迷宫小车
小汽车红绿灯迷宫教案

小汽车红绿灯迷宫教案活动目标1.知道汽车、行人在马路上行走要遵守交通规则,听从红绿灯的指挥。
2.能根据信号做动作。
3.体验模仿游戏的快乐。
4.知道红绿灯的作用。
5.让幼儿了解一些危险因素,懂得如何保护自己。
教学重点难点感知交通常识一过马路,红灯停,绿灯行。
活动准备1.卡片红灯、绿灯各个,两辆玩具小汽车。
2.设置马路场景。
活动过程一、导入,引起幼儿兴趣。
1.师:看看,今天老师给小朋友们带来了什么?(教师出示两辆玩具汽车)2.教师示范,将两辆汽车成十字形相向开来,让幼儿观察发生了什么事。
(汽车相撞)3.师:刚刚发生了什么事? (幼儿回答)二、认识红绿灯。
1.为了避免刚刚的交通事故发生,我们请来了这两位朋友来帮忙。
(出示红绿灯卡片)2.师:有谁认识这两位朋友吗? (幼儿回答)3.师:那有哪位小朋友知道红绿灯的作用呢? (幼儿回答)4.教师总结:汽车和行人在马路.上行走时,要听从红绿灯的指挥,红灯亮了停一停,绿灯亮了才能行。
三、小汽车按规则行驶。
1.师:现在我们让汽车安全行驶一次。
(教师按照自己给出的信号作汽车,如:出标红灯,说红灯我就停,出示绿灯,说绿灯我就行。
)2.教师作汽车,幼儿给出信号。
四、游戏。
1.师:现在我们也来开汽车,好不好?2.请两个小朋友来当红绿灯,一部分小朋友当汽车。
3.幼儿做游戏,教师在旁指导。
五、游戏结束,教师再次总结。
教学反思本节活动主要是从幼儿的兴趣引导,先激发幼儿兴趣,从而认识事物,在参与到游戏中领悟。
活动中幼儿积极参与,学习氛围浓厚,大部分幼儿都能在玩中认识到遵守交通的重要性。
不足的地方就是,有一小部分幼儿只注重于玩的过程,而没能在过程中认识到游戏的真正意义。
所以,如果再重新上这节课,我会在游戏中多让幼儿讨论,让他们自己去倾听领悟。
幼儿园托班小车迷宫教案

幼儿园托班小车迷宫教案教案主题:幼儿园托班小车迷宫教学教学目标:1. 帮助幼儿培养观察能力和动手能力,提高解决问题的能力。
2. 培养幼儿的团队协作意识,提高社交能力。
3. 培养幼儿的自信心和勇气。
教学内容:1. 基本介绍迷宫和小车。
2. 小车在迷宫中寻找出口的方法。
教学准备:1. 迷宫模型2. 小车模型教学过程:1. 基本介绍迷宫和小车。
首先,让幼儿们看一下迷宫模型,包括出口、入口和迷宫的路线。
然后简单介绍小车模型,告诉孩子们我们要帮忙小车找到出口,但是小车只能沿着迷宫的路走。
2. 小车在迷宫中寻找出口的方法。
把孩子们分成几个小组,每个小组有一个小车和一个迷宫模型。
然后告诉孩子们应该如何操作小车,在迷宫里寻找出口。
可以告诉孩子们一些技巧,比如怎样先走直线,然后转弯。
讲解过后,让孩子们自己操作小车,看看能不能将小车驶出来。
在这个过程中,老师需要引导孩子们去想象,鼓励他们思考解决方案。
如果孩子们遇到困难,可以给他们提示。
3. 团队协作与社交能力将小组中的幼儿组合起来,让他们一起来探索迷宫,找寻出口。
在这个过程中,老师需要引导孩子们彼此之间互相帮忙、鼓励,并教育他们坚持不懈、共同合作,能够战胜任何困难。
4. 勇气和自信心如果孩子们在操作小车时遇到失败了,老师要及时给他们鼓励,并告诉他们失败不代表一切。
让他们安心再次操作小车,并告诉他们坚持不带来绝望,最终他们一定能够找到出口。
教学总结:通过这个活动,孩子们学到了如何去解决问题、如何去合作,并且培养了他们的勇气和自信心。
同时,这个小车迷宫游戏也为幼儿课堂注入了新的色彩,让孩子们更加有趣地学习。
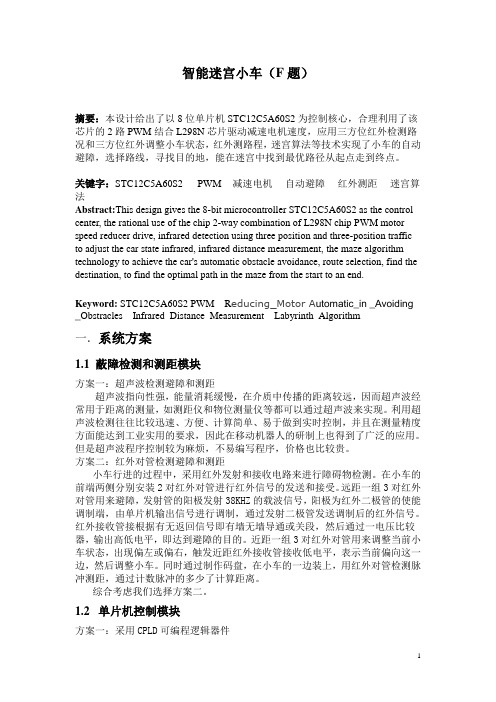
基于ATmega16单片机的迷宫巡线小车研究与设计
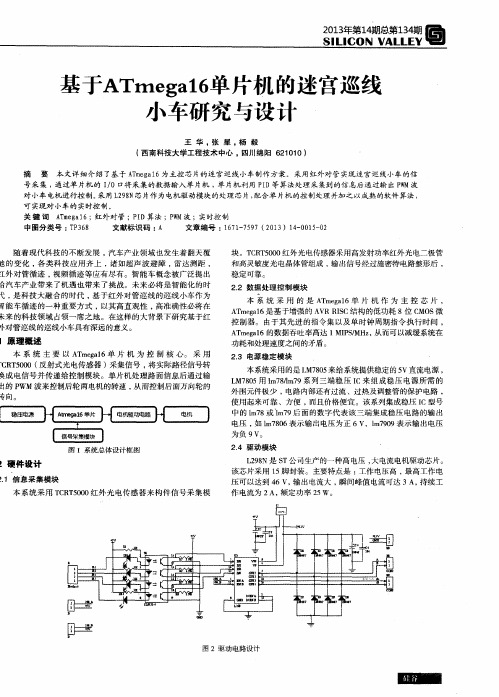
图 1系 统 总体 设 计 框 图
!硬 件设 计
! . 1 信 息采 集模 块
L 2 9 8 N是 s T公 司生 产 的一种 高 电压 , 大电流 电机 驱动 芯 片。
该 芯 片采 用 1 5 脚 封装 。 主要特 点是 : 工 作 电压 高 , 最高 工作 电 压 可 以达 到 4 6 V , 输 出 电流大 , 瞬 间峰 值 电流可 达 3 A, 持 续 工 作 电流为 2A, 额定 功率 2 5 w。
2 0 1 3  ̄ j 1 4 期总第 1 3 4 期
S_ L- C0 N VALLEY
基于AT me g a l 6 单片机 的迷宫巡线 小车研究 与设计
王 华 , 张 星 。 杨 毅
( 西 南 科技 大学 工程技 术 中心 。 四川绵 阳 6 2 1 0 1 0) 摘 要
本文 详 细介 绍 了基 于 A T m e g a 1 6 为 主控 芯 片的 迷 宫巡 线 小车 制作 方案 。采 用红 外对 管 实现 迷宫 巡 线小 车的 信 号采集 , 通过 单 片机 的 I / o口将 采 集的数 据 输入 单 片机 , 单 片机 利 用 P I D等 算 法处 理采 集到 的信 息后 通 过输 出 P W M波 对 小 车 电机 进行 控 制 。 采用L 2 9 8 N 芯片作 为 电机驱 动模 块 的处 理芯 片 , 配合单 片机 的控 制 处理并 加之 以 成熟 的软件 算法 ,
随 着现 代 科 技 的不 断 发展 , 汽 车产 业 领 域 也发 生 着 翻天 覆 也的变 化 , 各 类 科技 应 用 齐上 , 诸 如超 声 波 避 障 , 雷 达测 距 , 工 外对管循迹 , 视频 循 迹 等 应有 尽 有 。智 能 车 概念 被 广 泛提 出 合 汽 车 产 业 带来 了机 遇也 带 来 了挑 战。未 来 必 将是 智 能 化 的时 弋, 是 科技 大 融 合 的 时代 , 基 于 红 外对 管 巡 线 的巡 线 小 车作 为 能 车 循 迹 的一 种 重要 方 式 , 以其 高 直观 性 , 高准 确 性 必将 在 来 的科 技 领域 占领 一席 之 地 。在 这 样 的大 背 景下 研 究 基于 红 『 } 对管 巡线 的巡线 小车 具有 深远 的意义 。
幼儿园迷宫操作方法

幼儿园迷宫操作方法
1.准备工作
将迷宫板放在平坦的桌面或地上,把迷宫道具按照题目要求摆放好。
2.游戏目标
根据题目要求,使小球或者小车从起点走到终点,不触碰到迷宫的墙壁。
3.游戏规则
玩家通过手把迷宫板倾斜来控制迷宫中的小球或小车运动,不要将球或车掉入“陷阱”或碰到“障碍”。
当小球或小车到达终点后,游戏成功,可以开始下一关,否则需要重新开始。
4.游戏技巧
