乐高机器人测验
乐高机器人五级测评试题-计算机系统分析师综合知识试卷与试题

乐高机器人五级测评试题-计算机系统分析师综合知识试卷与试题一、选择题1. 乐高头脑风暴第三代mindstorms机器人主机叫A. RCXB. NXTC. EV3D. SPIKE答案:C2. EV3主机中ABCD端口连接的是(),1 2 3 4端口连接的是()A. 马达、传感器B. 传感器、马达C. 马达传感器都可以D. 电脑、传感器答案:A3. EV3主机屏幕像素为()A. 360X480B. 360x360C. 127X177D. 129X200答案:C4. 下列关于汉堡包结构表述正确的是()A. 上下两层梁,中间两层薄片B. 上下两层薄片,中间两层梁C. 上下两层梁,中间一层薄片D. 上下两层梁,中间3层薄片答案:A5. 下列不能当做动力的是()A. 连接上电源的马达B. 往下掉落的重块C. 拉开的橡皮筋D. 彼此咬合的两个齿轮答案:D6. 下面图片中大齿轮带动小齿轮后小齿轮上的轴速度变化为()A. 加速5倍B. 减速5倍C. 加速3倍D. 减速3倍答案:A7. 下图程序结束后D端口马达应该转动多少度()A. 360度B. 1080度C. 不会转动D. 无法确定,短时间不会停止答案:B8. EV3在连接电脑时除了利用USB连接以外,以下哪种方式还可以连接()A. 红外B. 蓝牙C. 超声波D. 以上都可以答案:B9. 下列哪种物体上会用到复合式杠杆结构:A. 梯子B. 折叠桌C. 伸缩门D. 以上都是答案:C10. EV3主机键盘共有几个按键A. 4B. 5C. 6D. 7答案:C11. 在杠杆中,动力臂大于阻力臂被称为()A. 省力杠杆B. 费力杠杆C. 等臂杠杆D. 等力杠杆答案:A12. 齿轮加速至少需要用到2个不一样大的齿轮,那么齿轮三级加速至少需要几个齿轮?A. 4B. 5C. 6D. 7答案:C13. 齿轮在进行一级加速时,加速了3倍,其中大齿轮有36个齿,那小齿轮有几个齿?A. 8B. 12C. 16D. 24答案:B14. 重力势能跟物体的相对()有关系?A. 高度B. 距离C. 重量D. 以上都有关系答案:A15. 能够改变传动方向的齿轮是()A. 冠状齿轮B. 斜齿轮C. 涡轮D. 以上都可以答案:D16. 目前哪种能量我们可以将它转变成电能?A. 风能B. 太阳能C. 水能D. 以上都可以答案:D17. 汉堡包结构共有基层结构()A. 2层B. 4层C. 6层D. 8层答案:B18. 每两个带圆孔部件之间进行连接至少需要固定几个点才能保证连接的牢固性。
LEGO机器人实验报告

LEGO机器人实验报告课程名称人工智能实验名称LEGO机器人组装与测试组长姓名(学号)组员姓名辅导教师实验时间一.实验目的通过实验,了解LEGO机器人的组装以及传感器的应用,进一步认识人工智能在实际生活中的运用与实践。
二.实验内容及步骤、结果实验内容:小组组装机器人,可安两个光传感器,在规定跑道上跑一圈,按用时计成绩。
实验步骤:1、组装一个合适的机器人小车;2、编写一个机器人代码;3、调试代码。
实验结果:经过不断的调试与测试,最后小车顺利跑出31秒的成绩。
三.实验方案(采用了什么方法使机器人跑的更快)1、在保证除了两个直角弯外小车不冲出去的前提下,马达尽量调到最大值;2、在小弯道时尽量减少倒车的使用;3、转直角弯用时尽量最短,小车后退转弯时两个马达值相差尽量大,然后调试好等待时间;4、如果在小车制动失败冲出黑白线时,加入特技动作,即顺时针转270°再次进入跑道;5、用光电传感器测出正确的临界值。
四.实验中的问题(调试过程)1、首先是直道速度过快,小车在拐直角时制动差,容易冲出跑道,后来反复试验,先确定一个最保险的程序代码,然后再增大速度值,采用转弯时两个马达的灵敏配合和加入特技动作的方案以达到最后的顺利拐弯,但是很可惜,时好时坏,最后测试中并没有采用。
2、是光电传感器的临界值设定问题,要在不同的地点多次测量,然后求出平均值,以使小车达到最灵敏;3、小车容易冲出去,怎么办?一是传感器的问题,因为值的设定导致“反应”不灵敏,二是马达的问题,能量值不能和传感器很好地相匹配。
在此过程中,我们组一边寻找传感器的最佳临界值,比如调整马达的高低、两个马达之间的距离等;一边调整马达的值,比如直道上的行驶值、转弯时两个马达的配合值等,使二者尽量达到完美结合。
五.实验程序#pragma config(Sensor, S1, lightSensor, sensorLightActive)#pragma config(Sensor, S2, lightSensor, sensorLightActive)task main(){wait1Msec(1000);while(true){if(SensorValue[S1]>35&&SensorValue[S2]<30){// motor[motorA]=1;motor[motorA]=0;motor[motorB]=60;}elseif(SensorValue[S2]>30&&SensorValue[S1]<35){motor[motorA]=50;motor[motorB]=0;}elseif(SensorValue[S1]>45&&SensorValue[S2]>40&&SensorVa lue[S1]<55&&SensorValue[S2]<48){motor[motorA]=60;motor[motorB]=10;wait1Msec(650);motor[motorB]=65;wait1Msec(100);}elseif(SensorValue[S1]>55&&SensorValue[S2]>48){wait1Msec(500);motor[motorA]=0;motor[motorB]=0;}else{motor[motorA]=50;motor[motorB]=50;}}}六.心得体会(每个成员都要写)通过此次LEGO机器人组装与测试的实验,让我对课堂上教员讲的知识有了更直观的认识,从而对课程产生了浓厚的学习兴趣,为接下来的学习实验做好了准备。
工业部乐高评级

工业部乐高评级
2022年1月1日上午,乐高机器人考级能力测评考试在江阴市
少年宫乐高机器人项目组正式开考。
一百多名学员参加了此次测评。
所以此次等级考试,对于孩子们未来的发展会有很大的促进作用,也让孩子们通过考试,了解到自己的不足和欠缺。
现成绩已出炉,首先祝贺我们的学员取得好成绩,也为这些优秀同学持之以恒地坚持和浓厚的兴趣而感动!
