stm32时钟输出
STM32微控制器寄存器说明
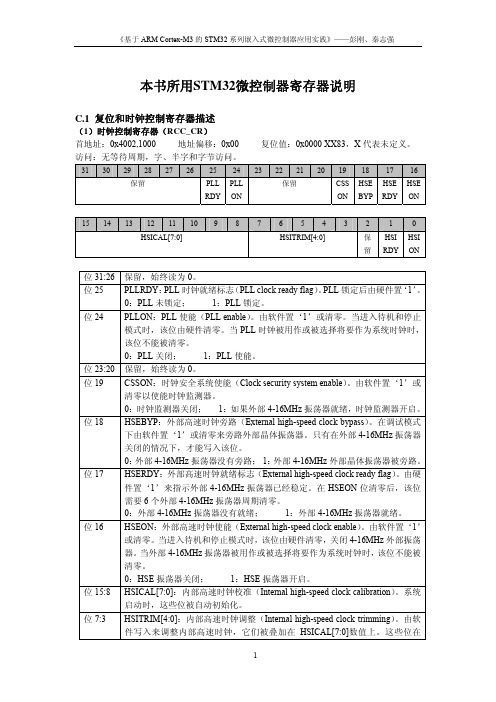
PLLXTPRE:HSE 分频器作为 PLL 输入(HSE divider for PLL entry)。由软件
置‘1’或清‘0’来分频 HSE 后作为 PLL 输入时钟。只能在关闭 PLL 时才能
写入此位。
0:HSE 不分频; 1:HSE 2 分频
PLLSRC:PLL 输入时钟源(PLL entry clock source)。由软件置‘1’或清‘0’
保 HSI HSI
留 RDY ON
位 31:26 位 25 位 24
位 23:20 位 19 位 18
位 17
位 16
位 15:8 位 7:3
保留,始终读为 0。 PLLRDY:PLL 时钟就绪标志(PLL clock ready flag)。PLL 锁定后由硬件置‘1’。 0:PLL 未锁定; 1:PLL 锁定。 PLLON:PLL 使能(PLL enable)。由软件置‘1’或清零。当进入待机和停止 模式时,该位由硬件清零。当 PLL 时钟被用作或被选择将要作为系统时钟时, 该位不能被清零。 0:PLL 关闭; 1:PLL 使能。 保留,始终读为 0。 CSSON:时钟安全系统使能(Clock security system enable)。由软件置‘1’或 清零以使能时钟监测器。 0:时钟监测器关闭; 1:如果外部 4-16MHz 振荡器就绪,时钟监测器开启。 HSEBYP:外部高速时钟旁路(External high-speed clock bypass)。在调试模式 下由软件置‘1’或清零来旁路外部晶体振荡器。只有在外部 4-16MHz 振荡器 关闭的情况下,才能写入该位。 0:外部 4-16MHz 振荡器没有旁路; 1:外部 4-16MHz 外部晶体振荡器被旁路。 HSERDY:外部高速时钟就绪标志(External high-speed clock ready flag)。由硬 件置‘1’来指示外部 4-16MHz 振荡器已经稳定。在 HSEON 位清零后,该位 需要 6 个外部 4-16MHz 振荡器周期清零。 0:外部 4-16MHz 振荡器没有就绪; 1:外部 4-16MHz 振荡器就绪。 HSEON:外部高速时钟使能(External high-speed clock enable)。由软件置‘1’ 或清零。当进入待机和停止模式时,该位由硬件清零,关闭 4-16MHz 外部振荡 器。当外部 4-16MHz 振荡器被用作或被选择将要作为系统时钟时,该位不能被 清零。 0:HSE 振荡器关闭; 1:HSE 振荡器开启。 HSICAL[7:0]:内部高速时钟校准(Internal high-speed clock calibration)。系统 启动时,这些位被自动初始化。 HSITRIM[4:0]:内部高速时钟调整(Internal high-speed clock trimming)。由软 件写入来调整内部高速时钟,它们被叠加在 HSICAL[7:0]数值上。这些位在
stm32芯片时钟(晶振)连接到芯片的 引脚
STM32芯片时钟(晶振)连接到芯片引脚一、引言STM32芯片是一款由STMicroelectronics公司生产的32位微控制器,具有高性能、低功耗、丰富的外设和可扩展性等特点。
在STM32芯片中,时钟(晶振)连接到芯片引脚是一个非常重要的部分,直接关系到芯片的工作频率和稳定性。
二、 STM32芯片时钟STM32芯片的时钟系统包括内部RC振荡器、内部RC振荡器、外部晶体振荡器等,其中晶振作为一种最常用的外部时钟源,具有稳定性高、精度好等优点,因此在实际应用中得到了广泛的应用。
三、连接方式STM32芯片中,晶振可以连接到芯片的多个引脚上,通常采用的是双向连接方式,即一个晶振同时连接到芯片的两个引脚上,以提高时钟信号的稳定性和可靠性。
四、连接引脚STM32芯片的不同系列和不同型号,在连接晶振时会有所不同,但基本的连接原理是相通的。
一般来说,连接引脚包括晶振输入引脚(XTAL1)和晶振输出引脚(XTAL2),分别用来输入晶振的信号和输出晶振的信号,并通过外部电路提供稳定的时钟信号给芯片内部的时钟系统。
五、连接建议在实际应用中,连接晶振时需要注意以下几点:1. 选择合适的晶振型号和频率,根据实际需求选择合适的晶振型号和频率,以保证芯片的工作稳定。
2. 连接线路布局合理,尽量减小晶振到芯片引脚的连接长度,减小外界干扰。
3. 使用合适的外围电路,包括对晶振输入引脚和晶振输出引脚的连接电路、滤波电路等。
六、结语正确连接STM32芯片时钟(晶振)到芯片引脚对于芯片的正常工作和稳定性有着重要的意义,希望本文能为您在实际应用中提供一些帮助。
感谢您的阅读。
七、晶振类型和频率选择在选择晶振类型和频率时,需要根据具体的应用需求进行选择。
一般来说,晶振的频率可以选择从几十kHz到几十MHz不等。
对于低功耗应用,可以选择较低频率的晶振,而对于需要高性能的应用,则需要选择较高频率的晶振。
还需要考虑晶振的负载电容和稳定性等因素,以保证晶振在工作时能够提供稳定可靠的时钟信号。
STM32外设使用要点

STM32外设使用要点1、时钟安全系统(CSS)时钟安全系统被激活后,时钟监控器将实时监控外部高速振荡器;如果HSE时钟发生故障,外部振荡器自动被关闭,产生时钟安全中断,该中断被连接到Cortex-M3的NMI的中断;同时CSS将内部RC振荡器切换为STM32的系统时钟源(对于STM32F103,时钟失效事件还将被送到高级定时器TIM1的刹车输入端,用以实现电机保护控制)。
操作流程:1)、启动时钟安全系统CSS: RCC_ClockSecuritySystemCmd(ENABLE); (NMI中断是不可屏蔽的!)2)外部振荡器失效时,产生NMI中断,对应的中断程序:void NMIException(void){if (RCC_GetITStatus(RCC_IT_CSS) != RESET){ // HSE、PLL已被禁止(但是PLL设置未变)…… // 客户添加相应的系统保护代码处// 下面为HSE恢复后的预设置代码RCC_HSEConfig(RCC_HSE_ON); // 使能HSERCC_ITConfig(RCC_IT_HSERDY, ENABLE); // 使能HSE就绪中断RCC_ITConfig(RCC_IT_PLLRDY, ENABLE); // 使能PLL就绪中断RCC_ClearITPendingBit(RCC_IT_CSS); // 清除时钟安全系统中断的挂起位// 至此,一旦HSE时钟恢复,将发生HSERDY中断,在RCC中断处理程序里,系统时钟可以设置到以前的状态}}3)、在RCC的中断处理程序中,再对HSE和PLL进行相应的处理。
注意:一旦CSS被激活,当HSE时钟出现故障时将产生CSS中断,同时自动产生 NMI。
NMI将被不断执行,直到CSS中断挂起位被清除。
因此,在NMI的处理程序中必须通过设置时钟中断寄存器(RCC_CIR)里的CSSC位来清除CSS中断。
2、SysTick工作原理Cortex-M3的内核中包含一个SysTick时钟。
