温度控制系统内容
温度控制系统
器
电信号Βιβλιοθήκη 非电信号二次仪表可处理信号
显示调节仪表
电信号
显 示 滤波、放大、 调 非线性校正 节 仪 表
温度
电压
流量
位移
在自动化控制系统中,二次仪表经常处于核心地位,因此对其进行认 真比较和精心选择,在安全上是必须的,在经济上是划算的。
执行器部分
为了能够对工业对象的参数进行自动控制(或报警),就必须由中间继电器、 可控硅、电磁阀等执行器执行对负载的调控。 执行器一般都工作于高电压、大电流、多动作的恶劣工作条件下,因此, 正确选择产品和降额使用是理所当然和十分经济的。
值时作出报警动作,而无论是上限、上上限、下限、下下限报警。 默认
的报警动作是报警输出继电器的常开触点闭合。
4.安装与接线
5.仪表面板布置和功能
6.使用指南
① 使用软件锁 ② 设置“控制”值 ③ 设置“误差修正”值 ④ 设置“报警”值 ⑤ 自整定功能 ⑥ 比例偏置功能 ⑦ 仪表若显示“ HH”,请检查传感器是否断线或输入超过了量程上
8.3 温度控制器的调节原理
8.3.1 二位式调节原理
二位式调节又称通断式控制,其工作原理是将测量值与设定值相比较,差值经 放大处理后,对执行器进行开(通)或关(断)的控制,主要由温度传感器、 温度控制器、执行器和电阻丝组成。
滞后时间:由于电炉炉体为保 温隔热材料制成的密闭箱体, 刚开始加热时,有一段时间炉 体温度基本保持不变,这一段 时间称之为滞后时间,其大小 通常取决于炉体结构,尤其是 炉体体积。
2.型号编制说明 例8-3 试说明型号为WG-5412温度控制器的主要性能。
解:(1)该仪表是智能型双三位显示调节仪; (2)调节方式为二位PID调节; (3)报警为上限报警; (4)输入信号采用热电阻温度传感器; (5)输出信号为继电器触点输出。
温度控制系统的发展概况

时滞温度控制系统是一个具有重要应用价值的系统,其运行过程中存在明显 的滞后效应。滞后效应的产生主要是由于物质传输、热量传递和系统自身动力等 方面的原因,使得控制系统对温度变化的响应变得迟缓。为了有效提高时滞温度 控制系统的性能,研究者们不断探索新的控制方法。
随着科学技术的不断发展,时滞温度控制系统的研究已经取得了一定的成果。 然而,现有的控制方法仍然存在诸多不足,如控制精度不高、稳定性差、不能有 效处理时滞等问题。因此,探索更为有效的控制方法显得尤为重要。
本次演示对时滞温度控制系统控制方法的研究进行了综述,总结了现有方法 的优缺点,并针对存在的问题提出了一种新的自适应控制方法。通过实验设计和 仿真技术验证了该方法的有效性。未来的研究方向可以包括探索更加智能和适应 复杂环境变化的
控制算法,为实际工业应用提供更加可靠和精准的温度控制方案。
感谢观看
总之,温度控制系统的发展概况表明,随着技术的不断进步和创新,温度控 制系统的应用领域越来越广泛,其基本构成更加完善,发展前景广阔。相信未来 温度控制系统会朝着更加智能化、网络化、高精度和高效率的方向迈进,为推动 现代工业和科技的发展做出更大的贡献。
参考内容
随着科技的不断发展,智能化成为各行各业的主要趋势。温度控制作为日常 生活和工业生产中的重要环节,如何实现智能化以提高效率、节约能源以及提高 生产质量,已成为业界的焦点。本次演示将介绍一种智能温度控制系统,包括其 设计、应用及未来发展前景。
此外,温度控制系统在建筑、食品、医药等各个行业中也有着广泛的应用。 例如,在建筑行业中,温度控制系统能够保证室内恒温,提高居住舒适度;在食 品行业中,温度控制系统能够实现对食品的恒温干燥,保证食品的口感和营养价 值;在医药行业
中,温度控制系统能够确保药品生产过程中的温度稳定,提高药品的质量和 安全性。
温度控制系统工作原理

温度控制系统工作原理温度控制系统工作原理温度控制系统是一种用于控制温度的自动化设备,它能够根据输入信号对环境温度进行调节,以实现期望的空间温度。
温度控制系统具有自动控制、节能、节约、方便等特点,可用于家庭、厂房、机房和其他场所的温度控制。
下面我们就一起来了解一下温度控制系统的工作原理及控制系统的结构与功能。
一、温度控制系统的工作原理1、环境温度检测:温度控制系统首先必须要到采集环境温度,一般使用温度传感器来采集环境温度值,经过温度控制系统的控制器处理,将采集到的温度值发送给控制系统以实现温度控制系统的控制。
2、控制输出:根据温度控制系统的设定值和环境温度值,温度控制系统的控制器能够做出正确的控制决策,控制系统控制器就会根据其决策通过开关来控制负载,实现对负载的控制,使得环境温度满足控制系统的设定值。
3、温度控制系统调节:温度控制系统的调节是持续进行的,当环境温度大于或小于控制系统设定的温度值时,控制器就会持续进行控制,以维持环境温度等于或接近控制系统的设定值。
二、温度控制系统的结构与功能1、温度控制系统的主要组成部分:温度控制系统由温度传感器、控制器、显示装置、开关、负载等部分组成。
2、温度传感器:温度传感器的作用是采集环境温度,然后将采集到的温度值发送给控制器。
3、控制器:控制器的功能是根据温度控制系统的设定值和环境温度值,做出控制输出决策,控制负载,以实现温度控制的目的。
4、显示装置:显示装置的作用是实时显示环境温度值和控制系统的设定值,以便于温度控制系统的调整和监控。
5、开关:温度控制系统的开关的作用是根据控制器的控制输出决策控制负载,以实现温度控制的目的。
6、负载:负载的作用是根据控制器的决策控制负载,以实现温度控制系统控制的目的。
以上就是温度控制系统的工作原理及控制系统的结构与功能介绍,温度控制系统的优点在于它具有自动控制、节能、节约、方便等特点,可用于家庭、厂房、机房和其他场所的温度控制,是大家非常理想的温度控制设备。
单片机温度控制系统
单片机温度控制系统简介单片机温度控制系统是一种基于单片机的自动温度调节系统,它能够根据预设的温度范围,自动控制外部设备以调节温度。
本文档将介绍单片机温度控制系统的工作原理、硬件架构和软件设计。
工作原理单片机温度控制系统通过温度传感器获取当前环境的温度值,并与预设的温度范围进行比较。
如果当前温度低于预设值,则系统会启动加热设备;如果当前温度高于预设值,则系统会启动冷却设备。
通过不断的检测和调节,系统能够实现对环境温度的精确控制。
硬件架构单片机温度控制系统的硬件架构主要包括以下几个部分:单片机模块单片机模块是整个系统的核心部分,它负责接收温度传感器的数据、进行数据处理和控制外部设备。
常用的单片机有Arduino、Raspberry Pi等。
温度传感器温度传感器用于获取环境的温度值,常用的传感器有NTC 热敏电阻、DS18B20数字温度传感器等。
传感器将获取的温度值转换成数字信号,通过模拟输入引脚或数字引脚传递给单片机。
加热设备和冷却设备加热设备和冷却设备根据温度的情况进行相应的操作,以调节环境温度。
加热设备可以是电热丝、电热器等,冷却设备可以是风扇、制冷装置等。
单片机通过控制输出引脚的电平来控制加热设备和冷却设备的启动与停止。
软件设计单片机温度控制系统的软件设计可以分为以下几个模块:温度采集模块温度采集模块负责读取温度传感器的数据,并进行相应的处理。
通过模拟输入引脚或数字引脚接收传感器的输出信号,并将其转换成温度值。
温度比较模块温度比较模块将采集到的温度值与预设的温度范围进行比较。
如果当前温度小于最低温度,系统将启动加热设备;如果当前温度大于最高温度,系统将启动冷却设备;如果当前温度在最低温度和最高温度之间,则系统将关闭所有设备。
