the ramp speed in all modes exceptingLocal setpoint mode. When changing to local mode from manual mode and external modethe local modes setpoint is indicated directly. In Local mode the setpoint is only displayedin MOTFREQ01, and setpoint speed has no affect.Setpoint Speed Coefficient = Setpoint Range / Ramp Time RequiredTracking4.5 SetpointThe setpoint tracking function is enabled by terminals :Track_A and :Track_B.Track_A is used to retain the external setpoint when changing mode from External toManual.Track_B is used to retain the local setpoint when changing mode from Local to Manual. 4.6 Ready for StartReady for start means that all the interlocks are satisfied, that there are no alarms andthat the control mode is not JOG or that the control is DISABLED.Ready for start is indicated by the MOTFREQ01 displays in the Operate IT OperatorStation and by the output terminal :RFS (Ready For Start) in the function block.4.7 ReadyThe output terminal: READY has the same functionality as the terminal: RFS but themotor has to be in External 1 or External 2 mode for the output to be set. This terminal isused in sequence applications to check the status of the motor i.e. when the motor is partof a sequence or group start.4.8 Start-upAn initialisation phase begins at start of the AC800M system.The result of this becomes:The outputs are reset (to zero) except for the ManInd terminal, which is set (to 1).Manual is the default control mode at system initialisation for both the motor and thesetpoint. With additional function block logic it is possible to force the control mode toother modes at system initialisation.4.9 InterlocksThe motor control can be interlocked by signals from the process and also by signals fromthe control logic. The interlocks are divided into four groups with the followingdesignations and functions.Safety Interlocks, which interlock the object for safety purposes. The two safetyinterlocks, :IC1 and :IC2, cannot be blocked.Process Interlocks. There are 4 normal process interlocks, :IB1 to :IB4. All four interlockscan be configured to accept blocking by the operator. All four interlocks can also beconfigured as start interlocks. A start interlock will prevent the motor from starting, but willnot stop a running motor.External (Sequence) Interlocks. Interlocks on terminals :IA1 and :IA2 are used if theobject is to be interlocked against other objects such as a pump motor or a group start orother conditions in an automatic sequence. These interlocks are configurable as blockedor not when not in E1 resp. E2 mode and the interlocks are not included in the conditionsfor indication of Ready for start.Run Interlocks. The inputs :RunInt1 and :RunInt2 are intended for connection tooperation monitors to obtain tripping or alarm in the event of faults. The inputs are to beTRUE when the equipment is faultless. In order to allow the motor to reach operationalspeed, RunInt1 and RunInt2 are blocked during the time :T3 after start-up. When theJOG control mode is selected, RunInt1 and RunInt2 are blocked. When RunInt1 orRunInt2 goes to 0, MOTFREQ01 remembers this error status until the alarm isacknowledged. Input :RunInt1 has a motor tripping function whereas the input :RunInt2function can be controlled with the parameter :RunInt2F. When input :RunInt2F = TRUE,the motor is tripped. With .RunInt2F = FALSE, only an alarm is given. Alarm handling of:RunInt1 and :RunInt2 is blocked internally in the Function Block with the motor atstandstill.An interlocking is active when the input is 0 (FALSE). All Process and External interlocksare blocked when the JOG control mode is selected.Alarms4.10 MotorInput terminals :MotTemp indicates that the motor has overheated. Terminal :BearTempindicates that the motor bearings have overheated. Both inputs terminals do not trip themotor but provide and alarm to the operator.4.11 Start and StopStart and stop commands for MOTFREQ01 may originate from dialog with Operate ITOperator Station or from Function Block inputs, depending on the control mode selected(See Section 4.2 Motor Control Modes, and Table 3.1).When a start command is issued to MOTFREQ01, it is forwarded to the motor through theFunction Block output :SO1 (Start order 1, Forwards/ High). See Section 4.11.2 StartOrder Selection. The start order on the output :SO1 is a pulse with a duration which isdetermined by the input :T1.The main contactor of the motor acknowledges the start order :SO1 by setting the input:ACK1 high. The main contactor must acknowledge within the time determined by theinput :T2. The time T2 ought to be set longer than T1.If the main contactor acknowledges the start order pulse :SO1 within the time T2,MOTFREQ01 sets the start order output :SO1 high and keeps it high. The time T3 afterthe main contactor having responded, MOTFREQ01 starts supervising the motor current.The time T3 is determined by the input :T3If the main contactor does not acknowledge the start order within the time T2, the startattempt is deemed abortive. Consequently, MOTFREQ01 issues an alarm about thecontactor failure and a new attempt at starting may be made.The contactor failure alarm indication on the object display of MOTFREQ01 disappearswhen the operator acknowledges the alarm.MOTFREQ01 also issues an alarm about main contactor failure when the contactoracknowledges start orders falsely, i.e. when it sets the inputs :ACK1 high without any startorder being issued. MOTFREQ01 transmits the alarm the time T2 after the input havingbeen set.4.11.1 Start and Stop Order at Different Motor Control ModesThe table below describes the commands which can be given at the different controlmodes of MOTFREQ01.Table 3-1. Relation between commands and control modesOrder Jog LocalManualExt1 Ext2Input JogStart StartStop - - - -InputLstart - Start- - -InputLstop - Stop- - -Operatorstart - - Start- -Operatorstop - -Stop Stop StopInputStartE1 - - - Start-InputStartE2 - - - -StartStop - - - StopStopSelectionOrder4.11.2 StartThe Function Block MOTFREQ01 has one start order output::SO1 Start order 1, Forwards/HighThe activation of the output is determined as follows from the different points of control.4.11.2.1 Control mode JOGFB input :JogStart4.11.2.2 Control mode LOCALFB input :LStart4.11.2.3 Control mode MANThe operator issues a Start order from Operate IT Operator Station.4.11.2.4 Control mode Ext1 or Ext2An superior control program sets the input :StartE1 or :StartE2 to issue a new start order.See the table below.:StartE1(2) Stop Descrchange.0 0 Nochange.1 0 Noorder1 1 Start4.11.2.5 Control mode DISABLEThe motor cannot be started.4.12 Fault Evaluation in the Control CircuitEvaluation is performed in the priority order M1 to M5. This means that if the Input :M1=0, the inputs :M2 - :M5 are not regarded etc. The signal ME interlocks the completeevaluation. ME=0 is used to prevent incorrect alarms with, for example, a total controlvoltage failure. The inputs M1 to M5 are to be TRUE when there are no errors. Theevaluation presupposes that the control circuit consists of a number of breaking contactsin series. Alarm handling of M1 to M5 is blocked internally in the Function Block with themotor at standstill.4.13 Supervision of Load ControlThe input MC is connected to the process signal for LOAD indication (Motor Current inMOTCON). This input on the function block is scalable and can be used to present themotor current or more aptly for frequency converters, the torque or power indication. Inthe function block the correct measurement range and engineering units can be entered.These will then be presented accordingly in the Faceplate and Object display in theOperate IT Operator Station.Info: Most modern AC Drives are have programmable outputs so that the correct signalcan be configured for power or torque and sent to the MC input.Window4.14 InteractionThe interaction window is available in the Control IT Control Builder. The interactionwindow is an engineering aid used to simplify configuration and blocking of signals notavailable on the faceplates. Changes to values in the Interaction window are onlyavailable in ‘Online’ mode in Control IT.WindowInteraction4.14.1 MOTFREQInteraction window overview. Name and description are shown. The buttons are links tosub-windows.Figure 4-1 Main Interaction Window.Parameters4.14.2 General“Class” defines the process section or area in which alarms are grouped. By utilizingclass the alarms can be filtered. Valid values are user defined. A suggestion would be touse mill area numbers as class values.“Severity defines the alarm priority for general alarms. The severity for MV-alarms isentered in window “Alarm & Event”. Valid values are 1 –1000 where 1000 is the highestpriority.Figure 4-2 General Parameters.4.14.3 Order & Order Event BlockBlocking of operator order and event handling of these are entered in this window.Figure 4-3 Order Block.4.14.4 Indication Event BlockEvent blocking of alarms and other indications are entered in this window.Figure 4-4 Indication Event Block.。
泰隆灯光IRIS应急灯自测E3生命值4220-240Flux210CCT4000高效率150lm W

IRIS EMERGENCY LIGHTInstallation Instructions Montageanleitung Montážní návodMonteringsvejledning Paigaldusjuhend AsennusohjeNotice de montage Szerelési útmutatóUputstvo za montažu Montagehandleiding Instructiuni de montaj EN DE CZ DK EE FI FR HU HR NL RO Istuzioni di montaggio Montavimo Instrukcijos Instalacijas instrukcija Monteringsanvisning Instrukcja montażu Installationsanvisning Инструкция по монтажуInstrukcija za instalaciju Montážny návod Navodilo za montažo 安装说明书IT LT LV NO PL SE RU SRB SK SLO CNIRIS EMERGENCY LIGHTSelf-testThe emergency kits carry out self-tests automatically to ensure its functionality.The self-test includes 3 types of tests:Initial test-As soon as mains supply is connected, the emergency kit will carry out a 5-seconds functional test automatically.In case of battery failure, LED indicator will turn flashing red; In case of LED light source failure, LED indicator will turn permanent red. Otherwise, the charge mode will start.Functional test- Refers to charging, discharging and the functioning of load.- Carry out for 10 seconds automatically every 30 calendar days.Duration test- Refers to the test of batteries capacity.- Carry out every 180 calendar days.Rest modeRest mode can be initiated during emergency mode by pressing test switch longer than 3 seconds.The rest mode will be exited automatically after reconnect AC mains.Test switch functionality-Press and hold the test switch by less than 5 seconds to perform an emergency function test, as long as the test switch is activated.-Press and hold the switch for more than 15 seconds, and it will return to the factory setting (the self-test time returns to the starting time).-Press and hold the test switch >10S in the fault status to eliminate the fault display.Please noteIf mains supply is off during self-test period, emergency conversion module would terminate self-test immediately and go into emergency mode.Self-test is under the regulation of EN62034.Yearly manual test will have no impact on battery life.。
英文测试说明文档
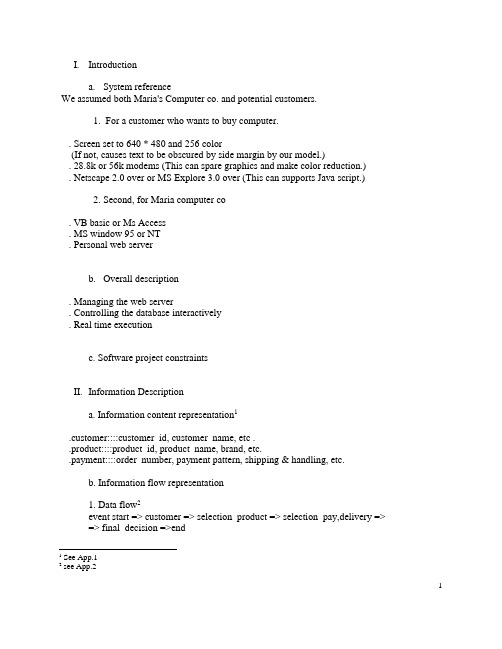
I.Introductiona.System referenceWe assumed both Maria's Computer co. and potential customers.1. For a customer who wants to buy computer.. Screen set to 640 * 480 and 256 color(If not, causes text to be obscured by side margin by our model.). 28.8k or 56k modems (This can spare graphics and make color reduction.). Netscape 2.0 over or MS Explore 3.0 over (This can supports Java script.)2. Second, for Maria computer co. VB basic or Ms Access. MS window 95 or NT. Personal web serverb.Overall description. Managing the web server. Controlling the database interactively. Real time executionc. Software project constraintsrmation Descriptiona. Information content representation1.customer::::customer_id, customer_name, etc ..product::::product_id, product_name, brand, etc..payment::::order_number, payment pattern, shipping & handling, etc.b. Information flow representation1. Data flow2event start => customer => selection_product => selection_pay,delivery =>=> final_decision =>end1 See App.12 see App.21III.Functional Descriptiona. Functional partitioningThis on-line shopping system is partitioned into three functions: processing user ID, selecting computer-related products, and choosing payment & shipping patterns.b. Functional description31. Restrictions / limitationSince time is very limited, the first product does not included a report, which can be handed in the supervisor, so that this on-line store can be operated more systematically. Those customers can not receive our shopping news monthly.Now the on-line order is limited in the North America since the mailing fees would be very high if we sell products to other countries. We will improve it in the future.This on-line store can only be useful for USD and Canadian Dollars.Since the order of mainframe is very limited, now we do not keep kinds of products in our product inventory.2. Processing narrativeIn “processing user ID” function, since this system is only available for some one who is in North America, this function can not process the address which is out of USA and Canada.In “selecting computer products” function, mainframe will not ava ilable and not every brand included.3. Design constraintsThe customer can only cancel the order before “selecting payment & shipping pattern” function. Once the customers input the credit card numbers or other payments pattern, they can not drop the order. We will provide verification before they input the payments pattern so that they will know the order can not be dropped. But if the customer is not satisfied with the products, we have the full-refund policy.Any customer who wants to order products, he or she must have user ID.3 See App.3234. Supporting diagramsc. Control Description 41. Control specification. When the products ordered by a customer is out-of-stock, display “ It is out-of-stock now”. When the customer inputs other country’s address, display “ It is only available within North America”.. When the customer cancel the order or do not want to enter this web page further, go back.2. Design constraintsCustomer will not be allowed to drop the order after he or she had selected payment and mailing patterns.IV. Behavioral DescriptionThere are 3 levels of State Diagram.a. State Diagram Level 15 We have 4 states such as Reading User Input, Select Computer Component, Check User ID and Choosing Payment Pattern. Each