(1)观察题目要求,清楚起点和终点,找出可行的路线,避免无用的尝试。
(2)通过倾斜迷宫板控制小球或小车的方向,注意不要过度力度,以免球或车掉出迷宫。
(3)注意观察迷宫中的墙壁和“陷阱”,避免路线错乱或掉入“陷阱”。
5.游戏结束
当小球或小车到达终点后,游戏成功,可以进行下一关,或者结束游戏。
如果中途游戏失败,可以重新开始。
幼儿园编程教育教案:用图形编程小车走迷宫

幼儿园编程教育教案:用图形编程小车走迷宫教学主题:用图形编程小车走迷宫教学对象:幼儿园小班、中班、大班教学时间: 1课时(40分钟)教学目标:1.了解图形编程的概念。
2.熟悉Scratch软件的界面和操作方式。
3.学习如何使用Scratch软件进行图形编程。
4.完成小车走迷宫的程序设计。
教学内容:1.图形编程概念介绍。
2.Scratch软件界面和操作方式。
3.如何使用Scratch进行图形编程。
4.小车走迷宫程序设计。
教学方法:1.讲授结合练习相结合的教学方法。
2.小组合作探究教学方式。
教学过程:一、导入(5分钟)1.老师向学生们简要介绍今天的学习内容:用图形编程小车走迷宫。
2.老师向学生们提出问题:你们知道什么是图形编程?有没有用过Scratch软件?你们来和大家分享一下。
二、讲授图形编程(10分钟)1.老师讲解什么是图形编程,为什么要学习图形编程,并分享使用图形编程编写出来的成果。
2.讲解Scratch软件界面和操作方式,让学生们熟悉Scratch软件。
三、探究图形编程(15分钟)1.按照老师提供的范例,学生们在小组中使用Scratch软件探究图形编程的功能,记录新发现和心得体会。
2.学生们进行小组间的交流,分享自己所学到的新知识和心得。
四、程序设计(10分钟)1.老师向学生们介绍小车走迷宫程序设计的思路和操作步骤。
2.学生们根据老师的指导,将所学的图形编程知识和Scratch软件操作方法,编写出小车走迷宫的程序。
五、展示和评价(5分钟)1.学生们将自己编写的小车走迷宫程序展示给全班。
2.全班同学根据自己的喜好和需要,评价所展示的小车走迷宫程序。
教学反思:本次教学通过讲解、探究、实践的方式引导学生了解图形编程的概念,熟悉Scratch软件的界面和操作方式,并成功地编写出了小车走迷宫的程序。
在教学中,让学生自主学习、探究和交流,让学生在积极的氛围中学习和掌握图形编程的技能。
教学效果比较显著。
小车走迷宫程序
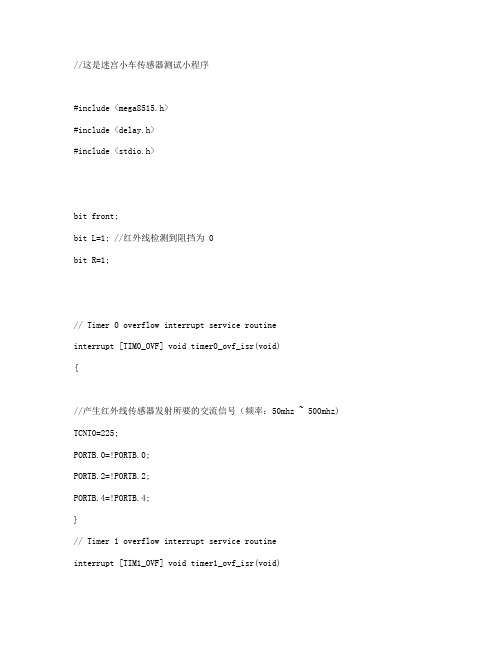
//这是迷宫小车传感器测试小程序#include <mega8515.h>#include <delay.h>#include <stdio.h>bit front;bit L=1; //红外线检测到阻挡为 0bit R=1;// Timer 0 overflow interrupt service routineinterrupt [TIM0_OVF] void timer0_ovf_isr(void){//产生红外线传感器发射所要的交流信号(频率:50mhz ~ 500mhz) TCNT0=225;PORTB.0=!PORTB.0;PORTB.2=!PORTB.2;PORTB.4=!PORTB.4;}// Timer 1 overflow interrupt service routineinterrupt [TIM1_OVF] void timer1_ovf_isr(void){//检测装在PB.5口上的传感器if(PINB.5){ R=0; PORTA=0xff; }if(PINB.1){ L=0; PORTA=0xff; }}/*******************************************// 蜂鸣器BB程序*/////////////////////////////////////////// void buzzer(void){ unsigned int i=512;for(;i--;) { PORTB.3=!PORTB.3; delay_us(250); } }/*******************************************// 小车“杀车”程序*/////////////////////////////////////////// void black(void){PORTD.6=!PORTD.6;PORTD.4=!PORTD.4;delay_ms(30);OCR1AL=0; OCR1BL=0;delay_ms(100);}/*******************************************// 小车启动子程序// speed=0~255 0为停止走动// front=1 ,向前 front=0, 向后*////////////////////////////////////////////// void RUN(unsigned char speed){ OCR1AL=speed;OCR1BL=speed;if (front) {PORTD.6=1; PORTD.4=1; }else { PORTD.6=0; PORTD.4=0; }}/*********************************************//转圈子程序// p=‘R’垂直右转,p='L' 垂直左转,// p='r' 以右轮为支点右转,p='l'以左轮为支点左转// m转向数值*//////////////////////////////////////////////// void L_R(unsigned char p,unsigned char m){ unsigned char a_temp, b_temp;switch ( p ){case 'R' : { PORTD.6=1; PORTD.4=0; while (m--)delay_ms(10); break; } case 'L' : { PORTD.6=0; PORTD.4=1; while (m--)delay_ms(10); break; } case 'r' : { PORTD.6=1; PORTD.4=0;OCR1AL=0x00; while (m--)delay_ms(10); break; }case 'l' : { PORTD.6=0; PORTD.4=1;OCR1BL=0x00; while (m--)delay_ms(10); break; }}black();OCR1AL=a_temp; OCR1BL=b_temp;}void