控制模块控制模块根据温度比较模块的结果来控制加热设备和冷却设备的启停。
通过控制输出引脚的电平,控制加热设备和冷却设备的开关状态。
显示模块显示模块用于显示当前的温度值和系统状态。
温度控制系统实验报告
温度控制系统实验报告温度控制系统实验报告一、引言温度控制系统作为现代自动化领域的重要组成部分,广泛应用于工业生产、家电和环境控制等领域。
本实验旨在通过搭建一个简单的温度控制系统,了解其工作原理和性能特点。
二、实验目的1. 了解温度控制系统的基本原理;2. 掌握温度传感器的使用方法;3. 熟悉PID控制算法的应用;4. 分析温度控制系统的稳定性和响应速度。
三、实验装置本实验使用的温度控制系统由以下组件组成:1. 温度传感器:用于测量环境温度,常见的有热敏电阻和热电偶等;2. 控制器:根据温度传感器的反馈信号,进行温度控制;3. 加热器:根据控制器的输出信号,调节加热功率;4. 冷却装置:用于降低环境温度,以实现温度控制。
四、实验步骤1. 搭建温度控制系统:将温度传感器与控制器、加热器和冷却装置连接起来,确保各组件正常工作。
2. 设置控制器参数:根据实际需求,设置控制器的比例、积分和微分参数,以实现稳定的温度控制。
3. 测量环境温度:使用温度传感器测量环境温度,并将测量结果输入控制器。
4. 控制温度:根据控制器输出的控制信号,调节加热器和冷却装置的工作状态,使环境温度保持在设定值附近。
5. 记录数据:记录实验过程中的环境温度、控制器输出信号和加热器/冷却装置的工作状态等数据。
五、实验结果与分析通过实验数据的记录和分析,我们可以得出以下结论:1. 温度控制系统的稳定性:根据控制器的调节算法,系统能够在设定值附近维持稳定的温度。
但是,由于传感器的精度、控制器参数的选择等因素,系统可能存在一定的温度波动。
2. 温度控制系统的响应速度:根据实验数据,我们可以计算出系统的响应时间和超调量等参数,以评估系统的控制性能。
3. 温度传感器的准确性:通过与已知准确度的温度计进行对比,我们可以评估温度传感器的准确性和误差范围。
六、实验总结本实验通过搭建温度控制系统,探究了其工作原理和性能特点。
通过实验数据的分析,我们对温度控制系统的稳定性、响应速度和传感器准确性有了更深入的了解。
温度控制系统设计
温度控制系统设计概述温度控制系统是一种广泛应用于工业生产、实验室环境以及家庭生活中的系统。
它通过感知环境温度并根据设定的温度范围来控制加热或制冷设备,以维持特定温度水平。
本文将介绍温度控制系统的设计原理、硬件组成和软件实现。
设计原理温度控制系统的设计基于负反馈原理,即通过对环境温度进行实时监测,并将监测结果与目标温度进行比较,从而确定加热或制冷设备的控制量。
当环境温度偏离目标温度时,控制系统会调节加热或制冷设备的工作状态,使环境温度逐渐趋向目标温度。
硬件组成1. 传感器传感器是温度控制系统的核心组成部分,用于感知环境温度。
常见的温度传感器包括热敏电阻(Thermistor)、温度传感器芯片(Temperature Sensor Chip)和红外温度传感器(Infrared Temperature Sensor)等。
传感器将环境温度转换为电信号,并输出给微控制器进行处理。
微控制器是温度控制系统的中央处理单元,用于接收传感器输入的温度信号,并进行数据处理和控制逻辑的执行。
常见的微控制器包括Arduino、Raspberry Pi 和STM32等。
微控制器可以通过GPIO(General Purpose Input/Output)口实现与其他硬件模块的连接。
3. 控制器控制器是温度控制系统的核心部件,用于根据目标温度和实际温度之间的差异来调节加热或制冷设备的运行状态。
常见的控制器包括PID控制器(Proportional-Integral-Derivative Controller)和模糊控制器(Fuzzy Controller)等。
控制器通过电压或电流输出信号,控制加热或制冷设备的开关状态。
4. 加热或制冷设备加热或制冷设备是温度控制系统的输出组件,用于增加或降低环境温度。
根据具体应用需求,常见的加热设备包括电炉、电热丝和电热器等;常见的制冷设备包括压缩机和热泵等。
软件实现温度控制系统的软件实现主要涉及以下几个方面:1. 温度采集软件需要通过与传感器的接口读取环境温度值。
温度控制系统原理

温度控制系统原理一、温度控制系统概述温度控制系统是一种用于控制和调节温度的技术系统,广泛应用于工业生产、科研实验、家电家居等领域。
二、温度感知技术温度感知技术是温度控制系统的基础,用于实时监测当前温度值。
常见的温度感知技术包括热电阻、热敏电阻、铂电阻等,通过测量材料的电阻随温度变化的特性,可以得到温度值的反馈。
三、温度控制算法温度控制系统的关键是设计合理的控制算法,以实现温度的精确控制和稳定调节。
常用的温度控制算法有比例控制、比例-积分控制、比例-积分-微分控制等。
控制算法根据温度偏差与设定值的关系,调节控制执行器的输出信号,使温度保持在设定值附近。
四、温度调节执行器温度调节执行器是温度控制系统中的关键组成部分,用于根据控制算法的输出信号,调节恒温器、加热器、制冷器等设备。
温度调节执行器可通过控制阀门、电磁阀、电器元件等方式,实现温度的精确调节和控制。
五、温度控制系统的应用温度控制系统广泛应用于各个领域。
在工业生产中,温度控制系统用于控制炉温、温度梯度,保证工业生产的质量和效率。
在科研实验中,温度控制系统用于模拟实验环境、控制反应温度,以便于研究人员的实验操作和观察。
在家电家居中,温度控制系统用于家庭空调、恒温器、温度报警器等,提供舒适的居住环境和保障家庭安全。
六、温度控制系统的优势与发展趋势温度控制系统具有精准度高、稳定性好、可靠性强等优势。
随着科技的发展,温度控制系统的智能化程度不断提高,采用了先进的控制算法和感知技术,实现更加精确的温度控制和调节。
未来,温度控制系统有望在能源节约、环境保护等方面发挥更大的作用,为人们的生活和工作带来便利与舒适。
温度控制系统的设计与实现
温度控制系统的设计与实现汇报人:2023-12-26•引言•温度控制系统基础知识•温度控制系统设计目录•温度控制系统实现•温度控制系统应用与优化01引言目的和背景研究温度控制系统的设计和实现方法,以满足特定应用场景的需求。
随着工业自动化和智能制造的快速发展,温度控制系统的性能和稳定性对于产品质量、生产效率和能源消耗等方面具有重要影响。
03高效、节能的温度控制系统有助于降低生产成本、减少能源浪费,并提高企业的竞争力。
01温度是工业生产过程中最常见的参数之一,对产品的质量和性能具有关键作用。
02温度控制系统的稳定性、准确性和可靠性直接关系到生产过程的稳定性和产品质量。
温度控制系统的重要性02温度控制系统基础知识温度控制系统的性能指标包括控制精度、响应速度、稳定性和可靠性等,这些指标直接影响着系统的性能和效果。
温度控制原理是利用温度传感器检测当前温度,并将该信号传输到控制器。
控制器根据预设的温度值与实际温度值的差异,通过调节加热元件的功率来控制温度。
温度控制系统通常由温度传感器、控制器和加热元件组成,其中温度传感器负责检测温度,控制器负责控制加热元件的开关和功率,加热元件则是实现温度升高的设备。
温度控制原理温度传感器是温度控制系统中非常重要的组成部分,其工作原理是将温度信号转换为电信号或数字信号,以便控制器能够接收和处理。
常见的温度传感器有热敏电阻、热电偶、集成温度传感器等,它们具有不同的特点和适用范围。
