MATLAB分析系统稳定性的方法
判断系统稳定性
摘要现今数字信号处理理论与应用已成为一门很重要的高新科学技术学科,通过功能强大的MATLAB软件与数字信号处理理论知识相互融合在一起,既使我们对数字信号处理的理论知识能够有更加深厚的解也提高了动手能力,实践并初步掌握了MATLAB 的使用。
根据本次课题要求,通过使用MATLAB,方便了对系统函数的繁琐的计算,并且直观形象的用计算机进行模拟仿真,通过观察图,由图像的特征从而进一步的对系统进行形象的分析。
本课题中给出了系统函数,对其稳定性进行分析我们可以通过MATLAB画零极图观察极点的分布,另外还可以通过MATLAB分析系统的单位阶跃响应、单位脉冲响应、幅频相频特性的图形更加具体的对系统进行分析。
关键字:离散系统函数、MATLAB、零极点分布、系统稳定性。
一、设计原理1.设计要求(1):根据系统函数求出系统的零极点分布图并且判断系统的稳定性。
(2):求解系统的单位阶跃响应,并判断系统的稳定性。
(3):求系统的单位脉冲响应,并判断系统的稳定性(4):求出各系统频率响应,画出幅频特性和相频特性图(zp2tf,zplane,impz等)2、系统稳定性、特性分析进行系统分析时我主要利用MATLAB软件绘制出系统零极点的分布图、单位脉冲响应图、单位阶跃响应图等。
采用MATLAB 软件进行设计时我调用了软件本身的一些函数来对课题进行绘图和分析。
诸如zplane、impz、stepz、freqz等。
对系统函数的零极图而言:极点在单位圆内,则该系统稳定,极点在单位圆外,则该系统为非稳定系统。
当极点处于单位圆内,系统的冲激响应曲线随着频率的增大而收敛;当极点处于单位圆上,系统的冲激响应曲线为等幅振荡;当极点处于单位圆外,系统的冲激响应曲线随着频率的增大而发散。
系统的单位阶跃响应若为有界的则系统为稳定系统。
由以上的判据配合图形对系统的稳定性进行分析,达到我们的课程要求。
系统函数H(z)的零极点分布完全决定了系统的特性,若某系统函数的零极点已知,则系统函数便可确定下来。
Matlab技术控制系统性能分析指南
MatIab技术控制系统性能分析指南概论当今社会,控制系统已成为各种领域中重要的技术和应用之一。
它们被广泛用于工业自动化、机电设备、航天航空等众多领域中。
控制系统的性能分析是确保系统正常运行和提高系统性能的必要步骤。
Mat1ab作为一种功能强大的工具,为控制系统性能分析提供了多种方法和技术。
本文将介绍一些基本的MaIIab技术,帮助读者进行控制系统性能分析。
一、系统建模在进行控制系统性能分析之前,首先需要进行系统建模。
系统建模是将实际物理系统抽象为数学模型的过程。
掌握系统建模方法对于准确分析系统性能至关重要。
Mat1ab提供了一系列工具和函数,可以用于快速建立系统模型。
有两种常用的系统建模方法:时域建模和频域建模。
1.时域建模时域建模基于系统的时间响应特性。
通过测量系统的输入和输出信号,并对其进行采样和离散化,可以得到系统的差分方程。
MaUab中的State-space函数是进行时域建模的常用工具。
它可以根据系统的状态方程和输出方程生成系统模型。
可以使用如下代码进行建模:A=∏2;341;B=[1;1];C=[10];D=O;sys=ss(A,B,C,D);其中,A、B、C和D分别表示状态空间方程的系数矩阵。
利用该函数建立的系统模型可以方便地进行时域性能分析。
2.频域建模频域建模基于系统的频率响应特性。
通过测量系统的输入和输出信号的频谱,并进行信号处理,可以得到系统的传递函数。
Mat1ab中的tf函数是进行频域建模的常用工具。
它可以根据系统的传递函数生成系统模型。
可以使用如下代码进行建模:num=[1];den=[11];sys=tf(num,den);其中,num和den分别表示传递函数的分子和分母系数。
利用该函数建立的系统模型可以方便地进行频域性能分析。
二、系统性能评估建立了系统模型之后,就可以进行系统性能的评估了。
针对不同的性能指标,可以使用不同的分析方法。
1稳态误差分析稳态误差衡量了系统在输入信号为稳态信号时的输出误差。
线性系统稳定性分析的MATLAB分析方法

❖ 线性系统稳定性的判定 线性系统稳定性的判定主要依据线性系统
稳定的充分必要条件。判定其稳定性,可以用 代数法、根轨迹法、波特图法和奈奎斯特法
代数法
❖ 已知系统的开环传 递函数为:
6s(2s1) (s3)s(1)2(s2s1)
❖ MATLAB文本如下: >> den=[2 9 23 13 3]; >> roots(den) ❖ 运行结果为: ans =
s2 6s313s2
9s2
❖ MATLAB文本如下: G=tf([1 2],[1 6 13 9 2]); nyquist(G) ❖ 运行结果为:
Nyquist Diagram 1
0.8
0.6
0.4
Imaginary Axis
0.2
0
-0.2
-0.4
-0.6
-0.8
-1
-1 -0.8 -0.6 -0.4 -0.2
8 0.36
0.25
Root Locus
8
0.18 0.125 0.08 0.035 7
Imaginary Axis
6 0.5
4
0.75 2
0
-2 0.75
-4 0.5
-6
6
Hale Waihona Puke 5432
System: G Gain: 4.05 1
Pole: -0.00046 + 2.46i
Damping: 0.000187
Gm = 29.4 dB (at 39.9 rad/sec) , Pm = 73.7 deg (at 0.899 rad/sec) 50
Magnitude (dB)
基于MATLAB的电力系统暂态稳定仿真分析

基于MATLAB的电力系统暂态稳定仿真分析电力系统暂态稳定仿真分析是电力系统运行与控制中的重要内容之一、它通过模拟电力系统的暂态运行过程,分析系统在不同故障条件下的动态响应,评估系统的稳定性,并提供相应的控制与保护策略。
MATLAB作为一种功能强大的数学建模与仿真工具,被广泛应用于电力系统暂态稳定仿真分析中。
下面将分别从模型建立、仿真分析和结果评估三个方面,介绍基于MATLAB的电力系统暂态稳定仿真分析。
一、模型建立电力系统一般包括发电机、变电站、输电线路、负荷等元件。