乐高机器人考级考试证书是由国际人工智能教育研究院、中国电子商会人工智能委员会、国际青少年机器人教育联合会颁发。
在我国青少年机器人教育编程活动以及青少年科技认知水平现状分析的基
础上开展,根据相关知识点和软硬件条件设计的,是关于青少年机器人技术知识掌握水平与动手能力的能力测评。
此次考试测评,给了孩子们一个展示学习成果的舞台,也让家长和老师对孩子们的学习有了一个全面的了解,老师可以根据孩子们的成绩来调整孩子们下一阶段的学习,家长可以看到孩子的成长和不足,可谓三赢。
乐高机器人考试

乐高机器人考试(总16页)--本页仅作为文档封面,使用时请直接删除即可----内页可以根据需求调整合适字体及大小--全国青少年机器人技术等级考试测试试卷(一级)分数:100 题数:45总体情况姓名开始时间结束时间用时(分钟)得分得分率是否通过考试状态JQR2018-03-11 12:33:382018-03-11 12:33:44*********已提交一、单选题(共30题,每题2分,共60分)1.如下图齿轮组所示,齿轮1的直径是20,转速为100rpm,齿轮2的直径是40,齿轮3的直径是10,当齿轮1为主动轮时,齿轮3的转速为A. 50B. 100C. 200D. 1502.下列说法正确的是A. 只要是利用杠杆原理的,都是省力杠杆。
B. 千斤顶利用了杠杆原理,为了省力。
C. 推动带有四个轮子的货车是利用了杠杆原理。
D. 生活中无费力杠杆。
3.下列人物形象中,哪一个是机器人?A.B.C.D.4.当阻力作用线到支点作用线的距离大于动力点到支点的距离时,杠杆A. 省力B. 费力C. 既不省力也不费力D. 以上答案都不对5.如下图中,动滑轮有()个。
A. 1B. 2C. 3D. 06.木工师傅使用斧头作为工具,是利用()能省力的原理。
A. 滑轮B. 轮轴C. 斜面D. 杠杆7.在日常生活中,用10N的拉力不能提起重15N的物体的简单机械是A. 一个定滑轮B. 一个动滑轮C. 杠杆D. 斜面8.机器人的英文单词是A. botreB. boretC. robotD. rebot9.关于轮轴的描述,下列说法正确的是A. 轮轴与杠杆的没有任何关系B. 轮轴就是轮子C. 轮轴就是根轴D. 轮轴工具的外形不一定是圆形的,但受力作用后的运动轨迹一定是圆形的10.下列简单的机械中,既可以省力,同时又可以改变力的方向的是A. 定滑轮B. 动滑轮C. 斜面D. 滑轮组11.下列图形中,不具稳定性的图形是A.B.C.D.12.机器人结构中,起着支撑作用的部件是A. 机座B. 机体C. 腰部D. 臂部13.关于齿轮,下列说法不正确的是A. 大齿轮带动小齿轮,升速。
乐高试卷试题

中国机器人教育联盟ROBOC国际机器人创客等级测评考试〔二级卷〕得分: _________姓名:_______年龄:________考号:________〔总分: 100 分〕选择题:〔共 25 题〕1. 骰子图标代表什么意义?( C )A 大小;为B 数字;为C 随机;为D 时间;2.乐高起源于哪个国家? ( C )A 中国B美国C丹麦D迪拜课程中有多少个传感器?( B )A 1B 2C 3D 44.鼠标箭头变成什么形状可以更改数字?( A )A (T)B (A)C (B)D (Z)5.程序运行有几种启动方式?( C )A 1B 2C 3D 46.可声控编程的图标是?( C )A B C D7. 杠杆分为哪几种?(A)A 为省力杠杆;费力杠杆;等臂杠杆;B 为省力杠杆;既不省力也不费力杠杆;等臂杠杆;C 为费力杠杆;省力杠杆;D 为费力杠杆;等臂杠杆;8. 滑轮之间传动需要什么 ?(A)A 为橡皮筋为为B 为啮合为为C 为齿轮为为D 为杠杆9. 三角形有什么特点?(C)A 稳定;容易变形为为为为为为B 不稳定;容易变形C 稳定;不容易变形为为为为D 不稳定;不容易变形10.几个点可以确定一条直线?(C )A 为 3 点为为为B 为 1 点为为为C 为 2 点为为D 4 点11.圆的中心叫圆的什么?(D)A 直径B 半径C 圆弧D 圆心12.齿轮的加速系统是什么齿轮带什么齿轮?( B)A 为小齿轮带大齿轮;为为为为B 为大齿轮带小齿轮; C为小齿轮带小齿轮;为为为为 D 为大齿轮带大齿轮;13. 涡轮装置有什么特点?( A )A 为减速系统;自锁作用;力气大B 为减速系统;自锁作用C 为加速系统;力气小D 为加速系统;自锁作用;力气小14. 地面越光滑摩檫力怎么样?(A)A 越小B 越大C 不变D 越大或越小15. 冠状齿轮有什么作用?( C )A 加速B 减速C 改变齿轮传动的方向为D 为了美观16. 一个乐高单位代表?( B )A 为 1CM为B 为一个孔位为C 为两个孔位为 D为 2CM17. 大齿轮与小齿轮咬合, 40 齿的转一圈8 齿的齿轮转多少圈?( B )A 为 3 圈为为为B 为 5 圈为为为C 为 1 圈为为为D 为 8 圈18. 涡轮装置是哪些材料组成的?( D )A 轴、大齿轮、涡杆;为为为为B 销、中齿轮、涡杆;C 滑轮、销、小齿轮;为为为为D 轴、中齿轮、涡杆;19. 以下传动中哪些传动的方向是正确的?( D )20. 以下不属于杠杆原理的是?( C )A 为天平;为B 为跷跷板;为C 为弹簧秤;为D 为筷子;21 .以下哪些图形是对称的?( A )A. B.A BC D.课程中有多少个传感器?( B )A 1B 2C 3D 423. 四边形有什么结构特点?(A)A 稳定;容易变形为为为为为为 ;B 不稳定;容易变形C 稳定;不容易变形为为为为D 不稳定;不容易变形C24、大齿轮与小齿轮咬合, 40 齿的转一圈 8 齿的齿轮转多少圈?