基于STM32嵌入式模糊PID步进电机控制系统的设计_王虎
基于STM32的分布式步进电机控制系统设计

基于STM32的分布式步进电机控制系统设计刘威龙;孙明磊;王頔;王启伟【摘要】In view of requirement to the multi-stepmotor control system,a stepmotor distributed control system with USB and CAN bus was designed based on STM32 MCU.The bus topology,hardware and software design,USB driver development,and acceleration and deceleration curves design of stepmotor were explained in detail.The system realized the multi-stepmotor distributed control.%针对多步进电机控制系统的要求,设计了基于STM32及MSP430的分布式多步进电机控制系统,采用了USB及CAN的通信方式。
文中详细阐述了系统的总线拓扑结构、软硬件设计、USB驱动程序设计及步进电机加减速特性的设计,实现了对多个步进电机的分布式控制。
【期刊名称】《数字技术与应用》【年(卷),期】2012(000)003【总页数】3页(P12-14)【关键词】USB;CAN;STM32;MSP430;分布式;步进电机【作者】刘威龙;孙明磊;王頔;王启伟【作者单位】北京航空航天大学机械工程及自动化学院,北京100191;北京航空航天大学机械工程及自动化学院,北京100191;北京航空航天大学机械工程及自动化学院,北京100191;北京航空航天大学机械工程及自动化学院,北京100191【正文语种】中文【中图分类】TP39步进电机控制简便,在载荷容限内,转速、转角只取决于输入脉冲信号的频率和数量。
在多步进电机控制系统中,随着控制节点的增多,控制信号及反馈信号大量增加,集中控制体系难以满足实时性、快速性及准确定的要求。
基于STM32的电机驱动系统的设计毕业设计论文
毕业设计论文基于STM32的电机驱动系统的设计毕业设计(论文)原创性声明和使用授权说明原创性声明本人郑重承诺:所呈交的毕业设计(论文),是我个人在指导教师的指导下进行的研究工作及取得的成果。
尽我所知,除文中特别加以标注和致谢的地方外,不包含其他人或组织已经发表或公布过的研究成果,也不包含我为获得及其它教育机构的学位或学历而使用过的材料。
对本研究提供过帮助和做出过贡献的个人或集体,均已在文中作了明确的说明并表示了谢意。
作者签名:日期:指导教师签名:日期:使用授权说明本人完全了解大学关于收集、保存、使用毕业设计(论文)的规定,即:按照学校要求提交毕业设计(论文)的印刷本和电子版本;学校有权保存毕业设计(论文)的印刷本和电子版,并提供目录检索与阅览服务;学校可以采用影印、缩印、数字化或其它复制手段保存论文;在不以赢利为目的前提下,学校可以公布论文的部分或全部内容。
作者签名:日期:学位论文原创性声明本人郑重声明:所呈交的论文是本人在导师的指导下独立进行研究所取得的研究成果。
除了文中特别加以标注引用的内容外,本论文不包含任何其他个人或集体已经发表或撰写的成果作品。
对本文的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。
本人完全意识到本声明的法律后果由本人承担。
作者签名:日期:年月日学位论文版权使用授权书本学位论文作者完全了解学校有关保留、使用学位论文的规定,同意学校保留并向国家有关部门或机构送交论文的复印件和电子版,允许论文被查阅和借阅。
本人授权大学可以将本学位论文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本学位论文。
涉密论文按学校规定处理。
作者签名:日期:年月日导师签名:日期:年月日注意事项1.设计(论文)的内容包括:1)封面(按教务处制定的标准封面格式制作)2)原创性声明3)中文摘要(300字左右)、关键词4)外文摘要、关键词5)目次页(附件不统一编入)6)论文主体部分:引言(或绪论)、正文、结论7)参考文献8)致谢9)附录(对论文支持必要时)2.论文字数要求:理工类设计(论文)正文字数不少于1万字(不包括图纸、程序清单等),文科类论文正文字数不少于1.2万字。
