毕业设计悬挂控制系统
机械设计毕业设计
机械设计毕业设计
机械设计是现代工程领域的重要组成部分,为了提高学生的设计能力和解决问题的能力,我选择了一项与机械结构设计相关的毕业设计题目——"悬浮车悬挂系统设计与优化"。
该毕业设计的主要内容是设计一种能够使汽车行驶更平稳、减少震动的悬挂系统,通过对悬挂系统的结构和参数进行优化,提高车辆的悬浮性能。
首先,我对汽车悬挂系统的工作原理和组成部分进行了研究。
悬挂系统主要由悬挂弹簧、减振器和悬挂支架等部分组成。
在车辆行驶过程中,悬挂弹簧可以吸收道路不平度带来的冲击力,减振器可以控制车身的姿态和减少车身的摇晃。
接下来,我进行了悬挂系统的结构设计。
为了提高悬浮性能,我选择了气压悬挂系统作为设计方案,通过调整气压来改变悬挂系统的刚度,使得悬挂系统能够适应不同的路面情况。
同时,我还对悬挂支架的材料和结构进行了优化设计,以提高悬挂系统的强度和稳定性。
然后,我进行了悬挂系统的参数设计和优化。
通过对悬挂弹簧的刚度、减振器的阻尼系数、气压的调整范围等参数进行合理的选择和优化,使得悬挂系统在不同的路面情况下能够提供最佳的悬浮性能。
最后,我进行了悬挂系统的仿真分析。
通过建立悬挂系统的数学模型,利用计算机软件对悬挂系统进行仿真分析,得出了悬
挂系统在不同行驶速度和路面条件下的动力学响应和载荷分布等参数,验证了设计方案的合理性和优化效果。
通过这次毕业设计,我对机械设计的理论知识和实践能力有了更深入的了解和掌握。
我相信通过这样的设计与优化过程,我将能够更好地应用所学知识解决实际工程问题,并为未来的工作做好充分准备。
悬架 毕业设计
悬架毕业设计悬挂毕业设计:提升驾驶体验的关键技术引言:在现代汽车工业中,悬挂系统是车辆性能和乘坐舒适性的重要组成部分。
它不仅能够提供稳定的操控性能,还可以减少车辆在行驶过程中的震动和颠簸感。
因此,悬挂系统的设计和优化对于提升驾驶体验至关重要。
本文将探讨悬挂系统的设计原理、优化方法以及未来发展方向。
一、悬挂系统的设计原理悬挂系统的设计原理基于减震和支撑两个主要目标。
减震是指通过悬挂系统来吸收道路不平面带来的冲击和震动,以保持车辆的稳定性。
支撑则是指悬挂系统提供的支撑力,使车辆保持合适的接地面积,提供足够的附着力。
常见的悬挂系统包括独立悬挂、扭力梁悬挂和多连杆悬挂等。
二、悬挂系统的优化方法为了提升驾驶体验,悬挂系统的优化是必不可少的。
一种常见的优化方法是通过调整悬挂系统的刚度来改变车辆的操控性能。
较高的刚度可以提供更好的操控性,但会降低乘坐舒适性。
相反,较低的刚度可以提供更好的乘坐舒适性,但会牺牲操控性能。
因此,设计师需要根据用户需求和车辆用途来平衡刚度。
另一种优化方法是采用主动悬挂系统。
主动悬挂系统通过传感器和控制器来感知车辆的运动状态,并根据需要调整悬挂系统的刚度和行程。
这种系统可以根据不同的驾驶条件和路况来实时调整悬挂系统,提供更好的操控性能和乘坐舒适性。
三、悬挂系统的未来发展方向随着科技的不断进步,悬挂系统也在不断演进。
未来的悬挂系统可能会采用更先进的材料和技术来提升性能。
例如,碳纤维材料可以提供更高的刚度和更轻的重量,从而提高车辆的操控性能和燃油经济性。
此外,电动悬挂系统也是未来的发展趋势之一。
电动悬挂系统可以实现更精确的调节和更灵活的悬挂调整,进一步提升驾驶体验。
结论:悬挂系统作为汽车工业中的关键技术之一,对于提升驾驶体验起着重要的作用。
通过优化悬挂系统的设计和采用先进的技术,可以实现更好的操控性能和乘坐舒适性。
未来,随着科技的不断发展,悬挂系统将会继续进化,为驾驶者带来更加优越的驾驶体验。
悬挂运动控制系统的设计
悬挂运动控制系统的设计本毕业设计课题是属于教师拟定性课题,主要是研究基于单片机的对步进电机的有效控制。
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件,每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速...<P>本毕业设计课题是属于教师拟定性课题,主要是研究基于单片机的对步进电机的有效控制。
步进电机是一种能将数字输入脉冲转换成旋转或直线增量运动的电磁执行元件,每输入一个脉冲电机转轴步进一个步距角增量。
电机总的回转角与输入脉冲数成正比例,相应的转速取决于输入脉冲频率。
<BR> 步进电机是机电一体化产品中关键部件之一,通常被用作定位控制和定速控制。
步进电机惯量低、定位精度高、无累积误差、控制简单等特点。
广泛应用于机电一体化产品中,如:数控机床、包装机械、计算机外围设备、复印机、传真机等。
<BR><BR> Abstract<BR>This article mainly elaborated has been hanging the movement control system merit, introduced was hanging the movement control system function, the principle and the design process. Is hanging the movement control system is one of in control engineering domain important applications, its main target is to is controlled the object the movement condition, including path, speed and position implementation check. The movement control system compares with other control systems, has the system model simply, the check algorithm is unitary, also not complex characteristic and so on non-linearity and coupling situation. Also is precisely