state has an external event that causes the system to change state. From Reading User Input State, there are two options that customer can select. First, when customer selects shopping button on screen, the shopping page (Select Computer Components page) will be activated. From Select Computer Components stage, if customer selects item that he wants to buy or exit the program, the stage “Choosing Payment Pattern” will be activated. After he selects payment pattern, the software will invoke input screen again for waiting customer input. The second option is to create customer profile in database. After creating customer profile, customer can select computer that he wants to buy or exit program.4See App.4 5See App.5b. State Diagram Level 2 61. For Selecting Computer ProductsWe have 3 states: Reading User Input, Selecting Computer Products & Brands and Calculating Expense. Each state has an external event that causes the system to change state.From Reading User Input, when customer wants to buy a product, the software will invoke the shopping page. After the customer selects product & brand that he wants to buy, the software will invoke calculation expense of the product.2.For Processing Customer ID & Display InvoiceWe have 4 states: Reading User Input, Check Customer ID, Creating Customer ID and Displaying Customer Information & Item Selected. Each state has an external event that causes the system to change state. From Reading User Input, when customer wants to buy something, he has to put customer ID. If he is not a member, the software will invoke Creating Customer ID page. If he is a member and he wants to display product that he chose in the past, the software will invoke Displaying Customer Information & Item Selected Page.3. For Selecting Payment & Shipping PatternWe have 3 states: Reading User Input, Select Payment & Shipping Pattern andcalculating total expense. Each state has an external event that causes the system to change state. Form Reading User Input, when customer selected products and brands already, he has to select payment and mail pattern to pay his products. After that, the software will invokeTotal Amount Page that customer can understand how much he has to pay for the product.c. State Diagram Level 371. For Display Customer IDWe have 4 states such as Reading User Input, Display Information, Update Information, and Customer checks order. Each state has an external event that causes the system to change state. From Reading User Input, when customer selects the product that he wants, before he submits the process, the confirmation page will show him to confirm the product that he selected. In this level, he can also select the button display ordered product that will show him about the list of product that he bought, total price and type of shipping.6 See App.67 See App.745V. validation and CriteriaOne of the requirements in this software is interactive web site: which means "ZERO MAINTENACE" in web site and company database both. The customer ID is produced indatabase automatically and obtained when the customer wants to get it. And when the customer summit, the data is updated automatically.T esting for Maria’s on -line computer storeCase testing: White box tests are done by Jin-Tak and NarumonPDL:1 Do until finish shopping2 Input product & brand3 If the quantity of product is null4 then display “out -of –store” go back 25 else update cart store6 calculate sum of prices7 if products are not correct8 then go back 29 else input payment & mail pattern 1011 12 13 14 15 16 17V(G)=6E-N+2=6P+1=6Basis set:Path 1: 1 2 3 5 6 7 9 10 15 16 17 18 19Path 2: 1 2 3 4 2 3 5 6 7 9 10 15 16 17 18 19Path 3: 1 2 3 5 6 7 8 2 3 5 6 7 9 10 15 16 17 18 19Path 4: 1 2 3 5 6 7 9 10 11 12 14 17 18 19Path 5: 1 2 3 5 6 7 9 10 11 12 13 19Black Box Testing:For function “Selecting Computer Product”Does it calculate the sum of prices correctly?Does the cart store show the correct information?For function “Selecting payment & shipping pattern”If the products are not what customers want, can they go back shopping?For function “Purchase items”Can we identify the customer-ID correctly?Can we build customer-ID correctly?Does the “ Display customer information and items” show the information correctly?67VI. Appendix1. A ER Diagram ER Diagrama. Dat object Type HierarchiesData Object Type Hierarchiesc. Data dictionary1.Social Security NumberName : SSN#Aliases : noneWhere used/ how used : Search informationDescription :SSN# = Access numberAccess number = *any nine number string*2.First NameName : first_nameAliases : noneWhere used/ how used : Search, add, delete and update customer databaseDescription :first_name = Access nameAccess name = *any name string*st NameName : last_nameAliases : noneWhere used/ how used : Search, add, delete and update customer databaseDescription :last_name = Access nameAccess name = *any name string*4.Middle NameName : mid_nameAliases : noneWhere used/ how used : Search, add, delete and update customer databaseDescription :mid_name = Access nameAccess name = *any name string*5.AddressName : address8Aliases : noneWhere used/ how used : Search, add, delete and update customer databaseDescription :address = address number + street nameaddress number = *any number string*street name = *any street name string*6.CityName : cityAliases : noneWhere used/ how used : Search, add, delete and update customer databaseDescription :city = *any city name string*7.ZipcodeName : zipcodeAliases : noneWhere used/ how used : Search, add, delete and update customer databaseDescription :zipcode = Access zipcode nameAccess zipcode name = *any five number string*8.Phone numberName : phone#Aliases : noneWhere used/ how used : Search, add, delete and update customer databaseDescription :phone# = long distance numberlong distance number = (1) + area code + local numberlocal number = prefix number + access numberprefix number = [795|799|874|877…]access number = *any four number string*9.Customer IdName : number[5]Aliases : noneWhere used/ how used : Search, add, delete and update customer databaseDescription :Input = [#####]10.Product IdName : Character [2] + number[5]Aliases : none9Where used/ how used : Search, add, delete and update Product databaseDescription :Character = a two initial brand nameNumber = unique number11.Product nameName : character[10]Aliases : noneWhere used/ how used : Search, add, delete and update product databaseDescription :Name = unique name12.PriceName : number[5]Aliases : noneWhere used/ how used : Search, add, delete and update product databaseDescription :Number = #####.##13.Order idName : number[5]Aliases : noneWhere used/ how used : Search, add, delete and update orders databaseDescription :When customer buy goods, order id is numbered automatically14.Payment patternName : character[10]Aliases : noneWhere used/ how used : Search, add, delete and update orders databaseDescription :Customer should decide what card be used when he buy.102. Data Flow DiagramData Flow Diagram Level 111DFD Level2 for "Selecting Computer Product"12DFD Level2 for "Processing Customer ID"13DFD Level2 for "Selecting Payment & Mail Pattern"1415Data Flow Diagram Level 3 for "Display Information & Item Selected"Select DisplayOrder3. 4. Control Flow Diagram Level 1Control Flow Diagram Level 1165. 6. 7. State DiagramState Diagram Level 1CancelInvoke Interact Screen17State Diagram Level 2 for "Selecting Computer Products"Products & BrandsInvoke Total Expense PageState Didagram Level 2 for "Selecting Payment & Mail Pattern"Products, Payment & MailInvoke Total Amount Page18State Diagram Level 2 for "Check Customer ID & Display Invoice"19State Didagram Level 3 for "Display Customer ID"Finish or Reject20。
1734AENTR指使灯说明
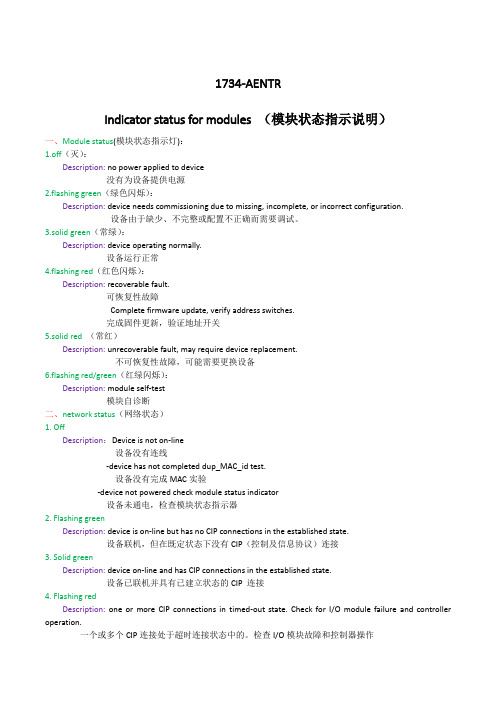
1734-AENTRIndicator status for modules (模块状态指示说明)一、Module status(模块状态指示灯):1.off(灭):Description: no power applied to device没有为设备提供电源2.flashing green(绿色闪烁):Description: device needs commissioning due to missing, incomplete, or incorrect configuration.设备由于缺少、不完整或配置不正确而需要调试。
3.solid green(常绿):Description: device operating normally.设备运行正常4.flashing red(红色闪烁):Description: recoverable fault.可恢复性故障Complete firmware update, verify address switches.完成固件更新,验证地址开关5.solid red (常红)Description: unrecoverable fault, may require device replacement.不可恢复性故障,可能需要更换设备6.flashing red/green(红绿闪烁):Description: module self-test模块自诊断二、network status(网络状态)1. OffDescription:Device is not on-line设备没有连线-device has not completed dup_MAC_id test.设备没有完成MAC实验-device not powered check module status indicator设备未通电,检查模块状态指示器2. Flashing greenDescription: device is on-line but has no CIP connections in the established state.设备联机,但在既定状态下没有CIP(控制及信息协议)连接3. Solid greenDescription: device on-line and has CIP connections in the established state.设备已联机并具有已建立状态的CIP 连接4. Flashing redDescription:one or more CIP connections in timed-out state. Check for I/O module failure and controller operation.一个或多个CIP连接处于超时连接状态中的。
QN8007B_Datasheet_rev2.09_111909

Rev 2.09 (11/right ©2009 by Quintic Corporation
Confidential Information contained herein is covered under Non-Disclosure Agreement (NDA).
_____________________________ Key Features _____________________________
Worldwide FM Band Transmit • 76 MHz to 108 MHz full band tuning in 50/100/200 kHz step sizes • 50/75s pre-emphasis High Performance FM Transmitter (FMT) • 66dB Stereo SNR, 0.03% THD • Maximum 121dBµV RF output level with 42dB adjustable range • Integrated Clear Channel Scan RDS/RBDS Transmit • Supports US and European data service, including TMC (Traffic Messaging Channel) (not available in QN8007L) Flexible Audio Interfaces • Digital audio interface supports I2S and a variety of PCM data formats with 4 different data rates • Programmable analog audio input/output • Integrated audio AGC and soft clipping Very Low Power Consumption • 9.2 mA • Integrated voltage regulator, direct connect to battery • Power saving idle and standby modes • Low shutdown leakage current Ease of Integration • Small footprint, 4 x 4 x 0.85mm QFN24 • Only 2 external passive components required • Adaptive antenna tuning • Low cellular and GPS band spurs • High Immunity to TDMA (GSM/GPRS) burst noise • Multiple crystal frequencies supported • 2-wire and 3-wire control interfaces Robust Operation • -250C to +850C operation • ESD protection on all input and output pads
ADXL345快速入门AN-1077_cn

AN-1077应用笔记One Technology Way • P .O. Box 9106 • Norwood, MA 02062-9106, U.S.A. • Tel: 781.329.4700 • Fax: 781.461.3113 • ADXL345快速入门指南作者:Tomoaki TusuzkiA X09119-001X OUT = +1gY OUT = 0g Z OUT = 0gOUT Y OUT = 0g Z OUT = 0gX OUT = 0g Y OUT = –1g Z OUT = 0gY OUT = 0g Z OUT = +1gX OUT = 0g Y OUT = 0g Z OUT = –1g09119-002物理安装ADXL345是三轴加速度计。
检测轴如图1所示。
当ADXL345沿检测轴正向加速时,它对正加速度进行检测。
在检测重力时用户需要注意,当检测轴的方向与重力的方向相反时检测到的是正加速度。
图2所示为输出对重力的响应。
ADXL345采用3 mm × 5 mm × 1 mm 、14引脚小型超薄塑料封装。
推荐的印制电路板焊盘图形请参考ADXL345数据手册。
图2. 输出响应与重力方向的关系图1. ADXL345的检测轴AN-1077 目录物理安装 (1)电气连接 (3)通信接口 (3)初始化.......................................................................................3读取输出数据 (4)数据格式 (4)使用自测功能 (5)使用偏移寄存器 (6)AN-1077表1. SPI 设置处理器设置 描述主机ADXL345作为从机工作 SPI 模式时钟极性 (CPOL) = 1时钟极性 (CPHA) = 1位序MSB 优先模式09119-005V V C S09119-00309119-004图4. 推荐的I 2C 模式的连接图3. 推荐的4线式SPI 模式的连接图5. 最小初始化序列电气连接ADXL345通过I 2C 或SPI (3线式或4线式模式)进行通信。
国家开放大学《商务英语4》Unit 3 Self-test试题及答案
选择填空题(每题10分,共5题)—Hello, this is Lucas Bowen. I'd like to order some machines.—___________. When do you need them?选择一项:A. Sorry, I am busyB. No problemC. No, you can do it online反馈你的回答正确解析:本题考核“打电话”的交际用语。
第一说话人打电话提出订货的请求,接听者第二句询问订货的时间说明,接听者已给对方可以继续商务活动的明确答复,所以答案是B。
正确答案是:No problem—Okay then, so to confirm: a 6% discount but you pay all the shipping and installation costs.—____________. I'll call you tomorrow.选择一项:A. Sorry, it's not clearB. That sounds all rightC. Sorry, we didn't discuss about that反馈你的回答正确解析:本题考核对商务谈判结果“确认和认可”的交际用语。
当第一说话人陈述谈判结果时,听者应该对双方谈判的结果进行确认和表示认可,所以答案是B。
正确答案是:That sounds all rightIn business,whatever you do, do not ____ illegal benefit.选择一项:A. chaseB. chooseC. challenge反馈你的回答正确译文:做生意,无论如何都不能追逐非法利润。
解析:chase意为“追逐”;choose意为“选择”;challenge意为“挑战”;本句宾语是非法利润,选择chase符合句意;所以答案是A。
Software Specification
Table of Contents1.SCOPE OF THIS DOCUMENT (3)2.SOFTWARE SAFETY REQUIREMENTS (3)2.1.S AFETY-R ELATED F UNCTIONS TO BE I MPLEMENTED (4)2.1.1Functions Related to the Application (4)2.1.2Functions Related to Software or Hardware Faults (4)2.1.3Control Response(s) in Case of Detected Fault/Error (7)2.2.I NTERFACES B ETWEEN S OFTWARE AND H ARDWARE (7)2.3.I NTERFACES B ETWEEN S AFETY AND N ON-S AFETY R ELATED F UNCTIONS (8)3.SOFTWARE ARCHITECTURE (8)3.1.T ECHNIQUES AND M EASURES TO C ONTROL S OFTWARE F AULTS/E RRORS (8)3.2.I NTERACTIONS B ETWEEN H ARDWARE AND S OFTWARE (8)3.3.P ARTITIONING I NTO M ODULES AND A LLOCATION TO S PECIFIED S AFETY F UNCTIONS (8)3.4.H IERARCHY AND C ALL S TRUCTURE OF THE M ODULES (C ONTROL F LOW) (9)3.5.I NTERRUPT H ANDLING (9)3.6.D ATA F LOW AND R ESTRICTIONS ON D ATA A CCESS (9)3.7.A RCHITECTURE AND S TORAGE OF D ATA (9)3.8.T IME-BASED D EPENDENCIES OF S EQUENCES AND D ATA (9)4.MODULE DESIGN AND CODING (9)4.1.M ODULE:<MODULE NAME> (10)4.1.1Functions (10)4.1.2Interfaces to Other Modules (10)4.1.3Data (10)4.2.M ODULE:<MODULE NAME> (10)4.2.1Functions (10)4.2.2Interfaces to Other Modules (10)4.2.3Data (10)4.3.M ODULE:<MODULE NAME> (11)4.3.1Functions (11)4.3.2Interfaces to Other Modules (11)4.3.3Data (11)1. Scope of This DocumentThe scope of this document, per UL 60730-1 Clause H.11.12.3.2, is to specify the requirements, architecture, and module design and coding for the safety-related software in the subject product. The Software Specification serves as the left-hand side of the “V” in the V-Model as shown in UL 60730-1 Figure H.1 (reproduced below):UL 60730-1 Figure H.1***As specified in UL 60730-1, the V-Model is a recommended – not required – life cycle, and other methods can be used if they incorporate disciplined and structured processes including design and test phases.***2. Software Safety RequirementsThe requirements for the safety-related software in terms of the software safety functions are specified below. The requirements also include the Software Fault Analysis specified in H.7 Table 1, Requirement 68, including identification of safety-related data and segments of the software sequence and measures provided to address faults/errors in Table H.1.The Software Safety Requirements (H.11.12.3.2.1) have the following relationships as defined in UL 60730-1 Figure H.1:•Input: System Safety Requirements Specification (outside the scope of this Standard)•Output/Verified Against: Software Architecture (H.11.12.3.2.2)•Validated By: Software Validation Testing (H.11.12.3.3.3)2.1. Safety-Related Functions to be Implemented2.1.1 Functions Related to the Application2.1.1.1.