基于STM32步进电机控制器的设计研究
基于STM32步进电机控制器的设计研究作者:周建寅谢超姜婷婷来源:《现代商贸工业》2019年第35期摘要:随着工业和科技的发展,嵌入式控制系统也越来越受到人们生产生活的青睐,其拥有强大的处理、控制的性能的同时还有着低功耗,体积小等特点。
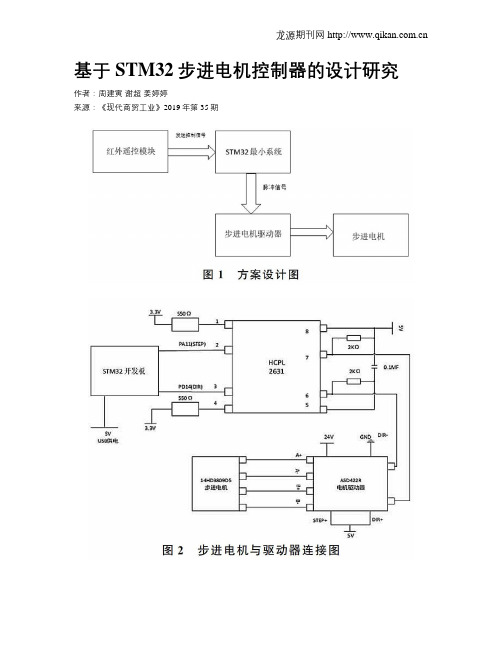
本设计选用基于ARM Cortex-M3内核的STM32芯片作为主控芯片,外围电路包括红外接收模块,电机驱动器;该系统的控制流程是通过红外遥控模块发送指令,STM32接收指令并向步进电机驱动模块发送相应的脉冲。
驱动模块通过细分等操作驱动步进电机完成所需的动作特性;程序在MDK环境下进行编程,通过程序实现不断扫描红外遥控是否发出指令,发出什么指令,从而根据扫描的结果使步进电机产生相对应的动作如正转、反转、加速、加速等动作,再由测试软件算法估算出电机的速度。
实验结果表明,该系统的稳定性和步进电机各项运动指标均满足要求。
关键词:STM32;步进电机;正反转;加减速中图分类号:TB 文献标识码:A doi:10.19311/ki.1672-3198.2019.35.116STM32系列是由意法半导体(STMicroelectronics)生产的嵌入式控制芯片;32系列包含多款芯片,本设计采用STM32F103RB芯片,其基于ARM代表性的内核Cortex-M3,该内核采用市场目前主流的ARMv7架构和面向高级语言的Thumb-2指令集的同时拥有很多其他鲜明的优势如更强大性能、位带操作等,并在代码密集度、实际应用、能耗、售价等方面均衡的发展。
步进电机是将电脉冲转换为线位移或者角位移的驱动装置,同时也是脉冲单值对应的增量元件,不同的步进电机需要不同的驱动器去驱动它们的运动,在实际控制系统中,当控制器输出脉冲信号先经过驱动器,再由驱动器驱动。
步进电机按照特定的方向旋转一定角度并且这个角度是固定的是电机的固有属性被称为“步距角”,步进电机位移与驱动器输入脉冲成正比,并与输入脉冲同步,因此通过主控芯片来改变脉冲信号的频率、占空比等,来具体的控制步进电机获得具体需要的运行特征。
基于STM32的步进电机控制系统-自动化本科毕业设计

基于STM32的步进电机控制系统-自动化本科毕业设计本文简要介绍了自动化本科毕业设计的主题和目的,并概述了STM32步进电机控制系统的重要性和应用领域。
步进电机控制系统是现代自动化技术中的重要组成部分,广泛应用于各个领域,如机械加工、电子设备、机器人控制等。
该系统能够实现精确控制和位置定位。
然而,传统的步进电机控制系统存在一些限制,如运行效率低、系统稳定性差等。
因此,基于STM32的步进电机控制系统应运而生。
本科毕业设计的主题是基于STM32的步进电机控制系统的设计与实现。
通过使用STM32单片机,设计一个高效稳定的步进电机控制系统,能够实现精确的位置控制和运动控制。
该系统具有较高的运行效率和稳定性,能够应用于各种自动化领域,提高生产效率和产品质量。
关键词:步进电机控制系统,STM32,自动化,本科毕业设计步进电机是一种常见的电动机类型,具有特定的原理和工作方式。
它在自动化领域有广泛的应用。
本文将讨论步进电机的原理和工作方式,并介绍选择基于STM32的步进电机控制系统作为本科毕业设计主题的原因。
步进电机是一种将电脉冲信号转换为离散步进运动的电动机。
它通过电磁铁的启动顺序和定向,使得转子以角度的方式进行运动。
步进电机的原理基于电磁铁的电磁效应和磁性材料的性质来实现。
步进电机在自动化领域有许多应用。
例如,步进电机常被用于精密定位系统、数控机床、印刷机、纺织机械等领域。
它们的精确度、可靠性和可编程性使它们成为许多自动化系统中的理想选择。
选择基于STM32的步进电机控制系统作为本科毕业设计的主题有以下原因:STM32是一种广泛应用的单片机系列,具有强大的计算和控制能力。
STM32具有丰富的外设资源,能够满足步进电机控制系统的需求。
STM32提供了方便的开发环境和丰富的开发工具,使得设计和开发步进电机控制系统更加简便和高效。
基于STM32的步进电机控制系统可以在实践中验证和应用步进电机控制的原理和技术,对于学生来说具有一定的教育意义。
基于模糊自适应PI控制的智能车的设计与研究_王虎
得出两种控制算法下的控制性能参数如表 1 所示 .
