基于DSP的图像采集及处理系统的设计与实现
基于DSP的视频图像采集系统硬件电路实现
D 0 0 A 7 1A 5R M 之 间均 使用通 用可 M9 0 , A l A A S 1 编程 I / O口相连。比 J外还设计了—个 J A X2 T G 5 的 在线可编程调试接口, 便于在线编程。 2 S 核心电路设计 .DP 3 2. 31电源引脚和时钟引脚 电源引脚: 电压分为两级 , 电源 提供 C U核 P 使用的电源电 c o 压 vD 。及提供片上外设使用的电
接地 。 时钟引脚: 时钟发生器由内部振荡器和锁相 环 P L电路构成,可以 L 输入 。 X1 6脚) ( 9 : 接外部晶体振荡器的一个 引脚接
地或 悬 空。
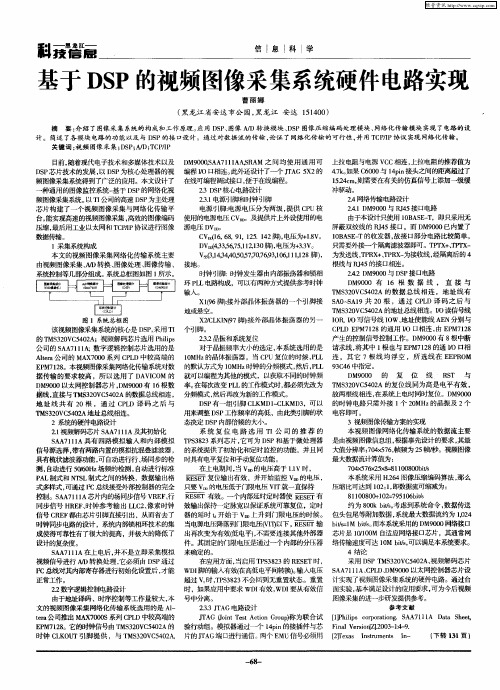
X /L N9 2 KI(7脚) C : 接外部晶体振荡器的另一 该视频图像采集系统的核心是 D P采用 T 个 引脚 。 S, I 的T 3 O c 4 2 ;视频解码芯片选用 P ip Ms 2 v 5 O A hl s i 2_ .2晶振和系统复位 3 公司的 S A 1 1 数字逻辑控制芯片选用的是 A T 凡 l 对于晶振频率大小的选定 , 本系统选用的是 A ea h r 公司的 MA 7 0 x O o系列 C L P D中较高端的 1MH 0 z的晶体振荡器。当 C U复位的时候 ,L P PL 0 z 然后 ,L PL E M 18 P 7 2。本视频图像采集网络化传输系 统对数 的默认方式为 1 MH 时钟 的分频模式, 据传输 的要求较高 ,所 以选用 了 D VC M的 就可以编程为其他的模式,以获取不同的时钟频 A IO D 90 M 0 0以太网控制器芯片 , M 0 0 1 根数 率。 D 90 有 6 在每次改变 P L L 的工作模式时 , 都必须先改为 据线 , 直接与 T S 2 Vc 4 2 M 3 O 5 O A的数据总线相连 , 分频模式, 然后再改为新的工作模式。 地 址线 共 有 2 根 ,通 过 C L O P D译 码 之 后 与 D P有一组引脚 C KMD1  ̄K S L - L MD3 4 ,可以 T 30 5 0 A地址总线相连。 MS 2VC 4 2 用来调整 D P S 工作频率的高低 ,由此类引脚的状 2系统的硬件电路设计 态决定 D P内部倍频的大小。 S 系 统 复 位 电路 选 用 T 公 司 的 推 荐 的 I z 视频解码芯片 S A l 1 1 A 7 1A及其初始化 S A l1 A 7 1A具有 四路模拟输入和内部模拟 T S 8 3 列 芯片 , 为 D P和 基于 微 处 理器 P32 系 它可 S 信号源选择 , 带有两路内置的模拟抗混叠滤波器 , 的系统提供了初始化和定时监控的功能 ,并且同 具有梳状滤波器功能 , 可自动进行行、 场同步 的检 时具有电平复位和手动复位功能。 测 , 动进行 5 / H 场频的检测 , 动进行标准 自 00 z 6 自 在上电期间, v 当 ∞的电压高于 1 v时, . 1 吾 的电压, PL A 制式和 N S 制式之间的 TL 转换 , 数据输 出格 面 吾 亍复位输出有效,并开始监控 V 式多样式, 可通过 I 2 C总线接受外部控制器的完全 只要 V 的电压低于门限电压 V T就一直保持 I —个内 部延时定时器使 面 有 衙 控制。S A7 1 A 1 A芯片内的场同步信号 V F行 面 有效。 l RE 、 同步信号 H E 、 R F 时钟参考输 出 L C 、 L 2像素时钟 效输出保持一定脉宽以保证系统可靠复位 ,定时 信号 C E 都由芯片引脚直接引出,从而省去了 器的延时 t RF d 开始于 v 上升到 门限电压的时候 。  ̄v - 面 输 时钟 同步电路的设计,系统内部锁相环技术的集 当电源电压降落到门限电/ ( 以下 , f 氐 , 不需要连接其他外部器 成使得可靠性有了 很大的提高,并极大的降低 了 出再次变为有效f 电平) 设计的复杂度。 件。其 固 定的门限电压是通过—个内部的分压器 S A A 7 1A在上电后 , l1 并不是立 即采集模拟 来确定的。 视频信号进行 A / D转换处理 , 它必须由 D P S 通过 在应 用方 面 , 当启 用 T S 8 3的 R S T时 , P32 EE I 2 C总线对其内部寄存器进行初始化设置后 , 才能 WD 脚的输入有效( I 在高低电平 间转换)输入电压 。 超 过 V 时 ,P 3 2 T S 8 3不会 回到无 重 置状 态 。重置 正常工作。 时 ,如果应用中要求 WD 有效, I I WD 要从有效信 2 数字逻辑控制电路设计 . 2 由于地址译码 、 时序控制等工作量较大, 本 号中分离。 文的视频图像采集网络化传输系统选用的是 A— l 2 . JA .3 T G电路设 计 3 tr公司推出 M X7 0 S系列 C L ea A 00 P D中较高端的 JA JitTs A t nG op称为联 合试 T G on et ci ru) o 4i E M7 2 。它的时钟信号由 T 30 c 4 2 P 18 Ms 2 V 5 0 A的 验行动组。模拟器通过 — 1pn的接插件与芯 时钟 C K U 引脚 提供 ,与 T s 2 v 5 0 片的 JA 端 口 LOT M 30 c 42 TG 进行通信 。 两个 E U信号必须用 M
基于DSP和FPGA的CCD图像采集系统设计与实现

( )AD 2 3 ]及 转换 控 制 2 9 4
A 94 D 2 3是 A I 司 生 产 的 1 D公 4位 、3 p 高 性 能 模 数 Mss
转 换 器 。A 9 4 D 20与 A 9 4 D 2 3完全 兼 容 ,因 此 系统 的最 高 采
样率可兼容到 1M p。 0 ss
CoK Lc
求 非常 严 格 ,如 果 两 者 时序 关 系 电 阻 R, 阻 抗 匹配 作 用 。D 0 2 一 个 反 向驱 动 器 , 起 S 0 6是
