嵌入式 中断系统编程
嵌入式中断实验报告心得

一、实验背景随着物联网、智能制造等领域的快速发展,嵌入式系统在各个行业中扮演着越来越重要的角色。
中断技术作为嵌入式系统的重要组成部分,对于提高系统的实时性、可靠性和响应速度具有重要意义。
为了更好地掌握中断技术,我进行了嵌入式中断实验,以下是我对实验的心得体会。
二、实验目的1. 理解中断的概念、作用及中断处理流程;2. 掌握嵌入式系统中断的配置方法;3. 学会编写中断服务程序;4. 通过实验验证中断技术的应用效果。
三、实验内容1. 硬件环境:嵌入式开发板、仿真器、连接线等;2. 软件环境:嵌入式操作系统、集成开发环境、仿真器驱动程序等;3. 实验步骤:(1)搭建实验环境,包括硬件连接和软件配置;(2)配置中断源,如GPIO、定时器等;(3)编写中断服务程序,实现中断响应和处理;(4)通过仿真器观察实验效果,验证中断技术。
四、实验心得1. 理解中断原理在实验过程中,我首先学习了中断的基本概念和作用。
中断是指当外部事件发生时,系统暂停当前执行的任务,转而执行中断服务程序,处理外部事件。
通过实验,我明白了中断处理流程,包括中断请求、中断响应、中断处理和中断返回等环节。
2. 中断配置方法在实验中,我学习了如何配置中断源。
以GPIO为例,首先需要设置GPIO引脚为中断模式,然后配置中断触发方式(上升沿、下降沿或双边沿触发),最后设置中断优先级。
通过实验,我掌握了中断配置方法,为后续应用中断技术打下了基础。
3. 编写中断服务程序中断服务程序是中断处理的核心,我通过实验学会了编写中断服务程序。
在编写过程中,需要注意以下几点:(1)保护现场:在中断服务程序开始执行前,需要保存当前CPU状态,如寄存器值等;(2)处理中断:根据中断类型,执行相应的处理逻辑;(3)恢复现场:在中断服务程序执行完毕后,需要恢复CPU状态,以便继续执行被中断的任务。
4. 实验效果验证通过仿真器观察实验效果,我发现中断技术能够有效地提高系统的响应速度和实时性。
嵌入式中断按键实验报告

嵌入式中断按键实验报告本实验的目的是学习如何在嵌入式系统中使用中断来处理按键输入。
通过该实验,我们可以掌握如何配置和使用中断,以及如何编写中断服务程序来处理按键输入。
实验材料:1. 嵌入式开发板2. 按键模块3. 电源适配器实验步骤:1. 将按键模块连接到嵌入式开发板的GPIO引脚上,确保连接正确。
2. 打开开发板的开关,给开发板供电。
3. 在开发板上配置GPIO引脚作为中断输入,并使能中断。
4. 编写中断服务程序来处理按键输入。
当按键被按下时,中断服务程序将被调用,并执行相应的操作。
5. 在主程序中初始化中断服务程序,并进入一个无限循环。
在该循环中,可以进行其他的操作,并等待按键中断的发生。
实验结果:在实验中,我们成功地配置并使用了中断来处理按键输入。
当按键被按下时,中断服务程序被调用,并执行了相应的操作。
讨论与分析:通过该实验,我们学习到了中断的基本原理和使用方法。
中断是一种非常重要的机制,可以使嵌入式系统更高效地响应外部事件。
在实际的嵌入式应用中,按键输入是非常常见的操作,使用中断可以很好地处理按键输入,提高系统的响应速度和可靠性。
然而,中断也存在一些问题。
首先,中断处理需要一定的时间,在高速的系统中,中断的处理时间可能会影响到系统的性能。
另外,当系统存在多个中断源时,中断处理的优先级和调度也需要仔细设计,以确保系统的正常运行。
总结:通过本实验,我们成功地学习了嵌入式系统中使用中断处理按键输入的方法。
中断是一种重要的机制,可以使系统更高效地响应外部事件。
通过合理地设计和使用中断,可以提高系统的性能和可靠性。
在实际的嵌入式应用中,我们应该根据具体的需求和系统条件来选择最合适的中断处理方法,并进行适当的优化和调试。
嵌入式中断的概念和流程

嵌入式中断的概念和流程
嘿,朋友们!今天咱来好好唠唠嵌入式中断这玩意儿。
那嵌入式中断到底是啥呢?就好比你正在家里悠哉地看电视呢,突然门铃响了,这门铃响就相当于中断啦!它会打断你正在做的事情,让你去处理这个新情况。
比如在一个智能设备里,本来它正好好运行着呢,结果来了个紧急信号,就像有人突然拍你一下说:“嘿,有急事!”这时候设备就得赶紧暂停原来的工作,先去处理这个中断。
那嵌入式中断的流程又是怎样的呢?就好像你准备出门,你得先听到门铃声,然后决定去开门,再跟门外的人交流,最后回来继续看电视。
在嵌入式系统里,首先会有一个中断源发出信号,系统就得察觉并接收这个信号,这就像听到门铃响了(比如传感器传来的数据异常啦)。
然后呢,系统要保存当前的状态,就像你赶紧暂停看电视,记住看到哪儿了。
接着,系统会执行对应的中断服务程序,这就好比去跟门外的人说话处理事情。
处理完后,系统再恢复之前的状态,你就又可以回来接着美滋滋地看电视啦。
比如说,你的手机正在播放音乐呢,这时候突然来了个紧急电话,手机不就得中断播放音乐,先去处理这个电话呗。
等电话打完了,又接着放音乐。
这就是嵌入式中断在日常生活中的实际例子啊!