*** Each safety-related function related to the application should be describedhere in this list. Included in this description should be the required Software Class,any critical threshold(s) for determining correct performance of the function, andthe required response time(s). Verbiage used should be deterministic and testablein nature by using such terms as “shall”. For example: “The software shall detectand respond to an overload condition of the motor based on current consumption.If the current exceeds 10 A for a duration of 10 seconds, the software shallimmediately cease motor operation. This function shall comply with SoftwareClass B requirements.” ***2.1.1.2.2.1.1.3.2.1.2 Functions Related to Software or Hardware Faults***Based on the required Software Class, the appropriate version of Table H.1 should be included and filled out below, with reference to the provided measure(s) (see Table H.1 for examples of acceptable measures) and the corresponding requirement number(s) in the Software Safety Requirements Specification. The unused table can be deleted.******The required software class(es) [A, B, and/or C] and implemented software structures [single-channel with functional test, single-channel with periodic self-test, dual-channel without comparison, single-channel with periodic self-test and monitoring, dual-channel (homogeneous) with comparison, dual-channel (diverse) with comparison, or other] shall be defined/declared here per Table 1 requirements 69 and 70.******Use the following table for Software Class B******Use the following table for Software Class C******If any of the referenced requirements to address software or hardware faults do not match the definition of one of the examples of acceptable measures listed in Table H.1, additional rationale should be provided here to show that the measure(s) implemented fully address the defined fault/errors described in Table H.1.***2.1.3 Control Response(s) in Case of Detected Fault/Error***The software fault/error detection time(s) and control response(s) in case of detectedfault/error shall be declared here per UL 60730-1 Table 1, requirements 71 and 72.***2.2. Interfaces Between Software and Hardware2.2.1.*** Description(s) of interfaces between software and hardware should beincluded here in this list. This potentially includes, but is not limited to, theprogrammable component itself (e.g. microcontroller, DSP, etc.) and its internaland external peripherals such as clocks, memories, external communications,digital I/O, analog I/O including A/D converters, D/A converters, and analogmultiplexers, monitoring devices and comparators such as watchdog timers,voltage regulating devices, etc., custom ICs such as FPGAs, ASICs, etc., userinterfaces, sensors such as temperature or current-sensing devices, and actuatorssuch as relays and transistors used to perform the safety-related functions.***2.2.2.2.2.3.2.3. Interfaces Between Safety and Non-Safety Related Functions2.3.1.*** Identification of and description(s) of interfaces between safety and non-safety related functions should be included here in this list. This potentiallyincludes, but is not limited to, a description of the partitioning concepts used inthe software, e.g. separation of functions into logical and/or physical segments,the information exchanged and shared between functions, and any measures thathave been put into place to ensure, per Table 1, footnote 12, that the non-safetyrelated segments do not influence the safety-related segments.***2.3.2.2.3.3.3. Software ArchitectureThe software architecture is specified below.The Software Architecture (H.11.12.3.2.2) has the following relationships as defined in UL 60730-1 Figure H.1:•Input: System Architecture Specification (outside the scope of this Standard)•Input/Verified Against: Software Safety Requirements (H.11.12.3.2.1)•Output/Verified Against: Module Design and Coding (H.11.12.3.2.3)•Tested By: Software Integration Testing (H.11.12.3.3.2)3.1. Techniques and Measures to Control Software Faults/Errors***A description at a high level – for example, block diagram, flow chart, etc. should be provided here. Some of these sections can be combined as long as all sections have been addressed one way or another.***3.2. Interactions Between Hardware and Software***A description at a high level – for example, block diagram, flow chart, etc. should be provided here. Some of these sections can be combined as long as all sections have been addressed one way or another.***3.3. Partitioning Into Modules and Allocation to Specified Safety Functions***A description at a high level – for example, block diagram, flow chart, etc. should be provided here. Some of these sections can be combined as long as all sections have been addressed one way or another.***3.4. Hierarchy and Call Structure of the Modules (Control Flow)***A description at a high level – for example, block diagram, flow chart, etc. should be provided here. Some of these sections can be combined as long as all sections have been addressed one way or another.***3.5. Interrupt Handling***A description at a high level – for example, block diagram, flow chart, etc. should be provided here. Some of these sections can be combined as long as all sections have been addressed one way or another.***3.6. Data Flow and Restrictions on Data Access***A description at a high level – for example, block diagram, flow chart, etc. should be provided here. Some of these sections can be combined as long as all sections have been addressed one way or another.***3.7. Architecture and Storage of Data***A description at a high level – for example, block diagram, flow chart, etc. should be provided here. Some of these sections can be combined as long as all sections have been addressed one way or another.***3.8. Time-based Dependencies of Sequences and Data***A description at a high level – for example, block diagram, flow chart, etc. should be provided here. Some of these sections can be combined as long as all sections have been addressed one way or another.***4. Module Design and CodingThe module design and coding of the software is specified below. It also includes the Software Sequence Documentation (Clause H.7, Table 1, requirement 66) and Programme Documentation (Clause H.7, Table 1, requirement 67).The Module Design and Coding (H.11.12.3.2.3) have the following relationships as defined in UL 60730-1 Figure H.1:•Input/Verified Against: Software Architecture (H.11.12.3.2.2)•Output/Verified Against: Source Code Implementation•Tested By: Module Design Testing (H.11.12.3.3.1)4.1. Module: <MODULE NAME>4.1.1 Functions***A detailed description of each function in this module, including its purpose, its inputs, and its outputs should be provided here in this section.***4.1.2 Interfaces to Other Modules***A detaile d description of the module’s public interface with other modules should be provided here in this section.***4.1.3 Data***A detailed description of the module’s publicly-available and private data should be provided here in this section.***4.2. Module: <MODULE NAME>4.2.1 Functions***A detailed description of each function in this module, including its purpose, its inputs, and its outputs should be provided here in this section.***4.2.2 Interfaces to Other Modules***A detailed description of th e module’s public interface with other modules should be provided here in this section.***4.2.3 DataPage 11 of 11 ***A detailed description of the module’s publicly-available and private data should be provided here in this section.***4.3. Module: <MODULE NAME>4.3.1 Functions***A detailed description of each function in this module, including its purpose, its inputs, and its outputs should be provided here in this section.***4.3.2 Interfaces to Other Modules***A detailed description of the module’s public i nterface with other modules should be provided here in this section.***4.3.3 Data***A detailed description of the module’s publicly-available and private data should be provided here in this section.******These sections should be repeated until all modules in the software have been described***<PRODUCT NAME>Software SpecificationDOC. NO. XXXXX, REV. XX。
Nokia_Care_Suite使用教程 带你了解更多未知功能
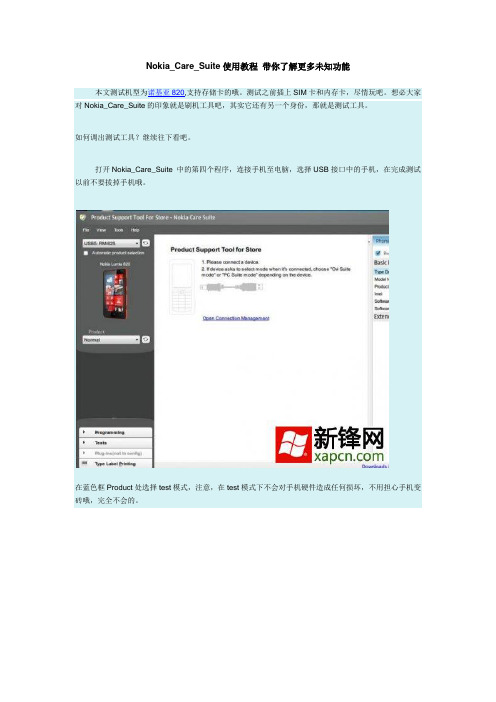
Nokia_Care_Suite使用教程带你了解更多未知功能本文测试机型为诺基亚820,支持存储卡的哦。
测试之前插上SIM卡和内存卡,尽情玩吧。
想必大家对Nokia_Care_Suite的印象就是刷机工具吧,其实它还有另一个身份,那就是测试工具。
如何调出测试工具?继续往下看吧。
打开Nokia_Care_Suite 中的第四个程序,连接手机至电脑,选择USB接口中的手机,在完成测试以前不要拔掉手机哦。
在蓝色框Product处选择test模式,注意,在test模式下不会对手机硬件造成任何损坏,不用担心手机变砖哦,完全不会的。
此时手机会关机,启动进入test模式,电脑端如下界面:进入test模式后,手机界面如下:好了,test模块中一共有11个测试项目,分别为1、self test(自检测试)2、Touch Display Test(触摸显示器测试)3、Display Test(显示测试)4、Vibra Test(振动器测试)5、SIM Test(SIM卡读取测试)6、Keyboard Test(键盘测试)7、Memory Card Test(存储卡测试)8、Micophones (麦克风测试)9、Accelerometer Test(重力感应器测试、加速度计测试)10、Audio Output Test(音频输出测试)11、Light Test(发光元件测试)如下图:下面简单介绍各个模块。
1、self test(自检测试)自动检测NFC、WLAN等共24个功能正常与否。
根据自己需要选择部分项目或者全部选择进行测试,测试时手机为黑屏状态,正常,大家不用担心。
我的全部测试后,96这一个没有,相信大家都没有。
每个选中每个测试编号,下面都有详细说明,提示测试的功能描述等。
Test name:Accessory detection self testTest description:Test verifies the MPHC_IN pin and audio codecs interrupt line connectivity.Result:MINORResult (detailed view):FTM Audio device failed255Data description:Raw error code provided by driver.Method description:Selftest requests special FTM audio miniport driver to test the lines.大概意思为:试验名称:附件检测自测试测试描述:试验验证了mphc_in引脚和音频编解码器中断线连接。
Bixolon SRP-350 352III 产品安装指南说明书
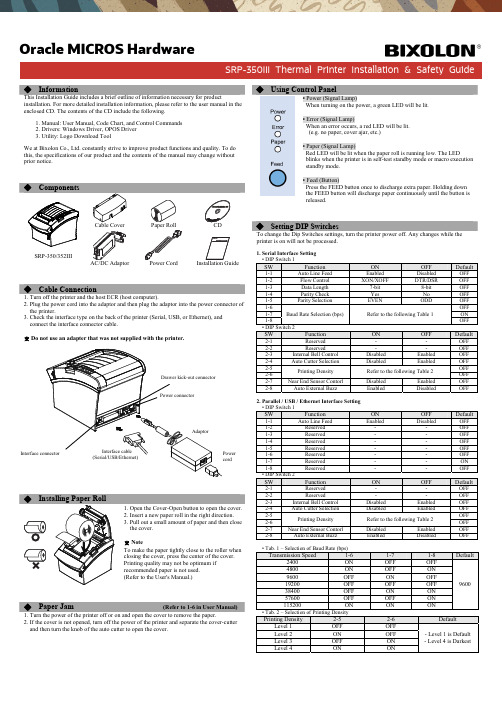
◈InformationThis Installation Guide includes a brief outline of information necessary for productinstallation. For more detailed installation information, please refer to the user manual in the enclosed CD. The contents of the CD include the following.1. Manual: User Manual, Code Chart, and Control Commands2. Drivers: Windows Driver, OPOS Driver3. Utility: Logo Download ToolWe at Bixolon Co., Ltd. constantly strive to improve product functions and quality. To do this, the specifications of our product and the contents of the manual may change without prior notice.◈Cable Connection1. Turn off the printer and the host ECR (host computer).2. Plug the power cord into the adaptor and then plug the adaptor into the power connector of the printer.3. Check the interface type on the back of the printer (Serial, USB , or Ethernet), and connect the interface connector cable. ※Do not use an adapter that was not supplied with the printer.◈Paper Jam(Refer to 1-6 in User Manual)1. Turn the power of the printer off or on and open the cover to remove the paper.2. If the cover is not opened, turn off the power of the printer and separate the cover-cutter and then turn the knob of the auto cutter to open the cover.◈Using Control Panel• Power (Signal Lamp)When turning on the power, a green LED will be lit. • Error (Signal Lamp)When an error occurs, a red LED will be lit.(e.g. no paper, cover ajar, etc.)• Paper (Signal Lamp)Red LED will be lit when the paper roll is running low. The LEDblinks when the printer is in self-test standby mode or macro execution standby mode.• Feed (Button)Press the FEED button once to discharge extra paper. Holding down the FEED button will discharge paper continuously until the button is released.◈Setting DIP SwitchesTo change the Dip Switches settings, turn the printer power off. Any changes while the printer is on will not be processed.1. Serial Interface Setting • DIP Switch 1SW Function ONOFF Default1-1Auto Line Feed Enabled Disabled OFF 1-2Flow Control XON/XOFFDTR/DSR OFF 1-3Data Length 7-bit 8-bit OFF 1-4Parity Check Yes No OFF 1-5Parity Selection EVENODD OFF1-6Baud Rate Selection (bps)Refer to the following Table 1OFF 1-7ON 1-8OFF• DIP Switch 2SW Function ONOFF Default2-1Reserved -- OFF 2-2Reserved -- OFF 2-3 Internal Bell Control Disabled Enabled OFF2-4 Auto Cutter Selection DisabledEnabled OFF2-5Printing DensityRefer to the following Table 2OFF2-6OFF2-7Near End Sensor Contorl Disabled Enabled OFF 2-8Auto External Buzz Enabled Disabled OFF2. Parallel / USB / Ethernet Interface Setting • DIP Switch 1SWFunction ONOFF Default1-1Auto Line Feed Enabled Disabled OFF1-2Reserved -- OFF 1-3Reserved -- OFF 1-4Reserved -- OFF 1-5Reserved -- OFF 1-6Reserved -- OFF 1-7Reserved -- ON 1-8Reserved -- OFF• DIP Switch 2SW Function ONOFF Default2-1Reserved -- OFF2-2Reserved -- OFF 2-3 Internal Bell Control Disabled Enabled OFF2-4 Auto Cutter Selection DisabledEnabled OFF2-5Printing DensityRefer to the following Table 2OFF2-6OFF2-7Near End Sensor Contorl Disabled Enabled OFF 2-8Auto External Buzz Enabled Disabled OFF• Tab. 1 – Selection of Baud Rate (bps)Transmission Speed1-61-71-8Default 2400ON OFF OFF 9600 4800ON OFF ON 9600OFF ON OFF19200OFF OFF OFF38400OFF ON ON 57600OFF OFF ON 115200ON ON ON • Tab. 2 – Selection of Printing DensityPrinting Density2-5 2-6 Default Level 1 OFF OFF - Level 1 is Default - Level 4 is DarkestLevel 2 ON OFF Level 3 OFF ON Level 4ONONSRP-350III Thermal Printer Installation & Safety GuidePower cordInterface cable (Serial/USB/Ethernet)AdaptorDrawer kick-out connector Power connectorInterface connectorOracle MICROS Hardware◈Self-Test1. Check that the paper is properly loaded.2. While pressing the Feed button, turn the power off. Self-test begins.3. Print the current state of the printer such as ROM version and DIP switch setting.4. Print the current state of the printer and stop printing after the following phrase. (The paper signal lamp continues to flicker):SELF-TEST PRINTING.PLEASE PRESS THE FEED BUTTON.5. Press the Feed button to continue printing. Print the printable character forms.6. End the self-test mode automatically and print the phrase below to cut the paper.*** COMPLETED ***7. When the self-test mode of the printer ends, the printer turns to the normal state. ※ NoteIt is possible to check whether the printer works properly through the self-test, with which printing quality, ROM version and DIP settings can be confirmed.