它 的输 入 逻 辑 ‘ ’ 电 压 为 1 V,输 出 逻 辑 ‘ ’为 ( 1 . 5 1 V一 + .)V;输 入 逻 辑 ‘ ’为 06 0 7 0 . V,输 出逻 辑 ‘ ’ 为 ( + 0 V
s 或I 1 1 s 或I 2 2 s jI 3 3 l
囊 1 趁 l I 3 囊
换 ,以减 少 误 码 率 ,提 高采 样 精 度 。
图 2 C D驱 动 时 序 仿 真结 果 C ( )FF 的 实 现 及控 制 3 IO 在 两个 不 同 时钟 域 中传 送 数 据 时 ,异 步 先进 先 出 由于 F G P A产 生 的 驱 动 时 序并 不能 直接 输 送 给 C D 芯 C 片 ,一 方 而 是 因 为 C D 驱 动 电 平 比 较 特 殊 ; 另 一 方 而 , C ( IO,Fr n FrtO t FF i tI i u)通 常 被 用 来 保 证 数 据 传 送 的安 s s 全 性 。设 计 中采 用 F G 来 实 现 双通 道 数 据 的缓 存 和 数 PA
的 一 头 流 人 、从 另 一 头 流 出 ,先
进 入 的 数 据 先 流 出 。 FF 具 有 IO 两 套 数 据 线 而无 地 址 线 ,可 在 其
基于DSP的图像采集与处理系统的研究与设计
P C b a s e d d a t a a c q u i s i t i o n c rd a . Ba s e d o n he t i n ro t d u c t i o n o f t h e s y s t e m s t r u c t u r e nd a b a s i c p i r n c i p l e . he t i ma g e a c q u i s i t i o n nd a p r o c e s s i n g p r o c e d u r e Wa s na a l y z e d. nd a s i mu l a t i o n b a s e d o n N【 AT L AB i s d o n e . u s e d f o r c o mp a r i s o n wi h t he t t e s t o n DS P p l a t f o m . r T h e t e s t s h o we d ha t t t h e s y s t e m c a n wo r k nd i e p e n d e n t l y , h a d t h e v a l u e o f s t a b i l i t y a n d r e a l — t m e i . i t C n a b e a p p l i e d t o a l l k i n d s o f r e a l — t i me i ma g e p r o c e s s ng i .
Re s e a r c h a nd De s i g n o f t he I ma g e Ac q ui s i t i o n a n d Pr o c e s s i ng S ys t e m Ba s e d o n DSP
基于DSP机器视觉的道路图像采集和处理系统设计
同 时提 出 了道路 图像 处理 算 法流 程 以及 具 体 的程 序框 架 ,最终 在软 件 集 成 开发 环 境 CCS中生 成 应 用程 序 以及 P 1 动程序 ,在 多次试验 中取得 了不错 的效 果 。 C 驱
关 键 词 : 图像 采 集 ; 图 像 处 理 ;DS P;P 总 线 C1
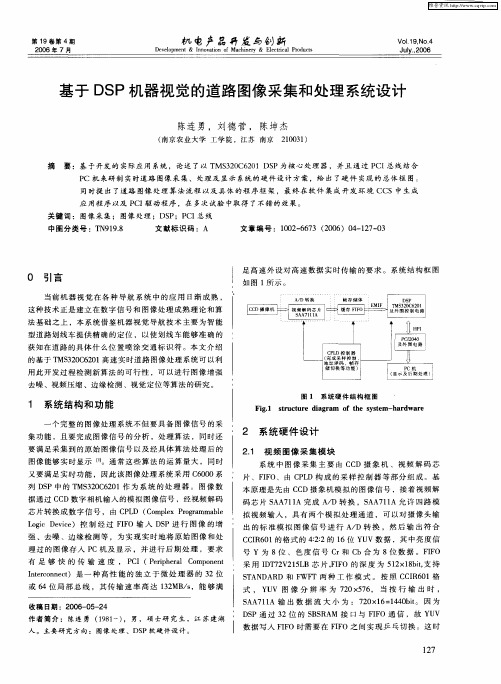
码 芯片 S A 1A 完成 A D 转换 ,S A 1 A允许 四路 模 A 71 / A 71 拟视 频 输入 ,具有 两 个 模 拟处 理 通道 ,可 以对 摄 像 头输
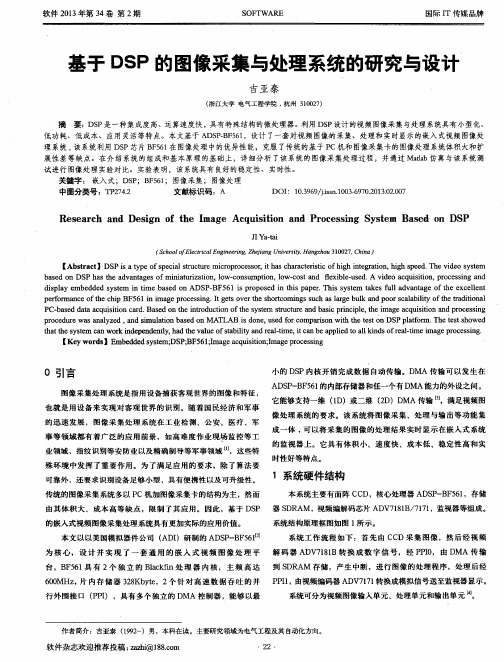
据 通过 C D数字 相机 输入 的模 拟 图像信 号 ,经视频 解码 C 芯 片转 换 成数 字信 号 ,由 C L ( o lx P ormma l P D C mpe rga be L gc D vc ) 控 制 经 过 FF 输 入 D P进 行 图 像 的增 o i eie IO S 强 、去 噪 、边缘 检测 等 ,为实 现 实 时地将 原 始 图像 和 处
S A DA D 和 F T N R W 两 种 工 作 模 式 。 按 照 C I 6 1格 CR 0 式 ,Y UV 图 像 分 辨 率 为 7 0x 7 , 当 按 行 输 出 时 , 2 5 6 S A 1A 输 出 数 据 流 大 小 为 :7 0 l = 4 0 i 因 为 A 71 2 x 6 14 bt 。
I
{
CL 控 器 PD 制
— ]r —1 一
儿
I址 换 功 存I 地 切 码、能 I 储 译等 帧)
i j
} —C — 广 —P — 一 1 — —
l 显不及后 期处理 ) ( 1
用此 开发 过 程检 测新 算法 的可行 性 ,可 以进行 图像 增强 去 噪 、视频 压缩 、边缘检 测 、视 觉定 位等算 法 的研 究 。
基于DSP的号码图像实时采集系统

幅/ 的速 度 实 时采 集 到 大 小为 1 6 2的 清 晰 的号 码 图像 , 具 有 D P 实时 处理 图像 的 可扩 展 性 。 秒 7 ×6 并 S
V0131 . No. — 34
J n ,0 8 u .20
基 于 DS P的 号 码 图像 实 时 采 集 系统
郝 爽 , 红 星 孙
( 宁科 技 大 学 电子 与 信 息 工 程 学 院 , 宁 鞍 山 14 5 ) 辽 辽 10 1
摘 要 : 针对便携式号码图像采集与处理设备, 设计 了一种基于 D P的号码图像 实时采集系统。系统以 S
图 1 系统 组 成
F g. S se c m p s in i 1 y tm o o i o t
2 系统 的实现
2 1 图像数据 采集 .