stm32内部时钟输出

RCC_WaitForHSEStartUp();
RCC_PLLConfig(RCC_PLLSource_HSE_Div1,RCC_PLLMul_8);
RCC_PLLCmd(ENABLE);
//然后设置PA8口
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_8;
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
//设置时钟输出
RCC_MCOConfig(RCC_MCO_PLLCLK_Div2);
注:由于STM32 GPIO输出管脚的最大响应频率为50MHz,如果输出频率超过50MHz,则输出的波形会失真。
/////////////方法二
先把pa8配置成推挽输出,然后选择输出时钟,下面这个程序的前提是用的12M外部晶振,获得48M信号
//先设置ppl 8倍频获得96Mhz时钟
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP;
GPIO_Init(GPIOA, &GPIO_InitStructure);
2)、选择输出时钟源。
时钟的选择由时钟配置寄存器(RCC_CFGR)中的MCO[2:0]位控制。
RCC_MCOConfig(RCC_MCO);
stm32的pwm输出及频率计算方法
stm32的pwm输出及频率计算方法
一、stm32的pwm输出引脚是使用的IO口的复用功能。
二、T2~T5这4个通用定时器均可输出4路PWM——CH1~CH4。
三、我们以tim3的CH1路pwm输出为例来进行图文讲解(其它类似),并在最后给出tim3的ch1和ch2两路pwm输出的c代码(已在STM32F103RBT6上测试成功,大家放心使用!)。
四、给出了PWM频率和占空比的计算公式。
步骤如下:
1、使能TIM3时钟
RCC->APB1ENR |= 1 2、配置对应引脚(PA6)的复用输出功能
GPIOA->CRL //PA6清0GPIOA->CRL |= 0X0B000000;//复用功能输出(推挽50MHz输出)GPIOA->ODR |= 1
3、设定计数器自动重装值及是否分频
TIM3->ARR = arr;//设定计数器自动重装值(决定PWM的频率)TIM3->PSC = psc;//预分频器,0为不分频
4、设置PWM的模式(有1和2两种模式,区别在于输出电平极性相反),根据需求选一种即可
注:TIMX_CCMR1决定CH1~CH2路,TIMX_CCMR2决定CH3~CH4路。
//TIM3->CCMR1 |= 6 TIM3->CCMR1 |= 7 TIM3->CCMR1 |= 1
5、输出使能设置
TIM3->CCER |= 1。
基于寄存器操作的STM32高级定时器TIM1的四路PWM输出程序讲解
基于寄存器操作的STM32高级定时器TIM1的四路PWM输出程序讲解STM32高级定时器TIM1具有四个独立的PWM输出通道,可以用来控制四个不同的设备或驱动器。
在本篇文章中,我们将详细讲解如何使用寄存器操作实现TIM1的四路PWM输出。
首先,需要了解几个相关的概念。
STM32的定时器是通过寄存器进行配置和操作的,其中TIM1是高级定时器,具有更高级的功能和更多的寄存器。
PWM(脉冲宽度调制)是一种常见的控制技术,可实现模拟信号的数字化控制,通过调整高电平和低电平的时间比例来控制目标设备或驱动器的动作。
在开始编写程序之前,我们首先需要对TIM1进行初始化和配置。
以下是一个基本的初始化函数示例:```void TIM1_PWM_Init//开启TIM1的时钟RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM1, ENABLE);//初始化TIM1的配置TIM_TimeBaseInitTypeDef TIM_BaseStruct;TIM_OCInitTypeDef TIM_OCStruct;TIM_BaseStruct.TIM_Prescaler = 0;TIM_BaseStruct.TIM_CounterMode = TIM_CounterMode_Up;TIM_BaseStruct.TIM_Period = 999; // 设置周期为1000TIM_BaseStruct.TIM_ClockDivision = TIM_CKD_DIV1;TIM_BaseStruct.TIM_RepetitionCounter = 0;TIM_TimeBaseInit(TIM1, &TIM_BaseStruct);//配置输出比较通道TIM_OCStruct.TIM_OCMode = TIM_OCMode_PWM1;TIM_OCStruct.TIM_OutputState = TIM_OutputState_Enable;TIM_OCStruct.TIM_Pulse = 0; // 设置脉冲宽度,0表示低电平TIM_OCStruct.TIM_OCPolarity = TIM_OCPolarity_High;TIM_OC1Init(TIM1, &TIM_OCStruct);TIM_OC1PreloadConfig(TIM1, TIM_OCPreload_Enable);TIM_OC2Init(TIM1, &TIM_OCStruct);TIM_OC2PreloadConfig(TIM1, TIM_OCPreload_Enable);TIM_OC3Init(TIM1, &TIM_OCStruct);TIM_OC3PreloadConfig(TIM1, TIM_OCPreload_Enable);TIM_OC4Init(TIM1, &TIM_OCStruct);TIM_OC4PreloadConfig(TIM1, TIM_OCPreload_Enable);//启动定时器TIM_Cmd(TIM1, ENABLE);```上述代码是一个初始化TIM1的函数示例,其中包含了基本的配置步骤。
STM32时钟详细配置

STM32时钟配置STM32时钟配置步骤// 开启HSI时钟寄存器操作1).开启高速时钟HSE // 设置时钟控制寄存器RCC_CR 位16 置1使能RCC->CR|= 0x00010000;位16 :HSEON:外部高速时钟使能当进入待机和停止模式时,该位由硬件清零,关闭4-16MHz外部振荡器。
当外部4-16MHz 振荡器被用作或被选择将要作为系统时钟时,该位不能被清零。
2).等待高速时钟就绪// 读取时钟控制寄存器RCC_CR位17为1就位while(!(RCC-> CR>>17));位17:HSERDY:外部高速时钟就绪标志由硬件置’1’来指示外部4-16MHz振荡器已经稳定。
在HSEON位清零后,该位需要6个外部4-25MHz振荡器周期清零。
