蚁群算法外文翻译
蚁群算法
蚁群算法目录1 蚁群算法基本思想 (1)1.1蚁群算法简介 (1)1.2蚁群行为分析 (1)1.3蚁群算法解决优化问题的基本思想 (2)1.4蚁群算法的特点 (2)2 蚁群算法解决TSP问题 (3)2.1关于TSP (3)2.2蚁群算法解决TSP问题基本原理 (3)2.3蚁群算法解决TSP问题基本步骤 (5)3 案例 (6)3.1问题描述 (6)3.2解题思路及步骤 (6)3.3MATLB程序实现 (7)3.1.1 清空环境 (7)3.2.2 导入数据 (7)3.3.3 计算城市间相互距离 (7)3.3.4 初始化参数 (7)3.3.5 迭代寻找最佳路径 (7)3.3.6 结果显示 (7)3.3.7 绘图 (7)1 蚁群算法基本思想1.1 蚁群算法简介蚁群算法(ant colony algrothrim ,ACA )是由意大利学者多里戈(Dorigo M )、马聂佐( Maniezzo V )等人于20世纪90初从生物进化的机制中受到启发,通过模拟自然界蚂蚁搜索路径的行为,提出来的一种新型的模拟进化算法。
该算法用蚁群在搜索食物源的过程中所体现出来的寻优能力来解决一些系统优化中的困难问题,其算法的基本思想是模仿蚂蚁依赖信息素,通过蚂蚁间正反馈的方法来引导每个蚂蚁的行动。
蚁群算法能够被用于解决大多数优化问题或者能够转化为优化求解的问题,现在其应用领域已扩展到多目标优化、数据分类、数据聚类、模式识别、电信QoS 管理、生物系统建模、流程规划、信号处理、机器人控制、决策支持以及仿真和系统辩识等方面。
蚁群算法是群智能理论研究领域的一种主要算法。
1.2 蚁群行为分析EABCDF d=3d=2 m=20 t=0AB C Dd=3d=2 m=10 m=10t=11.3 蚁群算法解决优化问题的基本思想用蚂蚁的行走路径表示待优化问题的可行解,整个蚂蚁群体的所有路径构成待优化问题的解空间。
路径较短的蚂蚁释放的信息量较多,随着时间的推进,较短路径上积累的信息浓度逐渐增高,选择该路径的蚂蚁个数愈来愈多。
蚁群算法概述
蚁群算法概述一、蚁群算法蚁群算法(ant colony optimization, ACO),又称蚂蚁算法,是一种用来寻找最优解决方案的机率型技术。
它由Marco Dorigo于1992年在他的博士论文中引入,其灵感来源于蚂蚁在寻找食物过程中发现路径的行为。
蚂蚁在路径上前进时会根据前边走过的蚂蚁所留下的分泌物选择其要走的路径。
其选择一条路径的概率与该路径上分泌物的强度成正比。
因此,由大量蚂蚁组成的群体的集体行为实际上构成一种学习信息的正反馈现象:某一条路径走过的蚂蚁越多,后面的蚂蚁选择该路径的可能性就越大。
蚂蚁的个体间通过这种信息的交流寻求通向食物的最短路径。
蚁群算法就是根据这一特点,通过模仿蚂蚁的行为,从而实现寻优。
这种算法有别于传统编程模式,其优势在于,避免了冗长的编程和筹划,程序本身是基于一定规则的随机运行来寻找最佳配置。
也就是说,当程序最开始找到目标的时候,路径几乎不可能是最优的,甚至可能是包含了无数错误的选择而极度冗长的。
但是,程序可以通过蚂蚁寻找食物的时候的信息素原理,不断地去修正原来的路线,使整个路线越来越短,也就是说,程序执行的时间越长,所获得的路径就越可能接近最优路径。
这看起来很类似与我们所见的由无数例子进行归纳概括形成最佳路径的过程。
实际上好似是程序的一个自我学习的过程。
3、人工蚂蚁和真实蚂蚁的异同ACO是一种基于群体的、用于求解复杂优化问题的通用搜索技术。
与真实蚂蚁通过外激素的留存/跟随行为进行间接通讯相似,ACO中一群简单的人工蚂蚁(主体)通过信息素(一种分布式的数字信息,与真实蚂蚁释放的外激素相对应)进行间接通讯,并利用该信息和与问题相关的启发式信息逐步构造问题的解。
人工蚂蚁具有双重特性:一方面,他们是真实蚂蚁的抽象,具有真实蚂蚁的特性,另一方面,他们还有一些在真实蚂蚁中找不到的特性,这些新的特性,使人工蚂蚁在解决实际优化问题时,具有更好地搜索较好解的能力。
人工蚂蚁与真实蚂蚁的相同点为:1.都是一群相互协作的个体。
蚁群算法的原理与应用论文

蚁群算法的原理与应用论文引言蚁群算法(Ant Colony Optimization,简称ACO)是一种模拟蚂蚁觅食行为的优化算法。
它源于对蚂蚁在寻找食物过程中的集体智能行为的研究,通过模拟蚂蚁在寻找食物时的信息交流和路径选择,来寻求最优解。
蚁群算法具有全局搜索能力、自适应性和高效性等特点,被广泛应用于各个领域的优化问题求解中。
蚁群算法的原理蚁群算法的原理主要包括蚂蚁行为模拟、信息交流和路径选择这三个方面。
蚂蚁行为模拟蚂蚁行为模拟是蚁群算法的核心,它模拟了蚂蚁在寻找食物时的行为。
蚂蚁沿着路径前进,释放信息素,并根据信息素的浓度选择下一步的移动方向。
当蚂蚁在路径上发现食物时,会返回到蚂蚁巢穴,并释放更多的信息素,以引导其他蚂蚁找到这条路径。
信息交流蚂蚁通过释放和感知信息素来进行信息交流。
蚂蚁在路径上释放信息素,其他蚂蚁在感知到信息素后,会更有可能选择这条路径。
信息素的浓度通过挥发和新的信息素释放来更新。
路径选择在路径选择阶段,蚂蚁根据路径上的信息素浓度选择移动的方向。
信息素浓度较高的路径更有可能被选择,这样会导致信息素逐渐积累并形成路径上的正反馈。
同时,蚂蚁也会引入一定的随机因素,以增加算法的多样性和全局搜索能力。
蚁群算法的应用蚁群算法已经在各个领域得到广泛的应用,下面列举了几个常见的领域:•路径规划:蚁群算法能够用于求解最短路径和最优路径问题。
通过模拟蚂蚁寻找食物的行为,可以得到最优的路径解决方案。
•旅行商问题:蚁群算法被广泛应用于旅行商问题的求解中。
通过模拟蚂蚁的行为,找到最优的旅行路径,使得旅行商能够有效地访问多个城市。
总结蚁群算法是一种模拟蚂蚁觅食行为的优化算法,通过模拟蚂蚁的行为和信息交流,来寻找最优解。
蚁群算法具有全局搜索能力、自适应性和高效性等特点,在各个领域都得到了广泛应用。
未来,随着对蚁群算法的深入研究和改进,相信它会在更多的优化问题求解中发挥重要作用。
以上是关于蚁群算法的原理与应用的论文,希望对读者有所帮助。
04蚁群算法ACA
导言蚁群算法是20世纪90年代发展起来一种模仿蚂蚁群体行为的新的智能优化算法。
意大利学者Dorigo M等人提出一种模拟昆虫王国蚂蚁群体觅食行为方式的仿生优化算法——蚁群算法(Ant Colony Algorithm,ACA)。
该算法引入正反馈并行机制,具有较强的鲁棒性、优良的分布式计算机制、易于与其他方法结合等优点。
目前蚁群算法已经渗透到各个应用领域,从一维静态优化问题到多维动态优化问题,从离散问题到连续问题。
蚁群算法解决了许多复杂优化和经典NP-C问题,展现出优异的性能和广阔的发展前景。
基本蚁群算法的原理基本蚁群算法(Ant System,AS)是采用人工蚂蚁的行走路线来表示待求问题可行解得一种方法。
每只人工蚂蚁在解空间中独立的搜索可行解,当它们碰到一个还没有走过的路口时,就随机挑选一条路径前行,同时释放出与路径长度有关的信息素(pheromone) 。
路径越短信息素的浓度就越大。
当后继的人工蚂蚁再次碰到这个路口的时候,以相对较大的概率选择信息素较多的路径,并在“行走路径”上留下更多的信息素,影响后来的蚂蚁,形成正反馈机制。
随着算法的推进,代表最优解路线上的信息素逐渐增多,选择它的蚂蚁也逐渐增多,其他路径上的信息素却会随着时间的流逝而逐渐消减,最终整个蚂蚁在正反馈机制的作用下集中到代表最优解的路线上,也就找到了最优解。
在整个寻优过程中,单只蚂蚁的选择能力有限,但蚁群具有高度的自组织性,通过信息素交换路径信息,形成集体自催化行为,找到最优路径。
蚁群优化算法中,每个优化问题的解都是搜索空间的一只蚂蚁,蚂蚁都有一个由优化的目标函数决定的适应度函数值(与释放的信息素成正比) ,蚂蚁根据周围信息素的多少决定搜索方向,并在搜索过的路径上释放信息素以影响别的蚂蚁。
优缺点分析ACA 具有如下优点:(1)ACA 是一种正反馈算法,这是蚁群算法最显著的特点;(2)ACA 本质上一种分布式并行算法。
(3)ACA 具有较好的全局寻优特性。
蚁群算法概述
若继续进行,则按信息素的指导,最终所有的蚂蚁会放弃ACD路线,而都 选择ABD路线。这也就是正反馈效应。
四:自然蚁群与人工蚁群算法
蚁群算法 (Ant Colony Optimization,ACO)
一:蚁群算法的由来
蚁群算法的由来:蚂蚁是地球上最常见、数量最多的昆虫种类之一, 常常成群结队地出现在人类的日常生活环境中。这些昆虫的群体生物智能特 征,引起了一些学者的注意。意大利学者M.Dorigo,V.Maniezzo等人在观察 蚂蚁的觅食习性时发现,蚂蚁总能找到巢穴与食物源之间的最短路径。
蚁群算法有两个阶段:适应阶段和协作阶段.在适 应阶段各候选解根据积累的信息不断调整自身结构;在 协作阶段,候选解之间通过信息交流,以期产生性能 更好的解。
蚁群算法与TSP问题
蚁群算法与TSP问题
蚁群算法与TSP问题
k 表示第k只蚂蚁在本次循环中留在路径(i,j)上的 ij
信息素的浓度, ij 表示本次循环所有蚂蚁在路径ij上所释放
五:蚁群算法与TSP问题
TSP问题的人工蚁群算法中,假设m只蚂蚁在图的相 邻节点间移动,从而协作异步地得到问题的解。每只蚂 蚁的一步转移概率由图中的每条边上的两类参数决定: 1 信息素值 也称信息素痕迹。2 可见度,即先验值。
信息素的更新方式有2种,一是挥发,也就是所有 路径上的信息素以一定的比率进行减少,模拟自然蚁群 的信息素随时间挥发的过程;二是增强,给评价值 “好”(有蚂蚁走过)的边增加信息素。
0
(3)
(
ij
蚁群算法的基本原理

蚁群算法的基本原理蚁群算法 (Ant Colony Optimization, ACO) 是一种基于群体智能的优化算法,模拟了蚂蚁在寻找食物时候的行为,被广泛应用于求解组合优化问题、路径规划等领域。