系统中 C S MO 传感器的作用是采集号码图像数据 , 并对获取的图像进行抗混叠滤波 、 放大 、 ~D转
换以及 截取等 预 处 理 。C MOS图 像 传 感 器 与 C D传 感 器 相 比 , 有 功 耗 小 、 本 低 、 于集 成 等 优 C 具 成 便 点… 。传 感器 内置一 定分 辨率 的图像传 感器 阵列 , 实现最 高 3 可 0帧/ 的 图像采 集 速度 , S ( 总 秒 按 C
b s协议 , u) 完成 C S图像传感 器 的初 始化 。图像 传 感 器将 目标 图像 信 号 转换 为数 字 视 频 图像 信号 , MO
基于DSP的图像采集板设计
2 1 年 3 月 00
江 苏 技 术 师 范 学 院 学 报
J OURNAL OF JANGS TEACHERS UNI I U VERS nY TE OF CHNOL OGY
Vo. 6No3 1 . . 1 Ma . 2 0 r . 01
基于 DS P的图像采 集板设 计
理 。图像识别包括诸如条码识别 、 生物特征识别( 人脸识别、 指纹识别等 ) 技术 、 智能交通 中的动态对象识
别 、 写识别 等 , 手 涉及 的技 术 领域也 越来 越广泛 。
本文是基于对视频图像进行识别 的 目的而设计的一种图像采集和处理系统 , 通过该系统可进一步研 究 图像处理与识别技术。
收稿 日期 : 0 9 1— 4 修 回 日期 : 0 9 1 — 5 20— 20 ; 2 0 — 2 1
基金项 目: 江苏技术师范学院青年科 研基金项 目 1 Y 84 ) ( Y 005 作者简介 : 倪福银 (9 8 )男 , 17 一 , 江苏南通人 , 讲师 , 硕士, 主要 研究方 向为数字图像处理 , S D P技术与应用。
() 辑控 制芯 片 XC 54 2逻 9 14
图像采集板所采用 的可编程逻辑器件为 X 9 14 芯片。 C 54X 它主要用于产生存储器的地址 、 / AD转换 器时钟信号 、 MD转换器清零信号及存储器的片选信号等, 另外, 可编程器件还用作总线控制器, 控制 电 路中的不 同模块对数据总线、 地址总线的使用。 C 54 产生必要 的逻辑控制和时序 , X 9 14 将解码得到的亮度 数据发送到存储 区存储。在 D P S 需要读取状态和图像数据时, 产生必要的逻辑控制和时序 , 将数据从存 储区读取并发送给 D P S 。在 D P S 写图像采集板的状态寄存器时, 将状态信息存储到相应控制寄存器。
基于DSP的图像采集系统
基于DSP的图像采集系统作者:毕卫红王娟来源:《现代电子技术》2008年第02期摘要:介绍一种基于复杂可编程逻辑器件(CPLD)和数字信号处理器(DSP)的图像采集系统。
系统采用增强型视频输入处理芯片SAA7111A完成视频信号的A/D转换,利用CPLD实现对视频前端译码后的视频数据的存储,以及完成前端采集与后端处理协调工作的方案。
按照该方法制作的系统,经过实验验证效果良好。
关键词:DSP;CPLD;图像采集;中图分类号:TN911.73 文献标识码:B 文章编号:1004-373X(2008)02-010-(College of Information Science and Engineering,YanshanAbstract:This paper introduced an image collection system based on CPLD and DSP.The system uses enhanced video input processor SAA7111A to accomplish A/D conversion of video signal,and uses CPLD to accomplish the video data′s saving and the project which makes the collection part and the processing part work in phase.A system has been made according to thisKeywords:1 引言随着现代电子技术和多媒体技术的发展,图像采集和处理技术得到了广泛的应用。
DSP芯片具有体积小,处理速度快,使用灵活方便等特点。
基于DSP的图像采集处理系统能较好地满足处理的快速性和小型化便携式的要求。
本文设计了一套基于TI公司TMS320VC5416DSP 芯片的图像采集系统。
基于DSP/BIOS的视频图像采集处理平台软件设计
在 图像 采集 处 理 系统 的设 计 过程 中采用 了 T I开 发
在 C C S中集 成 的 实 时 操 作 系 统 D S P / B I O S。 B I O S是 一 个 可 扩 充 、 可裁 剪 的 R T O S, 主 要 可 以 分 成 分 片 实 时 内核 、实时 评 测 工具 ( R T D X)和 芯 片 自 带 库
这 时不能 对 S WI 、 T S K等线 程操 作 , 因为还 没启 动 B I O S , 仍 没有起 用调 度组 件 , 调用 B I O S _ s t a r t 完 成对 B I O S的 启 动就 可进 入 I D L _ l o o p空 闲 循 环 ,等 待 HWI 、 S WI 、 T S K 等
软 件 设 计 。T MS 3 2 0 C 5 4 0 2作 为 控 制 器 , 主 要 负 责 人 机 交
线程 的就 绪_ 4 ] 。
本 系统 硬件 中 断( HWI ) 有两 个 : 一是 D M6 4 3 7和 C 5 4 0 2 通 信 过 程 所 用 的 Mc B S P,键 盘 数 据 读 入 时 触 发 中 断 ; 另
时视 频 图像信 息的 获取对 于 系统分 析数 据 至关 重要 , 而
且视 频 图像数 据流 量大 , 带 宽 要 求 高 。 嵌 入 式 实 时 处 理
系 统具有 实 时性高 、 体 积小 、 成本 低 、 算 法 移 植 简 单 等 特 点 …。这 类 嵌 入 式 实 时 图 像 处 理 系 统 以 D S P作 为 处 理 器
一
互 界 面 的控 制 ,它 与 T MS 3 2 0 D M6 4 3 7通 过 多 通 道 缓 冲 串
口 通 信 ,控 制 器 主 要 对 键 盘 数 据 的 读 人 和 L C D 数 据 的 输 出 。 同时 系 统 还 添 加 了 远 程 控 制 模 块 ,通 过 P C发 送
基于DSP的最小图像采集处理系统设计
_ 臣 基于 D P的最小 图像采集处理系统设计 S
■ 北 京 航 空 航 天 大 学 戴 春 雷 张 海
关键词
DS 嵌 入 式 系统 图像 采 集 图像 处 理 P
4个 CE 宅 问 , 巾 CE 其 0被 配 置 为 1 6位 同 步 空 , 接
p e ms to. ( 稿 用 a r eec e 投 专 ) p@ n. r n n
Mcc t1s meJ sm 1 i (r1 &E {( S t s r ) 。e 。n r ) e ye dd 9
维普资讯
l l 。
0 A 0 0 0 0。 x 0 0 0
据和 同步信号将 逐渐稳定 。Y通道 和 u/ v通道在分 别经
过 7 HC 4 4 2 4总 线 缓 冲 器 之 后 接 入 E I M F低 1 6位 数 据 总 线 。C 2 与 地 址 线 E 2 、 A 1 经 过 译 码 产 生 2 片 E A0 E 2