在MATLAB中,可以通过建立系统的节点、支路和设备等模型,构建电力系统的仿真模型。
1.节点模型:电力系统的节点通常由发电机、负荷和母线组成。
在MATLAB中,可以通过定义节点的功率平衡方程和节点电压方程,建立节点模型。
2.支路模型:电力系统的支路一般包括输电线路、变压器和同步电动机等。
在MATLAB中,可以通过定义支路的电流-电压特性、阻抗和传输参数等,建立支路模型。
3.设备模型:电力系统的设备主要包括发电机、变压器和负荷等。
在MATLAB中,可以通过定义设备的功率-电流特性、阻抗和传输参数等,建立设备模型。
二、仿真分析建立电力系统的仿真模型后,可以使用MATLAB提供的仿真工具,进行仿真分析。
1.静态稳定分析:通过输入节点的电压和负载条件,计算各节点的电压和功率平衡,评估系统的静态稳定性。
2.动态稳定分析:在系统发生故障或负荷变化时,通过输入相应的故障或负荷变化信号,模拟系统的动态响应,并分析系统的中断时间和振荡特性等。
3.频域分析:通过对系统的输入和输出信号进行频谱分析,研究系统的频率特性和谐波性能,并评估系统的抗扰性能。
三、结果评估完成仿真分析后,需要对结果进行评估和优化。
1.稳定性评估:通过对系统的动态响应进行分析,评估系统在不同故障条件下的稳定性,并确定系统的稳定边界和临界条件。
2.控制与保护优化:根据仿真结果,确定适当的控制与保护策略,提高系统的稳定性和可靠性。
Matlab中的稳定性分析与边界值问题求解
Matlab中的稳定性分析与边界值问题求解在科学研究和工程实践中,我们经常会遇到稳定性分析和边界值问题求解。
在这方面,Matlab是一个非常强大和常用的工具。
Matlab提供了许多功能和工具箱,可以帮助我们解决各种稳定性分析和边界值问题求解的挑战。
在本文中,我将介绍Matlab中几种常见的稳定性分析和边界值问题求解的方法。
首先,我将介绍Matlab中的稳定性分析方法。
稳定性分析是研究系统的稳定性和响应的一个重要方法。
在Matlab中,我们可以使用频域方法和时域方法进行稳定性分析。
在频域方法中,最常用的方法是使用传递函数来分析系统的稳定性。
传递函数是系统的输入和输出之间的关系。
在Matlab中,我们可以使用tf函数来创建传递函数,并使用bode函数画出系统的频率响应曲线。
通过观察频率响应曲线的幅度和相位特性,我们可以判断系统的稳定性。
除了传递函数法,Matlab还提供了其他频域方法,如辛普森法和拟合法。
辛普森法是通过将连续系统离散化为差分系统,并使用辛普森法求解差分方程,来分析系统的稳定性。
拟合法是将系统的频率响应曲线与已知的理想响应曲线进行比较,从而判断系统的稳定性。
这些方法在Matlab中都有相应的函数和工具箱。
在时域方法中,最常用的方法是使用状态空间方法来分析系统的稳定性。
状态空间方法是通过将系统表示为状态向量和状态方程的形式,来研究系统的稳定性和响应。
在Matlab中,我们可以使用ss函数来创建状态空间模型,并使用step函数和impulse函数来绘制系统的阶跃响应和冲激响应。
通过观察系统的阶跃响应和冲激响应的曲线,我们可以判断系统的稳定性。
除了状态空间法,Matlab还提供了其他时域方法,如拉普拉斯法和小波法。
拉普拉斯法是通过将系统的输入和输出之间的关系表示为拉普拉斯变换的形式,来分析系统的稳定性和响应。
小波法是利用小波分析的原理,将信号分解为不同频率的成分,并通过观察系统的小波系数来判断系统的稳定性。
线性系统稳定性分析的MATLAB分析方法

MATLAB设计___________________________________________________ 线性系统稳定性分析的MATLAB分析方法电气工程学院班级:10自动化3班学号:姓名:指导老师:线性系统稳定性分析的MATLAB分析方法摘要:稳定是控制系统的重要性能,也是系统能够正常运行的首要条件。
控制系统在实际运行过程中,总会受到外界和内部一些因素的干扰,例如负载和能源的波动、系统参数的变化、环境条件的改变等等。
如果系统不稳定,就会在任何微小的扰动作用下偏离原来的平衡状态,并随时间的推移而发散。
因而,如何分析系统的稳定性并提出系统稳定的措施,是自动控制理论的基本任务之一。
由于MATLAB拥有丰富的数据类型和结构、友善的面向对象、快速精美的图形可视、更广泛的数学和数据分析资源控制系统工具箱的应用开发工具。
所以应用MATLAB来分析系统的稳定性将给系统稳定性的分析带来很大的便利。
关键词:自动控制理论、线性系统、稳定性、MATLAB引言:本次作业是运用MATLAB来分析线性系统的稳定性,是对MATLAB 加深理解和运用的一个重要环节。
本次作业以自动控制基础中线性系统稳定性的如何分析来开展。
通过自动控制中分析线性系统稳定性的原理与方法,以MATLAB为分析工具完成这次作业。
1.自动控制技术介绍在现代科学技术的众多领域中,自动控制技术起着越来越重要的作用。
所谓自动控制,就是指没有人直接参与的情况下,利用外加的设备或装置(称控制装置或控制器),使机器、设备或生产过程(统称被控对象)的某个工作状态或参数(被控量)自动地按照预定的规律运行。
1.1稳定性的基本概念任何系统在扰动作用下都会偏离原平衡状态,产生初始偏差。
所谓稳定性,是指系统在扰动消失后,由初始偏差状态恢复到原平衡状态的性能。
根据李雅普诺夫稳定性理论,线性系统的稳定性可叙述为:若线性控制系统在初始扰动的影响下,其动态过程随时间的推移逐渐衰减并趋于零(原平衡工作点),则称系统渐近稳定,简称稳定;反之,若在初始扰动影响下,系统的动态过程随时间的推移而发散,则称系统不稳定。
自动控制原理MATLAB仿真实验报告

实验一 MATLAB 及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点1、 系统的典型响应有哪些2、 如何判断系统稳定性3、 系统的动态性能指标有哪些 三、实验方法(一) 四种典型响应1、 阶跃响应:阶跃响应常用格式:1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。
2、),(Tn sys step ;表示时间范围0---Tn 。