蚁群算法的基本思路蚁群算法的基本思路是通过模拟蚂蚁在寻找食物的过程中释放信息素来获取全局最优解。
具体过程如下:1.初始化信息素: 首先,需要在所有可行解的路径上放置一些信息素。
在开始时,信息素值可以选择为等量的值或一些默认值。
2.蚁群搜索: 一开始,所有的蚂蚁都分别随机选择一个节点作为起点,并开始在网络中搜索。
蚂蚁行动的过程中,会根据路径上信息素浓度的大小来选择下一步的方向。
同时,每只蚂蚁都会记录其所经过的路径和信息素值。
3.信息素更新: 每只蚂蚁到达终点之后,计算其所经过路径的费用,然后根据一定的规则更新路径上的信息素。
较优的路径上将会添加更多的信息素,使下一次蚂蚁选择该路径的概率更大。
4.重复搜索: 重复上面的步骤,直到满足一个停止条件为止。
一种常见的停止条件是达到预定的迭代次数。
蚁群算法的优势蚁群算法在解决组合优化问题时,具有以下的优势:1.全局优化能力极强: 因为每只蚂蚁都只关注自己所经过的路径上的信息素值,所以可以同时搜索并更新多个路径,从而有可能找到全局最优解。
2.能够避免陷入局部最优: 蚁群算法可以通过信息素的挥发、说长存、信息素值的启发式更新等手段来避免陷入局部最优解。
3.易于扩展和并行化: 蚁群算法通常是一种并行的算法,可以很轻松地应用于分布式计算环境中。
蚁群算法的应用蚁群算法在解决组合优化问题、路径规划、调度等方面有着广泛的应用,如下所示:1.旅行商问题: 蚁群算法可以用于解决旅行商问题。
2.线性规划问题: 蚁群算法可以用于求解线性规划问题。
3.路径规划问题: 蚁群算法可以用于车辆路径规划问题。
4.调度问题: 蚁群算法可以用于作业车间调度问题。
蚁群算法是一种基于群体智能的优化算法,模拟了蚂蚁在寻找食物时候的行为。
蚁群算法 加约束条件

蚁群算法加约束条件【原创实用版】目录1.蚁群算法概述2.蚁群算法的约束条件3.蚁群算法的应用实例4.蚁群算法的优缺点正文一、蚁群算法概述蚁群算法(Ant Colony Optimization, ACO)是一种模拟自然界蚂蚁觅食行为的优化算法。
该算法由意大利学者 Dorigo、Gambardella 等人于 1991 年提出,是一种基于种群的随机搜索算法。
蚁群算法借鉴了蚂蚁觅食过程中的信息素更新机制,通过模拟蚂蚁在寻找食物过程中的信息共享和协同搜索策略,从而在解决优化问题上表现出较强的全局搜索能力。
二、蚁群算法的约束条件在蚁群算法中,约束条件通常包括以下两个方面:1.信息素浓度约束:蚁群算法中,信息素的浓度受限于信息素的挥发性和蚂蚁在路径上释放的信息素的数量。
当信息素的浓度超过一定阈值时,算法会采取相应的措施,如降低信息素的浓度或者增加信息素的挥发性。
2.蚂蚁数量约束:蚁群算法中,蚂蚁的数量是固定的。
在算法执行过程中,蚂蚁的数量不会增加或减少。
因此,在解决实际问题时,需要根据问题的规模和复杂度,合理地选择蚂蚁的数量。
三、蚁群算法的应用实例蚁群算法在许多领域都取得了显著的应用成果,例如:1.旅行商问题(Traveling Salesman Problem, TSP):TSP 是蚁群算法的经典应用之一,通过模拟蚂蚁在城市间寻找最短路径的过程,求解TSP 问题。
2.装载问题(Loading Problem):装载问题是指在有限的车辆空间内,合理地安排货物的装载方案,以使运输成本最小化。
蚁群算法在解决装载问题时,表现出了较好的全局搜索能力。
3.蚁群算法在工程设计、生产调度、供应链管理等领域也取得了较好的应用效果。
四、蚁群算法的优缺点蚁群算法作为一种优化算法,具有以下优缺点:优点:1.全局搜索能力较强:蚁群算法在求解优化问题时,具有较强的全局搜索能力,能够较快地找到较优解。
2.适应性强:蚁群算法可以根据问题的特点和规模,灵活地调整算法参数,如信息素浓度、挥发性等,以提高算法的性能。
蚁群算法简介2

蚁群算法(ant colony optimization, ACO),又称蚂蚁算法,是一种用来在图中寻找优化路径的机率型技术。
它由Marco Dorigo于1992年在他的博士论文中引入,其灵感来源于蚂蚁在寻找食物过程中发现路径的行为。
为什么小小的蚂蚁能够找到食物?他们具有智能么?设想,如果我们要为蚂蚁设计一个人工智能的程序,那么这个程序要多么复杂呢?首先,你要让蚂蚁能够避开障碍物,就必须根据适当的地形给它编进指令让他们能够巧妙的避开障碍物,其次,要让蚂蚁找到食物,就需要让他们遍历空间上的所有点;再次,如果要让蚂蚁找到最短的路径,那么需要计算所有可能的路径并且比较它们的大小,而且更重要的是,你要小心翼翼的编程,因为程序的错误也许会让你前功尽弃。
这是多么不可思议的程序!太复杂了,恐怕没人能够完成这样繁琐冗余的程序。
然而,事实并没有你想得那么复杂,上面这个程序每个蚂蚁的核心程序编码不过100多行!为什么这么简单的程序会让蚂蚁干这样复杂的事情?答案是:简单规则的涌现。
事实上,每只蚂蚁并不是像我们想象的需要知道整个世界的信息,他们其实只关心很小范围内的眼前信息,而且根据这些局部信息利用几条简单的规则进行决策,这样,在蚁群这个集体里,复杂性的行为就会凸现出来。
这就是人工生命、复杂性科学解释的规律!那么,这些简单规则是什么呢?下面详细说明:1、范围:蚂蚁观察到的范围是一个方格世界,蚂蚁有一个参数为速度半径(一般是3),那么它能观察到的范围就是3*3个方格世界,并且能移动的距离也在这个范围之内。
2、环境:蚂蚁所在的环境是一个虚拟的世界,其中有障碍物,有别的蚂蚁,还有信息素,信息素有两种,一种是找到食物的蚂蚁洒下的食物信息素,一种是找到窝的蚂蚁洒下的窝的信息素。
每个蚂蚁都仅仅能感知它范围内的环境信息。
环境以一定的速率让信息素消失。
3、觅食规则:在每只蚂蚁能感知的范围内寻找是否有食物,如果有就直接过去。
否则看是否有信息素,并且比较在能感知的范围内哪一点的信息素最多,这样,它就朝信息素多的地方走,并且每只蚂蚁多会以小概率犯错误,从而并不是往信息素最多的点移动。
人工蜂群算法和蚁群算法

人工蜂群算法和蚁群算法人工蜂群算法(Artificial Bee Colony Algorithm,简称ABC 算法)和蚁群算法(Ant Colony Algorithm,简称ACA)都是基于自然界中生物行为的启发式搜索算法。
它们在解决优化问题方面具有较强的通用性,被广泛应用于工程、自然科学和社会科学等多个领域。
一、人工蜂群算法(ABC算法)人工蜂群算法是由土耳其学者Karaboga于2005年首次提出,灵感来源于蜜蜂寻找花蜜的过程。
该算法通过模拟蜜蜂的搜索行为来寻找最优解。
算法步骤:1. 初始化一群蜜蜂,每个蜜蜂代表一个潜在的解决方案。
2. 蜜蜂根据蜂王释放的信息素和自己的飞行经验,选择下一个搜索位置。
3. 评估每个位置的花蜜量(即解的质量)。
4. 根据花蜜量和蜜罐位置更新信息素。
5. 经过多次迭代,直至满足终止条件,如达到最大迭代次数或找到满足要求的解。
二、蚁群算法(ACA)蚁群算法是由意大利学者Dorigo、Maniezzo和Colorni于1992年提出的,灵感来源于蚂蚁在寻找食物过程中释放信息素并利用这种信息素找到最优路径的行为。
算法步骤:1. 初始化一群蚂蚁,每个蚂蚁随机选择一个节点开始搜索。
2. 蚂蚁在选择下一个节点时,会根据当前节点的信息素浓度和启发函数(如距离的倒数)来计算转移概率。
3. 每只蚂蚁遍历整个问题空间,留下路径上的信息素。
4. 信息素随时间蒸发,蚂蚁的路径越短,信息素蒸发得越慢。
5. 经过多次迭代,直至满足终止条件,如达到最大迭代次数或找到满足要求的解。
三、比较原理不同:ABC算法基于蜜蜂的搜索行为,而ACA基于蚂蚁的信息素觅食行为。
应用领域:ABC算法适用于连续优化问题,而ACA在组合优化问题中应用更为广泛。
参数调整:ABC算法的参数较少,调整相对容易;ACA的参数较多,调整和优化难度较大。
局部搜索能力:ABC算法具有较强的局部搜索能力;ACA通过信息素的蒸发和更新,能够避免早熟收敛。
蚁群算法蚂蚁算法中英文对照外文翻译文献
蚁群算法外文文献翻译(含:英文原文及中文译文)英文原文The ant colony optimizationOriginAnt colony algorithm (ant colony optimization, ACO), also known as ant algorithm is a probability -based algorithm is used to find the optimal path in the graph . It in his doctoral thesis proposed by Marco Dorigo in 1992 , inspired by the behavior of the path of the ants found in the process of looking for food . Ant colony algorithm is a simulated evolutionary algorithm , preliminary studies show that the algorithm has many excellent properties. Optimization design for PID controller parameters , the results of the results of the ant colony algorithm design and genetic algorithm are compared , the numerical simulation the results show that ant colony algorithm