3).设置APB1,APB2,AHB分频系数// 设置时钟配置寄存器RCC_CFGRRCC_CFGR=0x00000400;(AHB :位4-7, (低速)APB1 :位8-10, (高速)APB2 :位11-13)位7:4:HPRE[3:0]:AHB预分频(AHB Prescaler)0xxx:SYSCLK不分频位10:8:PPRE1[2:0]:低速APB预分频(APB1) 100:HCLK 2分频位13:11:PPRE2[2:0]:高速APB预分频(APB2) 0xx:HCLK不分频4).设置PLL倍频// 配置时钟配置寄存器RCC_CFGR 位18-21RCC_CFGR|=7<<18;位21:18:PLLMUL:PLL倍频系数0111:PLL 9倍频输出5).PLL输入时钟源选择// 配置时钟配置寄存器RCC_CFGR 位16RCC_CFGR|=1<<16;位16:PLLSRC:PLL输入时钟源(PLL entry clock source) 1:HSE时钟作为PLL输入时钟。
由软件置’1’或清’0’来选择PLL输入时钟源。
STM32单片机RTC时钟的使用方法及步骤
STM32单片机RTC时钟的使用方法及步骤
STM32RTC使用步骤:
打开PWR时钟和Backup区数据访问
若使用外部低速时钟(LSE),打开LSE并等待起振
选择和打开RTC时钟,等待时钟同步
配置时间格式,分频系数等
根据需要配置时钟,日期,闹钟,唤醒,输出,时间戳,备份寄存器等模块
根据需要配置和打开中断,其中
RTC Alarm ——EXTI line 17
RTC tamper and TImestamps——EXTI line 19
RTC wakeup——EXTI line 20
下面的代码配置日期,时间,当前时间设置为15年05月31日,星期日(7),15:50:40,打开闹钟A和唤醒中断,每一秒钟来一次中断,15:50:45秒产生闹钟中断,用串口打印相应的信息。
代码:
void RTC_Config(void)
{
RTC_TImeTypeDef RTC_TimeStructure;
RTC_DateTypeDef RTC_DateStructure;
RTC_InitTypeDef RTC_InitStructure;
RTC_AlarmTypeDef RTC_AlarmStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_PWR,ENABLE);
PWR_BackupAccessCmd(ENABLE);
RCC_BackupResetCmd(ENABLE);
RCC_BackupResetCmd(DISABLE);
RCC_LSEConfig(RCC_LSE_ON);。
STM32时钟配置方法详解
一、在STM32中,有五个时钟源,为HSI、HSE、LSI、LSE、PLL。
①HSI是高速内部时钟,RC振荡器,频率为8MHz。
②HSE是高速外部时钟,可接石英/陶瓷谐振器,或者接外部时钟源,频率范围为4MHz~16MHz。
③LSI是低速内部时钟,RC振荡器,频率为40kHz。
④LSE是低速外部时钟,接频率为32.768kHz的石英晶体。
⑤PLL为锁相环倍频输出,其时钟输入源可选择为HSI/2、HSE或者HSE/2。
倍频可选择为2~16倍,但是其输出频率最大不得超过72MHz。
二、在STM32上如果不使用外部晶振,OSC_IN和OSC_OUT的接法:如果使用内部RC振荡器而不使用外部晶振,请按照下面方法处理:①对于100脚或144脚的产品,OSC_IN应接地,OSC_OUT应悬空。
②对于少于100脚的产品,有2种接法:第1种:OSC_IN和OSC_OUT分别通过10K电阻接地。
此方法可提高EMC性能;第2种:分别重映射OSC_IN 和OSC_OUT至PD0和PD1,再配置PD0和PD1为推挽输出并输出'0'。
此方法可以减小功耗并(相对上面)节省2个外部电阻。
三、用HSE时钟,程序设置时钟参数流程:01、将RCC寄存器重新设置为默认值RCC_DeInit;02、打开外部高速时钟晶振HSE RCC_HSEConfig(RCC_HSE_ON);03、等待外部高速时钟晶振工作HSEStartUpStatus = RCC_WaitForHSEStartUp();04、设置AHB时钟RCC_HCLKConfig;05、设置高速AHB时钟RCC_PCLK2Config;06、设置低速速AHB时钟RCC_PCLK1Config;07、设置PLL RCC_PLLConfig;08、打开PLL RCC_PLLCmd(ENABLE);09、等待PLL工作while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET)10、设置系统时钟RCC_SYSCLKConfig;11、判断是否PLL是系统时钟while(RCC_GetSYSCLKSource() != 0x08)12、打开要使用的外设时钟RCC_APB2PeriphClockCmd()/RCC_APB1PeriphClockCmd()四、下面是STM32软件固件库的程序中对RCC的配置函数(使用外部8MHz晶振)/******************************************************************************** Function Name : RCC_Configuration* Description : RCC配置(使用外部8MHz晶振)* Input : 无* Output : 无* Return : 无*******************************************************************************/void RCC_Configuration(void){/*将外设RCC寄存器重设为缺省值*/RCC_DeInit();/*设置外部高速晶振(HSE)*/RCC_HSEConfig(RCC_HSE_ON); //RCC_HSE_ON——HSE晶振打开(ON)/*等待HSE起振*/HSEStartUpStatus = RCC_WaitForHSEStartUp();if(HSEStartUpStatus == SUCCESS) //SUCCESS:HSE晶振稳定且就绪 {/*设置AHB时钟(HCLK)*/RCC_HCLKConfig(RCC_SYSCLK_Div1); //RCC_SYSCLK_Div1——AHB 时钟= 系统时钟/* 设置高速AHB时钟(PCLK2)*/RCC_PCLK2Config(RCC_HCLK_Div1); //RCC_HCLK_Div1——APB2时钟= HCLK/*设置低速AHB时钟(PCLK1)*/RCC_PCLK1Config(RCC_HCLK_Div2); //RCC_HCLK_Div2——APB1时钟= HCLK / 2/*设置FLASH存储器延时时钟周期数*/FLASH_SetLatency(FLASH_Latency_2); //FLASH_Latency_2 2延时周期/*选择FLASH预取指缓存的模式*/FLASH_PrefetchBufferCmd(FLASH_PrefetchBuffer_Enable); // 