3、),(T sys step ;表示时间范围向量T 指定。
4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。
2、 脉冲响应:脉冲函数在数学上的精确定义:0,0)(1)(0〉==⎰∞t x f dx x f其拉氏变换为:)()()()(1)(s G s f s G s Y s f ===所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式: ① )(sys impulse ; ②);,();,(T sys impulse Tn sys impulse③ ),(T sys impulse Y =(二) 分析系统稳定性 有以下三种方法:1、 利用pzmap 绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容 (一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出253722)(2342++++++=s s s s s s s G 的极点。
%Matlab 计算程序num=[3 2 5 4 6];den=[1 3 4 2 7 2];G=tf(num,den);pzmap(G);p=roots(den)运行结果: p =+ - + -P ole-Zero MapReal AxisI m a g i n a r y A x i s-2-1.5-1-0.500.5-1.5-1-0.50.511.5图1-1 零极点分布图由计算结果可知,该系统的2个极点具有正实部,故系统不稳定。
基于MATLAB的电力系统稳定性分析与仿真毕业论文
山东农业大学毕业论文基于MATLAB的电力系统稳定性分析与仿真装、丁院部机械与电子工程学院订专业班级电气3班线届次20**届_________学生姓名 _______________________学号 __________________________指导教师 ____________ 副教授二0**年六月六日摘要.................................................................................. .•...Abstract .. (II)1绪论................................................................................ 1...1.1课题背景................................................................. 1..1.2课题内容................................................................. 1..1.3课题意义................................................................. 1.. 2简单电力系统的静态稳定性及其仿真分析 (2)2.1电力系统静态稳定性简介 ...................................................... 2.2.2简单电力系统的静态稳定性仿真 (4)2.2.1Simulink模型构建及参数设置............................................ 4.2.2.2保持电势E q'=q。
'常数,励磁系统的综合放大系数为5.7857仿真分析 (7)2.3提高系统静态稳定性的措施 (9)2.3.1采用自动调节励磁装置 (9)2.3.2减小元件的电抗........................................................ 1.02.3.3提高线路标称电压等级 (10)2.3.4改善系统的结构和米用中间补偿设备 (11)3简单电力系统的暂态稳定性及其仿真分析 (11)3.1电力系统的暂态稳定性简介 (12)3.2 Simulink模型及仿真结果 ..................................................... 1.43.3提高系统暂态稳定性的措施 (18)3.3.1改变制动功率(发电机输出的电磁功率) .................................. 1 83.3.2改变原动功率(原动机输出的机械功率) .................................. 1 93.3.3系统失去稳定后的措施 (20)4总结与展望 (21)参考文献 (22)致谢................................................................................. 23.Contents Abstract.......................................................................................................................................... I I 1 In troduct ion . (1)1.1 Task background (1)1.2 Task contents (1)1.3 Task sig nifica nee (1)2 The static stability of power system and its simuli nk (2)2.1 In troduct ion of power system static stability (2)2.2 Simuli nk of power system static stability (4)2.2.1 Simuli nk model con struct ion and parameter setting (4)2.2.2 Keep ing voitage E q '=E q。
(整理)MATLAB实现控制系统稳定性分析.