◈WEEE (WasteElectrical and Electric Equipment)This marking shown on the product or its literature, indicates that is should not bedisposed of with other household wastes at the end of its working life. To prevent possible harm to the environment or human health from uncontrolled wastedisposal, please separate this from other types of wastes and recycle it responsibly to promote the sustainable reuse of material resources. Household users should contact either the retailer where they purchased this product, or their local government office, for details of where and how they can take this item for environmentally safe recycling.Business users should contact their supplier and check the terms and conditions of the purchase contract. This product should not be mixed with other commercial wastes for disposal.☎BIXOLON Co., Ltd.● Website ● Korea Headquarters(Add) 7~8F, (Sampyeong-dong), 20, Pangyoyeok-ro241beon-gil,Bundang-gu, Seongnam-si, Gyeonggi-do, 13494, Korea (ROK) (Tel.) +82-31-218-5500 ● U.S. Office(Add) BIXOLON America Inc., 3171 Fujita St, Torrance, CA 90505 (Tel.) +1-858 764 4580 ● Europe Office(Add) BIXOLON Europe GmbH, Tiefenbroicher Weg 35 40472 Düsseldorf (Tel.) +49 (0)211 68 78 54 0◈Safety PrecautionsIn using the present appliance, please keep the following safety regulations in order to prevent any hazard or material damage.WARNINGViolating following instructions can cause serious injury or death.CAUTIONViolating following instructions can cause slight wound or damage the appliance.Do not use the printer when it is out of order. This can cause a fire or an • Switch off and unplug the printer before calling your dealer.Do not let water or other foreign objects in the printer.• If this happened, switch off and unplug the printer before calling your dealer.Use only approved accessories and do not try to disassemble, repair or remodel it for yourself.• Call your dealer when you need these services. • Do not touch the blade of auto cutter.Install the printer on the stable surface.• If the printer falls down, it can be broken and you can hurt yourself.Keep the desiccant out of children’s If you observe a strange smoke, odor or noise from the printer, unplug it before taking following measures.• Switch off the printer and unplug the set from the • After the disappearance of the smoke, call your dealer to repair it. Do not bend the cable by force or leave it under any heavy object.• A damaged cable can cause a fire.Do not plug in or unplug with your hands wet.• You can be electrocuted.Keep the plastic bag out of children’s reach.• If not, a child may put the bag on his head.Do not plug several products in one multi-outlet.• This can provoke over-heating and a fire.• If the plug is wet or dirty, dry or wipe it before usage.• If the plug does not fit perfectly with the outlet,do not plug in.• Be sure to use only standardized multi-outlets.PROHIBITEDPROHIBITED PROHIBITEDONLY SUPPLIED ADAPTERTO UNPLUGPROHIBITEDDISASSEMBLING PROHIBITEDPROHIBITEDPROHIBITEDTO UNPLUGPRINTERPRINTERPRINTERPRINTER DEALERPRINTERPROHIBITEDPROHIBITED PROHIBITEDT o set the IP address when using the Ethernet interface, you must use the Bixolon Net Configuration Tool . You can download the Bixolon Net Configuration Tool and accompanying documentation from the following locations:SRP-350/352III Downloads : https:///download_view.php?idx=24User Guide: https:///_upload/manual/Manual_SRP-350352III_user_english_Rev_1_05.pdf◈Configuring the IP Address● Website https:///industries/micros/● Customer Support https://When contacting Customer Support, please provide the following:•Product version and program/module name•Functional and technical description of the problem (include business impact)•Detailed step-by-step instructions to recreate •Exact error message received •Screenshots of each step you takeOracle MICROSOracle MICROS Hardware | Bixolon SRP-350 Thermal Printer Installation & Safety Guide, Release 1.0Oracle Legal NoticesCopyright NoticeCopyright © 2022 Oracle and/or its affiliates.License Restrictions Warranty/Consequential Damages DisclaimerThis software and related documentation are provided under a license agreement containing restrictions on use and disclosure and are protected by intellectual property laws. Except as expressly permitted in your license agreement or allowed by law, you may not use, copy, reproduce, translate, broadcast, modify, license, transmit, distribute, exhibit, perform, publish, or display any part, in any form, or by any means. Reverse engineering, disassembly, or decompilation of this software, unless required by law for interoperability, is prohibited.Warranty DisclaimerThe information contained herein is subject to change without notice and is not warranted to be error-free. If you find any errors, please report them to us in writing.Restricted Rights NoticeIf this is software or related documentation that is delivered to the U.S. Government or anyone licensing it on behalf of the U.S. Government, then the following notice is applicable:U.S. GOVERNMENT END USERS: Oracle programs (including any operating system, integrated software, any programs embedded, installed or activated on delivered hardware, and modifications of such programs) and Oracle computer documentation or other Oracle dat a delivered to or accessed by U.S. Government end users are "commercial computer software" or "commercial computer software documentation" pursuant to the applicable Federal Acquisition Regulation and agency-specific supplemental regulations. As such, the use, reproduction, duplication, release, display, disclosure, modification, preparation of derivative works, an d/or adaptation of i) Oracle programs (including any operating system, integrated software, any programs embedded, installed or activated on delivered har dware, and modifications of such programs), ii) Oracle computer documentation and/or iii) other Oracle data, is subject to the rights and limitations specified in the license contained in the applicable contract. The terms governing the U.S. Government's use of Oracle cloud services are defined by the applicable contract for such services. No other rights are granted to the U.S. Government.Hazardous Applications NoticeThis software or hardware is developed for general use in a variety of information management applications. It is not developed or intended for use in any inherently dangerous applications, including applications that may create a risk of personal injury. If you use this software or hardware in dangerous applications, then you shall be responsible to take all appropriate fail-safe, backup, redundancy, and other measures to ensure its safe use. Oracle Corporation and its affiliates disclaim any liability for any damages caused by use of this software or hardware in dangerous applications.Trademark NoticeOracle, Java, and MySQL are registered trademarks of Oracle and/or its affiliates. Other names may be trademarks of their respective owners.Intel and Intel Inside are trademarks or registered trademarks of Intel Corporation. All SPARC trademarks are used under license and are trademarks or registered trademarks of SPARC International, Inc. AMD, Epyc, and the AMD logo are trademarks or registered trademarks of Advanced Micro Devices. UNIX is a registered trademark of The Open Group.Third-Party Content, Products, and Services DisclaimerThis software or hardware and documentation may provide access to or information about content, products, and services from third parties. Oracle Corporation and its affiliates are not responsible for and expressly disclaim all warranties of any kind with respect to third-party content, products, and services unless otherwise set forth in an applicable agreement between you and Oracle. Oracle Corporation and its affiliates will not be responsible for any loss, costs, or damages incurred due to your access to or use of third-party content, products, or services, except as set forth in an applicable agreement between you and Oracle.Documentation AccessibilityFor information about Oracle's commitment to accessibility, visit the Oracle Accessibility Program websiteat /pls/topic/lookup?ctx=acc&id=docaccAccess to Oracle SupportOracle customers that have purchased support have access to electronic support through My Oracle Support. For information,visit /pls/topic/lookup?ctx=acc&id=info orvisit /pls/topic/lookup?ctx=acc&id=trs if you are hearing impaired.。
高等教育自学考试自考《英语二》试卷及答案指导(2025年)
2025年高等教育自学考试自考《英语二》复习试卷及答案指导一、阅读判断(共10分)第一题Read the following passage and answer the questions below.The concept of a “smart city” has been gaining traction in recent years.A smart city uses digital technology to enhance performance and well-being, to reduce costs and resource consumption, and to engage more effectively with its citizens. Key components of a smart city include smart traffic lights to reduce congestion, smart grids for better energy management, and smart buildings that optimize energy use.1.A smart city uses digital technology to enhance the quality of life forits residents.2.Smart cities aim to reduce costs and resource consumption.3.A smart city does not need to engage with its citizens effectively.4.Smart traffic lights are not a component of a smart city.5.Smart grids are only used for better energy management in smart cities.Answers:1.True2.True3.False4.False5.TrueSecond Question: Reading Judgmentpassage:With the globalization of trade and industry, the importance of English in higher education has been increasingly recognized. The following passage focuses on the role of English in modern academic research and its impact on students’ career prospects.English has become a global language of communication in higher education. It is not only a subject studied in colleges and universities but also a medium for conducting research and academic exchanges. Students who excel in English are more likely to participate in international projects, present their research findings at international conferences, and collaborate with peers from different countries. This not only enhances their academic skills but also broadens their horizons and improves their career opportunities.Moreover, proficiency in English helps students understand the latest developments in their fields of study. With the help of English, they can access various resources on the internet to gather information and gain knowledge easily. They are also better positioned to read books, research papers, and other literature published in English, which often offer deeper insights into variousdisciplines. As a result, students with good English skills are more competitive in the job market and are more likely to succeed in their chosen careers.Questions:1.English is not considered as a global language of communication in highereducation.2.Students who excel in English are less likely to participate ininternational projects.3.Proficient knowledge of English improves students’ career opportunitiesby enhancing their academic skills and broadening their horizons.4.Good English skills do not make students more competitive in the jobmarket.5.Studying English in higher education has no impact on students’understanding of the latest developments in their fields of study.Answers:1.错误(False)2.错误(False)3.正确(True)4.错误(False)5.错误(False)二、阅读理解(共10分)Passage 1:Text:In the modern world, technology plays a vital role in our daily lives. The evolution of smartphones has been a significant breakthrough in this field. From communication to entertainment, smartphones have revolutionized the way we live. They have become more than just a tool for making phone calls; they are now our companions, our connection to the world.Apps like social media, banking, and education have made smartphones more than just a device for communication. They provide us with information, entertainment, and education at our fingertips. With the help of smartphones, people can stay connected with their friends and family no matter where they are located. They can access the internet, check their emails, browse through news updates, and learn new things through various educational apps.Moreover, smartphones have also become an important tool for businesses. They help businesses stay connected with their customers, improve productivity, and manage their operations efficiently. With the help of mobile apps, businesses can provide better customer services and improve their overall performance.Questions:1.What has smartphones become in our daily lives?A. A tool for communication only.B. A companion and connection to the world.C. An instrument for entertainment purposes only.D. A device for learning only.答案:B. A companion and connection to the world。
百兆以太网ICIP101G规格书