because the movement control system can implement to the path, the running rate, the pointing accuracy as well as the repetition precision accuracy control requirement, has the broad application foreground in each category of control engineering, therefore the movement control system has at present become in the check study application domain very much significant the research direction. Through the monolithic integrated circuit to stepping monitor check, implemented the motor-driven to cause the object at on the board which inclined the movement, The control section is the SST89E52 monolithic microcomputer which SST Corporation produces primarily, with when the 1602LCD liquid crystal screen and according to turned has implemented with the user interactive, through the keyboard entry different control command, the liquid-crystal display was allowed to display the setting value and the run thecoordinates. The electrical machinery control section used LM324N four to transport puts and is connected the electronic primary device voluntarily to develop the 42BYG205 stepping monitor actuation electric circuit to implement the electrical machinery accuracy control. The algorithm partially for will suit the monolithic integrated circuit system to operate carries on optimizes many times, will reduce the microprocessor the operand. Has completed the object voluntarily the movement and according to the different setup path movement. <p class='Uux450'></p> <BR>Key words Magneto; 1602LCD; LM324N; Drive circuit <pclass='Uux450'></p> </P><P> 选择步进电机时,首先要保证步进电机的输出功率大于负载所需的功率。
悬挂运动控制统设计方案
悬挂运动控制系统研制报告摘要:悬挂运动控制系统能够用两个电机来实现控制一个点做轨迹运动。
系统能够通过键盘设定运动点的坐标参数,能够在限定的时间内画出自行设定的运动的轨迹,也可实现画圆形轨迹的运动。
其系统是由单片机AT89S51实现中心控制的,通过单片机强大的逻辑计算能力实现两电机转速的控制,以达到运动点的正常运动,利用它端口资源的优势以实现键盘的控制和显示的输出,以达到人机交流。
关键词:悬挂运动步进电机单片机1. 系统设计1.1 设计要求设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。
在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为800CM×100CM。
物体的形状不限,质量大于100克。
物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。
板上标有间距为1CM的浅色坐标线(颜色不同于画笔颜色)左下角为直角坐标原点。
基本要求:1.控制系统能够通过键盘或者其他方式任意设定坐标点参数;2.控制物体在80CM×100CM的范围内作自行设定的运动,运动轨迹长度不小于100 CM,物体在运动时能够在板上画出运动轨迹,限300秒内完成;3.控制物体作圆心可任意设定、直径为50CM的圆周运动,限300秒内完成;4.物体从左下角坐标原点出发,在150秒内到达设定的一个坐标点(两点间直线距离不小于40CM )。
1.2 总体设计方案1.2.1 设计思路题目要求设计一个悬挂运动控制系统,能够用两个步进电机控制一点做轨迹运动。
所以系统设计中必须有一个可以计算与控制的控制系统, 它可以计算出两个步进电机各自的转速方向和转速并且有一个可以驱动电机转动的驱动电路,以及人机交流的键盘输入和显示电路,供给系统能量的电源电路。
其系统的基本组成方框图如图1-1所示。
1.2.2 方案论证与比较1. 控制系统的设计方案的论证与选择方案一:采用单片机为控制中心的控制系统。
悬架毕业设计
悬架毕业设计
悬架系统是汽车中非常重要的部分,它直接影响到汽车的行驶稳定性、操控性和驾驶舒适性。
因此,在汽车工程专业的毕业设计中,悬架系统的设计是一个非常重要的课题。
本文将介绍一个基于模糊控制的汽车悬架系统的毕业设计。