表 1 两种控制算法下控制性能对照表 控制算法 传统 P I 模糊自适应 P I 超调量 ( /% ) σ 2 5 0 调节时间 ( ) s 0. 2 5 0. 0 4 5 扰动转速最大 / / ) 增量 ( n r s 6. 5 3. 3 扰动转速 ) 调节时间 ( s 0. 1 8 0. 0 5 给定转速改变 给定转速改变的 /% ) 的超调 ( σ 6 0 ) 调节时间 ( s 0. 2 1 0. 0 3
V o l . 2 8. N o . 1 , M a r . 2 0 1 3
基于模糊自适应 P I控制的智能车的设计与研究
王 虎, 郎 朗* , 余雪 玮 , 孙 书诚
( ) 安徽工程大学 安徽省电气传动与控制重点实验室 , 安徽 芜湖 2 4 1 0 0 0 摘要 : 为实现智能车自动寻迹 , 研制一种基于汽车模型为硬件平台的智能车系统 . 传统 P 难 I控制的参数固 定 , 满足模型沿指定路径行驶的智能化 要 求 ; 而模糊自适应 P 控制灵活且适应性强的优 I控 制 具 有 控 制 精 度 高 , 点, 可以精确 、 稳定的控制车速 . 路径信息采集模块将摄 像 头 采 集 的 道 路 信 息 传 送 至 微 处 理 器 , 微处理器输出 同时综合编码器将测得的速度反馈给微处理器 , 采用模糊 P 合适控制量对舵机进行方向控制 , I控制对智能 车 该方案可以使智能车快速稳定的沿指定路径行驶 . 直流电机进行速度控制 , 关 键 词: 智能车 , 摄像头 , 模糊控制 , 自适应 , 微处理器 , 直流电机 中图分类号 : T P 2 9; T P 2 4 2. 6 文献标识码 : A
基于STM32的PID算法控制直流电机系统设计
统, 利用位置传感 器信号 作为 反馈 , 和数字 P I D算法 结合 来 控 制速度 , 达到 了理想 的控制效果 。
值为机 电速度 。系统 还可 以通过 修改 内部 程序 来实 现控 制
直 流 电机 正 反 转 等 辅 助 功 能 。 图 书在 图书 馆 后 , 利用 条码 的置换 功 能 , 把 丢 失 图 书 条 形 码 置换成一个新 的条形码 后 , 将 新 的条码 号 贴在 新的 图书 上 , 这 本 图 书就 可 进 行 下 一 次 的 流 通 。 这 样 的 处 理 在 对 于 系 统
2 0 1 7年 第 1 6 卷 第 2 期
基于 S T M 3 2的 P I D算 法 控 制 直 流 电机 系统 设 计
口 林 森 刘 志 东 吕庆 军
【 内容摘要 】 为提 高直流 电机数字化的精 密可控性 , 以及 解决 P I D算 法参数在 控制 直流 电机 中具 有一定的复 杂性 问题 , 故本 文
现象的发生 , 能够及 时快捷地改 正工作 人员在操 作上 的错 误
而带来工作上的失误 , 使 流通管理部 门更 好地开 展对 读者 的
服务 , 系统 的 功 能 给 工 作 带 来 了 极 大 的 便 利 。
数据没有任何影 响的前提下 , 就可以非常方便地把 “ 丢 书” 的
处理工作完成 , 提高 了工作 效率 , 减 少 了 广 大 读 者 经 济 上 的 浪费 。 总之 , 整个 l n t e r r l i b系 统 纷 繁 复 杂 , 人 机 交 换 界 面 却 很 友 好 亲和, 便于操作和使用。
基于stm32103的步进电机控制系统设计

基于stm32103的步进电机控制系统设计步进电机是一类常用的电机,广泛应用于控制系统中。
本文旨在介绍步进电机及其在控制系统中的应用,并概述本文的研究目的和重要性。
步进电机是一种将电脉冲信号转换为旋转运动的电机。
构成和工作方式步进电机由定子、转子和驱动电路组成。
定子是电磁铁,可以根据输入的电流控制电磁铁产生磁场。
转子是由磁性材料制成的旋转部分,定子的磁场会使得转子受到磁力的作用而旋转。
步进电机的工作方式是通过不断输入脉冲信号来控制电机的运动。
每一次输入一个脉冲信号,步进电机就会转动一定的步进角度。
步进角度取决于步进电机的类型和驱动电路的设置,常见的步进角度有1.8度和0.9度。
输入脉冲信号旋转的步进角度输入脉冲信号的频率和方向决定了步进电机的转动速度和方向。
每一个脉冲信号的到来,步进电机会按照预定的步进角度旋转。
例如,若步进电机的步进角度为1.8度,那么每接收一个脉冲信号,步进电机就会旋转1.8度的角度。
综上所述,步进电机通过输入脉冲信号实现了精确而可控的旋转运动。
本文将阐述基于STM单片机的步进电机控制系统设计。
该设计包括硬件电路设计和软件程序设计。
本文将介绍如何通过STM与步进电机进行通信和控制,以实现预定的步进运动。
步进电机控制系统的硬件电路设计主要包括以下部分:步进电机驱动电路:通过STM的GPIO口控制步进电机驱动电路,实现电机的正转、反转和停止等操作。
电源电路:为步进电机提供稳定的电源供电,保证系统正常工作。
外设接口:设计相应的接口电路,实现STM与外部设备的连接。
步进电机控制系统的软件程序设计主要涉及以下方面:初始化设置:在程序开始运行时,对STM进行初始化设置,包括引脚配置、时钟设置等。