test232(void){ //unsigned char i;putchar(0x0d);putchar(0x0a);putchar(0x0d);putchar(0x0a);putsf("***********************************************\r");putsf("* RB-101 机器人测试程序 *\r");putsf("* *\r");putsf("* 逻辑电子DIY 机器人制作天地 *\r");putsf("* *\r");putsf("* 简易灭火测试 *\r");putsf("***********************************************\r");//putsf("按任何一个键继续\r");//i=getchar();//putchar(i);putchar(0x0d);putchar(0x0a);}void main(void){PORTA=0x00;DDRA=0xff; //打开七段数码管,全部点亮PORTB=0x00;DDRB=0B00011101; //设置红外线传感器端口PORTC=0x00;DDRC=0xff;PORTD=0b01010000;DDRD=0b01110000;PORTE=0x00;TCCR0=0x04;TCNT0=0x00;OCR0=0x00;TCCR1A=0xA1;TCCR1B=0x03;TCNT1H=0xff;TCNT1L=0xff;OCR1AH=0x00;OCR1AL=0x00;OCR1BH=0x00;OCR1BL=0x00;// External Interrupt(s) initialization// INT0: Off// INT1: Off// INT2: OffMCUCR=0x00;EMCUCR=0x00;// Timer(s)/Counter(s) Interrupt(s) initialization// USART initialization// Communication Parameters: 8 Data, 1 Stop, No Parity// USART Receiver: On// USART Transmitter: On// USART Mode: Asynchronous// USART Baud rate: 9600UCSRA=0x00;UCSRB=0x18;UCSRC=0x86;UBRRH=0x00;UBRRL=0x1A;// Analog Comparator initialization// Analog Comparator: Off// Analog Comparator Input Capture by Timer/Counter 1: Off // Analog Comparator Output: OffACSR=0x80;#asm("sei")//打开所有的前后LEDPORTB.6=1;PORTB.7=1;PORTC.6=1;PORTC.7=1;delay_ms(1000);PORTA=0;test232();buzzer(); //蜂鸣器 delay_ms(100);buzzer();delay_ms(1000);front=1; //前进RUN(255); //开始行走 delay_ms(1000);L=R=1;while(1){ while(R*L);if(!L) L_R('L',50);if(!R) L_R('R',50); RUN(255);R=1;L=1;PORTA=0;#asm("wdr");}// run(0); //停止。
幼儿园创意编程天地:图形编程小车走迷宫教学案例

幼儿园创意编程天地:图形编程小车走迷宫教学案例随着现代科技的迅猛发展,编程教育已经成为了教育界的热门话题之一。
越来越多的学校和机构开始注重培养学生的编程能力,而幼儿园作为学生教育的起点,也在不断尝试着将编程教育融入到幼儿教学中,以培养孩子们的逻辑思维能力和创造力。
而图形编程小车走迷宫教学作为一种创意编程教学方法,正在引起越来越多幼儿园的关注和实践。
1. 初识编程幼儿园是孩子们的乐园,而在这样一个充满童真和好奇心的地方,引领孩子们初识编程无疑是一项极富创意和思考的工作。
而图形编程小车走迷宫教学正是一种引导幼儿初识编程的切入点。
这种教学方法通过以有趣的方式引导孩子们解决问题,培养他们的逻辑思维和动手能力,同时也为他们打开了编程的大门,激发了孩子们对编程的兴趣。
2. 图形编程小车走迷宫在幼儿园创意编程天地中,图形编程小车走迷宫无疑是一个颇具魅力的活动。
在这个教学案例中,孩子们将通过编程操控小车,让它按照特定的路径走出迷宫。
这不仅培养了孩子们对空间和方向的认知能力,更重要的是,通过创意编程教学,孩子们可以在动手实践中感受编程的乐趣,同时也能锻炼他们的逻辑思维和问题解决能力。
3. 案例分析在图形编程小车走迷宫教学案例中,老师可以先通过讲解迷宫的结构和小车的控制原理,引导孩子们思考如何让小车走出迷宫。
老师可以带领孩子们使用图形编程软件,通过拖拽和组合编程模块,让小车按照他们设计的路径行进。
在这个过程中,孩子们需要思考每一步的行动,培养他们对问题的分析和解决能力。
当小车成功走出迷宫时,孩子们会获得成就感和满足感,同时也为他们今后的编程学习打下了良好的基础。
4. 个人观点作为一名幼儿园的文章写手,我深信图形编程小车走迷宫教学案例对于幼儿园编程教育的重要性。
这种教学方法既能培养孩子们的逻辑思维和动手能力,又能在有趣的编程实践中引导孩子们初识编程,激发他们对编程的兴趣。
在幼儿园创意编程天地中,这样的教学案例将会成为一种创意和有趣的教学方式,让幼儿们在快乐中学习,为未来的学习和生活奠定坚实的基础。
迷宫小车记忆功能原理

迷宫小车记忆功能原理Maze cars with memory function are a fascinating and innovative invention that has revolutionized the way we interact with technology. These cars are equipped with sensors and cameras that allow them to map out their surroundings and remember paths they have traveled. This capability opens up a world of possibilities for both entertainment and practical applications.迷宫小车记忆功能是一个迷人而创新的发明,彻底改变了我们与技术互动的方式。