该设计的目标是提高汽车的行驶稳定性和乘坐舒适度,通过模糊控制来实现悬架系统的智能调节。
首先,需要对汽车悬架系统的工作原理和主要组成部分进行了解和分析。
悬架系统主要由弹簧、减震器和悬架杆等部件组成,通过对这些部件的调节来实现悬架系统的控制。
其次,需要采集相关的实验数据,包括汽车的加速度、车速和悬架系统的位移等参数。
通过这些数据的分析,可以得到汽车在不同路况下的悬架系统参数的变化规律,为模糊控制算法的设计提供依据。
然后,需要设计悬架系统的模糊控制算法。
模糊控制是指通过建立模糊逻辑规则,将输入变量映射到输出变量,从而实现对系统的控制。
在悬架系统的设计中,可以将汽车的加速度和车速作为输入变量,将悬架系统的位移作为输出变量,通过模糊控制算法来调节悬架系统的参数,以提高汽车的行驶稳定性和乘坐舒适度。
最后,需要进行实验验证。
通过悬架系统的调节,对悬架系统的性能进行评估,比较模糊控制算法和传统控制算法的效果差
异,验证模糊控制算法的有效性和优越性。
通过以上步骤,可以完成汽车悬架系统的毕业设计,并取得令人满意的结果。
本设计实现了汽车悬架系统的智能调节,提高了汽车的行驶稳定性和乘坐舒适度,具有一定的应用价值和意义。
同时,本设计也为进一步研究和优化汽车悬架系统提供了参考和基础。
悬挂系统课程设计方案模板
一、课程基本信息1. 课程名称:汽车悬挂系统2. 课程类别:汽车工程专业基础课程3. 学时安排:理论课24学时,实验课8学时4. 教学对象:汽车工程及相关专业本科生5. 教学目标:使学生掌握汽车悬挂系统的基本原理、结构、类型、性能及其在设计中的应用,提高学生对汽车悬挂系统的分析、设计和评价能力。
二、课程内容1. 悬挂系统概述- 悬挂系统的定义和作用- 悬挂系统的分类和特点- 悬挂系统在汽车中的作用2. 悬挂系统结构- 弹簧- 悬架- 横向稳定杆- 连接杆件3. 悬挂系统类型- 非独立悬挂系统- 独立悬挂系统- 多连杆悬挂系统- 麦弗逊悬挂系统4. 悬挂系统性能分析- 车辆平顺性- 车辆稳定性- 车辆操纵稳定性- 车辆通过性5. 悬挂系统设计- 设计原则和注意事项- 悬挂系统参数选择- 悬挂系统优化设计6. 悬挂系统实验- 悬挂系统性能测试- 悬挂系统参数调整三、教学方法1. 讲授法:系统讲解汽车悬挂系统的基本理论、结构、类型和性能。
2. 案例分析法:通过实际案例,让学生了解悬挂系统在设计、应用中的问题和解决方法。
3. 讨论法:组织学生就悬挂系统相关话题进行讨论,培养学生的分析问题和解决问题的能力。
4. 实验教学法:通过悬挂系统实验,让学生亲自动手,掌握悬挂系统的性能测试和参数调整方法。
四、教学手段1. 多媒体课件:制作多媒体课件,丰富教学内容,提高教学效果。
2. 教材和参考书:选用合适的教材和参考书,为学生提供学习资料。
3. 实验设备:提供实验设备,让学生在实验中掌握悬挂系统的性能测试和参数调整方法。
五、教学评价1. 期末考试:考察学生对汽车悬挂系统基本理论、结构、类型和性能的掌握程度。
2. 实验报告:评价学生在实验过程中的操作技能和数据分析能力。
3. 平时成绩:根据学生的课堂表现、作业完成情况等进行综合评价。
六、课程实施与调整1. 根据学生实际情况,调整教学内容和教学方法。
2. 定期检查教学效果,及时调整教学计划。
汽车的悬挂系统毕业设计

汽车的悬挂系统毕业设计一、绪论汽车悬挂系统是整个汽车的重要部件之一,负责承受车身重量、减少不平路面对驾驶员和车辆的震动,提高汽车行驶的稳定性、安全性和舒适性。
车辆的悬挂系统类型有很多,目前主要分为以下几类:钢板弹簧悬挂、气垫悬挂、液压悬挂、空气悬挂、线性电机悬挂等。
在这些悬挂系统中,钢板弹簧悬挂由于结构简单、可靠性高、维修成本低、使用寿命长等特点,被广泛应用于商务车、轿车等各类汽车上。
在本次毕业设计中,我们将探讨钢板弹簧悬挂的结构特点、工作原理、设计计算等相关知识,并通过模型搭建、仿真计算等方法进行验证、分析,最终设计出一款性能优良的悬挂系统。
二、钢板弹簧悬挂结构特点分析钢板弹簧悬挂是一种由多片钢板组成的簇形弹簧,它通过卡在轮轴上的轴承、钢板的可弯曲性和自身的复原力来支撑车身,减少汽车在行驶过程中因路面不平造成的震动。
相较于其它悬挂系统,钢板弹簧悬挂具有以下几个特点:1. 结构简单:钢板弹簧悬挂由多片钢板叠加而成,整个结构非常简单,易于制造和维护。
2. 承载能力强:钢板弹簧悬挂通过增加钢板片数和钢板厚度等措施,可以增加其承受重量的能力。
3. 悬挂稳定性高:由于钢板弹簧悬挂的结构比较坚实,所以可以在不平路面行驶中稳定地支撑车身,并保证悬挂系统的稳定性。
4. 维修成本低:钢板弹簧悬挂的零部件比较常见,不易损坏,维修时只需更换磨损部位即可,换件成本相对较低。
三、钢板弹簧悬挂工作原理钢板弹簧悬挂的工作原理比较简单,它是通过利用钢板的可弯曲性和复原力来减少汽车在行驶过程中因路面不平造成的震动。
在汽车行驶时,钢板弹簧会受到垂直于车轴的力量,使得钢板发生弯曲,并在车子运行过程中产生吸震作用。
四、钢板弹簧悬挂的设计计算钢板弹簧悬挂的设计需进行一系列的计算,主要包括钢板弹簧的承载能力计算、选型计算、弹簧常数计算等。
这些计算都是为了保证悬挂系统可以很好地支撑车辆的重量,同时还要考虑到汽车的舒适性、安全性等方面的要求。
悬架毕业设计

悬架毕业设计悬挂毕业设计悬挂系统是汽车工程中的重要组成部分,它不仅影响着车辆的操控性能和乘坐舒适性,还直接关系到驾驶安全。
因此,对于汽车工程专业的学生来说,悬挂系统的设计是一项重要的毕业设计课题。
在悬挂系统的设计中,首先需要了解悬挂系统的基本原理和组成部分。
悬挂系统主要由弹簧、减震器和悬挂臂等组成。
弹簧的作用是支撑车身重量,减震器则起到缓冲和控制车身姿态的作用。
悬挂臂则连接车轮和车身,传递悬挂力和转向力。
在悬挂系统的设计中,考虑到车辆的操控性能和乘坐舒适性是非常重要的。
悬挂系统的刚度和减震器的调校直接影响着车辆的悬挂动力学性能。
如果悬挂系统的刚度过高,会导致车辆在行驶过程中过于颠簸,影响乘坐舒适性;而刚度过低则会导致车辆在转向时出现过度倾斜,影响操控性能。
因此,在悬挂系统的设计中需要综合考虑车辆的操控性能和乘坐舒适性,找到一个合适的平衡点。