MATLAB 实现控制系统稳定性分析稳定是控制系统的重要性能,也是系统能够工作的首要条件,因此,如何分析系统的稳定性并找出保证系统稳定的措施,便成为自动控制理论的一个基本任务.线性系统的稳定性取决于系统本身的结构和参数,而与输入无关.线性系统稳定的条件是其特征根均具有负实部. 在实际工程系统中,为避开对特征方程的直接求解,就只好讨论特征根的分布,即看其是否全部具有负实部,并以此来判别系统的稳定性,由此形成了一系列稳定性判据,其中最重要的一个判据就是Routh 判据.Routh 判据给出线性系统稳定的充要条件是:系统特征方程式不缺项,且所有系数均为正,劳斯阵列中第一列所有元素均为正号,构造Routh 表比用求根判断稳定性的方法简单许多,而且这些方法都已经过了数学上的证明,是完全有理论根据的,是实用性非常好的方法.但是,随着计算机功能的进一步完善和Matlab 语言的出现,一般在工程实际当中已经不再采用这些方法了.本文就采用Matlab 对控制系统进行稳定性分析作一探讨.1 系统稳定性分析的Matlab 实现1.1 直接判定法根据稳定的充分必要条件判别线性系统的稳定性,最简单的方法是求出系统所有极点,并观察是否含有实部大于0的极点,如果有,系统则不稳定.然而实际的控制系统大部分都是高阶系统,这样就面临求解高次方程,求根工作量很大,但在Matlab 中只需分别调用函数roots(den)或eig(A)即可,这样就可以由得出的极点位置直接判定系统的稳定性. 已知控制系统的传递函数为()245035102424723423+++++++=s s s s s s s s G (1) 若判定该系统的稳定性,输入如下程序:G=tf([1,7,24,24],[1,10,35,50,24]);roots(G.den{1})运行结果: ans =-4.0000-3.0000-2.0000-1.0000由此可以判定该系统是稳定系统.1.2 用根轨迹法判断系统的稳定性根轨迹法是一种求解闭环特征方程根的简便图解法,它是根据系统的开环传递函数极点、零点的分布和一些简单的规则,研究开环系统某一参数从零到无穷大时闭环系统极点在s 平面的轨迹.控制工具箱中提供了rlocus 函数,来绘制系统的根轨迹,利用rlocfind 函数,在图形窗口显示十字光标,可以求得特殊点对应的K 值.已知一控制系统,H(s)=1,其开环传递函数为:()()()21++=s s s K s G (2) 绘制系统的轨迹图.程序为: G=tf(1,[1 3 2 0]);rlocus(G);[k,p]=rlocfind(G)根轨迹图如图1所示,光标选定虚轴临界点,程序结果为:图1 系统的根轨迹图selected_point =0 - 0.0124ik =0.0248p =-2.0122-0.9751-0.0127光标选定分离点,程序结果为:selected_point =-1.9905 - 0.0124ik =0.0308p =-2.0151-0.9692-0.0158上述数据显示了增益及对应的闭环极点位置.由此可得出如下结论:(1)0<k<0.4时,闭环系统具有不同的实数极点,表明系统处于过阻尼状态;(2)k=0.4时,对应为分离点,系统处于临界阻尼状态;(3)0.4<k<6时,系统主导极点为共轭复数极,系统为欠阻尼状态;(4)k=6时,系统有一对虚根,系统处于临界稳定状态;(5)k>6时,系统的一对复根的实部为正,系统处于不稳定状态.1.3 用Nyquist曲线判断系统的稳定性Matlab提供了函数Nyquist来绘制系统的Nyquist曲线,若式(2)系统分别取k= 4和k= 10(图2为阶跃响应曲线),通过Nyquist曲线判断系统的稳定性,程序如下:num1=[4];num2=[10];den1=[1,3,2,0];gs1=tf(num1,den1);gs2=tf(num2,den1);hs=1;gsys1=feedback(gs1,hs);gsys2=feedback(gs2,hs);t=[0:0.1:25];figure(1);subplot(2,2,1);step(gsys1,t)subplot(2,2,3);step(gsys2,t)subplot(2,2,2);nyquist(gs1)subplot(2,2,4);nyquist(gs2)奈氏稳定判据的内容是:若开环传递函数在s平半平面上有P个极点,则当系统角频率X 由-∞变到+∞时,如果开环频率特性的轨迹在复平面上时针围绕(-1,j0)点转P圈,则闭环系统稳定,否则,是不稳定的.图2阶跃响应曲线当k=4时,从图3中k=4可以看出,Nyquist曲不包围(-1,j0)点,同时开环系统所有极点都位于平面左半平面,因此,根据奈氏判据判定以此构成闭环系统是稳定的,这一点也可以从图2中k=4系统单位阶跃响应得到证实,从图2中k=4可以看出系统约23 s后就渐渐趋于稳定.当k=10时,从图3中k=10可以看图3 Nyquist曲线出,Nyquist曲线按逆时针包围(-1,j0)点2圈,但此时P=0,所以据奈氏判据判定以此构成的闭环系统是不稳定的,图2中k=10的系统阶跃响应曲线也证实了这一点,系统振荡不定。
基于MATLAB的李雅普诺夫第二法稳定性分析

基于MATLAB的李雅普诺夫第二法稳定性分析李雅普诺夫第二法是一种广泛应用于非线性动力系统稳定性分析的方法。
在MATLAB中,我们可以利用多种功能和工具来实现这种分析。
在本文中,将介绍如何使用MATLAB进行李雅普诺夫第二法稳定性分析。
首先,我们将介绍李雅普诺夫第二法的基本概念,然后是在MATLAB中实现该方法的步骤和示例。
李雅普诺夫第二法是一种通过具有特定属性的李雅普诺夫函数来判断非线性系统的稳定性的方法。
具体来说,李雅普诺夫第二法通过找到一个正定函数V(x)以及一个正数a和b,使下式成立:a,x,^2≤V(x)≤b,x,^2其中x是系统状态,x,^2表示欧几里德范数的平方,a和b是正定的。
如果满足这个不等式,那么系统就是稳定的。
现在,我们将介绍在MATLAB中实现李雅普诺夫第二法的步骤。
首先,我们需要编写系统的状态方程。
这可以通过定义一个MATLAB函数来实现。
例如,考虑以下非线性系统:dx/dt = f(x)其中x是系统状态,f(x)是非线性函数。