步进电机驱动程序:编写相应的程序代码,通过GPIO口控制步进电机的驱动电路,实现电机的正转、反转和停止等操作。
运动控制程序:编写相应的程序代码,通过控制步进电机的驱动电路,实现预定的步进运动,包括移动一定的步数、以特定的速度旋转等。
一种基于STM32的PID直流电机控制系统

为微分时间常量。
位置式 PID 算法是根据当前实际位置与要达到的预
期位置的偏差,进行 PID 控制。将每一次的误差进行累
加作为积分,其运算量大,每次输出均与过去的状态相
关,缺点是可能会引起大幅度超调。
1.2 增量式PID算法
增量式 PID 算法的表达式为
= ∆u (k )
Kp [e(k) − e(k
图2 硬件系统整体流程图
2.1 电机驱动模块L298N 本 文 选 用 L298N 为 驱 动 模 块, 其 电 路 中 包 含 有
两个 H 桥的高电压大电流双桥式驱动器。在使用中, STM32F103 配置的 PWM 输出引脚直接给该模块提供 变占空比的信号,方便控制。
其控制状态表见表 1。L298N 电机驱动模块可以实 现电机的调速与正反转,此次研究只使用其驱动一台二 相直流电机构成闭环调速系统,根据表 1 配置 IN1(输入) 与 IN2,对使能端输出 PWM 脉冲,即可实现变占空比 调速。
系统对电机的输出轴分别进行转速设定 , [13] 分别设定 了 190 rpm、220 rpm、250 rpm、280 rpm、310 rpm、 340 rpm、370 rpm、400 rpm、410 rpm、420 rpm、 430 rpm,实际测量结果如表 2,数据进行了误差计算。
表2 转速数据采集及误差计算
3 软件整体流程
此次研究以 Keil MDK 作为编译开发环境,软件部 分的重点是 PID 控制的处理。流程图如图 4,主要包括 主程序、PID 处理、外部中断、定时中断、PWM 的输 出和编码器的脉冲计数。
2.2 编码器测速模块 编码器为 AB 相增量式霍尔编码器,输出标准的方
波,STM32F103 自带的编码器模式可直接读取脉冲信 号,AB 相编码器的 A 相、B 相互相延迟四分之一周期 输出脉冲。如图 3 为编码器的输出波形,取 A 相、B 相 的上升沿和下降沿都作为脉冲,可以取得二倍频或四倍 频。四倍频采样可提高系统运算时的精确性。通过每 10 ms 读取处理一次编码器脉冲,可以测得电机速度和 处理控制,此次使用四倍频采样,有提高系统运算精确 性的优势。
基于STM32的直流电机PID调速系统设计.
《计算机控制技术课程设计》题目:基于STM32的直流电机PID调速学院:计算机与电子信息学院专业:电气工程及其自动化班级:电气12-5 学号: 12034320515 姓名:任课教师:完成时间: 2015.11.18——2015.12.30基于STM32的直流电机PID调速摘要电机转速控制在运动控制系统中占有至关重要的地位,本设计将电机转速控制作为研究对象;以PID为基本控制算法,STM32F103单片机为控制核心,产生受PID算法控制的PWM脉冲实现对直流电机转速的控制。
同时利用光电传感器将电机速度转换成脉冲频率反馈到单片机中,实现转速闭环控制,达到转速无静差调节的目的。
在系统中采320×240TFTLCD显示器作为显示部件,通过4个按键通过界面切换方式设置P、I、D、V四个参数和正反转控制,启动后可以通过显示部件了解电机当前的运行状态和系统的CPU温度。
该系统控制精度高,具有很强的抗干扰能力。
关键词:PID 直流电机反馈调节Based on the STM32 PID speed control of dc motorAbstractMotor speed control occupies a crucial position in the motion control system, the design of the motor speed control for the study; in the basic PID control algorithm, STM32F103 microcontroller core, by the PID control algorithm generates a PWM pulse to achieve DC speed control. At the same time the use of photoelectric sensors to convert the motor speed to pulse frequency feedback to the microcontroller to achieve closed-loop speed control, to speed static error adjustment purposes. Mining 320 ×240TFTLCD monitor as a display unit in the system, through four key settings P, I, D, V four parameters and reversing control through the interface switching mode, start to understand the current state of the motor and the system through the display unit CPU temperature. The system control and high precision, has a strong anti-jamming capability.Keywords: PID DC motor feedback regulation目录1. 