选择合适的温度传感器对于温度控制系统的性能和稳定性至关重要。
温度传感器的工作原理加热元件的工作原理加热元件是温度控制系统中实现温度升高的设备,其工作原理是通过电流或电阻加热产生热量,从而升高环境温度。
常见的加热元件有电热丝、红外线灯等,它们具有不同的特点和适用范围。
选择合适的加热元件对于温度控制系统的性能和安全性至关重要。
控制算法是温度控制系统的核心部分,其作用是根据预设的温度值和实际温度值的差异,计算出加热元件的功率调节量,以实现温度的精确控制。
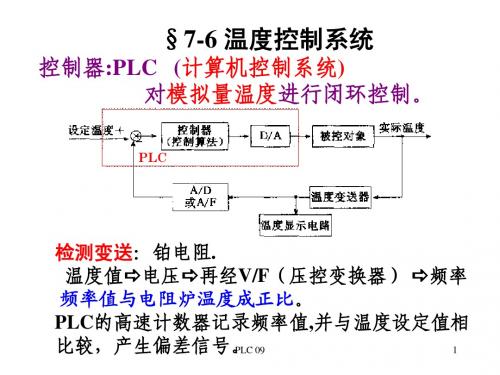
温度控制系统

温度液位控制系统系统功能1.系统由水泵从‘供水池’向‘加热水箱’中注入冷水。
水泵出水口安装有压力变送器。
当出水阀门开度变化时,水泵出水口的压力也会随之变化,压力变送器将信号变送至PLC,信号经运算后通过反馈控制调节变送器,变送器控制电机转速大小,使出水口的水压不变。
由流量、流速、截面积、水压之间的关系式:Q=μ*A*(2*P/ρ)^0.5式中Q——流量,m^/S;μ——流量系数,与阀门或管子的形状有关;0.6~0.65;A——面积,m^2;P——通过阀门前后的压力差,单位Pa;ρ——流体的密度,Kg/m^3;由上述关系知,当出水口压力不变时,压差P为定值,流量Q只和截面积即阀门开度A有关,从而方便水箱进水量的控制。
同时水箱进出口安装有流量变送器,实时检测水流量,并与设定值比较,得出的偏差控制阀门开度,达到进水量无差控制。
2.水箱内部安装‘液位’变送器,检测水箱的液位高度。
当进水流量不变且适当时,通过调节出水口阀门开度,能够使得水箱的液位保持在恒定高度。
通过PID控制,当系统有扰动时(进水流量变化时),系统能够在一定的时间内通过PID调节使系统重新恢复稳定状态。
3.系统通过‘加热器’将水箱中的冷水加热,并在水箱内部和水箱出水口分别安装温度变送器,以水箱出口温度为主控制变量,保证出口温度,同时引入水箱内部温度为辅助控制变量,以稳定主变量,极大限度的消除扰动对系统主变量的干扰。
通过这种串级控制,使水箱出口温度可控。
系统要求1.注入水箱的水流量Q可控。
2.水箱的液位H可控。
3.水箱出口水的温度T可控。
4.系统可通过手/自动调节各个阀门。
注:系统稳定时注入水箱的水的流量等于水箱出口的水流量。
Q、H、T的值可通过系统设置。
系统PID参数可调,以便理解PID控制算法。
系统控制原理系统由两个闭环控制系统组成。
1.水箱注水量与液位高度闭环控制。
V2单容水箱是一个自衡系统,水箱‘出口’水流量与‘水压’和出水口阀门V2开度有关,而水压与水位的高度H又有一定的比例关系。
温度控制系统
其中: 调节器第n 次采样输出值; 其中:u (n) :调节器第 次采样输出值;
e(n) :第 n 次采样的偏差值; 次采样的偏差值;
e(n − 1) :第 (n-1)次采样的偏差值; 次采样的偏差值; 次采样的偏差值
PLC 09 3
K p :比例系数; 比例系数; 比例系数 Ts K i = K p :积分系数;(教材式 7- 2 有误) 积分系数;( ;(教材式 有误) Ti Td K d = K p :微分系数。 微分系数。 Ts
1 u (t ) = K p [e(t ) + Ti de(t ) ∫0 e(t )dt + Td dt ]
t
2
PLC 09
PID算法的传递函数 算法的传递函数
G ( s) =
U ( s) 1 = K p [1 + + Td s ] E ( s) Ti s
2.数字PID控制算法 .数字 控制算法
位置式算法: 位置式算法 设采样周期为T 离散化连续PID算法 设采样周期为 s,离散化连续 算法 求和代替积分,差分代替微分) (求和代替积分,差分代替微分) Ts n Td u (n) = K p {e(n) + ∑ e( j ) + [e(n) − e( n − 1)]} Ti j = 0 Ts = K p e(n) + K i ∑ e( j ) + K d ∆e(n)
0.8 y (kT − T ) + 0.2 y (kT )
表明: 表明:在滤波结果中起主要作用的是 y(kT−T)
是前一时刻的滤波值而不是当前时刻的采样值。 前一时刻的滤波值而不是当前时刻的采样值。 而不是当前时刻的采样值
y 例如: 相差1倍 例如: (kT − T ) = 0.5, y ( kT ) = 1, 相差 倍; y (kT ) = 0.8 y (kT − T ) + 0.2 y (kT ) = 0.6
温度控制系统 (2)
温度控制系统1. 简介温度控制系统是一种用于监测和调节环境温度的系统。
它通常由传感器、控制器和执行器等组成,用于实时测量温度并根据设定值进行自动调节。
这种系统广泛应用于各种领域,包括工业生产、建筑物自动化、空调系统等。
2. 系统组成温度控制系统主要由以下组件组成:2.1 传感器传感器是温度控制系统的核心组件之一。
它们用于监测环境温度,并将测量值传送给控制器。
常见的温度传感器类型包括热电偶、热敏电阻和红外线传感器等。
2.2 控制器控制器是温度控制系统的决策中心。
它接收传感器的温度数据并与设定值进行比较,根据差异调节执行器的工作状态以实现温度控制。
控制器通常由微处理器或微控制器实现,具备计算能力和逻辑控制功能。
2.3 执行器执行器是控制器的输出设备,通过控制环境参数来调节温度。
常见的执行器包括加热器和冷却器。
加热器可以增加环境温度,而冷却器可以降低环境温度。
2.4 操作界面操作界面用于人机交互,通过控制界面上的按钮、旋钮、显示器等设备,用户可以设定温度值、查看实时温度、调整系统参数等。
3. 工作原理温度控制系统的工作原理可以简述为以下几个步骤:1.传感器测量环境温度并将数据传送给控制器。
2.控制器将传感器数据与设定值进行比较,计算出温度差异。
3.控制器根据温度差异调节执行器工作状态。
如果当前温度低于设定值,则控制器会开启加热器;反之,如果当前温度高于设定值,则控制器会开启冷却器。
4.控制器不断监测温度,并根据测量值调整执行器的工作状态,以保持环境温度在设定范围内。
4. 应用领域温度控制系统在各个领域都有广泛的应用,下面几个常见的应用领域:4.1 工业生产在工业生产中,温度控制系统用于控制生产过程中的温度,以保证产品质量和工艺稳定性。
例如,铸造过程、烘烤过程和化学反应过程中都需要控制温度。
4.2 建筑物自动化在建筑物自动化中,温度控制系统用于空调系统的温度调节。
通过感知室内温度并与设定温度进行比较,系统可以自动调节空调设备,提供舒适的室内环境。
温度自动控制系统(1)
温度自动控制系统简介温度自动控制系统是一种利用现代控制技术对环境温度进行自动调节的系统。
它通过感知环境温度,并根据设定的温度范围自动调节控制器来实现温度的自动控制。
构成温度自动控制系统主要由以下几个部分构成:1. 温度感知器温度感知器是一种能够感知环境温度的传感器。
常见的温度感知器有热敏电阻、热电偶和红外线温度传感器等。
它们能够将温度转化为电信号,供控制器进行处理。
2. 控制器控制器是温度自动控制系统的核心组件,负责接收来自温度感知器的温度信号,并根据设定的温度范围进行判断和控制。
控制器通常采用微处理器或微控制器实现,它可以根据信号进行计算和判断,并控制执行器的工作状态。
3. 执行器执行器是根据控制器的指令来执行相应动作的设备。
在温度自动控制系统中,执行器通常是一种能够调节环境温度的设备,例如电加热器、冷却风扇或空调系统等。