这些小车配备了传感器和摄像头,可以绘制周围环境的地图,记住它们已经走过的路径。
这种能力为娱乐和实际应用打开了无限可能性。
From an entertainment perspective, maze cars with memory function bring a new level of excitement and challenge to traditional maze games. Players can now pit their skills against a car that can remember and adapt to the maze layout, adding a dynamic element to the gameplay. This not only enhances the gaming experience but also encourages strategic thinking and problem-solving skills.从娱乐的角度来看,拥有记忆功能的迷宫小车给传统的迷宫游戏带来了新的刺激和挑战。
小车走迷宫技术

小车走迷宫技术在当今科技迅猛发展的时代,小车走迷宫技术已经成为了研究者们关注的焦点。
小车走迷宫技术的发展不仅仅对人类生活产生了巨大的影响,同时也在智能机器人、自动驾驶等领域有着广泛的应用前景。
本文将探讨小车走迷宫技术的原理、算法和应用。
一、小车走迷宫技术的原理在理解小车走迷宫技术之前,我们需要了解迷宫的定义。
迷宫是一种具有复杂通道和岔道的、用来考验解决者智力的游戏或者谜题。
小车走迷宫技术旨在设计一种算法和控制系统,使得小车能够在迷宫中找到通往终点的路径。
小车走迷宫技术主要依靠传感器、控制器和导航算法来实现。
传感器用于感知迷宫中的环境信息,例如距离、方向、障碍物等。
控制器根据传感器的反馈信息,控制小车的移动、转向等动作。
导航算法则是小车寻找路径的关键,常见的有盲目搜索算法、启发式搜索算法等。
二、小车走迷宫技术的算法1. 盲目搜索算法盲目搜索算法是最简单的迷宫求解算法之一。
它通过遍历迷宫的所有可能路径,逐一检查是否通往终点。
常见的盲目搜索算法有深度优先搜索(DFS)和广度优先搜索(BFS)。
DFS按照深度优先的原则进行搜索,先沿着一条路径一直搜索到底;BFS则按照广度优先的原则进行搜索,先搜索所有可能的下一步选择。
2. 启发式搜索算法启发式搜索算法是一种更加智能化的算法,它不仅考虑当前的状态,还会考虑目标状态。
常见的启发式搜索算法有A*算法和Dijkstra算法。
A*算法通过预测到达目标状态的代价来进行搜索,只选择代价最低的路径进行扩展;Dijkstra算法则根据节点之间的距离来进行搜索,每次选择距离最短的节点进行扩展。
三、小车走迷宫技术的应用1. 智能机器人领域小车走迷宫技术在智能机器人领域有着广泛的应用。
通过搭载小车走迷宫技术,智能机器人可以在复杂的环境中自主探索、寻找目标物体或者执行任务。
例如,可将智能机器人应用于家庭服务机器人,让其能够快速找到指定物品,提高生活效率。
2. 自动驾驶领域小车走迷宫技术对自动驾驶也有着重要意义。
迷宫智能小车A题

迷宫智能小车【A题】【本科组】一、任务设计并制作电动小车,实现小车在迷宫走循迹功能,迷宫中跑道铺设成白色,挡板也为白色,档板高度约为10cm,跑道两个挡板之间的等间距,为25厘米,在出口处的黑胶带宽为1.5厘米。
迷宫如下图所示。
黑胶袋二、要求1.基本要求(1)为表示竞赛的公平性,竞赛前评委可任意摆放挡板,改变迷宫。
(2)小车需三次进入跑道,第一次和第二次为路径试跑,第三次为路径择优。
路径试跑:迷宫分左右两个赛道,小车从入口进入(车体不能进入跑道,上电后垂直进入跑道),经过挡板迷宫区,能够找到出口,在出口处有一条黑线,小车识别到黑线后停止在出口处。
小车如上试跑两次(左右赛道各一次)。
路径择优:经过前面的两次试跑,小车应适当记忆所走路径,并且做出分析,得出最优路径(即两次试跑的最短路程),并按此路径进行第三次行驶。
最后停止在出口处。
(3)小车进入迷宫后尽量不要走入死胡同,如果走入要能顺利退回。
2.发挥部分(1)小车在5分钟内完成2次试跑,将小车取出和放回时间除去。
(2)记录小车第三次进入跑道并行完全程的时间,时间越短越佳。
(3)记录小车第三次进入跑道所走的路线,路经越短越佳。
(4)其他。
三、说明(1)小车统一提供,可以进行改装。
(2)小车电池自备,要求不超过8节1.2伏电池。
(3)小车在运行中出现故障,允许重新试跑一次。
(5)比赛工程中,每次小车进入跑道都将进行计时。
(4)设计报告正文中应包括系统总体框图、核心电路原理图、主要流程图、主要的测试结果。
完整的电路原理图、重要的源程序和完整的测试结果用附件给出。
四、评分标准简易数字存储示波器的设计【B题】【本科组】一、任务设计并制作一台具有实时采样方式的数字示波器,示意图如图1所示。
图1 数字示波器示意图二、要求(1)被测周期信号的频率范围为1Hz~10MHz,仪器输入阻抗为1M ,显示屏的刻度为8 div×10div,垂直分辨率为8bits,水平显示分辨率≥20点/ div。
幼儿园编程魔法师:图形编程小车探秘迷宫教学案例
幼儿园编程魔法师:图形编程小车探秘迷宫教学案例「幼儿园编程魔法师:图形编程小车探秘迷宫教学案例」在当今数字化的社会中,编程教育已经不再是高中或大学的专业课程,而是被渗透到了幼儿园的教学中。
幼儿园编程教育作为一门新兴的教学科目,吸引了众多家长和教育者的关注。
这其中,图形编程小车探秘迷宫教学案例作为一种新型的教学方法备受瞩目。
一、图形编程小车探秘迷宫教学案例的意义1.1 促进幼儿思维发展图形编程小车探秘迷宫教学案例能够激发幼儿的思维,培养其逻辑思维和空间想象能力。
在探索迷宫的过程中,幼儿需要进行思考和推理,培养解决问题的能力。
1.2 训练幼儿合作与沟通能力这种教学案例需要幼儿进行团队合作,共同思考并解决问题。
通过合作学习,幼儿可以培养相互协作的能力,提高沟通和团队协作的能力。
1.3 培养幼儿兴趣和动手能力图形编程小车探秘迷宫教学案例通过实际操作,激发了幼儿对编程和科技的兴趣,培养了他们的动手能力。