绪论 (1)1.1研究背景与意义 (1)1.2本文主要研究方法 (1)2. 设计方案与论证 (2)2.1系统设计方案 (2)2.2控制器模块设计方案 (2)3. 系统硬件电路设计 (3)3.1整体电路设计 (3)3.1.1整体理论 (3)3.1.2整体简单结构图和资源分配图 (3)3.2最小单片机系统设计 (4)3.2.1STM32F103复位电路 (6)3.2.2电源电路 (6)3.3电机驱动电路设计 (7)3.4光电码盘编码器电路设计 (7)3.5显示电路设计 (8)3.6按键电路设计 (10)4. 系统软件设计 (10)4.1PID算法 (10)4.2PID参数整定方法 (11)4.3电机速度采集算法 (12)4.4程序流程图 (12)5. 系统调试 (13)5.1软件调试 (13)5.2系统测试与分析 (14)6. 总结与展望 (15)参考文献 (16)附录一部分程序源程序 (17)附录二系统界面实物图和PCB图 (20)1.绪论1.1研究背景与意义电动机在现代的工业中,是主要的驱动设备,尤其是直流电动机,由于它的平滑调速性和结构上的简单,使其成为许多电器,如洗衣机,电梯等的驱动。
基于STM32的一种步进电机系统的设计
基于STM32的一种步进电机系统的设计刘成淦;王直【摘要】A stepper motor control system based on STM32 controller is introduced in this paper.The system uses the S type function model for the acceleration and deceleration motion of the stepper motor,which effectively avoids the loss of step and overshoot of the system during the high speed movement.In the system,the system can ensure the accuracy of the system in high frequency and low frequency motion by adjusting the frequency division coefficient.In the system,the vibration and noise of the system can be reduced effectively by adjusting the subdivision of the motor drive chip.The experimental results show that the system has low cost,stable operation and high reliability.%文中介绍了一种基于STM32控制器的步进电机控制系统,该系统对步进电机的加速和减速运动采用了S型函数模型,有效的避免了系统在高速运动时出现的失步和过冲现象.在系统中通过调节分频系数保证了系统在高频和低频运动时的准确性,在系统中通过调节电机驱动芯片的细分能够有效地降低了系统的振动和噪声.实验结果表明,整个系统成本低、运行平稳、可靠性高.【期刊名称】《电子设计工程》【年(卷),期】2018(026)001【总页数】5页(P131-134,139)【关键词】步进电机;控制系统;分频系数;细分【作者】刘成淦;王直【作者单位】江苏科技大学计算机科学与工程学院,江苏镇江212003;江苏科技大学计算机科学与工程学院,江苏镇江212003【正文语种】中文【中图分类】TN02步进电机广泛的应用于国民经济中,它具有机构简单、控制方面等优点,即使是应用在开环的系统中仍然能够具有较高的准确率。
基于STM32的步进电机控制器设计
—
—
一
哩
圃
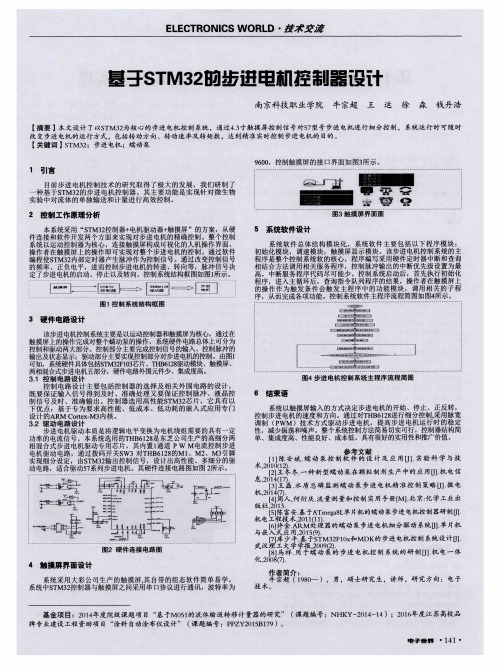
图4步进电机控制系统主程序流程简图