我们可以将此方程定义为一个名为f.m的函数,它将系统状态作为输入,并返回状态变量的导数。
下面是一个简单的f.m文件的示例:function dxdt = f(x)dxdt = x^2 - x^4;接下来,我们需要选择一个合适的李雅普诺夫函数V(x)。
我们可以通过考虑系统的能量来选择一个合适的函数。
在这种情况下,我们可以选择V(x) = x^2,因为它是系统能量的一种度量方式。
然后,我们需要计算李雅普诺夫函数的时间导数Vdot(x)。
这可以通过将李雅普诺夫函数应用于系统的状态方程来实现。
在MATLAB中,我们可以利用符号计算工具箱来实现这一点。
下面是一个计算Vdot(x)的示例代码:syms xf_sym = x^2 - x^4;V=x^2;Vdot = diff(V, x) * f_sym;最后,我们需要使用MATLAB的求解器来满足条件的李雅普诺夫函数。
离散系统稳定性分析

实验一 离散系统稳定性分析实验学时:2 实验类型:常规 实验要求:必作一、实验目的:(1)掌握利用MATLAB 绘制系统零极点图的方法; (2)掌握离散时间系统的零极点分析方法;(3)掌握用MATALB 实现离散系统频率特性分析的方法; (4)掌握逆Z 变换概念及MATLAB 实现方法; (5)掌握用MATLAB 分析离散系统稳定性。
二、实验原理:1、离散系统零极点图及零极点分析;线性时不变离散系统可用线性常系数差分方程描述,即()()NMiji j a y n i b x n j ==-=-∑∑ (8-1)其中()y k 为系统的输出序列,()x k 为输入序列。
将式(8-1)两边进行Z 变换的00()()()()()Mjjj Nii i b zY z B z H z X z A z a z-=-====∑∑ (8-2) 将式(8-2)因式分解后有:11()()()Mjj Nii z q H z Cz p ==-=-∏∏ (8-3)其中C 为常数,(1,2,,)j q j M =为()H z 的M 个零点,(1,2,,)i p i N =为()H z 的N个极点。
系统函数()H z 的零极点分布完全决定了系统的特性,若某系统函数的零极点已知,则系统函数便可确定下来。
因此,系统函数的零极点分布对离散系统特性的分析具有非常重要意义。
通过对系统函数零极点的分析,可以分析离散系统以下几个方面的特性:● 系统单位样值响应()h n 的时域特性; ● 离散系统的稳定性;离散系统的频率特性; 1.1、零极点图的绘制设离散系统的系统函数为则系统的零极点可用MA TLAB 的多项式求根函数roots()来实现,调用格式为:p=roots(A)其中A 为待根求多项式的系数构成的行矩阵,返回向量p 则是包含多项式所有根的列向量。
如多项式为231()48B z z z =++,则求该多项式根的MA TLAB 命令为为: A=[1 3/4 1/8];P=roots(A) 运行结果为: P =-0.5000 -0.2500需注意的是,在求系统函数零极点时,系统函数可能有两种形式:一种是分子、分母多项式均按z 的降幂次序排列;另一种是分子、分母多项式均按1z -的升幂次序排列。
matlab实验报告
实验一:MATLAB基本操作一、实验目的1、学习掌握MA TLAB语言的基本操作方法2、掌握命令窗口的使用3、熟悉MA TLAB的数据表示、基本运算和程序控制语句4、熟悉MA TLAB程序设计的基本方法二、实验内容和要求2.b.帮助命令的使用,查找SQRT函数的使用方法按Start-help-search,输入sqrtc.矩阵运算(1)已知A=[1 2;3 4];B=[5 5;7 8];求A^2*B输入A=[1 2;3 4];B=[5 5;7 8];A^2*B结果为:ans =105 115229 251(2)矩阵除法已知A=[1 2 3 ;4 5 6;7 8 9];B=[1 0 0;0 2 0;0 0 3];求A/B,A\BA/B=1.0000 1.0000 1.00004.0000 2.5000 2.00007.0000 4.0000 3.0000A\B=1.0e+016 *0.3152 -1.2609 0.9457-0.6304 2.5218 -1.89130.3152 -1.2609 0.9457(3)矩阵的转置及共轭转置已知A=[15+i,2-i,1;6*i,4,9-i];求A.',A'A=15.0000 + 1.0000i 2.0000 - 1.0000i 1.00000 + 6.0000i 4.0000 9.0000 - 1.0000iA.'=15.0000 + 1.0000i 0 + 6.0000i2.0000 - 1.0000i 4.00001.0000 9.0000 - 1.0000iA'=15.0000 - 1.0000i 0 - 6.0000i2.0000 + 1.0000i 4.00001.0000 9.0000 + 1.0000i(4)使用冒号选出指定元素已知A=[1 2 3;4 5 6;7 8 9];求A中第三列前两个元素;A中所有第二行的元素A =1 2 34 5 67 8 9求A中第三列前两个元素:A([1,2],3)ans =36求A中所有第二行的元素:A(2,1:1:end)ans =4 5 6(5)方括号[]用magic函数生成一个4阶魔方矩阵,删除该矩阵的第四列magic(4)ans =16 2 3 135 11 10 89 7 6 124 14 15 1a=ans;a(:,[1,2,3])ans =16 2 35 11 109 7 64 14 153..多项式(1)求多项式p(X)=x^3-2x-4的根(2)已知A=[1.2 3 5 0.9;5 1.7 5 6;3 9 0 1;1 2 3 4]求矩阵A的特征多项式;求矩阵多项式中未知数为20时的值;把矩阵A作为未知数代入到多项式中;(1)a=[1,0,-2,-4]x=roots(a)x =2.0000-1.0000 + 1.0000i-1.0000 - 1.0000i(2)求特征多项式系数:A=[1.2 3 5 0.9;5 1.7 5 6;3 9 0 1;1 2 3 4]p=poly(A)p =1.0000 -6.9000 -77.2600 -86.1300 604.5500求矩阵多项式中未知数为20时的值:c=polyval(p,20)c =7.2778e+004把矩阵A作为未知数代入到多项式中:c=polyval(p,A)c =1.0e+003 *0.3801 -0.4545 -1.9951 0.4601-1.9951 0.2093 -1.9951 -2.8880-0.4545 -4.8978 0.6046 0.43530.4353 0.0840 -0.4545 -1.16174、基本程序设计(1)编写命令文件:计算1+2+3+……+n<2000;n=0;s=0;while s<2000n=n+1;s=s+n;endn=n-1n =62(2)编写函数文件:分别用for和while循环结构编写程序,求2的0到n次幂的和。