我我 DBA为 3 圈为为为 B 为 5 圈为为为 C为 1 圈为为 D为 8 圈25. 循环模块的作用( A )A、重复执行任务 B 、执行一次任务 C 、不执行任务26.下面关于电子元件使用方法的说法中,错误的选项是? ( B )A 拿电子元件要拿主体局部,不拉电线B 电源接通不亮,要用力插C 发现电子元件损坏,及时告诉老师D 电子元件轻拿轻放27. 陀螺的转速跟它的重心有什么关系?〔C〕A. 没有关系B. 重心越高越好C. 重心越低越好28. 机器人感受外部声音信号的传感器是〔B〕A、颜色传感器B、声音传感器C、运动传感器D、角度传感器xiàmi àn de t ú bi āo d ài bi ǎo de hán yì shìshén me29、下面的图标代表的含义是什么?〔 B〕mǎ d á zhu ǎn d ònɡxún hu án m ǎ d áɡōnɡA. 马达转动B.循环C.马达功l ǜsh ēnɡ yīn率 D.声音ch én ɡ xù bi ān xiě zhōn ɡkòn ɡ zhì m ǎ d áɡōn ɡ l ǜde mó ku ài zuì d àɡōnɡ l ǜshìdu ōsh ǎo 30、程序编写中控制马达功率的模块最大功率是多少?( D 〕h àn b ǎo b āo ji éɡòu yǒu jǐɡèli ánɡ h éj ǐɡèpi àn zǔ chénɡ31. 汉堡包结构有几个梁和几个片组成?〔A〕li ǎn ɡ ɡèli án ɡ h é li ǎn ɡ ɡè pi àn li ǎnɡ ɡèli ánɡ h ésìɡè pi ànA 两个梁和两个片B 两个梁和四个片sìɡèli án ɡ h ésìɡè pi àn sìɡèliánɡ hébāɡèpi ànC 四个梁和四个片D 四个梁和八个片p í d ài chu án d òn ɡ shì n ǎjǐ zh ǒn ɡxínɡ shì32 .皮带传动是哪几种形式?〔A〕A 0 与 8B 0C 8D 0 与 8 与 3ɡōnɡyu án lǐde qiāo qi āo bǎn yònɡd ào le shén me yuán lǐ33.公园里的跷跷板用到了什么原理?〔 A 〕ɡànɡɡǎnyu án lǐdìnɡhu á lún qǔ bǐnɡlián ɡǎn pínɡh énɡyuán lǐA. 杠杆原理B. 定滑轮C. 曲柄连杆D. 平衡原理du ò lún yǒu shén me zuò y ònɡ34.惰轮有什么作用?〔 D 〕jiāsùji ǎn sùA. 加速B.减速jì b ùjiāsùyěbù jiǎn sùC.既不加速也不减速bùji āsùyěbù ji ǎn sùɡǎi biàn chǐ lún chuán dòn ɡ de fān ɡxiànɡD.不加速也不减速,改变齿轮传动的方向l èɡāodānɡzhōnɡzuì ji ē shí de ji éɡòu shìshén me ji éɡòu35、乐高当中最结实的结构是什么结构?〔 B〕Awō lún w ō ɡǎnBhù suǒ ji éɡòu蜗轮蜗杆互锁结构Cj í lún j í zhuǎDpínɡhénɡyuán l ǐ棘轮棘爪平衡原理xi à li è duō bi ā n xí nɡ zhōnɡzuì wěn d ìnɡ de duō bi ā n xí nɡshì36、下列多边形中,最稳定的多边形是〔 B〕A. B. C. D.hàn bǎ o bā o ji égò u d e zuòyò ng shì37、汉堡包结构的作用是〔B〕shě ng l ìg ùdì ng h ǎo kà n zē ng gāoA.省力B.固定C.好看D.增高38.如果把机器人比作人,那么声音传感器相当于是人的什么器官?〔B〕A、眼睛B、耳朵C、嘴巴D、鼻子xi àli èrén wùxínɡxiànɡzhōnɡnǎyìɡèshìj īqìrén39、下列人物形象中,哪一个是机器人?〔D〕A.BA B C D40.下面垃圾可以放入此垃圾桶? AC D。
乐高机器人教育测量工具
乐高机器人教育测量工具引言乐高机器人教育是一种创新的教育方法,旨在通过使用乐高积木和编程来培养学生的创造力和解决问题的能力。
在这个文档中,我们将介绍一些用于测量的乐高机器人教育工具。
1. 传感器乐高机器人教育套件配备了多种不同的传感器,用于测量和感应。
其中一些传感器包括:- 触碰传感器:用于检测物体是否与传感器接触。
- 距离传感器:用于测量机器人与障碍物之间的距离。
- 颜色传感器:用于识别和测量物体的颜色。
- 陀螺仪传感器:用于检测机器人的姿态和转动。
这些传感器可以帮助学生进行各种测量实验和项目。
2. 编程工具乐高机器人教育的编程工具提供了丰富的功能,可以帮助学生编写代码来控制机器人的测量行为。
学生可以使用编程工具来:- 让机器人从一个位置到达另一个位置的测量。
- 设置机器人在特定条件下的测量动作。
- 测量机器人在不同速度下移动的时间。
- 测量机器人所需的电量和功耗。
- 让机器人测量环境的光照强度。
编程工具为学生提供了实践测量学科知识的机会。
3. 乐高积木乐高积木是乐高机器人教育的核心组成部分。
学生可以使用乐高积木来构建各种不同形状和大小的结构,用于测量和实验。
通过使用乐高积木,学生可以:- 创建一个测量对象,例如一个高度计或一个秤。
- 制作一个简单的测量装置来检测温度或湿度。
- 建立一个测量仪器以测试物体的形状和尺寸。
乐高积木的灵活性和可组合性使学生有无限可能来设计和构建测量工具。
结论乐高机器人教育提供了一种创新和有趣的方式来培养学生的测量技能。
通过使用传感器、编程工具和乐高积木,学生可以进行各种有趣的测量实验和项目。