控制 电路设 计主 要包 括控 制 器的选 择 及相 关 外围 电路 的设 计 , 既要 保 证输 入信 号得 到及 时 、准确 处 理又 要保 证控 制脉 冲 、液 晶控 制信 号及 时 、准 确输 出 。控制 器选 用 高性能 S T M3 2 芯 片 ,它具有 以 下优 点 :基 于专 为要 求高 性 能 、低成 本、 低功 耗 的嵌入 式应 用 专 门 设计 的A R M C o r t e x — M3 内核 。 3 _ 2 驱 动 电路设 计 步进 电机驱动 本质是将逻 辑电平 变换为 电机 绕组需 要的具有一 定 功率 的电流信号 。本系统 选用 的T H B 6 1 2 8 是东芝 公司生产 的高细分 两 相混 合式步进 电机驱动 专用芯 片 ,其 内置 l 通道 P W M 电流控 制步进 电机 驱动 电路 ,通 过拨码 开关 S W3对T H B 6 1 2 8 的M1 、M2 、M3 引脚 实现细 分设定 ,由S T M3 2 输 出控制信 号,设计 出高性能 、多细分 的驱 动 电路 ,适 合驱动5 7 系列步进 电机 。其 硬件 连接 电路 图如图 2 所示 。
一 … … 1 _ … … ~I r… … … 1 r 一 — —— ]
5 系统软件设计
系统 软件 总 体结 构模 块化 ,系统 软件 主要 包 括 以下程 序模 块 : 初始化模 块 ,调 速模块 ,触摸屏 显示模块 。该步进 电机控 制系统 的主 程序是整 个控制 系统软 的核心 ,程 序编写 采用硬 件定时器 中断和 查询 相结合方 法调用相 关服 务程 序 ,控 制脉冲 输出 的中断优先 级设置为 最 高, 中断服务程 序代码尽 可能少 。控制系 统启动 后,首先执 行初始 化 程 序 ,进 入主循环 后 ,查询指令 队列程序 的结果 ,操作者在 触摸屏 上 的操 作作 为触 发 条件 会触 发主 程 序 中的功 能模 块 ,调 用相 关 的子 程 序,从而完成 各项功能 。控制 系统软件主程 序流程简 图如图4 所示 。
基于STM32智能保温杯控制系统设计
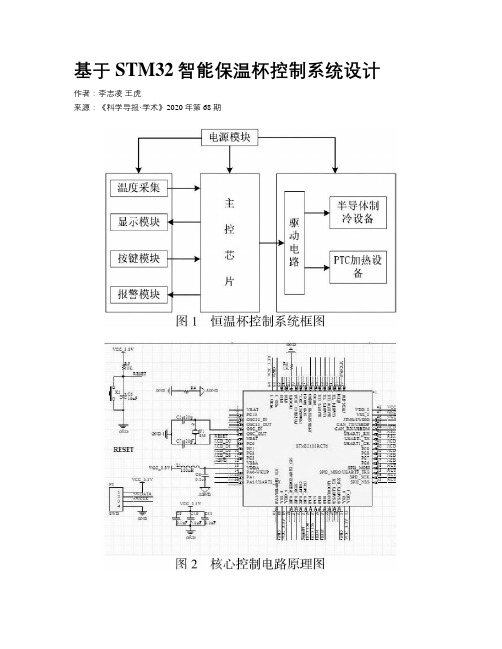
基于STM32智能保温杯控制系统设计作者:李志凌王虎来源:《科学导报·学术》2020年第68期【摘要】设计了一种基于半导体制冷及PTC陶瓷加热技术的恒温杯控制系统,实现水杯的制冷、加热、恒温等功能。
设计电路采用STM32F103系列单片机为控制器,通过防水型DS18B20数字温度传感器对水温进行数据采集,采用模糊PID算法合理精准控制水温;系统采用按键方式进行温度设定,采用OLED进行数据显示,利用报警电路实现温度提醒。
经实验验证,半导体制冷时,水温可达到10℃以下;PTC加热时,水温达到90℃以上。
【关键词】STM32;半导体制冷;水温控制;模糊PID算法1引言饮水健康一直以来都是人们关注的问题,水温过高容易损伤口腔黏膜、食道以及胃肠粘膜,容易引发食道癌症。
水温过低容易损伤肠胃,使身体过寒。
水温在40℃对人体最为适宜。
实现水温的精准控制不仅有益于我们的健康,还可以大大的提升生产效率,节约资源,提高生活品质。
饮用水水杯水温控制也应运而生。
前人对水杯温度控制已经做了一定的研究,如水杯加热采用PTC发热片,可以使水温达到90℃以上;使用半导体制冷片制冷。
但半导体热面无散热装置,制冷效率不高。
侯卫周等研究的温控智能水杯具有测温、加热调温功能,但不具有制冷功能。
本文设计一种利用PTC加热,半导体制冷技术并结合模糊PID算法实现水温控制的恒温杯设计。
通过按键设置温度,可满足不同场合、不同人群使用。
2系统硬件设计2.1 硬件结构设计本设计采用STM32F103系列单片机及PID闭环算法实现恒温杯温度控制。
硬件设备主要有以下模块:MCU核心控制模块、电源电路、温度检测模块、驱动电路模块、按键模块、显示模块、报警模块、半导体制冷和PTC加热模块。
图1为恒温杯控制系统框图。
整个恒温杯的闭环控制系统的核心是模糊PID控制算法。
首先通过防水型DS18B20数字温度传感器采集温度数据,然后将采集到的温度数据写入FLASH中方便数据保存与擦写,防止断电丢失数据。
基于stm32控制的步进电机程序的创新
基于STM32控制的步进电机程序的创新引言步进电机在许多应用中都扮演着重要的角色,其精确性和可编程性使其成为自动化领域的瑰宝。
本文将深入探讨如何基于STM32微控制器进行步进电机的控制,并探讨一些创新的方法,以提高其性能和应用范围。
第一部分:STM32微控制器的概述为了深入了解基于STM32的步进电机控制,首先需要了解STM32微控制器的基本特性。
STM32是一款由STMicroelectronics开发的32位微控制器系列,具有高性能、低功耗和丰富的外设。
它具备广泛的通信接口、丰富的存储器和强大的处理能力,使其成为控制步进电机的理想选择。
STM32系列还包括不同的型号和系列,以适应各种应用需求。
这使得开发人员能够选择最适合其项目的型号,无论是低成本、低功耗的应用还是高性能、实时要求的系统。
第二部分:步进电机工作原理步进电机是一种将电能转化为机械运动的设备。
它以离散的步进角度运动,每一步都由电脉冲触发。
这种运动方式使步进电机非常适合需要高精度和可控性的应用,如印刷机械、数控机床和3D打印机。
在步进电机内部,有两个主要部分:定子和转子。
定子包括定子齿和线圈,而转子则包括永磁体。
通过在定子线圈中施加电流,可以产生磁场,使定子齿和转子上的永磁体相互作用,从而产生扭矩,驱动转子旋转。
第三部分:STM32控制步进电机的基本方法在控制步进电机时,STM32微控制器可以使用不同的方法。