控制器会根据当前温度与设定温度的差值,发送信号给执行器,以调整环境温度。
4. 电源电源是为整个温度自动控制系统提供电能的设备。
温度自动控制系统通常使用直流电源,以保证稳定可靠的供电。
工作原理温度自动控制系统的工作原理可以简要描述如下:1.温度感知器感知环境温度,并将温度信息转化为电信号。
2.控制器从温度感知器接收到温度信号,并判断当前温度是否在设定的温度范围内。
3.如果当前温度在设定的温度范围内,控制器不做任何动作。
4.如果当前温度超过设定的温度范围上限,控制器会发送信号给执行器,使其启动冷却设备,以降低温度。
5.如果当前温度低于设定的温度范围下限,控制器会发送信号给执行器,使其启动加热设备,以提高温度。
6.控制器会定期检测温度,并根据需要调整执行器的工作状态,以保持环境温度在设定范围内。
应用领域温度自动控制系统在许多领域都有广泛应用,下面是几个常见的应用领域:1. 家庭空调系统家庭空调系统是最常见的应用之一。
温度自动控制系统可以根据家庭成员的需求,自动调节空调的工作状态,以保持室内温度在舒适范围内。
温度控制系统工作原理

温度控制系统工作原理
温度控制系统工作原理
温度控制系统是一种常用的控制系统,用于控制和维护特定温度范围内的工作环境。
它可以根据温度变化来调节发电机和冷却系统的运行,以维持所需的温度范围。
温度控制系统由不同的模块组成,主要包括传感器、控制器、发电机和冷却系统等,下面来简要介绍它们的工作原理。
传感器:传感器是温度控制系统的核心组件,它能够检测出温度变化并将变化转换成标准的电信号,然后发送给控制器。
控制器:控制器是一种电子器件,用来控制发电机和冷却系统的运行。
它根据传感器检测到的温度变化,调节发电机和冷却系统的工作,以达到维护所需温度范围的目的。
发电机:发电机是用来生成热能的电器,它根据控制器的指令调节工作电流,以达到温度控制的目的。
冷却系统:冷却系统是温度控制系统的另一个组成部分,它负责把多余的热能排到外部,以保持所需的温度范围。
可以采用风冷、水冷、液冷或其他形式的冷却系统。
综上所述,温度控制系统工作原理主要就是:传感器检测温度变化,发送给控制器;控制器根据温度变化调节发电机和冷却系统的运行,以维护所需的温度范围,最终实现温度控制。
- 1 -。
仪表实验报告

实验一温度控制系统(一)一、实验目的1、了解温度控制系统的组成环节和各环节的作用。
2、观察比例、积分、微分控制规律的作用,并比较其余差及稳定性。
3、观察放大倍数P、积分时间I、微分时间dt对控制系统(闭环特性)控制品质的影响。
二、温度控制系统的组成电动温度控制系统是过程控制系统中常见的一种,其作用是通过一套自动控制装置,见图1,使炉温自动维持在给定值。
图1 温度控制系统炉温的变化由热电偶测量,并通过电动温度变送器转化为标准信号4~20mA直流电流信号,传送到电子电位差计进行记录,同时传送给电动控制器,控制器按偏差的大小、方向,通过预定控制规律的运算后,输出4~20mA直流电流信号给可控硅电压调整器,通过控制可控硅的导通角,以调节加到电炉(电烙铁)电热元件上的交流电压,消除由于干扰产生的炉温变化,稳定炉温,实现自动控制。
三、实验内容1、在相同扰动作用下,作出两条不同比例度的纯比例温度控制动态曲线,综合分析比例度对控制系统的影响。
2、在相同扰动作用下,作出两条相同比例度不同积分时间的比例积分温度控制动态曲线,分析积分时间对控制系统的影响3、作出比例积分微分温度控制动态曲线,综合分析微分时间对控制系统的影响。
4、观察小比例度时的温度两只动态曲线,综合分析原因。
四、实验步骤1、观察系统各环节的结构、型号、电路的连接,熟悉可控硅电压调整器和电动控制器上各开关、旋钮的作用。
2、控制系统闭环特性的测定:在以下实验中使用的P1 ,P2 ,I1,I2 ,dt1,Cr1的具体数值由各套实验装置具体提供。
(1)考察比例作用将δ置于某值P1 ,积分时间置最大(I=999),微分时间dt置于提供值不变,Cr1置于7,将干扰开关从“短”切向“干扰”,产生一个阶跃干扰(此时为反向干扰),同时在记录仪的记录线上作一记号,以记录阶跃干扰加入的时刻,观察并记录在纯比例作用下达到稳定的时间及余差大小。
(2)考察积分作用保持P=P1不变,置I=I1,同时在记录仪的记录线上作一记号,以记录积分作用加入的时刻,注意观察积分作用如何消除余差,直到过程基本稳定。
温度控制系统

温度控制系统
简介
温度控制系统是一种用于控制环境温度的智能设备。
它可以自动监测和调整室
内或室外的温度,以保持恒定的温度水平。
温度控制系统可以提高生活质量,提供舒适的生活环境。
工作原理
温度控制系统通过传感器检测环境温度,并根据设定的温度范围进行调节。
当
环境温度高于设定值时,系统会自动启动制冷设备降低温度;反之,当环境温度低于设定值时,系统会启动加热设备升高温度。
控制系统通过控制风扇、暖气、空调等设备来实现温度调节。
应用领域
温度控制系统广泛应用于家庭、办公室、工业等领域。
在家庭中,温度控制系
统可以保持室内的舒适温度,提高生活质量;在办公室和工业场所,温度控制系统可以提高工作效率,保障生产质量。
优势
1.节能环保:温度控制系统可以根据实际需要自动调节温度,节省能源,
降低能耗,减少对环境的影响。
2.提高舒适度:温度控制系统可以及时调节环境温度,提供舒适的生活
和工作环境。
3.自动化管理:温度控制系统可以自动监测和调节温度,减少人工干预,
提高工作效率。
发展趋势
随着科技的进步和人们对生活品质的追求,温度控制系统将会越来越智能化和
便捷化。
未来,温度控制系统可能会与其他智能设备进行联接,实现更加智能化的智能家居系统,为人们提供更加舒适便捷的生活体验。
结语
温度控制系统是一种重要的环境控制设备,可以提高生活质量,提供舒适的生
活环境。
随着科技的发展,温度控制系统将不断进步和完善,为人们的生活带来更多便利和舒适。
温度控制系统 毕业论文

温度控制系统毕业论文温度控制系统引言温度控制系统是现代工业和生活中广泛应用的一种自动控制系统。
它通过感知环境温度,并根据预设的目标温度进行调节,以维持系统内的温度在一个合适的范围内。
本文将探讨温度控制系统的原理、应用和未来发展趋势。
一、温度控制系统的原理温度控制系统的核心原理是负反馈控制。
它通过传感器感知环境温度,并将这一信息反馈给控制器。
控制器根据预设的目标温度与实际温度之间的差异,调节执行器来实现温度的稳定控制。
这种负反馈控制的原理可以确保系统在不同环境条件下能够自动调节温度,以满足用户的需求。
二、温度控制系统的应用温度控制系统广泛应用于各个行业和领域。
在工业生产中,温度控制系统可以用于控制炉温、烘干设备、冷却设备等,以确保产品质量和生产效率。
在医疗领域,温度控制系统可以用于保持手术室、实验室和药品储存等环境的恒温,以确保医疗设备和药品的安全性。
在家庭生活中,温度控制系统可以用于调节空调、暖气和热水器等设备,以提供舒适的居住环境。
三、温度控制系统的优势温度控制系统具有许多优势。
首先,它可以提高工作效率和生产质量。
通过精确控制温度,可以确保工业生产过程中的稳定性和一致性,从而提高产品的质量和生产效率。
其次,温度控制系统可以节约能源和降低成本。
通过合理调节温度,可以避免能源的浪费和设备的过度运转,从而降低能源消耗和运营成本。
此外,温度控制系统还可以提供舒适的生活环境,改善人们的生活品质。
四、温度控制系统的发展趋势随着科技的不断进步,温度控制系统也在不断发展。