另外,悬挂系统的设计还需要考虑到路况的不同。
在不同的路况下,悬挂系统的工作状态也会有所不同。
例如,在平整的公路上,悬挂系统主要起到减震和保持车身稳定的作用;而在崎岖的山路上,悬挂系统则需要具备更好的通过性和缓冲能力。
因此,悬挂系统的设计需要综合考虑不同路况下的工作要求,以确保车辆的行驶安全和乘坐舒适性。
在悬挂系统的设计中,还需要考虑到材料的选择和制造工艺。
悬挂系统的各个组成部分需要具备足够的强度和刚度,以承受车辆的荷载和外部冲击。
同时,材料的选择还需要考虑到重量的控制,以减轻车身负荷,提高燃油经济性。
制造工艺的选择也会对悬挂系统的性能产生影响,因此需要综合考虑材料和工艺的因素。
除了上述的基本要素外,悬挂系统的设计还可以结合先进的技术和创新的理念。
例如,可以采用电子控制悬挂系统,通过传感器和控制器的配合,实现悬挂系统的主动调节和自适应功能,提高车辆的操控性能和乘坐舒适性。
另外,还可以考虑使用新型材料和制造工艺,以提高悬挂系统的性能和耐久性。
综上所述,悬挂系统的设计是一项重要的毕业设计课题。
悬挂运动控制系统(E题)设计报告
悬挂运动控制系统(E题)设计报告摘要:本悬挂控制系统是一个电机控制系统,控制物体在80cm×100cm的范围内作直线、圆、寻迹等运动,并且在运动时能显示运动物体的坐标。
设计采用AT89S52单片机作为核心控制器件,采用57BYG007-4型步进电机和高细分步进电机驱动器SM-60作为动力装置,采用红外反射式光电传感器实现画板上黑色线寻迹检测,显示部分用液晶显示模块LCD1602实现。
关键词:悬挂控制、单片机、步进电机、红外反射式光电传感器一、设计要求1、任务设计一电机控制系统,控制物体在倾斜(仰角≤100度)的板上运动。
在一白色底板上固定两个滑轮,两只电机(固定在板上)通过穿过滑轮的吊绳控制一物体在板上运动,运动范围为80cm×100cm。
物体的形状不限,质量大于100克。
物体上固定有浅色画笔,以便运动时能在板上画出运动轨迹。
板上标有间距为1cm的浅色坐标线(不同于画笔颜色),左下角为直角坐标原点, 示意图如下。
2、基本要求:(1)控制系统能够通过键盘或其他方式任意设定坐标点参数;(2)控制物体在80cm×100cm的范围内作自行设定的运动,运动轨迹长度不小于100cm,物体在运动时能够在板上画出运动轨迹,限300秒内完成;(3)控制物体作圆心可任意设定、直径为50cm的圆周运动,限300秒内完成;(4)物体从左下角坐标原点出发,在150秒内到达设定的一个坐标点(两点间直线距离不小于40cm)。
3、发挥部分(1)能够显示物体中画笔所在位置的坐标;(2)控制物体沿板上标出的任意曲线运动(见示意图),曲线在测试时现场标出,线宽1.5cm~1.8cm,总长度约50cm,颜色为黑色;曲线的前一部分是连续的,长约30cm;后一部分是两段总长约20cm的间断线段,间断距离不大于1cm;沿连续曲线运动限定在200秒内完成,沿间断曲线运动限定在300秒内完成;(3)其他。
4、评分标准5、说明1、物体的运动轨迹以画笔画出的痕迹为准,应尽量使物体运动轨迹与预期轨迹吻合,同时尽量缩短运动时间;2、若在某项测试中运动超过限定的时间,该项目不得分;3、运动轨迹与预期轨迹之间的偏差超过4cm时,该项目不得分;4、在基本要求(3)、(4)和发挥部分(2)中,物体开始运动前,允许手动将物体定位;开始运动后,不能再人为干预物体运动;5、竞赛结束时,控制系统封存上交赛区组委会,测试用板(板上含空白坐标纸)测试时自带。
自动晾衣架控制系统设计毕业论文
自动晾衣架控制系统设计毕业论文目录中文摘要 (I)英文摘要 (II)1 绪论 (1)1.1 自动晾衣架介绍 (1)1.2 晾衣架的历史及现状 (1)1.3 晾衣架行业的发展及未来 (2)2 整体电路设计 (4)2.1 自动晾衣架整体框图 (4)2.2 系统的主要部件方案论证与比较 (4)2.2.1 处理器的选择与论证 (5)2.2.2 驱动电机的选择与论证 (5)2.2.3 直流电机驱动电路的选择与论证 (5)2.2.4 稳压电源方案选择与论证 (6)2.3 系统各模块的最终方案 (6)3 基本元器件介绍及各部分电路设计 (8)3.1 直流电机的运行原理 (8)3.1.1 直流电机的结构 (8)3.1.2 直流电机的基本工作原理 (8)3.1.3 直流电机的额定值 (10)3.2 单片机原理 (11)3.2.1 单片机原理概述 (11)3.2.2 单片机的应用系统 (11)3.2.3 AT89C51简介 (13)3.3 其它主要器件介绍 (17)3.3.1 NE555介绍 (17)3.3.2 集成运放LM358介绍 (19)3.3.3 继电器的介绍 (20)3.3.4 光耦介绍 (22)3.3.5 串行下载口介绍 (23)3.4 各部分电路设计 (25)3.4.1 电源电路 (25)3.4.2 时钟电路 (27)3.4.3 复位电路 (28)3.4.4 按键电路 (29)3.4.5 超重检测电路 (29)3.4.6 状态指示电路 (30)3.4.7 声光报警电路 (31)3.4.8 过流保护电路 (32)3.4.9 控制电机正反转电路 (33)3.4.10 串口电路 (34)4 系统的软件各部分设计与实现 (36)4.1 超重检测部分 (36)4.2 上升部分 (36)4.3 下降部分 (37)4.4 过流中断部分 (38)5 设计总结 (39)参考文献 (40)附录 (41)1 绪论1.1 自动晾衣架介绍目前晾衣架分手动、自动两种。
悬挂控制系统的设计
中图分 类号 :P 7 . T 23 1
文献 标识 码 : A
文章 编 号 :62—14(0 00 0 1 —0 17 072 1)3— 03 3
1 11 .9 9 . s .6 2—14 .0 0 0 .5 3 :0 3 6 /ji n 17 0 s 0 7 2 1 .3 0
1系统设 计
第 l 卷第 3 2 期 2 1 6月 00年
黄 冈 职 业 技 术 学 院 学 报
Ju nlo a g a gP ltc nc o ra fHu n g n oye h i
Vo . 2 No 3 1 1 .