预取指缓存使能/*设置PLL时钟源及倍频系数*/RCC_PLLConfig(RCC_PLLSource_HSE_Div1, RCC_PLLMul_9);// PLL的输入时钟= HSE时钟频率;RCC_PLLMul_9——PLL输入时钟x 9/*使能PLL */RCC_PLLCmd(ENABLE);/*检查指定的RCC标志位(PLL准备好标志)设置与否*/while(RCC_GetFlagStatus(RCC_FLAG_PLLRDY) == RESET){}/*设置系统时钟(SYSCLK)*/RCC_SYSCLKConfig(RCC_SYSCLKSource_PLLCLK);//RCC_SYSCLKSource_PLLCLK——选择PLL作为系统时钟/* PLL返回用作系统时钟的时钟源*/while(RCC_GetSYSCLKSource() != 0x08) //0x08:PLL作为系统时钟 {}}/*使能或者失能APB2外设时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph _GPIOB |RCC_APB2Periph_GPIOC , ENABLE);//RCC_APB2Periph_GPIOA GPIOA时钟//RCC_APB2Periph_GPIOB GPIOB时钟//RCC_APB2Periph_GPIOC GPIOC时钟//RCC_APB2Periph_GPIOD GPIOD时钟}五、时钟频率STM32F103内部8M的内部震荡,经过倍频后最高可以达到72M。
STM32基础PWM输出
STM32基础PWM输出a)目的:基础PWM输出,以及中断配合应用。
输出选用PB1,配置为TI M3_CH4,是目标板的LED6控制脚。
b)对于简单的PWM输出应用,暂时无需考虑TIM1的高级功能之区别。
c)初始化函数定义:void TIM_Configuration(void);//定义TIM初始化函数d)初始化函数调用:TIM_Configuration();//TIM初始化函数调用e)初始化函数,不同于前面模块,TIM的初始化分为两部分——基本初始化和通道初始化:void TIM_Configuration(void)//TIM初始化函数{TIM_TimeBaseInitTypeDefTIM_TimeBaseStructure;//定时器初始化结构TIM_OCInitTypeDefTIM_OCInitStructure;//通道输出初始化结构//TIM3初始化TIM_TimeBaseStructure.TIM_Period = 0xFFFF;//周期0~FFFFTIM_TimeBaseStructure.TIM_Prescaler = 5;//时钟分频TIM_TimeBaseStructure.TIM_ClockDivision = 0;//时钟分割TIM_TimeBaseStructure.TIM_Coun te rMode = TIM_CounterMode_Up;//模式TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure);//基本初始化TIM_ITConfig(TIM3, TIM_IT_CC4, ENABLE);//打开中断,中断需要这行代码//TIM3通道初始化TIM_OCStructInit(& TIM_OCInitStructure);//默认参数TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM1;//工作状态TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable;//设定为输出,需要PWM输出才需要这行代码TIM_OCInitStructure.TIM_Pulse = 0x2000;//占空长度TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High;//高电平TIM_OC4Init(TIM3, &TIM_OCInitStructure);//通道初始化TIM_Cmd(TIM3, ENABLE);//启动TIM3}f)RCC初始化函数中加入TIM时钟开启:RCC_APB2PeriphClockCmd(RCC_APB2Periph_TIM3, ENABLE);g)GPIO里面将输入和输出管脚模式进行设置。
STM32学习笔记(5):通用定时器PWM输出

STM32学习笔记(5):通用定时器PWM输出1.TIMER输出PWM基本概念脉冲宽度调制(PWM),是英文“Pulse Width Modulation”的缩写,简称脉宽调制,是利用微处理器的数字输出来对模拟电路进行控制的一种非常有效的技术。
简单一点,就是对脉冲宽度的控制。
一般用来控制步进电机的速度等等。
STM32的定时器除了TIM6和TIM7之外,其他的定时器都可以用来产生PWM 输出,其中高级定时器TIM1和TIM8可以同时产生7路的PWM输出,而通用定时器也能同时产生4路的PWM输出。
1.1PWM输出模式STM32的PWM输出有两种模式,模式1和模式2,由TIMx_CCMRx寄存器中的OCxM位确定的(“110”为模式1,“111”为模式2)。
模式1和模式2的区别如下:110:PWM模式1-在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为有效电平,否则为无效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为无效电平(OC1REF=0),否则为有效电平(OC1REF=1)。
111:PWM模式2-在向上计数时,一旦TIMx_CNT<TIMx_CCR1时通道1为无效电平,否则为有效电平;在向下计数时,一旦TIMx_CNT>TIMx_CCR1时通道1为有效电平,否则为无效电平。
由此看来,模式1和模式2正好互补,互为相反,所以在运用起来差别也并不太大。
而从计数模式上来看,PWM也和TIMx在作定时器时一样,也有向上计数模式、向下计数模式和中心对齐模式,关于3种模式的具体资料,可以查看《STM32参考手册》的“14.3.9 PWM模式”一节,在此就不详细赘述了。
1.2PWM输出管脚PWM的输出管脚是确定好的,具体的引脚功能可以查看《STM32参考手册》的“8.3.7定时器复用功能重映射”一节。
在此需要强调的是,不同的TIMx有分配不同的引脚,但是考虑到管脚复用功能,STM32提出了一个重映像的概念,就是说通过设置某一些相关的寄存器,来使得在其他非原始指定的管脚上也能输出PWM。
stm32RTC实时时钟[操作寄存器+库函数]-ChangingsBlog
![stm32RTC实时时钟[操作寄存器+库函数]-ChangingsBlog](https://img.taocdn.com/s3/m/e5334ed4951ea76e58fafab069dc5022aaea46a7.png)
stm32RTC实时时钟[操作寄存器+库函数]-ChangingsBlog"RTC"是Real Time Clock 的简称,意为实时时钟。
stm32提供了一个秒中断源和一个闹钟中断源。