这种教育方法不仅可以提高学生的科学和技术能力,还可以激发他们的创造力和解决问题的能力。
乐高基础测试
精品好资料——————学习推荐
乐高基础知识测试
1、乐高教育至今有多少年的发展历史?[单选题](14分)
A、34年
B、36年
C、42年
D、48年
答案: A
2、乐高教育机器人最初是由丹麦乐高公司和哪所大学的媒体实验室(Media Lab)进行一项【可编程积木(Programmable Brick)的合作案】?[单选题](14分)
A、哈佛大学
B、麻省理工学院
C、剑桥大学
D、斯坦福大学
答案: B
3、乐高教育学习方案针对哪个年龄段的学员?[单选题](14分)
A、3-16岁
B、5-12岁
C、5-18岁
D、3-12岁
答案:A
4、用6块2×4的乐高积木可以拼出大约多少种不同的组合?[单选题](14分)
A、1000
B、10000
C、一百万
D、九亿
答案:D
5、乐高“头脑风暴”可编程机器人不包括哪一个?[单选题](14分)
A、RCX机器人
B、NXT机器人
C、EV3机器人
D、LXE机器人
答案: D
6、由电脑控制的乐高机器人于那一年被学校引进?[单选题](15分)
A、1983年
B、1984年
C、1985年
D、1986年
答案: D
7、乐高教育器材适用于我国那些学科的教学?[单选题](15分)
A、数学
B、物理
C、通用技术
D、综合实践
E、信息技术
F、以上都是
答案:F
1 / 1。
乐高培训测验答案
乐高培训测验答案:100分【测验】?测验??1、4C教学模式中的四个C分别是(5分)?1.?A、Connect?Construct?Comfortable?Continue??2.?B、Connect?Control?Contemplate?Continue??3.?C、Connect?Construct?Contemplate?Continue??4.?D、Connect?Construct?Calculate?Continue??答案:?c?2、乐高教育倡导__________,把游戏与现实生活紧密联系起来,让学生在游戏过程中主动建构知识。
(5分)?1.?A、做中学??2.?B、玩中学??3.?C、玩中悟??4.?D、做中悟??答案:?A?3、利用________虚拟搭建工具软件可以制作乐高三维模型,帮助学生理解抽象的概念。
(5分)?1.?A、LEGO?PRO??2.?B、LDD??3.?C、LEGO?STUDY??4.?D、LEGO??答案:?B?4、“联系”阶段中最主要的任务是(5分)1.?A、防止学生偏离学习方向??2.?B、激发学生的学习兴趣??3.?C、促进学习学以致用??4.?D、便于课堂的导入??答案:?B?5、案例中,彭老师创设的“Max寄来的任务包裹”情景凸显课堂教学的(5分)?1.?A、趣味性??2.?B、生活化??3.?C、系统化??4.?D、知识性??答案:?A?6、最新研究指出,专注学习和学习效果之间的关联。
学生越(?)于学习,学习就会越有(?)。
(5分)?1.?A、专注、效果??2.?B、喜欢、效果??3.?C、努力、效果??4.?D、喜欢、兴趣??答案:?A?7、在“建构”阶段,彭老师采取了“任务型教学法”。
任务型教学法就是指课堂教学中始终围绕既定的教学任务展开,教师引导学生在任务活动中学习,是一种典型的()教学方法。
(5分)?1.?A、以项目为中心??2.?B、以学生为中心??3.?C、以教师为中心??4.?D、以学校为中心??答案:?B?8、假如在数学课上使用乐高机器人来教学,要求学生通过计算来确定机器人前进的距离,教师使用三种建构级别中的()级别来教学最合适。
乐高机器人考试
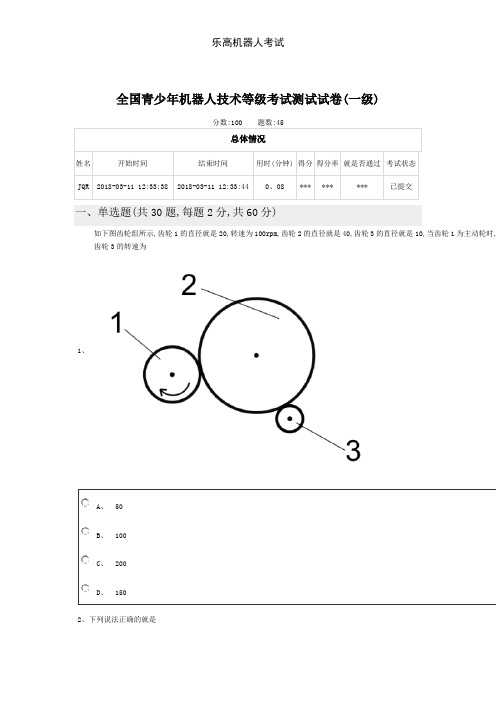
全国青少年机器人技术等级考试测试试卷(一级)分数:100 题数:45总体情况姓名开始时间结束时间用时(分钟) 得分得分率就是否通过考试状态JQR 2018-03-11 12:33:38 2018-03-11 12:33:44 0、08 *** *** *** 已提交一、单选题(共30题,每题2分,共60分)如下图齿轮组所示,齿轮1的直径就是20,转速为100rpm,齿轮2的直径就是40,齿轮3的直径就是10,当齿轮1为主动轮时,齿轮3的转速为1、2、下列说法正确的就是A、只要就是利用杠杆原理的,都就是省力杠杆。
B、千斤顶利用了杠杆原理,为了省力。
C、推动带有四个轮子的货车就是利用了杠杆原理。
D、生活中无费力杠杆。
3、下列人物形象中,哪一个就是机器人?A、BC、D4、当阻力作用线到支点作用线的距离大于动力点到支点的距离时,杠杆D、以上答案都不对5、如下图中,动滑轮有( )个。
6、木工师傅使用斧头作为工具,就是利用( )能省力的原理。
7、在日常生活中,用10N的拉力不能提起重15N的物体的简单机械就是8、机器人的英文单词就是9、关于轮轴的描述,下列说法正确的就是10、下列简单的机械中,既可以省力,同时又可以改变力的方向的就是11、下列图形中,不具稳定性的图形就是A、B、C、D、12、机器人结构中,起着支撑作用的部件就是C 、腰部D 、 臂部13、关于齿轮,下列说法不正确的就是A 、 大齿轮带动小齿轮,升速。
B 、 小齿轮带动大齿轮,增加扭矩。
C 、 小齿轮带动大齿轮,降速。
D 、 带动同样的齿轮,不能升速但能降速。