is a new kind of simulated evolutionary optimization effectiveness and value.principleEach ant began to search for food without first telling them where the food was. When a food is found, it will release a pheromone to the environment, attracting other ants, so that more and more ants will find food! Some ants do not always repeat the same path as other ants. Theywill In a different way, if the road to development is shorter than the other roads, then gradually more ants are attracted to this shorter road. Finally, after a period of time, it may appear that the shortest path is repeated by most ants.Why are small ants able to find food? Are they intelligent? Let's imagine if we want to design an AI program for ants, how complex is this program? First, if you want ants to be able to avoid obstacles, you must According to the appropriate terrain, it is programmed to allow them to avoid obstacles, and secondly, to allow ants to find food, they need to be traversed by all points in space; again, if the ant is to find the shortest path, then Y ou need to calculate all possible paths and compare their sizes, and more importantly, you must be careful programming, because the mistakes of the program may make you work harder. This is an incredible process! Too complicated, I am afraid no one can complete such a cumbersome and redundant program.However, the facts are not as complicated as you think. The above program has only 100 lines of code for each ant's core program! Why is such a simple program to make ants do such complicated things? The answer is: the emergence of simple rules. In fact, each ant does not need to know the information of the whole world as we imagine. They actually only care about the immediate information in a very small range, and use these simple rules to make decisions based on these local information. Inthe collective, complex behaviors will emerge. This is the law of the interpretation of artificial life and complexity science! So what are these simple rules?1 ScopeThe range observed by ants is a checkered world. An ant has a parameter that is a speed radius (typically 3). The range it can observe is a 3*3 checkered world, and the distance that can be moved is also in this range. Inside.2, the environmentThe ant's environment is a virtual world. There are obstacles, other ants, and pheromones. There are two kinds of pheromones. One is the food pheromone that is found by the ants who find food. One is to find the nest. The ants sprinkled the pheromone of the nest. Each ant can only sense the environmental information within its range. The environment makes the pheromone disappear at a certain rate.3, foraging rulesFind out if there is food in the range that each ant can sense, and if so, go straight. Otherwise, if there are pheromones and if there are more pheromones in the perceivable range, then it will go to places with a large number of pheromones, and each ant will make mistakes with a small probability, and not go to the information. Most points move. The rules for the ant to find the nest are the same as above, except that it respondsto the pheromone of the nest and does not respond to the food pheromone.4, move rulesEach ant moves in the direction of the most pheromone, and, when there is no pheromone guidance around it, the ant will continue to move in the direction of its original movement, and there will be a random, small disturbance in the direction of movement. In order to prevent the ant from turning in circles, it will remember which points it has recently passed. If it is found that the next point to be taken has recently passed, it will try to avoid it.5, obstacle avoidance rules:If the ant is moving in the direction of obstacles, it will randomly choose another direction, and if there are pheromone guidelines, it will follow the rules of foraging.6, broadcast pheromone rules:Each ant spreads the most pheromones when he first finds food or nests. As he goes further, the number of pheromones sown is decreasing.According to these rules, there is no direct relationship between ants, but each ant interacts with the environment, and through the pheromone