RTC的技术器是一个32位的计数器,使用32.768khz的外部晶振。
2038年问题在计算机应用上,2038年问题可能会导致某些软件在2038年无法正常工作。
所有使用UNIX时间表示时间的程序都将受其影响,因为它们以自1970年1月1日经过的秒数(忽略闰秒)来表示时间。
这种时间表示法在类Unix(Unix-like)操作系统上是一个标准,并会影响以其C编程语言开发给其他大部份操作系统使用的软件。
在大部份的32位操作系统上,此“time_t”数据模式使用一个有正负号的32位元整数(signedint32)存储计算的秒数。
也就是说最大可以计数的秒数为 2^31次方可以算得:2^31/3600/24/365 ≈ 68年所以依照此“time_t”标准,在此格式能被表示的最后时间是2038年1月19日03:14:07,星期二(UTC)。
超过此一瞬间,时间将会被掩盖(wrap around)且在内部被表示为一个负数,并造成程序无法工作,因为它们无法将此时间识别为2038年,而可能会依个别实作而跳回1970年或1901年。
对于PC机来说,时间开始于1980年1月1日,并以无正负符号的32位整数的形式按秒递增,这与UNIX时间非常类似。
可以算得:2^32/3600/24/365 ≈ 136年到2116年,这个整数将溢出。
Windows NT使用64位整数来计时。
但是,它使用100纳秒作为增量单位,且时间开始于1601年1月1日,所以NT将遇到2184年问题。
苹果公司声明,Mac在29,940年之前不会出现时间问题!由于RTC是一个32位计数器,同样其计时时间是有限的。
库函数中使用到了C标准时间库,时间库中的计时起始时间是1900年,可以知道时间库中不是用有符号位的32位整数来表示时间的,否则在1968年就已经溢出了。
stm32的定时器输入捕获与输出比较讲解
标签:分类: stm32it时间标记可用来计算频率,占空比及信号的其他特征,以及为事件创建日志,主要是用来测量外部信号的频率。
输出比较:定时器中计数寄存器在初始化完后会自动的计数。
从bottom 计数到top。
并且有不同的工作模式。
配则会产生比较中断(比较中断使能的情况下)。
很简单,当你设置的捕获开始的时候,cpu会将计数寄存器的值复制到捕获比较寄存器中并开始计数,当再次捕捉到电平变化时,这是计数寄存器中的值减去刚才复制的值就是这段电平的持续时间,你可以设置上升沿捕获、下降沿捕获、或者上升沿下降沿都捕获。
它没多大用处,最常用来测频率。
是的,不过默认不要写入我如果捕获上升沿,两个值相减,代表的时两个上升沿中间那段电平的时间。
对不? 是的timerl有五个通道(对应五个10引脚),在同一时刻,只能捕获一个引脚的值,对不? 那是肯定的,通道很像ADC通道,是可以进行切换的。
这里有两个单元:一个计数器单元和一个比较单元,比较单元就是个双缓冲寄存器,比较单元的值是可以根据不同的模式设置的,与此同时,计数器在不停的计数,并不停的与比较寄存器中的值进行比较,当计数器的值与比较寄存器的值相等的时候一个比较匹配就发生了,根据自己的设置,匹配了是io电平取反、变低、还是变高,就会产生不同的波形了。
是的,但是他要根据你的控制寄存器的配置,来初始化你的比较匹配寄存器5:3CMP[2:0]000itltolWHK 成选畀・卅崔时■的G尊于在TICCO中的比较也迭丼操fOOOt庄比较淆涂轨出01泄比较忧換3ft.出Olh隹向上比较设置総曲・Kom<■■4匕比较講徐諛由・在0设覽!0h没奇馥用1101没有便用Hh匕址化罐HT14 CMP[M】不蠢还是变高,就会产生不同的波形了”形啊要不然你要比较单元有什么用呢?设置输出就是置1,清除输出就是置0,切换输出就是将原来的电平取反,对不?是的你理解的很快011 :计数器向上计数达到最大值时将引脚置1,达到0时,引脚电平置0,,对不?定时器1的输出比较模式怎么用。
stm32外部时钟模式1

stm32外部时钟模式1基础了解时钟选择计数器时钟可由下列时钟源提供:●内部时钟(CK_INT)●外部时钟模式1:外部输⼊脚(TIx)●外部时钟模式2:外部触发输⼊(ETR)●内部触发输⼊(ITRx):使⽤⼀个定时器作为另⼀个定时器的预分频器在平常使⽤中我们系统复位 000 默认使⽤内部时钟源外部时钟源1来⾃定时器⾃⾝输⼊通道1或通道2的输⼊信号,经过极性选择和滤波以后⽣成的触发信号,连接到从模式控制器,进⽽控制计数器的⼯作;来⾃通道1的输⼊信号经过上升沿、下降沿双沿检测⽽⽣成的脉冲信号进⾏逻辑相或以后的信号就是TI1F_ED信号,即TI1F_ED双沿脉冲信号。
//SIGNAL_COUNT(GPIO)#define SIGNAL_COUNT_ENA_CLK_ENABLE() __HAL_RCC_GPIOB_CLK_ENABLE() //PB0#define SIGNAL_COUNT_ENA_GPIO_Port (GPIOB)#define SIGNAL_COUNT_ENA_Pin (GPIO_PIN_0)#define SIGNAL_COUNT_DIR_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE() //PA7#define SIGNAL_COUNT_DIR_GPIO_Port (GPIOA)#define SIGNAL_COUNT_DIR_Pin (GPIO_PIN_7)#define SIGNAL_COUNT_DIR_Get_IRQn (EXTI9_5_IRQn) //EXTI7中断//SIGNAL_COUNT(AFIO & TIM)#define SIGNAL_COUNT_PUL_CLK_ENABLE() __HAL_RCC_GPIOA_CLK_ENABLE() //PA6#define SIGNAL_COUNT_PUL_GPIO_Port (GPIOA)#define SIGNAL_COUNT_PUL_Pin (GPIO_PIN_6)#define SIGNAL_COUNT_TIM_CLK_ENABLE() __HAL_RCC_TIM3_CLK_ENABLE() //TIM3#define SIGNAL_COUNT_Get_TIM (TIM3)#define SIGNAL_COUNT_Get_HTIM (htim3)//GPIO输⼊#define SIGNAL_COUNT_READ_DIR_IO() (SIGNAL_DIR_GPIO_Port -> IDR & SIGNAL_DIR_Pin)#define SIGNAL_COUNT_READ_ENA_IO() (SIGNAL_ENA_GPIO_Port -> IDR & SIGNAL_ENA_Pin)//TIM输⼊#define SIGNAL_COUNT_READ_COUNT() (SIGNAL_COUNT_Get_TIM -> CNT)//TIM输出#define SIGNAL_COUNT_UP() (SIGNAL_COUNT_Get_TIM -> CR1 &= ~(TIM_CR1_DIR))#define SIGNAL_COUNT_DOWN() (SIGNAL_COUNT_Get_TIM -> CR1 |= (TIM_CR1_DIR))/*** @brief TIM_SIGNAL_PUL初始化* @param NULL* @retval NULL**/void REIN_TIM_SIGNAL_COUNT_Init(void){/* GPIO初始化 */GPIO_InitTypeDef GPIO_InitStruct = {0};/* GPIO Ports Clock Enable*/SIGNAL_COUNT_PUL_CLK_ENABLE(); //启⽤SIGNAL_COUNT_PUL端⼝时钟/*Configure GPIO pin*/GPIO_InitStruct.Pin = SIGNAL_COUNT_PUL_Pin;GPIO_InitStruct.Mode = GPIO_MODE_INPUT; //输⼊模式GPIO_InitStruct.Pull = GPIO_NOPULL; //禁⽤上下拉HAL_GPIO_Init(SIGNAL_COUNT_PUL_GPIO_Port, &GPIO_InitStruct);/* TIM初始化 */TIM_SlaveConfigTypeDef sSlaveConfig = {0};TIM_MasterConfigTypeDef sMasterConfig = {0};SIGNAL_COUNT_TIM_CLK_ENABLE(); //启⽤TIM时钟SIGNAL_COUNT_Get_HTIM.Instance = SIGNAL_COUNT_Get_TIM;SIGNAL_COUNT_Get_HTIM.Init.Prescaler = 0; //预分频:0SIGNAL_COUNT_Get_HTIM.Init.CounterMode = TIM_COUNTERMODE_UP; //向上计数SIGNAL_COUNT_Get_HTIM.Init.Period = 65535; //16位周期SIGNAL_COUNT_Get_HTIM.Init.ClockDivision = TIM_CLOCKDIVISION_DIV1; //不分频SIGNAL_COUNT_Get_HTIM.Init.AutoReloadPreload = TIM_AUTORELOAD_PRELOAD_DISABLE; //禁⽤⾃动重新加载if (HAL_TIM_Base_Init(&SIGNAL_COUNT_Get_HTIM) != HAL_OK){Error_Handler();}sSlaveConfig.SlaveMode = TIM_SLAVEMODE_EXTERNAL1; //外部时钟模式sSlaveConfig.InputTrigger = TIM_TS_TI1FP1; //TI1FP1sSlaveConfig.TriggerPolarity = TIM_TRIGGERPOLARITY_RISING; //上升沿触发sSlaveConfig.TriggerFilter = 4; //滤波参数(FDIV2_N6)if (HAL_TIM_SlaveConfigSynchro(&SIGNAL_COUNT_Get_HTIM, &sSlaveConfig) != HAL_OK){Error_Handler();}sMasterConfig.MasterOutputTrigger = TIM_TRGO_RESET; //主机模式触发复位sMasterConfig.MasterSlaveMode = TIM_MASTERSLAVEMODE_DISABLE; //禁⽤主机模式if (HAL_TIMEx_MasterConfigSynchronization(&SIGNAL_COUNT_Get_HTIM, &sMasterConfig) != HAL_OK){Error_Handler();}/*begin work*/HAL_TIM_Base_Start(&SIGNAL_COUNT_Get_HTIM);}static void Signal_Count_Capture_Goal(void){//SignalPort获取⽬标//读取En_Pinif(SIGNAL_COUNT_READ_ENA_IO()){if(sg_cut.en_inve)sg_cut.en_valid = true;elsesg_cut.en_valid = false;}else{if(sg_cut.en_inve)sg_cut.en_valid = false;elsesg_cut.en_valid = true;}//采样(对⽐上次的计数值)sg_cut.sampling_count_last = sg_cut.sampling_count;sg_cut.sampling_count = SIGNAL_COUNT_READ_COUNT();sg_cut.sampling_count_sub = sg_cut.sampling_count - sg_cut.sampling_count_last;//采样(缓冲输出)//(采样数/细分数)*Move_Divide_NUM = 电机输出步数sg_cut.interp_out = sg_cut.sampling_count_sub * sg_cut.subdivide_form;//输出if(sg_cut.en_valid){signal_moreio.goal_location = sg_cut.interp_out; //Count模式借⽤⽬标位置存放⽬标位置增量 signal_moreio.goal_disable = false;signal_moreio.goal_brake = false;}else{signal_moreio.goal_location = 0; //Count模式借⽤⽬标位置存放⽬标位置增量signal_moreio.goal_disable = true;signal_moreio.goal_brake = false;}}。
STM32定时器输出比较模式

STM32定时器输出比较模式
一、原理
1.设置定时器的分频系数和计数器自动重装载值,确定定时器的计数
范围和计数频率。
2.设置定时器的比较寄存器的值,确定触发事件的时间点。
3.当定时器计数器的值等于比较寄存器的值时,触发比较事件。
4.在比较事件发生时,可以执行一些操作,比如改变输出引脚的电平
状态、产生特定的输出波形、中断处理等。
二、使用方法
1.在STM32芯片的库函数中,需要先初始化相关的定时器和GPIO引脚。
2.设置定时器的分频系数和计数器自动重装载值,确定定时器的计数
范围和计数频率。
3.设置比较寄存器的值,确定触发事件的时间点。
4.配置比较输出通道的模式和极性,确定输出信号的电平状态。
5.编写比较事件的中断处理函数,实现在比较事件发生时的操作。
6.启动定时器计数器,使定时器开始计数。
三、常见应用
1.生成PWM波形:可以通过比较寄存器的值和定时器计数器的值,确
定PWM的周期和占空比,从而生成不同的PWM波形用于控制电机、LED等。
2.声音发生器:可以通过定时器输出比较模式产生不同频率的方波,从而实现声音发生器。