百兆以太⽹ICIP101G规格书Single Port 10/100 MII/RMII/TP/FiberFast Ethernet Transceiver(85nm/Extreme Low PW, PWMT ? and EMIMT ?)Features General Descriptionz 10/100Mbps IEEE 802.3/802.3u compliant Fast Ethernet transceiverz Supports 100Base-TX/FX Media Interface z Supports MII/ RMII Interfacez Supports Auto MDI/MDIX function z Power Management Tool- APS, auto power saving while Link-off - 802.3az, protocol based power saving - WOL+, light traffic power saving - PWD, force-off power saving- Supports MII with LPI for RX and TX - Supports RMII with LPI for RXz Supports Base Line Wander compensation z Supports Interrupt functionz Built in synchronization FIFO to support jumbo frame size up to 12KB in MII mode (10KB in RMII 100Mbps mode)z Supports MDC and MDIO to communicate with the MACz EMI Management Tool - F/W based control- 4 levels for mapping the difference layoutlength on the PCBz Single 3.3V power supply z Built-in Vcore regulatorz DSP-based PHY Transceiver technology z System Debug Assistant Tool - 16 bit RX counter- 9 bit RXError/CRC counter - Isolate MII/RMII - RX to TX Loopback - Loopback MII/RMIIz Using either 25MHz crystal/oscillator or 50MHz oscillator REF_CLK as clock sourcez Built-in 49.9ohm resistors for simplifying BOMz Flexible LED display z Process: 85nmzPackage and operation temperatureIP101G: dice, 0~70℃IP101GA: 48LQFP , 0~70℃ IP101GR: 32QFN, 0~70℃ IP101GRI: 32QFN, -40~85℃IP101G is an IEEE 802.3/802.3u compliant single-port Fast Ethernet Transceiver for both 100Mbps and 10Mbps operations. It supports Auto MDI/MDIX function to simplify the network installation and reduce the system maintenance cost. To improve the system performance, IP101G provides a hardware interrupt pin to indicate the link, speed and duplex status change.IP101G provides Media Independent Interface (MII) or Reduced Media Independent Interface (RMII) to connect with different types of 10/100Mbps Media Access Controller (MAC). IP101G is designed to use category 5 unshielded twisted-pair cable or Fiber-Optic cables connecting to other LAN devices. A PECL interface is supported to connect with an external 100Base-FXfiber optical transceiver. Except good performance, reliability, rich power saving method and extreme low operating current, IP101G provides a serial tool for system designers to complete their projects easily. They are System Debug Assistant Tool and EMI Management Tool.IP101G is fabricated with advanced CMOS (85nm) technology and design is based onIC Plus’s 5th Ethernet-PHY architecture, this feature makes IP101G consumes very low power. Such as in the full load operation (100Mbps_FDX), it only takes below 0.15W. IP101GA / IP101GR&IP101GRI are available in 48LQFP/32QFN, lead-free package.* EMIMT: Patent under apply.Application■ NAS■ Network Printers and Servers ■ IP Set-Top Box ■IP/Smart TV■ Game console■ IP and Video Phone ■ PoE■Telecom Fiber deviceTable Of ContentsTable Of Contents (2)List of Figures (4)List of Tables (5)Revision History (6)Features comparison between IP101G and IP101A/IP101AH (7)Transmit and Receive Data Path Block Diagram (8)1Pin diagram (9)2Dice pad information (11)3Pin description (12)3.1IP101GA pin description (12)3.2IP101GR/GRI pin description (16)4Register Descriptions (19)4.1Register Page mode Control Register (20)4.2MII Registers (20)4.3MMD Control Register (30)4.4MMD Data Register (31)4.5RX Counter Register (34)4.6LED Pin Control Register (35)4.7WOL+ Control Register (36)4.8UTP PHY Specific Control Register (39)4.9Digital IO Pin Control Register (39)5Function Description (41)5.1Major Functional Block Description (41)5.1.1Transmission Description (41)5.1.2MII and Management Control Interface (42)5.1.3RMII Interface (43)5.1.4Flexible Clock Source (45)5.1.5Auto-Negotiation and Related Information (45) 5.1.6Auto-MDIX function (46)5.2PHY Address Configuration (46)5.3Power Management Tool (47)5.3.1Auto Power Saving Mode (47)5.3.2IEEE802.3az EEE (Energy Efficient Ethernet) (48) 5.3.3Force power down (48)5.3.4WOL+ operation mode (48)5.4LED Mode Configuration (52)5.5LED Blink Timing (52)5.6Repeater Mode (52)5.7Interrupt (52)5.8Miscellaneous (52)5.9Serial Management Interface (53)5.10Fiber Mode Setting (54)5.11Jumbo Frame (54)6Layout Guideline (55)6.1General Layout Guideline (55)6.2Twisted Pair recommendation (55)7Electrical Characteristics (56)7.1Absolute Maximum Rating (56)7.2DC Characteristics (56)7.3Crystal Specifications (57)7.4AC Timing (58)7.4.1Reset, Pin Latched-in, Clock and Power Source (58) 7.4.2MII Timing (59)7.4.3RMII Timing (60)7.4.4SMI Timing (61)7.5Thermal Data (61)8Order Information (62)9Physical Dimensions (63)9.148-PIN LQFP (63)9.232-PIN QFN (64)List of FiguresFigure 1 Flow chart of IP101G (8)Figure 2 IP101GA 48 Pin Diagram (9)Figure 3 IP101GR/GRI 32 Pin Diagram (10)Figure 4 IP101G dice pad information (11)Figure 5 LPI transition (43)Figure 6 IP101G/GA/GR/GRI MII Mode with LPI transition Block Diagram (43) Figure 7 IP101G/GA/GR/GRI MII Mode without LPI transition Block Diagram (43) Figure 8 IP101G RMII Mode with internal clock Block Diagram (44)Figure 9 IP101G RMII Mode with external clock Block Diagram (44)Figure 10 IP101G RMII Clock Application Circuit (45)Figure 11 IP101G link speed and EEE ability programming guide (46)Figure 12 PHY Address Configuration (47)Figure 13 Magic Packet Format (49)Figure 14 Sleep or wake up automatically programming guide (50)Figure 15 MAC control sleep or wake up programming guide (51)Figure 16 MDC/MDIO Format (53)Figure 17 IP101G Fiber Mode Setting (54)Figure 18 Reset, Pin Latched-In, Clock and Power Source Timing Requirements (58) Figure 19 MII Transmit Timing Requirements (59)Figure 20 MII Receive Timing Specifications (59)Figure 21 RMII Transmit Timing Requirements (60)Figure 22 RMII Receive Timing Specifications (60)Figure 23 SMI Timing Requirements (61)Figure 24 48-PIN LQFP Dimension (63)Figure 25 32-PIN QFN Dimension (64)List of TablesTable 1 Features comparison between IP101G and IP101A/IP101AH (7)Table 2 Register Map (19)Table 3 Flexible Clock Source Setting (45)Table 4 PHY Address Configuration (47)Table 5 WOL+ operation mode (49)Table 6 LED Mode 1 Function (52)Table 7 LED Mode 2 Function (52)Table 8 LED Blink Timing (52)Table 9 SMI Format (53)Table 10 DC Characteristics (56)Table 11 I/O Electrical Characteristics (56)Table 12 Pin Latched-in Configuration Resistor (57)Table 13 Crystal Specifications (57)Table 14 Reset, Pin Latched-in, Clock and Power Source Timing Requirements (58) Table 15 MII Transmit Timing Requirements (59)Table 16 MII Receive Timing Specifications (59)Table 17 RMII Transmit Timing Requirements (60)Table 18 RMII Receive Timing Specifications (60)Table 19 SMI Timing Requirements (61)Table 20 Thermal Data (61)Table 21 Part Number and Package (62)Revision HistoryRevision # Change DescriptionIP101G-DS-R01 Initial release.IP101G-DS-R01-20120622 Add 30 seconds into the definition for register WOL_PLUS_TIMER_SEL. IP101G-DS-R01-20120629 Add the symbol SC (Self Clear) for PHY MII register 0.15 Reset and 0.9Restart Auto-Negotiation.IP101G-DS-R01-20120709 1) Add LED mode 2 in the pin description and function description.2) Correct the table of LED Blink Timing.3) Add more description of PHY Address Configuration and IEEE 802.3az.4) Add ESD reliability of Absolute Maximum Rating.5) Correct the typo of function description for Auto Power Saving Mode.6) Change register P16R16[10] description from HEART_BEAT_EN toReserved.IP101G-DS-R01-20120719 Correct the table of Register Map for page selection.IP101G-DS-R01-20120726 1) Add more description of Register RX2TX_LPBK P1R23[13] for Rx to Txloopback test.2) Add more description on Fiber Mode Setting and latched-in pin signalson AC Timing.3) Add IP101AH into the table of features comparison.IP101G-DS-R01-20120808 1) Correct the I/O type of IP101GA pin description to O(Ouput) for pin24RXER.2) Change the pin name from DVDD33_IO to VDDIO.IP101G-DS-R01-20120821 1) Change the default value of register P16R27 from 0x0022 to 0x0012.2) Remove I/O Slew Rate Control Register.3) Change the register location RMII_WITH_ER from P16R29[0] toP16R29[7].IP101G-DS-R01-20120927 1) Add more description of low power idle (LPI) state in MII and RMIImodes.2) Correct the typo of Physical Dimensions.IP101G-DS-R01-20121101 Change the LED blink timing from “On 80ms -> Off (20~40)ms” to “On 26ms-> Off 78ms”.IP101G-DS-R01-20121113 Add more function description to support Jumbo Frame.IP101G-DS-R01-20121127 Change the LED mode function as same as IP101A.IP101G-DS-R01-20121224 Add the notice that does not let these PHY address pins floating for thelatched-in settings after the power is ready.IP101G-DS-R01-20130206 Change the AC timing Tclk_MII_rdy in Table 14 from 10ms Min. to 10ms Max. IP101G-DS-R01-20130312 1) Add more Min. and Max value on the AC Timing table.2) Add thermal data on the Table 20.IP101G-DS-R01-20130507 Add LED Pin Driving Control RegisterIP101G-DS-R01-20130621 Add GRI 2.5V I/O power supplyDisclaimerThis document probably contains the inaccurate data or typographic error. In order to keep this document correct, IC Plus reserves the right to change or improve the content of this document.Features comparison between IP101G and IP101A/IP101AHTable 1 Features comparison between IP101G and IP101A/IP101AHProduct Name IP101GR IP101G IP101GA IP101A IP101AH Package Type 32pin QFN Dice 48pin LQFP48pin LQFP REGOUT(1) Output Voltage and location 1.0V, pin28 1.0V, pad5and pad111.0V, pin82.5V, pin32REGIN Input Voltage and location NA(2) 1.0V,pad23and pad26NA 2.5V,pin8RMII mode setting Pin4 Pad18 Pin1 Pin1 and pin44Fiber mode setting: Fiber FXSD signal: Pin19Pin1Pad39Pad13Pin22Pin43NA Pin24 and pin48Pin37Number of LED 2 4 4 5LED mode 1 and 2 1 and 2LED Blink Timing On 26ms -> Off 78ms On 26ms -> Off 78msPHY address number(3) Single: 0 ~ 1Multi: 2 ~ 31Single: 0 ~ 7Multi: 8 ~ 31Single: 0 ~ 31Center-tap of transformer Do not connect to any power 2.5V input powerBuilt-in 49.9ohm resistors Yes NoPowerconsumption ~150mW ~480mW Process 85nm0.25µmIEEE 802.3az Yes No10Base TX amplitude ~1.75V (10Base-Te) ~2.5V(10Base-T) WOL+ (Wake On LAN Plus) Yes NoAnalog OFF Yes No16 bit RX counter Yes No9 bit RXER/CRC counter Yes NoRX to TX Loopback Yes NoLoopback MII/RMII Yes YesSNI mode No YesNote 1: Regulator voltage output is for internal use only. Do not supply to any other device.Note 2: Not available for this function. The 1.0V is supplied by the regulator that built-in the chip. Note 3: Do not let these PHY address pins floating for the latched-in settings after the power is ready.Transmit and Receive Data Path Block DiagramFigure 1 Flow chart of IP101G1Pin diagramRXER CRS/LEDMODRXDV/CRS_DV/FX_HEN X1X2RXD2RXD3RXCLK/50M_CLKO DGNDRXD0NCRESET_N IP101GA (LQFP-48)242322212019181716NC NC TXER/FXSDNC Those pins in "blue "are different from IP101A. NC Note:RXD1INTRNC DGNDNC LED3/PHY_AD3VDDIOFigure 2 IP101GA 48 Pin DiagramIP101GR/GRI (VQFN-32)(GND on bottom of chip)RXD3TXCLK/50M_CLKI RXCLK/50M_CLKO LED0/PHY_AD0LED3/PHY_AD3161514131211109 RESET_NISET REGOUT MDI_TN MDI_TP MDI_RP MDI_RN RXD2AVDD33 Figure 3 IP101GR/GRI 32 Pin Diagram2Dice pad informationIC LogoPad 1Pad 44Pad 11Pad 45Pad 24Pad 31Pad 12Pad 22Pad 23REGINPHYAD_LED028PHYAD_LED129VSS30PHYAD_LED231PHYAD_LED332VDDIO 33RX_CLK REGOUT 34VSSIO RESET_N 35RXD[3]TXER_FXSD 36RXD[2]VSSIO 37RXD[1]15X138RXD[0]16X239RXDV_FIBMOD 17INTR40CRS18COL_RMII 41RXER_INTR 19TX_EN 4220TXD[3]21TXD[2]22TXD[1]23REGINFigure 4 IP101G dice pad information3 Pin descriptionType DescriptionType DescriptionLI Latched Input in power up or reset PD Internal Pull-Down 104K ? I/O Bi-directional input and outputPUInternal Pull-Up 222K ?I Input Hi-Z High impedanceO Output P Power OD Open Drain3.1 IP101GA pin descriptionIP101GAPin no. LabelType Reset StateDescriptionSerial Management Interface Pins 25 MDC I Hi-Z Management Data Interface Clock: This pin provides a clock reference to MDIO. The clock rate can be up to 2.5MHz.26 MDIO I/O (PU) I (PU)Management Data interface Input/Output:Thefunction of this pin is to transfer management informationbetween PHY and MAC.MII/RMII Pins2 TXEN I (PD) I (PD)Transmit Enable or Signal Detect.43 TXER/FXSD I (PD) I (PD)Transmit Error or FXSD:This is a dual-function pin which is determined by themedia type selection. If RXDV/CRS_DV/FX_HEN islatched as “0 (default)” upon reset, the TP interface isselected and its function as TXER. If the fiber interface is selected, this pin’s function as FXSD.FXSD:0: Fiber link down; 1: Fiber link upTransmit Enable:TXEN TXER Description 1 1 Transmission errorpropagation.0 1 Combine TXD[3:0] that equalto 0001 for request PHY to enter LPI mode.1 0 0 0Normal operationThis pin TXER must be either floating or connecting to GND in RMII mode.7 TXCLK/50M_CLKI I/O Hi-Z Transmit Clock output or 50M clock input:In MII mode, this pin provides a continuous 25MHz clock at 100Base-TX and 2.5MHz at 10Base-T . In RMII mode, a 50Mhz clock should input to this pin for the timing reference of the internal circuit. 3,4,5,6 TXD[3:0] I Hi-Z Transmit Data Input:IP101GAPin no.LabelType ResetDescriptionStateIn MII mode, TXD[3:0] is synchronous to TXCLK.In RMII mode, TXD[1:0] is synchronous to 50M_CLKI.22 RXDV/CRS_DV/ FX_HEN O/LI (PD) I (PD)Receive Data Valid or Media Type Selection:FX_HENThe input state is latched upon reset to determine whether TP or fiber interface is selected. If it is at logic “0” (default) state upon reset, the TP interface is selected; otherwise the fiber interface is selected. RXDV/CRS_DVIn MII mode, this pin indicates the Receive Data Valid function.In RMII mode, this pin indicates the Carrier Sense and Receive Data Valid function.16 RXCLK/ 50M_CLKO O Hi-Z Receive Clock:In MII mode, this pin provides 25MHz for 100BT or2.5MHz for 10BT.In RMII mode, this pin output a 50 MHz clock for the timing reference of MAC side.18,19, 20,21 RXD[3:0] O Hi-Z Receive Data: In MII mode, RXD[3:0] is synchronous to RXCLK.In RMII mode, RXD[1:0] is synchronous to 50M_CLKI.24 RXER O Hi-Z Receive error:RXDV RXER Description1 1 Decoding error of thereceived signal0 1 Combine RXD[3:0] equal to0001 indicates PHY isreceiving LPI.1 0 0 0Normal operationThis pin RXER is an optional input for MAC/CPU device.1 COL/RMII O/LI (PD) I (PD)Collision Detected:During the normal operation, thispin outputs a high status signal it means collision isdetected.RMII Mode Selection: During the power on reset, thispin status is latched to determine what kind MAC interface will be used. Logic “1” is for RMII mode and logic “0” is for MII mode.23 CRS/LEDMOD O/LI (PD) I (PD)Carrier Sense: When signal output from this pin is highindicates the transmission or reception is in process andat low status means the line is in idle state.LEDMOD: During power on reset, this pin status is latched to determine which either LED mode 1 or 2is selected, please refer to the LED pins description.Cable Transmission Interface 34,33 MDI_TP MDI_TN I/O I/O Hi-Z Transmit Output Pair: Differential pair shared by100Base-TX and 10Base-T modes. When configured as100Base-TX, output is an MLT-3 encoded waveform. When configured as 10Base-T , the output is ManchesterIP101GAPin no. Label Type Reset DescriptionStatecode.31,30 MDI_RPMDI_RN I/OI/OHi-Z Receive Input Pair: Differential pair shared by 100Base-TX and 10Base-T modes.Clock and Miscellaneous Pins47 X2 O O 25MHz Crystal Output: Connects to crystal to providethe 25MHz output. It must be left open when X1 is drivenwith an external 25MHz oscillator.46 X1 I I 25MHz Crystal Input: Connects to crystal to provide the25MHz crystal input. If a 25MHz oscillator is used,connect X1 to the oscillator’s output. If a 50MHz clock isapplied to pin7 TXCLK/50M_CLKI, X1 must beconnected to GND or AGND33.42 RESET_N I I(PU)RESET_N: Enable a low status signal will reset the chip. For a complete reset function. 