Jn.0 0 u 2 1
悬 挂 控 制 系统 的 设 计
宋 武
( 冈职 业技 术 学院 机 电工程 系, 黄 湖北 黄 冈 4 80 ) 30 2
的角度一步一 步向设定 方向转动 , 步进 角一般为 03 .6度 18度 , 度 很 高 , . 精 而且 可 以实 现 转子 锁
定 。 由此 选择 步 进 电机 。 12循 迹模 块 方案 .
一
悬挂 控 制运 动 系统 为典 型 的 实时 控 制设 计 , 宜 用单 片机 控 制来 实现 。系 统 可 以划 分 为 控 制 部 分
机构 , 通过接收到的脉 冲信号驱动电机转轴 以固定
4V 直流 电流 4 , 6, A 具有过热保护功能。单片机给
收稿 日期 :oO—o —2 21 4 o 作者简 介: 宋 武 【93一) 男 , 18 。 助讲o hhzs @16Pn b gyw 2 . l . o
・
1 ・ 3
1 n 1 l
图 2电机 控 制电
i
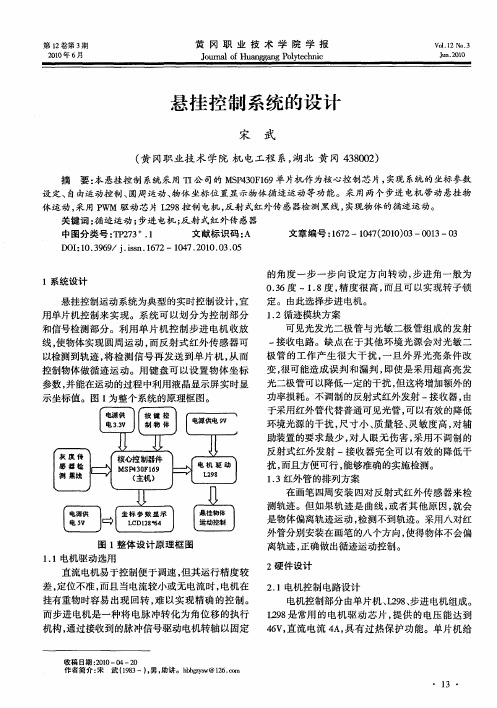
硬件 比较简单。 ( ) 晶 S 72 , 计 使用 P ._P . 2液 T 90设 30 一32三个 I / , 22 . 键盘、 显示电路设计与实现 0口作为液晶的数据/ 命令/ 状态 口。 具体电路如 图 3 所示 , 键盘采用 4 4 阵键 * 矩 () 3 电机 控制 , 采用 P 4口分 别控 制左 右两个 步 盘与单 片 机 的 ]0 口相 连 ; / 显示 电路 采用 18 4 2 *6 进 电机 。 L D与 单 片 机 相 连 , P3F6 C MS40 19作 为 串 行 口方 式 () 电传 感 器 , P3 4光 MS40的 P 1口接 收光 电管 输出与液晶显示屏通信 , 大大节省了单片机 的 /O / 的信号, 单片机做出相应反应。 口资源。液晶是 18 6A, 2 * 4 能够显示 图形和汉字 , 3软 件设计 图文并茂 , 界面良好 。其 中 D 0到 D 是数据 E,/ 7 lR
汽车悬架系统毕业设计

目录第1章绪论1.1 悬挂系统概述........................................1.2 设计要求.........................................第2章悬挂系统总体参数设计与计算2.1主要技术参数2.2悬架性能参数确定2.3悬架静挠度2.4悬架动挠度2.5悬架弹性特性曲线第3章弹性元件的设计计算3.1前悬架弹3.2后悬架弹第4章悬架导向机构的设计4.1导向机构设计要求4.2麦弗逊独立悬架示意图4.3导向机构受力分析4.4横臂轴线布置方式4.5导向机构的布置参数第5章减振器主要参数设计5.1减振器概述5.2减振器分类5.3减振器参数选取5.4减振器阻尼系数5.5最大卸荷力5.6筒式减振器主要尺寸第6章横向稳定杆设计6.1横向稳定杆参数确定第7章结论参考文献致谢附录Ⅰ附录II第一章悬挂系统概述(1)概述汽车悬架系统是底盘平台的重要组成部分,直接影响到汽车行驶的操作稳定性,乘坐的舒适性和安全性,往往被编入技术规格表,作为评价汽车性能品质的标准之一。
汽车悬架是安装在车桥和车轮之间用来吸收汽车在高低不平的路面上行驶所产生的颠簸力。
因此,汽车悬架系统对汽车的操作稳定性、乘坐舒适性都有很大的影响。
由于悬架系统的结构得到不断改进,其性能及其控制技术也得到了迅速提高。
尽管一百多年来汽车悬架从结构形式到作用原理一直在不断地演进,但从结构功能而言,它都是有弹性元件、减振装置和导向机构三部分组成。
在有些情况下,某一零部件兼起两种或三种作用,比如钢板弹簧兼起弹性元件和导向机构的作用,麦克弗逊悬架中的减振器柱兼起减振器及部分导向机构的作用,有些主动悬架中的作动器则具有弹性元件、减振器和部分导向机构的功能。
(2)总体设计方案1. 完成悬挂系统总体参数设计:2. 完成弹性元件设计计算3. 完成减震器主要参数选择4. 完成悬架导向机构及横拉杆设计5. 完成设计相关的图纸6. 编写设计说明书第2章悬挂系统总体参数设计与计算2.1主要技术参数整车的基本参数见表前悬非簧载质量为50kg 后悬非簧载质量为80kg簧载质量(满载)前簧载质量=满载轴荷质量—非簧载质量770—50=720kg后簧载质量=满载轴荷质量—非簧载质量860-80=780kg非簧载质量:前悬非簧载质量为50kg 后悬非簧载质量为80kg 3.2悬架性能参数确定(1)自振频率(固有频率)选取根据国家规定对发动机排量在1.6L以下的乘用车,前悬架满载偏频要求在1.00――1.45Hz,后悬架要求在1.17――1.58Hz。