嵌入式中断可重要啦!它就像个机灵的小管家,能让系统快速响应紧急情况,保证一切都能有条不紊地运行。
没了它,那系统可就乱套啦,说不定就会出大问题呢,就像你家没门铃,有人找你都不知道呀!所以说,嵌入式中断真是个神奇又重要的东西呢!。
中断嵌套程序例子
中断嵌套程序例子《中断嵌套程序例子:编程世界中的“套娃”趣事》嘿,大家好呀!今天咱来聊聊中断嵌套程序例子,这可真是编程世界里的一个有趣玩意儿,就像是套娃一样,一层套一层,充满了惊喜和挑战。
想象一下,在程序的世界里,本来一切都按部就班地运行着,突然!一个中断信号闯了进来,就好像是平静的湖面被扔进来了一块大石头,溅起了层层涟漪。
这还不算完,在处理这个中断的时候,嘿,又来一个更紧急的中断,这不是捣乱嘛!但没办法呀,咱程序猿还就得好好应对。
我记得有一次我在写一个程序,就遇到了这种中断嵌套的情况。
本来程序运行得好好的,突然用户点击了一个按钮,这就触发了一个中断。
我正在处理这个中断的时候呢,嘿,系统又检测到一个更重要的事件,得,又嵌套进来一个中断。
我当时就想啊,这程序咋跟那调皮的小孩子一样,净给我找麻烦呢!但是没办法,咱不能被这点小困难打倒呀,只能硬着头皮上了。
于是我就开始小心翼翼地处理这个嵌套中断,就像走钢丝一样,得平衡好每个中断的处理顺序和优先级。
如果弄不好,那可就乱套了,程序可能就会崩溃或者出现各种奇怪的错误。
不过好在我还算有点经验,费了好大功夫总算是把这个嵌套中断给搞定了。
等处理完,我长舒一口气,就像打完了一场硬仗一样,浑身都舒坦了。
说起来,这中断嵌套程序例子还真像是生活中的一些场景。
比如说,你正吃着饭呢,突然电话响了,这就是一个中断。
你正接电话的时候,门铃又响了,这就是嵌套进来的另一个中断。
要是你不能很好地处理这些中断,那可能饭也吃不好,电话也没接好,客人也没招待好。
编程就是这样,充满了挑战和乐趣。
中断嵌套程序例子虽然有时候会让人头疼,但当你成功地处理好它们之后,那种成就感也是无与伦比的。
其实很多时候,我们遇到的困难就像是这些中断嵌套一样,乍一看好像很麻烦,但只要我们冷静下来,理清头绪,一步一步地去处理,总会找到解决的办法。
所以呀,不管是在编程的世界里,还是在我们的生活中,遇到中断嵌套这种情况都不要怕,笑着面对它,加油处理它就好啦!让我们一起在这个充满挑战和乐趣的世界里,勇往直前吧!。
嵌入式-中断实验

嵌入式-中断实验
嵌入式中断实验是一种用来测试和学习嵌入式系统中断功能的实验。
中断是嵌入式系统中常用的一种机制,用于处理紧急事件或高优先级任务。
通过中断,系统可以立即响应外部事件,中断当前正在执行的任务,执行与中断事件相关的代码,然后返回到原来的任务中继续执行。
在进行中断实验时,通常需要以下步骤:
1. 确定中断源:确定要模拟的中断事件,比如外部输入的触发事件、定时器到达时间等。
2. 配置中断控制器:根据硬件平台和实验要求,配置中断控制器的相应寄存器,使其能够正确地处理中断信号。
3. 编写中断服务程序(ISR):定义一个中断服务程序,用于
处理中断事件。
ISR应当对事件进行必要的处理,然后返回到
原来的任务中。
4. 测试和调试:连接硬件平台,运行实验程序,并进行测试和调试,确保中断功能正常工作。
5. 扩展和优化:根据需要,可以进一步扩展和优化中断功能,比如增加多个中断源,实现优先级控制,提高系统响应速度等。
通过嵌入式中断实验,可以深入了解中断机制的工作原理和应用方法,提高对嵌入式系统的理解和能力。
ARM嵌入式系统中触摸屏的中断控制方法
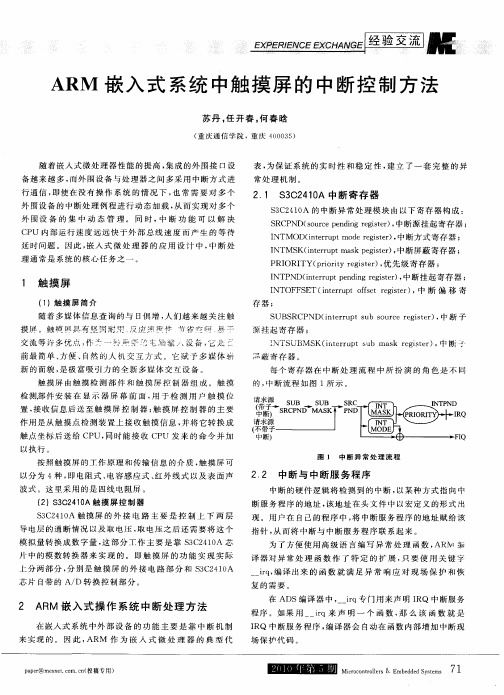
2 2 中 断 与 中 断 服 务 程序 .
中 断 的硬 件 逻辑 将 检 测 到 的 中 断 , 以某 种 方 式 指 向 中 断 服 务 程 序 的 地 址 , 地 址 在 头 文 件 中以 宏 定 义 的 形 式 出 该 现 。用 户 在 自己 的程 序 中 , 中断 服 务 程 序 的 地址 赋 给 该 将 指 针 , 而将 中 断 与 中 断 服 务 程 序联 系起 来 。 从 为 了方 便 使 用 高 级 语 言 编 写 异 常 处 理 函数 , ARM
常处理机制 。
备 越来 越 多 , 而外 围设 备 与处 理 器 之 间 多采 用 中 断 方 式 进
行通信 , 即使 在 没有 操 作 系统 的 情 况 下 , 常 需 要 对 多 个 也 外 围设 备 的 中断 处 理 例 程 进 行 动 态 加 载 , 而实 现 对 多个 从
外 围 设 备 的 集 中 动 态 管 理 。 同 时 , 断 功 能 可 以 解 决 中
译 器 对 异 常处 理 函数 作 了 特 定 的 扩 展 , 要 使 用 关 键 字 只
一
¥ C 4 0 触 摸屏 的 外 接 电 路 主 要 是 控 制 上 下 两 层 3 21A 导电层 的通 断 情 况 以及 取 电压 , 电压 之 后 还 需 要 将 这 个 取 模 拟 量 转 换 成 数 字 量 , 部 分 _ 作 主 要 是 靠 ¥ C2 1 A 芯 这 T 3 40
复 的需 要 。
2 A M 嵌 入 式 操 作 系统 中断处 理 方 法 R
I NTP ND( tru tp n igrgse) 中断 挂 起 寄存 器 ; i er p e dn e i r , n t
arm嵌入式 中断注册函数

arm嵌入式中断注册函数关于ARM嵌入式中断注册函数在ARM嵌入式系统中,中断是一种非常重要的机制,它能够有效地提高系统的响应速度,允许在需要时立即响应某些特定事件。
中断通常由外设或者内核生成,并且它们的处理程序也是由软件编写的。
在ARM Cortex-M系列处理器中,中断的处理和管理是通过中断向量表来实现的。
中断向量表是一个包含了中断处理程序地址的表,每个中断都有一个对应的唯一的中断向量表项。
当一个中断发生时,处理器会在中断向量表中查找对应的中断向量表项,并从中取出对应的中断处理程序的地址,然后跳转到该地址执行中断处理程序。
在ARM嵌入式系统中,我们可以通过注册中断处理函数来定义中断的处理方式。
中断注册函数是负责将用户定义的中断处理函数的地址写入中断向量表中的函数。
在本文中,我们将详细介绍ARM嵌入式系统中的中断注册函数的实现步骤。
1. 确定中断号在注册中断处理函数之前,首先需要确定需要注册的中断号。
中断号是一个唯一标识每个中断的数字,它代表了中断向量表中的偏移量。