25MHz clock (x1) must be active for a minimum of 10 clock cycles before the rising edge of RESET_N. Chip will be able to operate after 2.5ms delay of the rising edge of RESET_N. The 2.5ms extension is to ensure the stability of system power.28 ISET I I Bandgap Circuit Resistor: This pin should beconnected to GND via a 6.19K? (1%) resistor to definethe standard current of the internal circuit.48 INTR OD Hi-Z Interrupt: Programmable Interrupt Output, this is anopen drain output, and an external pulled-up resistor isneeded for normal mode operation. Another operationmode is Rx to Tx loopback debugging test (reflect onRegister P1R23[13] RX2TX_LPBK) when connect INTRpin to GND.9 LED0/PHY_AD0 O/LI Hi-Z LED 0 and PHY Address [0]LED 0LED mode1 2LED0Link Link/ACT(blinking)10 LED1/PHY_AD1 O/LI Hi-Z LED 1 and PHY Address [1]LED1LED mode1 2LED1Duplex Duplex /COL (blinking)12 LED2/PHY_AD2 O/LI Hi-Z LED 2 and PHY Address [2]LED2LED mode1 2LED210M Link /ACT10M Link13 LED3/PHY_AD3 O/LI(PD) Hi-Z LED 3 and PHY Address [3]LED3LED mode1 2LED3100M Link /ACT 100M Link27 TEST_ON I I Test Enable: Set this pin to high to enable Test mode.IP101GAPin no. Label Type Reset DescriptionState(PD) (PD)For normal operation, this pin doesn’t need to be connected.Power and Ground32 NC -- -- It’s a NC pin.8 REGOUT P P Regulator Power Output: This is a regulator power output. A 10uF and 0.1uF should be connected to this pinto filter the power noise.14 VDDIO P P Digital Power input:Either 3.3V or 2.5V for I/O power supply.36 AVDD33 P P 3.3V Analog power input: This is a 3.3V power supply for analog circuitry, and it should be decoupled carefully.35 AGND33 P P Ground.29 AGND1V P P Ground45,11,17 DGND P P Ground.3.2 IP101GR/GRI pin descriptionIP101GR/GRIPin no. Label Type ResetStateDescriptionSerial Management Interface Pins22 MDC I Hi-Z Management Data Interface Clock: This pin provides a clock reference to MDIO. The clock rate can be up to2.5MHz.23 MDIO I/O(PU)I(PU)Management Data interface Input/Output:Thefunction of this pin is to transfer management informationbetween PHY and MAC.MII/RMII Pins5 TXEN I(PD)I(PD)Transmit Enable or Signal Detect.1 TXER/FXSD I(PD)I(PD)Transmit Error or FXSD:This is a dual-function pin which is determined by the media type selection. If RXDV/CRS_DV/FX_HEN is latched as “0 (default)” upon reset, the TP interface is selected and its function as TXER. If the fiber interface is selected, this pin’s function as FXSD.FXSD:0: Fiber link down; 1: Fiber link upTransmit Enable:TXEN TXER Description1 1 Transmissionerrorpropagation.0 1 CombineTXD[3:0]thatequalto 0001 for request PHY toenter LPI mode.1 00 0Normal operationThis pin TXER must be either floating or connecting toGND in RMII mode.10 TXCLK/50M_CLKI I/O Hi-Z Transmit Clock output or 50M clock input: In MII mode,this pin provides a continuous 25MHz clockat 100Base-TX and 2.5MHz at 10Base-T.In RMII mode, a 50Mhz clock should input to this pin forthe timing reference of the internal circuit.6,7,8,9 TXD[3:0] I Hi-Z Transmit Data Input:In MII mode, TXD[3:0] is synchronous to TXCLK.In RMII mode, TXD[1:0] is synchronous to 50M_CLKI.19 RXDV/CRS_DV/FX_HEN O/LI(PD)I(PD)Receive Data Valid or Media Type Selection:FX_HENThe input state is latched upon reset to determinewhether TP or fiber interface is selected. If it is at logic“0” (default) state upon reset, the TP interface isselected; otherwise the fiber interface is selected.RXDV/CRS_DVIn MII mode, this pin indicates the Receive Data ValidIP101GR/GRIPin no.LabelType ResetDescriptionStatefunction.In RMII mode, this pin indicates the Carrier Sense and Receive Data Valid function.14 RXCLK/ 50M_CLKO O Hi-Z Receive Clock:In MII mode, this pin provides 25MHz for 100BT or2.5MHz for 10BT.In RMII mode, this pin output a 50 MHz clock for the timing reference of MAC side.15,16, 17,18 RXD[3:0] O Hi-Z Receive Data: In MII mode, RXD[3:0] is synchronous to RXCLK. In RMII mode, RXD[1:0] is synchronous to 50M_CLKI.21 RXER/INTR_32 O/ODHi-Z The multiplex function of this pin is set by the registerSEL_INTR32, page 16,29[2]. The default function is RXER.Receive error:RXDV RXER Description 1 1 Decoding error of thereceived signal0 1 Combine RXD[3:0] equal to0001 indicates PHY is receiving LPI.1 0 0 0Normal operationThis pin RXER is an optional input for MAC/CPU device.Interrupt: Programmable Interrupt Output, this is an open drain output, and an external pulled-up resistor is needed.4 COL/RMII O/LI (PD) I (PD)Collision Detected:During the normal operation, thispin outputs a high status signal it means collision isdetected.RMII Mode Selection: During the power on reset, thispin status is latched to determine what kind MAC interface will be used. Logic “1” is for RMII mode and logic “0” is for MII mode.20 CRS/LEDMOD O/LI (PD) I (PD)Carrier Sense:When signal output from this pin is highindicates the transmission or reception is in process andat low status means the line is in idle state.LEDMOD: During power on reset, this pin status is latched to determine which either LED mode 1 or 2is selected, please refer to the LED pins description.Cable Transmission Interface 30,29 MDI_TP MDI_TN I/O I/O Hi-Z Transmit Output Pair: Differential pair shared by100Base-TX and 10Base-T modes. When configured as100Base-TX, output is an MLT-3 encoded waveform. When configured as 10Base-T , the output is Manchester code.27,26 MDI_RP MDI_RN I/O I/O Hi-Z Receive Input Pair: Differential pair shared by100Base-TX and 10Base-T modes.Clock and Miscellaneous PinsIP101GR/GRIPin no. Label Type Reset DescriptionState3 X2 O O 25MHz Crystal Output: Connects to crystal to providethe 25MHz output. It must be left open when X1 is drivenwith an external 25MHz oscillator.2 X1 I I 25MHz Crystal Input: Connects to crystal to provide the25MHz crystal input. If a 25MHz oscillator is used,connect X1 to the oscillator’s output. If a 50MHz clock isapplied to pin10 TXCLK/50M_CLKI, X1 must beconnected to GND.32 RESET_N I I(PU)RESET_N: Enable a low status signal will reset the chip. For a complete reset function. 25MHz clock (x1) must be active for a minimum of 10 clock cycles before the rising edge of RESET_N. Chip will be able to operate after 2.5ms delay of the rising edge of RESET_N. The 2.5ms extension is to ensure the stability of system power.25 ISET I I Bandgap Circuit Resistor: This pin should beconnected to GND via a 6.19K? (1%) resistor to definethe standard current of the internal circuit.11 LED0/PHY_AD0 O/LI Hi-Z LED 0 and PHY Address [0]LED 0LED mode1 2LED0Link Link/ACT(blinking)12 LED3/PHY_AD3 O/LI(PD) Hi-Z LED 3 and PHY Address [3]LED3LED mode1 2LED3100M Link /ACT 100M Link24 TEST_ON I(PD)I(PD)Test Enable: Set this pin to high to enable Test mode.For normal operation, this pin doesn’t need to beconnected.Power and Ground28 REGOUT P P Regulator Power Output: This is a regulator power output. A 10uF and 0.1uF should be connected to this pinto filter the power noise.13 VDDIO P P Digital Power input:IP101GR/GRI: Either 3.3V or 2.5V for I/O power supply.31 AVDD33 P P 3.3V Analog power input: This is a 3.3V power supply for analog circuitry, and it should be decoupled carefully.Bottom PAD GND PPGround.4 Register DescriptionsTable 2 Register MapPage Register Description Default NoteRegister 0x0010X 20 PageControlRegister 0x3100-- 0 ControlRegister 0x7849-- 1 Status-- 2 PHY Identifier 1 Register 0x0243-- 3 PHY Identifier 2 Register 0x0C54Advertisement Register 0x01E1-- 4 Auto-Negotiation-- 5 Auto-Negotiation Link Partner Ability Register 0x0000-- 6 Auto-Negotiation Expansion Register 0x0004-- 7 Auto-Negotiation Next Page Transmit Register 0x2001-- 8 Auto-Negotiation Link Partner Next Page Register 0x0000-- 13 MMD Access Control Register 0x0000-- 14 MMD Access Address Data Register 0x000016 16 PHY Specific Control Register 0x000216 17 PHY Interrupt Ctrl/Status Register 0x0F0016 18 PHY Status Monitoring Register 0x020816 26 Digital IO Pin Driving Control Register 0x124916 27 Digital IO Pin Driving Control Register 0x001216 28 LED Pin Driving Control Register 0x000116 29 Digital I/O Specific Control Register 0x008216 30 PHY MDI/MDIX Control and Specific Status Register 0x0000 -- MMD 3.0 PCS Control 1 Register 0x0000-- MMD 3.1 PCS Status 1 Register 0x0000-- MMD 3.20 EEE Capability Register 0x0002-- MMD 3.22 EEE Wake Error Count Register 0x0000-- MMD 7.60 EEE Advertisement Register 0x0002-- MMD 7.61 EEE Link Partner Ability Register 0x00001 17 PHY Specific Control Register 0x00001 18 RX CRC Error Counter Register 0x00001 22 Linear Regulator Output Control Register 0x20201 23 UTP PHY Specific Control Register 0x80002 18 RX Packet Counter Register 0x00003 16 LED Mode Control Register 0x00004 16 WOL+ Control Register 0x5F404 22 Digital IO Pin Driving Control Register 0x40005 16 PHY WOL+ MAC Address Register 0x00008 17 RX Counter Control Register 0x7000。
Compur Monitox plus 产品说明书
Operating Instructions Compur Monitox plusSubject to changes without notice.Copyright Compur Monitors MünchenEditor: Compur Monitors GmbH & Co. KGWeissenseestr. 101Content Page Monitox plus overview 31. Product description 31.1. Application 31.2. Functional test 31.3. Earphone 41.4. Storage 42. Calibration 42.1. Gas calibration 42.2. Current calibration 52.3. Oxygen sensor 53. Alarm thresholds 54. Maintenance 64.1. Filter cap replacement 64.2. Sensor replacement 64.3. Battery replacement 65. Accessories 66. Error messages 77. Status messages 88. Technical Data 99. Declaration of Conformity 10 Safety InstructionsThis safety equipment is an explosion-proof device certified for group II category 2. Its intended use is the measurement of toxic gases or oxygen. Designed with increased safety it is applicable in zone 1 and zone 2.Please observe the following warning and safety guidelines:• The equipment may only be used in the specified environmental conditions. Adverse conditions might damage the device and thus endanger the user.• The temperature range for the device may not be exceeded.• You may only use batteries specified in the “Technical Data” of the manufacturer.• Please do not change the batteries in potentially explosive atmosphere.• You may only use original equipment and spare parts.• Please follow the instructions given in the operating manual.n Filter cap: Gas specific protection for the sensoro Sensorp Buzzerq LCD-Display:r Switch:OFF: Instrument is offTEST: SelftestON: Measuring mode.s Button Cal: Operate with pin.t Lithium batteries: In a battery pack - replaceable.u LED: Flashing when alarm threshold is exceeded orin case of an error.v Earphone jack1. Product description1.1 Applicationz The Compur Monitox plus warns the user when a toxic gas is present or oxygen deficiency occurs.z It should be worn near the breathing zone.z The display shows the actual gas concentration in ppm, ppb or %/Vol.z The Compur Monitox plus is not designed to monitor process gas streams or permantlyhigh concentrations.z Wear the instrument near the breathing zone using the clip or neck chain.z The filter cap should be protected from dripping water and exposure to excessive dust.z The Monitox comes with a steel clip and neck chain. A suspender and belt clip are optional.Move switch in “TEST”position : Electronics, batteries,speaker, LED and Display will be tested.Move switch in “ON”position: Now you can test the Monitoxusing the optional gas generator. Depending on the gasgenerator model, the black switch pin is operatedautomatically or must be held down manually.The gas generator produces a test gas for 10 seconds.The test gas concentration is slightly above the alarmthreshold. After 10 s the gas production stops automaticallyand the green LED of the generator goes off.Within these 10 seconds the Monitox should give an alarm.1.3 EarphoneFor use in a loud environment the optional earphone can be connected to jack (9).1.4 StorageShort term: Switch in position “OFF”.More than 1 month: Remove sensor and battery pack.2. CalibrationMove switch in position “TEST”.Press the button marked “Cal”, using the supplied pushpin.The display will show “000”flashing until the zero has been adjusted. This procedure must be done in a clean atmosphere. Now the display will alternate between “GCAL” and “ICAL”. To start a current calibration push the cal button while “ICAL” is active, to start a gas calibration push it when “GCAL” is active.2.1 Gas calibration- Place Monitox plus gas adapter (part # 569747) securely on the filter cap.- Connect span gas.NOTE: If using HCN, Cl2 or other corrosive gases, use non-porus tubing such asTygon lined with teflon or polypropylene.- Open gas cylinder. The recommended flow is 250 ml / min, for Phosgene: 500 ml / min.-Now push the “CAL” button while “GCAL” is active. The display flashes “GCAL”.- When “GCAL” is steady, a stable measured value has been reached.- Close the gas cylinder.- Push “Cal” button.- Now the display shows the most recently used span gas concentration. Confirm by pushing “Cal” or alter by pushing and holding “Cal”.- Your operation will be confirmed by the unit displaying “Stor”.- The Monitox will now perform another self test and then show the actual gas concentration. - Move switch to “ON” position.2.2 Current calibrationThis procedure must only be done when using new sensors. You can find the sensor specific current on the sensor label.Push the “Cal” button while “ICAL” is active on the display.Now the display shows the current of the sensor that has most recently been used. If the current on the display is correct, confirm it by moving the switch to “ON”, or alter by pushing and holding the “Cal” button.2.3 Oxygen sensorThe calibration procedure is the same as above, but you can use fresh air as span gas. Fresh air always contains 20,9 % oxygen. Zero can be adjusted with pure Nitrogen (GCAL) or electronically (ICAL).3. Alarm thresholdsCompur Monitors recommends to strictly observe the local regulations for the alarm thresholds. Open the instrument. Use proper safety measures for handling CMOS components.Place switch in “TEST” position.Following the normal self test which occurs when powering on, push button “A1”. The display will now show the active alarm threshold and an arrow. To increase the threshold push and hold “A1”. To decrease the threshold push and hold ”A2”. If the desired alarm threshold appears on the display release the button and thus save the new value. Now move the switch into position “ON”.Follow the same procedures for setting the alarm threshold for A2.4. Maintenance4.1 Filter cap replacementCarefully turn the old filter cap 90° counter clockwise. Insert the new filter cap. Turn 90° clockwise. Make sure to use only filter caps for the relevant gas!4.2 Sensor replacementRemove filter cap. Pull sensor out. Some sensors are shipped with a plug that short circuits the contacts. Remove this. Check best before date of the sensor. Note the output current, which is on the sensor label. Perform a current calibration.4.3 Battery replacementOpen the instrument. Disconnect and remove the battery pack. Remove battery pack cover. Replace the batteries. Observe the proper polarity, as is illustrated on the battery pack cover. Close, connect and mount the battery pack. Perform a functional test.5. AccessoriesArticle No.: 566032EarphonePouch 503746LeatherSteel clip 568434569747GasadapterSuspender