前悬架毕业设计

前悬架毕业设计前悬架是汽车悬挂系统中的重要组成部分,它对汽车的操控性能和乘坐舒适性起着至关重要的作用。
在汽车设计领域,前悬架的优化和改进一直是研究的热点之一。
本文将探讨前悬架的毕业设计,从设计的目标、方法和结果等方面进行分析和讨论。
首先,我们需要明确前悬架设计的目标。
前悬架的设计旨在提高汽车的操控性能和乘坐舒适性,同时要满足安全性和可靠性的要求。
在设计过程中,需要考虑到汽车的使用环境和条件,以及用户的需求和期望。
因此,前悬架的设计目标应该是综合考虑各种因素,寻求最佳的平衡点。
接下来,我们来讨论前悬架设计的方法和流程。
前悬架设计通常包括几个关键步骤:需求分析、概念设计、详细设计和验证测试。
需求分析阶段需要确定前悬架的基本要求,如悬挂方式、悬挂结构、材料选择等。
概念设计阶段是在需求分析的基础上,通过建立数学模型和仿真分析等手段,提出不同的设计方案,并进行评估和比较。
详细设计阶段是将选定的设计方案进行具体化,包括零部件的尺寸设计、装配方式的确定等。
最后,验证测试阶段是对设计方案进行实际测试和验证,以确保其符合设计要求。
在前悬架设计中,常用的方法和工具包括CAD软件、有限元分析软件和试验设备等。
CAD软件可以用于进行三维建模和装配设计,提高设计效率和准确性。
有限元分析软件可以用于进行结构强度和刚度的计算和分析,帮助设计师评估和改进设计方案。
试验设备可以用于实际测试和验证,以获取真实的性能数据和反馈。
在前悬架设计的过程中,还需要考虑到一些特殊因素和挑战。
例如,前悬架的设计需要考虑到汽车的重量分布和动力系统的特点,以确保悬挂系统的稳定性和可靠性。
此外,前悬架的设计还需要考虑到制动系统和转向系统的配合和协调,以提高汽车的操控性能和安全性。
因此,前悬架设计的难度和复杂性是相对较高的,需要设计师具备扎实的理论基础和丰富的实践经验。
最后,我们来讨论前悬架设计的结果和应用。
一个优秀的前悬架设计应该能够满足设计目标,提高汽车的操控性能和乘坐舒适性。
悬架系统设计与分析毕业设计论文

悬架系统设计与分析Design and analysis of suspension system本科生毕业设计(论文)外文翻译毕业设计(论文)题目:悬架系统设计与分析外文题目:An Overview of Disarray in Active Suspension System 译文题目:主动悬架系统杂谈毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
悬挂运动控制系统摘要:本系统以单片机89C52为核心,采用了步进电机控制装置、红外寻迹传感装置来实现一个对悬挂物体运动控制系统。
友好的操作界面和灵活的监控方式是本设计的两大特色,增强了系统的实用性。
关键词:步进电机;红外传感器;悬挂运动。
一、方案论证与选择1.题目任务要求及相关指标的分析课题任务要求中,要求在150秒内到达设定的一个坐标点以及300秒内画圆或按照设定的轨迹运动,这要求我们对左右两个电机进行灵活、准确、快速的控制,并且有和谐的人机交换功能,才能够满足要求。
因此选择合适的电机以及运用有效的算法来对电机进行控制是必需的,我们通过建立合理的数学模型,使两电机控制的绳长依照我们建立的函数关系变化,来实现悬挂物体在板上以各种方式运动。
课题任务中,要求控制物体沿板上标出的任意曲线运动,通过红外传感器寻迹,实现跟踪运动。
而显示画笔的位置坐标,则可通过两段绳长变化与原点坐标之间的函数关系来计算,求出当前点的横纵坐标,并在LCD上显示出来。
2.方案的比较与选择(1)电机的选择方案一:直流电机采用单片机和A/D转换构成系统,控制普通电机的步数和旋转方向,可以考虑达林管组成的H型PWM电路。
用单片机控制达林管使之工作在占空比可调的开关状态,精确调整电机转速,减小因惯性,速度,步距角过大而引起的调整误差,达到改变绳长的要求,缺点是通过控制直流电机驱动模块将脉冲信号转化为模拟信号,需要将单片机输出的序列脉冲转换,延长了控制的时间,导致控制精度差;关键是直流电机不能即停,使直流电机不能精确定位,满足不了控制误差X围为设定值的要求。