ties, the ants are actually associated with each other. For example, when an ant finds food, it does not directly tell other ants that there is food. Instead, it broadcasts pheromones to the environment. When other antspass near it, they will feel the existence of pheromone, and according to The pheromone guide found the food.problem:Having said so much, how did an ant find food? When no ants find food, there is no useful pheromone in the environment. Why do ants find food relatively efficiently? This is due to the ants' movement rules, especially It is a movement rule when there is no pheromone. First of all, it must be able to maintain a certain inertia as much as possible so that the ant moves forward as far as possible (starting, this front is a randomly fixed direction), rather than spinning or shaking in situ; second, the ants must have some randomness. Although there is a fixed direction, it cannot move in a straight line like a particle, but it has a random disturbance. This makes the ant move with a certain purpose, try to keep the original direction, but there are new temptations, especially when it comes to obstacles, it will immediately change direction, this can be seen as a selection process, also It is the environmental obstacles that make ants correct in one direction, but not in other directions. This explains why a single ant can still find a well-kept food in a complex map such as a maze. Of course, when an ant finds food, most ants will find food quickly along the pheromone. However, it is not ruled out that at the beginning, some ants randomly selected the same path. As more pheromones are released by the ants on this path, more ants also choose this path. However, thispath is not optimal (ie, shortest). Therefore, after the number of iterations is completed, the ant finds that it is not an optimal solution but a suboptimal solution. The result of this case may be of practical significance. Not much.How does the ant find the shortest path? This is due to the pheromone, and to the environment, specifically the computer clock. Where there are many places of information, it is obvious that there will be more ants here, so more ants will come together. If there are two roads leading from the nest to food, the number of ants that follow the two roads is the same (or there are more ants on the longer roads, which does not matter). When the ant arrives at the end point along a road, he will return immediately, so that short ant roads will be shorter and shorter, which means that the frequency of repetition will be faster, and therefore there will be more ants walking through the unit time. The number of pheromones will naturally drop. Naturally there will be more ants being attracted to it, so that more pheromones will be sprayed. The long road is the opposite. Therefore, more and more ants are gathering to The shortest path was found and the shortest path was found. Some people may ask the question of the shortest path locally and the shortest part of the overall situation. In fact, the ants gradually approach the shortest path of the whole world. Why? It is because ants make mistakes, that is, they will not go to places with high pheromone according to a certain probability.Going for another way, this can be understood as an innovation. If this innovation can shorten the road, then according to the principle just described, more ants will be attracted.ExtendedWhat do you find after following the trail of ants? Through the above principle of narrative and practical operation, it is not difficult to find that ants have intelligent behavior, due entirely to its simple rules of conduct, and these rules are integrated into the following two aspects. Features:1, diversity2, positive feedbackThe diversity ensures that the ants do not walk into the dead-end and loop indefinitely while feeding, and the positive feedback mechanism ensures that relatively good information can be preserved. We can think of diversity as a creative ability, and positive feedback as a learning reinforcement. The power of positive feedback can also be compared to the authoritative opinion, and diversity