matlab对线性系统稳定性的分析

MATLAB对线性系统稳定性的分析摘要:本文对线性系统从时域、复域和频域进行了稳定性分析,总结了控制系统的主要判据,分析过程简单,结合实例验证了其真实性、有效性。
关键词:线性系统稳定性 MATLAB引言:一个控制系统要能正常工作,必须首先是一个稳定的系统,即当系统受到外界干扰后,虽然它的平衡状态被破坏,但在外扰去掉以后,它仍有能力自动地在平衡状态下继续工作。
在已知一个系统的系统函数或状态空间表达式时,就可以对其系统的稳定性进行分析。
但当系统的阶次较高时,绘图和计算需要花费大量的时间和精力。
MATLAB是一套高性能的数值计算和可视化软件,并拥有几十个工具箱,借助MATLAB的系统工具箱,就可以直观、方便地分析系统的稳定性。
1、控制系统稳定性定义关于稳定性的定义有许多种,较典型的说法有两种:一种是由俄国学者李雅普诺夫首先提出的平衡状态稳定性,另一种指系统的运动稳定性。
对于线线控制系统而言,这两种说法是等价的。
根据李雅普诺夫稳定性理论,线性控制系统的稳定性可以定义如下:若线性控制系统在初始扰动的影响下,其过渡过程随着时间的推移逐渐衰减并趋向于零,则称该系统为渐近稳定,简称为稳定;反之,若在初始扰动影响下,系统的过渡过程随时间的推移而发散,则称系统为不稳定。
由上述稳定性定义可以推知,线性系统稳定的充分必要条件是:闭环系统特征方程的根都具有负实部,或者说闭环传递函数的极点均位于左半S开平面(不包括虚轴)。
2、系统稳定性分析方法概述在经典控制理论中,常用时域分析法、复域分析法或频率分析法来分析控制系统的性能。
不同的方法有不同的适用范围,下面对上述方法进行具体研究。
2.1时域分析法在经典控制理论中,时域分析法是一种直接在时间域中对系统进行稳定性分析的方法,具有直观、准确的优点,并且可以提供系统时间响应的全部信息。
在时域分析系统的稳定性,必须研究在输入信号作用下,当时间t趋于无穷时,系统的输出响应趋于最终期值h(∞)。
MATLAB绘制自控图像及分析

常用频域分析函数
nyquist a,b,c,d,iu :可得到从系统第iu个输入到所有输出的极坐标图。
nyquist num,den :可绘制出以连续时间多项式传递函数表示的系统的极 坐标图。
nyquist a,b,c,d,iu,w 或nyquist num,den,w :可利用指定的角频率矢量绘制 出系统的极坐标图。
2、奈奎斯特图 幅相频率特性图
对于频率特性函数G jw ,给出w从负无穷到正无穷的一系列数值,分别求 出Im G jw 和Re G jw 。以Re G jw 为横坐标, Im G jw 为纵坐标绘制成 为极坐标频率特性图。
MATLAB提供了函数nyquist 来绘制系统的极坐标图,其用法如下:
nyquist a,b,c,d :绘制出系统的一组Nyquist曲线,每条曲线相应于连续状 态空间系统 a,b,c,d 的输入/输出组合对。其中频率范围由函数自动选取,而 且在响应快速变化的位置会自动采用更多取样点。
freqs 函数
freqs用于计算由矢量a和b构成的模拟滤波器H s =B s /A s 的幅频响
应。
H (s)B A ( (s s) ) b 1 (1 )s s n m a b (( 2 2 )) s s n m 1 1 ... . a .b .(( n m 1 ) 1 )
h=freqs b,a,w 用于ቤተ መጻሕፍቲ ባይዱ算模拟滤波器的幅频响应,其中实矢量w用于指 定频率值,返回值h为一个复数行向量,要得到幅值必须对它取绝对值, 即求模。
自动控制原理仿真实验课程智慧树知到答案2024年山东大学
自动控制原理仿真实验课程山东大学智慧树知到答案2024年绪论单元测试1.本实验课程中所采用的实验工具为MATLAB计算软件。
A:错 B:对答案:B项目一测试1.控制系统数学模型的实验目的是()。
A:掌握多环节串联连接时整体传递函数的求取方法 B:掌握多环节反馈连接时整体传递函数的求取方法 C:掌握用MATLAB创建各种控制系统模型 D:掌握多环节并联连接时整体传递函数的求取方法答案:ABCD2.运用Matlab创建控制系统数学模型实验中介绍了()个实验原理。
A:4个 B:2个 C:5个 D:3个答案:C3.Feedback()与Cloop()函数中的sign参数表示的意义是不一样的。
()A:错 B:对答案:A4.用Matlab将传递函数转换为零极点形式的程序代码是()。
A:num=[1,3,2,1,1]; den=[1,4,3,2,3,2];G1=tf(num1, den1); G=zpk(G1)B:num1=[1,3,2,1,1]; den=[1,4,3,2,3,2];G1=tf(num, den1); G=zpk(G1)C:num1=[1,3,2,1,1]; den1=[1,4,3,2,3,2];G1=tf(num, den); G=zpk(G1)D:num=[1,3,2,1,1]; den=[1,4,3,2,3,2];G1=tf(num, den); G=zpk(G1)答案:D5.用Matlab将传递函数表达式转换成多项式的程序代码是()。