可以在处理器手册或者开发板的文档中找到相应的中断号编号。
2. 编写中断处理函数根据需要,编写具体的中断处理函数。
中断处理函数通常会执行一系列任务,如保存寄存器状态、处理中断发生的事件等。
在编写中断处理函数时,需要遵循一定的编程规范和要求,以确保中断的及时响应和正确处理。
3. 定义中断处理函数的地址在C/C++中,中断处理函数的地址可以通过函数指针来表示。
将中断处理函数定义为一个函数指针,可以方便地在后续的步骤中操作。
在定义中断处理函数的地址时,要注意函数指针的类型和中断处理函数的类型必须匹配。
4. 修改中断向量表中断向量表是一个位于特定内存位置的数组,用于存储中断处理函数的地址。
我们需要将中断处理函数的地址写入到对应中断号的中断向量表项中。
具体的实现方式可以通过直接修改内存中的中断向量表,或使用相关的指令来实现,如LDR和STR指令。
嵌入式系统 编程题汇编
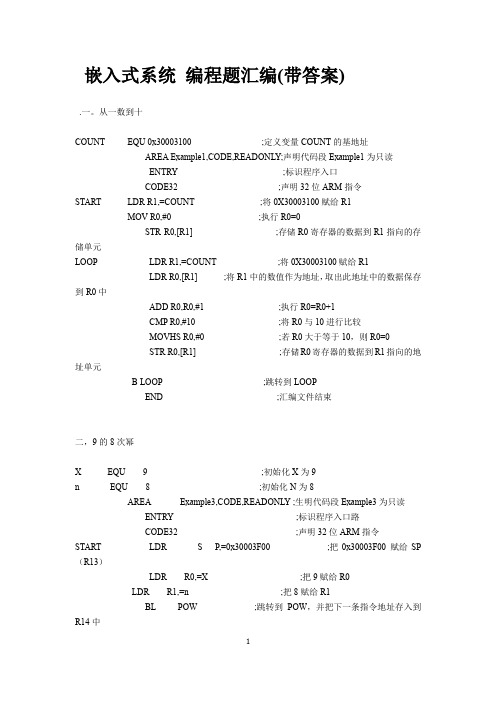
嵌入式系统编程题汇编(带答案).一。
从一数到十COUNT EQU 0x30003100 ;定义变量COUNT的基地址AREA Example1,CODE,READONL Y;声明代码段Example1为只读ENTRY ;标识程序入口CODE32 ;声明32位ARM指令START LDR R1,=COUNT ;将0X30003100赋给R1MOV R0,#0 ;执行R0=0STR R0,[R1] ;存储R0寄存器的数据到R1指向的存储单元LOOP LDR R1,=COUNT ;将0X30003100赋给R1LDR R0,[R1] ;将R1中的数值作为地址,取出此地址中的数据保存到R0中ADD R0,R0,#1 ;执行R0=R0+1CMP R0,#10 ;将R0与10进行比较MOVHS R0,#0 ;若R0大于等于10,则R0=0STR R0,[R1] ;存储R0寄存器的数据到R1指向的地址单元B LOOP ;跳转到LOOPEND ;汇编文件结束二,9的8次幂X EQU 9 ;初始化X为9n EQU 8 ;初始化N为8AREA Example3,CODE,READONL Y ;生明代码段Example3为只读ENTRY ;标识程序入口路CODE32 ;声明32位ARM指令START LDR S P,=0x30003F00 ;把0x30003F00 赋给SP (R13)LDR R0,=X ;把9赋给R0LDR R1,=n ;把8赋给R1BL POW ;跳转到POW,并把下一条指令地址存入到R14中HALT B HALT ;等待跳转POW STMFD SP!,{R1-R12,LR} ;将R1-R12入栈,满递减堆栈MOVS R2,R1 ;将R1赋给R2,并影响标志位MOVEQ R0,#1 ;若Z=1,则R0=1BEQ POW_END ;若Z=1,跳转到POW_ENDMOV R1,R0 ;将R0中值赋给R1SUB R2,R2,#1 ;将R2-1的只赋给R2POW_L1 BL DO_MUL ;跳转到DO-MUL,并把下一条指令地址存入R14中SUBS R2,R2,#1 ;将R2-1的值赋给R2,并影响标志位BNE POW_L1 ;若Z=0,跳转到POW_L1POW_END LDMFD SP!,{R1-R12,PC} ;数据出栈,存入到R1-R12,PC中DO_MUL MUL R0,R1,R0 ;把R1*R0的值赋给R0MOV PC,LR ;LR中的值赋给PCEND ;汇编结束三:从一一直加到一百程序清单(一)C 语言实验参考程序#define uint8 unsigned char ;定义一个无符号字符常量uint8#define uint32 unsigned int ;定义一个无符号整形常量unint32#define N 100 ;定义一个常量N=100(宏定义,100用N代替)uint32 sum; ;定义sum为无符号整型常量(声明一个unsigned int型的变量sum)void Main(void);主函数{uint32 i; ;定义无符号整型常量i(声明一个unsigned int型的变量i)sum=0; ;sum初始值为0for(i=0;i<=N;i++);i在N内自增加1(i从0开始,i<=N时循环成立){sum+=i;} ;把sum+i赋给sumwhile(1); ;为真循环}程序清单(二)简单的启动代码IMPORT |Image$$RO$$Limit | ;R0输出段存储区域界限IMPORT |Image$$RW$$Base | ;RW输出段运行时起始地址IMPORT |Image$$ZI$$Base | ;ZI输出段运行时起始地址IMPORT |Image$$ZI$$Limit | ;ZI输出段存储区域界限IMPORT Main ;主函数AREA Start,CODE,READONL Y ;声明代码段start,为只读ENTRY ;程序入口CODE32 ;声明32位ARM指令Reset LDR SP,=0x40003f00 ;将0x40003f00赋给SPLDR R0,=|Image$$RO$$Limit| ;将R0输出段存储区域界限赋给R0 LDR R1,=|Image$$RW$$Base | ;将RW输出段运行时起始地址赋给R1LDR R3,=|Image$$ZI$$Base | ;将ZI输出段运行时起始地址赋给R3CMP R0,R1 ;比较R0和R1,相等Z=1,反之Z=0BEQ LOOP1 ;若Z=1,则跳到LOOP1LOOP0 CMP R1,R3 ;比较R1和R3,若R1<R3,C=0LDRCC R2,[R0],#4 ;若C=0,读取R0地址单元内容并且存入R2,且R0=R0+4STRCC R2,[R1],#4 ;若C=0,读取R2中的数据存入R1,且R1=R1+4BCC LOOP0 ;若C=0,跳转到LOOP0LOOP1 LDR R1,=|Image$$ZI$$Limit| ;将ZI输出段存储区域赋给R1MOV R2,#0 ;把0赋给R2LOOP2 CMP R3,R1 ;比较R1和R3,若R1<R3,C=0STRCC R2,[R3],#4 ;若C=0,将R2中数据保存到内存单元R3中,且R3=R3+4BCC LOOP2 ;若C=0,跳转到LOOP2B Main ;跳转到主程序END ;汇编结束实验四程序清单(一)C 