is the creativeness of breaking the authority. It is precisely these two carefully combined cleverness that has led to the emergence of smart behavior.In terms of extension, the evolution of nature, the progress of society, and the innovation of mankind are all inseparable from these two things. The diversity guarantees the system's ability to innovate, and positivefeedback ensures that good features can be strengthened, and both must be just right. Combine. If there is excess diversity, that is, if the system is too active, this is equivalent to excessive random movement of ants, and it will be trapped in chaos. On the contrary, if diversity is not enough and positive feedback mechanism is too strong, then the system will be like a pool of stagnant water. In terms of ant colonies, this is manifested in the fact that the behavior of ants is too rigid. When the environment changes, ant colonies still cannot adjust properly. Since complexity and intelligence behaviors emerge according to the underlying rules, since the underlying rules have diversity and positive feedback characteristics, then perhaps you would ask where these rules come from? Where does diversity and positive feedback come from? My own opinion: Rules come from the evolution of nature. The evolution of nature is based on the clever combination of diversity and positive feedback. And why is this clever combination? Why is the world presented before your eyes so lifelike? The answer is that the environment has created all of this. The reason why you see a vivid world is because those who cannot adapt to the diversity of the environment and The combination of positive feedback has been dead and eliminated by the environment!Ant Colony Algorithm Features1) Ant Colony Algorithm is a self-organizing algorithm. In system theory, self-organization and its organization are two basic categories oforganizations. The difference is whether organizational or organizational instructions come from within or outside the system. From the inside of the system, they are self-organizing. Outside the system is his organization. If the system has no specific external intervention during the process of obtaining space, time, or functional structure, we say that the system is self-organizing. In an abstract sense, self-organization is the process of making the system increase without external action (that is, the system changes from disorder to order). The ant colony algorithm satisfactorily satisfies this process. The ant colony optimization is used as an example. At the beginning of the algorithm, a single artificial ant finds the solution disorderly. After a period of evolution of the algorithm, artificial ants increasingly tend to find a near optimal solution through the role of the information hormone. This is a no Orderly process.2) The ant colony algorithm is an essentially parallel algorithm. Each ant searches independently of each other and only communicates through the information hormone. So ant colony algorithm can be regarded as a distributed multi-agent system. It begins independent search at multiple points in the problem space, which not only increases the reliability of the algorithm, but also makes the algorithm have a strong global search capability. .3) The ant colony algorithm is a positive feedback algorithm. From the process of foraging of real ants, it is not difficult to see that ants canultimately find the shortest path and rely directly on the accumulation of information hormones on the shortest path. However, the accumulation of information hormones is a positive feedback process. For the ant colony algorithm, there is exactly the same information hormone in the environment at the initial moment, giving a slight disturbance to the system, making the trajectory concentration on each side not the same, and the solution constructed by ants has advantages and disadvantages. The feedback method used by the algorithm It is to leave more information hormones in the path of better solutions, and more information hormones attract more ants. The process of positive feedback makes the initial differences continue to expand, while guiding the entire system. Evolution toward the optimal solution. Therefore, positive feedback is an important feature of the ant algorithm, which enables the algorithm evolution process to proceed.