DSp OV7 2 60
Y通 道
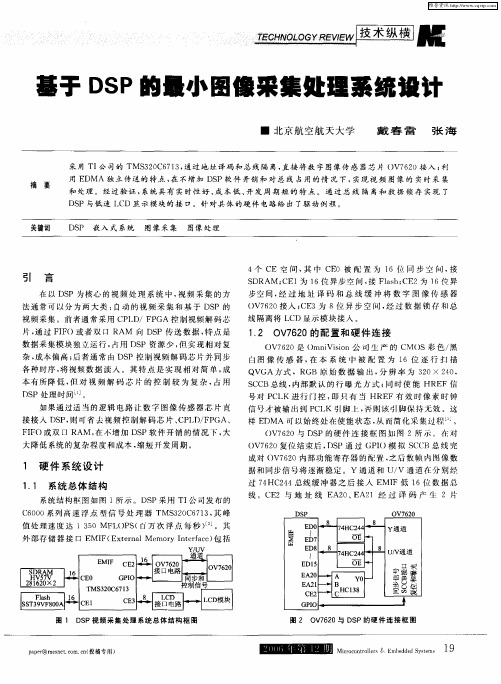
外部 存 储 器 接 口 E F E tra Me oyItr c ) 括 MI ( xen l m r nef e 包 a
UV通 道 /
M
28 0 1 62
H V 2 ・ C O V 7X E 5
l
E 2 MC IE F  ̄
a I pO 叫
l ,P.., 一 -..1 l 同步和 I
磐
峨 l| |t l l| l I | l 2 l t l|
i ! REF Daa S th { f H ( — t— wi ) c
— |
/ *HR FG I 7水 平参 考 中 断 */ E PO
7 HC 4 4 24的 选 通 信 号 , 时 O 7 2 的 读 地 址 为 此 V 60
DSP在图像处理中的应用
DSP在图像处理中的应用与发展班级:姓名:学号:DSP在图像处理中的应用与发展摘要:在过去的几年中,各种各样的数字信号处理方法层出不穷。
数字信号处理器已经成为许多消费、通信、医疗、军事和工业类产品的核心器件。
在实际应用中可以选用的数字信号处理实现方法很多。
但是,数字信号处理器(DSP)以其在处理速度、价格和功耗上的无以替代的优势赢得了大多数用户的信任。
随着信息家电、网络通信和3G移动通信的飞速发展,作为最关键的核心器件的数字信号处理器,将会把人们带人高速信息化的时代。
而基于DSP的数字图像处理技术也随之DSP的发展而不断革新。
图像处理技术最初是在采用高级语言编程在计算机上实现的,后来还在计算机中加入了图像处理器(GPU),协同计算机的 CPU工作,以提高计算机的图形化处理能力。
在大批量、小型化和低功耗的要求提出后,图像处理平台依次出现了基于VLSI 技术的专用集成电路芯片((ASIC)和数字信号处理器((DSP)。
但基于DSP的图像处理系统以其可降低体积、重量与功耗,同时价格也较低,具有较高的可靠性,且易于维修与测试,对噪声与干扰有较强的抗干扰能力,越来越受到了人们的青睐。
图像处理与识别是DSP应用中的一个极其重要的领域。
随着近年来对图像高速实时处理的要求,基于DSP的数字图像处理技术发展迅速,在超声图像、红外图像、天文图像、医疗影像和军事等领域等到了广泛的应用。
其目前主要向着多DSP并行运算、多CPU实时系统、分布式实时系统等方向发展。
而一些新的数学方法像模糊论集的引入、神经网络理论的实用化以及分形几何学的应用尤其是小波变换正逐步应用于处理图像的DSP系统中。
这使得用于图像处理的DSP系统向着集成化、并行化、开发简易化和标准化方向发展。
1 、DSP和图像处理技术的发展概况基于DSP的数字图像处理技术是一种新兴的边缘融合技术,可以通俗的理解为DSP与图像处理的结合,现今,它逐步的走向成熟。
成为一门新兴的学科,越来越多的人们投入到了它的研究中。
基于DSP和FPGA的图像处理系统设计本科毕业设计
中文题目:基于DSP和FPGA的图像处理系统设计外文题目:IMAGE PROCESSING SYSTEM DESIGN BASED ON DSP AND FPGA摘要本文研究了以TI高性能DSP为核心处理器的视频实时图像处理系统的设计原理与组成,并基于DSP + FPGA架构实现了视频图像处理系统。
本图像处理系统主要由图像采集电路、图像处理电路、显示电路以及系统软件组成。
首先经过CCD图像传感器采集复合视频信号,经过视频A/D处理器(SAA7115)转换成8 bit的数字信号,通过DMA方式存放在双口RAM中,该处理器同时还输出像素时钟信号(PCLK),场同步(CS)、行同步(HS)、奇偶场(OE)、复合消隐信号(BLANK)。
数字信号处理器DSP(TMS320VC5501)是本处理器的核心部分,其功能是完成整个系统的图像预处理以及数据流存储时序控制等功能。
经过DSP处理后输出8 bit的数字视频信号以及像素时钟信号(PCLK)、场同步(CS)、行同步(HS),一起送FPGA产生视频信号的时序逻辑,然后送视频D/A处理器(SAA7105H ),最后通过VGA视频接口输出。
静态双口RAM用于存储图像数据的,图像数据的读写控制时序通过DSP来实现。
视频D/A 处理器(SAA7105H)将FPGA输出的数字视频信号、像素时钟、行场同步信号合成为彩色全电视信号然后通过VGA输出。
该视频图像处理系统可以实现实时的数据视频信号的采集、处理及显示,可以应用于视频处理的相关领域。
关键字:DSP;FPGA;图像处理;电路设计;系统软件AbstractThis paper studies the system design principle and composition the of TI high performance DSP core processor for real-time video image processing , and it can achieve video image processing system based on the architecture of DSP and FPGA. The image processing system is composed of image acquisition circuit, image processing circuit, display circuit and system software.After the first CCD image sensor collect the composite video signal, the video A/D processor (SAA7115) is converted into a digital signal of 8 bit, which is stored in dual-port RAM through DMA, the processor also outputs pixel clock signal (PCLK), field synchronization(CS), synchronous (HS), parity field (OE), composite blanking signal (BLANK).DSP digital signal processor (TMS320VC5501) is the core part of this processor, its function is to complete the whole system of image preprocessing and the sequence of data storage control . After DSP treatment, the output of the 8 bit digital video signal and a pixel clock signal (PCLK). The field synchronization (CS), synchronous (HS), which is send to FPGA for producing video signals, then transmitted to the video processor D/A (SAA7105), the final output through