语言调用汇编的参考程序#define uint8 unsigned char ;定义一个无符号字符常量uint8#define uint32 unsigned int ;定义一个无符号整型常量.uint32extern uint32 Add(uint32 x,uint32 y); //声明子程序Add为一个无符号整型常量,它为2个无符号整型常量x,y的和uint32 sum; ;定义sum为无符号整型常量void Main(void);无返回主程序{sum=Add(555,168); ;sum等于555+168while(1); ;为真循环}程序清单(二)汇编加法函数程序EXPORT Add ;声明子程序Add方便调用AREA Start,CODE,READONL Y ;声明代码段start,为只读ENTRY ;程序入口CODE32 ;声明32位ARM指令Add ADD R0,R0,R1 ;将R0+R1值赋给R0MOV PC,LR ;将LR值赋给PCEND ;汇编结束14、设计编程:LPC2131的P0.7引脚连接了一个蜂鸣器,编程发出等周期的滴滴声。
中断服务函数嵌入式 -回复
中断服务函数嵌入式-回复什么是中断服务函数?中断服务函数(Interrupt Service Routine,简称ISR)是一种特殊的函数,用于处理由硬件或软件所引发的中断事件。
中断事件是一个在CPU 执行某个任务时,为了响应外部事件而中止当前任务的过程。
当中断事件发生时,中断控制器会通知CPU,CPU暂停当前任务,跳转到相应的中断服务函数来处理中断事件。
中断服务函数是一种在嵌入式系统中常用的处理中断事件的方式。
中断服务函数的执行过程:1. 中断事件:中断事件可以是硬件上的外部事件(例如外部设备的输入信号、定时器到达指定时间)或软件上的内部事件(例如错误、系统调用)。
2. 中断请求(IRQ):当中断事件发生时,硬件会向CPU发送中断请求信号(IRQ)。
IRQ是一种特殊的硬件信号,用于通知CPU发生了中断事件。
3. 中断控制器:中断控制器是一种硬件设备,负责接收来自各个外设的中断请求信号,并将这些中断请求信号按优先级进行整理和分配给CPU。
常见的中断控制器有8259A(PIC)和APIC等。
4. 中断向量表:中断向量表是一种特殊的数据结构,用于存储不同中断事件对应的中断服务函数的入口地址。
当CPU收到中断请求后,会根据中断请求的编号从中断向量表中查找相应的中断服务函数的入口地址。
5. 中断服务函数:中断服务函数是一段处理中断事件的代码,它会从中断发生的位置保存CPU的现场(例如程序计数器、寄存器状态等),然后执行中断服务函数中的代码。
中断服务函数的执行可能包含与中断事件相关的硬件操作、数据处理、状态更新等。
执行完中断服务函数后,CPU会恢复保存的现场,继续执行之前中断发生的位置。
6. 中断服务函数返回:中断服务函数执行完成后,CPU会通过RET指令返回到之前中断发生的位置,继续执行被中断的任务。
编写中断服务函数的步骤:1. 确定中断事件:首先要明确需要处理的中断事件是什么,是硬件上的外部事件还是软件上的内部事件。
嵌入式系统――体系结构、编程与设计

嵌入式系统――体系结构、编程与设计嵌入式系统是一种特殊的计算机系统,它被设计用来完成特定的任务。
它通常集成在其他产品或系统中,比如汽车、家电、医疗设备等等。
嵌入式系统的体系结构、编程和设计是关键的方面,决定了系统的性能和功能。
嵌入式系统的体系结构是指系统的硬件组成和组织方式。
嵌入式系统通常采用定制化的硬件设计,与通用计算机系统有所不同。
它们通常具有较小的体积和较低的功耗要求,并且需要满足特定的实时性和可靠性需求。
嵌入式系统的体系结构包括处理器、存储器、外设等组件的选择和组织方式,以及系统的总线结构、中断处理等。
嵌入式系统的编程是指为系统编写软件的过程。
由于嵌入式系统的硬件和软件紧密耦合,编程需要考虑硬件的特性和限制。
常见的嵌入式系统编程语言包括C、C++、汇编等,开发工具包括编译器、调试器等。
在编程过程中,需要理解并利用系统提供的接口和功能来实现所需的功能。
此外,由于嵌入式系统通常对资源有限,编程需要注意优化代码,减小系统的资源占用。
嵌入式系统的设计是指系统功能和性能的设计。
在设计过程中,需要明确系统的需求和目标,并根据需求选择合适的硬件和软件组件。
设计还需要考虑系统的实时性、可靠性和安全性等方面的要求。
此外,设计还需要考虑系统的可维护性和可扩展性,以便在后续的升级和维护过程中更加方便和高效。
嵌入式系统的体系结构、编程和设计是相互关联的,它们共同决定了系统的性能和功能。
在嵌入式系统开发过程中,需要综合考虑这些方面,以满足系统的需求并提供良好的用户体验。
同时,嵌入式系统的开发也需要团队合作,包括硬件工程师、软件工程师、测试工程师等的协同工作。
总结起来,嵌入式系统的体系结构、编程和设计是嵌入式系统开发过程中的关键方面。
通过合理的体系结构设计、优化的编程和精心的系统设计,可以实现嵌入式系统的高性能和丰富的功能,从而满足用户的需求。
嵌入式系统的发展将继续推动物联网、智能家居、智能交通等领域的发展,为人们的生活带来更多的便利和舒适。
中断嵌套的实验报告

一、实验目的1. 理解中断嵌套的概念和原理。
2. 掌握51单片机中断嵌套的实现方法。
3. 熟悉中断优先级设置和中断屏蔽位的控制。
4. 通过实验加深对中断嵌套在实际应用中的理解。
二、实验原理中断嵌套是指在中断服务程序(ISR)执行过程中,允许更高优先级的中断打断当前正在执行的中断服务程序,从而提高系统的灵活性和响应速度。
在51单片机中,中断嵌套的实现依赖于中断优先级的设置和中断屏蔽位的控制。
三、实验器材1. 51单片机开发板2. Keil uVision4集成开发环境3. Proteus仿真软件4. LED灯8个5. 连接线若干四、实验步骤1. 搭建电路:根据实验要求,连接51单片机、LED灯和相应的引脚。
2. 编写程序:a. 初始化51单片机系统,包括设置中断优先级和中断屏蔽位。
b. 编写两个中断服务程序,分别对应两个不同的中断源。
c. 在主函数中设置中断触发条件,例如检测按钮按下。
3. 仿真测试:a. 使用Proteus仿真软件进行仿真测试。
b. 观察LED灯的响应情况,验证中断嵌套是否成功实现。
五、实验结果与分析1. 实验结果:a. 当按钮按下时,高优先级中断服务程序先被触发,LED灯按照预设的方式闪烁。