14使用滑轮组工作就是因为它能A 、 省力当但不能改变力的方向B 、 能改变力的方向但不能省力C 、 既能改变力的方向又能省力D 、 以上答案都不对15、下图中,沿着哪个斜面向上拉动小车最省力16、关于力臂,下列说法正确的就是17、使用下列简单机械,为了省力的就是19、在下列日常生活中用到的工具中,具有传动链的就是20、下列图片中,哪个不就是机器人A、B、CD 、21、动画片《熊出没》中,光头强用来砍树的电锯具有下列哪种结构A 、 传动链B 、 皮带C 、 手枪D 、 帽子22、 日常生活或生产实践中使用的机械,能抽象为斜面的就是A 、 汽车方向盘B 、 吊杆C 、 盘山公路D 、 门把手23、 下列说法不正确的就是A 、 利用机械既可以减轻体力劳动,又可以提高工作效率B 、 杠杆就是一种简单的机械,杆的形状可以就是直的,也可以就是弯曲的C 、 滑轮就是属于杠杆变形的一种简单机械D 、 以上说法均不正确24、 链传动相比齿轮传动的优点就是?A 、 可以在两轴中心相距较远的情况下传递运动与动力。
机器人乐高一级考试知识点
机器人乐高一级考试知识点机器人乐高一级考试涵盖了广泛且重要的知识点,包括机器人设计、编程原理、传感器应用、任务规划和团队合作等方面。
下面将依次介绍这些知识点,以帮助考生充分准备考试。
1. 机器人设计机器人设计是机器人乐高考试的基础,它涉及到结构的稳定性、零件的组装方式、电机的位置摆放和传动系统的设计等。
考生需要熟悉乐高零件的使用方法,了解常见机器人结构,以及学会选择合适的零件和搭建稳定的机器人结构。
2. 编程原理编程是机器人乐高考试中不可或缺的一部分。
考生需要了解乐高编程语言,学会使用编程环境和软件,掌握乐高EV3编程块的基本功能和使用方法。
同时,考生还需要理解编程中的逻辑和循环结构,以及如何利用条件判断和循环语句实现任务的自动化。
3. 传感器应用传感器在机器人乐高中起着至关重要的作用。
了解传感器的种类和功能,以及如何正确连接和使用传感器,是考生顺利完成任务的关键。
考生应熟悉触碰传感器、颜色传感器、陀螺仪传感器等常见传感器的使用方法,并能合理地应用到实际机器人任务中。
4. 任务规划机器人乐高考试往往涉及到多个任务的完成。
考生需要学会任务规划,包括如何分析任务要求、合理安排任务执行顺序、有效利用传感器信息、调试程序等。
考生还需要具备解决问题的能力,能够根据任务情况,灵活调整机器人的设计和程序,以实现任务的顺利完成。
5. 团队合作团队合作是机器人乐高一级考试中的重要组成部分。
考生需要与队友密切配合,共同解决问题。
在考试中,考生需要分工合作,共同制定任务策略、设计机器人、编写程序,并且能够有效地沟通和协作。
团队合作能力不仅对于乐高考试的顺利进行至关重要,也是培养学生综合素质和团队意识的重要环节。
总结:机器人乐高一级考试的知识点包括机器人设计、编程原理、传感器应用、任务规划和团队合作等方面。
考生需要综合运用这些知识点,全面准备乐高考试,以取得优秀的成绩。
在学习和备考过程中,坚持动手实践、多与队友讨论和合作,将有助于提高自己的乐高水平和团队合作能力。
中小学教师信息技术乐高教学机器人(试题及答案)
乐高教学机器人一:单选题(每小题10分)1:超声波传感器是用来检测()的。
A声音B速度C距离D方向A B C D答案:C 错误2:教师学习机器人的主要作用是:A研究最新技术B学科建设需要C兴趣D影响和改变我们的下一代A B C D答案:D 错误3:乐高EV3机器人是乐高的第几代产品A 1B 2C 3D 4A B C D答案:C 错误4:一个乐高EV3主控最多可以接()个传感器。
A1 B2 C3 D4A B C D答案:D 错误5:下面不是乐高机器人常用的零件种类的是:A积木与横杆B连接器C动力机械D主控器A B C D答案:D 错误6:一个40齿齿轮,一个5齿齿轮求最大齿轮比( )A、1/8B、1/128C、1/16D、1/64A B C D答案:A 错误7:9898有几个红外传感器A 0B 1C 2D 3A B C D答案:A 错误8:乐高EV3编程软件是一个()编程软件。
A图形化B流程图C命令行D结构化A B C D答案:A 错误9:程序一般有()种结构。
A1 B2 C3 D4A B C D答案:C 错误10:乐高4C教学模式是联系、建构、反思和:A创新B拓展C延伸D延续A B C D答案:D 错误一:单选题(每小题10分)1:教师学习机器人的主要作用是:A研究最新技术B学科建设需要C兴趣D影响和改变我们的下一代A B C D答案:D 错误2:一个乐高EV3主控最多可以接()个传感器。
A1 B2 C3 D4A B C D答案:D 错误3:9898有几个红外传感器A 0B 1C 2D 3A B C D答案:A 错误4:超声波传感器是用来检测()的。
A声音B速度C距离D方向A B C D答案:C 错误5:一个40齿齿轮,一个5齿齿轮求最大齿轮比( )A、1/8B、1/128C、1/16D、1/64A B C D答案:A 错误6:乐高EV3机器人是乐高的第几代产品A 1B 2C 3D 4A B C D答案:C 错误7:一个乐高EV3主控最多可以接()个马达。
幼儿园美术-乐高教学机器人(试题及答案)
幼儿园美术-乐高教学机器人(试题及答案)一、单选题1. 乐高教学机器人是什么?A. 具有编程功能的积木玩具B. 一款专门用于游戏的玩具C. 一种传统的益智玩具答案:A2. 乐高教学机器人可以用来完成哪些任务?A. 绘画和摄影B. 编程和机器人制作C. 竞速和对战答案:B3. 在幼儿园中,乐高教学机器人对幼儿的启蒙教育有哪些好处?A. 培养幼儿的创造力和想象力B. 培养幼儿的竞技和对抗精神C. 发展幼儿的身体协调能力答案:A二、多选题1. 以下哪些是乐高教学机器人的主要特点?A. 开放式硬件平台B. 独立的编程软件C. 支持多种编程语言答案:A、B、C2. 以下哪些是教授乐高教学机器人的方法?A. 线上直播课堂B. 请专业机器人老师上门授课C. 在幼儿园中开设乐高教学机器人课程答案:A、B、C三、简答题1. 请简要说明乐高教学机器人可以用来进行哪些美术教育活动?答:乐高教学机器人可以用来进行画图、设计、制作和编程等活动。