二、图形编程小车探秘迷宫教学案例的实施过程2.1 准备教学器材为了实施图形编程小车探秘迷宫教学案例,首先需要准备相应的教学器材,如图形编程小车、迷宫模型等。
2.2 设计教学活动在教学活动中,需要设计丰富多彩的任务和活动,激发幼儿的学习兴趣。
设计不同难度的迷宫,让幼儿利用图形编程小车进行探索。
2.3 引导幼儿进行探索在教学过程中,老师需要引导幼儿进行探索,例如提出问题、鼓励幼儿进行思考和讨论,激发他们的学习热情。
同时要提供适当的帮助和引导,确保幼儿能够顺利完成任务。
三、图形编程小车探秘迷宫教学案例的个人观点和理解在实施图形编程小车探秘迷宫教学案例的过程中,我深切感受到了它带来的积极影响。
幼儿在探索迷宫的过程中,不仅能够培养思维逻辑能力,还能够在实践中掌握编程知识。
通过团队合作,幼儿们学会了互相倾听、合作解决问题,培养了他们的团队意识和沟通能力。
这种教学活动让幼儿在快乐中学习,激发了他们对科技的兴趣,为将来的学习打下了良好的基础。
智能迷宫小车设计方案

sbit P2_1=P2^1; //中右传感器
sbit P2_2=P2^2; //中间传感器
sbit P2_3=P2^3 //中间传感器
sbit P2_4=P2^4; //左侧传感器
turn1=P2|0xE0; //P2 用于检测路线 0xE0 屏蔽高位
switch(turn1)
{//寻线模块//
case 0xE4: advance(1)
黑 龙 江 科 技 大 学 center311 Lab 2 制 作 实 验 室 学生组 设 计
我们采用了五个传感器
前端三个为寻线,左右两个为路口检测
用三个传感器中间的在线上两侧分别骑线这样便于快速校正小车位置,而且中间传感器还用
于 90 度转弯时小车头部位置的确定。
寻线程序:
sbit P2_0=P2^0; //右侧传感器
***************电机选择及问题分析:*************** 电机为网上购买 220r/min 存在问题: 1 速度过快 2 采用蓄电池 惯性较大 3 两轮速度不均 右侧轮速度较慢 解决: 综上原因我们采用 pwm 调速,降低速度减小惯性影响,双 pwm 调速平衡两轮速度 pwm 采用 T0 定时器 工作模式 2 自动重载模式 (详细程序见 .c) 晶振 11.0592 TH0=0x9B
黑 龙 江 科 技 大 学 center311 Lab 2 制 作 实 验 室 学生组 设 计
总体设计
作品简介: 作品硬件主要分为 5 个模块:传感器模块、电机驱动模块、电源及稳压模块、主控模 块、车体框架。 软件部分:采用 C 语言编写
软件主要部分包括: (1)寻线函数 (2)pwm 调速函数 (3)1602 显示函数 (4)路口判断与记录函数 (5)最优路劲计算函数 (6)直角平角转弯函数 (7)时间记录函数 ****************传感器选择**************
迷宫小车系统的设计论文文
目录摘要 (3)ABSTRACT (3)1. 绪论 (4)1.1迷宫小车的作用与意义 (4)1.2迷宫小车的发展现状 (4)2. 设计任务及要求 (4)2.1 设计任务 (4)2.2 技术基本要求 (5)3. 系统方案的论证 (5)3.1单片机控制模块 (5)3.2电机控制模块 (5)3.3光电监测模块 (6)3.4显示模块 (6)4. 总体设计方案 (7)4.1系统模块 (7)4.2系统方案 (7)5. 硬件电路设计 (7)5.1电动机驱动模块的电路设计与实现 (7)5.2单片机控制模块的电路设计与实现 (8)6. 系统的软件设计 (8)6.1程序流程框图 (10)6.2光电检测程序 (10)6.3电机转动程序 (12)6.3.1电机前进程序 (12)6.3.2电机后退程序 (12)6.3.3电机左转程序 (12)6.3.4电机右转程序 (12)6.3.5电机停止程序 (12)6.4显示程序 (13)7. 系统测试与分析 (13)7.1测试工具 (13)7.2测试结果 (14)参考文献 (15)附录 (16)致谢 (22)迷宫小车系统设计***物理与电子信息学院电子信息工程专业06级指导教师:赖**摘要:设计了一个基于单片机控制的迷宫小车系统。
该系统采用AT89S52单片机为主控制核心,实现信号采集,路线判断,行驶总时间的显示,以控制小车的运动;利用光电开关感应墙体的存在,结合L298N芯片驱动减速电机运转,从而实现小车走迷宫。
该系统有单片机控制模块和光电监测模块两个主要功能模块。
单片机控制模块主要利用单片机接受到光电开关输出的高低电平后再输出信号去控制小车的运动;光电监测模块则利用光电传感器对墙体的感应,然后输出相应的高低电平并传送给单片机。
这样就可以实时监测小车在迷宫中所处的位置,并进行相应的运动,最终经判断让小车停止在迷宫出口指定的位置上。
关键词:单片机;电机驱动;光电开关The System Design of Maze Trolley SystemYi YinxueSchool of Physics and Electronic Information, Grade 2006, Instructor:LaiChunhongAbstract:Microcontroller AT89S52 is used to this maze trolley system to achieve signal acquisition ,line judge and the display of the driving total time.The principle of this system is that use photoelectric sensors which senses the presence of wall combined with the L298N chip to drive the DC Motor,achieve the purpose of making the trolley move and locate, Then achieve the goal that trolley move in the maze!This system composed of modules such as SCM Control Module,Photoelectricity Monitoring Module,and so on.The SCM Control Module uses the SCM to output singnal after receiving the high-low output