b. 当高优先级中断服务程序执行过程中,低优先级中断触发,系统实现中断嵌套,低优先级中断服务程序被执行。
c. 低优先级中断服务程序执行完毕后,系统返回高优先级中断服务程序,继续执行剩余部分。
2. 实验分析:a. 通过设置中断优先级,可以实现不同中断源的响应顺序。
b. 通过控制中断屏蔽位,可以防止中断嵌套过程中发生中断冲突。
c. 实验结果表明,中断嵌套在提高系统响应速度和灵活性方面具有重要作用。
六、实验总结1. 本实验成功实现了51单片机中断嵌套,加深了对中断嵌套原理和实现方法的理解。
2. 通过实验,掌握了中断优先级设置和中断屏蔽位的控制技巧。
3. 中断嵌套在实际应用中具有广泛的应用前景,可以提高系统性能和响应速度。
嵌入式系统中设计中断服务程序的基本原则

一、介绍嵌入式系统中设计中断服务程序的背景及重要性嵌入式系统是一种特殊的计算机系统,它通常被用于嵌入在其他设备中,用来控制设备的运行和功能。
在嵌入式系统中,中断服务程序是一个非常重要的组成部分。
中断是一种机制,可以在系统执行某个任务的过程中,暂时中止当前任务的执行,转而去执行另一个任务。
中断服务程序是为了响应中断事件而设计的程序,它负责在中断发生时保存当前状态、执行相应的处理程序、然后恢复之前的状态,让被中断的任务能够继续执行。
二、中断服务程序的设计原则在设计嵌入式系统中的中断服务程序时,有一些基本的原则需要遵循,以保证系统的稳定性和可靠性。
1. 可重入性中断服务程序必须是可重入的。
这意味着这个程序可以在其中断的情况下被再次调用,而不会导致不可预测的错误。
这是因为在中断处理过程中,有可能会再次收到同样的中断信号。
如果中断服务程序不是可重入的,那么当它正在执行时再次被调用,就会发生错误。
2. 快速响应中断服务程序必须能够迅速响应中断事件。
在某些情况下,中断的响应时间对系统的性能和稳定性有很大影响。
设计中断服务程序时需要尽量减少其执行时间,以确保系统能够及时处理中断事件。
3. 最小化对全局变量的使用中断服务程序应尽量避免使用全局变量。
这是因为在中断服务程序执行过程中,有可能会发生并发访问全局变量的情况,从而导致数据一致性问题。
为了避免这种情况,可以在中断服务程序中使用局部变量或者禁止中断的方式来保护全局变量。
4. 合理的优先级在设计中断服务程序时,还需要考虑中断的优先级。
不同的中断事件可能有不同的优先级,需要根据实际情况来进行合理的设置。
这样可以确保系统能够在不同的中断事件发生时能够按照一定的顺序来处理。
5. 状态保存和恢复在中断服务程序中,需要及时保存当前任务的状态,以便在处理完中断事件后能够恢复到之前的状态并继续执行。
这也是中断服务程序的一个重要功能,需要在设计中充分考虑。
6. 可靠性和稳定性在设计中断服务程序时,需要考虑系统的可靠性和稳定性。
嵌入式系统实验报告-1-外部中断

《嵌入式系统技术》实训报告1、实验目的z了解S3C2440A 外部中断的工作原理。
z掌握S3C2440A 外部中断的使用方法。
2、实验设备z PC 机、Multi-ICE 仿真器、2440A 实验箱。
3、实验内容z通过外部K1、K2、K3、K4、K5、K7 按键触发外部中断E INT1、EINT2、EINT3、EINT4、EINT5、EINT74、实验原理4.1 ARM 的异常中断类型在嵌入式系统中外部设备的功能实现主要是靠中断机制来实现的。
中断功能可以解决CPU 内部运行速度远远快于外部总线速度而产生的等待延时问题。
ARM 提供的FIQ 和IRQ 异常中断用于外部设备向C PU 请求中断服务,一般情况下都是采用I RQ 中断。
七种异常中断中断过程框图4.2 异常中断响应过程和返回过程异常中断的响应过程:1).保存处理器当前状态寄存器C PSR 的值到备份程序状态寄存器S PSR 中。
2).设置但前程序状态寄存器CPSR 的值,其中包括:设置CPSR 响应位的值,使处理器进入特定的处理器模式;按要求屏蔽中断,通常应该屏蔽I RQ 中断。
在F IQ 中断时屏蔽F IQ 中断。
3).设置L r 寄存器。
将相应中断模式的L r 寄存器的值设为异常中断的返回地址。
4).处理程序计数器PC,将PC 值设为相应的中断向量的地址,从而实现跳转以执行中断服务程序。
异常中断的返回当处理器执行完以上流程之后,处理器已经从中断向量进入异常处理的状态。
异常中断处理完毕之后,在异常中断程序的末端,处理器进入异常中断的返回状态,其流程如下:1).恢复状态寄存器。
将保存的备份程序状态寄存器SPSR 值赋给当前程序状态寄存器CPSR。
2).将返回地址赋值到程序计数器(PC)。
这样程序将返回到异常中断产生的下一条指令或出现问题的指令处执行。
需要注意的是:对于不同的异常中断,其返回地址的计算方法也是不同的,IRQ 和F IQ 异常中断产生时,程序计数器PC 已经更新,而SWI 中断和未定义指令中断时由当前指令自身产生的,程序计数器P C 尚未更新,所以要计算出下一条指令的地址来执行返回操作;指令预取指中指异常中断和数据访问中断要求,返回到出现异常的执行现场,重新执行操作。
嵌入式实验3按键实验(中断方式)
嵌入式实验3按键实验(中断方式)河南机电高等专科学校《嵌入式系统开发》课程实验报告系部:电子通信工程系班级:电信1##姓名: ######学号: 120######实验三按键实验(中断方式)一.实验简介在实验一的基础上,使用按键控制流水灯。
二.实验目的熟练使用库函数操作GPIO,掌握中断配置和中断服务程序编写方法,掌握通过全局变量在中断服务程序和主程序间通信的方法。
三.实验内容实现初始化GPIO,并配置中断,在中断服务程序中通过修改全局变量,达到控制流水灯速度及方向。
下载代码到目标板,查看运行结果。
四.实验设备硬件部分:PC计算机(宿主机)、STM32实验板。
软件部分:PC机WINDOWS系统、MDK KEIL软件、ISP软件。
五.实验步骤1在实验一代码的基础上,编写中断初始化代码2在主程序中声明全局变量,用于和中断服务程序通信,编写完成主程序3编写中断服务程序4编译代码,下载到实验板5.单步调试6记录实验过程,撰写实验报告六.实验结果及测试中断方式的按键式实验,是通过配置外部中断寄存器和中断嵌套(NVIC)控制器来实现按键按下控制LED灯亮灭。
通过按键中断打断主函数,执行LED1取反一次。