方案二:步进电机用单片机产生脉冲信号,脉冲信号的占空比为0.5左右,脉冲信号经过功率放大控制步进电机,控制信号为数字信号,不再需要数/模转换;步进电机的速度易于控制,具有快速启/停能力,可在一刹那间实现启动或停止;它的转动角度严格可控,一般情况步距角可以降低到 5.1以下,而采用专用驱动块,可以更加的精确。
步进电机延时短,定位准确,精度高,可控制性强。
这样我们就可以根据驱动脉冲总数来计算绳子所走过的路程,从而得出坐标和时间。
根据本课题技术指标要求,物体质量大于100克即可,步进电机的输出功率足以满足负载要求;同时根据题目要求运动轨迹与预期轨迹偏差不超过4cm,这对电机有精确的要求,而直流电机难以达到这一指标。
综上方案的比较分析,故而本设计采用方案二。
(2)悬挂物体定位方式的选择方案一:坐标查询方式在80cm×100cm的白色底板上,等分为8000个方格,视其为8000个点,每个点都有横纵坐标(a,b)两个数据,即共有16000个数据,而底板左右对称,所以只需记录一半的数据,即8000个,这样我们只需事先计算出悬挂物体在每一点对应的两侧绳长(x,y),将这8000个数据,即4000个确定的绳长数组记录在单片机中,这样就可以对所设定的坐标,采用查询的方式,找到相应点所对应的数组(x,y),与当前点对应的绳长做差,得到所需的绳长改变量,从而控制电机使物体到达该点。
此方案的优点在于查询方便快捷,准确性高,动作运动迅速,但准备工作的计算量太大,而且需要通过一块片外的ROM来存储如此庞大的数组集,不方便实现。
方案二:公式计算方式根据题目中给出的各段长度,可以很容易的得到底板上各点坐标与两电机分别对应的绳长之间的函数关系,这样可以根据给定点的坐标求出各绳长或根据绳长求出点的坐标,能够实现各项指标,实现悬挂物体的精确定位,满足题目的要求。
该方案数学模型清晰,可以在较短时间内完成绳长或坐标的计算,使电机快速动作,无须片外ROM存储,而且占用单片机内存少,空间利用率较高,可操作性强。
综上方案的比较分析,根据本课题技术指标要求,用公式计算的方法比较容易实现,故而本设计采用方案二。
(3)画圆方案的选择方案一:切分拟合法首先通过周长计算,将圆等分为3000等份,然后依次计算初始点到下一点的坐标增量,通过增量来控制两个电机的运动,从而调整绳长,实现点对点的精确移动,也就是说所画的圆是由3000段小线段与之拟合连接起来的。
这需要我们有足够快的运算速度,与很高的精度,依次精确计算出每一次步进的距离,横纵坐标和两段绳子的改变量,占用内存很大,计算时间较长,反应到电机上就是电机的运动时断时续,画圆的用时很长,线段相对光滑,但是累积误差比较大。
方案二:查询计算法第一步要求我们能够画出一个题中要求的标准圆,然后将这条轨迹对应的各点坐标与相邻坐标的增量处理后详细记录,并且存储到单片机内,当我们需要画圆的时候,只需要调用这些标准增量,通过公式计算出绳长的改变量,就可以很精准的得到:左右电机从当前点运动到相邻点的脉冲数目与方向。
这样就可以实现快速、准确、美观的画圆。
上述两种方案中,方案二可以避免复杂的计算,缩短电机的等待时间,没有误差的累积,反应快速、灵活,画面连续、美观,实现起来也比较方便。
因此,我们画圆采用上述的方案二。
(4)寻迹传感器的选择发挥部分寻迹传感器可供选择的种类较多,主要有以下两种:方案一:光电传感器光电传感器有多种类型,按其外表结构有对射型、回归反射型、扩散反射型;按光源色分类又有红色、绿色、蓝色、红外以及半导体雷射等,其自身带有内置的或分离的放大器。
根据题目的要求,要使所选传感器可以很好区分白色与黑色,有多种光电传感器可供选择,某些光源色为红色或绿色的光电传感器由于其对黑色与白色的反射率相差很大,所以可以很容易的识别。
但是其价格昂贵,结构偏大,外围机械部分比较复杂。
方案二:红外传感器红外传感器是我们非常常用的一种传感器,也具有很强的对黑色与白色的辨识能力。
由于红外光波长比可见光长,因此受可见光的影响较小。
同时红外系统还具有以下优点:尺寸小、质量轻,能有效的抗可见光波段的伪装,对辅助装置要求最少,对人眼无伤害。
当然红外光也有一定的缺点,如大气、潮湿的天气、雾和云对它有衰减作用。
它具有体积小、灵敏度高、线性好等特点,外围电路简单,安装起来方便,电源要求不高。
用它作为近距离传感器是最理想的,电路设计简单、性能稳定可靠。
综上方案的比较分析,根据本课题技术指标要求,故而本设计采用方案二。