a VGA video. Static double port RAM is used to store the image data, the timing control of image data read and writed is realized by DSP. Video D/A processor (SAA7105) compose output digital video signal, a pixel clock and field synchronization signal of FPGA into color TV signal and then output by VGA.The video image processing system can achieve real-time data of the video signal acquisition, processing and display, which can be applied for video processing related fields.Keywords:DSP;FPGA;image processing ;circuit design ;system software目录0 前言 (1)1 绪论 (2)1.1 课题的提出及研究的背景 (2)1.2 研究的目的和意义 (2)1.3 课题研究的主要内容及重点 (3)2 系统总体设计方案 (5)2.1 系统硬件原理框图设计 (5)2.2 系统主要工作模块划分及工作流程 (5)2.2.1 模块划分 (5)2.2.2 系统工作流程 (6)3 图像采集电路设计 (8)3.1 数字图像基础知识 (8)3.1.1 彩色图像空间模型的空间变换 (8)3.2 数字图像传感器V220 (9)3.3 视频解码器SAA7115及I2C控制电路 (10)3.3.1 I2C控制电路 (11)3.3.2 采集解码电路 (11)4 DSP和FPGA为核心的电路设计 (13)4.1 可编程逻辑器件FPGA及DSP处理器概述 (13)4.2 DSP外围电路设计 (14)4.2.1 DSP外部数据存储器和外部程序存储器设计 (15)4.2.2 DSP时钟电路设计 (17)4.2.3 UART接口设计 (18)4.3 以FPGA为核心的电路设计 (20)4.3.1 XC3S100E-4TQ144C管脚功能特性 (21)4.3.2 FPGA外围电路设计 (21)5 系统软件设计 (26)5.1 软件实现的总体方案 (26)5.2 DSP外部数据和程序存储器的读写时序 (28)5.3 DSP内部时钟电路配置 (31)5.4 UART初始化程序设计 (33)5.5 DSP中的I2C模块配置 (34)5.6 FPGA(XC3S100E-4TQ144C)配置模式 (36)6结论 (38)致谢 (39)参考文献 (40)附录A译文 (41)附录B外文文献 (47)附录C电源电路 (54)附录D复位电路 (56)XX大学毕业设计(论文)0 前言视频图像处理[1]作为一种重要的现代技术,己经在通信、航天航空、遥感、遥测、生物医学、军事、信息安全等领域得到广泛的应用,视频图像处理实现技术对相关领域的发展具有深远意义。
基于DSPC64x的视频图像采集与处理系统
越 来越 广泛 。考虑 到 D P易 于满足 图像 处理 中运算 量大 、 时性强 、 S 实 数据 传输 速率 高 等要求 , 文设 计 本
一
种 以 DM6 2为核 心处 理器 的 图像 采集 与处理 系统 。 系统 可有效 利用 DS 4 该 P优势 , 加上 图像处 理 的算
法, 即可满 足水 天线 实 时 图像采 集 、 码 、 编 解码 等方 面 的需 要 。系统 采 用现 场可 编 辑逻 辑 门阵 列 F GA P 进 行接 口设 计 , 码/ 编 解码 的实现 采用专 用芯 片 S AA7 O / AA7 1 , 而 提高 了系统 的运行 效率 。 15S 15从 ]
生 器里 面有八 个辅 助 寄存 器 和两个 辅 助寄存 器算术 单元 ( AU) AR 。
3 基 于 DS C6 x的视 频 图像 采 集 与 处 理 系统 的硬 件 平 台 P 4
视频 图像 采 集与 处理 系统 主要 是完 成 图像数 据 采集 / 回放 、 压缩 / 压 , 解 图像 处理 , 以及 与 计算 机 接 口之 间的双 向通讯 。 照这个 设计 目标 , 8 b s比特率 的 图像 数据 、 长为 1 ms的情况 下 , 少需 要 按 在 k/ 帧 0 最 2 MI S的运算 量 。因为 8 个 样值 是 0 P 0
T MX MD6 2 B A5 8封装 ; 4 ,G 4 工作 电压 :/ 为 3 3 核 电压 为 1 4 内部工作 时 钟为 6 0 I0 . V, . V; 0 MHz
( . 7 s ; 算 能 力 :. 16n )计 4 8亿 条 指 令 每秒 ; 部 总线 时 钟 : 0 MH ; D 外 1 0 z S RAM MI ON E F为 4 ×6 bt ; M 4i s
基于DSP和CPLD的视频图像采集处理的设计与实现
化 。 系统设 计 是 有 效 和 可 行 的 。
关 键词 : 频信 号 采 集 ; 视 图像 处理 ; TMS 2 V 4 6处 理 器 ; 编 程 逻 辑 器 件 ; 频 解码 芯 片 TV 5 5 3 O C5 1 可 视 P 1O 中 图分 类 号 : TN9 1 T 3 1 1 ; P 9 文 献标 识 码 : A
p o e sn .Fi a l r c s ig nl y,t e v d o i g c u sto h i e ma e a q i i n,s o a e a d t a s s i n,e g e e t n a d i t r g n r n miso d ed tc i n o
pr g a m a l og c d vc o rm b e l i e ie,a d g t lsg lp oc s o i ia i na r e s r,a t rde c s The p i i e a h nd o he vie . rncpl nd t e
De i n a a i a i n o de m a e Ac uiii n a s g nd Re lz to f Vi o I g q s to nd Pr c s i g Ba e n DS a o e s n s d o P nd CPLD
Zh u C a g i o h n l n,Ch n n a g Qigme ,Ja i o g i in L h n
基于DSP和FPGA的实时图像采集处理系统的设计
Ab s t r a c t :T h i s p a p e r p r e s e n t s a r e a l - t i me e mb e d d e d p l a t f o r m f o r i ma g e a c q u i s i t i o n a n d p r o c e s s i n g ,w h i c h i s b a s e d o n DS P,
ma g e Pr o c e s s i n g an d Mu l t i me di a Te c h n ol og y
基于 D S P和 F P G A的实时图像采集处理系统 的设计 水