主函数初始化中断配置和LED配置,点亮LED1后一直等待中断,每中断一次,LED1取反一次。
int main(void){LED_GPIO_Config();LED1_ON;CLI();SEI();EXTI_PA0_Config();while(1){}}中断嵌套控制寄存器的配置为中断嵌套分组1;抢占优先级0;响应优先级0 代码如下:void NVIC_Configuration(void){NVIC_InitTypeDef NVIC_InitStructure;NVIC_PriorityGroupConfig(NVIC_PriorityGroup_1);NVIC_InitStructure.NVIC_IRQChannel = EXTI0_IRQn;NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0;NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0;NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;NVIC_Init(&NVIC_InitStructure);}外部中断按键的配置源码如下:配置PA0位中断线,并使能AFIO 时钟void EXTI_PA0_Config(void){GPIO_InitTypeDef GPIO_InitStructure;EXTI_InitTypeDef EXTI_InitStructure;RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA | RCC_APB2Periph_AFIO,ENABLE);NVIC_Configuration();GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD;GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_EXTILineConfig(GPIO_PortSourceGPIOA,GPIO_PinSource0);EXTI_InitStructure.EXTI_Line = EXTI_Line0;EXTI_InitStructure.EXTI_Mode = EXTI_Mode_Interrupt;EXTI_InitStructure.EXTI_Trigger = EXTI_Trigger_Rising;EXTI_InitStructure.EXTI_LineCmd = ENABLE;EXTI_Init(&EXTI_InitStructure);}产生中断后程序进入中断服务子程序,将LED1取反,并软件清除标志位,中断服务子程序如下:void EXTI0_IRQHandler(void){if(EXTI_GetITStatus(EXTI_Line0) != RESET){LED1_TOGGLE;EXTI_ClearITPendingBit(EXTI_Line0);}}七.实验总结通过这次实验,课程知识的实用性很强,因此实验就显得非常重要,刚开始做实验的时候,由于自己的理论知识基础不好,在实验过程遇到了许多的难题,也使我感到理论知识的重要性。
描述ucos中中断实现过程 -回复
描述ucos中中断实现过程-回复UCOS中的中断实现过程在嵌入式系统中,中断是一种常见的机制,用于处理紧急事件和响应外部设备的请求。
中断可以打破程序的正常顺序执行,将处理器的控制权转移到一个特殊的处理函数,在完成相关任务后再返回到被中断的位置。
在本文中,我们将详细讨论UCOS中中断的实现过程,从中断的触发到处理函数的执行,以及恢复正常程序执行的过程。
一、中断的概念和分类在开始讨论UCOS中的中断实现过程之前,我们先了解一下中断的概念和分类。
中断是指在程序正常执行的过程中,由于硬件或软件的触发,使处理器暂时停下目前正在执行的任务,转而去执行一个特定的中断服务程序。
中断可以分为外部中断和内部中断两种类型。
1. 外部中断:外部中断是由外部设备触发的,如按键的按下、定时器的溢出等。
外部中断需要通过硬件电路来检测和触发,然后通过中断控制器将中断请求信号发送给处理器。
2. 内部中断:内部中断是由处理器内部的异常或错误触发的,如除零错误、非法指令执行等。
内部中断是由处理器内部的各种异常检测电路自动触发的。
UCOS中的中断实现过程主要是针对外部中断的,它涉及到如何检测和响应外部中断请求,并且在中断处理函数执行完成后,恢复正常的程序执行顺序。
二、UCOS中的中断处理器UCOS中的中断处理器是使用硬件中断控制器来检测和响应外部中断请求的。
硬件中断控制器的作用是将外部中断请求信号转换为中断向量,并将处理器的控制权转移到对应的中断处理函数。
UCOS可以使用多种硬件中断控制器,如8259A芯片、PIC芯片、ARM 内核自带的中断控制器等。
具体使用哪种硬件中断控制器,取决于嵌入式系统的硬件架构和具体需求。
实现中断处理的第一步是配置硬件中断控制器,使其能够正确检测和响应外部中断请求。
相关配置包括中断优先级设置、中断请求触发方式、中断控制器的初始化等。
三、UCOS中的中断向量表中断向量表是用来存放中断处理函数地址的数据结构,每个中断向量表项对应一个外部中断请求。
嵌入式系统中的中断处理
嵌入式系统中的中断处理在嵌入式系统中,中断处理是一项至关重要的任务。
中断是指由硬件或软件引发的事件,它打断了CPU的正常执行流程,需要在最短的时间内进行响应和处理。
本文将详细探讨嵌入式系统中的中断处理过程以及相关的技术和策略。
一、中断的概念与分类中断是指CPU接收到一个来自硬件或软件的信号,要求其立即停止正在执行的任务,转而执行一个与之相关的处理程序。
根据中断的来源,可以将中断分为硬件中断和软件中断两种类型。
硬件中断是由外设或内部电路触发的,它可以是定时器超时、外部设备请求等。
硬件中断一般由硬件电路直接与CPU相连,并通过电平或脉冲等信号进行触发。
软件中断是由软件指令触发的,它包括系统调用、异常、陷入等。
软件中断通常是由程序员通过编写相关的中断处理程序来触发和处理的。
二、嵌入式系统中的中断处理过程1. 中断请求与触发当一个中断事件发生时,外设或软件将向CPU发送一个中断请求信号。
CPU在接收到中断请求信号后,需要及时进行中断处理。