(4) Ant colony algorithm has strong robustness. Compared with other algorithms, the ant colony algorithm does not require a high initial route. That is, the result of the ant colony algorithm does not depend on the selection of the sub-original route, and no manual adjustment is required during the search. Secondly, the number of parameters of the ant colony algorithm is small, the setting is simple, and the ant colony algorithm is easy to apply to other combinatorial optimization problems.The ant colony optimization algorithm was originally used to solvethe TSP problem. After years of development, it has penetrated into other fields, such as graph coloring, large-scale integrated circuit design, routing problems in communication networks, load balancing, and vehicle scheduling. Wait. The ant colony algorithm has been successfully applied in several fields, and the most successful one is in the application of combinatorial optimization.In the process of network routing, the traffic distribution of the network constantly changes, and the network links or nodes randomly fail or rejoin. The ant colony's self-catalysis and forward feedback mechanism exactly match the solution characteristics of this type of problem. Therefore, the ant colony algorithm has been applied in the network field. The parallel and distributed nature of ant colony foraging behavior makes the algorithm particularly suitable for parallel processing. Therefore, implementing parallel execution of the algorithm has great potential for solving a large number of complex practical application problems.If there is a large number of individuals without intelligence in a group, the intelligent behavior they exhibit through simple cooperation between them is called Swarm Intelligence. Communication on the Internet is nothing more than the result of the interaction of neurons (human brains) through the Internet. Optical cables and routers are merely extensions of axons and synapses. From the perspective ofself-organization phenomenon, there is no essential difference between the intelligence of the human brain and the ant colony. A single neuron has no intelligence and no single ant, but the system formed by connection is an agent.中文译文蚁群算法起源蚁群算法(ant colony optimization, ACO),又称蚂蚁算法,是一种用来在图中寻找优化路径的机率型算法。
蚁群算法概念
蚁群算法概念
蚁群算法(Ant Colony Algorithm,ACA)是一种模拟蚁群觅食行为的启发式优化算法,被广泛应用于求解组合优化问题。
其基本思想是通过多个“蚂蚁”在问题的解空间中搜索最优解,并通过互相交流信息来引导搜索过程。
蚂蚁在搜索过程中通过携带的信息素标记路径,信息素浓度表示路径的好坏程度。
路径上的信息素浓度增加与蚂蚁对路径的评价正相关,蚂蚁根据信息素浓度的大小选择下一步的移动方向。
同时,信息素会随着时间的推移逐渐挥发,从而模拟蚁群搜索过程中信息的传递与更新。
蚁群算法的主要步骤包括初始化信息素、蚂蚁的移动、更新信息素以及重复执行这些步骤。
通过多次迭代,蚁群算法能够逐步搜索到问题的最优解。
蚁群算法具有全局优化能力和强鲁棒性,在解决复杂优化问题和组合优化问题方面具有较高的效果和应用价值。
它在路线规划、物流配送、旅行商问题等领域都有广泛的应用。
蚁群算法简介
1. 蚁群算法简介蚁群算法(Ant Clony Optimization,ACO)是一种群智能算法,它是由一群无智能或有轻微智能的个体(Agent)通过相互协作而表现出智能行为,从而为求解复杂问题提供了一个新的可能性。
蚁群算法最早是由意大利学者Colorni A., Dorigo M. 等于1991年提出。
经过20多年的发展,蚁群算法在理论以及应用研究上已经得到巨大的进步。
蚁群算法是一种仿生学算法,是由自然界中蚂蚁觅食的行为而启发的。
在自然界中,蚂蚁觅食过程中,蚁群总能够按照寻找到一条从蚁巢和食物源的最优路径。
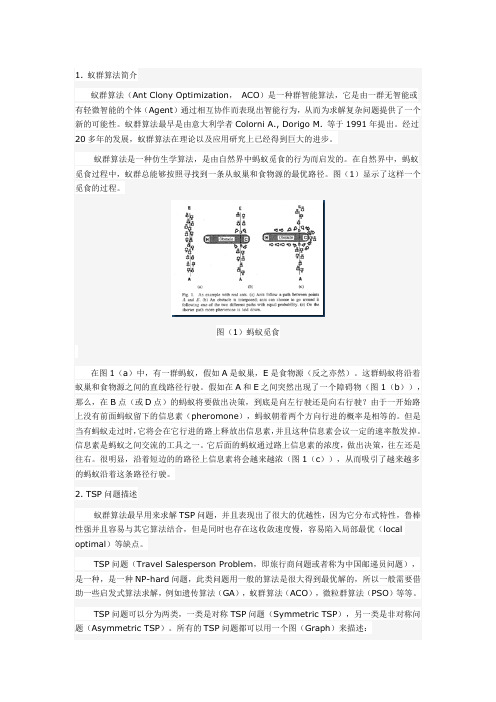
图(1)显示了这样一个觅食的过程。
图(1)蚂蚁觅食在图1(a)中,有一群蚂蚁,假如A是蚁巢,E是食物源(反之亦然)。
这群蚂蚁将沿着蚁巢和食物源之间的直线路径行驶。
假如在A和E之间突然出现了一个障碍物(图1(b)),那么,在B点(或D点)的蚂蚁将要做出决策,到底是向左行驶还是向右行驶?由于一开始路上没有前面蚂蚁留下的信息素(pheromone),蚂蚁朝着两个方向行进的概率是相等的。
但是当有蚂蚁走过时,它将会在它行进的路上释放出信息素,并且这种信息素会议一定的速率散发掉。
信息素是蚂蚁之间交流的工具之一。
它后面的蚂蚁通过路上信息素的浓度,做出决策,往左还是往右。
很明显,沿着短边的的路径上信息素将会越来越浓(图1(c)),从而吸引了越来越多的蚂蚁沿着这条路径行驶。
2. TSP问题描述蚁群算法最早用来求解TSP问题,并且表现出了很大的优越性,因为它分布式特性,鲁棒性强并且容易与其它算法结合,但是同时也存在这收敛速度慢,容易陷入局部最优(local optimal)等缺点。
TSP问题(Travel Salesperson Problem,即旅行商问题或者称为中国邮递员问题),是一种,是一种NP-hard问题,此类问题用一般的算法是很大得到最优解的,所以一般需要借助一些启发式算法求解,例如遗传算法(GA),蚁群算法(ACO),微粒群算法(PSO)等等。
蚁群算法

蚁群算法Ant Colony Algorithms真实世界的蚂蚁行为真实世界的蚂蚁行为即使两条路径一样长,蚂蚁也会强化对其中一条的选择(收敛性)蚁群算法(Ant Algorithms)蚂蚁几乎是没有视力的,它们是如何找到食物和家之间的路径的?在觅食过程中,蚂蚁在它所经过的路径上留下浓度与食物源质量成比例的信息素(pheromone) ,并能够感知信息素的存在及其浓度,以此指导自己的运动方向,倾向于朝着信息素浓度高的方向移动.蚁群算法(Ant Algorithms)于是,蚁群的集体行为便表现出一种信息正反馈现象:某一路径上走过的蚂蚁越多,则后来者选择该路径的概率就越大,因此质量好、距离近的食物源会吸引越来越多的蚂蚁,信息素浓度的增长速度会更快. 蚂蚁个体之间就是通过这种信息的交流达到寻找食物和蚁穴之间最短路径的目的蚁群算法(d=1d=1A蚁群算法(Ant Algorithms)我们感兴趣的是对解空间的探索,而非简单的数路径; 应允许蚂蚁们以概率的方式选择路径以及确定最佳路径,概率与信息素的浓度成比例。