Clip 554566Belt Clip 568434Gas generator H2S 510329Gas generator COCI2510634Gas generator HCN 100 ppm 510717Gas generator HCN 20 ppm 510640Gas generator NO2510741510790COGasgeneratorGas generator CI2510204Gas generator SO2510279Whenever a malfunction occurs, the Compur Monitox plus will give you an error message.The sensor current obtained during gas calibration is out of range.z Calibration gas concentration must be within 0,5 TLV and full scale.z Switch instrument off and on again to make it operate with the old calibration data.z Sensor defective: Replace sensor.The switch has been moved into the “ON”- position during calibration. Theinstrument stops working.z Switch instrument off and on again to make it operate with the old calibration data.Temperature is out of range. This message is displayed for a short timeinterval. Then the Monitox will go on to operate.z The instrument operates out of the temperature - compensated range. Bring it into the specified temperature.EEPROM defective. The instrument stops operating.z The instrument must be serviced.The A/D-Converter input voltage is out of range. The instrument stopsworking.z Switch instrument off and on again.z If error persists, check sensor.z If the sensor is OK and the problem persists, the instrument must be serviced.Sensor is missing, has bad contact or is defective.z Replace sensor.z Check contacts.z If no success, replace sensor.The Monitox NO2 0-10 ppm, NO2 0-50 ppm and CI2 do not have this feature.The status messages give information about the mode in which the instrument operates.New data in the menu GCAL, ICAL, A1 or A2 have been stored.Autozero in process.Gas calibration.Current calibration.Intermediate display when the operation mode has been altered and during the self-test.Self test in process.Battery pre-alarm: “Batt“ and the actual measured value alternate on the display.Buzzer gives a frequent beep.8 hours of battery capacity remain.alarm: “Batt“ is steady on the display.BatterieBattery empty. Instrument stops working.z Replace batteries.8. Technical data500Type: 5306Manufacturer: Compur Monitors, MünchenProtection class: EEx ib IIC T6Operating environment: II 2 GOperating temperature: -20°C to +50°C ( -4°F to + 122°F)Power supply: 2 x Li, 3V:only CR 2477N (Renata) or CR 2477 (Panasonic)Sensor principle ElectrochemicalHumidity typ.: 20% to 90% r.h.Pressure 920 hPa – 1120 hPaDisplay 4-digitLCD-DisplayWeight 130 g (4,6 oz)Dimensions (With filter cap) 4,9 x 2,6 x 1“Battery lifetime about 800 hoursAlarm thresholds adjustable range 0 – 100% of rangeAlarms loudness typ.: 80 db (A) / 30 cmTerminal EarphoneSensor warranty 6 to 12 monthsSpecifications are subject to change without notice, and are provided only for comparison of products. The conditions, under which our products are used, are beyond our control. Therefore, the user must fully test our products and/or information to determine suitability for any intended use, application, condition or situation. All information is given without warranty or guarantee. Compur Monitors disclaims any liability, negligence or otherwise, incurred in connection with the use of the products and information. Any statement or recommendation not contained herein is unauthorized and shall not bind Compur Monitors. Nothing herein shall be construed as a recommendation to use any product in conflict with patents covering any material or device or its use. No licence is implied or in fact granted under the claims of any patent. Instruments are manufactured by Compur Monitors GmbH & Co. KG, Munich.The General Conditions of Supply and Service of Compur Monitors GmbH & Co. KG are applicable.。
F-Tile Dynamic Reconfiguration Design Example User

F-Tile Dynamic Reconfiguration Design Example User GuideUpdated for Intel® Quartus® Prime Design Suite: 21.3Online VersionSend FeedbackUG-20342ID: 710582 Version: 2021.11.17Contents Contents1. Quick Start Guide (3)1.1. Hardware and Software Requirements (4)1.2. Generating the Design (4)1.2.1. Design Example Parameters (5)1.3. Directory Structure (5)1.4. Compiling the Compilation-Only Project (6)1.5. Simulating the Design Example Testbench (6)2. Detailed Description for CPRI Multirate Design Example (8)2.1. Functional Description (8)2.1.1. Simulation Testbench (8)2.1.2. Reset Scheme (9)2.2. Registers (9)3. Document Revision History for F-Tile Dynamic Reconfiguration Design ExampleUser Guide (10)F-Tile Dynamic Reconfiguration Design Example User Guide Send Feedback21. Quick Start GuideThe F-Tile Dynamic Reconfiguration IP provides a simulation testbench and hardware design example that supports compilation and simulation. When you generate the design example, the parameter editor automatically creates the files necessary to simulate, compile, and test the design in hardware.Intel ® also provides a compilation-only example project that you can use to quickly estimate IP core area and timing.Note: Hardware support for design example will be available in a future version of the Intel Quartus ® Prime Pro Edition.Figure 1.Development Steps for the Design ExampleThe F-Tile Dynamic Reconfiguration design example supports the following design variants:Table 1.Supported ConfigurationIP ProtocolBase VariantTarget Variants Supporting Dynamic ReconfigurationCPRI24G CPRI RS-FEC24G CPRI RS-FEC10G CPRI9.8G CPRI 4.9G CPRI 2.4G CPRI710582 | 2021.11.17Send FeedbackIntel Corporation. All rights reserved. Intel, the Intel logo, and other Intel marks are trademarks of Intel Corporation or its subsidiaries. Intel warrants performance of its FPGA and semiconductor products to current specifications in accordance with Intel's standard warranty, but reserves the right to make changes to any products and services at any time without notice. Intel assumes no responsibility or liability arising out of the application or use of any information, product, or service described herein except as expressly agreed to in writing by Intel. Intel customers are advised to obtain the latest version of device specifications before relying on any published information and before placing orders for products or services.*Other names and brands may be claimed as the property of others.ISO9001:2015Registered1.1. Hardware and Software Requirements•Intel Quartus Prime Pro Edition software •System console •Supported simulators:—Synopsys* VCS*—Siemens* EDA ModelSim* SE or Questa*1.2. Generating the DesignFigure 2.Procedure1.In the IP Catalog, locate and select F-Tile Dynamic Reconfiguration Intel FPGA IP . The New IP Variation window appears.2.Specify a top-level name <your_ip> for your custom IP variation. The parameter editor saves the IP variation settings in a file named as <your_ip>.ip .3.On the IP tab, specify the parameters for your IP core variation.4.On the Example Design tab, under Available Example Design , select the Protocol and Base Variant .5.On the Example Design tab, under Example Design Files , select theSimulation option to generate the testbench and the compilation-only project.6.On the Example Design tab, under Generated HDL Format , select Verilog HDL.7.Click theGenerate Example Design button. The Select Example Design Directory window appears.If you want to modify the design example directory path or name from the default value (dr_f_0_example_design ), browse to the new path and type the new design example directory name (<design_example_dir>).1. Quick Start Guide 710582 | 2021.11.17F-Tile Dynamic Reconfiguration Design Example User Guide Send Feedback41.2.1. Design Example ParametersFigure 3.Example Design TabTable 2.Design Example ParametersParametersValue DescriptionSelect Protocol CPRISelect the IP protocol for dynamic reconfiguration.Select Base Variant 24G CPRI RS-FECSelect the configuration of base variant for dynamic reconfiguration.Example Design FilesSimulation SynthesisSimulation option generates the testbench andcompilation-only project. Synthesis option generates the hardware design example.Note: Hardware design example support will beavailable in a future version of the Intel Quartus Prime Pro Edition.Generated HDL Format VerilogSelect the HDL files format.1.3. Directory StructureThe F-Tile Dynamic Reconfiguration design example generates the following files:Table 3.Testbench File Descriptions for CPRI Multirate Design Example1. Quick Start Guide 710582 | 2021.11.17Send FeedbackF-Tile Dynamic Reconfiguration Design Example User Guide5File NamesDescriptionTestbench Scripts<design_example_dir>/example_testbench/run_vsim.doThe Siemens EDA ModelSim SE or Questa or Questa-Intel FPGA Edition script to run the testbench.<design_example_dir>/example_testbench/run_vcs.shThe Synopsys VCS script to run the testbench.1.4. Compiling the Compilation-Only ProjectTo compile the compilation-only example project, follow these steps:1.Ensure compilation design example generation is complete.2.In the Intel Quartus Prime Pro Edition software, open the Intel Quartus Prime Pro Edition project <design_example_dir>/compilation_test_design/cpriphy_dr_ed.qpf .3.On the Processing menu, click Start Compilation .4.After successful compilation, reports for timing and for resource utilization are available in your Intel Quartus Prime Pro Edition session.Related Information Block-Based Design Flows1.5. Simulating the Design Example TestbenchFigure 4.ProcedureFollow these steps to simulate the testbench:1.At the command prompt, change to the testbench simulation directory <design_example_dir>/example_testbench .cd <my_design>/example_testbench2.Run quartus_tlg on the generated project file:•For CPRI Multirate Design Example:quartus_tlg cpriphy_dr_ed_wrapper3.Run ip-setup-simulation :•For CPRI Multirate Design Example:ip-setup-simulation –output-directory=./sim_script –quartus-project=cpriphy_dr_ed_dut_wrapper.qpf1. Quick Start Guide 710582 | 2021.11.17F-Tile Dynamic Reconfiguration Design Example User Guide Send Feedback64.Run the simulation script for the supported simulator of your choice. The script compiles and runs the testbench in the simulator . Refer to the table Steps to Simulate the Testbench .5.Analyze the results. The successful simulation displays "Testbench Passed"message.Table 4.Steps to Simulate the Testbench in Synopsys VCS* Simulator1. Quick Start Guide 710582 | 2021.11.17Send FeedbackF-Tile Dynamic Reconfiguration Design Example User Guide72. Detailed Description for CPRI Multirate Design ExampleThis section provides additional information relevant to the CPRI Multirate design example variant.2.1. Functional Description2.1.1. Simulation TestbenchFigure 5.Simulation Testbench Block Diagram0 M H z156.25 M H z184.32 M H z153.6 M H z The testbench program is controlling the testbench components via Avalon ® memory-mapped interface access, status and control signals. The Avalon memory-mapped interface arbiter is used to decode the Avalon memory-mapped interface access from testbench program into multiple Avalon memory-mapped interface slaves.Simulation Flow:•Testbench packet round-trip measurement is disabled.•CPRI PHY Multirate IP DUT is power-up based on profile 0 (24G RSFEC).•Initialize the testbench variables based on power-up profile. The variables are:—cpri_speed : To indicate the speed of the current profile.—enable_rsfec : To indicate whether rsfec is enabled or disabled for thecurrent profile.—current_dr_profile : To indicate the ID of the current profile.•Perform dynamic reconfiguration.•Check the testbench error flag and determine whether testbench passed or failed.This error flag is set to 1 if there is any error after dynamic reconfiguration traffic tests.710582 | 2021.11.17Send FeedbackIntel Corporation. All rights reserved. Intel, the Intel logo, and other Intel marks are trademarks of Intel Corporation or its subsidiaries. Intel warrants performance of its FPGA and semiconductor products to current specifications in accordance with Intel's standard warranty, but reserves the right to make changes to any products and services at any time without notice. Intel assumes no responsibility or liability arising out of the application or use of any information, product, or service described herein except as expressly agreed to in writing by Intel. Intel customers are advised to obtain the latest version of device specifications before relying on any published information and before placing orders for products or services.*Other names and brands may be claimed as the property of others.ISO9001:2015RegisteredFor customization, you can modify the following localparams:•EN_DR_TO_24G_RSFEC•EN_DR_TO_10G•EN_DR_TO_9P8G•EN_DR_TO_4P9G•EN_DR_TO_2P4GTestbench executes the entire sequence if all the localparam above are set to 1.Specific sequence will be skipped if the corresponding localparam is set to 0. Forexample:1.If all localparam are set to 1, the dynamic reconfiguration sequence is24.3G with RSFEC (power up) > 10G > 9.8G > 4.9G > 2.4G > 24.3G with RSFEC2.If the localparams are set to the following values:•EN_DR_TO_24G_RSFEC = 0; // Skipped•EN_DR_TO_10G = 1; // Enabled•EN_DR_TO_9P8G = 0; // Skipped•EN_DR_TO_4P9G = 1; // Enabled•EN_DR_TO_2P4G = 0; // Skippedthe dynamic reconfiguration sequence is24.3G with RSFEC (power up) > 10G > 4.9G2.1.2. Reset SchemeThe i_reconfig_reset signal resets the soft registers of CPRI Multirate Intel FPGAIP core and Dynamic Reconfiguration Controller IP. After power up and before startingdynamic reconfiguration sequences, this reset is asserted and released once. Thisreset must not be asserted afterwards.The datapath resets, i_rst_n, i_tx_rst_n, and i_rx_rst_n must be assertedwhen performing the dynamic reconfiguration.2.2. RegistersTable 5.Address MapAddress Range Maps to0x00000000 - 0x0000003F CPRI Soft Registers0x0C000000 - 0x0C00FFFF CPRI PCS Registers0x04000000 - 0x040FFFFF CPRI Transceiver Registers0x0B000000 - 0x0B0003FF Dynamic Reconfiguration Controller Registers2. Detailed Description for CPRI Multirate Design Example710582 | 2021.11.17Send Feedback F-Tile Dynamic Reconfiguration Design Example User Guide93. Document Revision History for F-Tile Dynamic Reconfiguration Design Example User GuideDocument VersionIntel Quartus PrimeVersionChanges2021.11.1721.3Initial release.710582 | 2021.11.17Send FeedbackIntel Corporation. All rights reserved. Intel, the Intel logo, and other Intel marks are trademarks of Intel Corporation or its subsidiaries. Intel warrants performance of its FPGA and semiconductor products to current specifications in accordance with Intel's standard warranty, but reserves the right to make changes to any products and services at any time without notice. Intel assumes no responsibility or liability arising out of the application or use of any information, product, or service described herein except as expressly agreed to in writing by Intel. Intel customers are advised to obtain the latest version of device specifications before relying on any published information and before placing orders for products or services.*Other names and brands may be claimed as the property of others.ISO9001:2015Registered。