以下是一些基本的步进电机控制方法:1. 单步模式在单步模式下,每个脉冲将步进电机移动一个固定的步进角度。
这是最简单的控制方法,适用于许多应用,如打印机纸张进纸和3D打印机的定位。
2. 微步模式微步模式比单步模式更高级,它通过逐渐增加电流来产生平滑的运动。
这可以提高步进电机的分辨率和运动平滑性,适用于需要高精度控制的应用。
3. 传感器反馈一些步进电机系统还使用传感器反馈来实现闭环控制。
这些传感器可以检测电机的位置,并将信息反馈给STM32微控制器,以实现更高精度和稳定性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
嵌入式实时操作系统在 S TM 32 处理器上的移植及应用。设计出具有良好人机交互界面的步进电机控制器。首先介绍了
整个控制系统的硬件构成,然后分析了模糊 P ID 的控制原理及算法的实现,最后给出了控制系统的软件设计方案。
关键词:步进电机;模糊 P ID 控制;S TM 32 处理器;μC /O S - Ⅲ
步进电机是一种将电脉冲信号变换成角位移的机电 执行元件,它能直接接受 MCU 输出的数字信号,不需要 进行 A/D 转换,因此步进电机在直接数字控制系统中用 得相当广泛。
机械工程师 2014 年第 11 期 139
制造业信息化
MANUFACTURING INFORMATIZATION 仿真 / 建模 / CAD/ CAM/ CAE/ CAPP
c(t)为比较变量。控制器原理图如图 3。
(r t) c(t)
ec e
模糊 控制器
KP KI KD
PID 控制器
执行机构
测量装置
被控对象
图 3 模糊自整定 PID 控制原理图
根据操作人员经
表 1 控制规则表
验,以及模糊规则确定 规则号 e ec KP KI KD
方 法 ,采 用“IF A and B 1 NB NB PB NB PS
1)分别是第 k 和第(k-1)时刻的偏差信号。
2.2 模糊 PID 控制器
如果设定的速度为 Vd,而当前的实际速度为 Vr,则速
度偏差 e(t)=Vr-Vd,偏差变化率 EC(t)=E(t)-E(t-1)。把
速度偏差 e(t)和偏差变化率 EC(t-1)作为控制器的输入
变量,而控制量 KP、KI、KD 为输出变量,编码器实时测量值
制造业信息化
仿真 / 建模 / CAD/ CAM/ CAE/ CAPP MANUFACTURING INFORMATIZATION
基于STM32 嵌入式模糊 PID步进电机控制系统的设计
王虎, 彭如恕, 尹泉 (南华大学 机械工程学院,湖南 衡阳 421001)
摘 要:设计了一种基于 S TM 32 处理器的步进电机控制系统。以自整定模糊 P ID 控制理论为基础,阐述了 μC /O S - Ⅲ
STM32 处理器 STM32F103VET6
功率
步
放大
进
隔离
电
驱动
机
触摸 显示屏
SDRAM
电源 模块
图 1 系统总体结构框图
1.1 STM32F103x 芯片简介 STM32F103x 系列使用高性能的 ARM Cortex-M3 内
核,工作频率为 72 MHz,内置高速存储器(高达 128K 字 节的闪存和 20K 字节的 SRAM),丰富的增强 I/O 端口和 联接到两条 APB 总线的外设。所有型号的器件都包含 2 个 12 位的 ADC、3 个通用 16 位定时器和一个 PWM 定时 器,还包含标准和先进的通信接口,多达 2 个 I2C 和 SPI、 3 个 USART、一个 USB 和一个 CAN。这些丰富的外设配 置,使得 STM32F103x 微控制器适合于多种应用场合:电 机驱动和应用控制、医疗和手持设备、工业应用、可编程 控制器、变频器、打印机和扫描仪等。 1.2 速度测量和显示
例如:
#define OS_TASK_SW() NVIC_INT_CTRL=NVIC_
PENDSVSET;
#define OSIntCtxSw () NVIC_INT_CTRL =NVIC_
PENDSVSET;
#define OS_TS_GET () (CPU_TS)CPU_TS_TmrRd
();
3)OS_CPU_C.C 文件实现了 11 个函数,主要完成任
步 进 电 机 的 驱 动 采 用 的 是 SANKEN 公 司 的 UDN2916LB 驱动集成电路,能够驱动双绕组双极步进电 机。UDN2916LB 适用的电机电压范围为 10~45 V,逻辑 电压不能超过 7 V;通过内部脉宽调制控制器(PWM)可 实现最大 750 mA 的输出电流。系统采用 STM32 的通用 定时器来产生 PWM 脉冲信号,实现步进电机的控制。通 过软件程序来进行步进电机实时速度和给定速度的比 较。根据模糊 PID 控制算法,计算出 PWM 信号的输出频 率,以控制可控硅的通断频率,实现步进电机的加减速。
辑推理系统,可以得出 10 NM NS PM NM NB
控制量的模糊集合为 U= (E×EC)oR, 经过模糊推 理后,需要对模糊 PID 控制器调整的参数进行 清晰化处理,以获得精 确量。模糊量清晰化方 法有很多,如最大隶属 度法、面积法、重心法