首先,传感器技术的改进使得温度控制系统能够更加精确地感知环境温度,从而提高控制的准确性和稳定性。
其次,智能化和自动化技术的应用使得温度控制系统更加智能化和便捷化。
例如,通过与智能手机的连接,用户可以远程监控和调节温度,提高用户体验。
此外,与其他系统的集成也是未来发展的趋势之一。
例如,将温度控制系统与能源管理系统相结合,可以实现能源的综合管理和优化利用。
pid温度控制系统课程设计
pid温度控制系统课程设计一、教学目标本课程的教学目标是使学生掌握PID温度控制系统的基本原理、组成及应用,培养学生运用PID控制理论分析和解决实际问题的能力。
具体目标如下:1.知识目标:–了解PID控制器的原理、结构和参数调整方法;–掌握PID控制系统的稳定性、快速性和精确性评价指标;–熟悉PID控制器在不同工业过程中的应用。
2.技能目标:–能够运用PID控制理论分析和解决实际控制系统问题;–能够运用编程软件(如C、Python等)实现PID控制器;–具备对PID控制系统进行调试和优化能力。
3.情感态度价值观目标:–培养学生动手实践能力和团队合作精神;–培养学生对自动控制领域的兴趣,提高其学术素养;–使学生认识到PID控制系统在现代工业中的重要地位,增强其责任感。
二、教学内容根据课程目标,教学内容主要包括以下三个方面:1.PID控制器原理:介绍PID控制器的基本概念、结构和工作原理,使学生了解PID控制器在控制系统中的作用。
2.PID控制系统分析:讲解PID控制系统的稳定性、快速性和精确性评价指标,培养学生运用这些指标分析和评价PID控制系统的性能。
3.PID控制器应用:介绍PID控制器在不同工业过程中的应用,如温度控制、流量控制、液位控制等,使学生学会运用PID控制理论解决实际问题。
三、教学方法为实现课程目标,本课程采用以下教学方法:1.讲授法:讲解PID控制器原理、分析和应用,使学生掌握基本概念和理论知识。
2.案例分析法:分析实际工业过程中的PID控制系统,培养学生运用PID控制理论解决实际问题。
3.实验法:学生进行PID控制系统实验,使学生动手实践,加深对PID控制理论的理解。
4.讨论法:学生分组讨论,培养学生的团队合作精神和沟通能力。
四、教学资源为实现课程目标,本课程需准备以下教学资源:1.教材:选用《自动控制原理》等权威教材,为学生提供系统、科学的理论知识学习。
2.参考书:提供相关领域的经典著作和论文,拓展学生的知识视野。
汽轮机的温度控制说明书
汽轮机的温度控制说明书说明书本文档主要介绍汽轮机的温度控制系统,以及如何正确操作该系统以确保汽轮机的高效稳定运行。
一、系统概述汽轮机温度控制系统主要由温度传感器、控制器和阀门等部件组成。
温度传感器通过不间断的测量汽轮机内部的温度,并输出相应的电信号,控制器对这些信号进行处理,最后调节阀门控制汽轮机的进气温度。
二、系统操作在操作汽轮机时,必须先将温度控制系统开启并设置相应的参数。
具体地,需要进行以下操作:1.打开控制器电源,启动温度控制系统。
2.根据当前的天气和使用条件,调节进气温度设置值。
一般情况下,进气温度应该在1000℃以下。
3.根据气象数据和其他因素,调整减负负荷的设定值,以确保汽轮机在高负荷工作时保持稳定。
4.根据进汽量、汽轮机转速和负载等因素,进行实时监控和控制,以保持汽轮机的运行温度在安全稳定的范围内。
5.在温度异常或其他问题发生时,及时检修和维护温度控制系统,确保系统的正常运行。
三、注意事项1.在操作温度控制系统时,要严格按照操作指南进行操作。
不得随意更改系统的设置和参数。
2.对于温度控制系统的故障和异常,不得私自进行维修和调整,必须由专业技术人员进行处理。
3.在进行温度控制系统维护和修理时,必须先停止汽轮机的运行,并安全关闭相应的开关,以免发生意外。
四、总结汽轮机温度控制系统是保障汽轮机高效稳定运行的重要组成部分。
只有正确操作和维护该系统,才能确保汽轮机的长期稳定运行,提高发电效率,降低生产成本。
请各位操作人员认真阅读本说明书,并按照指南进行操作,以确保汽轮机温度控制系统的正常运行。
温度控制系统的工作原理

温度控制系统的工作原理温度控制系统是一种用于监测和调节环境中的温度的自动化系统。
它通常由传感器、控制器和执行器组成。
下面将详细介绍温度控制系统的工作原理。
1. 传感器:温度控制系统的传感器通常是温度传感器。
温度传感器可以通过测量物体或环境的温度来将其转化为电信号。
常见的温度传感器有热电偶、热敏电阻和红外线传感器等。
温度传感器感知环境中的温度变化,并将其转化为电信号。
2. 控制器:控制器是温度控制系统的核心部分。
它接收从温度传感器传来的温度信号,并根据预设的温度值进行处理。
控制器根据温度信号来判断当前温度是否符合设定的温度范围。
如果温度过高或过低,控制器将发出信号从而启动执行器来调节温度。
3. 执行器:执行器是温度控制系统的输出部分。
它根据控制器的指令执行相应的操作,以调节环境的温度。
常见的执行器有加热器和冷却器。
当温度过低时,执行器将启动加热器,通过加热来提高环境的温度。
当温度过高时,执行器将启动冷却器,通过降低环境的温度来调节温度。
4. 反馈回路:温度控制系统中的反馈回路是保证系统稳定性和精度的重要组成部分。
它通过监测环境中的温度变化,并将实际温度值反馈给控制器。
控制器通过与设定温度值进行比较,并根据反馈信息进行相应的调整。
反馈回路可以实时地纠正温度控制系统中的误差,使得系统能够更加准确地控制温度。
总的来说,温度控制系统的工作原理是通过传感器感知环境中的温度,并将其转化为电信号。
控制器接收到温度信号后,根据预设的温度范围进行判断并进行相应的控制。
执行器根据控制器的指令来调节环境的温度。
反馈回路可以实时地纠正系统中的误差,以提高系统的稳定性和精度。
这样,温度控制系统可以自动地保持环境的温度在设定范围内。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1.序言1.1 概述现代信息技术的三大基础是信息采集控制(即温控器技术)、信息传输(通信技术)和信息处理(计算机技术)。
温控器属于信息技术的前沿尖端产品,尤其是温控器被广泛用于工农业生产、科学研究和生活等领域,数量日渐上升。
近百年来,温控器的发展大致经历了以下二个阶段; (1)模拟、集成温度控制器;(2)智能数码温控器。
目前,国际上新型温控器正从模拟式向数字式、由集成化向智能化、网络化的方向发展。
在20世纪90年代中期最早推出的智能温控器,采用的是8位A/D转换器,其测温精度较低,分辨力只能达到2℃。
目前,国外已相继推出多种高精度、高分辨力的智能温度传感器,所用的是9~12位A/D转换器,分辨力一般可达0.5~0.0625℃。
为了提高多通道智能温控器的转换速率,也有的芯片采用高速逐次逼近式A/D转换器。
本设计的温度控制器是以单片机为核心的。
单片微型计算机称为单片机,它在一片芯片上集成了中央处理器、存储器、定时器/计数器和各种输入输出设备等接口部件。
采用单片机对温度进行控制不仅具有控制方便、简单和灵活性大等优点,而且可以大幅度提高被控温度的技术指标,从而能够大大的提高产品的质量和数量。
1.2 课题分析单片机控制系统由微机和工农业生产对象两部分组成,其中包括硬件电路和软件程序,整个控制系统是通过接口将计算机和生产过程中产生的温度联系起来实现计算机对生产过程中的数据处理和控制。
本文介绍了MCS—51单片机对温度控制系统硬件接口和软件设计的基本思想。