ESP8266-DevKitS用户指南说明书

ESP8266-DevKitSUser GuideVersion 1.0Espressif SystemsCopyright © 2020About This Guide This user guide provides information on ESP8266-DevKitS-development board.Release NotesDate Version Release notes2020.02V1.0Initial release.Documentation Change NotificationEspressif provides email notifications to keep customers updated on changes totechnical documentation. Please subscribe here.CertificationDownload certificates for Espressif products from here.Tables of Contents ................................................................................................................................ 1.Overview 1.......................................................................................................... 2.Functional Description 2............................................................................................................ 3.How to Flash a Board 4................................................................................................................3.1.Hardware Preparation 4.........................................................................................................................3.2.Hardware Setup 4..........................................................................................................................3.3.Software Setup 4................................................................................................................. 4.Board Dimensions 5.............................................................................................................. 5.Hardware Reference 6............................................................................................................................5.1.Block Diagram 65.2.Power Supply Options 6...........................................................................................................................................................................................................................................5.3.Header Blocks 6A.Appendix—Learning Resources 8.........................................................................................................................................................................................................A.1.Must-Read Documents 8................................................................................................................A.2.Must-Have Resources 91. Overview 1.OverviewESP8266-DevKitS is Espressif’s flashing board designed specifically for ESP8266. It can beused to flash an ESP8266 module without soldering the module to the power supply andsignal lines. With a module mounted, ESP8266-DevKitS can also be used as a minidevelopment board like ESP8266-DevKitC.ESP8266-DevKitS supports the following ESP8266 modules:-ESP-WROOM-02-ESP-WROOM-02D-ESP-WROOM-02U2. Functional Description 2.Functional DescriptionFigure 2-1. ESP8266-DevKitSThis chapter introduces key components, interfaces and controls of ESP8266-DevKitSdevelopment board:•Spring PinsConnect and fix the module. These spring pins fit castellated holes on the module.• 2.54 mm Female HeadersConnect to jumper wires and other development boards. For description of femaleheaders, please refer to 5.3 Header Blocks.•USB-to-UART BridgeA single chip USB-UART bridge provides up to 3 Mbps transfers rates.2. Functional Description •LDO5V-to-3.3V Low dropout voltage regulator (LDO).•Boot ButtonDownload button. Holding down the Boot button and pressing the EN button initiates the firmware download mode. Then users can download firmware through the serial port.•Micro USB Port/Micro USB ConnectorUSB interface. Power supply for the board and the communication interface betweena computer and the board.•EN ButtonReset button. Pressing this button resets the system.•Power On LEDTurns on when the USB or power supply is connected to the board.3. How to Flash a Board 3.How to Flash a Board 3.1.Hardware Preparation• 1 x ESP8266 module of your choice• 1 x USB 2.0 cable (Standard-A to Micro-B)• 1 x PC loaded with Windows, Linux or Mac OS3.2.Hardware SetupPlease mount a module of your choice onto your ESP8266-DevKitS according to thefollowing steps:•Gently put your module on the ESP8266-DevKitS board. Make sure that castellated holes on your module are aligned with spring pins on the board.•Press your module down into the board until it clicks.•Check whether all spring pins are inserted into castellated holes. If there are some misaligned spring pins, place them into castellated holes with tweezers.3.3.Software SetupFor step-by-step introductions, please refer to ESP8266 Quick Start Guide.Note:1.To flash binary files, the ESP32 chip should be set to UART boot mode. This can be done either by theflash tool automatically, or by holding down the Boot button and tapping the EN button.2.After binary files have been flashed, please reset or power up your ESP32 module again to run theflashed application (this step is executed automatically by the flash tool by default).4. Board Dimensions 4.Board DimensionsFigure 4-1. Board Dimensions5.Hardware Reference 5.1.Block DiagramFigure 5-1. ESP8266-DevKitS Block Diagram5.2.Power Supply OptionsThere are three mutually exclusive ways to provide power to the board:•Micro USB port, default power supply•5V and GND header pins•3V3 and GND header pinsIt is advised to use the first option: micro USB port.5.3.Header BlocksTable 5-1. Header BlockLocation Label SignalL1G GNDL23V3VDD 3V3L33V3VDD 3V3L4EN CHIP_ENL5G GNDL614GPIO14L712GPIO12L813GPIO13L915GPIO15L102GPIO2L110GPIO0L12G GNDL135V External 5VL14G GNDL15G GNDR1G GNDR216GPIO16R3G GNDR4TX U0TXDR5RX U0RXDR6G GNDR74GPIO4R8RST EXT_RSTBR95GPIO5R10ADC To TOUT after a voltage divider R11G GNDR12G GNDR13G GNDR14G GNDR15G GNDA.Appendix—LearningResources A.1.Must-Read Documents•ESP8266-DevKitS Reference DesignDescription: This zip package include ESP8266-DevKitS schematics, PCB layout,gerber and BOM files, and spring design files.•ESP8266 Quick Start GuideDescription: This document is a quick user guide to getting started with ESP8266. Itincludes an introduction to the ESP-LAUNCHER, how to download firmware on to theboard and run it, how to compile the AT application, structure and the debuggingmethod of RTOS SDK. Basic documentation and other related resources for theESP8266 are also provided.•ESP8266 SDK Getting Started GuideDescription: This document takes ESP-LAUNCHER and ESP-WROOM-02 as examplesto introduce how to use ESP8266 SDK. The contents include preparations beforecompilation, SDK compilation and firmware download.•ESP-WROOM-02 DatasheetDescription: ESP-WROOM-02 is a SMD module that integrates ESP8266EX. Themodule has been adjusted to get the best RF performance.•ESP-WROOM-02D/ESP-WROOM-02U DatasheetDescription: ESP-WROOM-02D and ESP-WROOM-02U are ESP8266EX-basedmodules developed by Espressif. Compared with ESP-WROOM-02, the RFperformance of ESP-WROOM-02D and ESP-WROOM-02U are optimized.•ESP-WROOM-02 Reference DesignDescription: This zip package includes ESP-WROOM-02 hardware downloadingresources, manufacturing specifications, BOM and schematics.•ESP-WROOM-02D/ESP-WROOM-02U Reference DesignDescription: This zip package includes ESP-WROOM-02D and ESP-WROOM-02Umodule reference design resources, including schematics, PCB layout, gerber files andBOM lists.•ESP-WROOM-02 PCB Design and Module Placement GuideDescription: The ESP-WROOM-02 module is designed to be soldered to a host PCB.This document compares six different placements of the antenna on a host board andprovides notes on designing PCB.•ESP8266 Hardware ResourcesDescription: This zip package includes manufacturing specifications of the ESP8266board and the modules, manufacturing BOM and schematics.•ESP8266 AT Command ExamplesDescription: This document introduces some specific examples of using Espressif ATcommands, including single connection as a TCP Client, UDP transmission andtransparent transmission, and multiple connection as a TCP server.•ESP8266 AT Instruction SetDescription: This document provides lists of AT commands based onESP8266_NONOS_SDK, including user-defined AT commands, basic AT commands,Wi-Fi AT commands and TCP/IP-related AT commands. It also introduces thedownloading of AT firmware into flash.•TCP/UDP UART Passthrough Test DemonstrationDescription: This guide is intended to help users run a TCP & UDP passthrough test onthe ESP8266 IoT platform.•FAQA.2.Must-Have Resources•ESP8266 SDKsDescription: This website page provides links to the latest version of ESP8266 SDK andthe older ones.•ESP8266 ToolsDescription: This website page provides links to the ESP8266 flash download tools andESP8266 performance evaluation tools.•ESP8266 App•ESP8266 Certification and Test Guide•ESP8266 BBS•ESP8266 ResourcesDisclaimer and Copyright NoticeInformation in this document, including URL references, is subject to change without notice.THIS DOCUMENT IS PROVIDED AS IS WITH NO WARRANTIES WHATSOEVER,INCLUDING ANY WARRANTY OF MERCHANTABILITY , NON-INFRINGEMENT, FITNESS FOR ANY PARTICULAR PURPOSE, OR ANY WARRANTY OTHERWISE ARISING OUT OF ANY PROPOSAL, SPECIFICATION OR SAMPLE.All liability, including liability for infringement of any proprietary rights, relating to use of information in this document is disclaimed. No licenses express or implied, by estoppel or otherwise, to any intellectual property rights are granted herein.The Wi-Fi Alliance Member logo is a trademark of the Wi-Fi Alliance. The Bluetooth logo is a registered trademark of Bluetooth SIG.All trade names, trademarks and registered trademarks mentioned in this document are property of their respective owners, and are hereby acknowledged. Copyright © 2020 Espressif Inc. All rights reserved.Espressif IoT Team。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
It is recommended to perform a reset of the device after a self-test has been performed. If the reset cannot be performed,the following sequence must be kept to prevent unwanted interrupt generation: disable interrupts,change parameters of interrupts ,wait for at least 50ms,enable desired interrupts.
8.Disable advanced self test current (this must be done manually)
(高级自检执行Z通道信号路径功能和灵敏度的验证。 围绕霍尔传感器缠绕的片上线圈可以用校准电流在两个方向上驱动,以产生大约100uT的正或负场。)
Advanced self test is an option that is active in parallel to the other operation modes. The only difference is that during the active measurement phase,the coil current is enabled . The recommended usage of advanced self test is the following:
(此功能允许通过向传感器核心施加静电力而不是外部加速度来检查BMC150的加速度计部件功能。 通过实际偏转震动质量,可以测试传感器的整个信号路径。 激活自检导致加速度数据的静态偏移; 在活动自检期间施加到传感器的任何外部加速度或重力将在输出中被观察为加速度和自测试信号的叠加。。)
before the self test is enabled the g-range should be set to 8g. The self-test is activated individually for each axis by writing the proper value to the (0x32) self-test-axis bits ('01b' for x-axis,'10b' for y-axis ,'11b' for z-axis,'00b' to deactivate self-test). It is possible to control the direction of the deflection through bit (0x32) self-test-sign. The excitation occurs in negative (positive) direction if (0x32) self-test-sign='0b' ('1b'). The amplitude of the deflection has to be set high by writing (0x32) self-test-amp='1b'. After the self-test is enabled,the user should wait 50ms before interpreting the acceleration data.
(通过在芯片上生成信号来验证FlipCore信号路径。 这些通过信号路径进行处理,并且将测量结果与已知临界值进行比较。)
FlipCore (X and Y) bondwires to ASIC are checked for connectivity.
(检查FlipCore(X和Y)连线到ASIC的连接。)
FlipCore (X and Y) bondwires and MEMS are checked for shorts.
(检查FlipCore(X和Y)键合线和MEMS的短路。)
Hall sensor connectivity is checked for open and shorted connections.
4.4.1-Accelerometer self-test(加速器自我测试)
This feature permits to check the BMC150's accelerometer part functionality by applying electrostatic forces to the sensor core instead of external accelerations. By actually deflecting the seismic mass,the entire signal path of the sensor can be tested. Activating the self-test results in a static offset of the acceleration data; any external acceleration or gravitational force applied to the sensor during active self-test will be observed in the output as a superposition of both acceleration and self-test signal.
(建议在执行自检后执行器件的复位。 如果无法执行复位,则必须保持以下顺序以防止产生不必要的中断:禁止中断,更改中断参数,等待至少50ms,启用所需的中断。)
4.4.2-Magnetometer self-test(地磁计自检)
BMC150 supports two self-tests modes for the magnetometer part: Normal self-test and advanced self-test.
In order to ensure a proper interpretation of the sekf-test signal it is recommended to perform the self-test for both (positive and negative) directions and the to calculate the difference of the resulting acceleration values. Table 11 shows the minimum differences for each axis. The actually measured signal differences can be significantly larger.
(BMC150支持磁强计部分的两种自检模式:正常自检和高级自检。)
During normal self-test,the following verifications are performed:
(在正常的自检,下面进行验证:)
FlipCore signal path is verified by generating signals on-chip. These are processed through the signal path and the measuirement result is compared to known thresholds.
(检查霍尔传感器的连接是否断开和短路。)
Hall sensor signal path and hall sensor element offset are checked for overflow.
(检查霍尔传感器信号路径和霍尔传感器元件偏移是否溢出。)
To perform a self test,the sensor must first be put into sleep mode (OpMode ="11"). Self-test mode is then entered by setting the bit "Self test" (register 0X4C bit0) to "1".After performing self test, this bit is set back to "0". When self -test is successful,the corresponding self-test result bits are set to "1" ("X-Self-Test" register 0x42 bit0,"Y-Self-Test" regit" register 0x46 bit0). if self-test fails for an axis,the corresponding result bit returns "0".
(高级自检是与其他操作模式并行工作的选项。 唯一的区别是在有源测量阶段期间,线圈电流被使能。 高级自检的推荐用法如下:)
1.Set sleep mode
2.Disable X,Y axis
3.Set Z repetitions to desired level
4.Enable positive advanced self test current
(在启用自检前,g范围应设置为8g。 通过将适当的值写入(0x32)自测试轴位(x轴为'01b',y轴为'10b',z轴为'11b')为每个轴单独激活自检 ,'00b'禁用自检)。 可以通过位(0x32)自检信号来控制偏转的方向。 如果(0x32)自测试符号='0b'('1b'),则在负(正)方向上发生激励。 偏移的幅度必须通过写入(0x32)自测试amp ='1b'来设置得很高。 启用自检后,用户应在解释加速度数据前等待50ms。)