(4)寻迹传感器布局的选择方案一:5传感器梅花状分布采用上、中、下、左、右各装一个红外传感器来探测黑线,常态让中间的传感器保持在黑线上面,其余四个方向的传感器用来告知控制系统:该传感器所在的位置,是否为黑线上方。
若在,则控制画笔向该传感器所在的方位移动,否则保持原来的移动方向不变,直到某个传感器探测到黑线,并发出信号为止。
这种方法虽然所用器件少,但是可靠性相对较差,精度较低。
方案二:8传感器九宫图分布在九宫格中间的右上、右、上、右下、左上、左下、左、下这八个方向装上红外传感器,并按照上面的顺序设置优先级。
优先级的设定,取决于坐标原点相对于运动区域的所在位置。
这样的话,我们就可以很容易的探测出黑线的前进趋向,依照优先级来控制电机的运动,可以准确快速实现寻迹功能,能够精准追踪1.5cm~1.8cm宽的黑色轨迹。
比较以上两种方案,方案一的探测X围显然要小,一旦传感器组处于黑线的同一边时,就很难重新自纠正,尤其是碰到有间断的曲线时,就很难控制它的运动;而方案二则可以探测较大的X围,实现多方位探测,控制思想较之方案一要先进的多,便于实现PID控制。
(5) 小结经过仔细比较与论证,我们确定了整个控制系统各个模块的最终方案如下:电机的选择:步进电机,带专用驱动模块,通过单片机输出脉冲信号来控制;悬挂物体定位方式的选择:公式计算方式,求出点坐标对应的绳长,用步进电机实现绳长的改变。
画圆的算法:存储、查询计算,预先存储标准圆的相应增量,以便随时调用。
发挥部分寻迹传感器的选择:红外传感器发挥部分寻迹传感器布局方法的选择:九宫图分布二、系统总体设计方案及实现方框图系统以89C52单片机为核心,加以其他外围电路实现较高精度定位。
由于只需控制左右两个电机,所以其外围电路较简单,由于要实现高精度的控制,而硬件上的误差影响太多,所以需采用合理程序实现优良性能。
系统原理图三、理论分析与计算该设计以单片机控制的两个步进电机为基本构架,两电机控制各自的绳长实现悬挂物体的二维移动。
根据题目将滑轮近似为一点(误差在最后单片机做出补偿),我们根据如图3.1中各线之间的关系,得到关系式如下:222222(15)(115)(95)(115)x a b y a b ⎧=++-⎪⎨=-+-⎪⎩ (1) 其中:x 为左电机控制的滑轮右侧绳长;y 为右电机控制的滑轮左侧绳长;a 为以图中标出的原点为原点物体所对应的横坐标; 图3.1b 为物体所对应的纵坐标。
这样通过输入设定值,便可在单片机中依式(1)计算得出绳长x 和y ,与所在点的坐标所对应的绳长做差,便可得到电机所需运动的绳长及转动方向,便可通过单片机对电机驱动, 图3.1实现对悬挂物体的精确定位。
在实现控制物体沿板上标出的任意曲线运动的过程中,我们实现了系统每移动到一个坐标便在LCD 上显示这点的坐标,这就要求根据绳长的变化得到坐标的变化,同样在单片机内部可依据式(1)进行逆变换,得到如下的函数,式(2)22228800220115(15)x y a b x a ⎧-+=⎪⎨⎪=--+⎩(2) 依次可算出a 、b ,得到所在点的坐标,从而显示出来。
四、主要功能电路的设计1.基本说明由于本系统设计所要求的精度较高,我们用单片机输出脉冲控制的步进电机,每前进一个步距的距离为0.046mm ,速度易于控制,具有快速启/停能力,可以达到精度高、速度快、定位准这些优良的性能,足以很好的满足各项性能要求。
反射式红外传感器,其工作原理为:红外发射管发射红外光,接收管是否接收到红外光,对应了接收管的导通与截止两种状态,导通时有一个变化的通光电流,我们只需对微弱的通光电流进行上拉,变为电压信号,再对这个电压信号进行比较,输出开关脉冲,由单片机的I/O 口将检测到的开关信号送到单片机进行识别、分析,然后发出相应的控制指令。
整体电路的设计简单合理、性能稳定可靠。
2.关键电路单元的考虑和计算红外寻迹传感器的电路设计如右图4.1,传感器型号采用反射式红外发射—接收管ST188,比较器采用LM339,用两片以满足8个红外传感器的需求。
查资料得,红外发射管的极限电流为50mA ,我们取中间态计算:1510050V R mA==Ω, 红外接收管的通光电流最大为l I =0.25mA ,可以计算其导通截止两种状态的电平所需电阻最小为:图4.1 红外寻迹电路min 5 1.25150.25D l Vcc V V V R k I mA--===Ω ,其中D V 为导通管压降,实际电路中取大于15k Ω,取3R =100k Ω。