包括单片机系统的程序设计、输入输出接口设计、温度控制电路的设计及键盘显示电路的设计。
1.3 设计思路此外整个控制系统可分为硬件电路设计和软件程序设计两大部分。
可分别对它们进行分析设计。
当确定好自己的方案后,就分模块进行软件和硬件的设计与调试。
当个模块都调试完毕后,最后将所有模块组合在一起进行总调,直到达到理想的效果为止。
2. 硬件电路设计描述2.1 系统的基本组成本系统是由核心处理器模块、温度采集模块、A/D 转换模块、及控制执行模块等组成。
采用用80C51单片机作为控制核心,1206LCD 显示,PCF8951作为模数转换器,四个独立按键,以及温度控制模块。
2.2 系统框图如下:2.3 温度控制模块原理图:2.4 系统原理图:3. 软件设计流程4 程序清单SDA EQU P1.3 ;I2C数据线SCL EQU P1.4 ;I2C时钟线DQ EQU P1.5 ;3-WIR数据线CLK EQU P1.6 ;3-WIR时钟线NRST EQU P1.7 ;3-WIR复位线SLAW EQU 70H ;SAA1064写命令,地址为70H,最低位为0表示写SLAR EQU 71H ;SAA1064读命令,地址为71H,最低位为1表示读TH EQU 34 ;最高极限温度TL EQU 32 ;最低极限温度TZ EQU 33DSEG AT 20HNUMBYT: DS 1 ;向SAA1064I2C传送字节数N存放单元BUFTC: DS 2 ;SAA1064发送命令缓冲区BUFTD: DS 4 ;向SAA1064发送数据缓冲区BUFRD: DS 6 ;从SAA1064接收缓冲区DAT1: DS 1 ;温度值存储单元POINT: DS 1 ;小数点后温度值的存储单元CSEG AT 0000HJMP MAIN1ORG 0003HLJMP KEYORG 0100HMAIN1: MOV SP,#60H ;已用参数R0,R1,R2,R5,R6,R7,C,F0 MOV PSW,#00HMOV 50H,#33MOV 51H,#25MOV 52H,#29MAIN0: SETB EX0SETB EA MOV 45H,#2 ;写入判断条件MOV 33H,#1 ;写入循环条件MOV 44H,#1MOV A,38HCJNE A,#00H,AA1MOV 38H,#01HRETIAA1:CLR IE0CLR P1.0 LCALL BEGIN ;复位命令MOV A,#0CH ;写配置寄存器命令LCALL W8BITMOV A,#0AH ;连续转换模式数据LCALL W8BITLCALL BEGIN ;结束上一次通讯,开始下一次通讯MOV A,#01H ;写TH寄存器命令LCALL W8BITMOV A,#THMOV A,50H ;写最高温度值MOV POINT,#0LCALL W9BITLCALL BEGIN ;结束上一次通讯,开始下一次通讯MOV A,#02H ;写TL寄存器命令LCALL W8BITMOV A,#TLMOV A,51H;写最低温度值MOV POINT,#0LCALL W9BITLCALL BEGIN ;结束上一次通讯,开始下一次通讯MOV A,#0EEH ;开始温度转换命令LCALL W8BITCLR NRST ;结束上一次通讯LCALL DELAY2 ;延时1sRENU: LCALL BEGIN ;复位命令MOV A,#0AAH ;写读温度值命令LCALL W8BITLCALL R9BIT ;读9位温度值MOV 57H,R0 ;加如的判断温度和设定之间的关系,并跳到相应的子程序MOV 46H,AMOV A,50HDEC AMOV B,46H SUBB A,BJB ACC.7,S5 JMP S6S5:LJMP KBSS6:MOV A,52HADD A,#2MOV B,46HSUBB A,BJB ACC.7,S7 JMP S8S7:LJMP QJKSS8:MOV B,51H MOV A,46HSUBB A,BJB ACC.7,S11JMP S10S11:LJMP KBJS10:MOV A,52HSUBB A,#2MOV B,AMOV A,46HSUBB A,BJB ACC.7,S9JMP S12S9:LJMP KJS12: MOV R0,57H ;判断结束5MOV A,46H ;AAAAAAAAAAAAAAAAAAAAAAAAAAAAA MOV DAT1,A ;将1-8位温度值送DAT保存CLR NRST ;结束一次读温度LCALL STORE ;将温度值转换为可显示的形式MOV NUMBYT,#6 ;显示温度值LCALL WRNBYTSJMP RENUSTORE: MOV R0,#BUFTC ;用到参数DAT,POINTMOV A,#00H ;SAA1064子地址MOV @R0,AINC R0MOV A,#47H ;SAA1064控制字节MOV @R0,AMOV R0,#BUFTDMOV A,DAT1 ;判断温度值是正是负JB ACC.7,NEGMOV A,#00H ;正温度的符号位不显示,数码管不亮MOV @R0,AAJMP NSTNEG: CPL A ;将负数转换成相应的正数MOV B,AMOV A,POINTCPL ACLR ACC.1INC AMOV C,ACC.1XCH A,BADDC A,#0MOV DAT1,A ;把负温度值1-8位变正存储MOV POINT,B ;把负温度值第9位变正存储MOV A,#40H ;负号显示MOV @R0,ANST: INC R0 ;显示缓冲区地址加1MOV A,DAT1 ;取温度值MOV B,#10 ;除法后寄存器ACC是十位数,寄存器B是个位数DIV ABMOV DPTR,#TAB0 ;将十位和个位的数转换为数码管的字形码值MOVC A,@A+DPTRMOV @R0,A ;存十位数INC R0 ;显示缓冲区地址加1MOV A,BMOVC A,@A+DPTRSETB ACC.7MOV @R0,A ;存个位数和小数点INC R0 ;显示缓冲区地址加1MOV A,POINT ;取小数点后的值JB ACC.0,FLOAT ;如果有小数转FLOATMOV A,#3FH ;将0的字形码值存缓冲区MOV @R0,AAJMP EFLOAT: MOV A,#6DH ;将5的字形码值存缓冲区MOV @R0,AE: RETTAB0: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07H,7FH,6FH ;0~9段码值表;3-WIR初始化子程序BEGIN: CLR NRST ;复位线置0CALL DELAY1 ;延时20mS,这是为了写EEPROM时有足够长的等待时间SETB CLK ;置3-WIR时钟为高SETB NRST ;复位线置1RET;向3-WIR数据线上发送9位温度值,第9位数据在POINT中,1-8位数据在ACC中W9BIT: CLR CLK ;置3-WIR时钟为低SETB DQ ;置3-WIR数据线为1,即默认第9位数据为1MOV R0,POINT ;从POINT读出第9位数据送R0CJNE R0,#0,W1 ;第9位数据不为0转W1CLR DQ ;置3-WIR数据线为0,即第9位数据为0W1: SETB CLK ;置3-WIR时钟为高,发送数据;下一段程序也可单独作为写8位数据使用W8BIT: MOV R0,#08H ;置R0为8,为写8位数据建立计数器初值W2: CLR CLK ;置3-WIR时钟为低SETB DQ ;置3-WIR数据线为1,即默认数据为1RRC A ;右移将被发送数据放入进位CJC W3 ;进位为1(即发送数据为1)转W3CLR DQ ;置3-WIR数据线为0,即发送数据为0W3: SETB CLK ;置3-WIR时钟为高,发送数据DJNZ R0,W2 ;8位数据没送完转W2RET;读9位温度值。