在硬件中,中断请求信号通常是通过IRQ(中断请求)引脚发送给CPU;在软件中,通过相关的指令将中断请求传递给CPU。
2. 中断响应与保存上下文CPU在接收到中断请求信号后,需要立即停止当前执行的指令,并保存当前正在执行的程序状态。
这个过程称为中断响应。
为了保存中断发生时的上下文环境,CPU会将当前的程序计数器PC、状态寄存器和一些重要的寄存器的值保存到特定的内存中,以便在中断处理结束后能够正确地恢复现场。
3. 中断处理程序的执行中断处理程序是用来处理中断事件的代码段,它通常被事先定义和初始化。
当中断响应完成后,CPU会跳转到对应的中断处理程序的入口地址开始执行。
中断处理程序根据中断类型进行相应的处理,可以包括读取和处理外设数据、更新系统状态、保存和恢复其他寄存器等操作。
4. 中断处理程序的结束与恢复现场在中断处理程序执行完毕后,CPU会根据程序计数器PC中保存的值,返回到中断发生前的执行状态,即恢复现场。
stm32 gpio中断 引脚 电平状态 -回复
stm32 gpio中断引脚电平状态-回复stm32 gpio中断是一种常见的嵌入式系统编程技术,用于检测引脚的电平状态并在特定条件下触发中断。
引脚的电平状态可以是高电平、低电平或者在特定条件下发生变化。
本文将详细介绍stm32 gpio中断的原理、配置以及使用方法。
第一部分:stm32 gpio中断的原理在了解stm32 gpio中断的配置和使用方法之前,我们需要先了解一些基本概念和原理。
stm32微控制器的gpio引脚可以用于输入和输出操作。
当引脚配置为输入模式时,可以检测引脚的电平状态;当引脚配置为输出模式时,可以控制引脚输出的电平。
stm32 gpio中断是通过将引脚配置为输入模式,并设置相应的触发条件来实现的。
当满足触发条件时,引脚的电平状态将发生变化并触发中断。
中断可以是外部中断,也可以是内部中断(也称为事件中断)。
外部中断是由外部信号触发的,而内部中断是由内部事件触发的,如定时器溢出或者其他模块的状态变化。
第二部分:stm32 gpio中断的配置stm32 gpio中断的配置一般包括以下几个步骤:1. 配置gpio引脚的模式和速度。
首先,需要选择引脚的模式,即输入模式或输出模式,并设置引脚的速度。
引脚的速度可以选择低速、中速或高速,根据实际需求进行配置。
2. 配置中断触发条件。
这一步是配置gpio引脚的中断触发条件。
stm32提供了多种触发条件,如上升沿触发、下降沿触发、边沿触发等。
根据实际需求选择合适的触发条件,并将其配置到引脚的中断触发寄存器中。
3. 配置中断分组优先级。
当多个中断同时触发时,中断控制器根据中断分组优先级来确定中断的优先级顺序。
stm32提供了多种中断分组优先级的配置方式,如全局配置、单个配置和组合配置。
4. 使能中断和中断向量表。
最后,需要使能gpio引脚的中断,并在中断向量表中设置相应的中断处理函数。
中断处理函数是用于处理中断事件的函数,其功能与常规的函数类似,但它有一些特殊的约束和操作。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
②接下来是编号3的或门,这个或门的另一个输入是“软件中断/事 件寄存器”,从这里可以看出,软件可以优先于外部信号请求一个 中断或事件,既当“软件中断/事件寄存器”的对应位为“1”时,不 管外部信号如何,编号3的或门都会输出有效信号。
③一个中断或事件请求信号经过编号3的或门后,进入“登记(挂 起)请求寄存器” ,到此,中断和事件的信号传输通路都是一致的 ,也就是说, “登记(挂起)请求寄存器”中记录了外部请求信号 。
STM32F10x
/* Peripheral base address in the bit-band region */ #define PERIPH_BASE ((u32)0x40000000) /* Peripheral memory map */ #define APB1PERIPH_BASE #define APB2PERIPH_BASE #define AHBPERIPH_BASE PERIPH_BASE (PERIPH_BASE + 0x10000) (PERIPH_BASE + 0x20000)
STM32F10x
1.1.2 STM32 单片机的 EXTI线路 (或 STM32 单片机的 GPIO 与 EXTI 的映射关系)
STM32单片机的112个通用I/O端口线(口的某一位,称为口线 )以下图的方式连接到16个外部中断/事件(EXTIx)线上:------其 中每根EXTIx线上 可接 PAx~PGx共7个通用I/O端口线其中之一。 x=0~15。(16*7=112)
STM32单片机的 可屏蔽中断通道 对应的中断向量表 位置 优先级 优先级 名称 说明 地址 类型
……
1
……
8
可设置 PVD
连接到EXTI的电源电 压检测(PVD)中断
0x0000_ 0044
0x0000_ 0058 0x0000_ 005C
6 7
13 14
可设置 EXTI0 EXTI线0中断 可设置 EXTI1 EXTI线1中断
0x0000_ 009C
40 41 42
……
47 48 49
可设置 EXTI15_10 EXTI线[15:10]中断 0x0000_ 00E0 可设置 RTCAlarm 连接到EXTI的RTC 闹钟中断 可设置 USB唤醒 连接到EXTI的从 USB待机唤醒中断 0x0000_ 00E4 0x0000_ 00E8
在这个通道上有4个控制部分 ①外部的信号首先经过边沿检测电路,这个边沿检测电路受上升沿 或下降沿选择寄存器控制,用户可以使用这两个寄存器控制需要哪 一个边沿产生中断,因为选择上升沿或下降沿是分别受2个平行的 寄存器同时控制,所以用户可以同时选择上升沿或下降沿,而如果 只有一个寄存器控制,那么只能选择一个边沿了。
EXTI外部中断/事件寄存器组 的首地址:
0x40010400
#define EXTI_BASE
(APB2PERIPH_BASE + 0x0400)
#ifdef _EXTI
#define
STM32F10x
EXTI
((EXTI_TypeDef *) EXTI_BASE)
#endif /*_EXTI */
STM32F10x
2、
外部事件
的请求机制