A:num= [15, 45]; den=conv(conv([1,1],[1,5]),[1,15]); G=tf(num1, den1)B:num= [15, 45]; den=conv(conv([1,1] [1,5]) [1,15]); G=tf(num, den) C:K=15;Z=[-3]; P=[-1;-5;-15]; G1=zpk(Z,P,K); G=tf(G1) D:K=15; Z=[-3]; P=[-1;-5;-15];G=zpk(Z,P,K)答案:AC项目二测试1.典型环节模拟方法及动态特性的实验目的是()。
MATLAB分析系统稳定性的方法
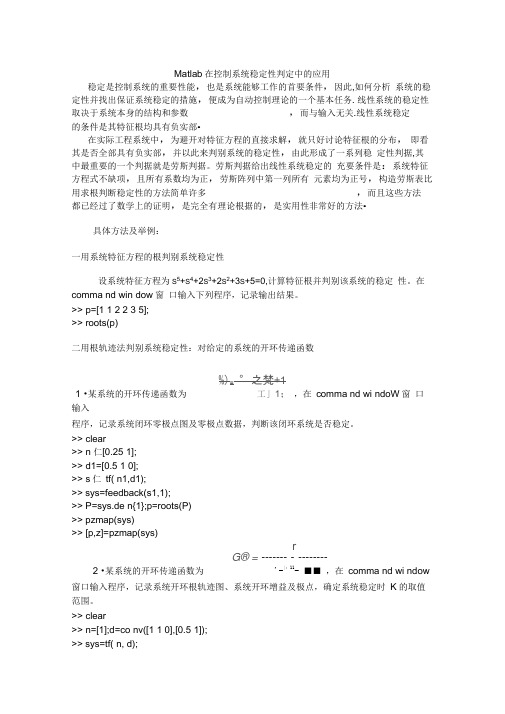
Matlab在控制系统稳定性判定中的应用稳定是控制系统的重要性能,也是系统能够工作的首要条件,因此,如何分析系统的稳定性并找出保证系统稳定的措施,便成为自动控制理论的一个基本任务. 线性系统的稳定性取决于系统本身的结构和参数,而与输入无关.线性系统稳定的条件是其特征根均具有负实部•在实际工程系统中,为避开对特征方程的直接求解,就只好讨论特征根的分布,即看其是否全部具有负实部,并以此来判别系统的稳定性,由此形成了一系列稳定性判据,其中最重要的一个判据就是劳斯判据。
劳斯判据给出线性系统稳定的充要条件是:系统特征方程式不缺项,且所有系数均为正,劳斯阵列中第一列所有元素均为正号,构造劳斯表比用求根判断稳定性的方法简单许多,而且这些方法都已经过了数学上的证明,是完全有理论根据的,是实用性非常好的方法•具体方法及举例:一用系统特征方程的根判别系统稳定性设系统特征方程为S5+S4+2S3+2S2+3S+5=0,计算特征根并判别该系统的稳定性。
在comma nd win dow窗口输入下列程序,记录输出结果。
>> p=[1 1 2 2 3 5];>> roots(p)二用根轨迹法判别系统稳定性:对给定的系统的开环传递函数%)=°之梵+11 •某系统的开环传递函数为工」1;,在comma nd wi ndoW窗口输入程序,记录系统闭环零极点图及零极点数据,判断该闭环系统是否稳定。
>> clear>> n 仁[0.25 1];>> d1=[0.5 1 0];>> s仁tf( n1,d1);>> sys=feedback(s1,1);>> P=sys.de n{1};p=roots(P)>> pzmap(sys)>> [p,z]=pzmap(sys)rG® = ------- - --------2 •某系统的开环传递函数为'-|:11- ■■ ,在comma nd wi ndow 窗口输入程序,记录系统开环根轨迹图、系统开环增益及极点,确定系统稳定时K的取值范围。
MATLABsimulink稳定性分析时域分析
Re( pi ) 0,i 1,2, , n
对于离散时间系统,如果系统全部极点都位于Z平 面的单位圆内,则系统是稳定的;否则系统是不稳定 的。
pi 1,i 1,2, , n 2
直接判定方法
对于传递函数模型tf(num,den),利用求根 函数roots(den)来求极点。对于状态空间模型 SS(A,B,C,D)利用求特征值函数eig(A)来求特征 值。这样根据极点或特征值即可直接判定系统 的稳定性。
[u,t]=gensig(type,Ta,Tf,T)
其中:产生一个类型为type的信号序列u(t), type为 以下标识字符串之一:’sin’—正弦波;’square’— 方波;’pulse’—脉冲序列,Ta为周期,Tf为持续时 间,T为采样时间。
运行结果显示: System is Stable
8
3. 利用李雅普诺夫第二法来判断系统的稳定性
线性定常连续系统
x Ax
在平衡状态xe=0处渐近稳定的充要条件是:对任给的 一个正定对称矩阵Q,存在一个正定的对称矩阵P,
且满足李雅普诺夫方程
ATP+PA=-Q
而标量函数V(x)=xTPx是这个系统的一个二次型李雅
roots(d) 运行结果显示:
ans =
-12.8990
-5.0000
-3.1010
4
例7-1 已知闭环系统的传递函数为
G(s) 3s4 2s3 s2 4s 2 3s5 5s4 s3 2s2 2s 1
试判断系统的稳定性,并给出不稳定极点。
解:MATLAB程序如下
10
利用Matlab进行控制系统设计和分析

利用Matlab进行控制系统设计和分析控制系统是各个工程领域中不可或缺的一部分。
它可以用来控制机器人、飞行器、电机以及其他众多的实际工程应用。
Matlab作为一种功能强大的数值计算软件,提供了丰富的工具和函数来进行控制系统设计和分析。
本文将介绍如何利用Matlab来进行控制系统的设计和分析。
一、控制系统基本概念在开始之前,我们先来了解一些控制系统的基本概念。
控制系统由三个基本组成部分构成:输入、输出和反馈。
输入是指信号或者指令,输出则是系统对指令的响应,而反馈则是输出信号对系统输入的影响。
二、Matlab中的控制系统工具箱Matlab提供了专门用于控制系统设计和分析的工具箱。
其中最重要的是Control System Toolbox。
该工具箱中包含了一系列用于控制系统设计和分析的函数和工具。
使用Control System Toolbox,我们可以很方便地进行控制系统的建模、设计和分析。
三、控制系统的建模控制系统的建模是指将实际系统抽象为数学模型。
在Matlab中,我们可以使用State Space模型、Transfer Function模型以及Zero-Pole-Gain模型来描述控制系统。
1. 状态空间模型状态空间模型是一种常用的描述系统动态响应的方法。
在Matlab中,我们可以使用stateSpace函数来创建状态空间模型。
例如,我们可以通过以下方式创建一个简单的二阶状态空间模型:A = [0 1; -1 -1];B = [0; 1];C = [1 0];D = 0;sys = ss(A, B, C, D);2. 传递函数模型传递函数模型是另一种常用的描述系统动态响应的方法。
在Matlab中,我们可以使用tf函数来创建传递函数模型。
例如,我们可以通过以下方式创建一个简单的一阶传递函数模型:num = 1;den = [1 2];sys = tf(num, den);3. 零极点增益模型零极点增益模型是用来描述系统频域特性的一种方法。
自动控制原理MATLAB仿真实验报告