11 NM ZO PS NM NM 12 NM PS PS NS NS 13 NM PM ZO ZO NS 14 NM PB NM ZO PS 15 NS NB PM NM NS 16 NS NM PM NM NS 17 NS NS PS NS NM 18 NS ZO PS NS NM 19 NS PS NS ZO NS
等,在本控制器中采用 20 NS PM NM PS NS
最大隶属度法。 3 软件的设计
21 NS PB NS PS ZO 22 ZO NB PS NM NS
软件部分的设计由系统软件和应用软件组成。通过
对 μC/OS-Ⅲ在 STM32 上的移植来完成系统软件的设计,
而应用软件功能的实现是建立在此基础上的。
中图分类号:TP 272
文献标志码:A
文章编号:1002-2333(2014)11-0139-03
Design of Embedded Fuzzy PID Stepping Motor Control System Based on STM32 WANG Hu, PENG Shuquan, YIN Quan
本文所设计的控制系统采用的是带速度反馈的闭环 系统,通过光电测速码盘采集脉冲,作为 STM32 编码器 接口的输入信号,经过数据处理,从而得到步进电机的转 速和转向。
系统触摸显示部分采用带驱动的 LCD 触摸屏。在此 选用 M13201-A0 型 LCD 触 摸 屏 ,它 是 3.2 寸 液 晶 屏 (230),使用 ILI9341 芯片控制液晶屏,通过 TSC2046 芯 片控制触摸屏。在本系统中用 FSMC(静态存储控制器)模 拟 8080 时序与 MCU 进行通信,这样相对于普通的 I/O 接口进行模拟更有效率。 1.3 步进电机的控制
3.1 系统软件设计
为了满足控制器对实时性的要求,在此选用嵌入式
实时操作系统 μC/OS-Ⅲ。μC/OS-Ⅲ移植包括两个部分,
即 μC/OS-Ⅲ系统移植文件和 μC/CPU 移植文件。μC/OS-
Ⅲ 系 统 移 植 文 件 包 括 3 个 文 件 , 即 OS_CPU.H、
OS_CPU_C.C 及 OS_CPU_A.S 文件,这 3 个文件用户不能
进行修改。
1)μC/OS-Ⅲ是可以裁剪的,即当应用程序不需要
μC/OS-Ⅲ内核的某些组件时,可以把这些组件在编译阶
段去掉。这些裁剪工作是通过调整配置文件 os_cfg.h 和
os_cfg_app.h 中的宏定义常量的值实现的。
2)OS_CPU.H 中定义了与处理器相关的宏、常量和数
据类型以及任务切换的执行代码。
(College of Mechanical Engineering,University of South China,Hengyang 421001,China)
Abstract: A stepping motor control system based on STM32 microprocessor is designed. Based on the theory of self-tuning fuzzy -PID ,the transplantation and applications of μC/OS - Ⅲ embedded real -time operating system in STM32 are expounded. The stepping motor controller with good human-machine interface is developed. Firstly, the hardware structures of the control system are introduced, then the theory of fuzzy-PID is analyzed. The soft design ideas of the control system are given. Key words: stepping motor; fuzzy-PID control; STM32 processor; μC/OS-Ⅲ
务堆栈和系统时钟初始化,以及一些钩子函数。
4)OS_CPU_A.S 文件是由汇编语言编写,主要实现了
两个函数:
140 机械工程师 2014 年第 11 期
制造业信息化
仿真 / 建模 / CAD/ CAM/ CAE/ CAPP MANUFACTURING INFORMATIZATION
人字齿轮齿条传动机构的建模与模态分析
THEN C and D”形式,通 2 NB NM PB NB PS
过反复实验对比,可以 确 立 模 糊 控 制 规 则 ,如 表 1 所示。
由模糊控制规则可 以确定模糊关系 R,然后 选择 Mamdani 型模糊逻
3 NB NS PM NB NB 4 NB ZO PM NS NM 5 NB PS PS NS NM 6 NB PM ZO NS NB 7 NB PB ZO ZO PS 8 NM NB PB NB PS 9 NM NM PB NM NS
1.43k
GND
C43 4700p
图 2 步进电机驱动电路