3.定时中断:可以通过比较寄存器的值和定时器计数器的值,实现定时中断。
4.输入捕获:可以通过比较寄存器的值和定时器计数器的值,进行输入捕获,用于测量外部信号的频率、占空比等。
STM32-PWM输出总结
学习后发现stm32的定时器功能确实很强大,小总结一下方便以后使用的时候做参考。
Stm32定时器一共分为三种:tim1和tim8是高级定时器,6 和7是基本定时器,2—5是通用定时器。
从名字就可以看得出来主要功能上的差异。
今天我主要是用定时器做pwm 输出,所以总结也主要是针对pwm 方面的。
先大致说下通用和高级定时器的区别。
通用的可以输出四路pwm信号互不影响。
高级定时器可以输出三对互补pwm 信号外加ch4通道,也就是一共七路。
所以这样算下来stm32一共可以生成4*5+7*2=30路pwm信号。
接下来还有功能上的区别:通用定时器的pwm信号比较简单,就是普通的调节占空比调节频率(别的不常用到的没去深究);高级定时器的还带有互补输出功能,同时互补信号可以插入死区,也可以使能刹车功能,从这些看来高级定时器的pwm 天生就是用来控制电机的。
Pwm 输出最基本的调节就是频率和占空比。
频率当然又和时钟信号扯上了关系。
高级定时器是挂接到APB2 上,而通用定时器是挂接到APB1 上的。
APB1和APB2的区别就要在于时钟频率不同。
APB2 最高频率允许72MH,而APB1 最高频率为36MHZ。
这样是不是通用定时器只最高36MHZ 频率呢,不是的;通用定时器时钟信号完整的路线应该是下面这样的:AHB(72mhz)→APB1 分频器(默认2)→APB1时钟信号(36mhz)→倍频器(*2 倍)→通用定时器时钟信号(72mhz)。
在APB1和定时器中间的倍频器起到了巨大的作用,假如红色字体的“APB1 分频器”假如不为1(默认是2),倍频器会自动将APB1 时钟频率扩大2倍后作为定时器信号源,这个它内部自动控制的不用配置。
设置这个倍频器的目的很简单就是在APB1是36mhz的情况下通用定时器的频率同样能达到72mhz。
我用的库函数直接调用函数SystemInit();这个函数之后时钟配置好了:通用定时器和高级定时器的时钟现在都是72mhz(你也可以自己再配置一下RCC让他的频率更低,但是不能再高了)。
STM32时钟源的介绍及使用方法——STM32时钟树

STM32时钟源的介绍及使⽤⽅法——STM32时钟树【温馨提⽰:以下内容均来⾃⽹友的⽆私奉献或书本的摘抄,在此表⽰感谢!】上图是STM32的时钟树,从树上我们可以看到,STM32的时钟有两个来源——内部时钟和外部时钟。
按时钟频率来分,⼜可分为⾼速时钟和低速时钟。
因此STM32的时钟有四个来源:⾼速外部时钟信号(HSE)、低速外部时钟信号(LSE)、⾼速内部时钟信号(HSI)和低速内部时钟信号(LSI)(图中分别⽤蓝⾊的①~④标注)。
①HSE⾼速外部时钟:由外部4~16MHz的晶体或有源晶振提供,通常采⽤8MHz。
②LSI低速外部时钟:外部晶体提供,主要是给实时时钟(RTC),⼀般为32.768kHz。
③HSI⾼速内部时钟:由内部RC振荡器产⽣的8MHz时钟,但不够稳定。
④LSI低速内部时钟:内部RC振荡器产⽣的供给RTC的时钟,频率在30kHz~60kHz之间,通常约40kHz。
时钟在STM32内部最终是供给四⼤块(图中⽤红⾊椭圆圈出):USB的48MHz时钟、系统时钟SYSCLK、实时时钟模块RTC、独⽴看门狗的时钟IWDGCLK。
其中最主要的,也是最⼤头是系统时钟SYSCLK,它可以是内部或外部⾼速时钟直接接过来,也可以内、外部⾼速时钟是PLL倍频后提供的,系统时钟再分别供给Cortex内核、SDIO、AHB总线、DMA、APB1、APB2等。
我们通常是采⽤外部8MHz⾼速时钟(HSE),所以着重说HSE。
我们以前⾯的GPIO上的时钟为例,由ST的Datasheet可知,GPIO是在APB2⾼速外设总线上的,图中绿⾊的线就是时钟的流程,我们⼀步步地来看。
8MHz外部晶体(或晶振)输⼊后,先经过⼀个开关PLLXTPRE(HSE divider for PLL entry),此开关决定对HSE进⾏2分频再输⼊到PLL或直接到PLL。
我们选择不分频。
这样时钟⼜到了第⼆个开关PLLSRC(PLL entry clock source),此开关决定PLL的时钟来源,是内部⾼速时钟⼆分频的时钟还是PLLXTPRE的输出。
STM32主时钟输出的双机系统应用
两个单片机 , 而 在 常 规 的 单 片 机 电路 设 计 中 , 每 个 单 片 机 需 要 一 个 单 独 的 晶振 电 路 提 供 时钟 信 号 。S T M3 2系 列 是 S T公 司 推 出 的 基 于 AR M 内核 的 3 2 位单 片机 , 此 系 列 的 单 片 机 具 有 强 大 的功 能 , 其 中就 包 括 主 时 钟 输 出 功 能 , 可 以让 其 中 的 一 个 单 片 机 输 出 时 钟 信 号 , 提 供 给 另 一 个 单 片 机或者其他芯片使用 。
Xu J i a n c hu n
( I n g e r s o l l Ra n d E n g i n e e r i n g ̄Te c h n o l o g y Ce n t e r - As i a P a c i f i c , S h a n g h a i 2 0 0 0 5 1 , C h i n a )
特灵( TRANE )品 牌 的 一 款 空 调 控 制 板 使 用 了 两 个 S TM3 2单 片机 : 一 个是 s TM3 2 F 2 0 5 ,为 主 单 片 机 , 处 理
寄存器 ( R C C — C F G R ) 中设置 4个不同的时钟信号源 , 即高
速外部时 钟 ( HS E c l o c k ) 、 锁 相环 时钟 ( P L L c l o c k ) 、 系 统
技 术 纵 横
S T M3 2主 时 钟 输 出 的 双 机 系 统 应 用
徐 建春
( 英格索兰亚太工程技术中心, 上海 2 0 0 0 5 1 )
摘要: 介 绍 了S TM3 2单 片机 主 时钟 输 出功 能 ,通过 硬 件 设 计 和软 件 设 计 实现 了主 时钟 输 出功 能 、 S TM3 2单 片机 主 时钟 输 出的 波 形展 示 ,以及 在 空 调 控 制 系统 中的 应 用 。S TM3 2 F 0 3 0使 用 S TM3 2 F 2 0 5输 出 的 时钟 , 可 以正 常 稳 定 的 工 作 , 经
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
STM32 RCC实验MCO脚输出时钟波形
2012-5-1 08:05|发布者: benben|查看: 1457|评论: 0
摘要: 为了能用示波器看到系统时钟,决定将系统时钟输出到MCO引脚上去。
弄了一晚上,
看见波形了。
首先建立空的工程,将下面三行代码注释掉:;IMPORT SystemInit ;删除SystemInit自己写RCC初始化函数;LDR R0, =SystemInit ...