实验一 MATLAB 及仿真实验(控制系统的时域分析)一、实验目的学习利用MATLAB 进行控制系统时域分析,包括典型响应、判断系统稳定性和分析系统的动态特性; 二、预习要点1、 系统的典型响应有哪些?2、 如何判断系统稳定性?3、 系统的动态性能指标有哪些? 三、实验方法(一) 四种典型响应1、 阶跃响应:阶跃响应常用格式:1、)(sys step ;其中sys 可以为连续系统,也可为离散系统。
2、),(Tn sys step ;表示时间范围0---Tn 。
3、),(T sys step ;表示时间范围向量T 指定。
4、),(T sys step Y =;可详细了解某段时间的输入、输出情况。
2、 脉冲响应:脉冲函数在数学上的精确定义:0,0)(1)(0〉==⎰∞t x f dx x f其拉氏变换为:)()()()(1)(s G s f s G s Y s f ===所以脉冲响应即为传函的反拉氏变换。
脉冲响应函数常用格式: ① )(sys impulse ; ②);,();,(T sys impulse Tn sys impulse③ ),(T sys impulse Y = (二) 分析系统稳定性 有以下三种方法:1、 利用pzmap 绘制连续系统的零极点图;2、 利用tf2zp 求出系统零极点;3、 利用roots 求分母多项式的根来确定系统的极点 (三) 系统的动态特性分析Matlab 提供了求取连续系统的单位阶跃响应函数step 、单位脉冲响应函数impulse 、零输入响应函数initial 以及任意输入下的仿真函数lsim.四、实验内容 (一) 稳定性1. 系统传函为()27243645232345234+++++++++=s s s s s s s s s s G ,试判断其稳定性2. 用Matlab 求出253722)(2342++++++=s s s s s s s G 的极点。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
Matlab在控制系统稳定性判定中的应用
稳定是控制系统的重要性能,也是系统能够工作的首要条件,因此,如何分析系统的稳定性并找出保证系统稳定的措施,便成为自动控制理论的一个基本任务.线性系统的稳定性取决于系统本身的结构和参数,而与输入无关.线性系统稳定的条件是其特征根均具有负实部.
在实际工程系统中,为避开对特征方程的直接求解,就只好讨论特征根的分布,即看其是否全部具有负实部,并以此来判别系统的稳定性,由此形成了一系列稳定性判据,其中最重要的一个判据就是劳斯判据。
劳斯判据给出线性系统稳定的充要条件是:系统特征方程式不缺项,且所有系数均为正,劳斯阵列中第一列所有元素均为正号,构造劳斯表比用求根判断稳定性的方法简单许多,而且这些方法都已经过了数学上的证明,是完全有理论根据的,是实用性非常好的方法.
具体方法及举例:
一用系统特征方程的根判别系统稳定性
设系统特征方程为s5+s4+2s3+2s2+3s+5=0,计算特征根并判别该系统的稳定性。
在command window窗口输入下列程序,记录输出结果。
>> p=[1 1 2 2 3 5];
>> roots(p)
二用根轨迹法判别系统稳定性:对给定的系统的开环传递函数
1.某系统的开环传递函数为,在command window窗口输入程序,记录系统闭环零极点图及零极点数据,判断该闭环系统是否稳定。
>> clear
>> n1=[0.25 1];
>> d1=[0.5 1 0];
>> s1=tf(n1,d1);
>> sys=feedback(s1,1);
>> P=sys.den{1};p=roots(P)
>> pzmap(sys)
>> [p,z]=pzmap(sys)
2.某系统的开环传递函数为,在command window 窗口输入程序,记录系统开环根轨迹图、系统开环增益及极点,确定系统稳定时K的取值范围。
>> clear
>> n=[1];d=conv([1 1 0],[0.5 1]);
>> sys=tf(n,d);
>> rlocus(sys)
>> [k,poles]=rlocfind(sys)
频率特性法判别系统的稳定性
三 BODE图法:
1.已知系统开环传递函数,在command window窗口输入程序,用Bode图法判稳,记录运行结果,并用阶跃相应曲线验证(记录相应曲线)
1)绘制开环系统Bode图,记录数据。
>> num=75*[0 0 0.2 1];
>> den=conv([1 0],[1 16 100]);
>> sys=tf(num,den);
>> [Gm,Pm,Wcg,Wcp]=margin(sys)
>> margin(sys)
2)绘制系统阶跃响应曲线,证明系统的稳定性。
>> num=75*[0 0 0.2 1];
>> den=conv([1 0],[1 16 100]);
>> s=tf(num,den);
>> sys=feedback(s,1);
>> t=0:0.01:30;
>> step(sys,t)
四 Nyquist图法
1.已知系统开环传递函数,在command window窗口输入程序,用Nyquist图法判稳,记录运行结果,并用阶跃相应曲线验证(记录相应曲线)。
1)绘制Nyquist图,判断系统稳定性。
>> clear
>> num=[10000];
>> den=[1 5 100 0];
>> GH=tf(num,den);
>> nyquist(GH)
五用阶跃响应曲线验证系统的稳定性
已知系统开环传递函数判断系统的稳定性
程序如下:
>> num=[10000];
>>den=[1 5 100 0];
>> s=tf(num,den);
>> sys=feedback(s,1);
>> t=0:0.01:0.6;
>> step(sys,t)
学习心得与体会
通过这几周的MATLAB课程的学习,我了解到了MATLAB在自动控制系统分析中的重要意义,在学习过程中,我体会到了MATLAB的在控制系统分析中的快速性与方便性.在学习中也遇到了不少问题,经过老师的细心指导,对MATLAB的学习能够更进一步.最后,感谢老师对我学习上的帮助和鼓励.。