第9位存到POINT,第1-8位存到累加器ACCR9BIT: SETB DQ ;置3-WIR数据为高,为接收数据做准备CLR CLK ;置3-WIR时钟为低MOV POINT,#1 ;默认小数点后的数据为1MOV C,DQ ;传送小数点后的数据到进位CJC RR1 ;进位为1转RR1MOV POINT,#0 ;将0存入POINTRR1: SETB CLK ;置3-WIR时钟为高;下一段程序也可单独作为写8位数据使用R8BIT: MOV R0,#08H ;置R0为8,为读8位数据建立计数器初值RR2: CLR CLK ;置3-WIR时钟为低MOV C,DQ ;传送读出的数据到进位CRRC A ;通过右移将读出的数放入ACCSETB CLK ;置3-WIR时钟为高DJNZ R0,RR2 ;8位数据没读完转RR2RET;模拟I2C总线发送N个字节数据,N存放在NUMBYT中;数据区的第一个字节为从器件的地址SUBADR;数据区的第二个字节是控制寄存器字节COM WRNBYT: LCALL STAR0 ;发出启动传输命令MOV A,#SLAW ;发出发送数据命令LCALL WRBYTLCALL CACK ;调用应答子程序JB F0,WRNBYT ;如果错误应答,转WRNBYT重新开始MOV R1,#BUFTC ;放发送数据区的首地址在R1中WRDAT: MOV A,@R1 ;从数据区中取出1个字节发送LCALL WRBYTLCALL CACK ;调用应答子程序JB F0,WRNBYT ;如果错误应答,转WRNBYT重新开始INC R1 ;数据区地址加1DJNZ NUMBYT,WRDAT ;发送没有结束转WRDAT继续发送LCALL STOP ;发送结束,发出停止命令RET;模拟I2C总线接收N个字节数据,N存在NUMBYT RDNBYT: LCALL STAR0 ;发出启动传输命令MOV A,#SLAR ;发出接收数据命令LCALL WRBYTLCALL CACK ;调用应答子程序JB F0,RDNBYT ;如果错误应答,转RDNBYT重新开始RDN: MOV R1,#BUFRD ;放接收数据区的首地址在R1中RDN1: LCALL RDBYT ;接收1个字符MOV @R1,A ;将收到的字符放进缓冲区DJNZ NUMBYT,ACK ;接收没结束,转ACKLCALL MNACK ;接收结束,发送非应答信号LCALL STOP ;发送停止信号RETACK: LCALL MACK ;发送应答信号INC R1 ;缓冲区地址加1SJMP RDN1;向SDA线上发送一个数据字节子程序,使用了R0 WRBYT: MOV R0,#08H ;8位数据长度送R0中WLP: RLC A ;发送数据左移,使发送位送入进位C中JC WRE1 ;判断发送"1"还是"0",发送"1"转WRE1SJMP WRE0 ;发送"0"转WRE0WLP1: DJNZ R0,WLP ;8位是否发送完,未完转WLP RET ;8位发送完,返回;发送"1"程序段WRE1: SETB SDA ;置数据信号SDA为高SETB SCL ;置时钟信号SCL为高NOP ;NOP为满足I2C协议所需的等待时间NOPCLR SCL ;使时钟信号SCL为低CLR SDA ;使数据信号SDA为低SJMP WLP1;发送"0"程序段WRE0: CLR SDA ;使数据信号SDA为低SETB SCL ;置时钟信号SCL为高NOP ;NOP为满足I2C协议所需的等待时间NOPCLR SCL ;使时钟信号SCL为低SJMP WLP1;从SDA线上读取一个数据字节子程序,放入R2中RDBYT: MOV R0,#08H ;8位数据长度送入R0RLP: SETB SDA ;置SDA为输入方式SETB SCL ;置时钟信号SCL为高,使SDA上数据有效CLR C ;默认读数为0,置进位C=0JNB SDA,RD0 ;读数为0,转RD0SETB C ;读数为1,置进位C=1RD0: MOV A,R2 ;将读到的数(在进位C中),通过循环左移放到R2中RLC AMOV R2,ACLR SCLDJNZ R0,RLP ;没有读完8位数据转RLPRET ;读完8位数据返回;START信号子程序STAR0: SETB SCL ;置时钟信号SCL为高SETB SDA ;置数据信号SDA为高NOP ;NOP为满足I2C协议所需的等待时间NOPCLR SDA ;使数据信号SDA为低NOP ;NOP为满足I2C协议所需的等待时间NOPCLR SCL ;使时钟信号SCL为低RET;主机发送应答位子程序MACK: CLR SDA ;使数据信号SDA为低SETB SCL ;置时钟信号SCL为高NOP ;NOP为满足I2C协议所需的等待时间NOPCLR SCL ;使时钟信号SCL为低SETB SDA ;置数据信号SDA为高RET;主机发送非应答位子程序MNACK: SETB SDA ;置数据信号SDA为高SETB SCL ;置时钟信号SCL为高NOP ;NOP为满足I2C协议所需的等待时间NOPCLR SCL ;使时钟信号SCL为低CLR SDA ;使数据信号SDA为低RET;应答位检测子程序,F0=0表示收到了正常应答;F0=1表示收到非正常应答CACK: SETB SDA ;置数据信号SDA为高,以便接收数据SETB SCL ;置时钟信号SCL为高CLR F0 ;默认为正常应答JNB SDA,CEND ;正常应答转CENDSETB F0 ;置错误应答标志CEND: CLR SCL ;使时钟信号SCL为低NOP ;NOP为满足I2C协议所需的等待时间NOPRET;STOP信号子程序STOP: CLR SDA ;使数据信号SDA为低SETB SCL ;置时钟信号SCL为高NOP ;NOP为满足I2C协议所需的等待时间NOPSETB SDA ;置数据信号SDA为高NOP ;NOP为满足I2C协议所需的等待时间NOPCLR SCL ;使时钟信号SCL为低RET;延时20ms,使用了R6、R7DELAY1: MOV R7,#250L1: MOV R6,#20L2: DJNZ R6,L2DJNZ R7,L1RET;延时1s子程序,使用了R5、R6、R7 DELAY2: MOV R5,#10L3: MOV R6,#100L4: MOV R7,#250L5: DJNZ R7,L5DJNZ R6,L4DJNZ R5,L3RETKEY:DAT EQU 20HDATS EQU 25HPA EQU 8000HPB EQU 8001HPCO EQU 8002HPCTL EQU 8003HMOV 38H,#00HMOV R7,#4MOV R2,#0MOV DAT,#00HMOV 22H,#00HMOV 23H,#00HMOV 24H,#00HMOV DPTR,#PCTLMOV A,#88HMOVX @DPTR,AMOV DPTR,#PBMOV A,#0FHMOVX @DPTR,AMOV DPTR,#PAMOV A,#00HMOVX @DPTR,ASTAR: MOV DPTR,#PCOMOV A,#0F0HMOVX @DPTR,AKB1: MOV DPTR,#PCOMOVX A,@DPTRCJNE A,#0F0H,KB2LJMP