图中红色虚线箭头,标出了外部事件信号的传输路径:外 部请求信号经过编号3的或门后,进入编号5的与门,这个 与门的作用与编号4的与门类似,用于引入“事件屏蔽寄 存器”的控制;最后脉冲发生器把一个跳变的信号(边沿 检测电路检测到的 跳变信号)转变为一个单脉冲,输出到芯 片中的其它功能模块。
STM32F10x
STM32F10x
1.1.3
STM32 单片机的 EXTI配置
1、EXTI (外部中断/事件)
2、GPIO_EXTILineConfig
定义
选择GPIO管脚接EXTIx线
3、EXTI_InitTypeDef 初始化EXTI参数 定义
4、EXTI_Init
初始化EXTI 定义
1、EXTI 每个EXTI:共有6个设置寄存器
在文件“stm32f10x_gpio.h”中,定义
/* GPIO Port Sources ---------------------------------------------------------*/ #define GPIO_PortSourceGPIOA ((u8)0x00) #define GPIO_PortSourceGPIOB ((u8)0x01) #define GPIO_PortSourceGPIOC ((u8)0x02) #define GPIO_PortSourceGPIOD ((u8)0x03) #define GPIO_PortSourceGPIOE ((u8)0x04) #define GPIO_PortSourceGPIOF ((u8)0x05) #define GPIO_PortSourceGPIOG ((u8)0x06)
bit) ,当其为1时,登记了外部请求信号。
E
STM32F10x
1、EXTI外部中断/事件 定义
编程时, EXTI外部中断/事件的具体配置是从EXTI寄存器组开始。 首先,用结构体EXTI_TypeDef 定义 EXTI寄存器组: 在文件“stm32f10x_map.h”中定义如下: typedef struct { vu32 IMR; vu32 EMR; vu32 RTSR; vu32 FTSR; EXTI外部中断/事件的6个设置寄存器 vu32 SWIER; vu32 PR; } EXTI_TypeDef; //用结构体EXTI_TypeDef 定义EXTI外部中断/事件 //或称用结构体EXTI_TypeDef 定义EXTI寄存器组
PAx、 PBx、 PCx、 PDx 和 PEx端口的相同口线 对应的是 同 一个外部中断/事件源EXTIx(x:0~15)。 注意: ∵配置GPIO口线上的EXTI (外部中断/事件),是通过 AFIO_EXTICRx寄存器来进行的。∴使用前,必须先使能AFIO时钟。 虽然,挂接在APB2总线上的,既有EXTI外设,又有AFIO外设,但 当使用EXTI外设时,使能时钟的是使能AFIO时钟。
(即APB2 clock)
(EXTI线)
STM32F10x
STM32单片机的 EXTI(外部中断与外部事件) 控制器结构框图
STM32 单片机的外部中断、外部事件机制
1、 2、
外部中断 的请求机制 外部事件 的请求机制 中断 和 事件的比较
1、 外部中断
的请求机制
图中的蓝色虚线箭头,标出了外部中断信号的传输路径:首先外 部信号从编号1的芯片引脚进入,经过编号2的边沿检测电路, 通过编号3的或门进入中断“登记(挂起)请求寄存器”,最后 经过编号4的与门输出到M3内核的NVIC中断控制器。
62
69
可设置 ETH_WKU 连接到EXTI的以太 0x0000_ P 0138 网唤醒中断
注意:
位 置
……
优先级 优先级 名称 类型 48
说明
地址
41
……
可设置 RTCAlarm 连接到EXTI的RTC 0x0000_ 00E4 闹时中断
不 同
3 10 可设置 RTC 实时时钟(RTC) 0x0000_ 009C 全局中断
STM32F10x
另外,在固件库函数RCC_APB2PeriphClockCmd ( )中:参数 RCC_APB2Periph指定的APB2外设,不包括EXTI外设,即固件 库函数不能使能EXTI外设对应的时钟。
另外四个EXTI线的连接方式如下: ● EXTI线16连接到PVD(电源电压检测)输出 ● EXTI线17连接到RTC闹钟事件 ● EXTI线18连接到USB唤醒事件 ● EXTI线19连接到以太网唤醒事件(只适用于互联型产品) STM32F10x
……
STM32F10x
外部中断配置寄存器1 (AFIO_EXTICR1)
STM32F10x
外部中断配置寄存器2 (AFIO_EXTICR2)
STM32F10x
外部中断配置寄存器3 (AFIO_EXTICR3)
STM32F10x
外部中断配置寄存器4 (AFIO_EXTICR4)
STM32F10x
1.1.3
STM32 单片机的 EXTI配置
1.1.1
STM32 单片机的 EXTI工作机制
对于互联型产品,外部中断/事件控制器由20个产生事件/中断请求 的边沿检测器组成; 对于其它产品,则由19个能产生事件/中断请求的边沿检测器组成 。如下图所示。 每个输入线可以独立地配置输入类型(脉冲或挂起)和对应的触发事 件(上升沿或下降沿或者双边沿都触发)。每个输入线都可以独立地 被屏蔽。挂起寄存器保持着状态线的中断请求。
8
9 10
15
16 17
可设置 EXTI2 EXTI线2中断
可设置 EXTI3 EXTI线3中断 可设置 EXTI4 EXTI线4中断
0x0000_ 0060 0x0000_ 0064 0x0000_
位 置
……
优先级 优先级 名称 类型 30
TI线[9:5]中断
③上升沿触发选择寄存器(EXTI_RTSR) : RTSR--Rising trigger
selection register, 用于屏蔽(或开放)来自输入线X上的上升沿触发(中断和事 件)
④下降沿触发选择寄存器(EXTI_FTSR): FTSR--Falling trigger
selection register, 禁止输入线x上的下降沿触发(中断和事件)
中断
和
事件的比较
在这张图上我们也可以知道, 从外部激励信号来看,中断和事件是没有分别的, 只是在芯片内部分开,一路信号会向CPU产生中断请求,另一路 信号会向其它功能模块发送脉冲触发信号,其它功能模块如何相 应这个触发信号,则由对应的模块自己决定。