of photoelectric switches in order to control the move of trolley. Then the Photoelectricity Monitoring Module uses photoelectric sensors to judge the presence of wall ,then output corresponding high-low voltage to transmit to the microcontroller .This allows real-time monitoring of car position in the maze, and the corresponding movement,at last achieve the goal of making the trolley stop at the specified location.Key word: microcontroller; motor drive; photoelectric switch1. 绪论1.1迷宫小车的作用与意义进入21世纪,伴随着电子、信息技术的应用与迅速普及,人们对电子技术的要求越来越高。
迷宫避障小车课程设计

迷宫避障小车课程设计一、课程目标知识目标:1. 让学生理解迷宫避障小车的基本原理,掌握相关的物理知识,如力与运动的关系、电路的基本原理等。
2. 学会使用并掌握编程软件,实现对小车运动路径的控制。
3. 掌握迷宫的构建方法,了解不同类型迷宫的特点。
技能目标:1. 能够运用所学的物理知识和编程技能,独立设计和制作一个迷宫避障小车。
2. 提高学生的动手能力,培养实际操作和解决问题的能力。
3. 培养学生团队协作能力,通过分组完成任务,提高沟通与协作水平。
情感态度价值观目标:1. 培养学生对科学技术的热爱,激发学习兴趣,提高探索精神。
2. 培养学生面对挑战时的坚持与毅力,学会克服困难,勇于尝试。
3. 增强学生的自信心,通过完成课程任务,感受到成功的喜悦。
分析课程性质、学生特点和教学要求:本课程属于综合实践活动课程,结合了物理、信息技术等多学科知识。
学生处于初中阶段,好奇心强,具有一定的动手能力和探究精神。
教学要求注重实践操作,培养学生的创新能力和实际应用能力。
二、教学内容1. 理论知识:- 迷宫避障小车的基本原理,涉及力学、电学等基础知识。
- 编程控制原理,包括编程语言基础、逻辑判断与循环结构。
- 迷宫设计原理,介绍不同类型的迷宫特点及设计方法。
2. 实践操作:- 小车组装,包括电机、传感器、电池等组件的安装与调试。
- 编程实践,利用编程软件编写控制小车运动的程序代码。
- 迷宫搭建,根据设计原理,分组搭建不同难度的迷宫。
3. 教学大纲安排:- 第一阶段:理论知识学习,包括小车原理、编程基础、迷宫设计原理,共计4课时。
- 第二阶段:实践操作,分为小车组装、编程实践、迷宫搭建,共计8课时。
- 第三阶段:成果展示与评价,每组展示作品,分享设计过程,共计2课时。
教学内容与教材关联性:本课程内容与初中物理、信息技术等学科教材相关章节紧密结合,如物理学科的力与运动、电学基础,信息技术学科的编程基础等。
通过本课程的教学,使学生能够将所学知识应用于实际操作中,提高综合运用知识的能力。
幼儿园中班科学教案《小车迷》含反思

幼儿园中班科学教案《小车迷》含反思一、教学内容本节课选用幼儿园科学教材《小车迷》一章,内容主要包括认识不同类型的小车,了解小车的基本构造以及小车运动原理。
二、教学目标1. 让学生了解并认识各种类型的小车,提高观察和认知能力。
2. 帮助学生理解小车的基本构造和运动原理,培养学生的动手操作能力。
3. 培养学生合作学习的意识,提高团队协作能力。
三、教学难点与重点重点:认识各种类型的小车,了解小车的基本构造和运动原理。
难点:理解小车的运动原理,能够运用所学知识解释小车的运动。
四、教具与学具准备教具:小车模型、图片、视频等。
学具:小车拼图、画笔、彩纸等。
五、教学过程1. 实践情景引入:让学生观察周围的小车,引导学生关注小车的外观和运动。
2. 知识讲解:展示小车图片和视频,引导学生认识各种类型的小车,讲解小车的基本构造和运动原理。
3. 例题讲解:以小车拼图为例,引导学生动手操作,讲解小车各部分的作用和运动原理。
4. 随堂练习:让学生分组合作,制作小车模型,观察小车运动,巩固所学知识。
六、板书设计小车迷1. 小车的类型2. 小车的基本构造3. 小车的运动原理七、作业设计1. 观察周围的小车,描述小车的外观和运动。
答案:略2. 制作小车模型,观察小车运动,并解释小车运动原理。
答案:略八、课后反思及拓展延伸本节课通过实践情景引入,让学生关注小车的外观和运动,激发学习兴趣。
在知识讲解环节,通过展示小车图片和视频,引导学生认识各种类型的小车,讲解小车的基本构造和运动原理。
例题讲解环节,以小车拼图为例,引导学生动手操作,讲解小车各部分的作用和运动原理。
随堂练习环节,让学生分组合作,制作小车模型,观察小车运动,巩固所学知识。
课后,学生可以继续观察周围的小车,了解小车的运动原理,也可以尝试制作更多类型的小车,提高动手操作能力。
在下一节课中,可以结合本节课所学内容,进行小车比赛,培养学生的团队协作能力和竞争意识。
重点和难点解析一、教学内容《小车迷》一章,内容主要包括认识不同类型的小车,了解小车的基本构造以及小车运动原理。
智能迷宫小车
{CCAP0L = CCAP0H = 0X1b;
Delay(170);
CCAP0L = CCAP0H = PWM0LEFT;
}
}
else//当墙壁很少的地方时,利用远距红外,是小车贴墙走
{if(L_LED&(!R_LED))
Keyword:STC12C5A60S2 PWMReducing_MotorAutomatic_in _Avoiding _Obstracles Infrared_Distance_Measurement Labyrinth_Algorithm
一.系统方案
1.1蔽障检测和测距模块
方案一:超声波检测避障和测距
综合考虑我们选择方案二。
1.2单片机控制模块
方案一:采用CPLD可编程逻辑器件
利用CPLD可编程逻辑器件作为主控制器。CPLD可实现各种复杂的逻辑功能,规模大、密度高、稳定性高、IO资源丰富、易于进行功能扩展,并可应用EDA软件仿真、调试,适合作为大规模控制系统的控制核心,但迷宫小车系统并没有复杂的逻辑运算,且数据处理速度的要求也不高,不能完全发挥CPLD的优势,同时,由于其集成度较高,硬件成本偏高,同时由于芯片引脚较多,实物硬件电路布线复杂,加重了电路设计和焊接的工作。