SCANKB2: MOV R2,#1MOV B,#0FEHKB22: MOV DPTR,#PCOMOV A,BMOVX @DPTR,AMOV DPTR,#PCOMOVX A,@DPTRANL A,#0F0HCJNE A,#0F0H,KB3 MOV A,BRL AMOV B,AJMP KB22KB3: ANL B,#0FHORL B,AMOV R3,#0MOV DPTR,#TABKB4: MOV A,R3MOVC A,@A+DPTRJNZ KB5JMP KB1KB5: CJNE A,B,CONLCALL DELYMOV DPTR,#TAB1MOV A,R3MOVC A,@A+DPTRMOV 30H,R3 ;将偏移地址保存 MOV 34H,AMOV A,33HCJNE A,#00H,M2JMP M0M2:LJMP Y0M0: MOV A,41HE1: SUBB A,#77HJZ S1JMP E2S1:LJMP DTH ;aaaaaaaaaaaaaaE2: MOV A,41HSUBB A,#7CHJZ S2JMP E3S2:LJMP DTLE3: MOV A,41HCJNE A,#58H,X0S3:LJMP DTZX0: MOV A,34H ;第二个数据是写到哪里a MOV DAT,AMOV DPTR,#PCOMOV A,#0F0HMOVX @DPTR,AWAIT: MOVX A,@DPTRCJNE A,#0F0H,WAITCALL DELYLJMP STARJMP SCANCON: INC R3JMP KB4SCAN: CJNE R2,#1,SKIPMOV R2,#0CJNE R7,#0,NEXT MOV R7,#4 NEXT: DEC R7SKIP: CJNE R7,#3,NEXT1 MOV A,#04HMOV DATS,DATLCALL PROMOV 24H,DATLJMP X3NEXT1:CJNE R7,#2,NEXT2 MOV A,#04HMOV DATS,DATLCALL PROMOV 23H,DATMOV A,#08HMOV DATS,24HLCALL PROLJMP X3NEXT2:CJNE R7,#1,NEXT3 MOV A,#04HMOV DATS,DAT LCALL PROMOV 22H,DAT MOV A,#08H MOV DATS,23H LCALL PROMOV A,#01H MOV DATS,24H LCALL PROLJMP X3NEXT3:MOV A,#04H MOV DATS,DAT LCALL PROMOV A,#08H MOV DATS,22H LCALL PROMOV A,#01H MOV DATS,23H LCALL PROMOV A,#02H MOV DATS,24HLCALL PROLJMP X3X3: MOV A,33HCJNE A,#1,G5 MOV A,44HCJNE A,#0,G6 LJMP MAIN0G6: MOV A,45HCJNE A,#0,G5 LJMP MAIN0G5: LJMP STAR DELY: MOV R0,#10H DELY0: MOV R1,#250 DELY1: DJNZ R1,DELY1 DJNZ R0,DELY0 RETPRO: MOV DPTR,#PB MOVX @DPTR,A MOV DPTR,#PA MOV A,DATSMOVX @DPTR,AMOV R5,#100DJNZ R5,$RETY0: MOV A,34HSUBB A,#77H ;加入的各个子程序aaa JZ S0MOV A,34HSUBB A,#7CHJZ S0MOV A,34HCJNE A,#58H,S00LJMP S0;aaaaaaaaaaaaaaaS00:MOV A,34HSUBB A,#5EHJZ H1JMP G1H1:LJMP QBG1: MOV A,34HSUBB A,#79H;aaaaaaaaaaaaJZ H2LJMP G2H2:LJMP QSG2: MOV A,34HCJNE A,#71H,G3H3:LJMP KSG3: MOV A,34HLJMP X0S0: MOV A,33HDEC AMOV 33H,AMOV 41H,34H;aaaaaaaaaaaaa LJMP X0DZ:LJMP S12 ;aaaaaaaaQB: SETB P3.4LJMP MAIN0KS: SETB P1.0LJMP MAIN0QS: CLR P1.0;aaaaaaaaaaaaLJMP MAIN0X1:MOV A,44HDEC AMOV 44H,ALJMP X0KBJ: CLR P3.4CLR P1.0CLR P1.1LJMP S12;aaaaaaaaaaaaa KJ: CLR P1.1SETB P3.4CLR P1.0LJMP S12KBS: CLR P3.4SETB P1.0SETB P1.1LJMP S12QJKS: SETB P1.0SETB P3.4SETB P1.1;aaaaaaaaaaaaLJMP S12DTH: MOV DPTR,#TAB2MOV A,30HMOVC A,@A+DPTR ;aaaaaa MOV 31H,AMOV A,45HDEC AMOV 45H,A;aaaaaaaaaaaa JZ S4MOV 32H,31HLJMP X0S4: MOV A,32HMOV B,#0AHMUL ABMOV B,31HADD A,B;aaaaaaaaaaMOV 50H,AMOV 33H,#1LJMP X0DTL: MOV DPTR,#TAB2MOV A,30HMOVC A,@A+DPTRMOV 31H,AMOV A,45HDEC AMOV 45H,AJZ G9 ;aaaaaaaaaaaaaaa MOV 32H,31HLJMP X0G9: MOV A,32HMOV B,#10MUL ABMOV B,31HADD A,BMOV 51H,AMOV 33H,#1;aaaaaaaaaaaaa LJMP X0DTZ: MOV DPTR,#TAB2MOV A,30HMOVC A,@A+DPTRMOV 31H,AMOV A,45HDEC A ;aaaaaaaaaaaaaaa MOV 45H,AJZ G4MOV 32H,31HLJMP X0G4: MOV A,32H;aaaaaaaaaaaaaaMOV B,#19MUL ABMOV B,31HADD A,BMOV 52H,AMOV 33H,#1LJMP X0 ;子程序结束aaaaaaaaaaaTAB: DB 0EEH,0DEH,0BEH,7EH,0EDH,0DDH,0BDH,7DHDB 0EBH,0DBH,0BBH,7BH,0E7H,0D7H,0B7H,77H,00H TAB1: DB 3FH,06H,5BH,4FH,66H,6DH,7DH,07HDB 7FH,6FH,77H,7CH,58H,5EH,79H,71HTAB2:DB 00H,01H,02H,03H,04H,05H,06H,07HDB 08H,09H,0AH,0BH,0CH,0DH,0EH,0FHEND5 仿真结果参考文献【1】、徐玮. C51单片机高效入门. [M]机械工业出版社1999.8【2】兰吉昌. 单片机C51完全学习手册. [M]化学工业出版社2001.2 【3】黄立宏,李莉娅.一种PID的温度控制系统设计[J].现代机械.2009.1.【4】关平,曲颖,刘红等.可实现的基于MCS—51单片机的恒温控制系统的设计[J].自动化技术与应用.2008.10.【5】乔元勋,曹衍龙。