通过这些活动,可以帮助幼儿发展创造力、想象力和动手能力。
同时,乐高教学机器人也可以激发幼儿对机器人和科技的兴趣,从而提高幼儿的科技素养。
2. 在使用乐高教学机器人教授美术教育时,老师需要注意哪些问题?答:老师需要注意掌握乐高教学机器人的基本操作和编程方法,在教授幼儿时需要耐心、细心地指导和帮助幼儿完成任务。
在教学中,应注重培养幼儿的创造力和想象力,让幼儿逐渐形成自己的创造思维方式。
同时,老师还需要注意幼儿的安全问题,确保幼儿在操作乐高教学机器人时不会因为误操作而受伤。
乐高机器人教育测试表格
乐高机器人教育测试表格测试项目一:机器人组装能力
测试指标:机器人组装完成的准确率和时间
测试项 | 测试结果 |
机器人1 | 通过。
|
机器人2 | 未通过。
|
机器人3 | 通过。
|
测试项目二:机器人编程能力
测试指标:机器人完成编程任务的准确率和时间测试项 | 测试结果 |
机器人1 | 通过。
|
机器人2 | 通过。
|
机器人3 | 未通过。
|
测试项目三:机器人传感器能力
测试指标:机器人成功识别和响应环境中的传感器信号
测试项 | 测试结果 |
机器人1 | 通过。
|
机器人2 | 未通过。
|
机器人3 | 通过。
|
测试项目四:机器人合作能力
测试指标:机器人在与其他机器人合作时的配合度和协作能力测试项 | 测试结果 |
机器人1 | 通过。
|
机器人2 | 通过。
|
机器人3 | 通过。
|
总结
根据上述测试结果,机器人组装能力和编程能力相对较强,但
在传感器能力上存在一定的不足。
机器人在合作能力方面表现出色,能够与其他机器人配合协作完成任务。
综合来看,乐高机器人教育
在培养学生的动手能力、编程思维和团队协作能力方面具有良好的
效果。
请注意:以上测试结果仅供参考,具体结果可能因实际情况而
有所不同。
乐高机器人考试

乐高机器人考试 Prepared on 22 November 2020全国青少年机器人技术等级考试测试试卷(一级)分数:100题数:45总体情况姓名开始时间结束时间用时(分钟) 得分得分率是否通过考试状态JQR 2018-03-11 12:33:38 2018-03-11 12:33:44 *** *** *** 已提交一、单选题(共30题,每题2分,共60分)1. 如下图齿轮组所示,齿轮1的直径是20,转速为100rpm,齿轮2的直径是40,齿轮3的直径是10,当齿轮1为主动轮时,齿轮3的转速为A.50B.100C.200D.1502.下列说法正确的是A.只要是利用杠杆原理的,都是省力杠杆。
B.千斤顶利用了杠杆原理,为了省力。
C.推动带有四个轮子的货车是利用了杠杆原理。
D.生活中无费力杠杆。
3.下列人物形象中,哪一个是机器人A.B.C.D.4.当阻力作用线到支点作用线的距离大于动力点到支点的距离时,杠杆A.省力B.费力C.既不省力也不费力D.以上答案都不对5.如下图中,动滑轮有()个。
A.1B.2C.3D.06.木工师傅使用斧头作为工具,是利用()能省力的原理。
A.滑轮B.轮轴C.斜面D.杠杆7.在日常生活中,用10N的拉力不能提起重15N的物体的简单机械是A.一个定滑轮8.机器人的英文单词是9.关于轮轴的描述,下列说法正确的是10.下列简单的机械中,既可以省力,同时又可以改变力的方向的是11.下列图形中,不具稳定性的图形是B.C.D.12. 机器人结构中,起着支撑作用的部件是A.机座B.机体C.腰部13.关于齿轮,下列说法不正确的是14使用滑轮组工作是因为它能15.下图中,沿着哪个斜面向上拉动小车最省力16.关于力臂,下列说法正确的是17. 使用下列简单机械,为了省力的是19. 在下列日常生活中用到的工具中,具有传动链的是B.自行车C.滑板车D.缝纫机20. 下列图片中,哪个不是机器人A.B.C.D.21. 动画片《熊出没》中,光头强用来砍树的电锯具有下列哪种结构A.传动链B.皮带C.手枪D.帽子22. 日常生活或生产实践中使用的机械,能抽象为斜面的是A.汽车方向盘B.吊杆C.盘山公路D.门把手23. 下列说法不正确的是24. 链传动相比齿轮传动的优点是25. 如图所示,不计滑轮重及摩擦,分别用力F1、F2匀速提升同一重物,则关于力F1、F2的大小关系描述正确的是28. 关于简单机械,下列说法不正确的是29. 下图所示的机器人“大白”是哪部电影中的角色30. 如下图所示为自行车链传动机构,在骑自行车的过程中,关于两个链轮的说法错误的是二、多选题(共5题,每题4分,共20分)31. 在日常生活中,常用的轮轴有32. 关于机器人,下列说法正确的是33. 下列电影与机器人有关的是34. 三角形具有稳定性,有着稳固、坚定、耐压的特点。
乐高机器人教育测评问卷
乐高机器人教育测评问卷---调查目的本问卷旨在评估乐高机器人教育的效果和对学生的影响。
通过参与者的回答,我们将了解乐高机器人教育在促进学生科学、技术、工程和数学(STEM)能力方面的成效,并收集参与者对该教育模式的看法和建议。
---个人信息请提供一些基本的个人信息,以便我们能够分析回答结果,并进行后续的数据分析。
1. 姓名:[请填写]2. 年龄:[请填写]3. 性别:[请填写]4. 学校/机构名称:[请填写]5. 教育程度:[请填写]---乐高机器人教育体验请回答以下问题,以评估您对乐高机器人教育的体验和认知。
1. 您是否参与过乐高机器人教育项目?(请选择其中一个选项)- [ ] 是- [ ] 否2. 如果您参与过乐高机器人教育项目,请选择您参与的课程类型。