不希望蚂蚁们简单地根据最高浓度来选择路径,如果这样的话,搜索会迅速地陷入局部最优。
一个蚂蚁选择一个确定路径的概率,不仅取决于信息素地浓度,同时也取决于该蚂蚁所看到的信息。
信息素的痕迹不能无限增加,因此,需要引入“挥发”机制。
蚁群算法(Ant Algorithms)由此获得灵感而设计出的算法称蚁群算法ant algorithms(或蚁群系统ant systems)蚁群算法(系统)是一种基于群体策略的搜索方法。
有一群蚂蚁,每个蚂蚁找到一个解,然后通过某种方式(信息素)与其它蚂蚁通信。
以加速群体向最优解的收敛。
利用条件概率p ij描述前一状态i与后一状态j之间的转移概率。
属于bivariate model。
蚁群算法(Ant Algorithms)蚁群算法可以用于解决许多组合优化问题,只要能做到用一个图表来阐述将要解决的问题,能定义一种正反馈过程(如TSP 问题中的残留信息) ,问题结构本身能提供解题用的启发式信息(如TSP 问题中城市间的距离) ,约束机制的建立(如TSP 问题中已访问城市的列表) 。
蚁群算法及其在移动机器人路径规划中的应用剖析

蚁群算法及其在移动机器人路径规划中的应用剖析蚁群算法(Ant Colony algorithm)是一种模拟蚂蚁行为的启发式优化算法,其主要应用于解决组合优化问题,特别是在路径规划问题中的应用较为突出。
蚁群算法的基本原理是基于蚂蚁在寻找食物时的行为规律,当一只蚂蚁找到食物后,会释放一种称为信息素的物质,同时返回巢穴。
其他蚂蚁会根据信息素的浓度来选择路径,浓度高的路径被选择的概率较大。
当蚂蚁返回巢穴时,会根据所选择路径上的信息素浓度来增加信息素的浓度,从而在路径上留下更多的信息素。
随着时间的推移,信息素浓度逐渐增加,最终蚂蚁群体会逐渐聚集在较优的路径上。
移动机器人路径规划是指根据机器人的起点和终点,找到一条最优的路径。
在移动机器人路径规划中,蚁群算法可以解决多目标、多约束的路径规划问题。
下面将从问题建模、蚁群算法实现、实际应用等方面对蚁群算法在移动机器人路径规划中的应用进行剖析。
首先,对问题进行建模。
在移动机器人路径规划中,路径可以表示为有向图,图的节点表示机器人可以到达的位置,边表示连接两个位置的路径。
节点之间的距离可以是直线距离、时间、能耗等。
起始节点表示机器人的起点,终止节点表示机器人的目标。
路径规划的目标是找到一条从起始节点到终止节点的最短路径,同时尽可能满足约束条件。
其次,实现蚁群算法。
蚁群算法包括初始化信息素、蚂蚁的移动、信息素更新等步骤。
初始化信息素是指在路径上的每条边上设置初始信息素的浓度。
蚂蚁的移动过程中,每只蚂蚁根据信息素浓度和启发式函数来选择下一步移动的节点。
启发式函数可以根据节点和目标节点的距离、路径上信息素的浓度等因素来计算。
当蚂蚁到达终点后,根据蚂蚁的路径长度来更新路径上的信息素浓度,即路径长度越短的蚂蚁路径上的信息素浓度越高。
同时,为了防止信息素过快蒸发,可以引入信息素的挥发系数。
蚂蚁算法一般通过多次迭代来寻找最优的路径。
最后,应用蚁群算法进行路径规划。
蚁群算法在移动机器人路径规划中可以实现多目标、多约束的优化。
毕业论文 蚁群算法
毕业论文蚁群算法蚁群算法(Ant Colony Optimization,ACO)是一种模拟蚂蚁寻找食物的行为而发展而来的一种计算智能算法。
该方法利用蚂蚁在寻找食物过程中留下的信息素来指导其他蚂蚁选择路径,从而达到最优路径的目的。
本文将介绍蚁群算法的基本原理、应用领域以及算法的优缺点。
一、算法原理1.1信息素在蚁群算法中,信息素是指蚂蚁在寻找食物时分泌的一种化学物质,它会留在路径上,用于指导其他蚂蚁选择路径。
当一条路径上的信息素浓度足够高时,其他蚂蚁会更倾向于选择这条路径。
1.2蚁群算法过程(1)初始化:随机放置一些蚂蚁并随机设置它们的起点和终点。
(2)蚂蚁选择路径:每个蚂蚁根据当前位置的信息素浓度,选择下一步要走的路径。
选择路径的规则可以根据具体问题来设计。
(3)信息素更新:当蚂蚁完成任务后,会在其经过的路径上留下一定量的信息素。
信息素的更新可以通过公式:$ T_{ij}=(1-ρ) ·T_{ij}+∑\\frac{\\Delta T_{ij}^{k}}{L_{k}} $ 来完成,其中 $ T_{ij} $ 表示在第 $i$ 个节点到第 $j$ 个节点之间路径的信息素,$ L_{k} $ 表示第 $k$ 只蚂蚁走过的路径长度,$ \\Delta T_{ij}^{k} $ 表示第 $k$ 只蚂蚁在第 $i$ 个节点到第$j$ 个节点之间路径上留下的信息素。
(4)重复执行步骤(2)和(3),直到满足算法终止条件。
二、应用领域由于蚁群算法具有寻优能力和适应性强等优点,因此在多个应用领域得到了广泛的应用:2.1路线规划将蚁群算法应用到路线规划中,可以帮助人们更快捷、更准确地规划出最优路径。
例如,在地图搜索、货车路径规划、船只导航等领域都有广泛的应用。
2.2优化问题蚁群算法能够在多种优化问题中得到应用,例如在图像处理、模式识别、网络优化中,通过不断地调节参数,可以找出最佳的结果。
2.3组合优化问题在组合优化问题中,由于问题的规模较大,常规优化算法很容易陷入局部最优解中无法跳出。
蚂蚁群算法
蚂蚁群算法摘要:1.蚂蚁群算法的定义与原理2.蚂蚁群算法的应用领域3.蚂蚁群算法的优缺点4.我国在蚂蚁群算法研究方面的进展正文:蚂蚁群算法(Ant Colony Optimization, ACO)是一种受自然界蚂蚁觅食行为启发而设计的优化算法。
该算法主要通过模拟蚂蚁在寻找食物过程中的信息素更新和路径选择过程,以达到对复杂问题的求解。
在蚂蚁群算法中,信息素是蚂蚁在寻找食物过程中留下的一种化学物质,用于传递食物源的位置和质量信息。
当蚂蚁找到食物后,它会在返回路径上释放一种正向信息素,表示该路径是有效的。
而当蚂蚁走错路时,它会释放一种负向信息素,表示该路径是无效的。
随后,其他蚂蚁在寻找食物时会根据信息素的浓度来选择路径,从而实现整个蚁群的优化寻优。
蚂蚁群算法具有很强的全局搜索能力,适用于解决各种组合优化问题,如旅行商问题(Traveling Salesman Problem, TSP)、装载问题、排课问题等。
目前,蚂蚁群算法已经在多个领域取得了显著的应用成果,如物流、制造、交通、教育等。
尽管蚂蚁群算法在搜索优化问题方面具有很多优点,但同时也存在一些缺点,如算法收敛速度较慢、容易陷入局部最优解等。
为了克服这些问题,研究者们不断对算法进行改进和优化,如引入邻域搜索、自适应调整信息素浓度等策略,以提高算法的性能和效率。
我国在蚂蚁群算法研究方面取得了世界领先的成果。
研究人员不仅在理论层面深入探讨了蚂蚁群算法的原理和性能分析,还在实际应用中不断优化算法,使其更好地解决实际问题。
此外,我国还积极推动蚂蚁群算法与其他优化算法的融合研究,以期进一步拓展该算法的应用领域和实用性。
总之,蚂蚁群算法作为一种自然启发式优化算法,在解决复杂问题方面具有很大的潜力。
蚁群算法

Leabharlann 3、蚁群觅食过程
意大利学者M. Dorigo是最早发现蚂蚁的觅食习性的,蚂蚁总能找 到巢穴与食物源之间的最短路径。 蚂蚁在寻找食物源后,会在其经过的路径上释放一种信息素,并 能够感知其他蚂蚁释放的信息素。当某些路径上走过的蚂蚁越来 越多时,留下的信息素也会越来越多,以致后蚂蚁选择该路径的 概率也越来越高,从而更增加了该路径的吸引强度,逐渐形成了 一条它们自己事先并未意识到的最短路线。 蚂蚁会以较大的概率优先选择信息素浓度较高的路径,并释放一 定量的信息素,以增强该条路径的信息素的浓度,形成一个正反 馈。 路径上的信息浓度会随时间的推进,而不断挥发,从而不断降低, 这似乎也是变异
2、蚁群社会
在昆虫世界中,蚂蚁的组成是一种群居的大家庭,称为蚁群。蚁群 具有高度组织的社会性,彼此间的沟通不仅可以借助触觉的的联系, 在大规模的协调行动上,借助外激素之类的生化信息介质。 其中每个工蚁具有如下的职能: 平时在巢穴附近作无规则行走; 一旦发现食物,如果独自能搬的就往回搬,否则就回巢穴搬兵; 一路上它会留下外激至少的嗅迹,其强度与食物的品质和数量成正 比; 其他工蚁遇到嗅迹,就会循迹前进,也会有一定的走失率(选择其他 路径),走失率与嗅迹的强度成反比。 蚁群的行为表现出一种信息正反馈的现象; 某一路径上走过的蚂蚁越多,则后来选择该路径的概率就大,蚂蚁 个体间就是通过这种信息的交流达到搜索食物的目的
旅行商问题
旅行商问题”常被称为“旅行推销员问 题”,是指一名推销员要拜访多个地点时, 如何找到在拜访每个地点一次后再回到起 点的最短路径
蚁群算法
------20100840104
陈志强
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
本科毕业设计(论文) 外文翻译(附外文原文)学院:信息科学与工程学院课题名称:蚁群优化算法研究专业(方向):网络工程班级:网络工程10-1班学生:梁绍仲指导教师:董明刚日期: 2014年4月6日蚁群算法外文翻译中文:起源蚁群算法(ant colony optimization, ACO),又称蚂蚁算法,是一种用来在图中寻找优化路径的机率型算法。
它由Marco Dorigo于1992年在他的博士论文中提出,其灵感来源于蚂蚁在寻找食物过程中发现路径的行为。
蚁群算法是一种模拟进化算法,初步的研究表明该算法具有许多优良的性质.针对PID控制器参数优化设计问题,将蚁群算法设计的结果与遗传算法设计的结果进行了比较,数值仿真结果表明,蚁群算法具有一种新的模拟进化优化方法的有效性和应用价值。