戴 权 , 杨应 平 ’ , 贾信 庭 , 陈 梦 苇 , 李志强
( 1 . 武 汉理 工 大 学 理 学 院 , 湖北 武 汉 4 3 0 0 7 0;
F P GA a n d ARM9,f o r t h e r e q u i r e me n t s a b o u t h i g h - s p e e d a n d p o r t a b i l i t y .T h e d e s i g n ma i n u s e s S o P C o f F P GA t o c u s t o mi z e N i o s l I
( 1 . S c h o o l o f S c i e n c e, Wu h a n Un i v e r s i t y o f T e c h n o l o g y, Wu h a n 4 3 0 0 7 0, C h i n a; 2 . S c h o o l o f I n f o r ma t i o n En g i n e e r i n g, Wu h a u Un i v e r s i t y o f T e c h n o l o y , g Wu h a n 4 3 0 0 7 0, C h i n a )
基于DSP的嵌入式图像识别系统设计与实现

文 章 编 号 :0 2 8 9 (0 6 0 — 0 2 0 10 — 6 2 2 0 ) 2 0 8 - 3
基于 D P的嵌入式图像识别系统设计与实现 木论 ・ S 文 ・
王孝 国 ,张雄 伟
( 国人 民 解 放 军理 工 大 学 通信 工 程 学 院 ,江 苏 南 京 2 0 0 ) 中 107
e p rme t rs l t r s n e . xe i n u t a e p e e td e s
【 y w r s m g r es g nvr lsr lb s otaeot zt n fc cg io Ke o d 】i ae po si ;uies e a u;sf r pi ao ; aer ont n c n a i w mi i e i
,
US c mmu ia in mo e r mp a i d n t i a e .F n l ,t e a p i ain o a e r c g i o a e n he s se a d t e B o n c t d l a e e h sz i h s p p r i al h p l t f fc o t n b s d o t y t m o e y c o e n i n h
1 引 言
图像识 别技 术在 国家安 全 、 事安 全 、 安 、 法 、 军 是 系 统 的 核 心 , 它 由 1 公 司 的 ’ I T 3 0 一 5 91来 实 现 。 MS 2 C 5 0 t1 . 2 识别 系统 的工作 流程 : 系统 上 电 后 ,A 7 1m 摄 S A l1对
交 通 、金 融 和 芯 片 检 测 制 造 等 领 域 具 有 极 广 阔 的应 用 前 景。 由于 图像 识 别 难 度 高 , 术 复 杂 , 技 准确 率 较 低 , 尚 未 故
基于DSP和CPLD的掌纹图像采集系统设计
基于 D S P和 C P L D 的掌纹图像采集 系统设计
温 贺 平 ,戴 青 云 ( 1 .东 莞 职 业 技 术 学 院 教 育 技 术 中 心 ,广 东 东 莞 5 2 3 8 0 8 ; 2 .广 东 工 业 大 学 信 息 工 程 学 院 ,广 东 广 州 5 1 0 0 9 0 )
( 1 .E d u c a t i o n T e c h n o l o g y C e n t e r ,Do n g g u a n P o l y t e c h n i c ,D o n g g u a n 5 2 3 8 0 8 ,Ch i n y o f I n f o r m a t i o n E n g e e r i n g ,G u a n g d o n g U n i v e r s i t y o f T e c h n o l o g y , G u a n g z h o u 5 1 0 0 9 0 , C h i n a )
时、 高性 能 的 掌纹 采 集 系统 。 实践 证 明 , 该 图像 采 集 系统 运 行 稳 定 、 可靠 , 具 有 一 定 的 应 用推 广性 和 参 考 价值 。
关 键 词 :掌 纹 ; 图 像 采 集 ;D S P ;C P L D
中 图 分 类 号 :T P 3 9 1 , T P 9 1 1 . 7 3 文 献 标 识 码 :A 文 章 编 号 :1 6 7 4 — 7 7 2 0 ( 2 0 1 3 ) 2 0 — 0 0 4 2 — 0 2
摘 要 :针 对 掌 纹 识 别 系 统 中 的 图 像 采 集 问题 , 提 出 了一 种基 于 D S P和 C P L D 的 掌 纹 图像 采 集 系 统 的设 计 方 法 。将 D S P的 特 殊设 计 结构 作 为 算 法 处理 核 心 , 对 掌 纹 图像 进 行 采 集 、 存 储 和 处 理 。 采 用 O V 7 6 2 0作 为 掌 纹 传 感 器 ,并 利 用 C P L D 完成 D S P与 O V 7 6 2 0之 间 的 逻 辑 信 号 转 换 , 设 计 出 了 一 套 实
基于DSP的DMA嵌入式图像采集系统设计
言
在图像采集系统中 需选用高速 数据存储 器
处理技术得到了 越来越广 泛的应用。由于 D SP 和 CPLD 芯片具有体积小、 处理速度快、 使用方便 灵活的特点, 已被广泛应用于对处理速度和实时 性要求较高的嵌入式场合。笔者以 D SP 为主 处 理器, 由 CPLD 产生所需的时序和各种逻辑组合, 对采集的图像信号进行处理, 再配以图像解码芯
在图像信号采集系统中, 核心器件为 PA L 制 式的 CCD 摄像头, 视频解码芯片, 高速大容量的 SR A M 和可编程逻辑器件 ( CPLD ) 。
CCD 摄像头输出的是 � PA L 制式的模拟信号, 择。笔者选用 TI 公司的 TM S3 20 C5 416 , 该芯片 通过解码芯片对其进行解码, 变成可编程的数字 � � 的指令周期为 6 . 25 , 且片内采用并行的流水线 信号。由于采用一路模拟输入, 系统选用 PHI L指 令 处 理 方 式, 速 度 上 完 全 可 以 达 到 要 求。 I PS 公司的 SA A7 � � 111 作为解码芯片, � � � 将 PA L 制式 TM S3 20 C5 416片 内集 成了 8 块 8 16 的 的模拟视频信号转换为 � � � U 422 格式的数字图像 SA R AM 和 8 块 8 16 的 DAR AM , 片上数据 信号输出。 系统中由可编程逻辑器件实现图像采集的时 序控制, 因此要求可编程逻辑器件实时性好、 执行 存储容量高达 128 字, 在本系统的设计中有足够 的片内数据空间来存储采集到的图像数据, 特别 是该芯片片上集成了 6个 D M A 通道, 为系统采用
[1] 片一起组成图像采集与处理系统 � � 。 间为 4 M , 存取速度最慢为 15 , 满足了系统 的要求。
dsp图像处理实验报告

dsp图像处理实验报告DSP图像处理实验报告一、引言数字信号处理(DSP)是一种用于处理数字信号的技术,广泛应用于各个领域。