(请选择所有适用选项)- [ ] 乐高机器人编程- [ ] 乐高机器人工程设计- [ ] 乐高机器人比赛3. 乐高机器人教育项目对您的STEM能力发展有何影响?(请简要回答)4. 您觉得乐高机器人教育对学生的研究兴趣和动力有何影响?(请简要回答)5. 请分享您在乐高机器人教育过程中取得的最有意义的成就和经验。
(请简要回答)---乐高机器人教育评价请回答以下问题,以评估您对乐高机器人教育的整体评价和建议。
1. 您认为乐高机器人教育对学生的智力发展有何帮助?(请简要回答)2. 您觉得乐高机器人教育对学生创造力和解决问题能力的培养有何作用?(请简要回答)3. 您对乐高机器人教育的课程设置和教学方法是否满意?如果不满意,请提供您的建议。
(请简要回答)4. 您认为乐高机器人教育能对学生的未来发展产生何种积极影响?(请简要回答)5. 请提供任何您认为有助于改进乐高机器人教育的建议。
(请简要回答)---谢谢您参与本次调查!您的回答对于我们评估乐高机器人教育的效果和改进非常重要。
如有任何问题或意见,欢迎在下面留言。
乐高一级机器人考试答案
乐高一级机器人考试答案一、选择题(每题2分,共20分)1. 乐高机器人的传感器中,用于检测光线强度的是?A. 光电传感器B. 声音传感器C. 超声波传感器D. 温度传感器答案:A2. 在乐高机器人编程中,哪个模块用于控制机器人等待一段时间?A. 循环模块B. 等待模块C. 条件模块D. 事件模块答案:B3. 乐高机器人的马达通常有几个?A. 1个B. 2个C. 3个D. 4个答案:B4. 在乐高机器人编程中,哪个模块用于检测机器人是否触碰到障碍物?A. 触碰传感器模块B. 光线传感器模块C. 声音传感器模块D. 超声波传感器模块5. 乐高机器人的编程软件中,哪个选项用于设置机器人的初始位置?A. 开始模块B. 变量模块C. 位置模块D. 传感器模块答案:C6. 乐高机器人的传感器中,用于测量距离的是?A. 光电传感器B. 声音传感器C. 超声波传感器D. 温度传感器答案:C7. 在乐高机器人编程中,哪个模块用于控制机器人重复执行某项操作?A. 循环模块B. 等待模块C. 条件模块D. 事件模块答案:A8. 乐高机器人的马达通常连接在哪个部位?A. 机器人的头部B. 机器人的手臂C. 机器人的腿部D. 机器人的轮子答案:D9. 在乐高机器人编程中,哪个模块用于控制机器人根据传感器输入做A. 循环模块B. 等待模块C. 条件模块D. 事件模块答案:C10. 乐高机器人的传感器中,用于检测声音的是?A. 光电传感器B. 声音传感器C. 超声波传感器D. 温度传感器答案:B二、填空题(每题2分,共20分)1. 乐高机器人的编程语言通常是基于______的图形化编程。
答案:积木式2. 乐高机器人的传感器模块中,______传感器可以检测机器人是否倾斜。
答案:陀螺仪3. 在乐高机器人编程中,使用______模块可以控制机器人的马达速度。
答案:功率4. 乐高机器人的传感器模块中,______传感器可以检测机器人是否接近磁场。
cast乐高机器人活动科技能力测评

cast乐高机器人活动科技能力测评
cast乐高机器人的简单性和多功能性,使我们可以在课堂上进行机器人和编程教学,并做出更多STEM课程。
套装设计孩子们两人一组使用WeDo和一台电脑或平板电脑,这提高了他们的协作和沟通能力。
RoboCamp的教育者在xx的教学中有着长期成功的经验。
我们确信,没有比这更好的工具来让小学生对技术和编程感到兴奋了。
我们自己为WeDo做了一系列课程计划CityCamp,StarCamp和safariccamp等,这证明了更大的可能性—你可以使用cast科学机器人来激发孩子们对物理,力学,天文学甚至生物学的兴趣!
让我们从存储盒开始。
乐高教育cast科学机器人核心套装采用了一个大型、耐用的塑料储物盒,几乎是其前身WeDo1.0的两倍大。
这个盒子有一个半透明的塑料盖子,里面配有一个方便的分类托盘,托盘有13个不同大小的隔间,用来存放小块的乐高积木。
托盘上每个隔间可以存放4到11种类型的乐高积木,根据大小和用途进行分类。
较大的零件存储在托盘下面,在盒子的底部。
还有一张卡片来作为入门指引,包含如何收纳分类积木。
还包括一个贴纸单,可以用来给各个隔间贴上标签,这非常实用,有助于让砖块保持分类。
最好把贴纸贴在分拣托盘每个隔间的一侧,这样在我们要寻找积木或放回积木时就能看到。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
乐高机器人测验
————————————————————————————————作者:————————————————————————————————日期:
全国青少年机器人技术等级考试测试试卷(一级)
分数:100 题数:45
总体情况
姓名 开始时间 结束时间 用时(分钟) 得分 得分率
是否通过 考试状态
JQR 2018-03-11 12:33:38 2018-03-11 12:33:44
0.08 *** *** *** 已提交
一、单选题(共30题,每题2分,共60分)
1.
如下图齿轮组所示,齿轮1的直径是20,转速为100rpm ,齿轮2的直径是40,齿轮3的直径是10,当齿轮1为主动轮时,齿轮3的转速为
A. 50
B. 100
C. 200
D. 150
2.下列说法正确的是
A. 只要是利用杠杆原理的,都是省力杠杆。
B. 千斤顶利用了杠杆原理,为了省力。
C. 推动带有四个轮子的货车是利用了杠杆原理。
D. 生活中无费力杠杆。
3.下列人物形象中,哪一个是机器人?
A.
B.
C.
D.