为了能用示波器看到系统时钟,决定将系统时钟输出到MCO引脚上去。
弄了一晚上,看见波形了。
首先建立空的工程,将下面三行代码注释掉:
;IMPORT SystemInit ;删除SystemInit自己写RCC初始化函数
;LDR R0, =SystemInit
;BLX R0
下面是设置函数,使用HSI作为系统时钟,不实用PLL,直接将HSI输出到MCO引脚:void My_RccInitMCOHSI(void)
{
uint8_t temp;
My_Rcc_DeInit();
RCC->CR |= 1<<0; //复位HSION 开启内部时钟;其实内部时钟不用管的,开机自动使用内部时钟。
while(!(RCC->CR>>1)); //检查HSI是否就绪
RCC->CFGR &= (~0x03); //清零CFGR的0、1位HSI作为系统时钟
while(temp!=0x00) //读取CFGR的2、3为,判断是否是HSI作为系统时钟设置
{
temp=RCC->CFGR>>2;
temp&=0x03;
}
//此时HSI已经成为系统时钟
//HSI时钟就绪后,直接输出到MCO(PA8)
RCC->APB2ENR |= 1<<2; //使能PA时钟
RCC->APB2ENR|=1<<5; //使能PORTD时钟
GPIOA->CRH&=0XFFFFFFF0;
GPIOA->CRH|=0X0000000B;//PA8 推挽输出(MCO)
// //设置MCO输出内部HSI时钟
RCC->CFGR |= 5<<24; //MCO输出HSI时钟
//RCC->CFGR |= 4<<24; MCO输出系统时钟SYSCLK
//此时就可以在PA8即MCO引脚看见输出波形了对比下,两者是一样的。
}
下边是示波器出来的图:
HSE直接作为SYSCLK。
与HSI相似
设置方法如下,代码中有注释:
void My_RccInitMCOHSE(void)
{
uint8_t temp;
My_Rcc_DeInit();
RCC->CR |= 1<<16; //开启HSEON 开启外部时钟。
while(!(RCC->CR>>17)); //等待HSE就绪
//选择HSE作为系统时钟
RCC->CFGR |= 0x01;
while(temp!=0x01) //读取CFGR的2、3为,判断是否是HSE作为系统时钟设置{
temp=RCC->CFGR>>2;
temp&=0x03;
}
//此时HSE已经成为系统时钟
//HSE时钟就绪后,直接输出到MCO(PA8)
RCC->APB2ENR |= 1<<2; //使能PA时钟
GPIOA->CRH&=0XFFFFFFF0;
GPIOA->CRH|=0X0000000B;//PA8 推挽输出(MCO)
//设置MCO输出内部HSE时钟
RCC->CFGR |= 0x06<<24; //MCO输出HSE时钟
//RCC->CFGR |= 4<<24; MCO输出系统时钟SYSCLK
//此时就可以在PA8即MCO引脚看见输出波形了对比下,两者是一样的。
}
PLL部分只放代码和图,刚才写了半天,提示2分钟只能提交5次信息,然后就没了。
郁闷的不想再写了
void My_RccInitMCOPLL(uint8_t PLL)
{
uint8_t temp;
My_Rcc_DeInit();
RCC->CR |= 1<<16; //开启HSEON 开启外部时钟。
while(!(RCC->CR>>17)); //等待HSE就绪
//选择HSE作为系统时钟
//RCC->CFGR |= 0x01;
//设置PLL倍频数
PLL -= 2; //根据PLL倍频系数与RCC->CFGR的18到21位得出(PLLMUL)RCC->CFGR |= PLL<<18;
RCC->CFGR |= 1<<16; //HSE作为PLL时钟源
RCC->CR |= 1<<24;
while(!(RCC->CR>>25));//等待PLL锁定
//选择PLL输出作为系统时钟源
RCC->CFGR |= 0x02;
while(temp!=0x02) //读取CFGR的2、3为,判断是否是HSE作为系统时钟设置{
temp=RCC->CFGR>>2;
temp&=0x03;
}
//此时HSE已经成为系统时钟
//HSE时钟就绪后,直接输出到MCO(PA8)
RCC->APB2ENR |= 1<<2; //使能PA时钟
GPIOA->CRH&=0XFFFFFFF0;
GPIOA->CRH|=0X0000000B;//PA8 推挽输出(MCO)
//设置MCO输出内部HSE时钟
RCC->CFGR |= 0x07<<24; //MCO输出HSE时钟
//RCC->CFGR |= 4<<24; // MCO输出系统时钟SYSCLK
//此时就可以在PA8即MCO引脚看见输出波形了对比下,两者是一样的。
}。