图像处理是DSP的一个重要应用,通过对图像进行数字化处理,可以实现图像增强、边缘检测、目标识别等功能。
本实验旨在通过DSP技术对图像进行处理,探索图像处理算法的实际应用。
二、实验目的1. 了解数字信号处理在图像处理中的应用;2. 掌握DSP平台的基本操作和图像处理算法的实现;3. 进一步熟悉MATLAB软件的使用。
三、实验环境和工具本实验使用的DSP平台为TMS320C6713,开发环境为Code Composer Studio (CCS)。
图像处理算法的实现主要依赖于MATLAB软件。
四、实验步骤1. 图像采集与预处理首先,通过CCD摄像头采集一张待处理的图像,并将其转化为数字信号。
然后,对图像进行预处理,包括去噪、灰度化等操作,以提高后续处理的效果。
2. 图像增强图像增强是指通过一系列算法和技术,提高图像的质量、清晰度和对比度。
在本实验中,我们采用了直方图均衡化算法对图像进行增强。
该算法通过对图像像素值的统计分析,调整像素值的分布,使得图像的对比度更加明显,细节更加突出。
3. 边缘检测边缘检测是图像处理的重要环节,可以用于目标识别、图像分割等应用。
在本实验中,我们采用了Canny算法进行边缘检测。
Canny算法是一种经典的边缘检测算法,通过对图像进行多次滤波和梯度计算,得到图像的边缘信息。
4. 目标识别目标识别是图像处理中的关键任务之一,可以应用于人脸识别、车牌识别等领域。
在本实验中,我们以人脸识别为例,使用了Haar特征分类器进行目标识别。
Haar特征分类器是一种基于图像特征的分类器,通过对图像进行特征提取和分类器训练,可以实现对目标的快速准确识别。
五、实验结果与分析通过对图像进行处理,我们得到了增强后的图像、边缘检测结果和目标识别结果。
经过对比分析,我们发现图像增强算法能够有效提高图像的对比度和清晰度,使得图像更加易于观察和分析。
基于DSP的图像采集与处理的硬件设计
作 电 压 是28 V 采 用A S l- . 5 .5, M l7 28 的线 l 急压电 源 变换 芯片 , l v 蜩 ; 5  ̄
它 很 多消 费者 产品 和工 业应 用 的 明智 选 择 。
此部 分 模块 包 括 时钟 振 荡模 块 、 内存 扩 展 模 块、 T 6 真 模 J A仿
D P 术 已成 为人 们 日益 关 注 的 并 得 到 迅 速 发 展 的 前 沿 技 S技 术 。而 基 于 D P 图 像 处 理 设 计 简 便 、 活 , 合 于 新 型 产 品 的 S的 灵 适
研 究 开发 。 设 计 结 合 以 上 发 展 现 状 分 析 , 定 采 用 通 用D P 本 决 S 芯 片 来 设 计 图 像 处 理 系统 的硬 件 部分 。 论 文 主 要 研 究 以低 端 嵌 该 入 式微 处 理 器 T S 2 L 2 0 A 核 心 的图 像 采 集 处 理 系 统 的 硬 M 3 0 F 4 7为
T S 2 L 2 0A =I 司 2 0 年 7 M 30 F 4 7 ̄T公 0 2 月新 推 出 的 L 2 0 系 列 芯 F4x
压 器 的 输 出 电 压 以便 检 测 稳 压 的输 出 电 压 的 欠 压 状态 。 果 出 如 为 低 电平。 出现 欠 情况 的期 间 内, E E { 号 保 持 在低 电 平。 在 RS T g
一
该 方 案 具 有 性价 比 高 , 实用 性 强等 优 点 , 可 广 泛 应 用 于基 于低 端 嵌 入 式 图像 采 集处 理 的 系统 中 ,可 以直 观 地 监 测控 制 对 象 。该 方 案 还 可 以 进 步 实现 许 多扩 展 功 能 ,如 电机 控 制 、机 器 :数 字 图像 处 理
基于DSP的数字图像处理综合实验系统的研制
系统提供 足够 的功率及 稳定的工作 电压 ,以满 足系统 的正常工作 ,本实验单独设计 了一个供 电电路提供 给 扩展接 口使用 , 不会担心 扩展 电路模块 以后 , 电源无法
大, 在设计 本实验 系统 的时 候 , S 的大部 分引脚 以 将D P 及 CL P D的 闲 置 引 脚 都 扩 展 出 来 ,本 实 验 系 统 的
公 司 的T 30 c5 【 P 并 采 用XII e司 的 C L Ms 2 v 4) DS , 2 LNX ̄ . v , P D芯 片作 为 实验 系统 的控 制 芯 片 , 士 通 公 司的 MB 20 富 F 0
指纹传感芯 片采集指纹 图像 , 能够进行指纹 图像的采集 以及处理实验 。 实验 系统除 了可以进行数 字图像 处理的 本 实验 , 还可以进行 一些常规DS 的 实验 。由于CP D的管脚功能可 以通过编程进行重新定 义, 用者能够更加容 易 P L 使
一
干扰 。( ) 中去耦 电容 的合理配置 。配置去耦 电容 3电路 可 以抑制 因电路状态 变化而产生 的噪声 ,是 系统 电路
稳定性设计 的一种常规做法 。本实验系统在设计时 , 在 电源的输 入端跨接 一个 1u 的电解 电容器 ,并 且在每 0F
一
低 了学校购买实验仪器 的成本 。 实验 系统 总体 结构 设计
的根 据 自己 的需 求 , 实验 系统进 行 二 次开 发 , 对 完成 自主创 新 设 计 。 关 键 词 : 字 图像 处理 ; P 实验 系统 ; F 0 数 DS ; MB 2 0
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
摘 要: 介绍了一种利用CCD摄像头、SAA7111视频解码芯片、高速可读写存储器SRAM,基于DSP与CPLD的图像采集与处理系统。系统完成了图像的快速采集、存储及数据处理。文章详细论述了系统的总体结构、部分硬件设计,简要叙述了相应图像算法的实现方法。给出了系统实例和实验结果。 关键词: DSP;图像采集;图像处理;边缘提取
2.4 I2C总线 由于SAA7111和AL250都是利用I2C总线进行初始化编程及方式选择,因此需要用单片机的模拟I2C总线接口,从而实现单片机对SAA7111和AL250的初始化与控制。将单片机的P1.2、P1.3设为I2C总线的两条线SCL、SDA;P3.4、P3.5设置为CPLD与AT89C2051控制线的交换接口,CPLD通过这两条线设置单片机的I2C总线控制量;利用P1.6、P1.7的两个I/O口可以对整个系统的操作过程人为进行控制。I2C总线电路原理图,系统执行上电加载DSP程序、初始化程序后,用I2C初始化SAA7111及AL250芯片。然后DSP即发送开始采集指令给CPLD,实现总线控制权的交接,CPLD获得总线控制权。通过CCD采集一帧图像,利用SAA7111进行数字视频解码,存储到SRAM中。当一帧数据写入帧缓存后,CPLD关闭SAA7111A的视频输出,放弃总线控制权,并发送信号给DSP,通知DSP进入图像处理程序。DSP通过CPLD及缓冲器从SRAM中取得时钟视频数据,同时将数据通过AL250视频编码芯片在CRT显示器上显示。
2.2 存储器SRAM 本文采集的图像数字像素数据为720×576=414 720个像素点,又因为数字视频格式是YUV422格式,每个像素点占用16 bit个存储空间,所以一副图像的存储空间最少需要420 K×16 bit的存储器空间。 所以选用的存储器是用两片512 K×8 bit存储器合并在一起产生512 K×16 bit的存储空间,可以适用本方案的需要。 因为原输入的CVBS视频信号时采用隔行扫描的方式,所以解码后产生的数据先是奇数行的视频数据,然后才是偶数行的数据,以奇偶场信号RST0和场参考(VREF)信号为标志。为了后期对数据的处理方便,本系统在存储数据时将奇偶行信号合并存储,。