方案二:采用STC12C5A60S2
采用STC12C5A60S2单片机作为控制器。该单片机扩展功能强,具有2路PWM,软件编程灵活,自由度大,可通过软件编程实现各种算法和逻辑控制,并具有功耗低、体积小、技术成熟等优点,使其广泛应用于各个电子控制系统,完全能满足本系统的功能需求。
循迹小车项目描述
循迹小车项目描述嘿,朋友们!今天咱来聊聊循迹小车项目。
你想想看,这循迹小车就像是个小小的探险家,在设定好的道路上跑来跑去,多有意思呀!它能沿着特定的线路前进,就好像有一双小眼睛在认路似的。
要搞这个项目,首先得有辆车吧。
这小车可不能随随便便,得精挑细选。
就跟咱挑鞋子似的,得合脚舒服还得耐用。
然后呢,还得给它装上各种小零件,传感器就像是它的小触角,能感知周围的情况。
咱给小车设计路线的时候,那不就跟给小朋友设计游戏路线一样嘛。
得考虑清楚,哪里该拐弯,哪里该加速。
这可不是随便画画就行的,得花心思呢!要是路线设计得不好,那小车跑起来可就磕磕绊绊的啦。
再说说编程吧,这可真是个神奇的东西。
通过编程,咱就能让小车乖乖听话,让它干啥就干啥。
这感觉就像是咱成了小车的指挥官,指挥着它冲锋陷阵。
你说酷不酷?在调试的过程中,那可真是状况百出啊。
有时候小车不听话,乱跑一气,咱就得耐着性子慢慢找问题。
就跟咱修东西似的,得一点点排查,找到那个捣乱的小毛病。
做循迹小车项目可不能着急,得慢慢来。
就像盖房子,得一砖一瓦地垒起来。
要是着急了,说不定就盖出个歪房子啦。
而且这过程中还能学到好多知识呢,什么电子电路啦,编程逻辑啦,都是很有用的东西。
等咱的小车终于能顺顺利利地沿着路线跑啦,那成就感,可别提有多棒啦!就好像自己培养出了一个优秀的小运动员一样。
所以啊,朋友们,别小看这小小的循迹小车项目。
它里面的乐趣和学问可多着呢!咱可以在这个过程中尽情发挥自己的创意和智慧,让小车变得独一无二。
还等什么呢?赶紧动手试试吧,让我们的循迹小车在属于它的赛道上尽情奔跑吧!。
幼儿园中班数学《铺小路》教案:小车穿越迷宫

幼儿园数学教学一直是教学中重要的一部分,而在中班阶段,针对孩子们的数学学习,铺小路这一教学方式引起了很多老师和家长的关注。
下面本文将从以下几个方面介绍铺小路在幼儿园数学中的教学应用,让孩子们通过小车穿越迷宫,感受数学的奥妙与乐趣。
一、铺小路的教学模式及其适用年龄铺小路是一种基于操作的数学教学模式,通过让孩子们手动操作小车穿越迷宫完成任务,来达到数学知识的教学目的。
这一教学方式主要适用于中班段孩子,也就是三到四岁之间的孩子。
在孩子们接触数学知识之前,使用铺小路这一方式可以让孩子们通过实践操作来感受数学奥妙,增强他们对数学学习的兴趣。
二、铺小路教案的编制及教学步骤铺小路教案的编制需要考虑孩子们的实际情况和他们的认知能力。
基于此,本文提供一份中班铺小路教案,供老师们参考。
1、教学目标:让孩子们通过实践操作来认识数字1-10,并思考如何解决问题的方法。
2、教学准备:铺小路教具、数字牌、十字路口牌、迷宫牌、宝藏牌。
3、教学步骤:(1)准备阶段:老师向孩子们展示教具,让他们了解教具的特点和作用。
(2)游戏分组:将孩子们分成小组,每个小组有三到四个孩子,每个小组有一套教具。
(3)游戏开始:老师向每一个小组发放数字牌,并在十字路口设立迷宫,宝藏在迷宫的另一面。
(4)游戏过程:孩子们将数字牌依次铺到迷宫的十字路口之间,并让小车走过这些数字牌,前往迷宫的另一面,找到宝藏。
(5)游戏结束:找到宝藏以后,孩子们可以分享他们的心得体验,并讨论如何更好地完成任务。
三、铺小路教学的优势及其影响铺小路教学让孩子们通过实践操作来接触数学,这样能够更好的增强他们对数学的认识,更好的理解数学知识。
同时,这样的教学方式也能够让孩子们更好地理解和解决问题的方法。
铺小路教学在幼儿园中的数学教育中,起到了非常积极的作用。
在铺小路教学中,老师的指导非常重要。
他们需要引导孩子们寻找解决问题的方法和策略,同时也需要鼓励孩子们思考,让他们尝试不同的方法来达到目标。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(2)了解并熟悉电子元器件工作原理和功能特性。
(3)掌握单片机对编码电机的控制与红外发射与接收的控制。
(4)熟练运用keil软件进行单片机的C语言编程。
1.2
设计的电脑鼠应该具有三种最基本的能力:
拥有稳定、准确、快速的行走能力
能争取判断路结构图如下。
图3.1 硬件电路结构框图
3.1.1
本次课程设计使用的单片机型号为STC89C52的8位单片机。STC89C52是STC公司生产的一种低功耗、高性能CMOS8位微控制器,具有8K在系统可编程Flash存储器。STC89C52使用经典的MCS-51内核,但做了很多的改进使得芯片具有传统51单片机不具备的功能。在单芯片上,拥有灵巧的8位CPU和在系统可编程Flash,使得STC89C52为众多嵌入式控制应用系统提供高灵活、超有效的解决方案。单片机电路图如3.1.1。
相对方位:这是一种与电脑鼠行进方向有关的标记方式,以一个三位的二进制数即可实现标记,分别表示“前”“左”“右”, 以1表示允许(无墙壁),0表示不允许(有墙壁)。
2.3.3
在电脑鼠试跑过程中或在最后冲刺时,需要对部分路径进行“阻断”,即在发现某条路径是死路(只有入口而无出口)时,在该路径的入口处(一般是交叉点)设置标记,即将入口的线路标记由1改为0。
为了记忆迷宫的详细信息,需要对迷宫单元的位置进行线路标记。全迷宫共有8×8个单元组成,可采用二维坐标方式标记,即用每个单元的XY坐标表示,如起点可标记为(0,0),终点为(7,7)。此外,还需要对迷宫单元的可行进方向进行标记,可采用绝对方位或相对方位二种方式。
绝对方位:这是一种与电脑鼠行进方向无关的标记方式,以一个四位的二进制数,分别表示“东”﹑“西”﹑“南”和“北”四个方向。以1表示允许行进(无墙壁),0表示不允许行进(有墙壁)。
左手法则:遇有交叉时,以左边为优先的前进方向,然后是直线方向、右边方向。
中左法则:遇有交叉时,以直线为优先的前进方向,然后是左边方向、右边方向。
与此类似的还有中右法则。
乱数法则:遇有交叉时,取随机值作为前进方向。
向心法则:由于终点在迷宫的中心,遇有交叉时,以向迷宫中心的方向为优先的前进方向。
2.3.2
图3.1.1
3.1.2.