原理各个蚂蚁在没有事先告诉他们食物在什么地方的前提下开始寻找食物。
当一只找到食物以后,它会向环境释放一种信息素,吸引其他的蚂蚁过来,这样越来越多的蚂蚁会找到食物!有些蚂蚁并没有象其它蚂蚁一样总重复同样的路,他们会另辟蹊径,如果令开辟的道路比原来的其他道路更短,那么,渐渐地更多的蚂蚁被吸引到这条较短的路上来。
最后,经过一段时间运行,可能会出现一条最短的路径被大多数蚂蚁重复着。
为什么小小的蚂蚁能够找到食物?他们具有智能么?设想,如果我们要为蚂蚁设计一个人工智能的程序,那么这个程序要多么复杂呢?首先,你要让蚂蚁能够避开障碍物,就必须根据适当的地形给它编进指令让他们能够巧妙的避开障碍物,其次,要让蚂蚁找到食物,就需要让他们遍历空间上的所有点;再次,如果要让蚂蚁找到最短的路径,那么需要计算所有可能的路径并且比较它们的大小,而且更重要的是,你要小心翼翼的编程,因为程序的错误也许会让你前功尽弃。
这是多么不可思议的程序!太复杂了,恐怕没人能够完成这样繁琐冗余的程序。
然而,事实并没有你想得那么复杂,上面这个程序每个蚂蚁的核心程序编码不过100多行!为什么这么简单的程序会让蚂蚁干这样复杂的事情?答案是:简单规则的涌现。
事实上,每只蚂蚁并不是像我们想象的需要知道整个世界的信息,他们其实只关心很小范围内的眼前信息,而且根据这些局部信息利用几条简单的规则进行决策,这样在蚁群这个集体里,复杂性的行为就会凸现出来。
这就是人工生命、复杂性科学解释的规律!那么,这些简单规则是什么呢?1、范围:蚂蚁观察到的范围是一个方格世界,蚂蚁有一个参数为速度半径(一般是3),那么它能观察到的范围就是3*3个方格世界,并且能移动的距离也在这个范围之内。
2、环境:蚂蚁所在的环境是一个虚拟的世界,其中有障碍物,有别的蚂蚁,还有信息素,信息素有两种,一种是找到食物的蚂蚁洒下的食物信息素,一种是找到窝的蚂蚁洒下的窝的信息素。
每个蚂蚁都仅仅能感知它范围内的环境信息。
环境以一定的速率让信息素消失。
3、觅食规则:在每只蚂蚁能感知的范围内寻找是否有食物,如果有就直接过去。
否则看是否有信息素,并且比较在能感知的范围内哪一点的信息素最多,这样,它就朝信息素多的地方走,并且每只蚂蚁都会以小概率犯错误,从而并不是往信息素最多的点移动。
蚂蚁找窝的规则和上面一样,只不过它对窝的信息素做出反应,而对食物信息素没反应。
4、移动规则:每只蚂蚁都朝向信息素最多的方向移,并且,当周围没有信息素指引的时候,蚂蚁会按照自己原来运动的方向惯性的运动下去,并且,在运动的方向有一个随机的小的扰动。
为了防止蚂蚁原地转圈,它会记住最近刚走过了哪些点,如果发现要走的下一点已经在最近走过了,它就会尽量避开。
5、避障规则:如果蚂蚁要移动的方向有障碍物挡住,它会随机的选择另一个方向,并且有信息素指引的话,它会按照觅食的规则行为。
6、播撒信息素规则:每只蚂蚁在刚找到食物或者窝的时候撒发的信息素最多,并随着它走远的距离,播撒的信息素越来越少。
根据这几条规则,蚂蚁之间并没有直接的关系,但是每只蚂蚁都和环境发生交互,而通过信息素这个纽带,实际上把各个蚂蚁之间关联起来了。
比如,当一只蚂蚁找到了食物,它并没有直接告诉其它蚂蚁这儿有食物,而是向环境播撒信息素,当其它的蚂蚁经过它附近的时候,就会感觉到信息素的存在,进而根据信息素的指引找到了食物。
问题:说了这么多,蚂蚁究竟是怎么找到食物的呢?在没有蚂蚁找到食物的时候,环境没有有用的信息素,那么蚂蚁为什么会相对有效的找到食物呢?这要归功于蚂蚁的移动规则,尤其是在没有信息素时候的移动规则。
首先,它要能尽量保持某种惯性,这样使得蚂蚁尽量向前方移动(开始,这个前方是随机固定的一个方向),而不是原地无谓的打转或者震动;其次,蚂蚁要有一定的随机性,虽然有了固定的方向,但它也不能像粒子一样直线运动下去,而是有一个随机的干扰。
这样就使得蚂蚁运动起来具有了一定的目的性,尽量保持原来的方向,但又有新的试探,尤其当碰到障碍物的时候它会立即改变方向,这可以看成一种选择的过程,也就是环境的障碍物让蚂蚁的某个方向正确,而其他方向则不对。
这就解释了为什么单个蚂蚁在复杂的诸如迷宫的地图中仍然能找到隐蔽得很好的食物。
当然,在有一只蚂蚁找到了食物的时候,大部分蚂蚁会沿着信息素很快找到食物的。
但不排除会出现这样的情况:在最初的时候,一部分蚂蚁通过随机选择了同一条路径,随着这条路径上蚂蚁释放的信息素越来越多,更多的蚂蚁也选择这条路径,但这条路径并不是最优(即最短)的,所以,导致了迭代次数完成后,蚂蚁找到的不是最优解,而是次优解,这种情况下的结果可能对实际应用的意义就不大了。
蚂蚁如何找到最短路径的?这一是要归功于信息素,另外要归功于环境,具体说是计算机时钟。
信息素多的地方显然经过这里的蚂蚁会多,因而会有更多的蚂蚁聚集过来。
假设有两条路从窝通向食物,开始的时候,走这两条路的蚂蚁数量同样多(或者较长的路上蚂蚁多,这也无关紧要)。
当蚂蚁沿着一条路到达终点以后会马上返回来,这样,短的路蚂蚁来回一次的时间就短,这也意味着重复的频率就快,因而在单位时间里走过的蚂蚁数目就多,洒下的信息素自然也会多,自然会有更多的蚂蚁被吸引过来,从而洒下更多的信息素……;而长的路正相反,因此,越来越多地蚂蚁聚集到较短的路径上来,最短的路径就近似找到了。
也许有人会问局部最短路径和全局最短路的问题,实际上蚂蚁逐渐接近全局最短路的,为什么呢?这源于蚂蚁会犯错误,也就是它会按照一定的概率不往信息素高的地方走而另辟蹊径,这可以理解为一种创新,这种创新如果能缩短路途,那么根据刚才叙述的原理,更多的蚂蚁会被吸引过来。
引申跟着蚂蚁的踪迹,你找到了什么?通过上面的原理叙述和实际操作,我们不难发现蚂蚁之所以具有智能行为,完全归功于它的简单行为规则,而这些规则综合起来具有下面两个方面的特点:1、多样性2、正反馈多样性保证了蚂蚁在觅食的时候不置走进死胡同而无限循环,正反馈机制则保证了相对优良的信息能够被保存下来。
我们可以把多样性看成是一种创造能力,而正反馈是一种学习强化能力。
正反馈的力量也可以比喻成权威的意见,而多样性是打破权威体现的创造性,正是这两点小心翼翼的巧妙结合才使得智能行为涌现出来了。
引申来讲,大自然的进化,社会的进步、人类的创新实际上都离不开这两样东西,多样性保证了系统的创新能力,正反馈保证了优良特性能够得到强化,两者要恰到好处的结合。
如果多样性过剩,也就是系统过于活跃,这相当于蚂蚁会过多的随机运动,它就会陷入混沌状态;而相反,多样性不够,正反馈机制过强,那么系统就好比一潭死水。
这在蚁群中来讲就表现为,蚂蚁的行为过于僵硬,当环境变化了,蚂蚁群仍然不能适当的调整。
既然复杂性、智能行为是根据底层规则涌现的,既然底层规则具有多样性和正反馈特点,那么也许你会问这些规则是哪里来的?多样性和正反馈又是哪里来的?我本人的意见:规则来源于大自然的进化。
而大自然的进化根据刚才讲的也体现为多样性和正反馈的巧妙结合。
而这样的巧妙结合又是为什么呢?为什么在你眼前呈现的世界是如此栩栩如生呢?答案在于环境造就了这一切,之所以你看到栩栩如生的世界,是因为那些不能够适应环境的多样性与正反馈的结合都已经死掉了,被环境淘汰了!蚁群算法的特点1) 蚁群算法是一种自组织的算法。
在系统论中,自组织和它组织是组织的两个基本分类,其区别在于组织力或组织指令是来自于系统的内部还是来自于系统的外部,来自于系统内部的是自组织,来自于系统外部的是他组织。
如果系统在获得空间的、时间的或者功能结构的过程中,没有外界的特定干预,我们便说系统是自组织的。
在抽象意义上讲,自组织就是在没有外界作用下使得系统墒增加的过程(即是系统从无序到有序的变化过程)。
蚁群算法充分休现了这个过程,以蚂蚁群体优化为例子说明。
当算法开始的初期,单个的人工蚂蚁无序的寻找解,算法经过一段时间的演化,人工蚂蚁间通过信息激素的作用,自发的越来越趋向于寻找到接近最优解的一些解,这就是一个无序到有序的过程。
2) 蚁群算法是一种本质上并行的算法。
每只蚂蚁搜索的过程彼此独立,仅通过信息激素进行通信。
所以蚁群算法则可以看作是一个分布式的多agent系统,它在问题空间的多点同时开始进行独立的解搜索,不仅增加了算法的可靠性,也使得算法具有较强的全局搜索能力。
3) 蚁群算法是一种正反馈的算法。
从真实蚂蚁的觅食过程中我们不难看出,蚂蚁能够最终找到最短路径,直接依赖于最短路径上信息激素的堆积,而信息激素的堆积却是一个正反馈的过程。
对蚁群算法来说,初始时刻在环境中存在完全相同的信息激素,给予系统一个微小扰动,使得各个边上的轨迹浓度不相同,蚂蚁构造的解就存在了优劣,算法采用的反馈方式是在较优的解经过的路径留下更多的信息激素,而更多的信息激素又吸引了更多的蚂蚁,这个正反馈的过程使得初始的不同得到不断的扩大,同时又引导整个系统向最优解的方向进化。
因此,正反馈是蚂蚁算法的重要特征,它使得算法演化过程得以进行。
(4) 蚁群算法具有较强的鲁棒性。
相对于其它算法,蚁群算法对初始路线要求不高,即蚁群算法的求解结果不依赖子初始路线的选择,而且在搜索过程中不需要进行人工的调整。
其次,蚁群算法的参数数目少,设置简单,易于蚁群算法应用到其它组合优化问题的求解。
蚁群优化算法最初用于解决TSP问题,经过多年的发展,已经陆续渗透到其他领域中,如,图着色问题、大规模集成电路设计、通讯网络中的路由问题以及负载平衡问题、车辆调度问题等。
蚁群算法在若干领域己获得成功的应用,其中最成功的是在组合优化问题中的应用。
在网络路由处理中,网络的流量分布不断变化,网络链路或结点也会随机地失效或重新加入。
蚁群的自身催化与正向反馈机制正好符合了这类问题的求解特点,因而,蚁群算法在网络领域得到一定应用。
蚁群觅食行为所呈现出的并行与分布特性使得算法特别适合于并行化处理。
因而,实现算法的并行化执行对于大量复杂的实际应用问题的求解来说是极具潜力的。