4.当阻力作用线到支点作用线的距离大于动力点到支点的距离时,杠杆
A. 省力
B. 费力
C. 既不省力也不费力
D. 以上答案都不对
5.如下图中,动滑轮有()个。
A. 1
B. 2
C. 3
D. 0
6.木工师傅使用斧头作为工具,是利用()能省力的原理。
A. 滑轮
B. 轮轴
C. 斜面
D. 杠杆
7.在日常生活中,用10N的拉力不能提起重15N的物体的简单机械是
A. 一个定滑轮
B. 一个动滑轮
C. 杠杆
D. 斜面
8.机器人的英文单词是
A. botre
B. boret
C. robot
D. rebot
9.关于轮轴的描述,下列说法正确的是
A. 轮轴与杠杆的没有任何关系
B. 轮轴就是轮子
C. 轮轴就是根轴
D. 轮轴工具的外形不一定是圆形的,但受力作用后的运动轨迹一定是圆形的
10.下列简单的机械中,既可以省力,同时又可以改变力的方向的是
A. 定滑轮
B. 动滑轮
C. 斜面
D. 滑轮组
11.下列图形中,不具稳定性的图形是
A.
B.
C.
D.
12. 机器人结构中,起着支撑作用的部件是
A. 机座
B. 机体
C. 腰部
D. 臂部
13.关于齿轮,下列说法不正确的是
A. 大齿轮带动小齿轮,升速。
B. 小齿轮带动大齿轮,增加扭矩。
C. 小齿轮带动大齿轮,降速。
D. 带动同样的齿轮,不能升速但能降速。
14使用滑轮组工作是因为它能 A. 省力当但不能改变力的方向
B. 能改变力的方向但不能省力
C. 既能改变力的方向又能省力
D. 以上答案都不对
15.下图中,沿着哪个斜面向上拉动小车最省力
A. A
B. B
C. C
D. D
16.关于力臂,下列说法正确的是
A. 支点到动力作用点的距离叫动力臂
B. 支点到阻力作用点的距离叫阻力臂
C. 支点到力的作用线的距离叫力臂
D. 杠杆的力臂一定在杠杆之上
17. 使用下列简单机械,为了省力的是
A. 龙舟比赛用的船桨
B. 开瓶用的瓶起子
C. 理发用的剪刀
D. 旗杆顶的定滑轮
19. 在下列日常生活中用到的工具中,具有传动链的是
A. 电视机
B. 自行车
C. 滑板车
D. 缝纫机
20. 下列图片中,哪个不是机器人
A.
B.
C.
D.
21.
动画片《熊出没》中,光头强用来砍树的电锯具有下列哪种结构
A. 传动链
B. 皮带
C. 手枪
D. 帽子
22. 日常生活或生产实践中使用的机械,能抽象为斜面的是
A. 汽车方向盘
B. 吊杆
C. 盘山公路
D. 门把手
23. 下列说法不正确的是
A. 利用机械既可以减轻体力劳动,又可以提高工作效率
B. 杠杆是一种简单的机械,杆的形状可以是直的,也可以是弯曲的
C. 滑轮是属于杠杆变形的一种简单机械
D. 以上说法均不正确
24. 链传动相比齿轮传动的优点是?
A. 可以在两轴中心相距较远的情况下传递运动和动力。
B. 提高转速。
C. 增加动力。
D. 齿轮传动都具有链传动所有优点。
25.
如图所示,不计滑轮重及摩擦,分别用力F1、F2匀速提升同一重物,则关于力F1、F2的大小关系描述正确的是
A.
F1=F2
B.
F1<F2< p=""></F2<>
C.
F1>F2
D. 不确定
28. 关于简单机械,下列说法不正确的是
A. 起重机的起重臂是一个杠杆
B. 省力的机械一定会省距离
C. 定滑轮、动滑轮和轮轴都是变形的杠杆
D. 使用轮轴不一定会省力
29.
下图所示的机器人“大白”是哪部电影中的角色
A. 《机器人9号》
B. 《超能陆战队》
C. 《功夫熊猫》
D. 《哆啦A 梦》
30.
如下图所示为自行车链传动机构,在骑自行车的过程中,关于两个链轮的说法错误的是
A. 两个链轮的转向相同
B. 大链轮的转速较大
C. 大链轮是主动轮
D. 小链轮是从动轮
二、多选题(共5题,每题4分,共20分)
31. 在日常生活中,常用的轮轴有
A. 水龙头
B. 水杯
C. 刻度尺
D. 方向盘
32. 关于机器人,下列说法正确的是
A. 机器人是一种具有高度灵活性的自动化机器
B. 与普通机器相比,机器人具备一些与人或生物相似的智能能力
C. 机器人可以代替人类做很多枯燥乏味的流水线工作
D. 只有外表看起来像“人”的机器才能被称作机器人
33. 下列电影与机器人有关的是
A. 机器人总动员
B. 大鱼海棠
C. 人工智能
D. 白雪公主
34. 三角形具有稳定性,有着稳固、坚定、耐压的特点。
下列事物中用到了三角形稳定性
A. 埃及金字塔
B. 钢轨
C. 屋顶
D. 起重机
35. 下列生活用品中,属于费力杠杆的是
A. 开瓶器
B. 筷子
C. 镊子
D. 核桃钳
试题编号:201612
试题类型:多选题
三、判断题(共10题,每题2分,共20分)
37. 把轮轴看作杠杆,则半径一定是动力臂。
正确错误
38.
只有人型的机器人才能被称为“机器人”。
正确错误
39.
有一对传动齿轮,已知主动轮的转速n1=960rpm,齿数Z1=20,从动轮的齿数Z2=50,这对齿轮的传动比i12=2.5,那么从动轮的转速应当为n2=2400rpm。
正确错误
40. 轮轴的轮越大越省力。
正确错误
36.
力学之父阿基米德说过:“假如给我一个支点,我就能推动地球”,这句话非常形象的描述了斜面省力原理。
正确错误
41. 电影《机器人总动员》是日本制作的。
43. 使用斜面能省力。
正确 错误
44. 螺丝钉是应用了斜面能省力的原理制成的。
正确 错误
45. 当一个物体受力,要在另一个物体表面上移动时,轮子可以减少摩擦力,使物体能够在其表面上移动较长距离。
正确 错误
正确 错误
42. 螺丝刀是只应用了斜面原理制成的。
正确 错误。