时钟震荡电路作用:时钟电路时微计算机的心脏,它控制着计算机的工作节奏。CPU就是通过复杂的时序电路完成不同的指令功能的。时钟震荡电路图如图
图3.1.2
3.1.3
作用:为单片机系统供能。此充电电路设计通过一个开关控制,当开关拨到SW位置时,系统通过锂电池供能;当开关拨到SW SPOT位置时,系统通过充电线供能,并为锂电池蓄电。供电及充电电路如图3.1.3。
(2)迷宫电脑鼠能够在迷宫中记忆路径。
创建一格8*8的二维数组,初始化其中的数字,迷宫的一格对应二维数组的一个位置,标记的位置代表走过的位置。这样数组中被标记的数字就为迷宫电老鼠走过的路径。
(3)迷宫电脑鼠能够在找到终点坐标并能返回原点。
在迷宫电脑鼠走的过程中,将要到达的单元格的最高四位记录小车到达该单元格方向的反方向,如此利用回溯算法,可知回来的路线的方向。如图2.1。
图2.1
设小车在箭头处,坐标为(p,q)处,map[p][q]=0xf*,小车将要到达坐标为(p,q+1)处,在进入(p,q+1)前,将map[p][q+1]&=0xdf,即map[p][q+1]=0x1101 *,高四位描述了改坐标下方为小车进入方向。由于小车没走一个未走过的格子,就会也只会修改一个方向的信息,因此记录小车进入该格子的方向是唯一的。
记忆路径的能力
总之,电脑鼠的设计目标是:在最短的时间内找到一条通往总店的最短路径,并以最快速度从起点到达终点。
蓝牙遥控部分:用手机使用蓝牙无线连接到小车,通过发送命令遥控小车实现前进、左转、右转、向后转。
2
2.1
(1)迷宫电脑鼠能够在迷宫中随意穿行。
迷宫一格长为18cm,各个转角为90°,然后需要在迷宫中随意穿行,需要迷宫电脑鼠的基本直行,与转向,在其中加入遇到墙时小车的修正,再运用右手法则等算法便可达到初步的在迷宫中随意穿行的目的。
综合课程设计报告
题目:迷宫电脑鼠的设计
二级学院计算机科学与工程学院
专 业计算机科学与技术
班 级112030701
学生姓名李 洋学号11203070314
指导教师黄贤英 刘小洋
时 间2015年1月17日
摘
本次做的迷宫电脑鼠的设计实验中,迷宫电脑鼠可以通过利用传感器识别周围是否有障碍物,来发送信号给单片机,单片机通过下载好的驱动程序调用相关算法控制小车的左右电机,实现小车走转弯、右转弯、直走等一系列动作。迷宫电脑鼠在行走路线走偏了,可以通过检测是否准备碰墙,自动调整行走路线,回到预定路线。该迷宫电脑鼠可以一定的算法,遍历整个迷宫,记录二维8*8的迷宫的坐标信息,通过坐标信息找到终点和找到多条到达终点的路径,并且找到一条最短到达终点的路径,沿路返回起点进行最后的冲刺到达终点。
电脑鼠在一巷道内行走,如果最后无路可走,则该巷为死巷。电脑鼠在任一单元内,可能的行走方向最多只有三个(前、左、右),如果有二个或二个以上的可能行走方向,称为交叉,遇有交叉时,由于有多个可以行走的方向,在行走方向的选择上,可有下面的几种选择法则:
右手法则:遇有交叉时,以右边为优先的前进方向,然后是直线方向、左边方向。
关键词:嵌入式或单片机微控制器,电脑鼠,智能算法,蓝牙,无线遥控
1
1.1
本项目要实现的是用电脑鼠找出迷宫中通往终点的最短路径并以最快速度到达迷宫的终点。
电脑鼠从迷宫起点位置前进,由程序判断通过前视距离探测器探测到的迷宫状况,控制驱动机构前进或转向并记录路径和距离(控制车轮编码器可完成),由于起点位置和终点位置是已知的,虽然不知道具体路径,但通过编写算法程序即可找到最短路径,在重新开始时便可以最快速度从最短路径到达终点。
3、迷宫电脑鼠走到终点所需的时间越短越好,最长应不得超过2分钟。
2.3
2.3.1
探测策略主要有两种:
(1)全迷宫探索策略,即将迷宫的所有单元均搜索一次,从中找出最佳的行走路径。这种策略需要有足够的时间或探测次数,但在IEEE竞赛规则中每场竞赛只有15分钟的时间,因此是不可能的。
(2)部分迷宫探索策略,即在有限的时间或探测次数下,只探测迷宫的一部分,从中找出次最佳的路径,显然只能采用这种策略。
2.2
1、迷宫电脑鼠外形合理,符合8×8迷宫场地需求。迷宫小车如图2.2,迷宫如图2.3
图2.2图2.3
2、迷宫电脑鼠运行稳定,能够正常在迷宫中随意穿行。
在普通的行走中,由于外界原因回使车走离出原来应该有的路线,然后与墙体碰撞,为了使其不要碰撞,左右的1,3传感器感应左右是否有阻碍,在动作里面添加相应的感应函数,做出动作修改,使小车尽量不与墙碰撞。