图像采集处理系统大都基于摄像机、图像采集卡和计算机,图像理解和处理算法全部以软件方式实现。这是因为实时数字图像处理信息量和计算量大,而大多数采集卡基于成本考虑没有处理器和大容量的存储器,绝大部分任务必须依靠计算机来完成。但是,这种计算机参与的系统在工业或军事等复杂环境下应用极为不便。基于这种要求,许多专用图像处理系统应运而生[1]。 随着数字图像处理系统在当今工业及医疗领域的应用日益广泛,对图像处理系统的实时性和准确性也提出了更高的要求。而一个完整的视频图像处理系统不但要具备图像信号的采集功能,还要求能对图像进行实时显示,且要求完成图像信号的分析及处理算法。通常这些算法的运算量大,同时又要满足实时显示要求。DSP芯片以其适应于高速数字信号处理的内部结构,在图像处理领域得到不可替代的地位。1 系统的结构框图 本系统采用CCD摄像头、视频解码芯片SAA7111、CPLD、高速可读写存储器SRAM、AL250、缓冲器SN74LVC16245及数字信号处理器DSP等核心部件。由于采集的是一幅静态图像,所以选择了TI公司C54X系列的TMS320VC5416作为系统的核心处理器。系统框图。
系统采用主从结构,其中单片机是主机,主要负责系统工作的协调及利用I2C对SAA7111及AL250初始化。DSP作为从机,主要完成图像的算法处理。这样,在充分发挥单片机在任务调度方面优势的同时,也发挥了DSP在数字信号处理方面的优势,可以专注地完成图像处理,使系统的效率达到最优。CPLD是用来最终完成图像采集的器件,实质上起到了总线控制器的作用,通过编写的VHDL程序实现系统要求。 图像采集是通过CCD图像传感器采集一帧PAL制的视频图像,利用视频解码芯片SAA7111将它转化为数字视频数据,通过CPLD将图像数据存储到SRAM中,DSP通过CPLD将数据从SRAM中读到内部数据存储器中,然后对其进行算法上的处理,再把经过处理后的数据又存储到SRAM中去。通过AL250将YUV格式的数字视频图像数据转换成RGB格式的数字视频数据,在CRT显示器上显示。2 系统硬件 DSP主要应用在图像算法的实现上。系统选用TI公司C54系列的TMS320VC5416芯片。它的程序ROM为16 K字,RAM为128 K字,1个并行口,3个多通道缓冲串口,设备电压3.3 V,核心电压1.6 V,指令周期为6.25ns[2]。2.1 系统前端图像采集 图像获取模块处于系统最前端,其性能的优劣将直接影响整个系统视频图像信号的质量。因为本文还要对采集的图像做后期处理,对图像的成像质量要求比较高,所以采集设备选用CCD摄像头。 由于CCD的视频输入信号是PAL制模拟信号,所以需要视频解码芯片将模拟信号转换成数字视频信号数据,通过解码芯片对其进行解码,变成可编程的数字信号。 SAA7111是Philips半导体公司生产的一种视频输入处理器,在视频采集系统中,通常需要这类的视频解码器作为视频前端。将PAL制式的模拟视频信号转换为YUV格式的数字图像信号输出。它采用CMOS工艺,其功耗小、电压低、体积小、温度适应范围广,具有以下特点: (1)四路模拟输入信号通道,如(4*CVBS,2*Y/C)或者(2*CVBS,1*Y/C); (2)所有不同的制式标准只需同一频率的晶振(24.576 MHz); (3)自动进行50/60 Hz场频的检测,自动进行标准PAL制式和NTSC制式之间的转换; (4)具有实时状态信息输出; (5)数据输出格式多样,具体格式如下:4:1:1的YUV格式(12位)、4:2:2的YUV格式(16位)、4:2:2的YUV格式[按照CCIR—656标准](8位)、5:6:5的RGB格式(16位)、8:8:8的RGB格式(24位); (6)可通过I2C总线接受外部控制器的完全控制。 在本系统中,将图像解码后的输出数字视频数据设计为YUV422(16 bit)格式,分辨率为768×625,每行的有效数据为720个像素点,每个像素点占用16 bit的存储空间。其中每个像素点包含一个亮度信号(Y),两个色差信号(U分量、V分量)。其中“Y”表示明亮度(Luminance或Luma),也就是灰阶值;而“U”和“V”表示的则是色度(Chrominance或Chroma),作用是描述影像色彩及饱和度,用于指定像素的颜色。以四个像素点为例,解码后产生的YUV422的格式数据与其原图像数据及其显示图像数据如下: 原图的四个像素为:[Y0 U0 V0] [Y1 U1 V1] [Y2 U2 V2] [Y3 U3 V3] YUV422存放的码流为:Y0 U0 Y1 V1 Y2 U2 Y3 V3 映射出的四个像素为:[Y0 U0 V1] [Y1 U0 V1] [Y2 U2 V3] [Y3 U2 V3] SAA7111在将视频信号解码的同时,另外还输出行参考HREF、场参考VREF、行同步HS、 场同步VS、行锁定信号LLC(27M) 、像素时钟信号LLC2(13.5 MHz)、时钟参考信号CREF(相对LLC2有一定的延时)、奇偶场信号RST0等。这些信号与解码后的数字视频数据一起输入到CPLD中,CPLD由这些信号产生像素信号在SRAM中的存储地址信号和写控制信号。当存储完一帧图像数据时,CPLD就不再向SRAM 存储数据,并通知DSP进入图像处理的运算。SAA7111的硬件原理图见图2。
本文给出了基于DSP和CPLD结构的图像采集和处理系统的一种设计方法。描述了系统的CCD+CPLD+DSP的硬件构成框图。利用CCD和SAA7111进行前端的视频采集,SRAM作为帧存储器,AL250作为图像的编码显示,AT89C2051模拟I2C总线对SAA7111及AL250进行初始化,CPLD实质上起总线控制器的作用,DSP只作图像算法使用,图像采集独立自主进行,不参与采集过程,节省了DSP的时间,实时性好,实现了模块化设计的思想。系统在软件上对图像实现了灰度、边缘提取、反色的算法。 该系统工作速率高、实时性强、结构清晰、智能度高,具有在线可编程的特点。且以它作为硬件平台编写图像处理的算法方便。该系统在实际中可以应用于视频图像监控、图像自动检测、医疗及军事检测等场所。系统的软、硬件环境已通过应用性、稳定性等测试,具有良好的市场前景。
2.3 视频编码 因为要在CRT显示器上实时显示出采集的图像和经过算法处理过的图像,CRT显示器的数据显示格式为逐行显示的VGA信号,所以需要将YUV格式转换成RGB格式。本文选用一个专用的视频编码芯片AL250来实现,这样可减少软件设计的复杂度。虽然在硬件上增加了系统复杂度,但却使系统的模块化设计更加清楚,流程更简洁,接口的设计也简单了。 AL250是AVER Logic公司生产的一款显示转换控制芯片,主要用于LCDVGA显示。它能够接收隔行NTSC或PAL、ITU-RBT601(CCIR601)或平方像素、YUV422或RGB565数字信号,将其转换成普通CRT显示器可以接收的模拟RGB格式视频信号RGB565格式的逐行数字视频信号。AL250有多种控制功能,可由微处理器通过I2C接口控制。该芯片供电电压为3.3 V或5 V,采用64引脚QFP封装形式。AL250电路原理图。